Заявляемое изобретение относится к области обеспечения безопасности реактора, в частности, к способу аварийной остановки реактора на основании состояния сигналов приборов, важных для безопасности АЭС.
Система аварийной остановки реактора (RTS) обеспечивает самый высокий уровень безопасности на атомной электростанции (АЭС) и характеризуется структурой с четырьмя резервированными каналами. Принципом работы системы является наблюдение в режиме реального времени за измерительными сигналами точек контроля, важных для безопасности АЭС. Аварийная остановка реактора немедленно срабатывает в целях приоритетного обеспечения безопасности реактора в случае, когда вышеуказанные сигналы превышают установленный допустимый предел в эксплуатации (или косвенное расчетное значение превышает установленный допустимый предел в эксплуатации).
В целях предотвращения негативного влияния отказа одного прибора или канала на работоспособность системы RTS, в каждой точке контроля, важной для безопасности, как правило, укомплектованы четыре взаимно резервированных измерительных прибора (датчики или детекторы), сигналы которых передаются в четыре резервированных канала системы RTS соответственно. Однако, поскольку приборы безопасности АЭС и системы управления стали более компьютеризированными, появились трудности в режимах неисправности сигнала, такие как:
а) неисправности источников сигнала, например, неисправности пробоотборных линий, датчиков т.д.;
б) неисправность сигнальной цепи, например, перегорание предохранителя электроснабжения, сигнального предохранителя, отказ в цепи и т.д.;
в) нарушение обмена сигналами между каналами, например, ошибка каналов распределения сигналов, неисправность связи между каналами и т.д.;
г) неисправность системного программного обеспечения, например, неисправность программного обеспечения интеллектуальных приборных систем, таких как: система внутриреакторного контроля (СВРК), аппаратура контроля нейтронного потока (АКНП), автоматизированная система радиационного контроля (АСРК);
д) неисправности системы аппаратного обеспечения, например, сбои в модуле энергоснабжения, модуле сигнала, модуле связи, модуле логической обработки для шкафа контроллера и т.д.
Неисправность нескольких из четырех измерительных сигналов прибора в точке контроля, важной для безопасности, приводит к ограничению или потере (частично или полностью) заданной функции аварийной остановки реактора, и снижению уровня эксплуатационной безопасности АЭС.
В качестве прототипа к заявляемому способу принят способ работы управляющей системы атомной электростанции (RU 2598649 С1, 27.09.2016), при котором станции ввода вывода CBB1-n каждого канала безопасности принимают аналоговые и двоичные сигналы технологического процесса, преобразуют их в цифровую форму и передают в контроллер автоматизации канала безопасности КА СБ 2. Контроллер КА СБ 2 преобразует принятые цифровые значения аналоговых сигналов в технологические параметры процесса, передает их по межпроцессорному интерфейсу МПИ 6 в контроллеры автоматизации КА СБ 2 других каналов безопасности. Собирают значения двоичных сигналов, при этом контроллер КА СБ 2 преобразует принятые цифровые значения двоичных сигналов в технологические параметры процесса, передает их по межпроцессорному интерфейсу МПИ 6 в контроллеры автоматизации КА СБ 2 других каналов безопасности. В случае обнаружения в результате анализа входных параметров процесса аварийной ситуации осуществляют остановку реактора. Если контроллер КА СБ 2 обнаруживает в результате анализа входных параметров процесса аварийную ситуацию, он формирует и выдает команды инициирования защитных действий в станции приоритетного управления СПУ1-m3 своего канала безопасности и в станции СПУ 3 других каналов безопасности на втором уровне межканального обмена. Если аварийная ситуация требует останова реактора, то КА СБ 2 выдает в станцию СВВ 3 команду управления СУЗ. Контроллер КА СБ 2 принимает параметры процесса от этих каналов безопасности и производит программный выбор параметров для дальнейшей обработки по мажоритарному правилу "2 из 4-х" на первом уровне межканального обмена и мажоритарного резервирования.
У прототипа неизвестны количество датчиков в каждой точке контроля, отсутствует идентификация для выходных сигналов в соответствии с заданными условиями. Также неизвестно наличие модуля сбора состояния сигналов в программном обеспечении системы RTS в целях формирования значения состояния сигналов. Это снижает уровень эксплуатационной безопасности.
Решаемой технической проблемой является необходимость обеспечения безопасности АЭС на основе состояния сигналов приборов, важных для безопасности АЭС по отношению к существующей сложной ситуации в технической области. При этом необходимо обеспечить контроль в реальном времени за состоянием сигналов приборов в точках контроля, важных для безопасности АЭС. При этом необходимо обеспечить автоматическую остановку реактора при неисправности нескольких сигналов приборов в одной точке контроля. При этом предотвращается ухудшение функции защиты реактора, вызванное отказом измерительного сигнала, и повышается уровень безопасности работы АЭС.
Раскрытие заявляемого технического решения.
Техническим результатом, обеспечиваемым заявляемым изобретением, является обеспечение аварийной остановки реактора на основании состояния сигналов приборов, важных для безопасности АЭС.
Другими техническими результатами являются:
- контроль в реальном времени состояния сигналов приборов в точках контроля, важных для безопасности АЭС;
- обеспечение автоматической остановки реактора при неисправности нескольких сигналов приборов в одной точке контроля.
Сущность заявленного технического решения состоит в том, что способ аварийной остановки реактора на основании сигналов приборов о показателях, важных для безопасности атомной электростанции (АЭС), характеризуется тем, что на первом этапе разделяют сигналы приборов безопасности АЭС на аналоговые и дискретные, на втором этапе собирают значения аналоговых сигналов, на третьем этапе собирают значения дискретных сигналов, на четвертом этапе осуществляют алгоритм аварийной остановки реактора на основании значений состояния сигналов, при этом на втором упомянутом этапе осуществляют нижеуказанные действия:
- этап (2.1): аналоговые сигналы формируются датчиками, расположенными в точках контроля станции, при этом в каждой точке контроля располагают четыре взаимно резервированных датчика, причем сигналы четырех датчиков одной точки контроля поступают в четыре резервированных канала системы аварийной остановки реактора (RTS) в виде тока 4 -20 мА;
- этап (2.2): датчики запитывают от модуля энергоснабжения и сбора сигналов, который передает отрегулированный ток в модуль ввода аналоговых сигналов (AI);
- этап (2.3): посредством модуля ввода аналоговых сигналов (AI) преобразуют полученные значения тока в сигналы, считываемые системой вычислительной машины, и передают в модуль преобразования физической величины;
- этап (2.4): посредством модуля преобразования физической величины преобразуют машиночитаемые сигналы с признаком значения тока в сигналы физической величины с признаком технологических параметров в точках контроля, в том числе значения давления, температуры и расхода, которые поступают в логический модуль остановки реактора для расчета логики остановки реактора, результат вычисления, представляющий собой логическую операцию «или», передают в модуль преобразования дискретных сигналов (DO);
- этап (2.5): осуществляют контроль состояния сигналов в модуле преобразования физической величины, при этом идентифицируют выходные сигналы модуля в соответствии с заданными условиями, при этом допустима погрешность 5% для принятых модулем входных сигналов тока в расчетных пределах 4-20 мА, при этом выходной сигнал в виде сигнала с характеристикой технологического параметра точки контроля преобразуется и идентифицируется в качестве полезного сигнала, при этом если отклонение входного сигнала с признаком значения тока превышает 5% от расчетного диапазона, при этом входное значение тока меньше 3,2 мА или больше 20,8 мА, то значение выходного сигнала задают параметрами верхнего и нижнего пределов, и состояние сигнала идентифицируют в качестве сигнала неисправности;
- этап (2.6): в программном обеспечении системы RTS используют добавленный модуль сбора состояния сигналов, значение состояния для полезных сигналов составляет «0», а для сигналов неисправности - «1»,
при этом на третьем этапе осуществляют нижеуказанные действия:
- этап (3.1): дискретные сигналы получают после того, как посредством системы ядерных приборов рассчитывают измерительные сигналы датчиков для показания превышения порога ключевых параметров во время эксплуатации реактора, при этом датчики подразделяют на четыре группы, при этом измерительные сигналы передают в четыре резервированные системы ядерных приборов соответственно, по результатам вычисления которых определяют превышение порога ключевых параметров, сигналы в виде напряжения 0 В или 24 В передают в четыре резервированных канала системы RTS соответственно;
- этап (3.2): инициирующую цепь в системе ядерных приборов запитывают от модуля энергоснабжения сигнала, в инициирующей цепи используют две ветки обратной связи - обратная связь нижнего и верхнего уровня, при превышении порога и срабатывании расчетного значения в системе ядерных приборов два сигнала обратной связи меняют местами;
- этап (3.3): посредством входного модуля преобразования дискретных сигналов DI получают два сигнала обратной связи от системы ядерных приборов и преобразуют полученные значения напряжения в считываемые системой вычислительной машины сигналы с последующей передачей их в модуль преобразования цифровой величины;
- этап (3.4): посредством модуля преобразования цифровой величины преобразуют считываемые вычислительной машиной сигналы значения напряжения в цифровые сигналы с признаком превышения порога технологических параметров на местах расположения датчиков, в том числе превышение порога цикла реактивности и уровня радиоактивности трубопроводов, эти цифровые сигналы передают для расчета в модуль логики остановки реактора, результат расчета передают в модуль преобразования дискретных сигналов после логической операции «или»;
- этап (3.5): осуществляют контроль состояния сигналов в модуле преобразования цифровой величины, при этом проводят идентификацию для выходных сигналов модуля в соответствии с заданными условиями, два входных сигнала характеризующих напряжение преобразуют в выходящие в качестве цифровой величины после преобразования в случае, если они находятся в расчетных пределах, при этом напряжение одного из них составляет 0 В, а другого - 24 В, при этом состояния сигналов идентифицируют в качестве полезных сигналов, при этом если два входных сигнала, характеризующих напряжение выходят за расчетные пределы, при этом напряжение двух веток одновременно составляет 0 В или 24 В, то выходное значение сигнала используют как значение по умолчанию и состояния сигналов идентифицируют в качестве сигналов неисправности;
- этап (3.6): дополнительно используется модуль сбора состояния сигналов в программном обеспечении системы RTS в целях формирования значения состояния сигналов, при этом значение состояния для полезных сигналов составляет «0», а для сигналов неисправности - «1».
В частных случаях допустимо выполнять техническое решение следующим образом.
На первом этапе используют входной ток аналоговых сигналов, составляющий 4-20 мА, входное напряжение дискретных сигналов, составляющее 0 или 24 В, напряжение дискретных сигналов, составляющее 0 или 24 В, при этом эти типы сигналов преобразуют в цифровые сигналы, считываемые системой вычислительной машины через модуль ввода аналоговых сигналов и модуль ввода дискретных сигналов соответственно и передают в систему программного обеспечения для логической обработки и вычисления.
На втором этапе в аналоговые сигналы включают мощность реактора, напряжение действующих шин, частота действующих шин, перепад давления главного циркуляционного насоса (ГЦНа), мощность ГЦНа, температура первого контура, давление активной зоны (АЗ), уровень компенсатора давления (КД), давление в защитной оболочке (ЗО), уровень жидкости в парогенераторе (ПГ), давление главного паропровода, расход питательной воды парогенератора (ПГ).
На третьем этапе в дискретные сигналы включают превышение порога цикла реактивности, превышение порога плотности нейтронов, превышение порога линейного энерговыделения топливного стержня (ТС), превышение порога запаса до кризиса кипения, превышение порога радиоактивности главного паропровода, превышение порога ускорения перемещения в землетрясении, превышение порога напряжения выключателя остановки реактора.
На упомянутом четвертом этапе осуществляют нижеследующие действия:
- этап (4.1): собранные значения состояния сигналов используют для реализации логической операции аварийной остановки реактора на основании значений состояния сигналов, при этом значение сигналов без идентификации состояния передают в первоначальный модуль логической операции остановки реактора;
- этап (4.2): значения состояния четырех сигналов одной точки контроля собирают в целях логического вычисления операции «3 из 4», при этом логическое вычисление «2 из 4» осуществляют для соответствующих сигналов реактивности активной зоны (АЗ), при этом по отношению к измерительным сигналам резервированных технологических систем осуществляют «2 из 3» для значений состояния сигналов каждой технологической системы с последующим логическим вычислением «3 из 4» для результатов вычисления «2 из 3» каждой технологической системы;
- этап (4.3): если несколько из четырех входных сигналов в одной точке контроля одновременно составляют «1» и превышают заданное значение, то данную точку контроля определяют как ненадежную, во избежание снижения категории защитной функции реакторной установки (РУ) АЭС из-за отказа сигналов приборов, обеспечивают немедленное срабатывание сигнала аварийной остановки реактора;
- этап (4.4): состояния сигналов каждой точки контроля выбирают логической операцией «или» после вычисления, предусмотренного на этапах 4.1-4.3, с последующим вычислением «или» первоначальной логической операции остановки реактора, тем самым реализуют интегрирование новой и первоначальной логических операций остановки реактора, при этом сформированные после интегрирования сигналы аварийной остановки реактора преобразуют в электрические сигналы через модуль преобразования дискретных сигналов и формируют окончательную команду аварийной остановки реактора.
Краткое описание чертежей.
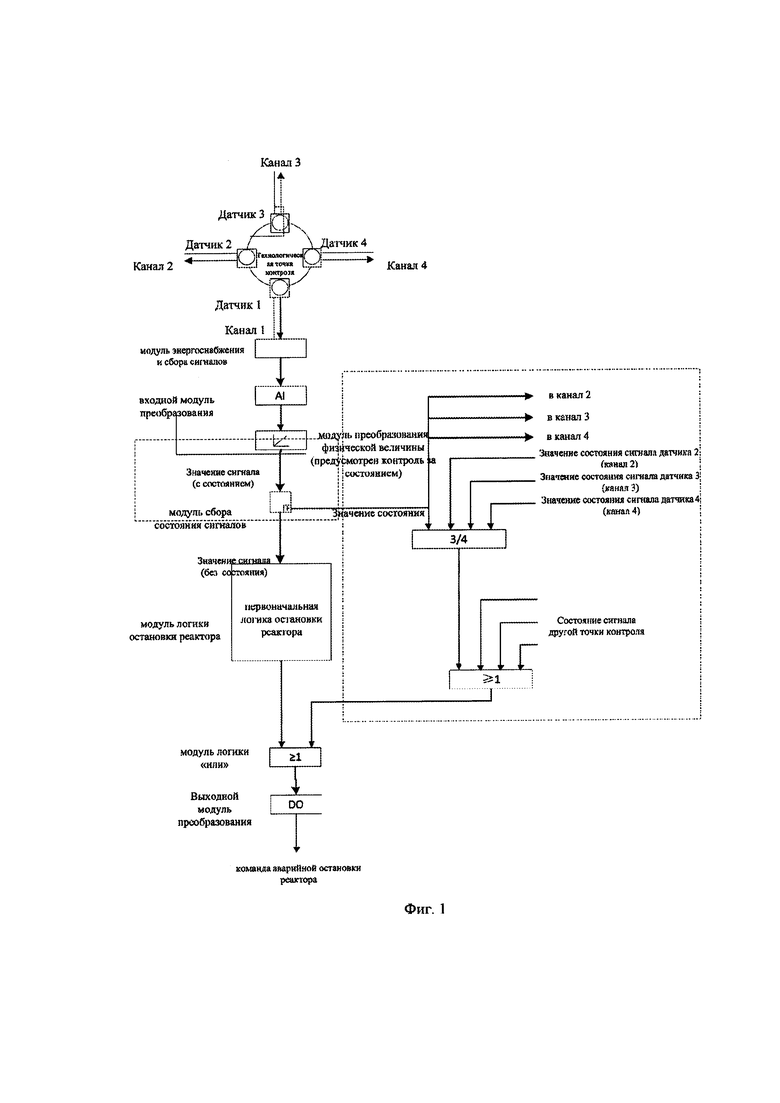
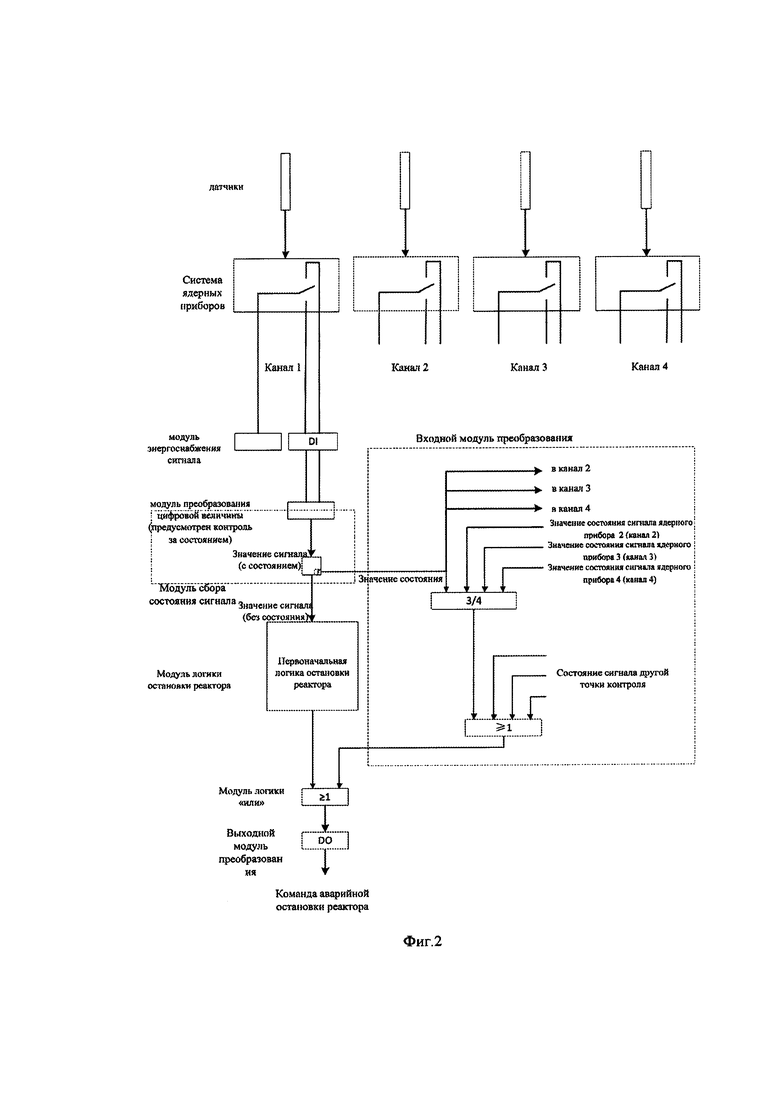
На фигуре 1 показан сбор значений состояния аналоговых сигналов, важных для безопасности АЭС и установка логики остановки реактора, на фиг. 2 - сбор значения состояния дискретных сигналов, важных для безопасности АЭС и установка логики остановки реактора.
Осуществление технического решения.
Настоящее изобретение предназначено для защиты АЭС и описано ниже подробно со ссылками на чертежи.
Способ аварийной остановки реактора на основании состояния сигналов приборов, важных для безопасности АЭС в данном изобретении, включает нижеследующие этапы:
Этап 1: разделение сигналов приборов, важных для безопасности АЭС.
Сигналы приборов, важных для безопасности АЭС разделяют на два типа - аналоговые сигналы и дискретные сигналы. В том числе в обычном случае входной ток аналоговых сигналов составляет 4-20 мА, входное напряжение дискретных сигналов составляет 0 В или 24 В. Эти два типа сигналов преобразуются в цифровые сигналы, считываемые системой вычислительной машины через модуль ввода аналоговых сигналов (AI) и модуль ввода дискретных сигналов (DI) соответственно и входят в систему программного обеспечения для логической обработки и вычисления.
Этап 2: сбор значений состояния аналоговых сигналов, важных для безопасности АЭС.
В аналоговые сигналы, важные для безопасности АЭС включены мощность реактора, напряжение действующих шин, частота действующих шин, перепад давления главного циркуляционного насоса (ГЦНа), мощность ГЦНа, температура первого контура, давление активной зоны (АЗ), уровень компенсатора давления (КД), давление в защитной оболочке (30), уровень жидкости в парогенераторе (ПГ), давление главного паропровода, расход питательной воды парогенератора (ПГ) и т.д.
Как показано на фигуре 1 (не включая пунктирную линию), аналоговые сигналы, важные для безопасности АЭС формируют датчики, расположенные в разных важных для безопасности точках контроля на станции. В каждой точке контроля, как правило, расположены четыре взаимно резервированных датчика. Сигналы четырех датчиков одной точки контроля поступают в четыре резервированных канала системы RTS в виде тока 4-20 мА. RTS представляет собой систему программного и аппаратного обеспечения для аварийной остановки реактора. В каждом канале предусмотрен модуль энергоснабжения и сбора сигналов (аппаратное обеспечение), модуль преобразования входного сигнала (аппаратное обеспечение), модуль преобразования физической величины (программное обеспечение), модуль логики остановки реактора (программное обеспечение), модуль логики «или» (программное обеспечение), модуль преобразования выходного сигнала (аппаратное обеспечение).
Исходный способ аварийной остановки реактора на основании аналоговых сигналов реализуют таким образом, что датчики запитаны от модуля энергоснабжения и сбора сигналов и отрегулированный ток передается в модуль ввода аналоговых сигналов (AI). Модуль AI преобразует собранные значения тока в сигналы, считываемые системой вычислительной машины, и передает в модуль преобразования физической величины программного обеспечения. Модуль преобразования физической величины преобразует машиночитаемые сигналы с признаком значения тока в сигналы физической величины с признаком технологических параметров в точках контроля, таких как значения давления, температуры и расхода и т.д. Эти значения поступают в логический модуль остановки реактора для расчета логики остановки реактора. В случае, когда результат расчета превышает эксплуатационный допустимый предел, немедленно срабатывает сигнал аварийной остановки реактора, который передается в модуль преобразования дискретных сигналов (DO) после логической операции «или». Модуль DO преобразует сигналы вычислительной машины в электрические сигналы и формирует окончательную команду аварийной остановки реактора.
Как показано на фигуре 1 (левая пунктирная рамка) способ реализации сбора значений состояния аналоговых сигналов, предложенный в настоящем изобретении, заключается в том, что предусмотрен контроль состояния сигналов в модуле преобразования физической величины, т.е. добавлена идентификация для выходных сигналов модуля в соответствии с заданными условиями. Когда принятый модулем входной сигнал с признаком значения тока находится в пределах расчетного диапазона (например, для 4-20 мА, допустима погрешность 5%), то выходной сигнал представляет собой преобразованную величину сигнала с характеристикой технологического параметра и состояние сигнала идентифицируется в качестве полезного сигнала. Когда отклонение входного сигнала с признаком значения тока превышает 5% от расчетного диапазона (входное значение тока меньше 3,2 мА или больше 20,8 мА), то значение выходного сигнала задают параметрами верхнего и нижнего пределов, и состояние сигнала идентифицируют в качестве сигнала неисправности. Кроме того, в системное программное обеспечение системы RTS добавлен модуль сбора состояния сигналов. Значение состояния для полезного сигнала составляет «0», а для сигнала неисправности - «1». После этого собранные значения состояния сигналов используют для реализации логики аварийной остановки реактора на основании значений состояния сигналов, как указано выше на этапе 4. При этом передают значение сигналов без идентификации состояния в первоначальный модуль логики остановки реактора.
В соответствии с настоящим изобретением предусмотрен способ сбора значения состояния для аналоговых сигналов, важных для безопасности АЭС. На основе принципа передачи аналоговых сигналов, смоделирована схема контроля за состоянием диапазона значения входного тока с целью идентификации состояния неисправности аналоговых сигналов в таких случаях, как неисправности в пробоотборных линиях, датчиках и линиях, и сбора значений состояния аналоговых сигналов.
Этап 3: сбор значений состояния дискретных сигналов, важных для безопасности АЭС.
В дискретные сигналы, важные для безопасности АЭС, как правило, включены превышение порога цикла реактивности, превышение порога плотности нейтронов, превышение порога линейного энерговыделения топливного стержня ТС, превышение порога запаса до кризиса кипения (DNBR), превышение порога радиоактивности главного паропровода, превышение порога ускорения перемещения в землетрясении, превышение порога напряжения выключателя остановки реактора и т.д.
Как показано на фигуре 2 (не включая пунктирную линию), дискретные сигналы, важные для безопасности АЭС, как правило, получают путем вычисления системой ядерных приборов измерительных сигналов датчиков для показания превышения порога ключевых параметров во время эксплуатации реактора. Вышеупомянутые датчики подразделяются на 4 группы и передают сигналы измерения в четыре резервированные системы ядерных приборов соответственно, по результатам вычисления которых определяется превышение порога ключевых параметров. Сигналы в виде напряжения 0 В или 24 В передаются в четыре резервированных канала системы RTS соответственно.
Способ аварийной остановки реактора на основании дискретных сигналов реализуется таким образом, что инициирующая цепь в системе ядерных приборов запитана от модуля энергоснабжения сигнала (аппаратное обеспечение). При нормальной ситуации в инициирующей цепи предусмотрены две ветки обратной связи - обратная связь нижнего и верхнего уровней. При превышении порога и срабатывании расчетного значения в системе ядерных приборов два сигнала обратной связи меняются местами: входной модуль преобразования дискретных сигналов DI (аппаратное обеспечение) принимает два сигнала обратной связи от системы ядерных приборов и преобразует полученные значения напряжения в считываемые системой вычислительной машины сигналы с последующей передачей их в модуль преобразования цифровой величины (программное обеспечение). Модуль преобразования цифровой величины преобразует считываемые вычислительной машиной сигналы значения напряжения в цифровые сигналы с признаком превышения порога технологических параметров на местах расположения датчиков, в том числе превышение порога цикла реактивности и уровня радиоактивности трубопроводов. Эти цифровые сигналы поступают для расчета в модуль логики остановки реактора. В случае, когда результат расчета превышает эксплуатационный допустимый предел, срабатывает сигнал аварийной остановки реактора, который передается в модуль преобразования дискретных сигналов (DO) после логической операции «или». Модуль DO преобразует сигналы вычислительной машины в электрические сигналы для формирования окончательной команды аварийной остановки реактора.
Осуществление сбора значений состояния дискретных сигналов, предложенное в настоящем изобретении показано на фигуре 2 (левая пунктирная рамка). Предусмотрен контроль состояния сигналов в модуле преобразования цифровой величины, то есть добавлена идентификация для выходных сигналов модуля в соответствии с заданными условиями. Два входных сигнала характеризующих напряжение выходят в качестве цифровой величины после преобразования в случае, если они находятся в расчетных пределах, при этом напряжение одного из них составляет 0 В, а другого - 24 В, при этом состояния сигналов идентифицированы в качестве полезных сигналов. В случае, если два входных сигнала, характеризующих напряжение выходят за расчетные пределы, при этом напряжение двух веток одновременно составляет 0 В или 24 В, то выходное значение сигнала является значением по умолчанию и состояния сигналов идентифицируют в качестве сигналов неисправности. Кроме того, добавлен модуль сбора состояния сигналов в программном обеспечении системы RTS в целях формирования значения состояния сигналов. Значение состояния для полезных сигналов составляет «0», а для сигналов неисправности - «1». Собранные значения состояния сигналов предназначены для реализации новой логики аварийной остановки реактора, см. этап 4. Значение сигналов без идентификации состояния передается в первоначальный модуль логики остановки реактора.
Данный этап обеспечивает способ получения значения состояния для дискретных сигналов, важных для безопасности АЭС. Схема контроля за состоянием значения напряжения переключаемых сигналов выполнена в соответствии с принципом передачи дискретных сигналов. Состояние неисправности дискретного сигнала распознается при таких случаях, как неисправность электропитания, цепи, программного и аппаратного обеспечения системы ядерных приборов и сбора значения состояния дискретных сигналов.
Этап 4: реализация логики аварийной остановки реактора на основании значений состояния сигналов.
Способ реализации логики аварийной остановки реактора на основании значений состояния сигналов в заявленном изобретении приведен на фигурах 1 и 2 (правая пунктирная рамка). Собранные значения состояния сигналов используют для реализации логики аварийной остановки реактора на основании значений состояния сигналов. При этом значения сигналов без идентификации состояния (аналоговый или дискретный сигнал) передаются в первоначальный модуль логики остановки реактора.
Значения состояния четырех сигналов одной точки контроля собирают в целях логического вычисления «3 из 4» (каждый канал соответствует одному сигналу, разные каналы соединяются посредством промышленной сети с целью реализации обмена информацией). Логическое вычисление «2 из 4» осуществляют для соответствующих сигналов реактивности АЗ (превышение порога цикла реактивности, превышение порога плотности нейтронов, мощность реактора). По отношению к измерительным сигналам резервированных технологических систем (например, напряжение действующих шин, частота действующих шин, мощность ГЦНа) осуществляют «2 из 3» для значений состояния сигналов каждой технологической системы с последующим логическим вычислением «3 из 4» для результатов вычисления «2 из 3» каждой технологической системы (например, установлено четыре резервированных технологических системы, при этом каждая технологическая система содержит по три измерительных сигнала).
Если значения нескольких из четырех входных сигналов в одной точке контроля одновременно составляют «1» и превышают заданное в логике значение, то данная точка контроля не надежна. Во избежание снижения категории защитной функции реакторной установки (РУ) АЭС из-за отказа сигналов приборов, сигнал аварийной остановки реактора срабатывает немедленно.
Состояния сигналов каждой точки контроля важной для безопасности выбирают логической операцией «или» после вышеуказанного вычисления с последующим вычислением «или» с первоначальной логической операцией остановки реактора. Тем самым реализуется интегрирование новой и первоначальной логических операций остановки реактора. Сформированные после интегрирования сигналы аварийной остановки реактора преобразуются в электрические сигналы через модуль преобразования дискретных сигналов (DO) и формируется окончательная команда аварийной остановки реактора.
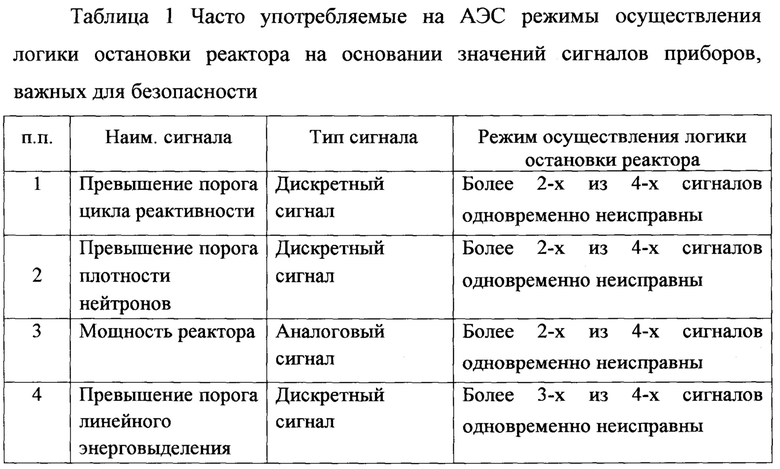
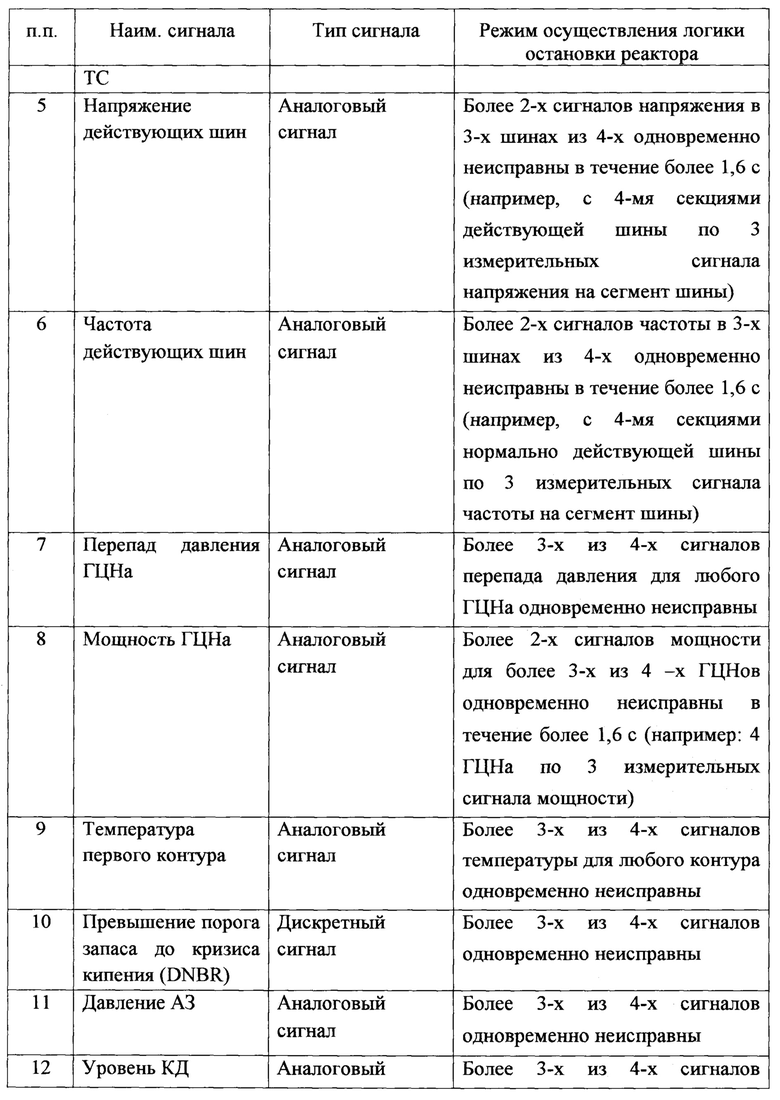
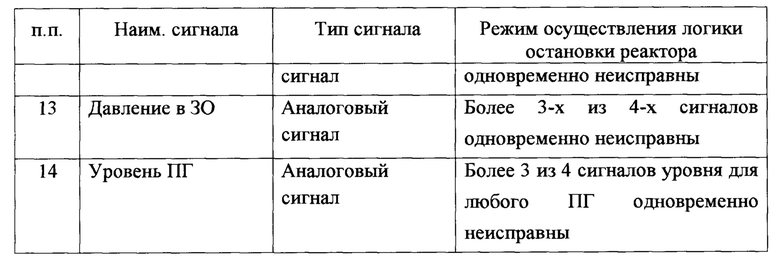
Часто употребляемые на АЭС режимы осуществления логики остановки реактора на основании значений сигналов приборов, важных для безопасности, приведены в таблице 1.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЯЮЩАЯ СИСТЕМА БЕЗОПАСНОСТИ АТОМНОЙ ЭЛЕКТРОСТАНЦИИ | 2015 |
|
RU2598599C1 |
| УПРАВЛЯЮЩАЯ СИСТЕМА БЕЗОПАСНОСТИ АТОМНОЙ ЭЛЕКТРОСТАНЦИИ | 2015 |
|
RU2598649C1 |
| УПРАВЛЯЮЩАЯ СИСТЕМА БЕЗОПАСНОСТИ АТОМНОЙ ЭЛЕКТРОСТАНЦИИ | 2015 |
|
RU2582875C1 |
| СПОСОБ ДЛЯ РАЗДЕЛЕНИЯ РИСКА ОТКАЗА ПАРЫ АВТОМАТИЧЕСКИХ ПРОЦЕССОРОВ ОСНОВНОЙ РСУ | 2020 |
|
RU2734072C1 |
| ПОРОГОВЫЙ БЛОК УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА ИЛИ ТЕХНОЛОГИЧЕСКОГО ОБОРУДОВАНИЯ С ФУНКЦИЕЙ ДИАГНОСТИКИ ВХОДНОГО СИГНАЛА | 2017 |
|
RU2661761C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ФИЗИЧЕСКИХ ПАРАМЕТРОВ ИССЛЕДОВАТЕЛЬСКОЙ ЯДЕРНОЙ УСТАНОВКИ | 2021 |
|
RU2759182C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ОТКАЗОВ В РЕЗЕРВИРОВАННОЙ СИСТЕМЕ | 2011 |
|
RU2487389C2 |
| УПРАВЛЯЮЩАЯ ЦИФРОВАЯ СИСТЕМА БЕЗОПАСНОСТИ АТОМНОЙ ЭЛЕКТРОСТАНЦИИ И СПОСОБ ОБЕСПЕЧЕНИЯ ПАРАМЕТРОВ БЕЗОПАСНОСТИ | 2007 |
|
RU2356111C2 |
| АППАРАТУРА РАДИАЦИОННОГО КОНТРОЛЯ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА (АРКТ) | 2017 |
|
RU2661451C1 |
| БЛОК ОБРАБОТКИ, УПРАВЛЕНИЯ И ОТОБРАЖЕНИЯ ИНФОРМАЦИИ | 2019 |
|
RU2714604C1 |
Изобретение относится к способу аварийной остановки реактора на основании состояния сигналов приборов, важных для безопасности атомной электростанции (АЭС). Способ включает на первом этапе разделение сигналов приборов безопасности АЭС на аналоговые и дискретные, на втором этапе сбор значений аналоговых сигналов, на третьем этапе сбор значений дискретных сигналов, на четвертом этапе осуществляют алгоритм аварийной остановки реактора на основании значений состояния сигналов. Проводится контроль в реальном времени состояния сигналов приборов в точках контроля, важных для безопасности АЭС. При неисправности нескольких сигналов приборов в одной точке контроля остановку реактора автоматически инициируют по количеству сигналов неисправности для предотвращения снижения категории защитной функции реакторной установки (РУ) АЭС из-за отказа сигналов приборов в целях повышения уровня эксплуатационной безопасности АЭС. Техническим результатом является обеспечение аварийной остановки реактора, контроль в реальном времени состояния сигналов приборов в точках контроля, важных для безопасности АЭС, обеспечение автоматической остановки реактора при неисправности нескольких сигналов приборов в одной точке контроля. 4 з.п. ф-лы, 2 ил., 1 табл.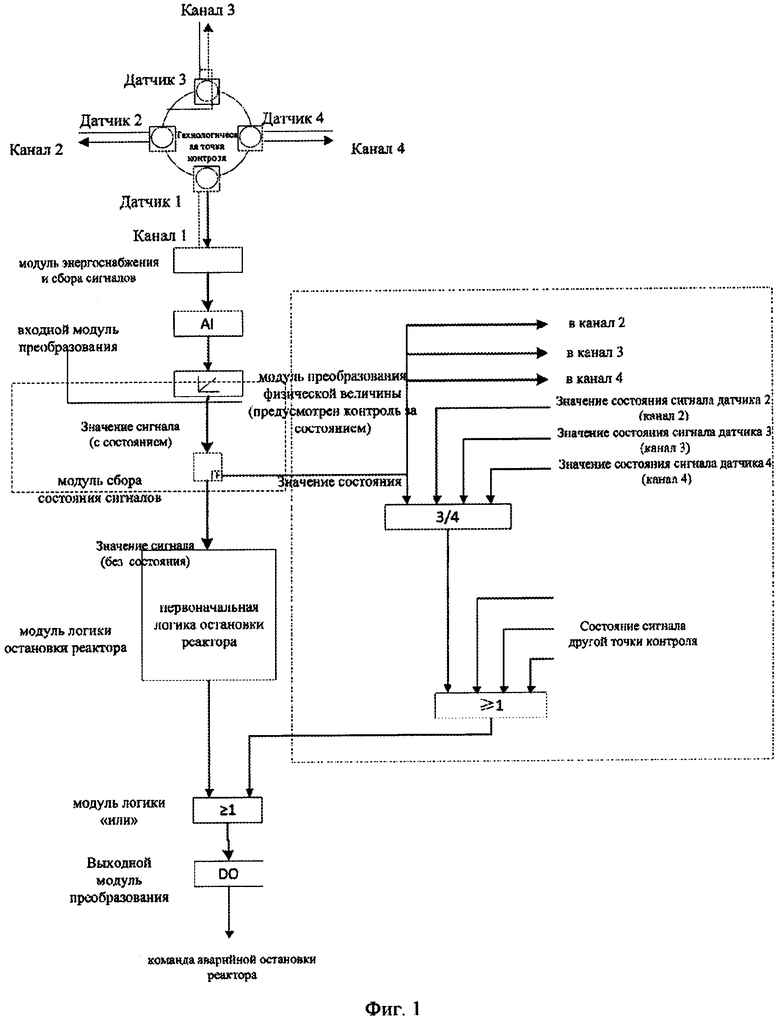
1. Способ аварийной остановки реактора на основании сигналов приборов о показателях, важных для безопасности атомной электростанции (АЭС), характеризующийся тем, что на первом этапе разделяют сигналы приборов безопасности АЭС на аналоговые и дискретные, на втором этапе собирают значения аналоговых сигналов, на третьем этапе собирают значения дискретных сигналов, на четвертом этапе осуществляют алгоритм аварийной остановки реактора на основании значений состояния сигналов, при этом на втором упомянутом этапе осуществляют нижеуказанные действия:
- этап (2.1): аналоговые сигналы формируются датчиками, расположенными в точках контроля станции, при этом в каждой точке контроля располагают четыре взаимно резервированных датчика, причем сигналы четырех датчиков одной точки контроля поступают в четыре резервированных канала системы аварийной остановки реактора (RTS) в виде тока 4 -20 мА;
- этап (2.2): датчики запитывают от модуля энергоснабжения и сбора сигналов, который передает отрегулированный ток в модуль ввода аналоговых сигналов (AI);
- этап (2.3): посредством модуля ввода аналоговых сигналов (AI) преобразуют полученные значения тока в сигналы, считываемые системой вычислительной машины, и передают в модуль преобразования физической величины;
- этап (2.4): посредством модуля преобразования физической величины преобразуют машиночитаемые сигналы с признаком значения тока в сигналы физической величины с признаком технологических параметров в точках контроля, в том числе значения давления, температуры и расхода, которые поступают в логический модуль остановки реактора для расчета логики остановки реактора, результат вычисления, представляющий собой логическую операцию ИЛИ, передают в модуль преобразования дискретных сигналов (DO);
- этап (2.5): осуществляют контроль состояния сигналов в модуле преобразования физической величины, при этом идентифицируют выходные сигналы модуля в соответствии с заданными условиями, при этом допустима погрешность 5% для принятых модулем входных сигналов тока в расчетных пределах 4-20 мА, при этом выходной сигнал в виде сигнала с характеристикой технологического параметра точки контроля преобразуется и идентифицируется в качестве полезного сигнала, при этом если отклонение входного сигнала с признаком значения тока превышает 5% от расчетного диапазона, при этом входное значение тока меньше 3,2 мА или больше 20,8 мА, то значение выходного сигнала задают параметрами верхнего и нижнего пределов, и состояние сигнала идентифицируют в качестве сигнала неисправности;
- этап (2.6): в программном обеспечении системы RTS используют добавленный модуль сбора состояния сигналов, значение состояния для полезных сигналов составляет «0», а для сигналов неисправности - «1»,
при этом на третьем этапе осуществляют нижеуказанные действия:
- этап (3.1): дискретные сигналы получают после того, как посредством системы ядерных приборов рассчитывают измерительные сигналы датчиков для показания превышения порога ключевых параметров во время эксплуатации реактора, при этом датчики подразделяют на четыре группы, при этом измерительные сигналы передают в четыре резервированные системы ядерных приборов соответственно, по результатам вычисления которых определяют превышение порога ключевых параметров, сигналы в виде напряжения 0 В или 24 В передают в четыре резервированных канала системы RTS соответственно;
- этап (3.2): инициирующую цепь в системе ядерных приборов запитывают от модуля энергоснабжения сигнала, в инициирующей цепи используют две ветки обратной связи - обратная связь нижнего и верхнего уровня, при превышении порога и срабатывании расчетного значения в системе ядерных приборов два сигнала обратной связи меняют местами;
- этап (3.3): посредством входного модуля преобразования дискретных сигналов DI получают два сигнала обратной связи от системы ядерных приборов и преобразуют полученные значения напряжения в считываемые системой вычислительной машины сигналы с последующей передачей их в модуль преобразования цифровой величины;
- этап (3.4): посредством модуля преобразования цифровой величины преобразуют считываемые вычислительной машиной сигналы значения напряжения в цифровые сигналы с признаком превышения порога технологических параметров на местах расположения датчиков, в том числе превышение порога цикла реактивности и уровня радиоактивности трубопроводов, эти цифровые сигналы передают для расчета в модуль логики остановки реактора, результат расчета передают в модуль преобразования дискретных сигналов после логической операции ИЛИ;
- этап (3.5): осуществляют контроль состояния сигналов в модуле преобразования цифровой величины, при этом проводят идентификацию для выходных сигналов модуля в соответствии с заданными условиями, два входных сигнала характеризующих напряжение преобразуют в выходящие в качестве цифровой величины после преобразования в случае, если они находятся в расчетных пределах, при этом напряжение одного из них составляет 0 В, а другого - 24 В, при этом состояния сигналов идентифицируют в качестве полезных сигналов, при этом если два входных сигнала, характеризующих напряжение выходят за расчетные пределы, при этом напряжение двух веток одновременно составляет 0 В или 24 В, то выходное значение сигнала используют как значение по умолчанию и состояния сигналов идентифицируют в качестве сигналов неисправности;
- этап (3.6): дополнительно используется модуль сбора состояния сигналов в программном обеспечении системы RTS в целях формирования значения состояния сигналов, при этом значение состояния для полезных сигналов составляет «0», а для сигналов неисправности - «1».
2. Способ по п. 1, характеризующийся тем, что на первом этапе используют входной ток аналоговых сигналов, составляющий 4-20 мА, входное напряжение дискретных сигналов, составляющее 0 или 24 В, напряжение дискретных сигналов, составляющее 0 или 24 В, при этом эти типы сигналов преобразуют в цифровые сигналы, считываемые системой вычислительной машины через модуль ввода аналоговых сигналов и модуль ввода дискретных сигналов соответственно и передают в систему программного обеспечения для логической обработки и вычисления.
3. Способ по п. 1, характеризующийся тем, что на втором этапе в аналоговые сигналы включают мощность реактора, напряжение действующих шин, частоту действующих шин, перепад давления главного циркуляционного насоса (ГЦНа), мощность ГЦНа, температуру первого контура, давление активной зоны (AЗ), уровень компенсатора давления (КД), давление в защитной оболочке (30), уровень жидкости в парогенераторе (ПГ), давление главного паропровода, расход питательной воды парогенератора (ПГ).
4. Способ по п. 1, характеризующийся тем, что на третьем этапе в дискретные сигналы включают превышение порога цикла реактивности, превышение порога плотности нейтронов, превышение порога линейного энерговыделения топливного стержня (ТС), превышение порога запаса до кризиса кипения, превышение порога радиоактивности главного паропровода, превышение порога ускорения перемещения в землетрясении, превышение порога напряжения выключателя остановки реактора.
5. Способ по п. 1, характеризующийся тем, что на упомянутом четвертом этапе осуществляют нижеследующие действия:
- этап (4.1): собранные значения состояния сигналов используют для реализации логической операции аварийной остановки реактора на основании значений состояния сигналов, при этом значение сигналов без идентификации состояния передают в первоначальный модуль логической операции остановки реактора;
- этап (4.2): значения состояния четырех сигналов одной точки контроля собирают в целях логического вычисления операции «3 из 4», при этом логическое вычисление «2 из 4» осуществляют для соответствующих сигналов реактивности активной зоны (АЗ), при этом по отношению к измерительным сигналам резервированных технологических систем осуществляют «2 из 3» для значений состояния сигналов каждой технологической системы с последующим логическим вычислением «3 из 4» для результатов вычисления «2 из 3» каждой технологической системы;
- этап (4.3): если несколько из четырех входных сигналов в одной точке контроля одновременно составляют «1» и превышают заданное значение, то данную точку контроля определяют как ненадежную, во избежание снижения категории защитной функции реакторной установки (РУ) АЭС из-за отказа сигналов приборов, обеспечивают немедленное срабатывание сигнала аварийной остановки реактора;
- этап (4.4): состояния сигналов каждой точки контроля выбирают логической операцией ИЛИ после вычисления, предусмотренного на этапах 4.1-4.3, с последующим вычислением ИЛИ первоначальной логической операции остановки реактора, тем самым реализуют интегрирование новой и первоначальной логических операций остановки реактора, при этом сформированные после интегрирования сигналы аварийной остановки реактора преобразуют в электрические сигналы через модуль преобразования дискретных сигналов и формируют окончательную команду аварийной остановки реактора.
| УПРАВЛЯЮЩАЯ СИСТЕМА БЕЗОПАСНОСТИ АТОМНОЙ ЭЛЕКТРОСТАНЦИИ | 2015 |
|
RU2598649C1 |
| УПРАВЛЯЮЩАЯ ЦИФРОВАЯ СИСТЕМА БЕЗОПАСНОСТИ АТОМНОЙ ЭЛЕКТРОСТАНЦИИ И СПОСОБ ОБЕСПЕЧЕНИЯ ПАРАМЕТРОВ БЕЗОПАСНОСТИ | 2007 |
|
RU2356111C2 |
| СПОСОБ СБОРА И ОБРАБОТКИ СИГНАЛОВ В СИСТЕМЕ КОНТРОЛЯ АКТИВНОЙ ЗОНЫ ЯДЕРНОГО РЕАКТОРА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2150756C1 |
| EP 3659158 A1, 03.06.2020 | |||
| EP 3274997 A4, 21.11.2018 | |||
| WO 2018165353 A2, 13.09.2018 | |||
| US 9099207 B2, 04.08.2015. | |||

