Изобретение относится к способам передачи данных и системам для их осуществления, а более точно - к способам и системам сбора и обработки сигналов в системе внутриреакторного контроля активной зоны ядерного реактора. При контроле активных зон реакторных установок к элементам систем контроля предъявляются высокие требования к их надежности.
Одним из способов повышения надежности системы, важных для безопасности, является введение избыточности входящих в нее компонентов. Использование избыточных компонентов возможно на всех этапах сбора и обработки данных. Обязательными компонентами таких систем являются размещенные в активной зоне реактора датчики, устройства сбора данных, в том числе каналы связи и средства обработки полученных от датчиков сигналов.
Введем некоторые определения понятий, которые используются в данном описании.
Датчик - устройство, преобразующее один или несколько параметров сложного технологического процесса в аналоговый электрический сигнал.
Канал - соединение между устройствами, через которое информация может быть передана от одного устройства к другому, обеспечивающее передачу сигналов из зоны установки датчиков в вычислительное устройство, осуществляющее предварительную обработку данных. Канал может состоять из одного или нескольких параллельных путей.
Путь - это, в общем случае, многопроводное электрическое соединение, которое включает в себя такие компоненты, как усилители, преобразователи сигналов, системные магистрали.
Системные магистрали - это линии связи и связанные с ними средства управления. Системные магистрали содержат средства передачи адреса, команд и данных. Примерами системной магистрали могут служить хорошо известные в области вычислительной техники шины IEEE488, QBUS, MULTIBUS и др.
Способ передачи данных с частичной избыточностью, в котором используются два параллельных шинных пути прохождения сигналов, описан в патенте США N 4490785. В этом патенте предложена распределенная компьютерная сеть с узлами, соединенными попарно каналами из множества путей (например, двух путей). Для каждого пути в каждом узле имеются свой линейный усилитель и приемник, а единый набор компонентов (т.е. логических схем передачи и приема) используется на основе разделения между двумя путями. Оба пути используются попеременно с присваиванием функций на случайной равновероятной основе. Если случится информационный сбой или на данном пути обнаружится повреждение, из шинного интерфейса производится переключение действующего пути. В описанном решении в каждый данный момент работает один шинный путь, а другой находится в "горячем" резерве. Повреждения легко обнаруживаются, а не пребывают в скрытом виде благодаря попеременному использованию путей, что в какой-то степени гарантирует обнаружение неисправности канала. Однако такая система требует наличия двух датчиков, поскольку один датчик, например токовый, подключать к двум параллельным путям (для "горячего" резервирования) нельзя - существенно уменьшится величина сигнала, значительно снизится точность измерения. Кроме того, эта система работает благодаря использованию на обоих концах шин компьютерного оборудования, обеспечивающего анализ переданных сообщений.
Недостатками такой системы являются потребность в двойном количестве датчиков и ее сложность. Установка дорогого компьютерного оборудования на той части пути, которая размещена вблизи датчиков в активной зоне реактора, была бы экономически нецелесообразна.
Другим известным способом повышения доступности и надежности системы передачи данных является передача данных по частично дублированной схеме, описанная в патенте США N 4974144, где периферийное устройство (датчик) соединяется с контроллером ввода/вывода с помощью первого и второго идентичных дублирующих путей входа/выхода. Интерфейс получает одновременные синхронизированные сигналы, которые передает далее в центральное процессорное устройство для обработки. Недостатком такой системы передачи является трудность определения места возникновения неисправности и момента происходящих в системе нежелательных изменений параметров, с которого нужно предпринимать меры по восстановлению ее работоспособности.
В патенте США N 4668465 (этот патент выбран в качестве прототипа), описывающем способ и устройство для дистанционного мониторинга процессов в объеме активной зоны ядерного реактора, сигналы с датчиков, отражающие положение управляющих стержней, поступают во входные устройства измерительного канала, содержащего передающую часть и два параллельных шинных пути, соединяющих датчики с приемной частью канала, соединенной с двумя промежуточными процессорами. Передающая часть канала содержит входные устройства, соединенные с датчиками. Каждый путь содержит средства генерации множества цифровых сигналов, средства запоминания указанного множества цифровых сигналов и системные магистрали, имеющие средства для передачи данных, команд и адресов. От одного из промежуточных процессоров обработанные данные поступают на компьютер установки, являющийся вычислительным устройством более высокого уровня, а от второго обработанные данные подаются на дисплей, где отображаются в виде гистограмм на многостраничном дисплее. Оба пути работают одновременно и независимо, расхождение результатов является сигналом для проверки шинных путей. Главным преимуществом данного решения является полная идентичность путей после разветвления сигнала, их независимость друг от друга, что обеспечивает высокую достоверность полученных в результате отображений процесса.
Однако промежуточные процессоры работают по разным программам, нет механизма изменения управления режимом работы входного устройства с целью, например, проверки датчиков и путей или изменения каких-либо параметров входного устройства, например коэффициента усиления.
В систему внутриреакторного контроля входит совокупность различных внутризонных датчиков, а также ряд технологических датчиков, обеспечивающих контроль состояния основного технологического оборудования реакторной установки (РУ). Сигналы различных датчиков по разному влияют на показатели надежности выполнения функций системы в целом. Так, например, надежность получения ряда расчетных параметров, входящих в так называемую таблицу допустимых значений параметров РУ, должна быть обеспечена резервированием измерительных функций. Однако это резервирование может иметь следующие ограничения: 1) не всегда существует возможность подключения двух измерительных каналов к одному датчику (как, например, к упомянутому выше датчику, имеющему на выходе токовый сигнал); 2) не всегда существует возможность установки "лишнего" датчика; 3) увеличение числа входных устройств приводит к резкому росту единиц оборудования.
Таким образом, для надежного выполнения аппаратной функции внутриреакторного контроля требуется избыточное резервирование путей приема, обработки и передачи сигналов от датчиков и неизбежно появляется необходимость в общем для N путей (где N , например, равно двум) устройстве приема сигнала от датчика. Кроме того, для обеспечения контроля состояния (например, исправности) датчиков, подтверждения метрологических характеристик необходима систематическая проверка состояния путей и датчиков, связанная с периодическими изменениями параметров или режима работы входных устройств, при этом должна сохраняться независимость одного пути от второго, а также полная идентичность используемого аппаратного оборудования и программного обеспечения обоих путей. Необходимость проверки состояния путей и изменения параметров входных устройств требуют передачи управления передающей частью канала от одного пути к другому.
Основной технической задачей, решаемой данным изобретением, является обеспечение способа и системы сбора и обработки сигналов с высокой степенью надежности и доступности за счет применения двух (или более) параллельных путей, соединяющих датчик с двумя (или более) одинаковыми компьютерами. Другой технической задачей при применении двух параллельных путей является разрешение конфликтов, возникающих при управлении входным устройством, соединенным с датчиком, со стороны двух одновременно и независимо друг от друга работающих по одинаковым программам компьютеров.
Для целого ряда измерительных каналов системы внутриреакторного контроля характерна необходимость управления режимом работы или параметрами входного устройства. Как правило, это связано с необходимостью изменения коэффициента передачи в канале, контролем состояния линий связи с датчиком, включением/выключением режимов теста входного устройства и т.д. Любое изменение режима работы входного устройства или изменение его параметров приводит к изменению значения сигнала в приемной части обоих путей. Решение о выполнении какой-либо управляющей функции может быть принято одним процессором, независимо от работы другого процессора. О состоянии передающего оборудования должен иметь возможность узнать по другому пути другой процессор, в данный момент не управляющий изменением режима. Результатом этого может стать столкновение воздействий на общую часть канала со стороны первого и второго процессоров. Еще одним осложнением может стать появление неисправности в том пути, по которому процессор произвел переключение режима работы входного устройства, что может привести к "зависанию" канала в этом состоянии. Предлагаемое изобретение позволяет разрешать возникающие в таких ситуациях конфликты.
Сущность предлагаемого способа заключается в том, что при передаче сигналов в системе контроля активной зоны ядерного реактора внутри замкнутой структуры по измерительному каналу от датчика к процессорам, размещенным за пределами этой структуры,
- вырабатывают внутри замкнутой структуры информационный сигнал, представляющий значение измерения выбранного параметра процесса,
- преобразуют указанный информационный сигнал в множество избыточных цифровых сигналов, содержащее по крайней мере два избыточных цифровых сигнала,
- запоминают указанное множество избыточных цифровых сигналов,
- считывают указанное множество избыточных цифровых сигналов по указанному измерительному каналу, содержащему передающую часть и по крайней мере два дублирующих друг друга пути передачи данных, по первому из указанных путей - первым процессором и по второму из указанных путей - вторым процессором,
- вырабатывают в одном из процессоров из каждого избыточного цифрового сигнала, полученного по соединенному с данным процессором одному из указанных путей передачи данных, первое представление указанного выбранного параметра процесса,
- выработанное представление передают в вычислительное устройство более высокого уровня,
- (далее следуют отличительные признаки предлагаемого способа),
- вырабатывают во втором процессоре одновременно и по одинаковым с первым указанным процессором программам из каждого избыточного цифрового сигнала, полученного по соединенному со вторым процессором другому из указанных путей передачи данных, второе представление указанного выбранного параметра процесса, идентичное первому,
- выработанное второе представление передают в указанное вычислительное устройство более высокого уровня, и
- при возникновении необходимости изменения режима работы входного устройства измерительного канала по одному из дублирующих путей, например первому, устанавливают и запоминают в передающей части измерительного канала слово состояния первого пути, соответствующее указанным изменениям,
- устанавливают в передающей части измерительного канала состояние измененного режима,
- производят необходимые изменения режима передающей части измерительного канала,
- контролируют состояние режима работы передающей части измерительного канала по первому пути первым процессором, а по второму пути - вторым процессором,
- контролируют в передающей части измерительного канала появление разрешенных и неразрешенных командных слов, передаваемых по первому пути первым процессором,
- при обнаружении неразрешенных командных слов, передаваемых первым процессором, или при превышении паузы между соседними разрешенными командными словами, передаваемыми первым процессором, заданного временного интервала в передающей части измерительного канала запрещают управление изменением режима работы измерительного канала по первому пути и устанавливают флажок сбоя первого пути,
- производят проверку установки указанного флажка сбоя первого пути вторым процессором по второму пути,
- при необходимости дополнительного изменения режима работы измерительного канала, возникшей во втором процессоре и установленном флажке сбоя первого пути, устанавливают и запоминают в передающей части измерительного канала слово состояния второго пути, соответствующее указанным необходимым изменениям,
- устанавливают в устройстве изменения режима работы входного устройства измерительного канала в передающей части измерительного канала состояние измененного режима,
- производят необходимые изменения режима работы измерительного канала,
- контролируют состояние режима работы измерительного канала по первому пути первым процессором, а по второму пути вторым процессором,
- при обнаружении в передающей части измерительного канала разрешенного командного слова по первому пути сбрасывают флажок сбоя первого пути.
Сущность системы для осуществления указанного выше способа заключается в том, что она содержит
- датчик, имеющий по крайней мере один выход,
- первый и второй процессоры,
- вычислительное устройство более высокого уровня, соединенное с указанными первым и вторым процессорами,
- причем измерительный канал имеет
- передающую часть и
- первый и второй дублирующие друг друга пути,
- причем передающая часть содержит входное устройство по крайней мере с одним информационным входом и выходом,
- а каждый путь содержит средство генерации множества цифровых сигналов,
- средство запоминания множества цифровых сигналов и
- системную магистраль,
- причем каждая системная магистраль соединяет передающую часть измерительного канала с соответствующим процессором,
- указанный выход датчика соединен с информационным входом входного устройства,
- выход входного устройства соединен с входами средств генерации множества цифровых сигналов,
- выход каждого средства генерации множества цифровых сигналов соединен с входом средства запоминания множества цифровых сигналов соответствующего пути,
- выход каждого средства запоминания множества цифровых сигналов соединен с соответствующей системной магистралью,
(далее следуют отличительные признаки) передающая часть измерительного канала содержит:
- общее для обоих путей средство изменения режима работы входного устройства по крайней мере с двумя входами управления, двумя входами запрета и по крайней мере одним выходом,
- общий для обоих путей регистр режима работы с входом и выходом,
- а каждый путь содержит устройство контроля появления разрешенных и неразрешенных командных слов с входом и выходом и
- средство для запоминания слова состояния соответствующего пути, содержащее ячейку для фиксации состояния сбоя данного пути,
причем входное устройство имеет по крайней мере один вход изменения режима работы,
- средство для запоминания слова состояния соответствующего пути имеет вход и выход
- ячейка для фиксации состояния сбоя данного пути имеет вход и выход,
- вход устройства контроля соединен с системной магистралью соответствующего пути,
- выход устройства контроля соединен с соответствующим входом запрета средства изменения режима работы входного устройства и входом ячейки для фиксации состояния сбоя данного пути,
- выход каждой ячейки для фиксации состояния сбоя соединен с системными магистралями обоих путей,
- вход средства для запоминания слова состояния данного пути соединен с соответствующей системной магистралью,
- выход средства для запоминания слова состояния данного пути соединен с соответствующим входом управления средства изменения режима работы входного устройства,
- выход средства изменения режима работы соединен с входом изменения режима работы входного устройства и входом регистра режима работы, а
- выход регистра режима работы соединен с обеими системными магистралями.
В другом варианте-системы:
- указанный датчик имеет второй выход,
- указанное входное устройство имеет второй информационный вход и второй вход изменения режима работы,
- указанное средство изменения режима работы входного устройства имеет второй выход,
- причем указанный второй выход датчика соединен с указанным вторым информационным входом входного устройства, а указанный второй вход изменения режима работы входного устройства соединен с указанным вторым выходом средства изменения режима работы входного устройства.
Предлагаемые способ и система для его осуществления поясняются следующими фигурами.
На фиг. 1 показаны система сбора и обработки сигналов в системе контроля активной зоны ядерного реактора, датчик и вычислительное устройство более высокого уровня.
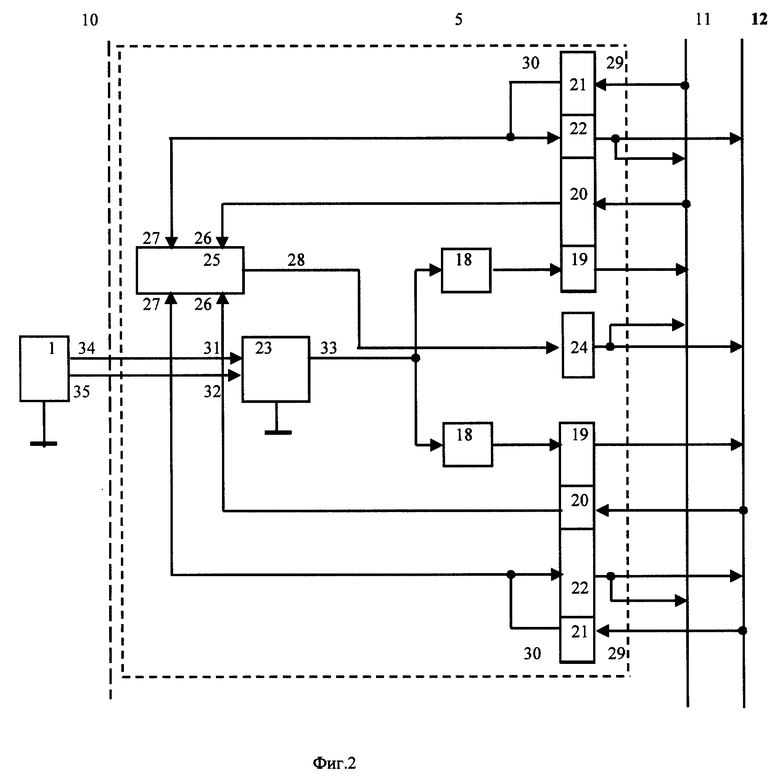
На фиг. 2 показана передающая часть канала.
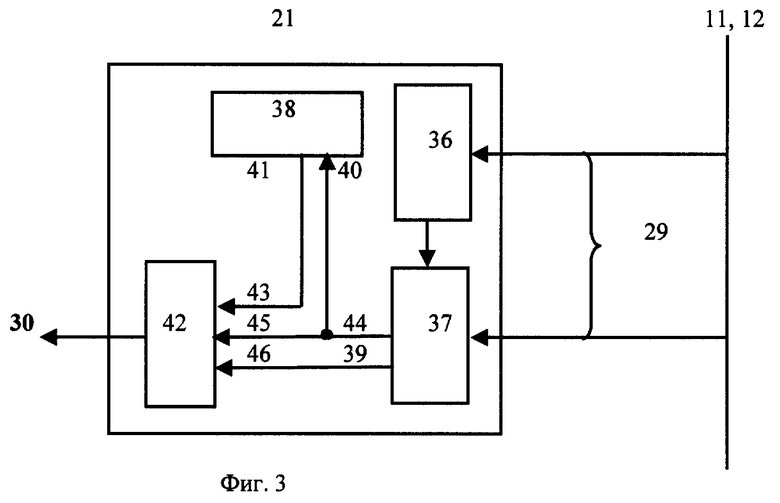
На фиг. 3 показано устройство контроля появления разрешенных и неразрешенных командных слов.
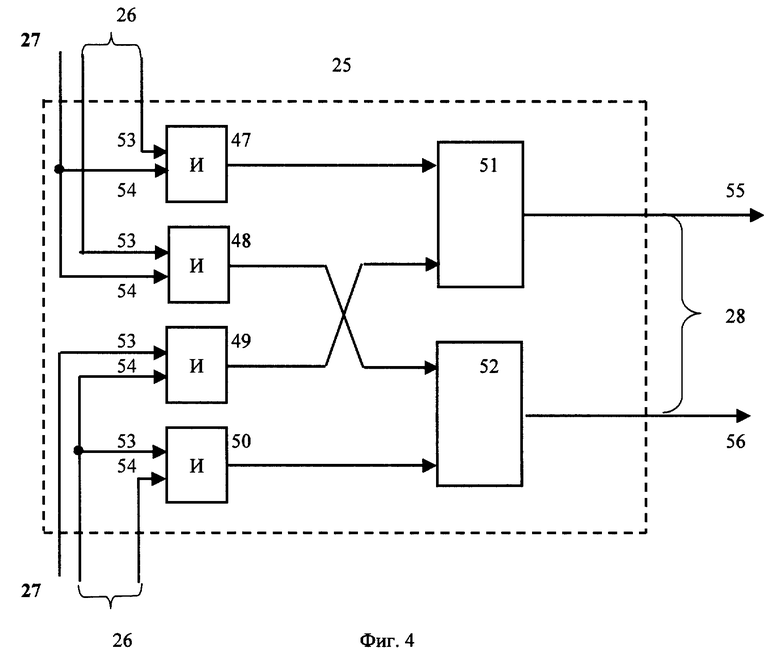
На фиг. 4 показано устройство изменения режима работы входного устройства.
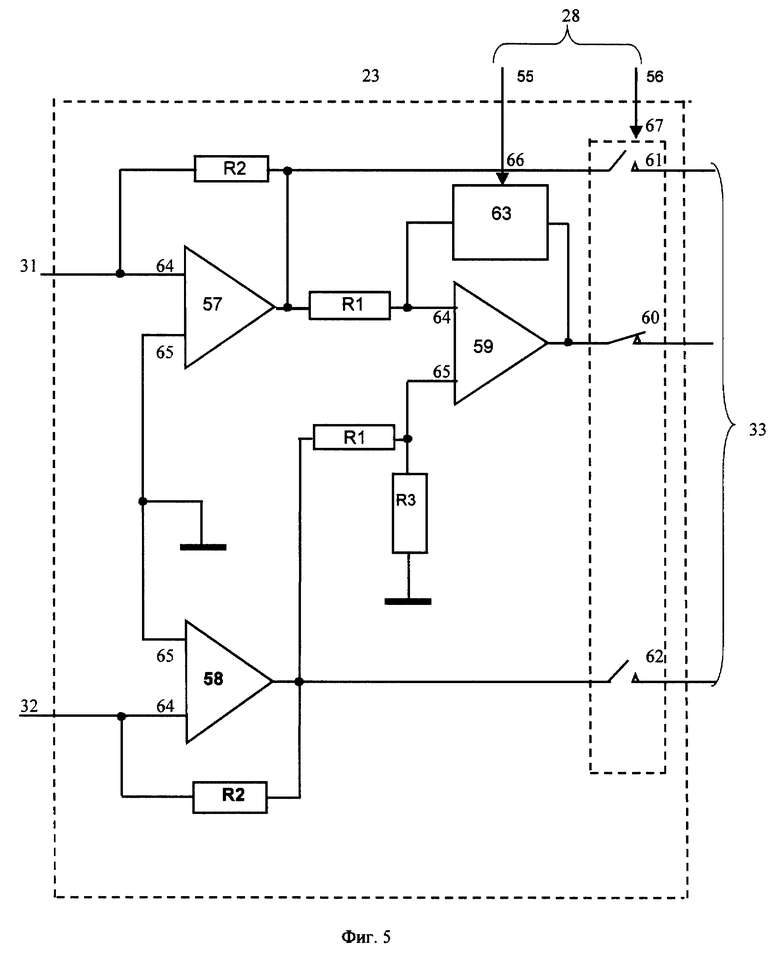
На фиг. 5 показано входное устройство.
Перечень обозначений:
1 - датчик;
2 - измерительный канал;
3 - первый путь измерительного канала;
4 - второй путь измерительного канала;
5 - передающая часть измерительного канала;
6 - первый процессор;
7 - второй процессор;
8 - вычислительное устройство более высокого уровня;
9 - граница замкнутой структуры;
10 - информационный канал связи первого и второго процессоров с вычислительным устройством более высокого уровня;
11 - системная магистраль первого пути измерительного канала;
12 - системная магистраль второго пути измерительного канала;
13 - первый вход/выход первого процессора;
14 - первый вход/выход второго процессора;
15 - второй вход/выход первого процессора;
16 - второй вход/выход второго процессора;
17 - вход/выход вычислительного устройства более высокого уровня;
18 - средство генерации множества цифровых сигналов;
19 - средство запоминания указанного множества цифровых сигналов;
20 - средство для запоминания слова состояния соответствующего пути;
21 - устройство контроля появления разрешенных и неразрешенных командных слов;
22 - ячейка для фиксации состояния сбоя данного пути;
23 - входное устройство;
24 - регистр режима работы;
25 - средство изменения режима работы входного устройства;
26 - вход управления средства изменения режима работы;
27- вход запрета средства изменения режима работы;
28 - выход средства изменения режима работы;
29 - вход устройства контроля появления разрешенных и неразрешенных командных слов;
30 - выход устройства контроля появления разрешенных и неразрешенных командных слов;
31 - первый информационный вход входного устройства;
32 - второй информационный вход входного устройства;
33 - выход входного устройства;
34 - первый выход датчика;
35 - второй выход датчика;
36 - устройство распознавания адреса;
37 - устройство распознавания команды;
38 - таймер;
39 - выход сигнала "появление правильной команды";
40 - вход сброса таймера;
41 - выход таймера:
42 - средство фиксации появления неправильной команды;
43 - первый вход установки средства фиксации;
44 - выход сигнала "появление неправильной команды";
45 - вход сброса средства фиксации;
46 - второй вход установки средства фиксации;
47 - первая схема, реализующая логическую функцию "И";
48 - вторая схема, реализующая логическую функцию "И";
49 - третья схема, реализующая логическую функцию "И";
50 - четвертая схема, реализующая логическую функцию "И";
51 - устройство управления усилением входного устройства;
52 - устройство управления видом подключения датчика;
53 - первый вход схемы, реализующей логическую функцию "И";
54 - второй вход схемы, реализующей логическую функцию "И";
55 - выход изменения усиления входного устройства;
56 - выход изменения вида подключения датчика;
57 - первый операционный усилитель;
58 - второй операционный усилитель;
59 - третий операционный усилитель;
60 - первый контакт устройства управления видом подключения датчика;
61 - второй контакт устройства управления видом подключения датчика;
62 - третий контакт устройства управления видом подключения датчика;
63 - узел регулируемой обратной связи;
64 - первый вход операционного усилителя;
65 - второй вход операционного усилителя;
66 - вход управления усилением входного устройства;
67 - вход управления видом подключения датчика;
R1, R2, R3 - омические сопротивления (переходные, обратной связи и смещения).
На фиг. 1 показаны датчик 1, канал 2 системы сбора и обработки сигналов и вычислительное устройство более высокого уровня 8. В качестве датчика 1 могут быть применены, например, β-эмиссионный детектор, ионизационная камера, термометр сопротивления или термопара. Канал 2 содержит передающую часть 5 и первый 3 и второй 4 дублирующие друг друга пути. Первый путь 3 содержит системную магистраль 11, содержащую средства передачи команд, адресов и данных (последние на фиг. не показаны). Второй путь 4 содержит системную магистраль 12, содержащую средства передачи команд, адресов и данных (последние на фиг. не показаны).
Системная магистраль 11 первого пути 3 соединена с первым входом/выходом 13 первого процессора 6, системная магистраль 12 второго пути 4 соединена с первым входом/выходом 14 второго процессора 7. Вторые входы/выходы 15 и 16 процессоров 6 и 7 соединены с входом/выходом 17 вычислительного устройства более высокого уровня 8 информационным каналом связи 10. Датчик 1 находится внутри замкнутой структуры в объеме активной зоны реактора. Он имеет по крайней мере три вывода, один из которых соединен с землей, а два других вывода по проводам соединены с передающей частью 5 канала 2, отделенной от датчика 1 границей 9 замкнутой структуры.
На фиг. 2 более детально показана передающая часть 5 канала 2. Два вывода (34 и 35) датчика 1 соединены с информационными входами 31 и 32 входного устройства 23, выход которого 33 соединен с входами средств генерации множества цифровых сигналов 18, которые могут быть, например, аналого-цифровыми преобразователями (АЦП), первого 3 и второго 4 путей канала 2. Выходы АЦП 18 каждого пути соединены со входами средств запоминания множества цифровых сигналов 19, которые могут быть выполнены в виде регистров (и в дальнейшем будут называться регистрами данных), выходы которых соединены со средствами для передачи данных (на фиг. не показаны) системных магистралей (11 или 12) соответствующих путей. Кроме того, для каждого пути имеется средство 20 для запоминания слова состояния соответствующего пути, средство 20 может быть выполнено в виде регистра (и в дальнейшем будет называться регистром состояния), вход которого подсоединен к средству для передачи данных (на фиг. не показано) системной магистрали (11 или 12) соответствующего пути, а выход - к соответствующему входу 26 управления средства изменения режима работы 25 входного устройства 23. Для каждого пути имеется устройство контроля появления разрешенных и неразрешенных командных слов 21, вход которого 29 соединен со средствами для передачи команд и адресов (на фиг. не показаны) системных магистралей (11 или 12) соответствующего пути, а выход 30 - с соответствующим входом 27 запрета средства 25 изменения режима работы входного устройства и входом ячейки 22 для фиксации состояния сбоя данного пути. (Эта ячейка может быть выполнена в виде триггера и в дальнейшем будет называться триггером сбоя). Выход триггера сбоя 22 соединен со средствами для передачи данных (на фиг. не показаны) системных магистралей 11 и 12 обоих путей 3 и 4. Следует отметить, что триггер сбоя 22 данного пути может быть выполнен как в виде части регистра состояния 20, так и в виде отдельного триггера.
На фиг. 3 показан вариант устройства 21 контроля появления разрешенных и неразрешенных командных слов. Вход 29 устройства 21 контроля появления разрешенных и неразрешенных командных слов соединен со средством для передачи адресов и средством для передачи команд (на фиг. не показаны) системной магистрали 11 (или 12) соответствующего пути. Вход устройства распознавания адреса 36 соединен с указанным средством для передачи адресов (на фиг. не показано). Первый вход устройства распознавания команды 37 соединен с указанным средством для передачи команд (на фиг. не показано) системной магистрали 11 (или 12) соответствующего пути. Выход устройства распознавания адреса 36 соединен с вторым входом устройства распознавания команды 37. Выход 44 сигнала "появление правильной команды" устройства распознавания команды 37 соединен с входом 40 сброса таймера 38. Кроме того, выход 44 соединен с входом 45 сброса средства 42 фиксации появления неправильной команды. Выход 39 сигнала "появление правильной команды" устройства распознавания команды 37 соединен с вторым входом 46 установки средства фиксации 42. Выход 30 средства 42 фиксации появления неправильной команды является выходом устройства 21 контроля появления разрешенных и неразрешенных командных слов.
На фиг. 4 показан вариант средства 25 изменения режима работы входного устройства. Входы управления 26 и входы запрета 27 средства изменения режима работы входного устройства разделены на две группы. Первая из них (например, состоящая из входов в верхней части фиг. 4) относится к пути 3, а вторая (например, состоящая из входов в нижней части фиг. 4) - к пути 4. Группы идентичны. Вход управления 26 первой группы соединен с первыми входами 53 схем, реализующих логическую функцию "И" (далее просто схем "И") 47 и 48, вход управления 26 второй группы соединен с первыми входами 53 схем, реализующих логическую функцию "И" (далее просто схем "И") 49 и 50. Количество схем "И", относящихся к данной группе, определяется числом вариантов изменения режима работы входного устройства (в рассматриваемом варианте их 2, но их может быть и больше). Ко вторым входам схем "И" 47 и 48, относящихся к данной группе, подсоединен вход 27 управления средства изменения режима работы. Аналогично, во второй группе ко вторым входам схем "И" 49 и 50 подсоединен вход 27 управления средства изменения режима работы второй группы. Выходы схем "И" обеих групп соединены с входами схем 51 и 52 так, что выходы схем "И" 47 и 49 подсоединены ко входам схемы 51, а выходы схем "И" 48 и 50 подсоединены ко входам схемы 52. Схема 51 представляет собой устройство управления усилением входного устройства, схема 52 представляет собой устройство управления видом подключения датчика. Количество схем устройств управления (в данном примере это схемы 51, 52) также равно числу вариантов изменения режима работы входного устройства 23. Выходы 55 и 56 (схем 51 и 52, соответственно) образуют выход 28 средства изменения режима работы 25.
На фиг. 5 показан вариант входного устройства 23 (при использовании в качестве датчика β-эмиссионного детектора). Информационные входы 31 (например, от выхода эмиттера датчика) и 32 (например, от выхода фона датчика) соединены с первыми входами 64 первого и второго операционных усилителей 57 и 58. Вторые входы 65 операционных усилителей 57 и 58 подсоединены к земле. Контакты 60,61 и 62 принадлежат устройству 52 управления видом подключения датчика и им управляются. Они показаны условно, т.к. реально это контакты электронных переключателей. Выходы операционных усилителей 57 и 58 подсоединены (через сопротивления R1) соответственно к входам 64 и 65 третьего операционного усилителя 59. Кроме того, выход операционного усилителя 57 через сопротивление обратной связи R2 соединен с его входом 64 и через указанный контакт 61 - с выходом 33 входного устройства 23. Аналогично, выход операционного усилителя 58 через сопротивление обратной связи R2 соединен с его входом 64, и через указанный контакт 62 - с выходом 33 входного устройства 23. Вход 65 операционного усилителя 59 через сопротивление R3 соединен с землей. Выход операционного усилителя 59 через контакт 60 устройства 52 управления видом подключения датчика соединен с выходом 33 входного устройства 23. Кроме того, выход операционного усилителя 59 через узел 63 регулируемой обратной связи соединен с его входом 64. Вход управления усилением 66 входного устройства соединен с узлом 63 регулируемой обратной связи, а также соединен с выходом 55 изменения усиления входного устройства. Вход управления видом подключения датчика 67 соединен с выходом 56 изменения вида подключения датчика.
Работа системы сбора и обработки сигналов
При работе системы в основном измерительном режиме аналоговые сигналы с датчика 1 (фиг. 1), соответствующие значениям выбранного параметра работы ядерного реактора, поступают в передающую часть 5 канала 2, где формируются два избыточных цифровых сигнала, которые по системным магистралям 11 и 12 первого 3 и второго 4 путей поступают в первый 6 и второй 7 процессоры. Здесь они обрабатываются по совершенно идентичным программам и результаты их обработки по информационному каналу связи 10 поступают в вычислительное устройство 8 более высокого уровня. Аналоговые сигналы с выходов 34 и 35 датчика 1 (фиг. 2) поступают на информационные входы 31 и 32 входного устройства 23, с выхода 33 которого они попадают на два аналого-цифровых преобразователя 18 соответствующих путей 3 и 4, где они преобразуются в избыточные дублирующие друг друга цифровые сигналы. Эти сигналы попадают в регистры данных 19 соответствующих путей. С выходов регистров данных 19 по системной магистрали 11 (или 12) эти данные считываются соответствующим процессором. По этим же системным магистралям оба процессора управляют средством 25 изменения режима работы. Для этого в каждом из путей 3 и 4 имеется регистр состояния 20, который запоминает слово состояния, переданное по соответствующей магистрали 11 (или 12) соединенным с нею процессором 6 (или 7). Это слово состояния поступает на вход управления 27 средства 25 изменения режима работы. На вход 29 устройства 21 контроля появления разрешенных и неразрешенных командных слов с соответствующей магистрали 11 или 12 поступают из процессора командные слова и адреса. Когда по адресу, закрепленному за данным датчиком 1, приходит неразрешенная команда или более заданного промежутка задерживается приход очередной разрешенной команды, сигнал с выхода 30 устройства контроля 21 появления разрешенных и неразрешенных командных слов поступает на вход запрета 26 средства 25 изменения режима работы входного устройства, запрещая воздействие слова состояния по входу управления 27 на средство 25 изменения режима работы входного устройства. Сигнал с выхода 30 устройства контроля 21 поступает также на вход триггера сбоя 22 данного пути и устанавливает его в единицу. Выход триггера сбоя 22 соединен с обеими системными магистралями 11 и 12, поэтому его состояние доступно для опроса обоим процессорам 6 и 7.
Если одному из процессоров 6 и 7, например первому 6, потребовалось изменить режим работы входного устройства 23, по системной магистрали 11 первого пути в регистр состояния 20 передается новое слово состояния. Если устройство контроля 21 данного пути не выдает сигнала на вход запрета 26, поступившее на вход управления 27 средства 25 изменения режима работы входного устройства, слово состояния произведет соответствующие изменения и на выходе 28 средства 25 появятся необходимые сигналы управления входным устройством 23. Кроме того, сигналы с выхода 28 поступают на регистр режима работы 24, с которого информация может считываться обоими процессорами по магистралям 11 и 12. Второй процессор 7, таким образом, по своей системной магистрали 12 имеет сведения о состоянии триггера сброса 22 первого пути 3 и сигналах, управляющих входным устройством 23, обусловленных словом состояния, переданным первым процессором 6. Если устройство контроля 21 первого пути 3 выдает сигнал появления неразрешенного командного слова (или задержки прихода разрешенного командного слова), устанавливается в единицу триггер сбоя 22 и запрещается прохождение сигнала управления средством 25 изменения режима работы входного устройства из регистра состояния 20 первого пути 3 по входу 27. Если второй процессор 7 имеет необходимость изменения параметров входного устройства 23, то при установленном в единицу триггере сбоя 22 первого пути второй процессор 7 выставляет по магистрали 12 слово состояния в соответствующий регистр состояния 20 второго пути 4. Теперь управление входным устройством 23 осуществляется средством 25 изменения режима работы входного устройства под воздействием сигналов по входу 27 со стороны регистра состояния 20 второго пути 4.
Первый процессор 6 сможет опять взять на себя управление входным устройством 23, если в нем возникнет такая необходимость, только если по какой-либо причине установится в единицу триггер сбоя 22 второго пути 4.
Одной из причин срабатывания устройства контроля 21 и установки триггера сбоя 22 в единицу может быть повреждение магистрали 11 или 12, что приводит к задержке появления очередной разрешенной команды на время, большее заранее заданного интервала. Особенно недопустимо такое "зависание", если перед этим управлявший режимом входного устройства 23 процессор переключил входное устройство 23 в испытательный режим, при котором с датчика 1 по обоим путям 3 и 4 канала 2 передаются сигналы, не соответствующие величине наблюдаемого параметра процесса. В этом случае установка триггера сбоя 21 позволяет другому процессору взять управление на себя и переключить входное устройство 23 в основной режим мониторинга.
Устройство контроля 21 (фиг. 3) работает следующим образом. Когда по входу 29 с системной магистрали (11 или 12) данного пути на устройство распознавания адреса 36 поступает адрес, присвоенный данному датчику 1, устройство распознавания адреса 36 разрешает устройству распознавания команды 37 принять и проанализировать командное слово. Если это разрешенное командное слово, устройство 37 по выходу 44 подает сигнал на вход 40 обнуления таймера 38, который начинает счет тактов для определения величины промежутка времени между соседними разрешенными командами. Если командное слово оказалось неразрешенным, с выхода 39 устройства 37 на вход 46 схемы 42 поступает сигнал, который устанавливает ее в "1". В другом случае, если очередная разрешенная команда задерживается, с выхода 44 не поступает сигнала на вход 40 обнуления таймера 38. Тогда через заданное число тактов на выходе 41 таймера 38 появится сигнал, который, поступая на вход 43 схемы 42 также устанавливает ее в "1". При установке схемы 42 в "1" на ее выходе 30 появляется сигнал, который является сигналом запрета на входе 26 устройства 25 (на фиг. 2). Сигнал на выходе 30 устанавливает в "1" ячейку 22 для фиксации состояния сбоя данного пути (на фиг. 2). Упомянутый выше сигнал на выходе 44 устройства 37 (появляющийся при приходе разрешенного командного слова) поступает также на вход 45 схемы 42 и сбрасывает ее в "0". При этом сигнал запрета на выходе 30 пропадает. Таким образом, приход следующей опознанной разрешенной команды вызывает сброс в "0" средства фиксации появления неправильной команды (схемы 42) и затем сброс в "0" ячейки 22, что снимает указание о состоянии сбоя данного пути (на фиг. 2).
Средство 25 изменения режима работы входного устройства (фиг. 4) работает следующим образом. Средство 25 имеет, как это видно из схемы, две симметричные части, относящиеся соответственно к первому 3 и второму 4 путям канала. Рассмотрим работу одной из них, вторая действует аналогично. На вход управления 26 из регистра состояния 20 (фиг. 2) поступают сигналы изменения режима работы входного устройства 23. В данном варианте на вход 26 поступает одновременно один сигнал из двух возможных, но это является упрощенным вариантом для иллюстрации, возможны и другие аналогичные способы управления, использующие сочетания сигналов по проводам входа 26. Значения сигналов определяются словом состояния в регистре состояния 20 (фиг. 2). Сигнал со входа 26 проходит соответствующую схему "И" (например, 47) и поступает на вход схемы 51 (устройство управления усилением входного устройства). На второй вход схемы "И" 47 со входа 27 подается сигнал запрета средства изменения режима работы, который запрещает прохождение сигнала со входа 26 (или разрешает прохождение этого сигнала, если не возникла ситуация неисправности, обнаруженная устройством 20 контроля появления разрешенных и неразрешенных командных слов). Сигнал с выхода 55 схемы 51 обеспечивает изменение усиления входного устройства 23 путем изменения сопротивления узла 63 регулируемой обратной связи операционного усилителя 59 (фиг. 5). Другой сигнал управления со схем "И" 48 или 50 может поступить на вход схемы 52 (устройство управления видом подключения датчика). Устройство 52 своими сигналами на выходе 56 обеспечивает изменение вида подключения датчика 1, как это будет описано ниже.
Входное устройство (фиг. 5) работает следующим образом. В основном режиме мониторинга работы реактора на вход 64 операционного усилителя 57 с датчика 1 (например, β-эмиссионного детектора) через вход 31 поступает сигнал тока эмиттера датчика. Одновременно на вход 64 операционного усилителя 58 с датчика 1 через вход 32 поступает сигнал тока фона датчика. На вторые входы 65 операционных усилителей 57 и 58 подается потенциал земли. Усиленные сигналы с выходов операционных усилителей 57 и 58 подаются на входы 64 и 65 операционного усилителя 59, усиленная разность этих сигналов с выхода операционного усилителя 59 через замкнутый контакт 60 поступает на выход 33 входного устройства 23. Контакты 62 и 63 в этом режиме разомкнуты.
Если необходимо изменить коэффициент усиления входного устройства, схема 51 (фиг. 4) производит по входу 66 изменение сопротивления узла 63 регулируемой обратной связи операционного усилителя 59.
Если необходимо измерить сопротивление изоляции цепи эмиттера датчика 1, на вход 67 из схемы 52 (фиг. 4) поступает сигнал, который замыкает контакт 61, при этом контакты 60 и 62 разомкнуты. Таким образом, первый выход 34 датчика 1, соединенный с эмиттером датчика, через первый информационный вход 31 оказывается соединенным с выходом 33 входного устройства. Полученный сигнал после превращения в цифровую форму в средстве 18 (фиг. 2) генерации множества цифровых сигналов поступает в средство 19 запоминания указанного множества цифровых сигналов, откуда может быть считан по магистрали 11 или 12 соответствующим процессором 6 или 7. Если необходимо измерить сопротивление изоляции цепи фона датчика, на вход 67 из схемы 52 (фиг. 4) поступает сигнал, который замыкает контакт 62, при этом контакты 60 и 61 разомкнуты. Второй выход 35 датчика 1, соединенный с цепью фона датчика, через второй информационный вход 32 оказывается соединенным с выходом 33 входного устройства. Полученный сигнал после превращения в цифровую форму в средстве 18 (фиг. 2) генерации множества цифровых сигналов поступает в средство 19 запоминания указанного множества цифровых сигналов, откуда также может быть считан по магистрали 11 или 12 соответствующим процессором 6 или 7. Таким образом, можно порознь измерить сопротивление изоляции цепи эмиттера и цепи фона датчика.
Предложенные способ сбора и обработки данных и система для его осуществления обеспечивают бесконфликтное управление изменением сигналов датчика со стороны нескольких (например, двух) избыточных процессоров, которые работают по одинаковым программам независимо друг от друга и связаны с датчиком каналом, содержащим одинаковые независимые пути. Независимость путей и процессоров гарантирует достоверность получаемых параметров при совпадении их значений. Предложенный способ позволяет иметь на передающей части канала сравнительно несложное и надежное оборудование для разрешения конфликтов управления.
С точки зрения промышленной осуществимости предлагаемой системы следует отметить, что она может быть изготовлена с применением широко распространенных недорогих компонентов, что особенно важно при использовании большого числа датчиков в зоне ядерного реактора для осуществления мониторинга.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ 4-КАНАЛЬНОЙ ОТКАЗОУСТОЙЧИВОЙ СИСТЕМЫ БОРТОВОГО КОМПЛЕКСА УПРАВЛЕНИЯ ПОВЫШЕННОЙ ЖИВУЧЕСТИ И ЭФФЕКТИВНОГО ЭНЕРГОПОТРЕБЛЕНИЯ И ЕГО РЕАЛИЗАЦИЯ ДЛЯ КОСМИЧЕСКИХ ПРИМЕНЕНИЙ | 2011 |
|
RU2449352C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ В СИСТЕМАХ С КОДОВЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2234191C2 |
| Вычислительная система с холодным резервом | 2021 |
|
RU2771211C1 |
| ПАНОРАМНЫЙ АВИАЦИОННЫЙ ИНДИКАТОР | 2022 |
|
RU2800102C1 |
| СИСТЕМА ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ОБОРУДОВАНИЕМ | 2000 |
|
RU2189623C2 |
| СИСТЕМА ТЕЛЕСИГНАЛИЗАЦИИ СТАЦИОНАРНЫХ И МОБИЛЬНЫХ ОБЪЕКТОВ | 1998 |
|
RU2143745C1 |
| ОТКАЗОУСТОЙЧИВАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА С АППАРАТНО-ПРОГРАММНОЙ РЕАЛИЗАЦИЕЙ ФУНКЦИЙ ОТКАЗОУСТОЙЧИВОСТИ И ДИНАМИЧЕСКОЙ РЕКОНФИГУРАЦИИ | 2010 |
|
RU2455681C1 |
| УСТРОЙСТВО КОНТРОЛЯ ПРОЧНОСТИ КРЫЛА ВОЗДУШНОГО СУДНА | 2011 |
|
RU2469289C1 |
| СПОСОБ ТЕХНИЧЕСКОГО КОНТРОЛЯ И ДИАГНОСТИРОВАНИЯ БОРТОВЫХ СИСТЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА С ПОДДЕРЖКОЙ ПРИНЯТИЯ РЕШЕНИЙ И КОМПЛЕКС КОНТРОЛЬНО-ПРОВЕРОЧНОЙ АППАРАТУРЫ С ИНТЕЛЛЕКТУАЛЬНОЙ СИСТЕМОЙ ПОДДЕРЖКИ ПРИНЯТИЯ РЕШЕНИЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2557771C1 |
| БОРТОВОЙ ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС ВЫСОКОСКОРОСТНОГО ПОЕЗДА | 2003 |
|
RU2238208C1 |
Система сбора и обработки сигналов может быть использована в системе контроля активной зоны ядерного реактора. Система содержит два или более параллельных шинных пути прохождения сигналов от датчика к двум процессорам. Все пути содержат идентичные аппаратные и программные средства и управляются по аналогичным программам. В составе технических средств имеются общие для всех путей технические средства (в частности входное устройство), причем управление этими средствами осуществляется в каждый данный момент одним из процессоров по своему пути независимо от других процессоров. При возникновении неисправности или сбоя в технических средствах управляющего пути в общей части канала производится отключение управления по этому пути и сообщается другим процессорам о возможности осуществлять управление по их путям. Технический результат - независимость путей и процессоров и гарантированная достоверность получаемых параметров при совпадении их значений. 2 с. и 1 з. п. ф-лы, 5 ил.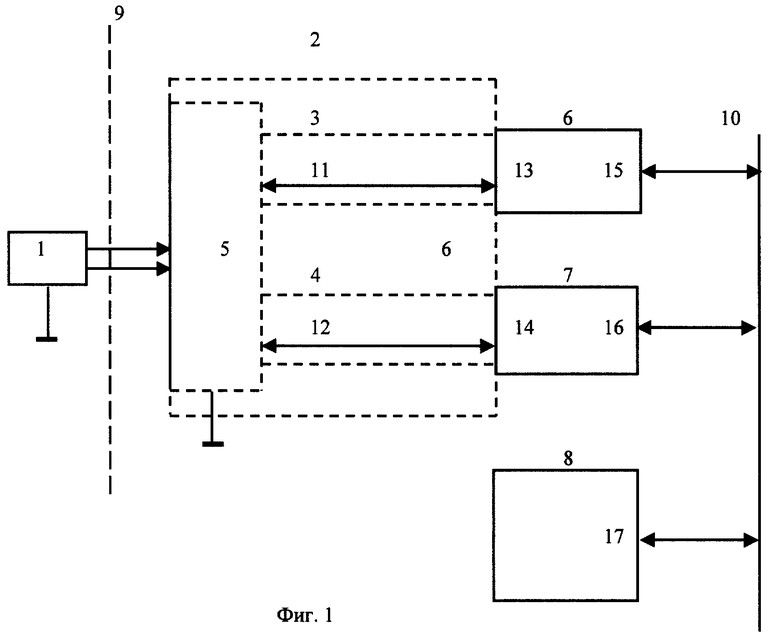
| US 4668465 A, 26.05.1987 | |||
| СПОСОБ УПРАВЛЕНИЯ РАЗОГРЕВОМ РЕАКТОРА | 1993 |
|
RU2068204C1 |
| RU 94031015 A1, 20.06.1996 | |||
| US 4490785 A, 25.12.1984 | |||
| US 4974144 A, 27.11.1990 | |||
| US 5519740 A, 21.05.1996 | |||
| US 5555279 A, 10.09.1996 | |||
| СОСТАВ И СПОСОБ ПОЛУЧЕНИЯ ЭЛАСТИЧНЫХ ОГНЕУПОРНЫХ ИЗДЕЛИЙ | 2000 |
|
RU2171242C1 |
| Муфта | 1987 |
|
SU1548587A1 |
| Способ обнаружения пробитых изоляторов | 1955 |
|
SU100640A1 |

