Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах автоматизированного контроля и управления атомными электростанциями (АЭС) для построения управляющих систем безопасности (УСБ) АЭС.
Известна цифровая система защиты атомной станции (патент США №6049578, МПК G21C 7/36, публ. 11.04.2000, аналог), состоящая из четырех идентичных каналов обработки и управления, обеспечивающих распознавание аварийной ситуации на объекте путем сравнения цифровых значений измеряемых параметров с заданными уставками и выполнения заданных пользователем защитных действий в случае выхода параметров за границы уставок. Каналы безопасности, физически отделенные друг от друга, перекрестно соединены по оптоволоконным линиям связи. Каждый канал состоит из аналоговых и дискретных датчиков, связанных с этим каналом; аналогово-цифровых преобразователей, обеспечивающих на выходе цифровое представление измеряемых аналоговых сигналов; бистабильного процессора; логического процессора соответствия и логического процессора инициирования процедур управления исполнительными механизмами и средств автоматической защиты реактора. Бистабильный процессор принимает цифровые значения измеренных сигналов собственного канала, преобразует их в технологические параметры, проверяет измеренные параметры на отклонение за установленные границы, формирует по каждому параметру двоичный признак отклонения, передает эти признаки по оптоволоконным линиям в другие каналы обработки и управления. Логический процессор соответствия получает от бистабильного процессора своего канала двоичные признаки отклонения параметров сигналов данного канала и принимает по оптоволоконным линиям от других каналов двоичные признаки отклонения по соответствующим параметрам. По каждому параметру логический процессор соответствия проверяет поступление признаков выхода за допустимые границы 2-х из 4-х каналов. Если процессор соответствия обнаруживает отклонение от допустимых значений параметров по 2-м из 4-х каналов, то логический процессор инициирования формирует необходимые команды для остановки реактора и приведения в действие цифровых технических средств безопасности.
Аналог имеет следующие недостатки.
Обмен данными между каналами по оптоволоконным линиям связи и обработка этих данных по мажоритарному принципу резервирования "2 из 4-х" производится только на начальном этапе сбора и обработки входных сигналов датчиков технологического процесса. Это снижает надежность системы защиты и может вызвать появление в каналах безопасности ложных команд защиты и управления из-за неисправностей в логике обработки и инициирования управления исполнительными механизмами.
Прикладное программное обеспечение системы распределено между несколькими процессорами, выполняющими отдельные задачи защиты. Это снижает надежность, усложняет прикладные программы защиты и затрудняет разработку прикладного программного обеспечения автоматизированными методами, которые позволяют исключить на уровне прикладных алгоритмов программные ошибки, вызывающие отказы по общей причине во всех каналах системы защиты.
В каждом канале четырехканальной системы защиты имеется отдельная аппаратура контроля и тестовые панели, но отсутствуют программно-технические средства, обеспечивающие дистанционное ручное управление защитными действиями с блочного и резервного пунктов управления.
Отсутствуют также средства связи с системой нормальной эксплуатации для передачи диагностической информации о выполнении функций защиты и состояния аппаратуры системы защиты на верхний уровень управления.
Известна управляющая цифровая система безопасности (УЦСБ) атомной электростанции и способ обеспечения параметров безопасности (патент РФ №2356111, МПК G21C 7/36, публикация 2009 г., прототип), состоящая из трех отдельных идентичных каналов безопасности, выполняющих оценку состояния объекта путем анализа значений параметров, принимаемых с датчиков процесса, и формирование управляющих защитных действий при наступлении аварийной ситуации. Физически разделенные каналы безопасности перекрестно связаны друг с другом по оптоволоконным линиям связи. Каждый канал включает устройство ввода входных сигналов, устройство сравнения, устройство формирования управляющих воздействий, устройство выбора блокировок, устройство управления исполнительными механизмами. Устройство ввода осуществляет ввод аналоговых сигналов процесса и преобразование их в цифровую форму. В устройстве сравнения производится сравнение значений считанных параметров с предварительно заданными цифровыми значениями и запуск устройства формирования управляющих сигналов, по которым устройство выбора блокировок инициирует генерацию сигналов управления исполнительными механизмами.
Прототип имеет следующие недостатки.
Прикладная программа в канале УЦСБ распределена по нескольким устройствам цифровой обработки, что снижает надежность и затрудняет автоматизированную разработку прикладного программного обеспечения, позволяющую исключить отказы по общей причине из-за ошибок в прикладных алгоритмах.
В УЦСБ каждое устройство цифровой обработки канала безопасности связано по перекрестным межканальным оптическим линиям с каждым соответствующим устройством в других каналах, образуя 4 уровня межканальных связей и мажоритарного резервирования устройств каналов безопасности. Данное резервирование по мажоритарному принципу оборудования каждого из нескольких устройств обработки и управления не эффективно, т.к. это оборудование составляет незначительную часть от всего оборудования канала и поэтому его мажоритарное резервирование не приводит к существенному повышению надежности управляющей системы безопасности, но требует значительных аппаратных затрат на межканальные связи. Также отсутствует контроль выдачи сигналов управления на ИМ.
Имеющиеся у прототипа проводные связи устройств управления исполнительными механизмами с БЩУ и РЩУ недостаточны для получения полной информации о состоянии ИМ, устройств управления ИМ и прикладных алгоритмов устройств обработки и управления, необходимой для локализации неисправностей и восстановления УЦСБ.
В составе УЦСБ отсутствуют также средства связи с системой нормальной эксплуатации, необходимые для передачи диагностической информации о выполнении функций защиты и состояния аппаратуры безопасности на верхний уровень системы нормальной эксплуатации.
Данное изобретение устраняет указанные недостатки.
Техническим результатом изобретения является:
- повышение надежности многоканальной управляющей системы безопасности (УСБ) за счет применения в каждом канале безопасности одного процессора для решения всех задач анализа состояния АЭС и управления защитой,
- исключение отказов по общей причине из-за скрытых ошибок в прикладном программном обеспечении за счет возможности разработки всего прикладного программного обеспечения автоматизированными методами в программной среде одного процессора,
- повышение эффективности мажоритарного резервирования за счет сокращения количества цифровых устройств обработки-процессора до одного и, соответственно, сокращения уровней межканального обмена и мажоритарного резервирования этих устройств,
- исключение выдачи ложных команд на исполнительные устройства из-за неисправностей устройств ввода сигналов и устройства обработки за счет двухуровнего мажоритарного резервирования,
- расширение функций дистанционного управления и диагностирования за счет введения информационной связи процессора каждого канала с системой нормальной эксплуатации и с блочным и резервным пунктами управления УСБ,
- сокращение времени восстановления и повышение готовности УСБ за счет введение отказоустойчивой и диагностируемой шины ввода вывода, которая построена на основе коммуникационных модулей и дуплексных интерфейсов типа "точка-точка" в виде структуры типа "дерево".
Технический результат достигается тем, что в управляющей цифровой системе безопасности атомной электростанции, содержащей множество идентичных каналов безопасности, каждый канал включает станции ввода вывода сигналов технологического процесса CBB1-n, станции приоритетного управления исполнительными механизмами СПУ1-m, которые соединены с блочным пунктом управления БПУ и резервным пунктом управления РПУ, контроллер автоматизации средств безопасности КА СБ, шину ввода вывода средств безопасности ШВВ СБ обмена данными контроллера КА СБ со станциями СВВ и СПУ, и соединен с другими каналами безопасности с помощью перекрестных дуплексных оптоволоконных связей, станция СВВ содержит модули связи с технологическим процессом МСП1-k и коммуникационный модуль - преобразователь интерфейсов коммуникаций ПИК шины ШВВ СБ, станция СПУ содержит модули приоритетного управления исполнительными механизмами МПУ1-e и коммуникационные модули: модуль коммуникации голосования МКГ и модуль голосования МГ шины ШВВ СБ, контроллер автоматизации КА СБ содержит процессорный модуль автоматизации средств безопасности ПМА СБ и коммуникационные модули - модули разветвления MP-41-p шины ШВВ СБ, процессорный модуль автоматизации средств безопасности ПМА СБ каждого канала безопасности соединен с ПМА СБ других каналов безопасности с помощью перекрестных связей, выполненных на основе межпроцессорных интерфейсов МПИ типа "точка-точка", построенных на базе интерфейса Ethernet и специального коммуникационного протокола уровня данных. Шина ШВВ СБ канала безопасности имеет структуру типа "дерева", верхним корневым узлом которого является ПМА СБ канала безопасности, нижними конечными узлами - модули связи с процессом МСП1-k станций CBB1-n и модули приоритетного управления МПУ1-e станций СПУ1-m своего канала безопасности и модули приоритетного управления МПУ1-e станций СПУ1-m других каналов безопасности, а промежуточными узлами являются коммуникационные модули: MP-41-p контроллера автоматизации, ПИК станций ввода вывода и МКГ, МГ станций приоритетного управления, связи между модулями, находящимися в узлах шины ШВВ СБ выполнены в виде линий последовательного дуплексного интерфейса типа "точка-точка", межканальные линии связи между контроллером автоматизации КА СБ каждого канала безопасности и станциями приоритетного управления МПУ1-e других каналов безопасности выполнены на оптоволоконных кабелях. Каждый канал безопасности выполнен на одном процессоре, размещенном в процессорном модуле автоматизации ПМА, при этом мажоритарное резервирование по правилу выбора команд и данных "2 из N", где N - количество каналов безопасности, реализовано на двух уровнях межканального обмена: на уровне процессоров модулей ПМА СБ при получении процессором модуля ПМА СБ каждого канала безопасности команд и измеряемых параметров от процессоров модулей ПМА СБ других каналов безопасности по межпроцессорным интерфейсам МПИ и на уровне станций приоритетного управления в коммуникационных модулях МГ станций СПУ1-m при поступлении в СПУ1-m команд управления от процессоров модулей ПМА СБ всех каналов безопасности по шинам ШВВ СБ. В модулях МПУ станций СПУ выход ПЛИС логики приоритетного управления исполнительными механизмами - ПЛИС ЛПУ, подключен к ИМ и по обратным связям к контроллеру КА СБ канала безопасности через ПЛИС СБ и шину ШВВ СБ. Контроллеры КА СБ каналов безопасности соединены с БПУ и РПУ по межпроцессорным интерфейсам МПИ типа "точка-точка", выполненным на базе интерфейса Ethernet и специального коммуникационного протокола уровня данных. Контроллеры автоматизации КА СБ всех каналов безопасности подключены к системе нормальной эксплуатации по резервированной шине EN, построенной на базе коммутируемого интерфейса Ethernet, кольцевой структуры соединения сетевых коммутаторов и специального коммуникационного протокола уровня данных. В станции СВВ каждого канала безопасности коммуникационный модуль ПИК шины ШВВ СБ по отдельным линиям связи ШВВ СБ соединен с контроллером автоматизации КА СБ канала безопасности и с каждым модулем МСП1-k. В каждом канале безопасности станции СПУ объединены в группы по N станций, количество станций СПУ определяется количеством каналов безопасности, первая станция группы СПУ1 по линии связи ШВВ СБ соединена с контроллером КА СБ своего канала безопасности, другие станции СПУ2-n группы соединены с контроллерами КА СБ других каналов безопасности N-1, коммуникационный модуль МКГ каждой станции СПУ соединен с коммуникационным модулем голосования по мажоритарному правилу «2 из 4-х» МГ своей станции СПУ и коммуникационными модулями МГ других станций СПУ группы, коммуникационный модуль МГ каждой станции СПУ соединен по линиям связи ШВВ СБ с модулями приоритетного управления МПУ1-e этой станции.
Шина ШВВ СБ имеет две группы линий связи типа "точка-точка": линий нисходящего потока команд и данных от процессорного модуля ПМА СБ к модулям ввода вывода МСП и модулям приоритетного управления МПУ и линий восходящего потока данных от модулей МСП и МПУ к процессорному модулю ПМА СБ. Для нисходящего потока данных каждый коммуникационный модуль выполняют функцию разветвления данных, поступающих по одной из линий "дерева" от верхнего узла шины, на несколько линий связи к нижним узлам шины, а для восходящего потока данных - функции концентрации данных, поступающих в модуль по нескольким линиям "дерева" от нижних узлов шины, на линию связи модуля к верхним узлам шины. Скорость передачи нисходящего потока команд установлена постоянной для всех ветвей шины ввода вывода, а для восходящего потока данных скорость повышается от нижних ветвей "дерева" шины ввода вывода к верхним, чтобы исключить потери данных из-за информационной перегрузки линий связи шины. В коммуникационных модулях шины для восходящего потока данных установлена также буферная память типа FIFO, обеспечивающая демпфирование локальных кратковременных перегрузок в шине, которые могут возникать при отказах аппаратуры системы безопасности. Коммуникационные модули голосования МГ (модули голосования) в станциях приоритетного управления СПУ выполняют также мажоритарную обработку по принципу "2 из N" команд и данных нисходящего потока от всех каналов безопасности на втором уровне межканального обмена и мажоритарного резервирования.
Данная организация шины ввода вывода исключает многократные ошибки абонентов шины (модулей МСП или МПУ) из-за однократной неисправности связи в одном из них, затрудняющие локализацию неисправностей связи в абонентах шины. Неисправность абонента шины, вызывающая нарушение связи с ним по шине ввода вывода, не влияет на связь по шине с другим абонентом в связи с отсутствием на уровне подключения абонента к шине ШВВ СБ общей среды передачи данных, характерной для шин с магистральной организацией. Отказы в коммуникационных модулях могут нарушать работу на шине нескольких модулей МСП, МПУ, но такие неисправности в шине ввода вывода, имеющей структуру типа "дерево", локализуются с точностью до элемента замены (коммуникационного модуля) на основе информации об ошибках подключенных к шине абонентов. Кроме того, вероятность появления неисправностей в коммуникационных модулях шины ШВВ СБ значительно ниже, чем в модулях МСП и МПУ.
Возможность локализации неисправностей до модулей замены - коммуникационных модулей, в разветвленной шине ШВВ СБ обеспечивает минимальное время восстановления УСБ и высокую готовность.
Объединение станций СПУ в группы уменьшает количество межканальных связей по шине ШВВ СБ от N-1 (N - количество каналов безопасности) до одной на каждую станцию СПУ.
На первом уровне межканального обмена реализовано мажоритарное резервирование аппаратуры станций СВВ и контроллеров автоматизации КА СБ (модулей ПМА СБ и аппаратуры связи ПМА СБ со станциями СВВ по шине ШВВ СБ) каналов безопасности, т.е. при неисправностях аппаратуры СВВ, процессорного модуля ПМА СБ и аппаратуры связи его с СВВ по шине ШВВ СБ в любых (N-2) каналах безопасности сохраняется работоспособность остальной части аппаратуры во всех каналах безопасности.
На втором уровне межканального обмена прием команд от модулей ПМА СБ всех каналов безопасности и мажоритарная обработка их по правилу "2 из N" выполнены в коммуникационном модуле МГ станции приоритетного управления непосредственно перед передачей сформированных в соответствие с указанным правилом команд по внутренним линиям шины ШВВ СБ станции СПУ в аппаратную логику приоритетного управления модулей МПИ. На этом уровне межканального обмена обеспечено мажоритарное резервирование аппаратуры связи ПМА СБ со станциями СПУ по шине ШВВ СБ каналов, т.е. при неисправностях аппаратуры связи ПМА СБ с СПУ по шине ШВВ СБ любых (N-2) каналов сохраняется работоспособность станций СПУ всех каналов безопасности.
Двухуровневая структура межканального обмена данными и применение одного процессора для решения всех задач логики защиты обеспечивает высокую надежность многоканальной УСБ, а также исключает выдачу ложной команды на станции приоритетного управления из-за неисправностей в станциях СВВ, процессоре ПМА СБ и шине ШВВ СБ при меньших по сравнению с четырехуровневой структурой прототипа аппаратных затратах на межканальный обмен. Работоспособность УСБ в целом сохраняется при сочетании указанных выше неисправностей и исправности станций СПУ хотя бы в одном канале безопасности.
Единая программная среда одного процессора для всех задач безопасности обеспечивает разработку прикладного программного обеспечения УСБ автоматизированными методами, которые исключают скрытые ошибки в прикладных программах, вызывающие отказы всех каналов безопасности по общей причине.
Контроллер КА СБ после передачи команды инициирования управления ИМ в модуль МПУ по шине ШВВ СБ производит контроль выдаваемой на ИМ команды путем чтения ее по обратной связи с выхода ПЛИС ЛПУ и сравнения ее с заданной командой. Если команда не соответствует заданной, то КА СБ регистрирует неисправность модуля МПУ и передает сообщение об этом по шине EN на верхний уровень управления системы нормальной эксплуатации и по интерфейсам МПИ1 в БПУ и МПИ2 в РПУ. Это обеспечивает локализацию неисправностей в цепи управления ИМ до модулей замены - модулей МПУ, и минимальное время восстановления функционирования путем замены модулей МПУ.
Дополнительные связи КА СБ с БПУ и РПУ, соответственно, по интерфейсам МПИ1 МПИ2 расширяют функции диагностики каналов УСБ со стороны БПУ и РПУ, обеспечивая передачу контроллером КА СБ в БПУ и РПУ детальной диагностической информации о состоянии логики приоритетного управления и исполнительных механизмов, поступающей в КА СБ по шине ввода вывода из модулей приоритетного управления, а также передачу в БПУ и РПУ информации о ходе выполнения алгоритмов защиты в КА СБ.
Связь КА СБ с системой нормальной эксплуатации по шине EN дополнительно расширяют диагностические возможности УСБ со стороны верхнего уровня управления.
Сущность изобретения поясняется чертежами.
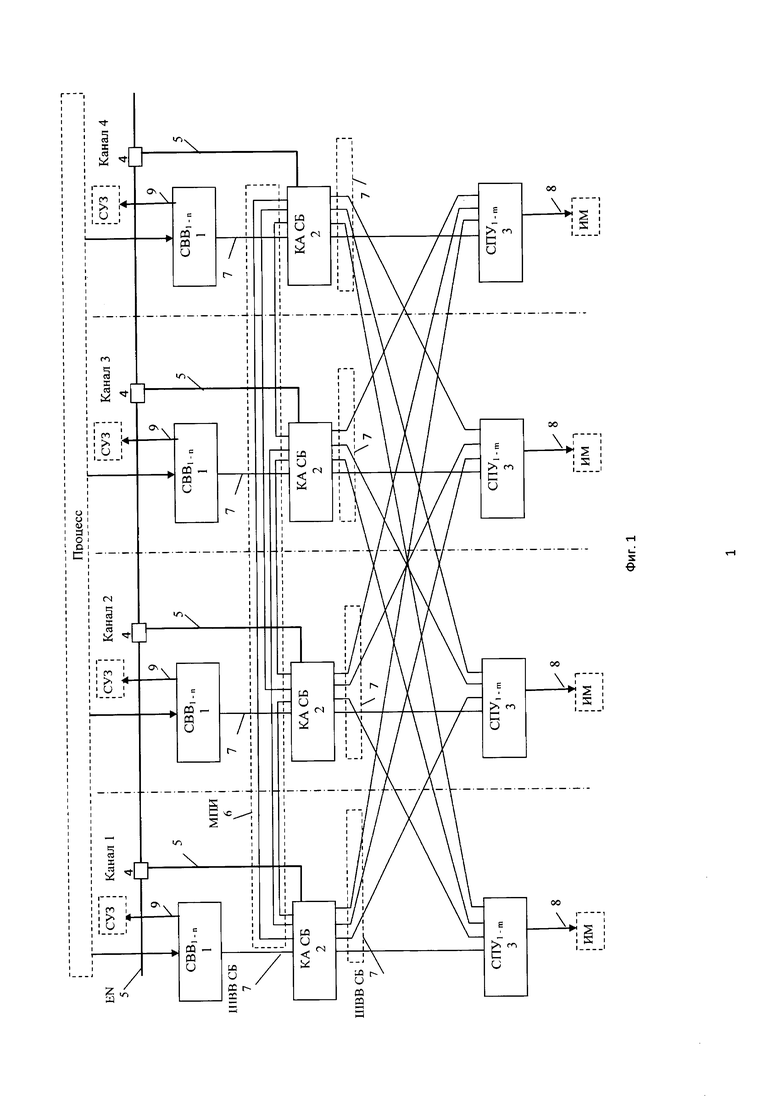
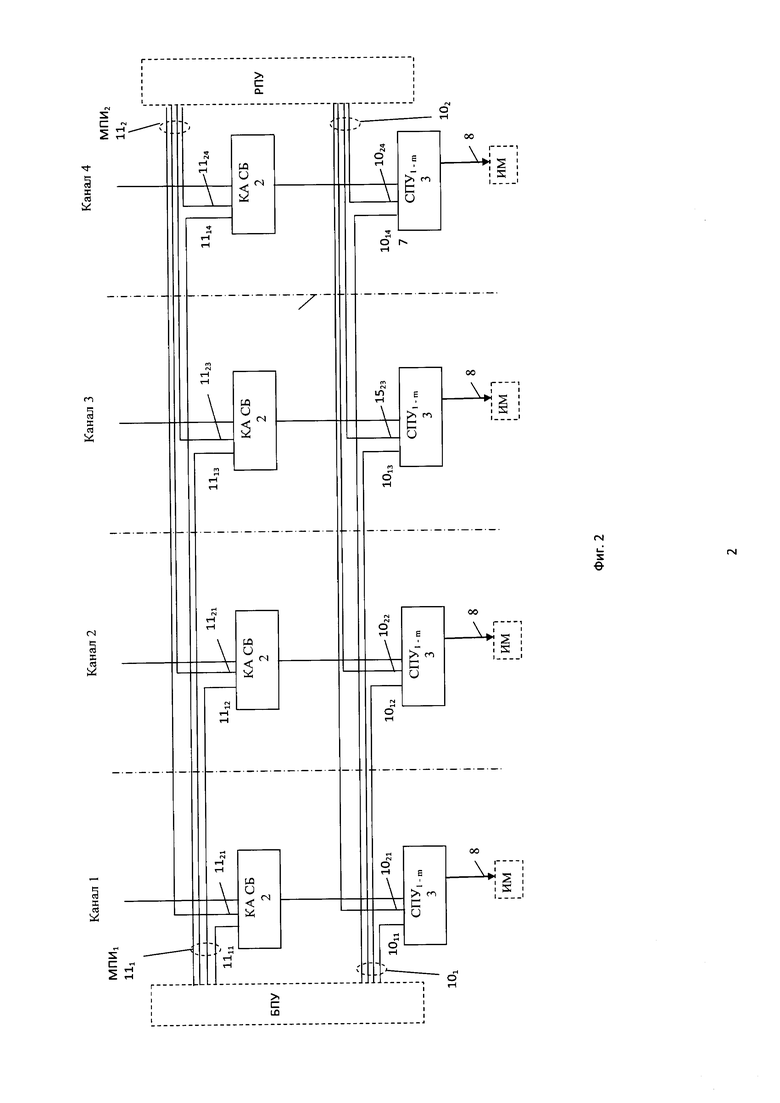
На фиг. 1 и фиг. 2 схематично представлена структура четырехканальной управляющей системы безопасности УСБ, в которой: 1- станции ввода вывода CBB1-n, n - количество станций СВВ в одном канале УСБ; 2 - контроллер автоматизации системы безопасности КА СБ; 3 - станции приоритетного управления СПУ1-m, m - количество станций СПУ в одном канале УСБ; 4 - сетевые коммутаторы шины EN; 5 - резервированная шина EN нормальной эксплуатации; 6 - межпроцессорный интерфейс МПИ связи контроллеров КА СБ каждого канала безопасности с КА СБ других каналов безопасности; 7 - шина ввода вывода безопасности ШВВ СБ; 8 - сигналы управления исполнительными механизмами ИМ; 9 - сигналы управления СУЗ; 101 - проводные линии связи станций СПУ каждого канала УСБ с БПУ; 102 - проводные линии связи станций СПУ каждого канала УСБ с РПУ; 111 - межпроцессорные интерфейсы связи МПИ1 контроллеров КА СБ каждого канала безопасности с БПУ; 112 - межпроцессорные интерфейсы связи МПИ2 контроллеров КА СБ каждого канала безопасности с РПУ,
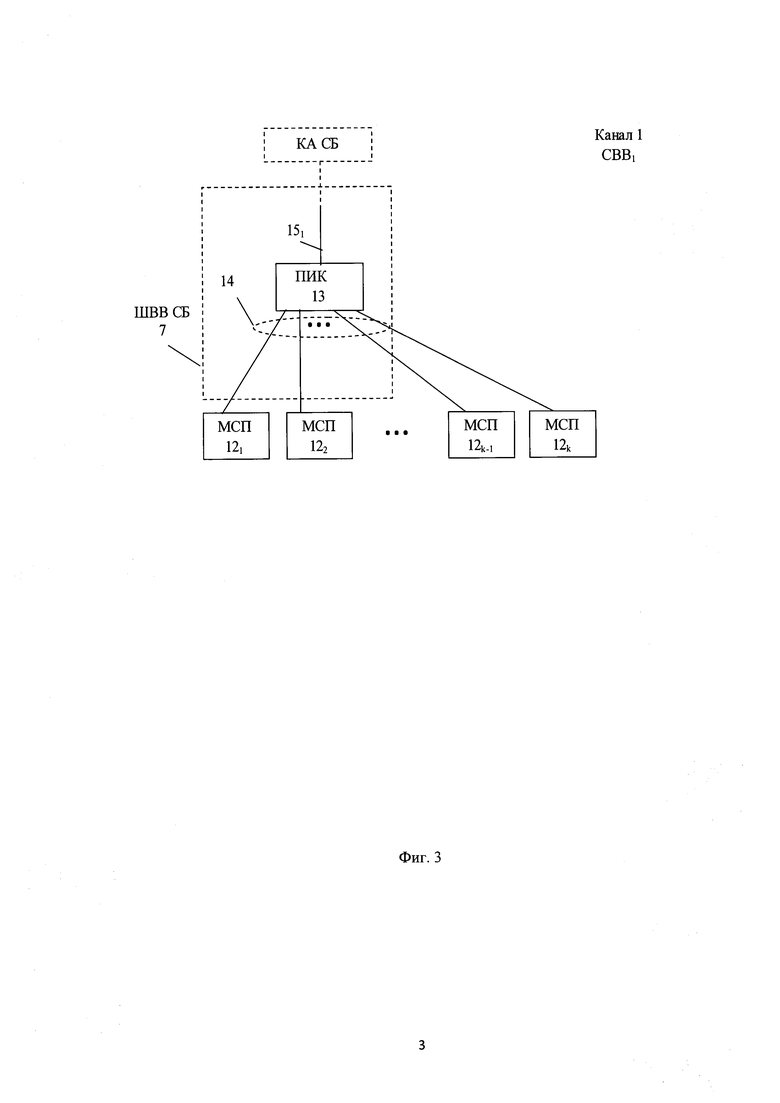
На фиг. 3 представлена структурная схема станции ввода вывода СВВ (на примере станции CBB1 канала 1), в которой: 7 - фрагмент шины ввода вывода ШВВ СБ; 121 - 12k - модули связи с процессом МСП, к - количество модулей МСП в станции СВВ; 13 - коммуникационный модуль ПИК; 14 - линии связи коммуникационного модуля ПИК 13 с модулями МСП 121 - 12k по шине ШВВ СБ 7; 151 - линия связи модуля ПИК 14 станции CBB1 с контроллером автоматизации КА СБ по шине ШВВ СБ 7.
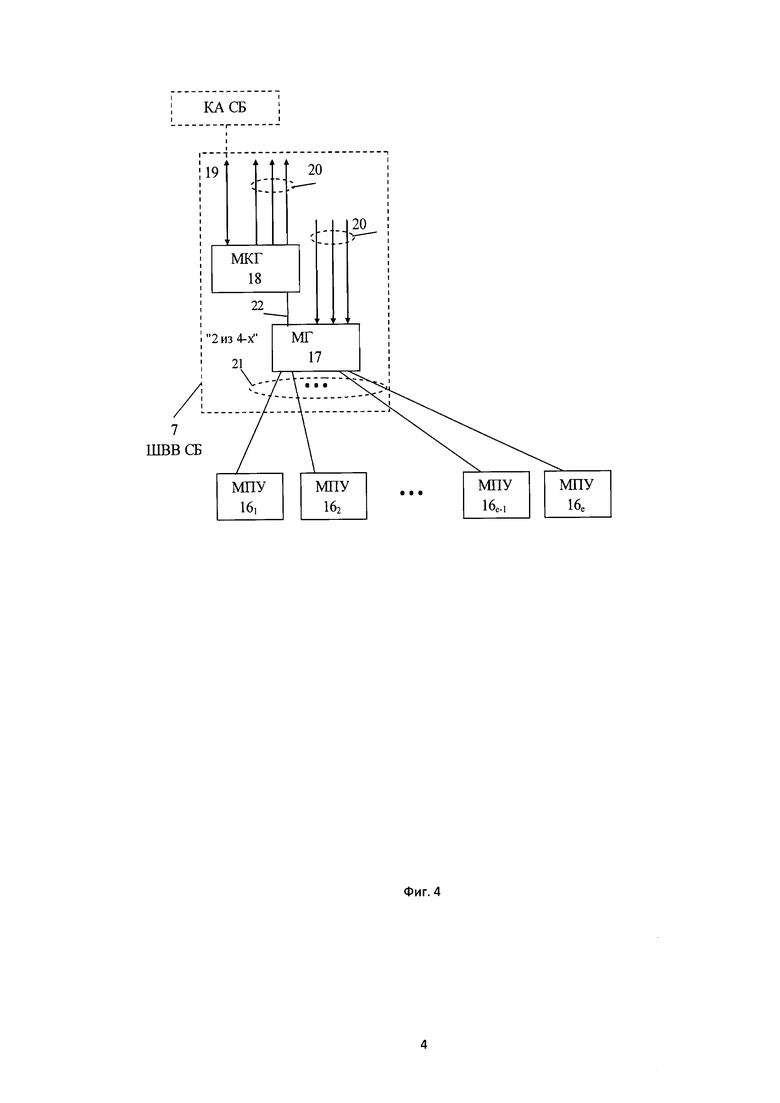
На фиг. 4 представлен вариант структурной схемы станции приоритетного управлениям СПУ (на примере станции СПУ, входящей в группу из 4-х станций, связанных с КА СБ каждого из 4-х каналов по одной линии ШВВ СБ), в которой: 7 - фрагмент шины ввода вывода ШВВ СБ; 161 - 16e - модули приоритетного управления МПУ, е - количество модулей МПУ в станции СПУ; 17 - коммуникационный модуль голосования по правилу "2 из 4-х" МГ; 18 - коммуникационный модуль МКГ; 19 - линия связи МКГ 18 с контроллером КА СБ своего или другого канала безопасности по шине ШВВ СБ 7; 20 - межстанционные линии связи модулей МКГ (МГ) станции СПУ группы с модулями МГ (МКГ) 3-х других станций группы по шине ШВВ СБ; 21 - линии связи модуля МГ 17 по шине ШВВ СБ 7 с модулями МПУ 161 - 16е; 22 - линия связи модуля МКГ с модулем МГ в станции СПУ.
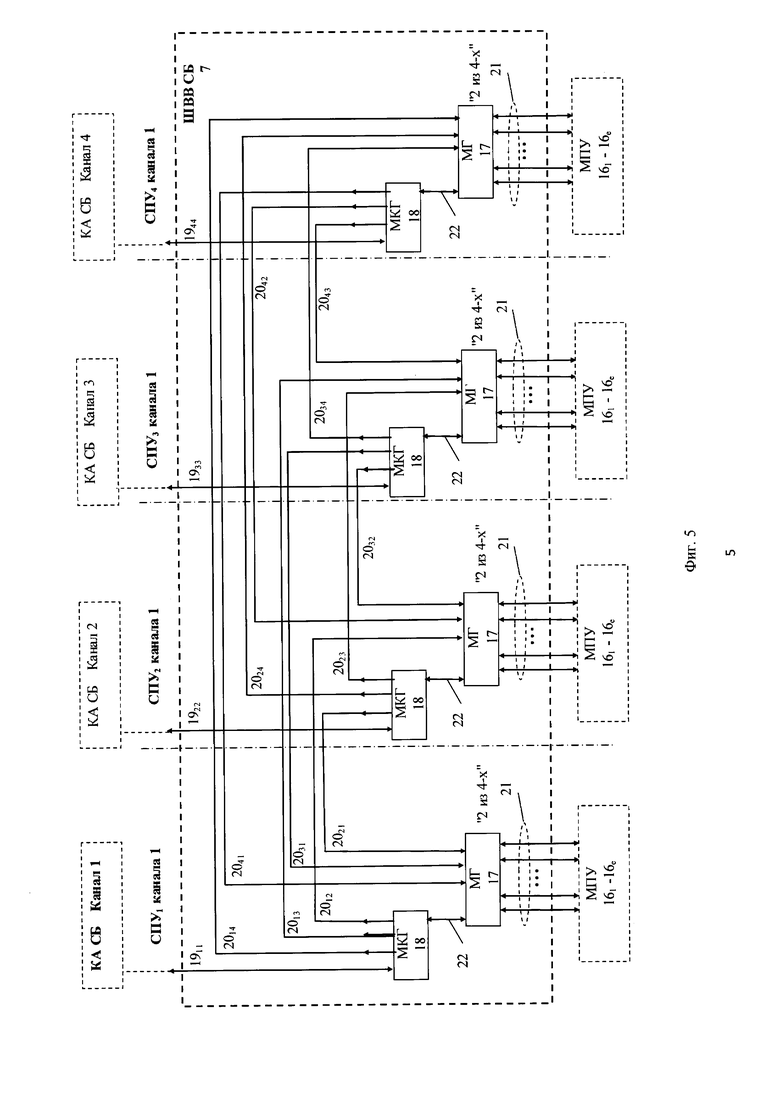
На фиг. 5 показана структура связей по шине ШВВ СБ группы из 4-х станций СПУ1-4 канала 1 безопасности со своим контроллером КА СБ и с контроллерами КА СБ А 3-х других каналов безопасности, в которой: 7 - фрагмент шины ШВВ СБ; 17 - коммуникационный модуль голосования МГ; 18 - коммуникационный модуль МКГ; 19, 1911, 1922, 1933, 1944) - линии связи по шине ШВВ СБ модулей МКГ группы станций канала 1 с контроллерами КА СБ своего (канала 1) и 3-х других каналов безопасности; 20 (2012, 2013, 2014, 2021, 2023, 2024, 2031, 2032, 2034, 2041, 2042, 2043) - межстанционные линии связи модуля МКГ каждой станции СПУ1-4 с модулями МГ 3-х других станций группы по шине ШВВ СБ; 21 - линии связи модуля МГ 17 по шине ШВВ СБ 7 с модулями МПУ 161 - 16e; 22 - линия связи модуля МКГ с модулем МГ в станции СПУ.
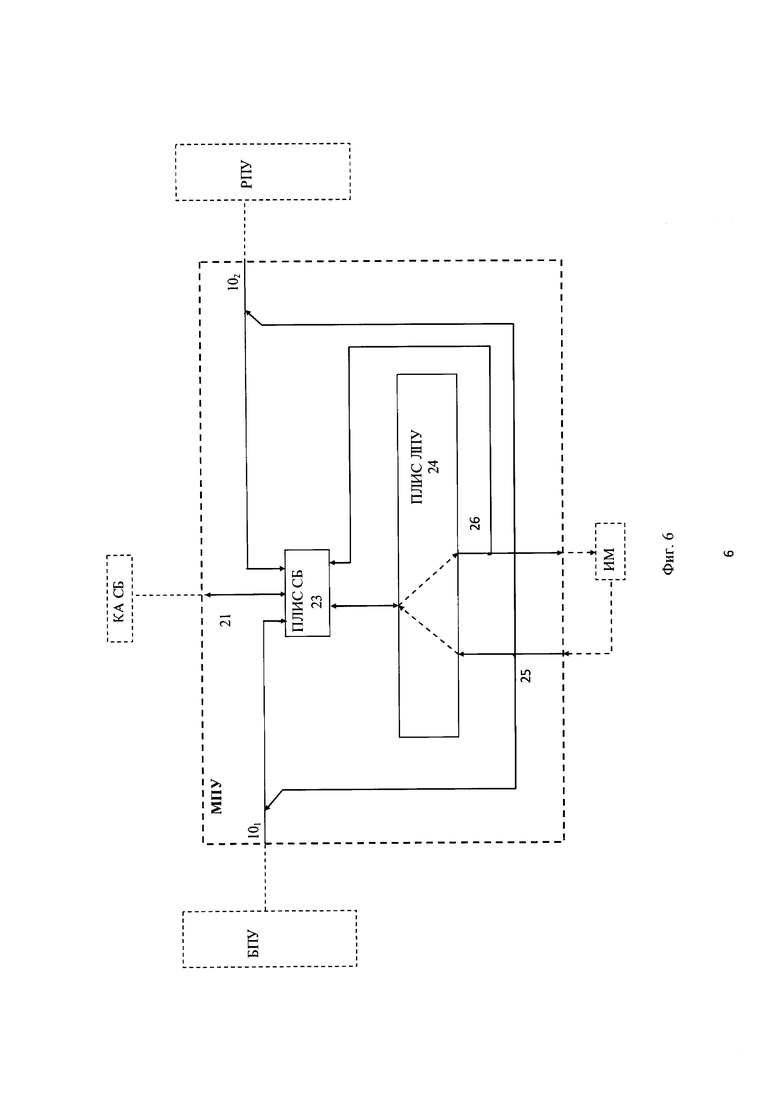
На фиг. 6 представлена структурная схема модуля приоритетного управления МПУ в которой: 101 - проводные линии дистанционного управления ИМ из БПУ; 102 - проводные линии дистанционного управления ИМ из РПУ; 21 - линия связи шины ШВВ СБ; 23 - программируемая логическая схема ПЛИС СБ; 24 - ПЛИС логики приоритетного управления ПЛИС ЛПУ; 25 - связь ввода сигналов состояния ИМ; 26 - обратная связь опроса состояния команды управления, выдаваемой на ИМ.
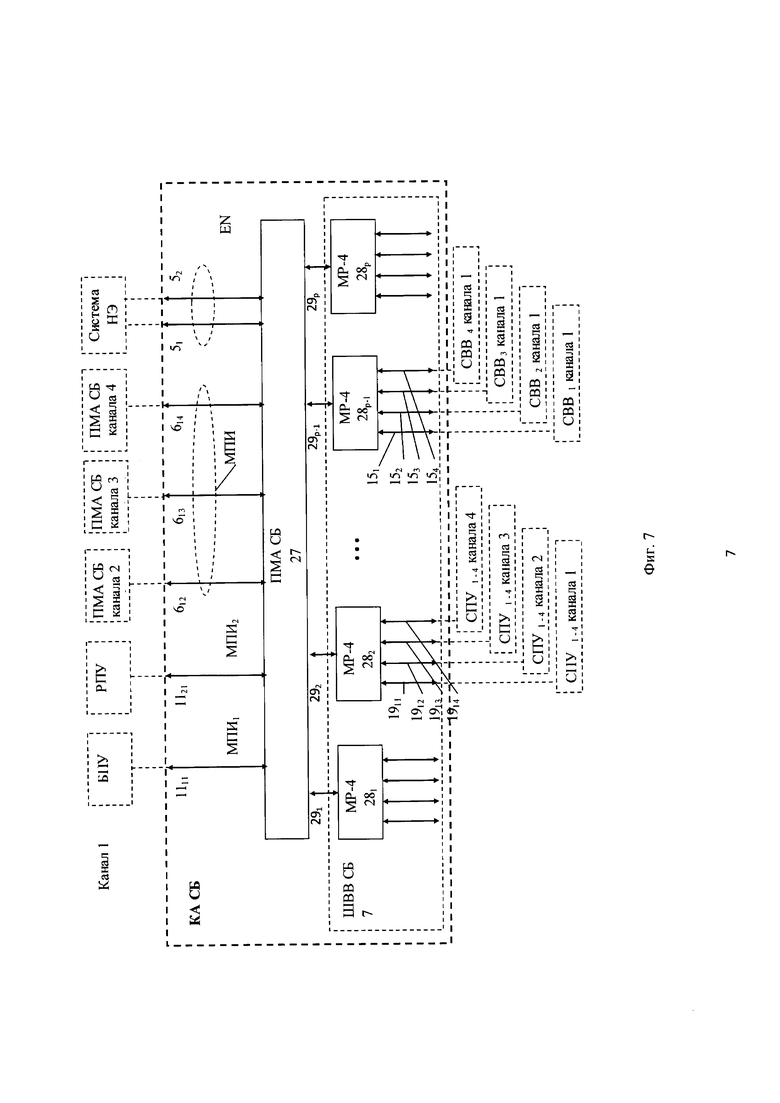
На фиг.7 представлена структурная схема контроллера автоматизации КА СБ (на примере КА СБ канала 1), в которой: 51, 52 - резервированная шина EN нормальной эксплуатации; 612, 613, 614, - межпроцессорные интерфейсы МПИ связи КА СБ канала 1 с КА СБ каналов 2, 3, 4; 7 - фрагмент шины ввода вывода ШВВ СБ; 1111, 1121 - интерфейсы связи процессора автоматизации ПМА СБ 27 канала 1 по интерфейсам МПИ1, МПИ2, соответственно, с БПУ и РПУ; 151, 152, 153, 154 - линии связи коммуникационного модуля МР-4 28р-1, соответственно, со станциями СВВ1, СВВ2, СВВ3, СВВ4 канала 1 по шине ШВВ СБ; 1911, 1912, 1913, 1914 - линии связи модуля МР-4 282 со станциями СПУ1-4 каналов 1, 2, 3, 4 по шине ШВВ СБ; 27 - процессорный модуль автоматизации ПМА СБ; 281 - 28p - коммуникационные модули МР-4; 291-p - связи ПМА СБ с коммуникационными модулями МР-4.
Комплекс программно-аппаратных средств УСБ на примере 4-канальной управляющей системы безопасности УСБ, схематично представленной на фиг. 1 и фиг. 2, работает следующим образом.
Станции ввода вывода CBB1-n каждого канала безопасности принимают аналоговые и двоичные сигналы технологического процесса, преобразуют их в цифровую форму и передают по шине ввода вывода безопасности ШВВ СБ 7 в контроллер автоматизации канала безопасности КА СБ 2. По командам КА СБ 2 станции СВВ также формируют и выдают сигналы 9 управления СУЗ.
Контроллер КА СБ 2 преобразует принятые цифровые значения аналоговых и двоичных сигналов в технологические параметры процесса, передает их по межпроцессорному интерфейсу МПИ 6 в контроллеры автоматизации КА СБ 2 других каналов безопасности, принимает параметры процесса от этих каналов безопасности и производит программный выбор параметров для дальнейшей обработки по мажоритарному правилу "2 из 4-х" на первом уровне межканального обмена и мажоритарного резервирования. Контроллер автоматизации КА СБ 2 сравнивает выбранные по мажоритарному правилу параметры процесса с заданными границами безопасной работы атомной станции. Дальнейшая обработка полученных параметров процесса производится на нескольких этапах выполнения алгоритмов защиты с промежуточным преобразованием результатов обработки, межканальным обменом по интерфейсам МПИ 6 и мажоритарной обработкой на каждом этапе.
Если контроллер КА СБ 2 обнаруживает в результате анализа входных параметров процесса аварийную ситуацию, он формирует и выдает по шине ШВВ СБ 7 команды инициирования защитных действий в станции приоритетного управления СПУ1-m 3 своего канала безопасности и в станции СПУ 3 других каналов безопасности на втором уровне межканального обмена. Если аварийная ситуация требует останова реактора, то КА СБ 2 выдает по шине ШВВ СБ 7 в станцию СВВ 3 команду управления СУЗ.
Контроллер автоматизации КА СБ 2 в процессе работы формирует и передает на верхний уровень системы нормальной эксплуатации по резервированной шине EN 5 нормальной эксплуатации диагностическую информацию о состоянии КА СБ станций СВВ и СПУ. Прием информации в КА СБ 2 по шине EN из системы нормальной эксплуатации блокируется.
Станции приоритетного управления СПУ1-m 3 принимают команды управления исполнительными устройствами от контроллера КА СБ 2 своего канала и от КА СБ 2 других каналов безопасности и аппаратно обрабатывают их по принципу резервирования "2 из 4-х" на втором уровне межканального обмена.
Станции СПУ1-m 3 по выбранным в соответствие с мажоритарным правилом "2 из 4-х" командам формируют сигналы управления исполнительными механизмами ИМ 8. Команды управления ИМ 8 поступают на исполнительные механизмы. В схемы приоритетного управления станций СПУ1-m дополнительно введены обратные связи, по которым КА СБ 2 производит чтение выдаваемых на ИМ 8 команд и проверку соответствия их заданным командам. Станции СПУ1-m принимают сигналы, состояния ИМ 8 для оценки реакции ИМ 8 на команды управления.
Станции СПУ1-m 3 канала безопасности получают также команды управления от других центров управления: блочного пункта управления БПУ, резервного пункта управления РПУ и формируют сигналы управления ИМ 8 в соответствии с приоритетами центров управления.
БПУ и РПУ в соответствии с фиг. 2 подключаются непосредственно к станциям СПУ1-m 3 каждого канала безопасности по проводным связям, а также к контроллерам КА СБ 2 по линиям связи интерфейсов МПИ1 111, МПИ2 112 интерфейса Ethernet типа "точка-точка" со специальным коммуникационным протоколом уровня данных.
По проводным линиям связи 101, 102 из БПУ и РПУ передаются в СПУ1-m 3 двоичные сигналы управления, а из СПУ1-m 3 в БПУ и РПУ - сигналы, отображающие состояния станций приоритетного управления и ИМ 8 для вывода на индикаторы панелей безопасности.
По линиям связи интерфейсов МПИ1 111, МПИ2 112 из контроллера КА СБ 3 каналов безопасности передается в БПУ и РПУ диагностическая информация о выполнении алгоритмов защиты и расширенная диагностическая информация о состоянии исполнительных механизмов и модулей приоритетного управления.
Станция СВВ, структура которой представлена на фиг. 3 на примере станции СВВ1 канала 1, содержит: коммуникационный модуль: ПИК 13 шины ШВВ СБ 7, модули связи с процессом МСП 121 - 12k. Модуль ПИК соединен по отдельным линиям связи ШВВ СБ 14 типа "точка-точка" последовательного дуплексного интерфейса с каждым модулем МСП 121 - 12k и по линии связи шины ШВВ СБ 151 - с контроллером автоматизации КА СБ.
Коммуникационный модуль ПИК 13 распределяет команды и данные, поступающие по линии 151 от контроллера КА СБ 2, на линии связи 14 с модулями МСП и концентрируют данные, поступающие по линиям 14 от модулей МСП, на линиях связи 151 станции СВВ с КА СБ. По линии связи 151 осуществляется доступ к каждому модулю МСП станции ввода вывода для передачи и приема данных со стороны КА СБ.
Модули связи с процессом МСП 121 - 12k выполняют функции приема и воспроизведения аналоговых и двоичных сигналов процесса, преобразования входных сигналов процесса в цифровую форму и цифровых значений выходных сигналов в аналоговую форму, предварительную обработку входных сигналов, связь с контроллером КА СБ по линии связи 14, 151 шины ШВВ СБ 7.
Структура станции приоритетного управления СПУ представлена на фиг. 4 на примере станции СПУ канала 1, входящей в группу из 4-х станций СПУ1-4, с которыми контроллер автоматизации КА СБ каждого канала осуществляет обмен данными по одной линии связи шины ШВВ СБ. Станция СВВ содержит: коммуникационный модуль МКГ 18, коммуникационный модуль голосования МГ 17, модули приоритетного управления МПУ 161 - 16е. Модуль МГ соединен: по отдельным линиям разветвления 21 ШВВ СБ 7 типа "точка-точка" последовательного дуплексного интерфейса с каждым модулем МПУ 161 - 16e; по 3-м линиям концентрации 20 шины ШВВ СБ 7 с коммуникационными модулями МКГ 3-х других станций СПУ.
Коммуникационный модуль МГ 17 выполняет функции разветвления нисходящего потока команд и данных от КА СБ в модули МПУ 161 - 16e и концентрации восходящего потока данных от модулей МПУ 161 - 16e в КА СБ а также функции аппаратного мажоритарного выбора команд и данных нисходящего потока от 4-х каналов безопасности, получаемых по линиям связи 22, 20 ШВВ СБ 7 по правилу мажоритарной обработки "2 из 4-х" для передачи в модули МПУ 161 - 16e.
Коммуникационный модуль МКГ 18 соединен: по линии 22 ШВВ СБ с коммуникационным модулем МГ 17 своей станции СПУ; по 3-м линиям разветвления 20 ШВВ СБ - с коммуникационными модулями МГ 3-х других станций канала безопасности 1; по линии концентрации 19 шины ШВВ СБ 7 в станции СПУ1 - с КА СБ собственного канала безопасности 1, по линии концентрации 19 шины ШВВ СБ 7 в 3-х других станциях СПУ - с КА СБ 3-х других каналов безопасности.
На фиг. 5 показана структура связей по шине ШВВ СБ группы из 4-х станций СПУ1-4 канала безопасности 1 с контроллером КА СБ этого канала безопасности и с контроллерами КА СБ А 3-х других каналов безопасности. Модуль МКГ 18 станции СПУ1 по линии связи 1911 соединен с контроллером КА СБ своего канала 1, модуль МКГ 18 станции СПУ2 по линии связи 1922 соединен с контроллером КА СБ канала 2, модуль МКГ 18 станции СПУ3 по линии связи 1933 соединен с контроллером КА СБ канала 3, модуль МКГ 18 станции СПУ4 по линии связи 1944 соединен с контроллером КА СБ канала 4. Модуль МКГ 18 в каждой станции СПУ1-4 соединен с модулями МГ 3-х других станций СПУ группы: по линиям разветвления 2012, 2013, 2014 в станции СПУ1, по линиям разветвления 2021, 2023, 2024 в станции СПУ2, по линиям разветвления 2031, 2032, 2034 в станции СПУ3, по линиям разветвления 2041, 2042, 2043 в станции СПУ4.
По указанным связям шины ШВВ СБ команды и данные от контроллера КА СБ каждого из 4-х каналов поступают в модули МГ каждой станции группы, для выполнения мажоритарной обработки по правилу "2 из 4-х" и передачи выбранных команд и данных по линиям разветвления модулей МГ 17 в модули МПУ.
Структурная схема модуля приоритетного управления МПУ представлена на фиг. 6. Модуль МПУ выполняет управление ИМ по командам инициирования от нескольких центров управления: от контроллера КА СБ по линии связи 21 шины ШВВ СБ; от БПУ по проводным связям 101 и от РПУ по проводным связям 102. По связям 21, 211, 212 производится передача состояния ИМ, соответственно, в КА СБ, БПУ и РПУ. По шине ШВВ СБ 27 производится передача состояния модуля МПУ в КА СБ.
Формирование команд управления ИМ производится: по командам инициирования от КА СБ, БПУ и РПУ в программируемой логической схеме ПЛИС СБ 23. Команды управления ИМ от ПЛИС СБ 23 поступают в ПЛИС логики приоритетного управления - ПЛИС ЛПУ 24, в которой производится формирование команды, выдаваемой на ИМ в соответствии с приоритетами центров управления.
Контроллер КА СБ после передачи команды инициирования управления ИМ в модуль МПУ по линии связи 21 шины ШВВ СБ производит контроль выдаваемой на ИМ команды путем чтения ее по обратной связи с выхода ПЛИС ЛПУ 24 и сравнения ее с заданной командой. Если команда не соответствует заданной, то КА СБ 2, фиг. 1, регистрирует неисправность модуля МПУ и передает сообщение об этом по шине EN 5 на верхний уровень управления системы нормальной эксплуатации и по интерфейсам МПИ1 в БПУ и МПИ2 в РПУ, фиг. 2.
Структура контроллера автоматизации КА СБ на примере КА СБ канала 1 показана на фиг. 7. Процессорный модуль автоматизации ПМА СБ 27 контролера КА СБ принимает по шине ШВВ СБ 7 цифровые значения параметров процесса от модулей МСП станций CBB1-n своего канала безопасности, производит их обработку и при обнаружении аварийной ситуации в соответствии с алгоритмами безопасности формирует и выдает по шине ШВВ СБ 7 в модули МПУ станций СПУ1-m своего и других каналов безопасности команды управления защитными действиями. В процессе выполнения алгоритмов безопасности ПМА СБ 27 проводит обмен данными с ПМА СБ 2-го, 3-го и 4-го каналов безопасности, соответственно, по межпроцессорным интерфейсам МПИ 612, 613, 614 и производит мажоритарную обработку данных от всех каналов безопасности по правилу "2 из 4-х". По интерфейсам связи ПМА СБ 1-го канала безопасности с БПУ - МПИ1 1111 и с РПУ - МПИ2 1121, процессорный модуль принимает команды дистанционного управления от БПУ и РПУ и передает в БПУ и РПУ диагностическую информацию о выполнении алгоритмов защиты. По резервированной шине EN 51, 52 модуль ПМА СБ передает диагностическую информацию системы безопасности в систему нормальной эксплуатации.
Прием данных от станций СВВ и станций СПУ и передачу команд и данных в станции СПУ процессорный модуль ПМА СБ производит: по линиям связи шины ввода вывода ШВВ СБ 291 - 29p с коммуникационными модулями МР-4 281 - 28р, и далее по линиям связи 15 модулей МР-4 со станциями СВВ и по линиям связи 19 со станциями СПУ. Каждый коммуникационный модуль МР-4 по 4-м линиям связи может быть связан с 4-мя станциями СВВ своего канала безопасности, например CBB1-4, или с 4-мя группами из 4-х станций, например СПУ1-4, своего и 3-х других каналов безопасности. В качестве примера на фиг. 7 показаны подключения модуля МР-4 28p-1 1-го канала безопасности к 4-м станциям CBB1-4 этого канала и подключения модуля МР-4 282 1-го канала безопасности к группе станций СПУ1-4 этого канала и к группе станций СПУ1-4 в каждом из 3-х других каналов безопасности.
Коммуникационный модуль МР-4 28p-1 по линии связи 151 подключен к CBB1, по линии связи 152 - к СВВ2, по линии связи 153 - к СВВ3 и по линии связи 154 - к СВВ4 своего (1-го) канала безопасности.
Коммуникационный модуль МР-4 282 по линии связи 1911 подключен к 4-м станциям СПУ1-4 своего, т.е. 1-го канала безопасности, по второй линии связи 1912 - к 4-м станциям СПУ1-4 2-го канала безопасности, по линии связи 1913 - к 4-м станциям СПУ1-4 3-го канала безопасности и по линии связи 1914 - к 4-м станциям СПУ1-4 4-го канала безопасности. Аналогично подключены к этим 4-м группам станций СПУ1-4 коммуникационные модули МР-4 282 контроллеров КА СБ 3-х других каналов безопасности.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЯЮЩАЯ СИСТЕМА БЕЗОПАСНОСТИ АТОМНОЙ ЭЛЕКТРОСТАНЦИИ | 2015 |
|
RU2598599C1 |
| УПРАВЛЯЮЩАЯ СИСТЕМА БЕЗОПАСНОСТИ АТОМНОЙ ЭЛЕКТРОСТАНЦИИ | 2015 |
|
RU2582875C1 |
| СИСТЕМА АВАРИЙНОЙ ЗАЩИТЫ РЕАКТОРНОЙ УСТАНОВКИ | 2024 |
|
RU2831414C1 |
| КОМПЛЕКС РЕЗЕРВИРУЕМЫХ ПРОГРАММНО-АППАРАТНЫХ СРЕДСТВ АВТОМАТИЗАЦИИ КОНТРОЛЯ И УПРАВЛЕНИЯ | 2010 |
|
RU2430400C1 |
| Способ аварийной остановки реактора на основании состояния сигналов приборов,важных для безопасности АЭС | 2020 |
|
RU2743250C1 |
| КОМПЛЕКС ЭЛЕКТРООБОРУДОВАНИЯ СИСТЕМЫ УПРАВЛЕНИЯ И ЗАЩИТЫ ЯДЕРНЫХ РЕАКТОРОВ | 2014 |
|
RU2574289C2 |
| Дублированная шина для систем автоматизированного контроля и управления атомных станций и других промышленных объектов | 2021 |
|
RU2760299C1 |
| Устройство для обмена данными в вычислительной сети | 1988 |
|
SU1599864A1 |
| Радиолокационная станция кругового обзора | 2018 |
|
RU2691129C1 |
| БЕРЕГОВОЙ РАКЕТНЫЙ ПРОТИВОКОРАБЕЛЬНЫЙ КОМПЛЕКС | 2005 |
|
RU2285889C1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах автоматизированного контроля и управления АЭС для построения управляющих систем безопасности (УСБ) АЭС. УСБ содержит множество идентичных каналов безопасности, каждый канал включает станции ввода вывода сигналов технологического процесса, станции приоритетного управления исполнительными механизмами, контроллер автоматизации средств безопасности, шину ввода вывода средств безопасности и соединен с другими каналами безопасности с помощью перекрестных дуплексных оптоволоконных связей. Процессорный модуль автоматизации средств безопасности каждого канала безопасности соединен с ПМА СБ других каналов безопасности с помощью перекрестных связей, выполненных на основе межпроцессорных интерфейсов МПИ типа "точка-точка", построенных на базе интерфейса Ethernet и коммуникационного протокола уровня данных. Технический результат - повышение надежности многоканальной УСБ, устранение выдачи ложных команд управления и защиты на исполнительные устройства, повышение эффективности мажоритарного резервирования, расширение функций дистанционного управления и диагностирования с блочного и резервного пунктов управления и верхнего уровня системы нормальной эксплуатации, сокращение времени восстановления системы и повышение готовности. 2 з.п. ф-лы, 7 ил.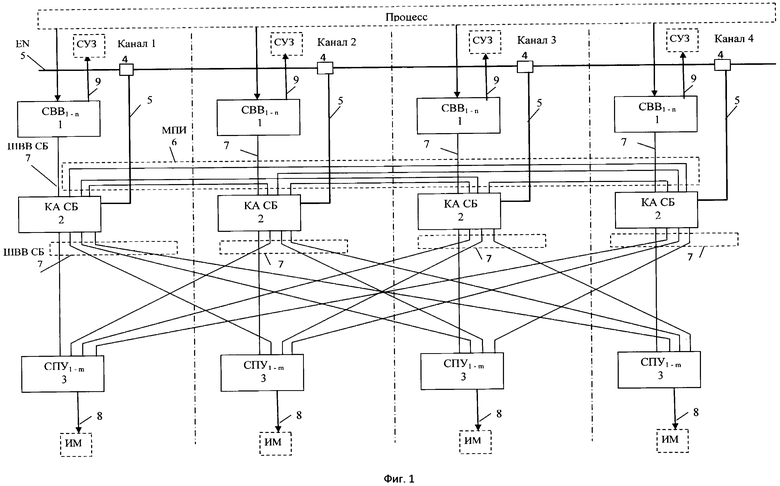
1. Управляющая система безопасности атомной электростанции, содержащая множество идентичных каналов безопасности, каждый канал включает станции ввода вывода сигналов технологического процесса CBB1-n, станции приоритетного управления исполнительными механизмами СПУ1-m, которые соединены с блочным пунктом управления БПУ и резервным пунктом управления РПУ, контроллер автоматизации средств безопасности КА СБ, шину ввода вывода средств безопасности ШВВ СБ обмена данными контроллера КА СБ со станциями СВВ и СПУ, и соединен с другими каналами безопасности с помощью перекрестных дуплексных оптоволоконных связей, отличающаяся тем, что станция СВВ содержит модули связи с технологическим процессом МСП1-k и коммуникационный модуль - преобразователь интерфейсов коммуникаций ПИК шины ШВВ СБ, станция СПУ содержит модули приоритетного управления исполнительными механизмами МПУ1-e и коммуникационные модули: модуль коммуникации голосования МКГ и модуль голосования МГ шины ШВВ СБ, контроллер автоматизации КА СБ содержит процессорный модуль автоматизации средств безопасности ПМА СБ и коммуникационные модули - модули разветвления MP-41-p шины ШВВ СБ, процессорный модуль автоматизации средств безопасности ПМА СБ каждого канала безопасности соединен с ПМА СБ других каналов безопасности с помощью перекрестных связей, выполненных на основе межпроцессорных интерфейсов МПИ типа "точка-точка", построенных на базе интерфейса Ethernet и коммуникационного протокола уровня данных, шина ШВВ СБ канала безопасности имеет структуру типа "дерева", верхним корневым узлом которого является ПМА СБ канала безопасности, нижними конечными узлами - модули связи с процессом МСП1-k станций CBB1-n и модули приоритетного управления МПУ1-е станций СПУ1-m своего канала безопасности и модули приоритетного управления МПУ1-е станций СПУ1-m других каналов безопасности, а промежуточными узлами являются коммуникационные модули: MP-41-p контроллера автоматизации, ПИК станций ввода вывода и МКГ, МГ станций приоритетного управления, связи между модулями, находящимися в узлах шины ШВВ СБ, выполнены в виде линий последовательного дуплексного интерфейса типа "точка-точка", межканальные линии связи между контролером автоматизации КА СБ каждого канала безопасности и станциями приоритетного управления МПУ1-e других каналов безопасности выполнены на оптоволоконных кабелях, каждый канал безопасности выполнен на одном процессоре, размещенном в процессорном модуле автоматизации ПМА, при этом мажоритарное резервирование по правилу выбора команд и данных "2 из N", где N - количество каналов безопасности, реализовано на двух уровнях межканального обмена: на уровне процессоров модулей ПМА СБ при получении процессором модуля ПМА СБ каждого канала безопасности команд и измеряемых параметров от процессоров модулей ПМА СБ других каналов безопасности по межпроцессорным интерфейсам МПИ и на уровне станций приоритетного управления в коммуникационных модулях МГ станций СПУ1-m при поступлении в СПУ1-m команд управления от процессоров модулей ПМА СБ всех каналов безопасности по шинам ШВВ СБ, в модулях МПУ станций СПУ выходы ПЛИС логики приоритетного управления исполнительными механизмами - ПЛИС ЛПУ подключены к входу ИМ и по обратным связям к контроллеру КА СБ канала безопасности через ПЛИС СБ и шину ШВВ СБ, выходы ИМ подключены к ПЛИС ЛПУ и через ПЛИС СБ к БПУ, РПУ и КА СБ, контроллеры КА СБ каналов безопасности соединены с БПУ и РПУ по межпроцессорным интерфейсам МПИ типа "точка-точка", выполненным на базе интерфейса Ethernet и коммуникационного протокола уровня данных, контроллеры автоматизации КА СБ всех каналов безопасности подключены к системе нормальной эксплуатации по резервированной шине EN, построенной на базе коммутируемого интерфейса Ethernet, кольцевой структуры соединения сетевых коммутаторов и коммуникационного протокола уровня данных.
2. Управляющая система безопасности атомной электростанции по п. 1, отличающаяся тем, что в станции СВВ каждого канала безопасности коммуникационный модуль ПИК шины ШВВ СБ по отдельным линиям связи ШВВ СБ соединен с контроллером автоматизации КА СБ канала безопасности и с каждым модулем МСП1-k.
3. Управляющая система безопасности атомной электростанции по п. 1, отличающаяся тем, что в каждом канале безопасности станции СПУ объединены в группы по N станций, количество станций СПУ определяется количеством каналов безопасности, первая станция группы СПУ1 по линии связи ШВВ СБ соединена с контроллером КА СБ своего канала безопасности, другие станции СПУ2-n группы соединены с контроллерами КА СБ других каналов безопасности N-1, коммуникационный модуль МКГ каждой станции СПУ соединен с коммуникационным модулем голосования по мажоритарному правилу «2 из N» МГ своей станции СПУ и коммуникационными модулями МГ других станций СПУ группы, коммуникационный модуль МГ каждой станции СПУ соединен по линиям связи ШВВ СБ с модулями приоритетного управления МПУ1-e этой станции.
| УПРАВЛЯЮЩАЯ ЦИФРОВАЯ СИСТЕМА БЕЗОПАСНОСТИ АТОМНОЙ ЭЛЕКТРОСТАНЦИИ И СПОСОБ ОБЕСПЕЧЕНИЯ ПАРАМЕТРОВ БЕЗОПАСНОСТИ | 2007 |
|
RU2356111C2 |

