Изобретение относится к симулятору пациента, в частности стимулятору недоношенного ребенка, новорожденного ребенка или ребенка, содержащему макет по меньшей мере одной части тела настоящего пациента.
Поскольку оказание помощи критически больному недоношенному ребенку или новорожденному ребенку является относительно редким событием, требующим быстрых, обдуманных и организованных действий медицинского персонала, оно по – прежнему приводит к проблемам в реализации медицинских манипуляций и согласованности действий в команде. Если при оказании помощи недоношенному или новорожденному ребенку, жизнь которого находится под угрозой, не осуществлять необходимых мероприятий, то это может оказать пожизненное влияние на дальнейшее его развитие. Поэтому именно в педиатрии проведение симуляционных тренингов является этически обязательным. Только так можно приобретать необходимые опыт и навыки для оказания помощи угрожающе больным недоношенным или новорожденным детям, без угрозы для жизни или здоровья пациентов. Требования к качеству современной медицины включают в себя также отработку редких случаев, с одной стороны, для спасения жизни, а с другой – для повышения качества жизни после неотложной ситуации.
Доступные в настоящее время на рынке куклы грудного ребенка и новорожденного ребенка не позволяют имитировать многие патологии, вследствие своих небольших размеров и, в частности, необходимости миниатюризации технических элементов и элементов управления. Более того, у таких манекенов зачастую не хватает приближенности к реальности, поэтому отработанные на кукле манипуляции в реальности автоматически не улучшают действия.
В публикации W02012 / 155283A1 описан симулятор легких, оснащенный по меньшей мере одной воздушной камерой, выполненной, например, в виде по меньшей мере силиконового сильфона для насколько возможно лучшей симуляции функций легких при болезни, а также в здоровом состоянии. Недостатком известной из W02012 / 155283A1 модели легких является невозможность ее установки, вследствие своего размера внутри естественного симулятора (куклы) и ее расположение снаружи куклы.
Поэтому целью данного изобретения является совершенствование симулятора пациента, в частности симулятора недоношенного ребенка, в том отношении, чтобы повысить приближение к реальности и обеспечить имитацию самых различных патологических состояний, даже при малогабаритном исполнении симулятора недоношенного ребенка.
Для решения этой задачи, согласно первому аспекту изобретения, предусматривается симулятор пациента, в частности, недоношенного ребенка, новорожденного ребенка или ребенка, содержащий макет грудной клетки, симулятор легких и проходящий к симулятору легких макет трахеи, причем макет грудной клетки содержит по меньшей мере один элемент грудной клетки, выполненным с возможностью подъема и опускания для имитации подъема и опускания грудной клетки, причем указанный по меньшей мере один поднимаемый и опускаемый элемент грудной клетки взаимодействует с устройством подъема и опускания, управляемым независимо от симулятора легких.
Таким образом, в основе изобретения лежит задача создания симулятора легких и имитации подъема и опускания грудной клетки по меньшей мере как отдельных по функциональности устройств, с возможностью их отдельного друг от друга управления для осуществления процессов имитации. Под симулятором легких следует понимать в публикации имитацию основных механических параметров дыхания человека, в частности, сопротивление потоку дыхательных путей (сопротивление) и растяжимости легкого (эластичность). В простейшем случае симулятор легких содержит пневматическое последовательное соединение сопротивления и эластичности. Симулятор легких служит для симуляции различных состояний легких пациента, например, в отношении сопротивления и растяжимости, что, в частности, имеет большое преимущество для тренировки машинного искусственного дыхания с помощью симулятора пациента на реальных аппаратах искусственного дыхания. Для обеспечения в этой связи эндотрахиальной интубации, симулятор пациента содержит согласно изобретению проходящий к симулятору легких макет трахеи, а также предпочтительно анатомический макет гортани.
Говоря об обычных исполнениях симуляторов пациента, речь идет о пневматической модели легких, в большинстве случаев, об эластичной пустотелой детали, соединенной с источником давления для самопроизвольного дыхания, для периодического заполнения воздухом и его выпуска из пустотелой детали в соответствии с симулируемым дыханием, вследствие чего пустотелая деталь периодически расширяется и сжимается. Макет грудной клетки выполнен в обычных вариантах с элементом грудной клетки, выполненным с возможностью подъема и опускания, под которым расположена эластичная пустотелая деталь симулятора легких, поэтому подъем грудной клетки происходит посредством давления расширяющейся пустотелой детали, а опускание грудной клетки – при возврате в исходное положение за счет упругости элемента грудной клетки или пустотелой детали. Таким образом, движение грудной клетки непосредственно привязано к имитации самопроизвольного дыхания и искусственному дыханию симулятора легких.
В противоположность этому, подъем и опускание грудной клетки в предложенном согласно изобретению варианте можно симулировать независимо от состояния в данный момент симулятора легких, так как по меньшей мере один поднимаемый и опускаемый элемент грудной клетки приводится в движение симулятором легких механически или физически независимым от него устройством подъема и опускания. Таким образом, симулятор легких и система для подъема и опускания грудной клетки выполнены по меньшей мере как отдельные по функциональности устройства, с возможностью управления ими для осуществления процессов имитации отдельно друг от друга. Благодаря этому, можно реалистично имитировать не только физиологически обычные состояния, но и различные патологические состояния и создавать расширенные возможности тренировки для участников тренинга. Кроме того, возникает возможность располагать симулятор легких или отдельные его компоненты в другом месте, а не непосредственно под поднимаемым и опускаемым элементом грудной клетки, что облегчает компактность компоновки.
Предпочтительный вариант исполнения изобретения предусматривает в этой связи, что симулятор легких расположен внутри макета грудной клетки и/или внутри макета живота. В частности, симулятор легких или его отдельные компоненты могут располагаться внутри макета живота.
Независимое управление механизмом подъема и опускания создает другое преимущество в том, что движения подъема и опускания могут отображаться простым способом на экране устройства, например, на графическом пользовательском интерфейсе персонального компьютера. Для этого графический пользовательский интерфейс содержит, предпочтительно, графическое изображение симулируемого пациента, причем графический пользовательский интерфейс взаимодействует с симулятором пациента или с управляющим им устройством управления так, что на графическом пользовательском интерфейсе изображается подъем и опускание грудной клетки изображаемого пациента, синхронное с подъемом и опусканием грудной клетки, вызываемым механизмом подъема и опускания симулятора пациента.
Для имитации физиологически обычных состояний дыхательной системы, в частности, легких, устройством подъема и опускания макета грудной клетки управляют так, что по меньшей мере один элемент грудной клетки, выполненный с возможностью подъема и опускания, поднимается и опускается синхронно с наполнением воздухом симулятора легких и его выпусканием. Это, в частности, имеет место при осуществлении упражнений искусственного дыхания с симулятором пациента по меньшей мере например, при упражнениях искусственного дыхания с маской и дыхательным мешком. Симулятором можно осуществлять искусственное дыхание, предпочтительно, тогда, когда голова располагается в нейтральном положении, а маска искусственного дыхания правильно уплотнена. Если затем в симуляторе грудная клетка поднимается, то пользователю становится очевидной эффективность проведения им искусственного дыхания (в соответствии с реальностью). Для технической реализации такой имитации предпочтительно предусмотрено, что симулятор легких имеет по меньшей мере одну полость, предпочтительно две полости, в частности, одну для имитации правой половины легких, а другую - для имитации левой половины легких, выполненных с возможностью их наполнения воздухом, предпочтительно, через макет трахеи из аппарата искусственного дыхания, причем в полости или в полостях предусмотрены датчики давления. Сигналы датчика или датчиков давления поступают предпочтительно в устройство управления для управления устройством подъема и опускания по меньшей мере макета грудной клетки для подъема и опускания элемента грудной клетки, выполненного с возможностью подъема и опускания, в зависимости от сигналов давления. Датчики давления предпочтительно расположены и выполнены для определения давления и объема искусственного дыхания. По меньшей мере одна полость симулятора легких, выполненная предпочтительно как полость с жесткими стенками, выполнена c этой целью предпочтительно с возможностью регулировки объема. Объем можно динамично согласовывать в соответствии с физическими исходными данными растяжимости и сопротивления. Например, расчет актуального объема базируется на согласованном алгоритме в микроконтроллере. Для регулировки физиологических и патологических дыхательных параметров симулятора легких предусмотрен предпочтительно электрический привод.
Альтернативно легкое можно выполнять также пассивным. Для этого камеру выполняют гибкой, например, в виде камеры с одной открытой стороной, перекрываемой гибкой мембраной. При этом растяжение мембраны в зависимости от давления искусственного дыхания вызывает имитацию дыхательного объема. Растяжимость легкого можно подгонять к реально сравнимому эквиваленту при выборе толщины, материала или возможности регулирования натяжения мембраны.
Что касается имитации патологических состояний, кислородное голодание имеет особое значение. При кислородном голодании затруднено эффективное дыхание и вентиляция легких. Вследствие пониженного давления в легких, очень плохо заполняемых воздухом, диафрагма будет притягиваться в направлении к грудной клетке. Грудная клетка едва поднимается и заметно опускается при напряжении диафрагмы. Вследствие этого возникает впечатление маятникообразного дыхания или парадоксального дыхания, так как грудная клетка при вдыхании опускается, а при выдыхании заметно поднимается. Это впечатление еще более усиливается встречным движением живота. Имитация маятникообразного дыхания обеспечивается в рамках изобретения независимым от симулятора легких управлением устройства подъема и опускания по меньшей мере одного элемента грудной клетки, выполненного с возможностью подъема и опускания, причем блок управления устройства подъема и опускания выполнен так, чтобы поднимать указанный по меньшей мере один элемент грудной клетки, если симулируют выдох, и опускать его, если симулируют вздох. Дополнительно может быть предусмотрено, что макет живота симулятора пациента, выполнен с возможностью подъема и опускания пластины живота, приводимой в движение устройством подъема и опускания макета живота. Визуального впечатления маятникообразного дыхания достигают посредством того, что пластина живота во время вздоха поднимается и одновременно опускается грудная клетка, и пластина живота при выдохе опускается и одновременно поднимается грудная клетка.
Кроме того, с помощью предлагаемого симулятора пациента можно симулировать пневмоторакс. Пневмоторакс является опасным осложнением недоношенного ребенка. При этом возникает разрыв в легком, а вместе с ним - острая неотложная ситуация. Это распознается по такому признаку, что грудная клетка на соответствующей стороне больше уже не поднимается. Предпочтительный вариант исполнения имитации пневмоторакса предусматривает наличие по меньшей мере одного правого поднимаемого и опускаемого элемента грудной клетки для правой половины грудной клетки и по меньшей мере одного левого поднимаемого и опускаемого элемента грудной клетки для левой половины грудной клетки, выполненных с возможностью подъема и опускания отдельно друг от друга и соответственно взаимодействующих с собственным управляемым устройством подъема и опускания, причем устройство подъема и опускания для правого элемента грудной клетки и устройство подъема и опускания для левого элемента грудной клетки могут управляться независимо друг от друга. Благодаря компоновке устройств подъема и опускания для правой и левой половины грудной клетки можно простым способом симулировать пневмоторакс, как при естественном дыхании, так и при любом виде искусственного дыхания. Для этого управляют только одним из обоих устройств подъема и опускания (справа или слева). В результате получают подъем грудной клетки на одной стороне, что хорошо распознается участниками тренировки как односторонний пневмоторакс.
Предпочтительный вариант исполнения предусматривает, что устройство (устройства) подъема и опускания расположено (расположены) в макете грудной клетки, в частности под указанным по меньшей мере одним элементом грудной клетки, выполненным с возможностью подъема и опускания.
Устройство подъема и опускания может приводиться в движение в принципе, как угодно, например, пневматически, гидравлически или электрически. Предпочтительно, если подъем и опускание элемента грудной клетки осуществляют с помощью электромотора, для чего устройство (устройства) подъема и опускания имеет соответственно блок приводного устройства с электромотором, содержащий, предпочтительно, рычаг с возможностью выполнения поворота. Поворотный рычаг создает возможность компактного варианта исполнения устройства подъема и опускания и одновременно обеспечивает подъем и опускание с относительно большим ходом.
В отношении симулятора легких предпочтительно предусмотрено, что он имеет по меньшей мере один регулировочный элемент для регулировки растяжимости и сопротивления. Подстройку легкого можно выполнять, в частности, посредством камеры с жесткими стенками, с поршнем, управляемым и определяющим объем камеры, который может изменять подстроенный легочный объем в зависимости от давления и времени, причем, посредством изменения подвода давления к поршню можно регулировать как растяжимость, так и сопротивление. Предпочтительно, если поршень нагружен давлением пружинного элемента, создающим так называемую основную растяжимость, в частности, пружинный элемент обуславливает пассивное удерживание давления в симуляторе легких. Для изменения подвода давления к поршню может быть предусмотрен пружинный элемент, взаимодействующий с поршнем и с возможностью изменения предварительного натяжения. Для изменения объема камеры может предусматриваться взаимодействующий с поршнем, в частности, электромоторный или электромагнитный привод. Предпочтительно, если привод образован линейным двигателем.
В упрощенной, альтернативной системе управления легкими биологические параметры растяжимости и сопротивления регулируют, предпочтительно, автономно друг от друга и имеется по меньшей мере один соответственно элемент управления растяжимостью и сопротивлением. В этой предпочтительной форме исполнения изобретения для управления растяжимостью, эластичность создают разным натяжением легочной стенки симулятора. Регулирование противодействия дыхательных путей (сопротивление) регулируют автономно, с помощью юстируемого или быстро включающегося клапана для регулировки сопротивления воздуха.
Для реализации подстройки повышения оксигенизации при синдроме сурфактантной недостаточности после подачи сурфактантного препарата или подстройки этого медикамента жидкостью, в макете грудной клетки, в частности, в макете дыхательных путей, предпочтительно, в макете трахеи предусмотрен датчик. Предпочтительно, если датчик вделан в стенку макета дыхательных путей с возможностью его замены и содержит адсорбирующий жидкость материал, в частности, пенный материал и интегрированный в материал датчик влажности. Датчик обнаруживает впрыскивание жидкости по меньшей мере например, сурфактантного препарата, в дыхательные пути и/или легкое, в то время, как сухой материал, в частности, пенный материал поглощает жидкость и изменяет вследствие этого его электропроводящее свойство. Как только обнаруживается подача сурфактантного препарата, симулятор пациента показывает изменение патологических параметров и соответственно понижает с изменением по времени величины растяжимости и сопротивления симулятора легких в соответствии с клинической реальностью.
Дополнительно к сенсорной функции сурфактантных датчиков, датчик с пенным материалом выполняет функцию грязевого фильтра для симулятора легких и создает возможность при замене датчика прочищать дыхательный путь посредством промывания с помощью жидкого моющего средства над очистительной пробкой.
В соответствии с этим заменяемый датчик влажности с заполнителем из пенопласта интегрирован в дыхательном пути соответственно для обнаружения жидкостей и фильтрования вдыхаемого воздуха.
Для более реалистичного изображения кислородного голодания симулируют так называемое межреберное втяжение кожи. При кислородном голодании вдох затруднен. При возникающем в грудной клетке при вдохе пониженном давлении кожа и ткань втягиваются к более неподвижным частям (скелету) на гибких участках. Это прежде всего заметно на участке межреберного пространства ("интеркосталь"). Предпочтительный вариант исполнения изобретения предусматривает в этой связи, что по меньшей мере один элемент грудной клетки, поднимаемый и опускаемый, содержит множество макетов ребер, а макет грудной клетки содержит макет кожи, покрывающий макеты ребер и который может подниматься и опускаться вместе с указанным по меньшей мере одним элементом грудной клетки, поднимаемым и опускаемым, причем на указанном по меньшей мере одном элементе грудной клетки, выполненном с возможностью подъема и опускания, фиксировано воздействующее на макет кожи средство натяжения или давления в виде, например по меньшей мере одной нити или стержневого элемента тяги, и указанный по меньшей мере один элемент грудной клетки, выполненный с возможностью подъема и опускания, несет приводной элемент, в частности, электромотор для перемещения средства натяжения, вызывающего межреберное втяжение макета кожи. Вследствие того, что приводной элемент для перемещения средства натяжения расположен или фиксирован на элементе грудной клетки, выполненном с возможностью подъема и опускания, приводной элемент перемещается вместе с ним при симулированных при искусственном дыхании (дыхании) перемещении подъема и опускания элемента грудной клетки, поэтому имитация межреберного втяжения может осуществляться независимо от фактического положения подъема элемента грудной клетки.
В другой форме исполнения изобретения втяжение можно создавать электромагнитным действием за счет вделанных в кожу магнитных элементов, притягиваемыми синхронно с дыханием катушками электромагнита в по меньшей мере одном межреберном пространстве.
Кроме того, предпочтительно может быть предусмотрено, что симулятор пациента выполнен для имитации патологического состояния некротирующего энтероколита. Некротирующий энтероколит (NEC) является в настоящее время драматично протекающим заболеванием кишки, осложнением, которого боятся при лечении недоношенных детей. Оно представляет собой в этой группе пациентов самое частое острое заболевание желудочно-кишечного тракта, отчасти, с драматическими последствиями для недоношенного ребенка. При пониженном кровоснабжении (снижение перфузии) кишечной стенки в связи с инфекцией при NEC происходит гибель ткани (омертвение) в кишечной стенке. Это происходит в большинстве случаев на участке конечных отрезков подвздошной кишки и ободочной восходящей кишки, и этому часто сопутствует образование газов, образующихся при гниении в кишечной стенке (пневматоз кишечника). С увеличением поражения кишечная стенка может перфорироваться, и это приводит к выходу кишечного содержимого в открытую брюшную полость. Последствием являются воспалительная реакция, перитонит и сепсис.
Клинический признак некротизирующего энтероколита является частично усиленно вздутый живот с расширенными кишечными петлями, недостающая перистальтика, а вследствие этого отсутствующие кишечные шумы. Локальная инфекция с выходом кишечного содержимого создает землистое (белое, сероватое, синеватое) изменение цвета кожи живота и к выступанию рисунка вен на этом участке разного проявления. Последствия кишечного вздутия, а вместе с ним всего живота приводят иногда к полному ограничению самопроизвольного дыхания, так как чрезмерно вздутый живот прижимает легкое вверх к грудной клетке и, в частности, сжимает его. Вследствие этого часто самопроизвольное дыхание полностью нарушается. Поэтому недоношенные дети с тяжелым NEC часто должны быть неотложно интубированы и им нужно проводить искусственное дыхание механическим способом.
Для имитации NEC симулятор пациента выполнен для осуществления следующих процессов. Имитацию вздутия и затвердевания живота осуществляют посредством подъема пластины живота. Для этого пластину живота устанавливают и фиксируют в его максимальном положении. При прикладывании усилия снаружи, предпочтительно, чтобы привод подъема пластины живота оказывал максимальное, с возможностью регулирования, противодействие для симуляции затвердевания. Одновременно с помощью физиологических систем регулирования макета легких предпочтительно осуществляют снижение растяжимости легкого. Легочный объем уменьшается и для искусственного дыхания становится необходимым более высокое давление искусственного дыхания. Предусмотренную при необходимости реализацию изменения цвета симулятора предпочтительно осуществляют посредством цветных светодиодов, освещающих макет кожи симулятора в области живота изнутри и мерцающих нужным цветом. Эти светодиоды могут смешивать основные цвета - красный, зеленый и синий цвета – в соответствии с предварительным заданием для выравнивания возможных изменений цвета в силиконовой коже. Для имитации выступающего сосудистого рисунка сосуды на внутренней стороне макета кожи раскрашивают с покрытием или вделывают в стенку макета кожи. При натянутой коже эта имитация сосудов становятся затем заметна при прямом или рассеянном освещении подъемной пластины посредством светодиодов.
Независимый, второй аспект данного изобретения, который можно комбинировать с каждым из любых других аспектов изобретения, предусматривает в этой связи симулятор пациента, в частности, симулятор недоношенного ребенка, содержащий симулятор легких и макет живота, содержащий пластину живота, выполненную с возможностью подъема и опускания и приводимую в движение устройством подъема и опускания, причем устройство управления выполнено для подъема пластины живота и одновременного увеличения противодействия искусственному дыханию легочной модели.
Предпочтительно, если для этого предусмотрено, что макет живота, включая пластину живота, перекрывается макетом кожи, внутренняя сторона которого может освещаться расположенными в макете живота осветительными средствами.
Кроме того, предлагаемый согласно изобретению симулятор пациента может быть выполнен для симуляции симптома "кивательного гиперкинеза головы", признака повышенной дыхательной работы у недоношенных и новорожденных детей. При этом уменьшение растяжимости легкого приводит при активности вспомогательной дыхательной мускулатуры на участке головы (грудинно – ключично - сосцевидной мускулатуры) к резким, синхронным с дыханием движениям вперед головы с каждым вдохом. Для имитации этого симптома может быть предусмотрен серводвигатель или сопоставимый приводной элемент, изменяющий при посредничестве рычажной передачи или сопоставимого гибкого исполнительного элемента в виде гибкой тяги, угол между макетом головы и макетом грудной клетки. Это движение синхронизируется предпочтительно посредством центрального управления с функционированием дыхания.
Техническую реализацию кивательного гиперкинеза головы осуществляют, например, с помощью более чем двух боуденовских тросиков, проходящих симметрично в левой и правой стороне макета дыхательных путей, а также благодаря противодействующему усилию натянутых силиконовых компонентов симулятора.
Третий, независимый аспект данного изобретения, который можно комбинировать с каждым из любых других аспектов изобретения, предусматривает в этой взаимосвязи симулятор пациента, в частности, симулятор недоношенного ребенка, содержащий симулятор легких, макет грудной клетки, содержащий выполненный с возможностью подъема и опускания элемент грудной клетки, приводимый в движение устройством подъема и опускания, и макет головы, взаимодействующий с механизмом наклона для изменения угла между макетом головы и макетом грудной клетки, причем устройство управления устроено так, чтобы приводить в движение механизм наклона для периодического движения наклона макета головы, причем периодическое движение наклона синхронизировано с движением подъема и опускания элемента грудной клетки.
Согласно четвертому, независимому аспекту изобретения, который можно осуществлять при необходимости в симуляторе пациента согласно первому, второму или третьему аспекту изобретения, предусмотрен симулятор пациента, в частности, недоношенного ребенка, новорожденного ребенка или ребенка, содержащий макет головы, содержащий макет черепа, покрытый макетом кожи, причем по меньшей мере один источник света расположен в макете черепа или на нем. Благодаря ему, можно имитировать изменение цвета кожи или макета кожи на участке головы. В случае изменения цвета на синий можно симулировать, например, синюшность. Синюшность показывает сниженное насыщение крови кислородом и может быть симптомом угрожающего жизни расстройства при остром проявлении. Недоношенные и новорожденные дети имеют еще в первые жизненные минуты после рождения физиологическую синюшность. Она проявляется прежде всего на участке головы и туловища. Кроме того, с возрастающей эффективностью дыхания синюшность исчезает в первые минуты жизни. Если она по –прежнему сохраняется, то это может быть важным признаком патологического состояния. Она может относится как к дыханию, так и к сердечной функции и функции кровообращения (врожденный порок сердца). Наряду с этим, источник света может симулировать также красную окраску - покраснение головы, возникающее, например, при гипоксии, то есть при избытке кислорода и связанным с ним увеличением парциального давления кислорода в крови. Вследствие этого, при оказании помощи недоношенному и новорожденному ребенку синюшность и гипоксия вместе являются решающими клиническими параметрами, значительно влияющими на действия оказывающей медицинскую помощь команды.
Вследствие того, что по меньшей мере один источник света расположен в макете черепа или на нем, свет не падает непосредственно на макет кожи, что приводило бы только к точечному, ограниченному по месту световому эффекту на коже, а вследствие цветопередачи в макете черепа в нем создается распределение света, благодаря чему изнутри относительно равномерно освещается больший участок поверхности макета кожи. Это создает реалистичную имитацию изменения цвета кожи симулятора пациента. В противоположность этому, непосредственное расположение источников света, например, светодиодов, под кожей привело бы, в частности, к отчетливому, но в целом, - к нереальному изображению. Точечная синюшность в месте расположения источников света, например, на щеках или во рту, не была бы физиологически правильной и выглядела бы неестественной.
Предпочтительная форма исполнения изобретения предусматривает, что по меньшей мере один источник света образован красно – зелено – синим (КЗС) светодиодом, цветовыми каналами которого можно управлять независимо друг от друга по отдельности. Применение многоцветных КЗС светодиодов позволяет просто реализовывать разные цветовые нюансы. Такие светодиоды располагают, предпочтительно, более чем тремя отдельными светодиодными элементами разного цвета. Для перекрытия всего спектра видимого света (а вместе с ним, прежде всего, разных нюансов синюшности и гипоксии) дополнительно предпочтительно смешивают три светодиодных цвета: красный, зеленый и синий светодиодного источника. Благодаря разработкам в области микроэлектроники в настоящее время в распоряжении имеются различные возможности для управления светодиодами КЗС, начинающиеся от применения комбинаций отдельных светодиодных конструктивных элементов с прерывистым управлением до высоко-интегрированных структурных элементов с цифровой управляющей шиной для регулировки цветовой температуры. Другим преимуществом светодиодов КЗС является возможность компактной конструкции множества осветительных элементов, в частности, если они последовательно подключены друг к другу с помощью последовательной шины. При последовательном кабельном соединении необходима только управляющая шина для программирования модулей, причем последовательный информационный сигнал состоит соответственно, например, из 8 бит цвета каждого светового модуля, а информация передается всеми модулями. Благодаря этому получается так, что, в соответствии с количеством модулей создается такое же количество 3 битов цвета для обеспечения всех модулей в цепи цветовой информации.
Весь цветовой охват светодиодов КЗС содержит предпочтительно > 4 млн., в частности, > 16 млн. возможных цветов и содержит, благодаря этому, весь видимый цветовой спектр от белого до черного цвета. Вследствие этого просто удается при выборе цвета реалистичная окраска макета кожи. Для управления регулировкой цвета и обмена данными предусмотрен, предпочтительно, собственный микроконтроллер, получающий от главного блока управления команды управления и передающий их на отдельные светодиоды КЗС.
Для реализации изменения цвета кожи в области лба макета головы, предпочтительно, если источник света расположен на внутренней поверхности черепной крышки макета черепа. Достигнутое, благодаря этому, опосредованное освещение внутри макета черепа приводит к однородному, равномерному светораспределению. Для этого может приклеиваться светодиодный модуль, предпочтительно, в середине на основании черепа, тем самым освещающий опосредовано внутреннюю часть черепной крышки. Отражение появляющееся через макет черепа, выполненный предпочтительно в белом цвете, будет однородно освещать, вследствие этого, всю область лба и боковые участки черепа. В комбинации с освещением щек это приводит к равномерному освещению всей верхней области головы. В результате получается в высшей степени реалистичное изображение синюшности и гипоксии на участке головы.
Для реализации изменения цвета кожи в носовой области рта макета головы предпочтительно, если источник света расположен в макете черепа, подсвечивая изнутри среднюю полость черепа. При непосредственном освещении черепных костей макета черепа из внутренней части макета черепа, в области средней полости черепа, происходит однородное и реалистичное светораспределение, излучаемое на граничащих поверхностях между макетом черепа и макетом кожи. Это создает в высшей степени реалистичную окраску на участке носовой области рта. Также, принимая во внимание серийное производство, освещение костей внутренней части черепа дает заметное преимущество. В частности, световые модули защищены благодаря этому от любой механической нагрузки и их можно легко конструировать и заменять. Наряду с хорошим светораспределением и преимуществами для серийного производства и прочностью, кроме того, сокращается потребления электроэнергии для источника света, так как при таком способе отсутствуют потери энергии при подключении световода через устройство сопряжения.
Однородного освещения макета кожи достигают, предпочтительно, посредством того, что макет черепа состоит из полимерного, просвечивающего, в частности белого, материала, а макет кожи выполнен прозрачным или просвечивающим, в частности из силиконового материала.
Применение световодов предпочтительно для освещения трудно доступных участков, например, зоны рта и подбородка, вследствие ограниченных доступных пространств. Доступные пространства ограничены, в частности тогда, когда макет головы содержит макет верхних дыхательных путей. Предпочтительный вариант исполнения предусматривает в этой связи, что источник света соединен со световодом, проходящим дугообразно в области подбородка макета головы и выполненным с возможностью излучения света вдоль дуги, причем излучающий свет дугообразный участок световода предпочтительно расположен между макетом кожи и макетом дыхательных путей или нижней челюстью. При этом излучение в дугообразном участке достигается, предпочтительно, за счет шероховатости и/или просечки наружной поверхности световода. Благодаря этому, достигается, кроме того, рассеянное и плоскостное излучение. Предпочтительно, световод расположен так, что излучающий свет дугообразный участок проходит параллельно макету нижней челюсти.
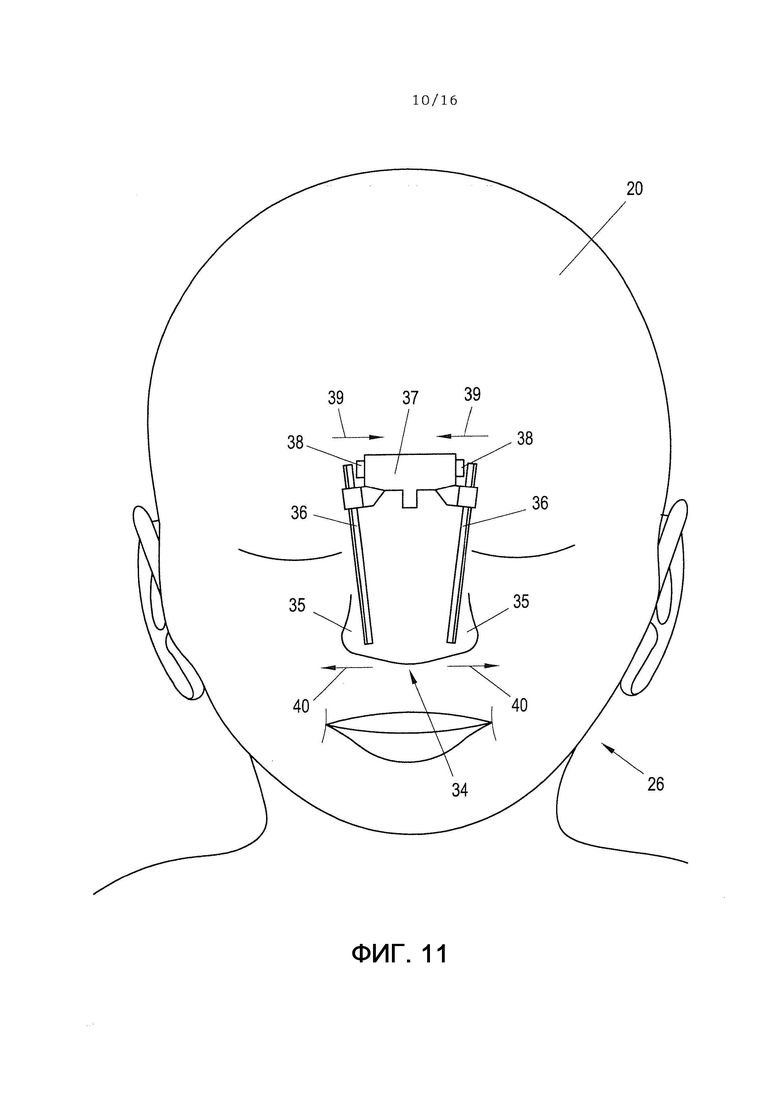
Согласно пятому, независимому аспекту изобретения, который можно при необходимости осуществить в симуляторе пациента согласно одному из предшествующих аспектов изобретения, предусмотрен симулятор пациента, в частности, недоношенного ребенка, новорожденного ребенка или ребенка, содержащий макет головы с макетом носа с двумя гибкими крыльями носа, причем в крылья носа входит проходящий во внутреннюю часть макета головы приводной элемент, в виде, например, по меньшей мере одной нити или рычага, для симуляции расширения и сужения крыльев носа. Так называемые "крылья носа" показывают синхронное с дыханием расширение крыльев носа при вдохе и изображают симптом кислородного голодания.
Приведение в движение крыльев носа осуществляют предпочтительно посредством взаимодействия рычажного механизма с приводным элементом, например, с электромагнитом для движения рычага. Для этого рычажный механизм сконструирован так, что при включении электромагнита противоположные концы рычага передвигаются в противоположном направлении и при притягивании рычага к магниту концы оттопыриваются в крыльях носа. Вследствие этого при активизации магнита происходит расширение ноздрей. Деактивация электромагнита приводит к возврату в исходное положение крыльев носа, благодаря эластичному выполнению крыльев носа с помощью соответствующего полимерного материала.
Синхронного с дыханием движения крыльев носа достигают предпочтительно посредством того, что предусмотрено центральное устройство управления, выполненное с возможностью управления механизма подъема и опускания макета грудной клетки и для управления приводного элемента крыльев носа так, что расширение крыльев носа и подъем по меньшей мере одного поднимаемого и опускаемого элемента грудной клетки осуществляются синхронно.
Шестой, независимый аспект изобретения относится к другой проблеме, существующей в симуляторах пациента. Для оценки легкого и сердца, а также живота в целях тренировки предпочтительна возможность прослушивания шумов с помощью стетоскопа. В обычных симуляторах пациента это осуществляют при установке динамиков на участке соответствующих органов. Однако это имеет заметные недостатки. В большинстве случаев речь идет только об одном динамике для сердца, двух динамиков для легкого, а, при необходимости, одного динамика для кишечных шумов в животе. Это приводит к тому, что пользователь должен точно попадать на незаметный снаружи динамик, для получения возможности отчетливого прослушивания шумов. Но даже тогда, когда пользователь попадает в положение нужного динамика, в большинстве случаев также можно слышать посторонние шумы механизмов симулятора, вводящие в заблуждение и не обеспечивающих в конечном счете корректное прослушивание.
Для преодоления этих недостатков, согласно шестому, независимому аспекту изобретения, который можно реализовать при необходимости в симуляторе пациента согласно одному из предшествующих аспектов изобретения, предусмотрен симулятор пациента, в частности, недоношенного ребенка, новорожденного ребенка или ребенка, содержащий макет грудной клетки, макет живота, симулятор стетоскопа и генератор звука, причем макет грудной клетки и макет живота имеют по меньшей мере два датчика расстояния, взаимодействующие с головкой стетоскопа симулятора стетоскопа для определения положения головки стетоскопа, причем полученные данные положения передают генератору звука, причем генератор звука имеет запоминающее устройство для аудиофайлов и устройство обработки для смешивания аудиофайлов в зависимости от данных положения, в смешанный звуковой сигнал, подаваемый в наушник симулятора стетоскопа.
Под датчиком расстояния понимают датчик, выдающий сигнал, пропорциональный расстоянию, в частности сферическому расстоянию между датчиком и головкой стетоскопа. Положение головки стетоскопа можно определять из исходных данных о расстоянии, предпочтительно, с помощью математической трингуляции для получения данных положения. При этом расчет данных положения осуществляют из данных расстояния либо в макете пациента, либо снаружи. Генератор звука располагают, предпочтительно, снаружи макета пациента. Таким образом, в основе изобретения лежит идея генерировать прослушиваемые шумы не в симуляторе пациента, а в симуляторе пациента только регистрировать положение стетоскопа, а шумы создавать в соответствии с положением в самом стетоскопе или в наружном устройстве.
Предпочтительно, если предусмотрено, что симулятор имеет передатчик ближнего поля, а стетоскоп - резонансный контур приемника. При этом передатчик ближнего поля симулятора производит электромагнитное ближнее поле с заданной частотой. Например, используется определенная несущая частота например, 100 кГц.
В самом симуляторе находятся катушки передатчика, настроенные на несущую частоту. В зависимости от удаления до приемника изменяется резонансная частота и амплитуда в соответствующем колебательном контуре. Полученные таким способом данные о расстоянии, представленные амплитудой и частотой, обрабатываются для определения положения, а результат передают в генератор звука, в то время как устройство обработки обеспечивает смешение (микширование) аудиофайлов, в зависимости от положения, в общий звуковой сигнал, подаваемый в наушник симулятора стетоскопа. Данные о расстоянии или положении могут подаваться в генератор звука, предпочтительно, в виде аналоговых сигналов, так чтобы можно было взвешивать громкость аудиофайлов, таких как шумы половин легких, сердца, живота, а также искусственных посторонних шумов в зависимости от правильного, гладкого положения стетоскопа, и смешивать аудиофайлы в результирующий звуковой сигнал. Поэтому для участника обучения создается ситуация, когда при позиционировании симулятора стетоскопа на левой грудной клетке, будет примешан отчетливый легочный шум, и при близком к сердцу позиционировании, будут примешаны отчетливые тоны сердца.
Альтернативно может быть предусмотрено, что передатчик ближнего поля расположен в стетоскопе и схема приемника в симуляторе. Соответственно использование передатчика и приемника взаимозаменяемо, в зависимости от их применения.
Генератор звука может быть расположен либо в макете стетоскопа симулятора стетоскопа, либо во внешнем устройстве, отдельном от макета пациента симулятора пациента и симулятора стетоскопа. Звуковой сигнал, микшированный с помощью генератора звука, расположенного во внешнем блоке, может передаваться, предпочтительно, посредством беспроводной передачи данных, например по блютузу, в приемное устройство симулятора стетоскопа, и поэтому прослушиваться без неприятных посторонних шумов через интегрированный наушник.
Предпочтительный вариант исполнения предусматривает, что для каждого положения на макете грудной клетки и макете живота, микшированным является по меньшей мере один звуковой сигнал, представляющий шумы данного тела в соответствующем положении. При этом шумы, взвешенные в зависимости от положения головки стетоскопа, микшируются из по меньшей мере одного записанного аудиофайла и испускаются в стетоскоп.
При этом отдельные аудиофайлы представляют соответственно симулируемый источник шума, например, сердечный шум, легочный шум, шум живота и т.д., и поэтому соответствуют положению соответствующего источника шума. Кроме того, устройство обработки предпочтительно выполнено так, чтобы аудиофайл добавлялся к микшированному сигналу с громкостью, которая тем больше чем меньше расстояние головки стетоскопа от положения, ассоциированного с этим аудиофайлом или указанного симулируемого источника шума.
При генерировании микшированного звукового сигнала дополнительно к информации о положении могут учитываться и другие параметры. Например, предпочтительно, если сердечный шум адаптируют настолько, что он показывает частоту сердечных сокращений. То же относится к легочным шумам для частоты дыхания. Кроме того, шумы могут естественно изменяться в зависимости от патологических состояний.
Предпочтительный вариант исполнения изобретения предусматривает в этой связи, что каждый аудиофайл с физиологическим шумом можно заменять на аудиофайл с патологическим шумом и примешивать его для выдачи привязанного к положению звукового сигнала, соответствующего положению головки стетоскопа.
Для более реалистичной возможности воспроизведения самых различных источников шума указанного тела предпочтительно по меньшей мере один аудиофайл симулирует сердечный шум и поэтому соответствует положению сердца макета грудной клетки, один аудиофайл симулирует первый легочный шум и поэтому соответствует положению левой половины легких макета грудной клетки, один аудиофайл симулирует второй легочный шум и поэтому соответствует положению правой половины легких макета грудной клетки, и/или один аудиофайл симулирует шум живота и поэтому соответствуют положению живота макета живота.
В целом, в каждом из описанных выше аспектов изобретения, предпочтительно, симулятор пациента представляет собой полное тело соответствующего пациента, т.е. в частности, недоношенного ребенка, новорожденного ребенка или ребенка и поэтому содержит также, наряду с грудной клеткой, животом и макетом головы, макеты конечностей. Кроме того, симулятор пациента выполнен в отношении габаритов и соотношения размеров имитируемых частей тела таким, что он соответствует габаритам и соотношениям размеров реального пациента, т.е. недоношенного ребенка, новорожденного ребенка или ребенка.
Далее приводится более подробное разъяснение изобретения с помощью схематически изображенных на чертежах примеров исполнения:
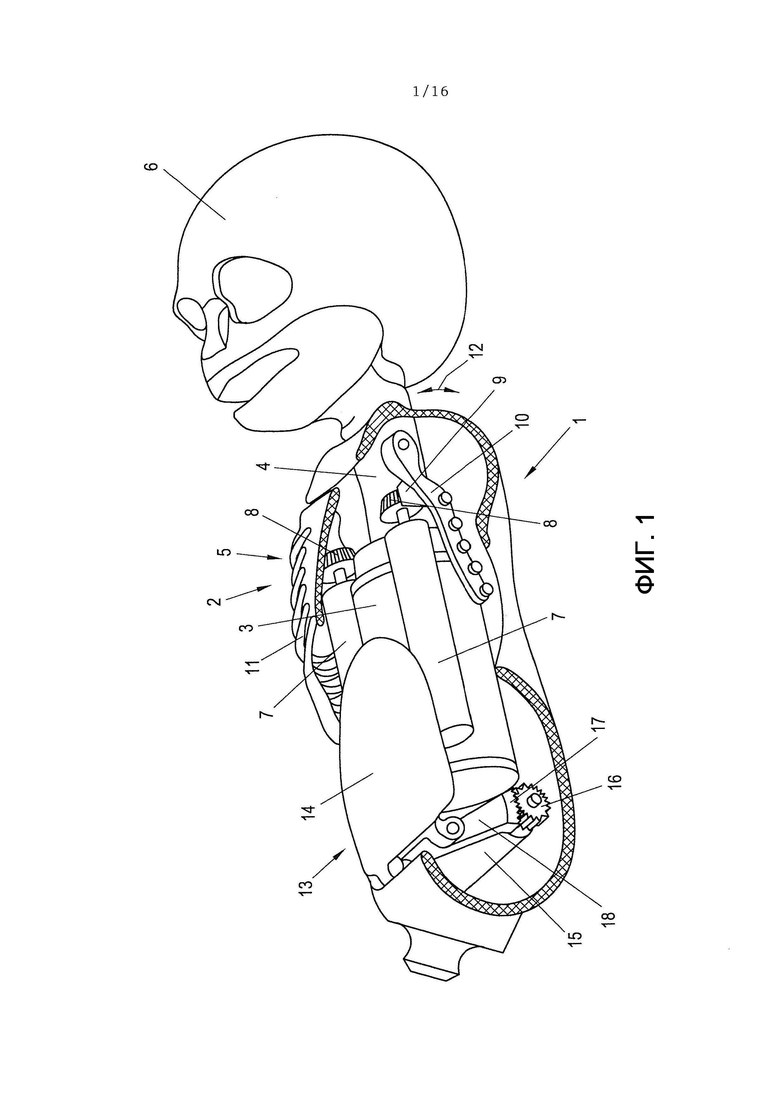
фиг. 1 - симулятор недоношенного ребенка в частично раскрытом изображении;
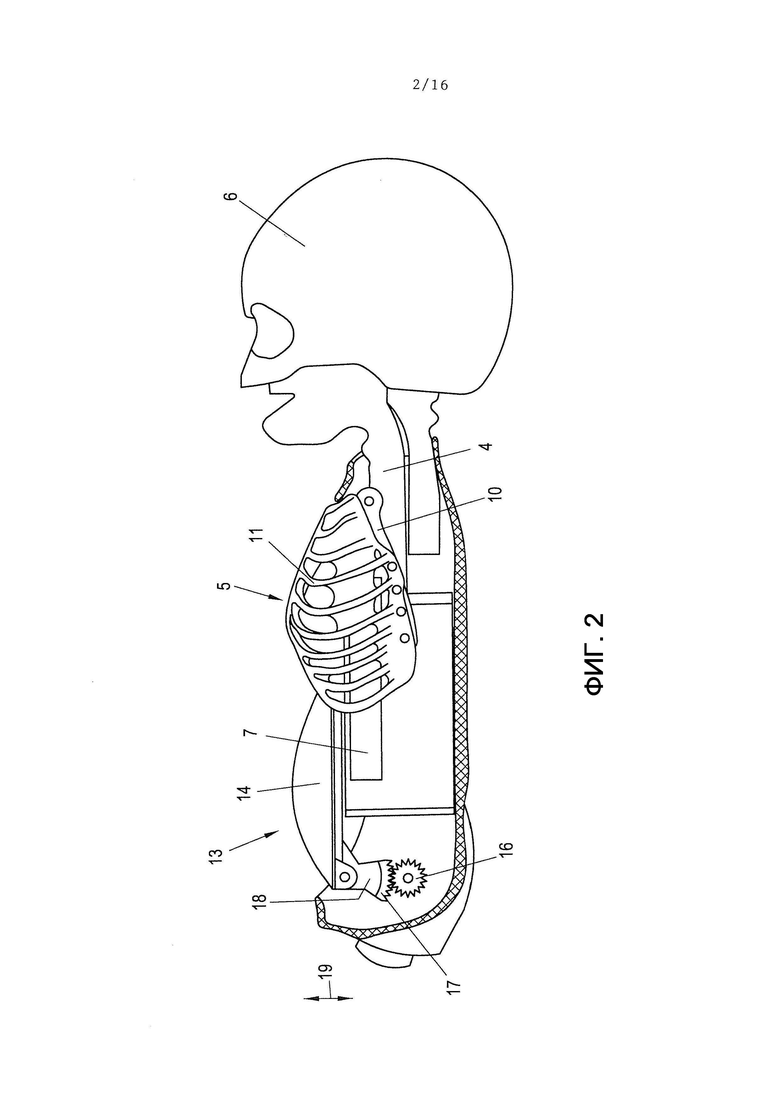
фиг. 2. и фиг. 3 - симулятор недоношенного ребенка с пластиной живота в разных положениях;
фиг. 4 - другое изображение симулятора недоношенного ребенка;
фиг. 5 - детальный вид симулятора недоношенного ребенка с механизмом для межреберного втяжения;
фиг. 6 и фиг. 7 - изображение макета кожи в двух различных состояниях межреберного втяжения;
фиг. 8 - вид в разрезе макета черепа симулятора недоношенного ребенка;
фиг. 9 - другой вид в разрезе макета черепа симулятора недоношенного ребенка;
фиг. 10 - вид спереди макета черепа симулятора недоношенного ребенка;
фиг. 11 - детальное изображение макета черепа на участке носа;
фиг. 12 - макет стетоскопа во взаимодействии с симулятором недоношенного ребенка;
фиг. 13 - блок-схема макета стетоскопа;
фиг. 14 - обзорное изображение логической схемы управления симулятора пациента, касающейся, в частности модели легких;
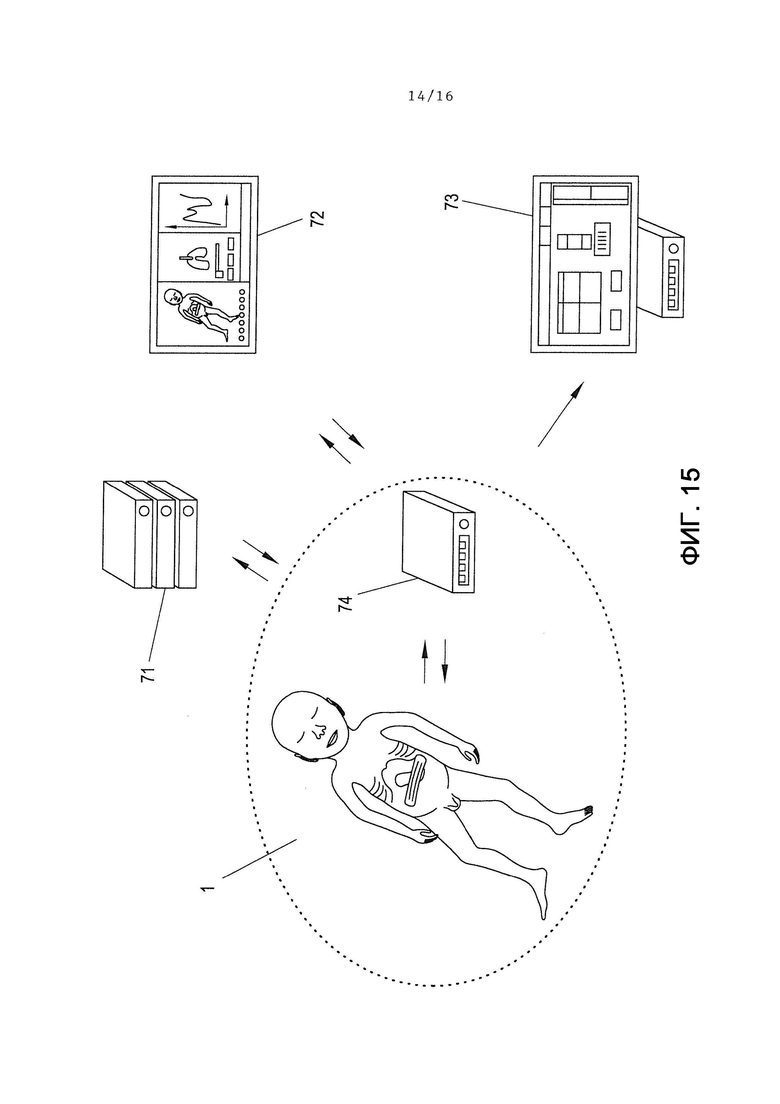
фиг. 15 - общий вид симулятора пациента вместе с компонентами управления и контроля работы;
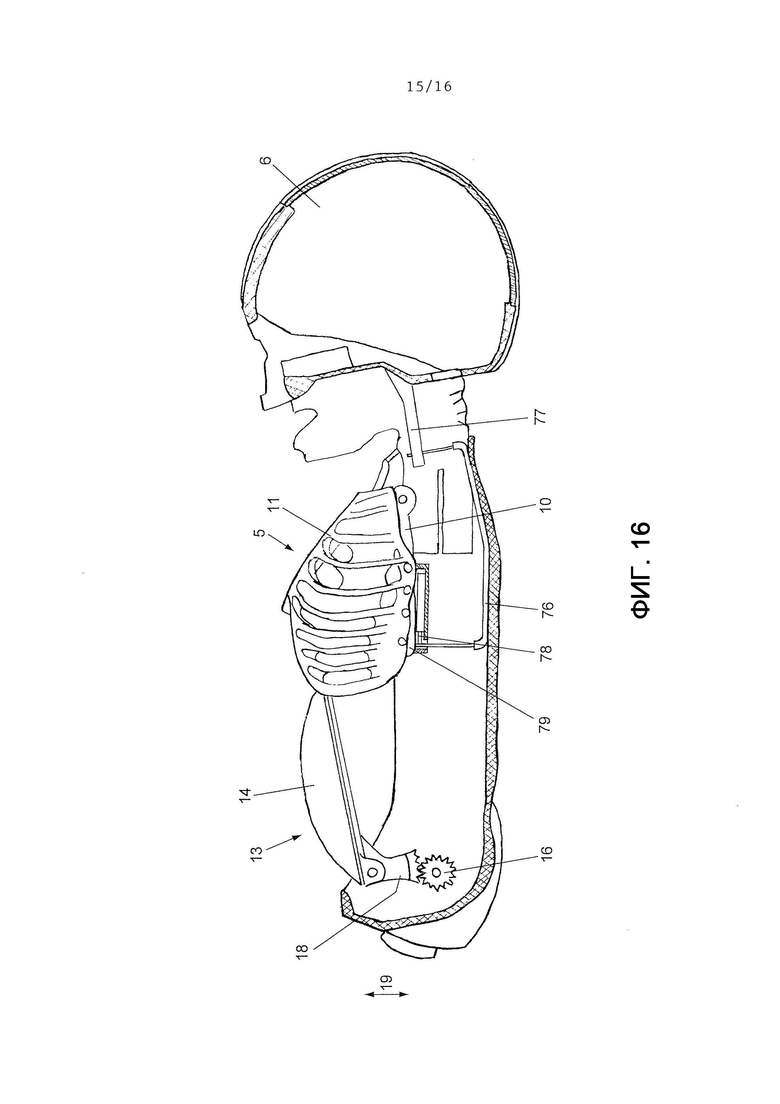
фиг. 16 - вид сбоку симулятора с движением головы, синхронно с дыханием; и
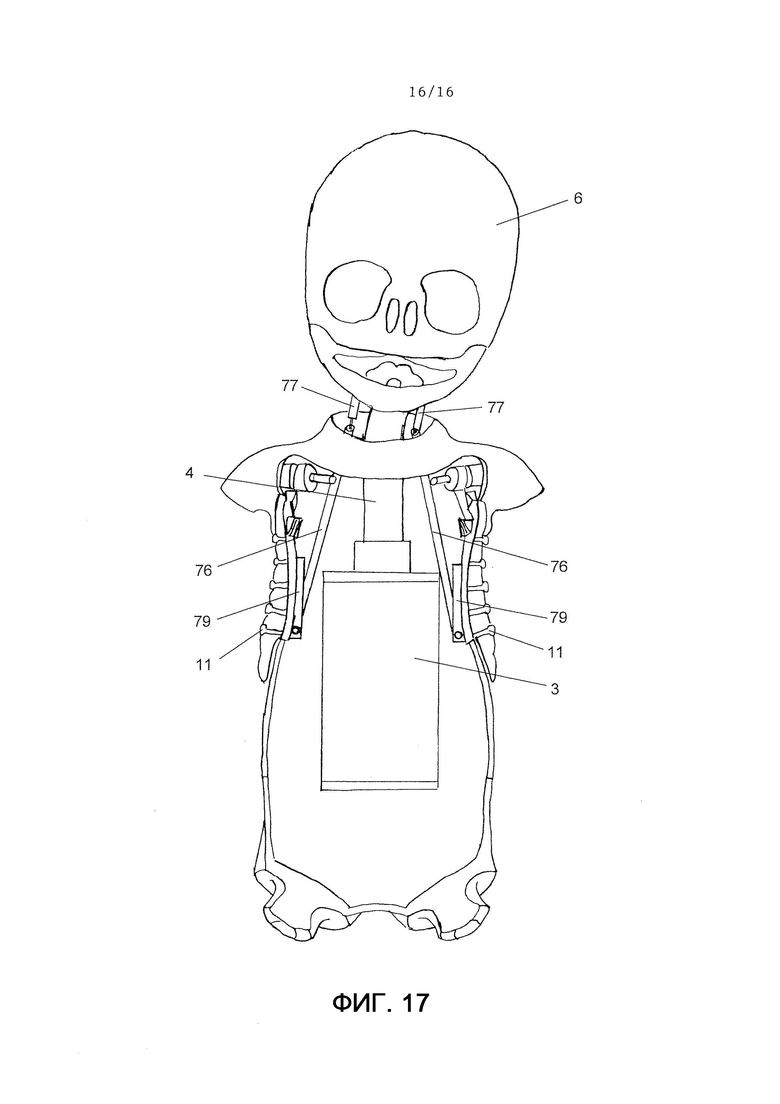
фиг. 17 - вид спереди симулятора согласно фиг. 16.
На фиг. 1 показан симулятор 1 недоношенного ребенка, содержащий макет 2 грудной клетки, симулятор 3 легких и проходящий к симулятору 3 легких макет 4 трахеи. Макет 2 грудной клетки содержит правый, с возможностью подъема и опускания элемент 5 грудной клетки для правой половины грудной клетки и левый, с возможностью подъема и опускания элемент грудной клетки для левой половины грудной клетки (на фиг. l не изображен). Кроме того, симулятор 1 содержит макет 6 черепа. Оба элемента 5 грудной клетки выполнены с отдельным друг от друга подъемом и опусканием и соответственно оснащены собственным управляемым устройством подъема и опускания. Расположенное внутри симулятора 1 устройство подъема и опускания содержит с двух сторон соответственно электромоторный блок 7 приводного устройства, приводящий в движение зубчатое колесо 8. Зубчатое колесо 8 входит в зацепление в выполненную с возможностью поворота на рычаге 10 зубчатую рейку 9, причем на рычаге 10 фиксирован соответственно правый или левый элемент 5 грудной клетки, поэтому движение поворота зубчатого колеса 8 переводится, в зависимости от направления вращения, в движение подъема или опускания рычага 10 с элементом 5 грудной клетки в направлении двойной стрелки 12. Левый и правый элемент 5 грудной клетки имеют соответственно макет 11 ребер.
Кроме того, симулятор 1 содержит макет 13 живота, имеющий с возможностью подъема и опускания пластину 14 живота, причем подъем и опускание пластины 14 живота осуществляют, аналогично подъему и опусканию элементов 5 грудной клетки, с помощью электромотора блоком 15 приводного устройства, приводящего в движение зубчатое колесо 16, входящее в зацепление, в свою очередь, в зубчатую рейку 17, выполненную с возможностью поворота на рычаге 18, на котором фиксирована пластина 14 живота.
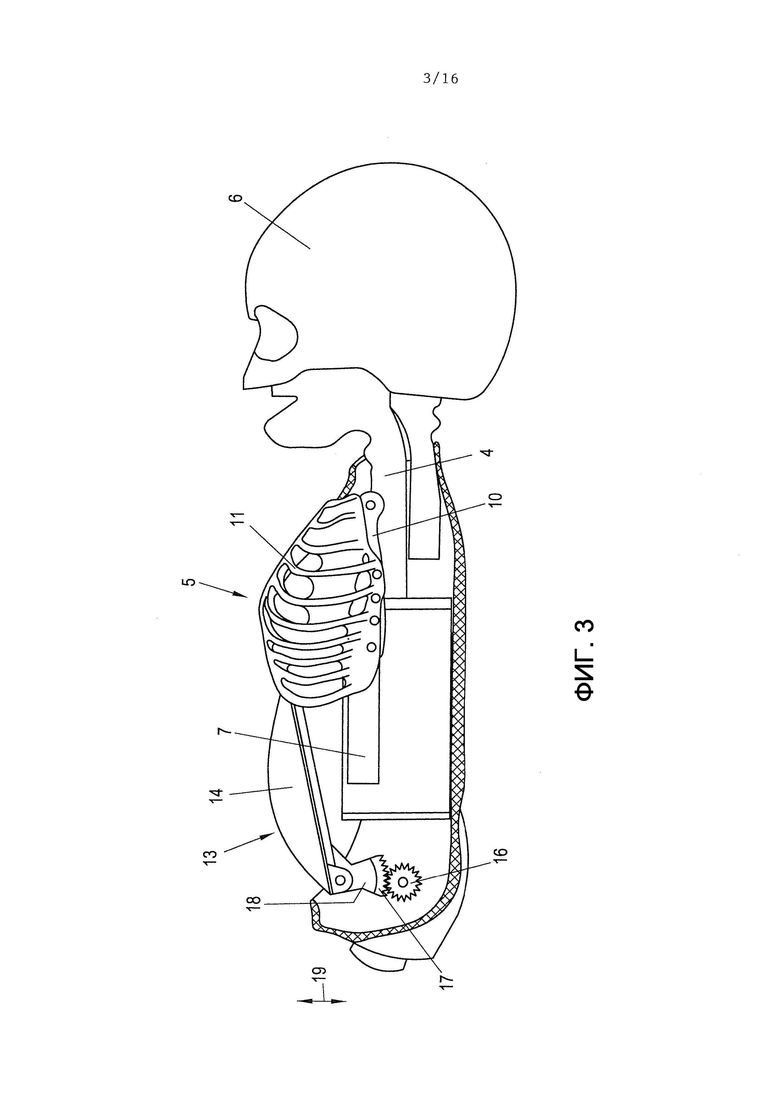
На фиг. 2 показана пластина 14 живота и элементы 5 грудной клетки в опущенном положении, а на фиг. 3 - пластина 14 живота и элементы 5 грудной клетки в поднятом положении.
При приведении в действие электромоторного блока 15 приводного устройства (на фиг. 2 и фиг. 3 не показан), зубчатое колесо 16 поворачивается и вызывает подъем или опускание пластины 14 живота в направлении стрелки 19 при зацеплении зубчатого колеса 16 с зубчатым зацеплением 17, а вследствие этого - поворот с возможностью привода рычага 18. В зависимости от направления вращения зубчатого колеса 16 возможна имитация подъема или опускания живота.
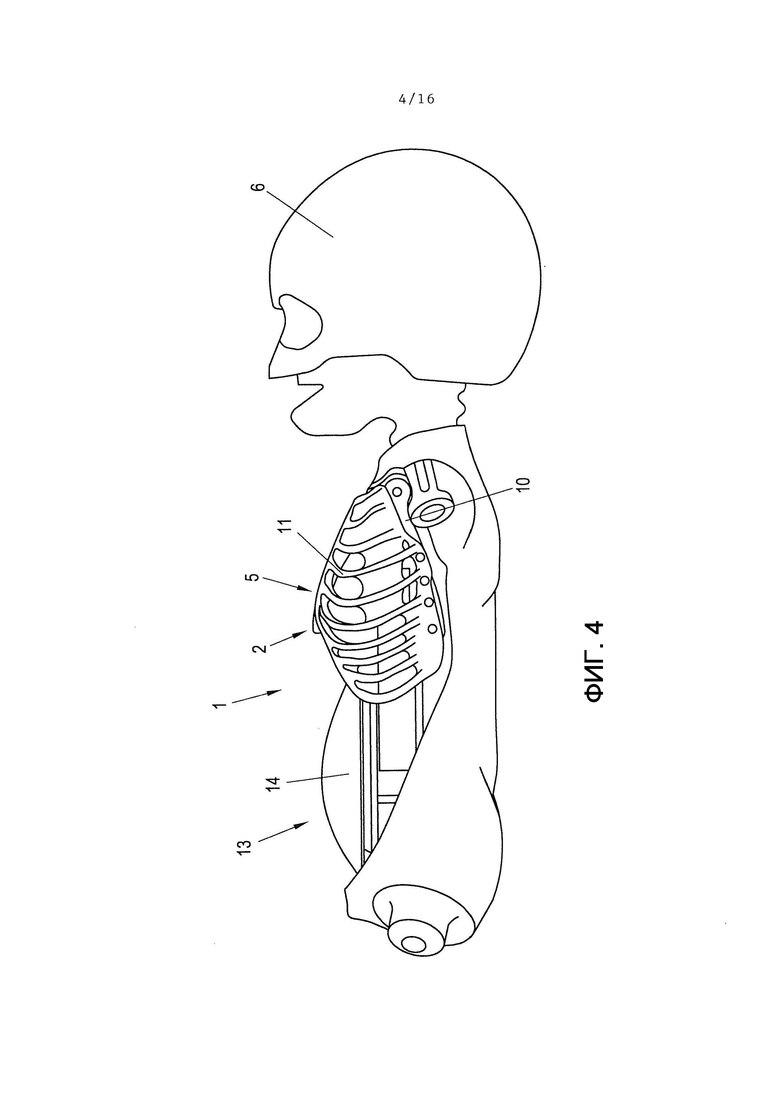
На фиг. 4 показана в сборе анатомическая опорная конструкция симулятора 1 на которой находится макет 20 кожи (на фиг. 4 не изображен), перекрывающий весь симулятор 1, т.е. также и макет 2 грудной клетки вместе с макетами 11 ребер, а также макет 13 живота с пластиной 14 живота. В частности, макет 20 кожи окружает макет 2 грудной клетки, а также макет 13 живота. Макет 20 кожи изготовлен из эластичного материала по меньшей мере например, из силиконового материала, для обеспечения подъема и опускания элементов 5 грудной клетки, а также пластины 14 живота.
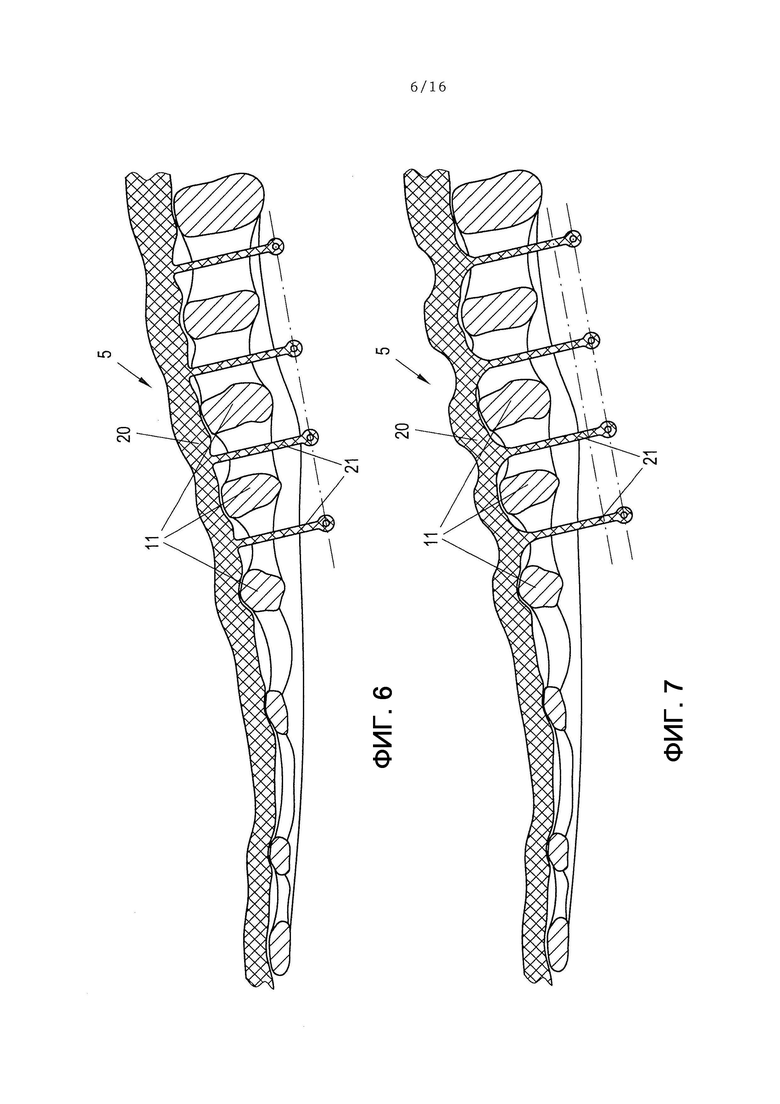
На фигурах 5 - 7 показано, кроме того, что для имитации межреберного втяжения в макете 20 кожи предусмотрены воздействующие средства 21 натяжения. Средства 21 натяжения продолжаются насквозь между отдельными ребрами макета 11 ребер и фиксируются на своем отвернутом от макета 20 кожи в сторону конце, соответственно на поворотных штоках 21'. Поворотные штоки 21' жестко фиксированы на общей оси, а поэтому с возможностью поворота вокруг этой оси, причем для привода поворота предусмотрен электромоторный блок 22 приводного устройства, приводящий в действие зубчатое колесо 23 для движения поворота, входящее в зацепление в фиксированную на поворотных штоках 21' зубчатое колесо 24. Поворот поворотных штоков 21' в направлении двойной стрелки 25 вызывает натягивание макета 20 кожи между макетами 11 ребер или возвратное перемещение в ее обычное положение. Благодаря этому, в зависимости от направления вращения привода 22 становится возможной имитация межреберного втяжения или обычного состояния макета 20 кожи. Привод 22 фиксирован при этом на рычаге 10, отвечающем за подъем и опускание макетов 11 ребер. Вследствие того, что привод 22 при подъеме или опускании рычага передвигается вместе с ним, имитацию межреберного втяжения макета 20 кожи можно осуществлять независимо от соответствующего положения макета 11 ребер.
На фиг. 6 изображен макет 20 кожи в обычном положении, а на фиг. 7 - при симулируемом межреберном втяжении.
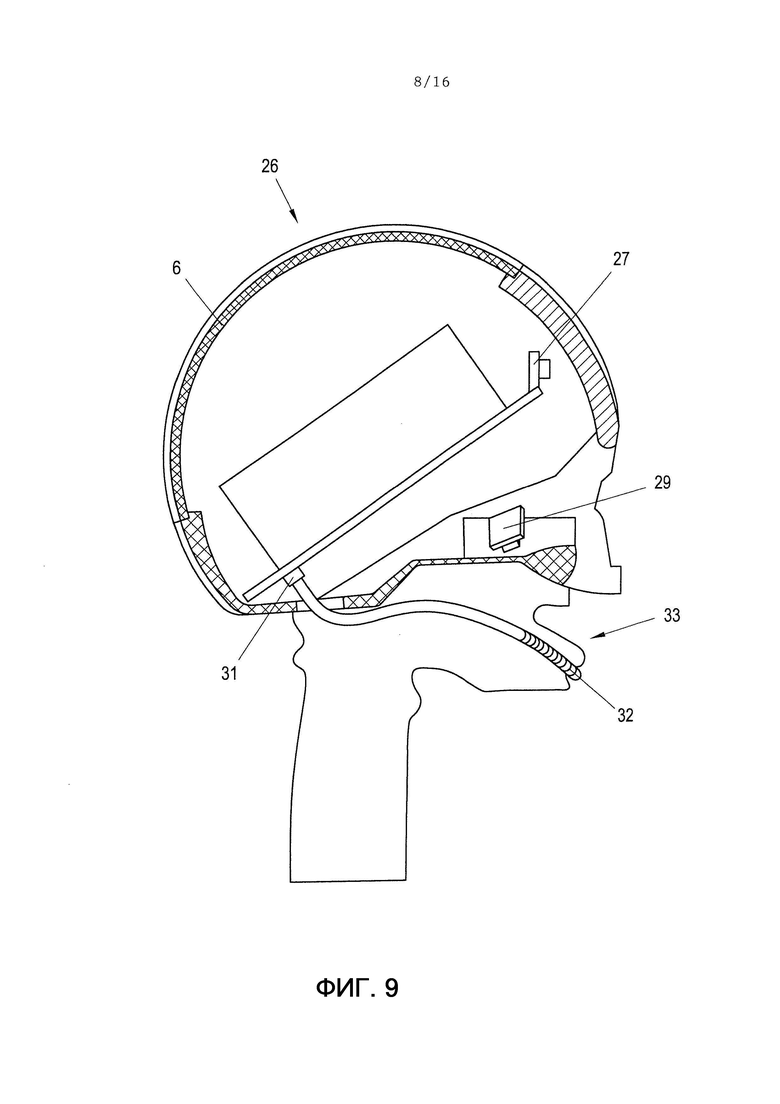
На фиг. 8 и фиг. 9 показан макет 26 головы симулятора 1, имеющий макет 6 черепа. Внутри макета 6 черепа расположены источники 27, 28, 29, 30 и 31 света.
Источники 27 и 28 света фиксированы в расположенной в полости черепа несущей пластине, а на участке лба направлены к внутренней поверхности черепной крышки макета 6 черепа. Источники 29 и 30 света находятся в средней полости черепа макета 6 черепа. Другой источник 31 света расположен внутри макета 6 черепа и питает световод 32, продолжающийся дугообразно в участке 33 подбородка макета 26 головы.
Вследствие того, что макет 6 черепа и макет 20 кожи выполнены просвечивающимися, при приведении в действие источников 27 – 31 света получается, как изображено на фиг. 10, светотехнический узор: при присутствующей синюшности – с характерным синим цветом, а при гипоксии – с характерно окрашенными в красный цвет участками лица.
На фиг. 11 показан макет 26 головы симулятора 1 с макетом 34 носа, имеющим два гибких крыла 35 носа, причем в крылья 35 носа, вовнутрь макета 26 головы, входят приводящие рычаги 36, состоящие из поддающегося намагничиванию материала. Кроме того предусмотрено устройство 37 управления, несущее электромагниты 38, причем при управлении устройством 37 управления активируются электромагниты 38, а магнитные рычаги 36 притягиваются в соответствии со стрелками 39, что в свою очередь обуславливают расширение крыльев носа согласно стрелкам 40.
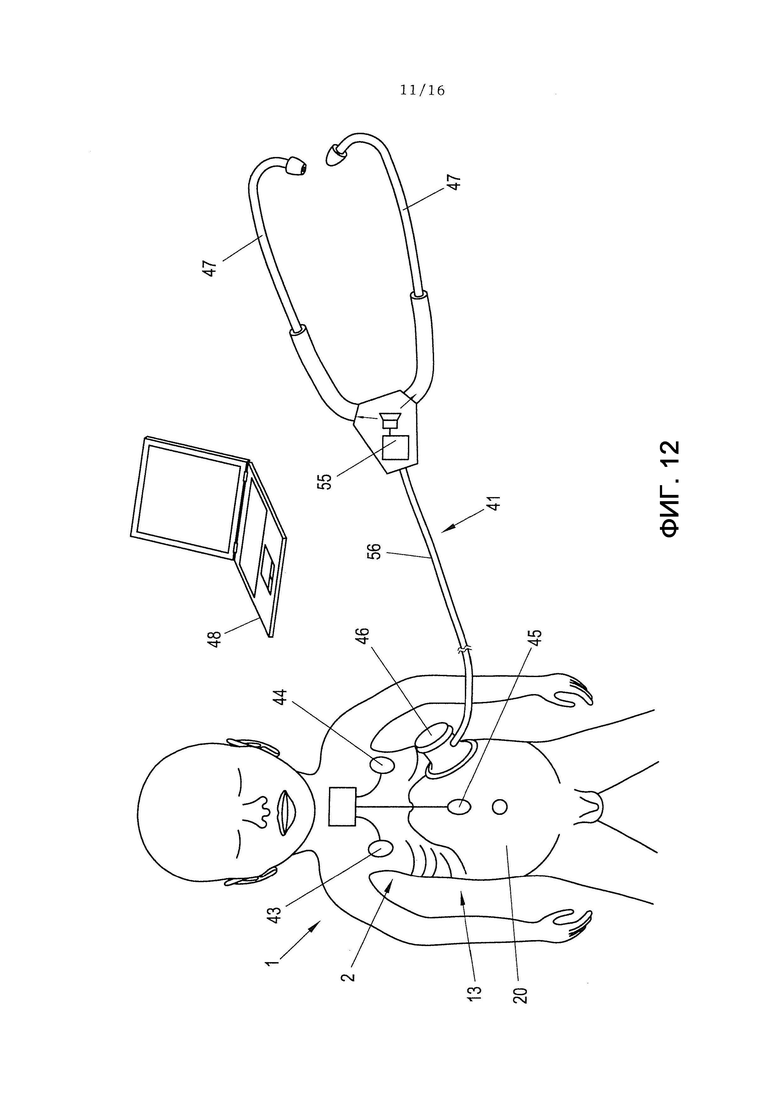
На фиг. 12 показан макет 20 кожи, покрывающий весь симулятор 1, в частности, также макет 2 грудной клетки с макетами 11 ребер, а также макет 13 живота с пластиной 14 живота. В частности, макет 20 кожи окружает макет 2 грудной клетки, а также макет 13 живота. Макет 20 кожи изготовлен из эластичного материала, в частности, например, из силиконового материала для обеспечения подъема и опускания элементов 5 грудной клетки, а также пластины 14 живота.
Кроме того, на фиг. 12 показан симулятор 41 стетоскопа, причем макет 2 грудной клетки и макет 13 живота имеют три датчика 43, 44, 45 расстояния, взаимодействующие с головкой 46 стетоскопа симулятора 41 стетоскопа для определения расстояния между головкой 46 стетоскопа и соответствующим датчиком расстояния 43, 44, 45 для получения пропорциональные расстоянию сигналы. Блок 48 управления содержит запоминающее устройство для аудиофайлов и устройства обработки для смешивания аудиофайлов в зависимости от данных о расстоянии в смешенный (микшированный) звуковой сигнал, подводимый к наушникам 47 симулятора 41 стетоскопа.
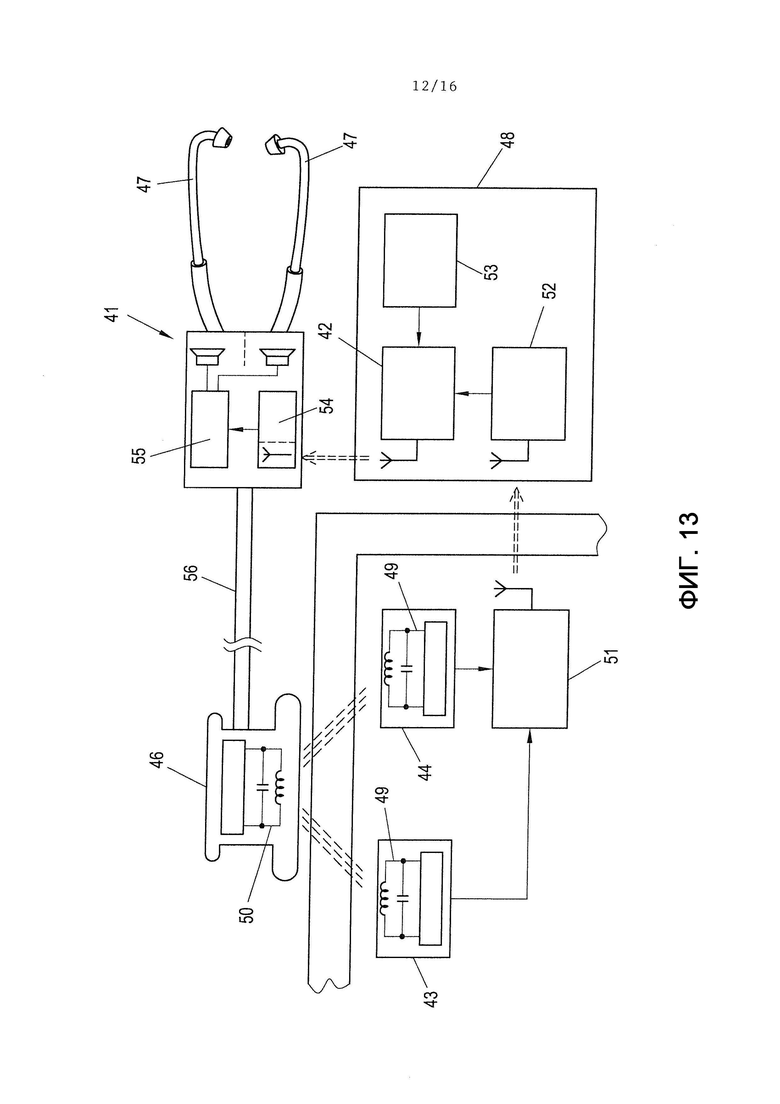
На фиг. 13 схематически изображена блок-схема, причем на ней видно, что датчики 43, 44, 45 расстояния (на фиг. 13 не изображены) симулятора 1 пациента выполнены в виде передатчика ближнего поля с колебательным контуром 49 передатчика, а головка 46 стетоскопа имеет резонансный колебательный контур 50 приемника. При этом передатчики ближнего поля симулятора 1 пациента производят электромагнитное ближнее поле с заданной частотой, причем несущая частота определена, например, в 100 Кгц. Колебательные контуры 49 передатчика настроены на эту несущую частоту, причем резонансная частота и амплитуда изменяются в зависимости от удаления до колебательного контура 50 приемника. Резонансная частота и амплитуда обоих колебательных контуров 49 передатчика обрабатываются в устройстве 51 обработки данных и передаются в виде представленных соответствующих расстоянию до головки 46 стетоскопа данных о расстоянии по радио в центральное внешнее устройство 48 управления, например, в ЭВМ. В устройстве 48 управления данные о расстоянии принимаются приемным модулем 52. Данные о расстоянии могут непосредственно подводиться к генератору 42 звука или сначала пересчитываться, например, способом триангуляции, в данные о положении. В генераторе звука устройство обработки обеспечивает смешивание (микширование) аудиофайлов 53 в зависимости от данных о расстоянии или положении в общий звуковой сигнал. Звуковой сигнал передается по радио в модуль 54 приемника симулятора 41 стетоскопа и усиливается в нем в усилителе 55, и подводится к наушникам 47. Симулятор 41 стетоскопа содержит, кроме того, не показанный блок энергоснабжения, питающий не только модуль 54 приемника и усилитель 55, но и также по проводным линиям 56 колебательный контур 50 приемника.
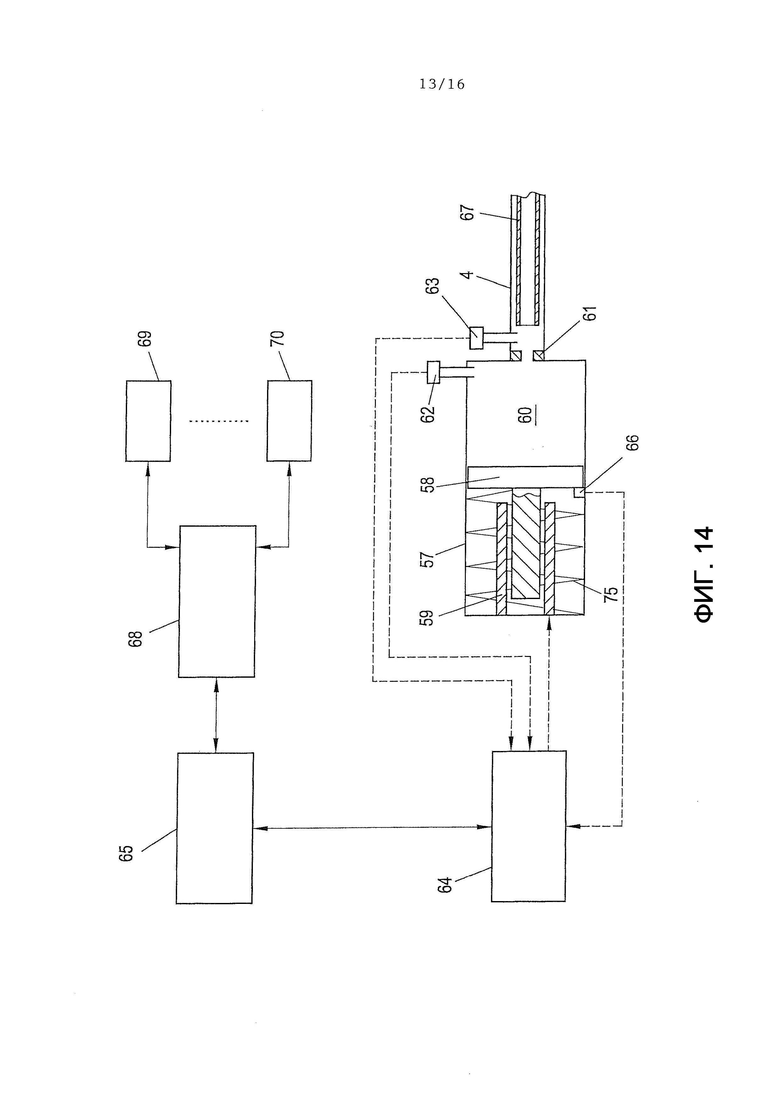
На фиг. 14 изображено управление симулятора легких, а также более подробно отдельное от него управление механизмом подъема и опускания макета грудной клетки.
Симулятор 3 легких содержит с жесткими стенками, предпочтительно, металлический цилиндр 57, с расположенным в нем с возможностью перемещения в осевом направлении поршнем 58 с помощью привода 59 (например, шагового двигателя). Вместо шагового двигателя привод поршня 58 может осуществляться также посредством линейного двигателя, функционирующего, предпочтительно, благодаря электромагнитному полю, например, посредством магнитного линейного привода. Поршень 58 ограничивает рабочий объем или полость 60 симулятора 3 легких, в которую впадает макет 4 трахеи, в которую можно вводить тубус 67 аппарата искусственного дыхания (не изображено). В переходе из макета 4 трахеи в полость 60 предусмотрено узкое место 61, создающее сужение для поперечного сечения потока воздуха в макете 4 трахеи. Кроме того, предусмотрены датчики 62 и 63 давления с клапаном избыточного давления (не изображены) для ограничения максимально допустимого давления, расположенные для измерения давления в полости 60, а также в макете 4 трахеи.
Для имитации отдельных функций легких предусмотрено компьютеризованное устройство 64 управления, в частности, вычислительное устройство, взаимодействующее с физиологической математической моделью 65, с помощью которой можно симулировать физиологические взаимосвязи симулируемых параметров симулятора легких. В устройство 64 управления подводят сигналы датчиков 62 и 63 давления, а также сигналы датчика 66 для определения актуального положения поршня 58. Устройство 64 управления выдает команды управления для поршневого привода 59 для регулируемого управления и движения поршня 58, причем посредством использования быстродействующей системы управления и, благодаря жесткому исполнению ограничивающих полость стенок, можно подстраивать характеристики гибкой мембраны, предусмотренной в обычных симуляторах легких.
Для симуляции пациента, подключенного к аппарату искусственного дыхания, достаточно симулировать дыхательный объем пациента, которому делается искусственное дыхание, представляющий собой только небольшую часть общей емкости легкого. Поэтому полость 60 симулятора легких рассчитана так, что она соответствует при максимальном положении поршня дыхательному объему, включая резерв объема для регулирования, настоящего пациента, в частности, недоношенного ребенка, новорожденного ребенка или ребенка.
Для симуляции легкого для аппарата искусственного дыхания, динамика изменения объема и давления должна изменяться по времени в диапазоне физиологических или патологических параметров. Это обеспечивает при применении аппаратов искусственного дыхания (машинных и ручных) в комбинации с интегрированным легочным макетом отображение реалистичных параметров искусственного дыхания и позволяет регулировать реалистичные величины давления и объема дыхания в аппаратах искусственного дыхания. Благодаря этому получают также реалистичное срабатывание тревожных сигналов давления и объема в аппарате искусственного дыхания.
Для имитации объема вдоха симулятора пациента объем полости 60 увеличивают при имитации вздоха при соответствующем движении поршня 58 и уменьшают при имитации выдоха.
Для имитации комплайнса устанавливают, как актуальное давление в полости 60, так и актуальный объем полости 60. Комплайнс определяют при этом, как увеличение объема ΔV на увеличение приложенного давления газа Δp, причем зависимость увеличения объема ΔV от увеличения давления Δp нелинейная, т.е. отношение ΔV/Δp становится к концу вздоха меньше (даже небольшой прирост объема создает большое повышение давления). Давление p измеряют с помощью датчика 62 давления. Объем V (текущая скорость) получают из известного поперечного сечения цилиндра 57 и измеренного датчиком 66 положения поршня. Если давление изменяется иначе, чем задается положением поршня (прямо пропорционально к объему), то положение поршня можно подводить с помощью электромеханического привода 59. Срабатывание по времени регулирования следует выбирать для этого насколько возможно быстрым, чтобы не были заметны ступени квантования. В выбранной конструкции дополнительно к датчику давления в рабочем объеме, в сочетании с узким местом на выпуске поршня может быть реализован датчик объемного расхода, который можно использовать для уточнения картины.
С позиции аппарата искусственного дыхания релевантно только давление в конце тубуса. Это обстоятельство можно использовать для симуляции резистентности посредством динамических компонентов системы регулирования. Она дополнительно вводит временной компонент в систему. При повышенном сопротивлении потоку в дыхательных путях наполнение легкого замедляется или затрудняется настолько, что становится невозможным газообмен в предусмотренное время 
 .
.
Повышенная резистентность приводит к противодавлению газовой дыхательной смеси в тубусе, давление растет, объемный расход снижается. Низкая резистентность R в легком создает небольшое противодавление p в тубусе, объемный расход V становится максимальным.
Для симуляции этого эффекта с помощью только одного единственного поршня 58, необходимо подгонять давление в полости 60 к давлению в тубусе 67. При низкой резистентности давление в полости 60 поддерживается ниже или равным давлению в тубусе 67 для облегчения поступления газов. При повышенной резистентности в полости 60 создают повышенное противодавление, затрудняющее поступление газовой дыхательной смеси. При этом сокращение или увеличение противодавления производят посредством перемещения поршня 58. Таким образом, при управлении положениями поршня учитывают две влияющие величины. С одной стороны, получающееся из комплайнса положение поршня в зависимости от давления в полости 60, а, с другой стороны, получающаяся из резистентности регулировка противодавления.
Посредством регистрации величин давления, как в полости 60, так и в тубусе 67 и посредством известного диаметра узкого места дополнительно можно сделать вывод об актуальном объемном расходе.
Опциональная действующая на поршень пружина 75 предоставляет в распоряжение так называемую основную растяжимость, в частности, пружина 75 обуславливает пассивное удерживание давления в полости 60 симулятора легких.
Другая точка зрения представляет собой оценку объемного расхода, так как оба датчика давления с узким местом образуют датчик объемного расхода, непосредственно измеряющим объемный расход.
В устройство 64 управления, благодаря измерительным величинам от датчиков 62 и 63 давления, а также, благодаря определенным датчиком 66 положений поршня, предоставляются данные об объеме полости 60, объемном расходе в полости 60 или из нее, а также давления в полости 60. С помощью физиологической математической модели 65 можно вычислять из нее информацию, относительно комплайнса и резистентности или наоборот, соответствующие величины для давления, объемного расхода и объема можно вычислять из заданной величины комплайнса и заданной величины резистентности.
Физиологическая арифметическая модель выполнена для определения актуального объема наполнения из величин комплайнса, резистентности и дыхательных патологий (например, маятникообразного дыхания) и, кроме того, для отдельного создания данных положения для положения в данный момент макета грудной клетки и пластины живота, подводимых в блок 68 анимационного управления. В блоке 68 анимационного управления создаются командные сигналы из этого для взаимодействующего с макетом грудной клетки устройства 69 подъема и опускания и для взаимодействующего с пластиной живота устройства 70 подъема и опускания, поэтому имитация дыхательных движений осуществляется синхронно и в соответствии с имитационным состоянием симулятора 3 легких.
На фиг. 15 изображен общий вид имитационной системы, содержащей симулятор 1 пациента и компоненты управления и контроля работы. Симулятор 1 пациента представляет собой макет всего тела недоношенного ребенка, новорожденного ребенка или ребенка. Система содержит, кроме того, сервер 71, графический пользовательский интерфейс 72, монитор 73 пациента и имитационную ЭВМ 74.
Имитационная ЭВМ 74 отвечает за обмен данными симулятора 1 пациента с графическим пользовательским интерфейсом 72 и монитором 73 пациента и интегрирована предпочтительно в симулятор 1 пациента. При этом имитационная ЭВМ 74 берет на себя требующую большого объема вычислений подготовку команд управления и сбор данных от датчиков. Для этого имитационная ЭВМ 74 взаимодействует с установленными в симуляторе 1 компонентами и собирает различные данные от датчиков симулятора 1, обрабатывает их и создает в дальнейшем командные сигналы, с помощью которых контролируются, например, серводвигатели симулятора 1.
Имитационная ЭВМ 74 содержит, что касается симулятора легких (фиг. 14), физиологическую математическую модель 65 и блок 68 анимационного управления.
Управление всей системой имитации осуществляет инструктор через графический пользовательский интерфейс 72. Экранное меню обеспечивает инструктору введение общих условий для сценария тренировки. В течение упражнения с помощью него управляют желаемыми патологическими изменениями, а осуществляемые участником тренинга мероприятия видны инструктору на экранном меню при визуальном отображении данных датчиков системы. Для этого параметры и отдельные функции симулятора 1, как дыхание и биение сердца, сначала передаются в имитационную ЭВМ 74, а в ней для симулятора 1 пациента генерируются соответствующие команды управления.
Экранное меню разделено, предпочтительно, на три участка: 1.) изображение новорожденного ребенка или недоношенного ребенка, с элементами управления, например, для ЭКГ, мониторинга насыщения и периферических доступов; 2). участок для управления функциями дыхания и 3). участок для отображения и управлению монитором 73 пациента. В центре экранного меню располагаются 3 D модель легкого и 3D-модель симулятора соответственно в актуальном имитационном состоянии. Элементы управления обеспечивают "дистанционное управление" системы имитации посредством промежуточного слоя имитационной ЭВМ 74. Имитационная ЭВМ 74 непрерывно определяет актуальное состояние, в котором в данный момент находится симулятор 1 и передает его в графический пользовательский интерфейс 72, точно воспроизводящий это состояние на его поверхности. Это обеспечивает, например, живое изображение мероприятий, осуществляемых участниками тренинга, например, непрямые массажи сердца.
Для изображения симулируемых жизненно важных показателей симулируемого пациента система содержит монитор 73 пациента. На монитор 73 пациента по радио передаются измеренные и с возможностью регулирования жизненные параметры, изображаемые в режиме реального времени на графическом пользовательском интерфейсе 72, а от него, предпочтительно, - по беспроводным линиям связи, например, по WLAN (беспроводной локальной вычислительной сети). Благодаря этому, для участников тренировки визуально отображаются физиологические данные симулируемого пациента. Реализованное изображение этих показателей имеет решающее значение для принимающих участие в тренировке для выработки решений и инициации соответствующих мероприятий. Для обслуживания монитора, например, для подтверждения сигналов тревоги, он располагает сенсорным экраном.
Опциональный сервер 71 служит для управления и обмена данными, относящимися к монитору 73 пациента и не отображаемые в модели симулятора 1.
На фиг. 16 и фиг. 17 показан вид сбоку и вид спереди симулятора со средствами для имитации синхронного с дыханием движения головы. Фиг. 16 соответствует, по существу, варианту исполнения согласно фиг. 3, причем дополнительно предусмотрены два боуденовских тросика 76, проходящие по обе стороны макета дыхательных путей (макета 4 трахеи). Боуденовские тросики 76, с одной стороны, установлены прочно на двух рычагах 77 макета 6 черепа, в частности, в заднем своде неба, а с другой стороны, прикреплены и соединены с хвостовым концом обоих крыльев 79 ребер, плечами рычага половин грудной клетки, соответственно посредством с возможностью управления зажимного механизма 78. При активации зажимного механизма 78, устанавливается выдерживающее растяжение соединение между тросом соответствующего боуденовского тросика 76 и крыльев 79 ребер, поэтому подъем крыльев 79 ребер вызывает соответствующее растягивающее усилие троса. Зажимной механизм 78 обеспечивает фиксацию соответствующего боуденовского тросика 76 при максимальном выдохе (крылья 79 ребер опущены). При подъеме крыльев 79 ребер при вдохе растягивающее усилие прикладывается на трос боуденовского тросика, вызывающее, вследствие этого наклон головы 6 вперед, синхронное к подъему груди. Встречное движение осуществляется при противодействующем усилии натянутых силиконовых компонентов (например, силиконовой кожи на участке затылка и силиконовых компонентах дыхательного пути) симулятора. Эти элементы действуют в качестве противодействующей пружины.
Благодаря возможности раздельного управления обоими зажимными механизмами 78, можно осуществлять, как наклон вперед при активизации обоих зажимов 78, так и наклон вбок, - при активизации только одного зажима 78.
Дальнейшим аспектом является момент времени зажима во время подъема крыльев 79 ребер, так это может влиять на усилие движения головы. При активации зажимного механизма 78 не в положении максимального выдоха, а только после того, как крылья 79 ребер прошли первый участок пути, наклон головы осуществляется в меньшей степени. Такие возможности вариации позволяют выполнять возможное движение головы по случайному принципу переменно, поэтому движение соответствует естественному.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕАБИЛИТАЦИИ НОВОРОЖДЕННЫХ ДЕТЕЙ С ПЕРИНАТАЛЬНОЙ ПАТОЛОГИЕЙ | 1994 |
|
RU2071758C1 |
| СПОСОБ ОБУЧЕНИЯ С ИСПОЛЬЗОВАНИЕМ ВЗАИМОДЕЙСТВИЯ С ФИЗИЧЕСКИМИ ОБЪЕКТАМИ В ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ | 2022 |
|
RU2799123C1 |
| СИМУЛЯЦИОННЫЙ КОМПЛЕКС ДЛЯ ОБСЛЕДОВАНИЯ БРЮШНОЙ ПОЛОСТИ C ПРИМЕНЕНИЕМ VR-СИМУЛЯЦИИ НА БАЗЕ КОМПЛЕКСНОЙ ТЕХНОЛОГИИ ТАКТИЛЬНОГО ТРЕКИНГА | 2022 |
|
RU2798405C1 |
| СПОСОБ ДОКЛИНИЧЕСКОЙ ДИАГНОСТИКИ СТЕПЕНИ ТЯЖЕСТИ РЕСПИРАТОРНОГО ДИСТРЕСС-СИНДРОМА ПРИ ВНУТРИУТРОБНОМ ГРИППЕ A(Н3N2) У НЕДОНОШЕННЫХ НОВОРОЖДЕННЫХ | 2012 |
|
RU2492489C1 |
| СПОСОБ ПОСТНАТАЛЬНОГО ПРОГНОЗИРОВАНИЯ ПЕРСИСТЕНЦИИ ГЕМОДИНАМИЧЕСКИ ЗНАЧИМОГО ОТКРЫТОГО АРТЕРИАЛЬНОГО ПРОТОКА У НЕДОНОШЕННЫХ ДЕТЕЙ | 2014 |
|
RU2556793C1 |
| СПОСОБ ЛЕЧЕНИЯ БРОНХООБСТРУКТИВНОГО СИНДРОМА У НОВОРОЖДЕННЫХ ДЕТЕЙ С ПНЕВМОНИЕЙ И ТРАХЕОБРОНХИТОМ | 2008 |
|
RU2381040C2 |
| СПОСОБ ОБСЛЕДОВАНИЯ ПАЦИЕНТА ПЕРЕД КОРРЕКЦИЕЙ РЕЧЕВЫХ НАРУШЕНИЙ | 2023 |
|
RU2819386C1 |
| СПОСОБ ДИАГНОСТИКИ РЕСПИРАТОРНОГО ДИСТРЕСС-СИНДРОМА У НЕДОНОШЕННЫХ НОВОРОЖДЕННЫХ | 1999 |
|
RU2159937C1 |
| Способ прогнозирования дыхательных нарушений у новорожденных, родившихся у матерей с преэклампсией | 2019 |
|
RU2693830C1 |
| УСТРОЙСТВО ДЛЯ ВЫХАЖИВАНИЯ НЕДОНОШЕННЫХ НОВОРОЖДЕННЫХ | 2008 |
|
RU2376969C1 |



Изобретение относится к медицинской технике, используемой для обучения оказанию реанимационных мероприятий. Симулятор пациента содержит макет грудной клетки, симулятор легких и проходящий к симулятору легких анатомический макет трахеи. Макет грудной клетки включает по меньшей один элемент для имитации подъема и опускания грудной клетки. Устройство подъема и опускания выполнено с возможностью взаимодействовать с по меньшей мере одним поднимаемым и опускаемым элементом грудной клетки и приводить его в движение. Устройство подъема и опускания механически независимое от симулятора легких, так что подъем и опускание грудной клетки симулируется независимо от текущего состояния симулятора легких. Устройство подъема и опускания содержит пневматический, гидравлический или электрический привод для каждого указанного поднимаемого и опускаемого элемента грудной клетки. Раскрыты альтернативные варианты выполнения симулятора пациента. Технический результат сводится к обеспечению имитации патологических состояний недоношенного ребенка. 7 н. и 28 з.п. ф-лы, 17 ил.
1. Симулятор пациента, содержащий макет грудной клетки, симулятор легких и проходящий к симулятору легких анатомический макет трахеи, причем макет грудной клетки включает в себя по меньшей мере один элемент грудной клетки, выполненный с возможностью подъема и опускания, для имитации подъема и опускания грудной клетки, отличающийся тем, что содержит устройство подъема и опускания, выполненное с возможностью взаимодействовать с указанным по меньшей мере одним поднимаемым и опускаемым элементом грудной клетки и приводить его в движение,
при этом устройство подъема и опускания механически независимое от симулятора легких, так что подъем и опускание грудной клетки симулируется независимо от текущего состояния симулятора легких, причем устройство подъема и опускания содержит пневматический, гидравлический или электрический привод для каждого указанного поднимаемого и опускаемого элемента грудной клетки.
2. Симулятор пациента по п. 1, отличающийся тем, что он является симулятором недоношенного ребенка, или новорожденного ребенка, или ребенка.
3. Симулятор пациента по п. 1 или 2, отличающийся тем, что содержит по меньшей мере один датчик для измерения состояния симулятора легких, в частности по меньшей мере один датчик давления для измерения давления в по меньшей мере одной полости симулятора легких, и устройство управления, причем устройство управления выполнено с возможностью принимать сигналы указанного по меньшей мере одного датчика и управлять приводом подъема и опускания указанного макета грудной клетки таким образом, чтобы поднимать и опускать указанный по меньшей мере один поднимаемый и опускаемый элемент грудной клетки в зависимости от сигналов, причем указанный датчик давления, предпочтительно, выполнен и расположен с возможностью определения давления искусственного дыхания.
4. Симулятор пациента по любому из пп. 1 – 3 , отличающийся тем, что содержит по меньшей мере один правый поднимаемый и опускаемый элемент грудной клетки для правой половины грудной клетки и по меньшей мере один левый поднимаемый и опускаемый элемент грудной клетки для левой половины грудной клетки, которые выполнены с возможностью подниматься и опускаться отдельной друг от друга и взаимодействовать с собственным управляемым устройством подъема и опускания, причем указанное устройство подъема и опускания для правого элемента грудной клетки и указанное устройство подъема и опускания для левого элемента грудной клетки выполнены с возможностью управляться независимо друг от друга.
5. Симулятор пациента по любому из пп. 1 – 4, отличающийся тем, что симулятор легких содержит по меньшей мере один регулировочный элемент для регулировки податливости и/или по меньшей мере один регулировочный элемент для регулировки стойкости.
6. Симулятор пациента по любому из пп. 1 – 5, отличающийся тем, что указанные устройства подъема и опускания расположены в макете грудной клетки, в частности под указанным по меньшей мере одним поднимаемым и опускаемым элементом грудной клетки.
7. Симулятор пациента по любому из пп. 1 – 6, отличающийся тем, что указанный привод для каждого устройства подъема и опускания содержит блок приводного устройства с электромотором, предпочтительно, содержащий рычаг для осуществления поворотного движения.
8. Симулятор пациента по любому из пп. 1 – 7, отличающийся тем, что в указанном макете грудной клетки, в частности в макете дыхательных путей, предпочтительно в указанном макете трахеи, размещен датчик влажности для обнаруживания впрыскивания жидкости, например сурфактантного препарата, в дыхательные пути и/или легкие, причем указанный датчик выполнен с возможностью взаимодействия с симулятором легких таким образом, чтобы при обнаружении жидкости изменять указанные величины податливости и/или стойкости симулятора легких.
9. Симулятор пациента по п. 8, отличающийся тем, что датчик влажности расположен на адсорбирующем жидкость материале или в нем, в частности в пенном материале.
10. Симулятор пациента по любому из пп. 1 – 9, отличающийся тем, что указанный по меньшей мере один поднимаемый и опускаемый элемент грудной клетки содержит множество макетов ребер, а макет грудной клетки содержит макет кожи, покрывающий макеты ребер и выполненный с возможностью подниматься и опускаться вместе с указанным по меньшей мере одним поднимаемым и опускаемым элементом грудной клетки, причем к указанному по меньшей мере одному поднимаемому и опускаемому элементу грудной клетки прикреплено средство натяжения или давления, воздействующее на макет кожи, такое как по меньшей мере одна нить или стержневой элемент тяги, при этом указанный по меньшей мере один поднимаемый и опускаемый элемент грудной клетки несет приводной элемент, в частности электромотор, для перемещения указанного средства натяжения, так чтобы вызывать межреберное втяжение макета кожи.
11. Симулятор пациента, содержащий макет головы, включающий в себя макет черепа, покрытый макетом кожи, причем в макете черепа или на нем расположен по меньшей мере один источник света.
12. Симулятор пациента по п. 11, отличающийся тем, что он является симулятором недоношенного ребенка, или новорожденного ребенка, или ребенка.
13. Симулятор пациента по п. 11 или 12, отличающийся тем, что указанный по меньшей мере один источник света образован красно- зелено-синим (КЗС) светодиодом, причем цветовые каналы указанного светодиода управляются по отдельности независимо друг от друга.
14. Симулятор пациента по любому из п. 11 – 13, отличающийся тем, что на внутренней поверхности черепной крышки макета черепа расположен источник света.
15. Симулятор пациента по любому из пп. 11 – 14 , отличающийся тем, что в макете черепа расположен источник света таким образом, чтобы освещать изнутри среднюю полость черепа.
16. Симулятор пациента по любому из пп. 11 – 15, отличающийся тем, что макет черепа выполнен из полимерного, в частности белого, материала, а макет кожи выполнен прозрачным или просвечивающим, в частности из силиконового материала.
17. Симулятор пациента по любому из пп. 11-16, отличающийся тем, что источник света соединен со световодом, проходящим дугообразно в области подбородка макета головы и выполненным с возможностью излучения света вдоль указанной дуги, причем указанный светоизлучающий дугообразный участок световода предпочтительно расположен между макетом кожи и макетом дыхательных путей.
18. Симулятор пациента, содержащий макет головы с макетом носа с двумя гибкими крыльями носа, причем в крылья носа входит проходящий во внутреннюю часть макета головы приводной элемент в виде по меньшей мере одной нити или рычага, для симуляции расширения и сужения крыльев носа.
19. Симулятор пациента по п. 18, отличающийся тем, что он является симулятором недоношенного ребенка, или новорожденного ребенка, или ребенка.
20. Симулятор пациента по п. 18 или 19, отличающийся тем, что крылья носа выполнены эластичными, так чтобы обеспечивать автоматический возврат в исходное положение после освобождения от указанного средства натяжения.
21. Симулятор пациента по любому из пп. 18 – 20, отличающийся тем, что содержит центральное устройство управления, выполненное с возможностью управления указанным устройством подъема и опускания макета грудной клетки и с возможностью управления указанным приводным элементом для крыльев носа таким образом, чтобы синхронно происходило расширение крыльев носа и подъем указанного по меньшей мере одного поднимаемого и опускаемого элемента грудной клетки.
22. Симулятор пациента, содержащий макет грудной клетки, макет живота, симулятор стетоскопа и генератор звука, причем макет грудной клетки и макет живота содержат по меньшей мере два датчика расстояния, выполненные с возможностью взаимодействия с головкой стетоскопа указанного симулятора стетоскопа, для определения положения головки стетоскопа, причем определенные данные положения передаются генератору звука, а генератор звука содержит запоминающее устройство для аудиофайлов и устройство обработки для смешивания аудиофайлов в зависимости от данных положения головки стетоскопа, полученных с помощью указанных по меньшей мере двух датчиков расстояния, чтобы смешанный звуковой сигнал подавался к наушнику симулятора стетоскопа.
23. Симулятор пациента по п. 22, отличающийся тем, что он является симулятором недоношенного ребенка, или новорожденного ребенка, или ребенка.
24. Симулятор пациента по п. 22 или 23, отличающийся тем, что для каждого положения на макете грудной клетки и на макете живота по меньшей мере один звуковой сигнал, представляющий шумы указанного тела в соответствующем положении, является смешиваемым, причем симулятор пациента выполнен с возможностью смешивания указанных шумов по меньшей мере из одного записанного аудиофайла с учетом весовых коэффициентов, зависящих от положения головки стетоскопа, и испускания звукового сигнала в стетоскоп.
25. Симулятор пациента по любому из пп. 22 – 24, отличающийся тем, что устройство обработки для смешивания аудиофайлов предпочтительно выполнено таким образом, чтобы аудиофайл добавлялся к указанному смешиваемому звуковому сигналу с громкостью, которая тем больше, чем меньше расстояние головки стетоскопа от соответствующего указанному аудиофайлу положения.
26. Симулятор пациента по любому из пп. 22 – 25, отличающийся тем, что выполнен с возможностью замены каждого аудиофайла с физиологическим шумом аудиофайлом с патологическим шумом и смешения аудиофайлов для получения звукового сигнала, ассоциированного с положением головки стетоскопа.
27. Симулятор пациента по любому из пп. 22 – 26, отличающийся тем, что по меньшей мере один аудиофайл симулирует сердечный шум и соответствует положению сердца макета грудной клетки; один аудиофайл симулирует первый легочный шум и соответствует положению левой половины легких макета грудной клетки; один аудиофайл симулирует второй легочный шум и соответствует положению правой половины легких макета грудной клетки; и/или один аудиофайл симулирует шум живота и соответствует положению живота макета живота.
28. Симулятор пациента по любому из пп. 22 – 27, отличающийся тем, что симулятор или стетоскоп содержит передатчик ближнего поля, а стетоскоп или симулятор соответственно содержит катушку приемника.
29. Симулятор пациента, содержащий симулятор легких и макет живота, включающие пластину живота, выполненную с возможностью подъема и опускания, приводимую в движение устройством для подъема и опускания, причем устройство управления выполнено с возможностью поднимать пластину живота и одновременно увеличивать сопротивление искусственному дыханию легочной модели.
30. Симулятор пациента по п. 29, отличающийся тем, что он является симулятором недоношенного ребенка, или новорожденного ребенка, или ребенка.
31. Симулятор пациента по п. 29 или 30, отличающийся тем, что макет живота содержит источник света для освещения изнутри макета кожи в области живота.
32. Симулятор пациента, содержащий симулятор легких, макет грудной клетки, включающий элемент грудной клетки, выполненный с возможностью подъема и опускания, приводимый в движение устройством для подъема и опускания, и макет головы, взаимодействующий с механизмом наклона для изменения угла между макетом головы и макетом грудной клетки, причем устройство управления выполнено с возможностью приводить в движение механизм наклона для периодических наклонных перемещений макета головы, причем указанные периодические наклонные перемещения синхронизированы с подъемом и опусканием элемента грудной клетки.
33. Симулятор пациента по п. 32, отличающийся тем, что он является симулятором недоношенного ребенка, или новорожденного ребенка, или ребенка.
34. Симулятор пациента, содержащий симулятор легких, макет грудной клетки, включающий элемент грудной клетки, выполненный с возможностью подъема и опускания, приводимый в движение устройством для подъема и опускания, макет головы, взаимодействующий с механизмом наклона для изменения угла между макетом головы и макетом грудной клетки, а также пользовательский интерфейс и дисплей монитора для установки и отображения параметров искусственного дыхания.
35. Симулятор пациента по п. 34, отличающийся тем, что он является симулятором недоношенного ребенка, или новорожденного ребенка, или ребенка.
| Токарный резец | 1924 |
|
SU2016A1 |
| US 4850876 А, 25.07.1989 | |||
| US 5584701 A, 17.12.1996 | |||
| US 3520071 A, 14.07 | |||
| Кинематографический аппарат | 1923 |
|
SU1970A1 |
| US 2008138779 A1, 12.06.2008 | |||
| US 2014302473 A1, 09.10.2014 | |||
| Станок для диагональной разрезки движущейся ткани | 1957 |
|
SU115539A1 |

