Изобретение относятся к испытательной технике, в частности к стендам для испытаний колесных движителей.
Наиболее близким по технической сущности к заявленному изобретению является «Стенд для испытания одноосного колесного движителя при переменной вертикальной нагрузке и криволинейном движении» [патент на изобретение RU №2284022, МПК: G01M 17/02, G01M 17/013, опубл. 20.09.2006 Бюл. №26], включающий водило, соединяющее опорно-поворотное устройство с рамой, на которой смонтирован привод колесного движителя, а также ведущий мост с исследуемым колесом, который выполнен с дополнительной рамой со вторым колесом, а также загружающим устройством для создания и регулирования переменной нагрузки по величине и частоте, при этом стенд снабжен двумя гидроцилиндрами для снятия вертикальной нагрузки с испытываемых колес и выполнен с возможностью изменения угла установки колесного движителя в плане посредством винтовых тяг и с возможностью изменения радиуса поворота испытываемого колесного движителя посредством втулок, установленных в водиле. Изобретение позволяет производить испытания одноосного колесного движителя с крупногабаритными шинами различных конструкций и моделей при заданных режимах нагружения.
Недостатком данного устройства является ограниченная функциональность стенда, обусловленная проведением испытаний одноосного колесного движителя только по криволинейной траектории.
Техническим результатом изобретения является расширение функциональных возможностей стенда за счет организации дополнительного прямолинейного движения одноосного колесного движителя.
На режимах прямолинейного движения может возникать ситуация, при которой значения линейных скоростей опорно-поворотного устройства и рамы могут отличаться, в результате чего происходит перекос водила и появление угла скольжения колеса, тем самым исследуемые параметры не будут достоверными.
Указанный технический результат достигается тем, что к известному стенду добавлена функция перемещения опорно-поворотного устройства по прямолинейной траектории с возможностью согласования линейных скоростей опорно-поворотного устройства и рамы испытываемого колесного движителя, что позволяет производить испытания одноосного колесного движителя с крупногабаритными шинами различных конструкций и моделей при заданных режимах нагружения как по прямолинейной, так и по криволинейной траектории.
В соответствии с требуемыми условиями испытаний можно изменять величину тормозной и вертикальной нагрузки на одноосный колесный движитель и давать объективную оценку влияния указанных параметров на показатели взаимодействия одноосного колесного движителя с опорной поверхностью.
Сущность изобретения заключается в том, что опорно-поворотное устройство установлено на опорную поверхность с возможностью перемещения по прямолинейной траектории, перпендикулярной продольной оси водила, на расстояние, не менее длины окружности колеса, а также дополнительно введены блок управления, выход которого соединен с входом механизма перемещения по прямолинейной траектории, датчик линейной скорости опорно-поворотного устройства, установленный на опорно-поворотном устройстве, выход которого соединен с первым входом блока управления, и датчик линейной скорости рамы, установленный на раме, выход которого соединен со вторым входом блока управления.
Испытания колесного движителя осуществляются на следующих режимах: «свободный», «ведущий» и «ведомый».
На режимах «свободный» и «ведущий» привод колесного движителя осуществляется механизмом привода движителя, например, электродвигателем, который может устанавливаться на раму и через редуктор и ведущий мост передавать крутящий момент на колеса.
На режиме «ведомый» привод колесного движителя осуществляется от опорно-поворотного устройства, которое соединено с рамой и водилом.
При испытании колесного движителя на режиме «ведомый» по прямолинейной траектории опорно-поворотное устройство устанавливается на движущуюся поверхность, например, тележку, которая для обеспечения прямолинейной траектории может устанавливаться на рельсовые направляющие, длина которых должна превышать длину окружности испытываемого колеса. Привод опорно-поворотного устройства по прямолинейной траектории осуществляется механизмом привода опорно-поворотного устройства по прямолинейной траектории, который может быть выполнен в виде электродвигателя. Знакопеременный крутящий момент от электродвигателя преобразуется в возвратно-поступательное движение тележки, например, за счет цевкового зацепления. Для обеспечения равных значений линейных скоростей опорно-поворотного устройства и рамы применяются датчик линейной скорости опорно-поворотного устройства, датчик линейной скорости рамы, а также блок управления.
Датчик линейной скорости опорно-поворотного устройства, который может устанавливаться на опорно-поворотное устройство, и датчик линейной скорости рамы, который может устанавливаться на раму, могут быть, например, оптическими и предназначены для получения соответствующих показателей с последующей передачей их в виде сигнала в блок управления.
В блок управления, который может быть выполнен в виде микроконтроллера, от датчика линейной скорости опорно-поворотного устройства и от датчика линейной скорости рамы передаются соответствующие сигналы, после обработки которых вырабатывается сигнал управления, действующий на механизм привода опорно-поворотного устройства для прямолинейного движения. Если значения линейных скоростей равны, то сигнал управления не вырабатывается; если значения линейных скоростей отличаются друг от друга, то вырабатывается сигнал управления, в результате чего линейная скорость опорно-поворотного устройства будет изменяться (ускоряться или замедляться) до момента выравнивания линейных скоростей опорно-поворотного устройства и рамы.
При испытании колесного движителя по криволинейной траектории с заданным радиусом на всех режимах опорно-поворотное устройство жестко фиксируется к опорной поверхности, например, стопорным механизмом, который может быть выполнен в виде рычажно-болтового соединения. На режиме «ведомый» привод опорно-поворотного устройства по криволинейной (круговой) траектории осуществляется механизмом привода опорно-поворотного устройства по криволинейной траектории, который может быть выполнен в виде электродвигателя. Блок управления вырабатывает сигнал управления на механизм привода опорно-поворотного устройства по криволинейной траектории, задавая ему угловую скорость.
При проведении испытаний колесного движителя по криволинейной траектории обеспечивается равномерность дорожного покрытия, например, частичной разборкой рельсовых направляющих тележки опорно-поворотного устройства.
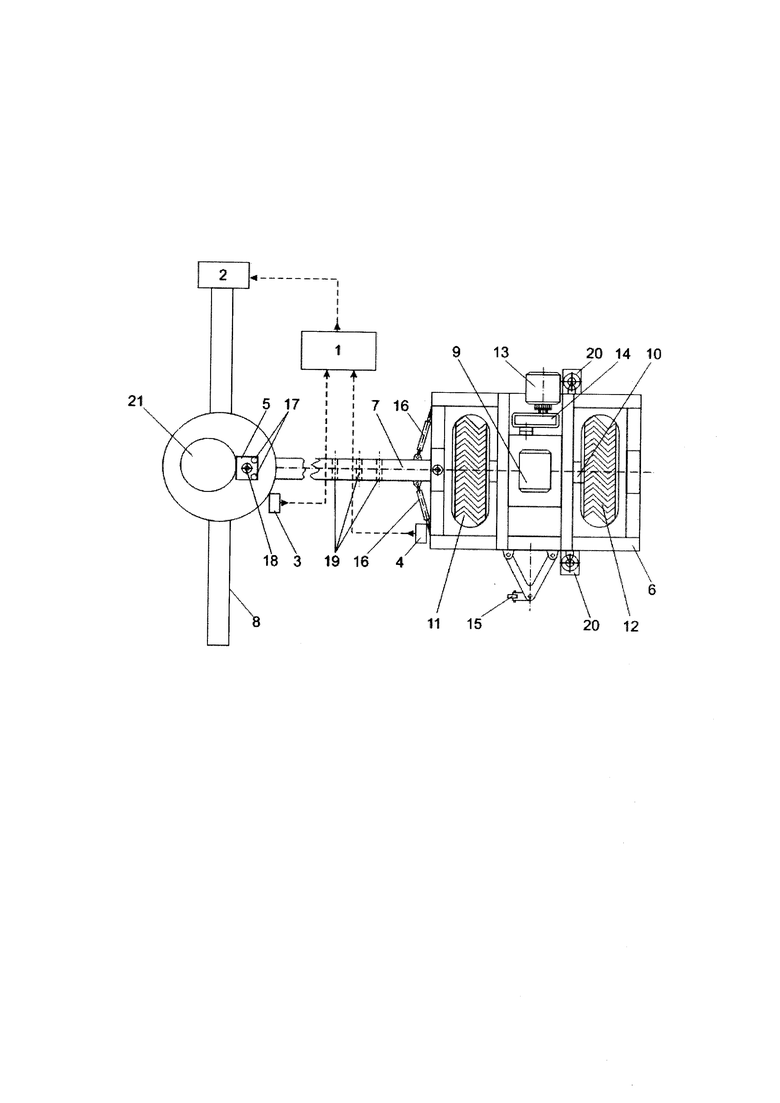
Схема предлагаемого стенда для испытания одноосного колесного движителя с крупногабаритными пневматическими шинами представлена на фиг., где: 1 - блок управления; 2 - механизм привода опорно-поворотного устройства для прямолинейного движения; 3 - датчик линейной скорости опорно-поворотного устройства; 4 - датчик линейной скорости рамы; 5 - опорно-поворотное устройство; 6 - рама; 7 - водило; 8 - рельсовая опорная поверхность; 9 - специальное загружающие устройство; 10 - ведущий мост; 11, 12 - крупного габаритные пневматические шины; 13 - механизм привода движителя; 14 - редуктор; 15 - тензометрическая тяга; 16 - винтовые тяги; 17 - винты; 18 - шарниры; 19 - втулки; 20 - механизм снятия вертикальной нагрузки; 21 - механизм привода опорно-поворотного устройства для криволинейного движения.
Предлагаемый стенд работает следующим образом.
В «свободном» и «ведущем» режимах при криволинейном и прямолинейном движени испытываемый одноосный колесный движитель приводится в движение включением механизма привода движителя 13. От него крутящий момент через редуктор 14 и ведущий мост 10 передается на колеса 11, 12. При испытании в «ведущем» режиме к движителю через тензометрическую тягу 15 дополнительно прикладывается тормозное усилие. Тормозная нагрузка может изменяться от 0 до максимальной, при которой линейная скорость движителя будет равна 0, что обуславливается 100% буксованием колесного движителя.
В «ведомом» режиме при криволинейном движении опорно-поворотное устройство 5 приводится во вращательное движение включением механизма привода опорно-поворотного устройства для криволинейного движения 21, усилие передается к раме 6 через водило 7, а специальное загружающее устройство 9 создает вертикальную переменную нагрузку.
В «ведомом» режиме при прямолинейном движении опорно-поворотное устройство 5, установленное на рельсовую опорную поверхность 8, приводится в движение механизмом привода опорно-поворотного устройства для прямолинейного движения 2, усилие передается к раме 6 через водило 7, а специальное загружающее устройство 9 создает вертикальную переменную нагрузку.
При прямолинейном движении на всех режимах от датчика линейной скорости 4, установленного на раме 6, и от датчика линейной скорости опорно-поворотного устройства 3, установленного на опорно-поворотном устройстве 5, поступают сигналы в блок управления 1, где они сравниваются. Если значения линейных скоростей рамы 6 и опорно-поворотного устройства 5 равны, то блоком управления 1 сигнал управления не вырабатывается, а если не равны - то блоком управления 1 вырабатывается сигнал управления, который либо ускоряет, либо замедляет механизм привода опорно-поворотного устройства для прямолинейного движения 2.
Стенд снабжен механизмом снятия вертикальных нагрузок 20 с колес 11 и 12, винтовыми тягами 16, позволяющими изменять угол установки движителя в плане, а также винтами 17, связанными с шарниром 18 и позволяющими изменять угол развала. Втулками 19 устанавливается длина водила 7, определяющая радиус поворота одноосного колесного движителя.
При проведении испытаний колесного движителя по криволинейной траектории опорно-поворотное устройство 5 жестко фиксируется к рельсовой опорной поверхности 2, которая может частично разбираться для обеспечения равномерного дорожного покрытия.
Применение стенда позволяет производить испытания одноосного колесного движителя с крупногабаритными шинами различных конструкций и моделей при заданных режимах нагружения. В соответствии с требуемыми условиями испытаний можно изменять величину тормозной и вертикальной нагрузки на одноосный колесный движитель и давать объективную оценку влияния указанных параметров на показатели взаимодействия одноосного колесного движителя, снабженного крупногабаритными шинами, с различными опорными поверхностями при прямолинейном и криволинейном движении.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ВЛИЯНИЯ БОКОВОЙ СИЛЫ НА ТЯГОВЫЕ КАЧЕСТВА ОДНООСНОГО КОЛЕСНОГО ДВИЖИТЕЛЯ | 2020 |
|
RU2744344C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ОДНООСНОГО КОЛЕСНОГО ДВИЖИТЕЛЯ ПРИ ПЕРЕМЕННОЙ ВЕРТИКАЛЬНОЙ НАГРУЗКЕ И КРИВОЛИНЕЙНОМ ДВИЖЕНИИ | 2003 |
|
RU2284022C2 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ДВИЖЕНИЯ НАГРУЖЕННОГО МОБИЛЬНОГО РОБОТА ПРИ НАЛИЧИИ ПРОСКАЛЬЗЫВАНИЯ КОЛЁС | 2017 |
|
RU2670352C1 |
| УСТРОЙСТВО ДЛЯ ЭКСПРЕСС-АНАЛИЗА ТЯГОВО-СЦЕПНЫХ СВОЙСТВ ДВИЖИТЕЛЕЙ ТРАКТОРОВ | 1995 |
|
RU2096747C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765514C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765163C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765322C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765193C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765388C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765195C1 |
Опорно-поворотное устройство установлено на опорную поверхность с возможностью перемещения по прямолинейной траектории, перпендикулярной продольной оси водила, на расстояние не менее длины окружности колеса, а также дополнительно введены блок управления, выход которого соединен с входом механизма перемещения по прямолинейной траектории, датчик линейной скорости опорно-поворотного устройства, установленный на опорно-поворотном устройстве, выход которого соединен с первым входом блока управления, и датчик линейной скорости рамы, установленный на раме, выход которого соединен со вторым входом блока управления. Технический результат - расширение функциональных возможностей стенда за счет организации дополнительного прямолинейного движения одноосного колесного движителя. 1 ил.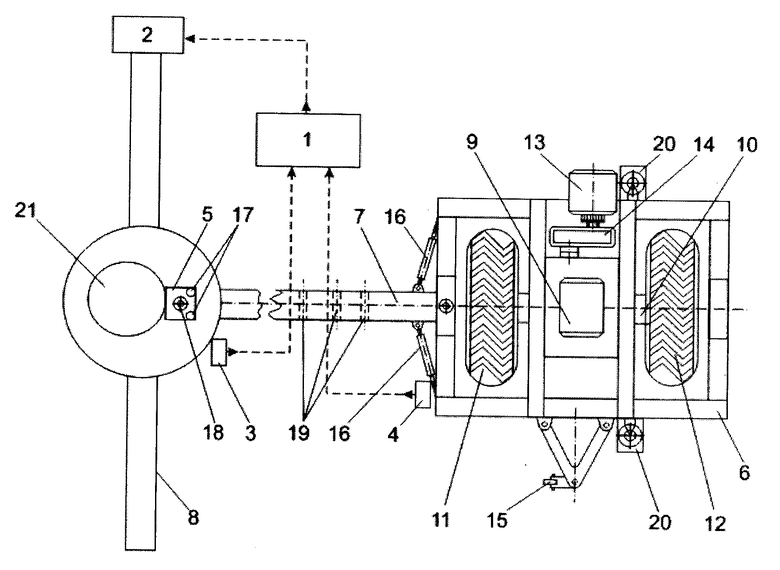
Стенд, содержащий опорно-поворотное устройство и раму, соединенные между собой водилом, на раме смонтированы привод колесного движителя, ведущий мост с закрепленными на нем колесами, загружающее устройство и механизм снятия вертикальной нагрузки с испытываемых колес, стенд выполнен с возможностью изменения угла установки колесного движителя в плане и с возможностью изменения радиуса поворота испытываемого колесного движителя, отличающийся тем, что опорно-поворотное устройство установлено на опорную поверхность с возможностью перемещения по прямолинейной траектории, перпендикулярной продольной оси водила, на расстояние не менее длины окружности колеса, а также дополнительно введены блок управления, выход которого соединен с входом механизма перемещения по прямолинейной траектории, датчик линейной скорости опорно-поворотного устройства, установленный на опорно-поворотном устройстве, выход которого соединен с первым входом блока управления, и датчик линейной скорости рамы, установленный на раме, выход которого соединен со вторым входом блока управления.
| СТЕНД ДЛЯ ИСПЫТАНИЯ ОДНООСНОГО КОЛЕСНОГО ДВИЖИТЕЛЯ ПРИ ПЕРЕМЕННОЙ ВЕРТИКАЛЬНОЙ НАГРУЗКЕ И КРИВОЛИНЕЙНОМ ДВИЖЕНИИ | 2003 |
|
RU2284022C2 |
| Стенд для испытания пневматических шин | 1987 |
|
SU1580211A1 |
| СПОСОБ МОДЕЛИРОВАНИЯ СОЧЕТАННОГО МЕДИКАМЕНТОЗНОГО ПОРАЖЕНИЯ СЕРДЦА И ПОЧЕК У КРЫС | 2019 |
|
RU2726927C1 |

