Область техники
[0001] Настоящая технология относится к беспилотным автомобилям и, в частности, к способам и системам для прогнозирования (предсказания) маневра объекта.
Уровень техники
[0002] Несколько компьютерных навигационных систем, которые выполнены с возможностью содействия в навигации и/или управлении транспортным средством, были предложены и реализованы в предшествующем уровне техники. Эти системы варьируются от более простых решений на основе картографической локализации, т.e. использования компьютерной системы для помощи водителю в навигации по маршруту от начальной точки до точки назначения, к более сложным - компьютерные и/или автономные системы вождения.
[0003] Некоторые из этих систем реализованы как так называемые системы «круиз-контроля» (автоматического поддержания скорости). В этих системах компьютерная система, установленная на транспортных средствах, поддерживает скорость транспортного средства, установленную пользователем. Некоторые системы круиз-контроля реализуют систему «интеллектуального управления расстоянием», посредством которой пользователь может установить расстояние до потенциального автомобиля впереди (например, выбрать значение, выраженное в количестве транспортных средств), а компьютерная система регулирует скорость транспортного средства по меньшей мере частично на основе транспортного средства, приближающегося к потенциальному транспортному средству впереди на заранее определенное расстояние. Некоторые из систем круиз-контроля дополнительно оснащены системой контроля столкновений, которая при обнаружении транспортного средства (или другого препятствия) перед движущимся транспортным средством замедляет или останавливает транспортное средство.
[0004] Некоторые из более совершенных систем обеспечивают полностью автономное вождение транспортного средства без прямого управления со стороны оператора (т.е. водителя), так называемые беспилотные автомобили (SDC). Данный SDC включает в себя компьютерные системы, которые могут инструктировать SDC ускоряться, тормозить, останавливаться, менять полосу движения и самостоятельно парковаться.
[0005] Безопасная компьютерная система может потребовать планирования безопасной траектории для SDC на основе окружения. Окружение SDC может быть очень динамичным, поскольку оно может включать в себя объекты (например, другие транспортные средства, включая другие двухколесные, четырехколесные или многоколесные транспортные средства, человека, идущего по дороге, и т.п.), которые могут уже находиться в движения или начинают двигаться, когда они находятся рядом с SDC.
[0006] Например, «US 2020/0172093 A1» раскрывает вероятностное прогнозирование движения окружающего транспортного средства на основе полосы движения, а также способ и устройство управления в продольном направлении, использующие его. Способ включает в себя получение информации об окружающем транспортном средстве с использованием датчика, прогнозирование целевой полосы движения для окружающего транспортного средства на основе полученной информации об окружающем транспортном средстве, выполнение прогнозирования будущей траектории движения для каждой целевой полосы движения на основе информации об окружающем транспортном средстве и вычисление вероятности столкновения на основании прогнозирования целевой полосы движения и траектории окружающего транспортного средства, в котором учтена будущая неопределенность, и выполняется продольное управление для предотвращения столкновений.
[0007] «US 10,173,685 B2» раскрывает систему управления, которая адаптирована для применения в транспортном средстве и предназначена для обнаружения следующих транспортных средств на основе данных об окружающей среде, которые получены от одного или нескольких датчиков окружающей среды, расположенных на транспортном средстве и отражающих площадь впереди, сбоку и/или позади от транспортного средства. Система управления выполнена с возможностью обнаружения курса собственной полосы движения транспортного средства и сохранения его на заранее определенном участке дороги, а также обнаружения одного или нескольких других транспортных средств, участвующих в движении позади собственного транспортного средства, с помощью датчиков окружающей среды. Полоса движения, связанная с каждым другим транспортным средством, по которой едет(ут) другое(ие) транспортное(ые) средство(а), определяется с учетом сохраненного курса собственной полосы движения. Определяется занятость собственной полосы движения и/или по меньшей мере одной соседней полосы движения другим(и) транспортным(и) средством(ами).
[0008] «US 10,345,815 B2» раскрывает планирование движения для первого транспортного средства, содержащее: оценку прошлых состояний наблюдаемого второго транспортного средства на основе входных сигналов датчиков; прогнозирование будущей траектории второго транспортного средства на основе оцененных прошлых состояний; планирование будущей траектории первого транспортного средства на основе прогнозируемой будущей траектории второго транспортного средства и функции стоимости безопасности; и вождение первого транспортного средства по запланированной траектории.
[0009] Одна из технических проблем при реализации вышеупомянутых компьютерных систем состоит в том, чтобы выполнить безопасный маневр и при этом избежать столкновения SDC с другими объектами.
Сущность изобретения
[0010] Задачей настоящей технологии является устранение по меньшей мере некоторых неудобств, имеющихся в предшествующем уровне техники. Варианты осуществления настоящей технологии могут обеспечивать и/или расширять объем подходов к способам достижения целей и задач настоящей технологии.
[0011] Разработчики данной технологии осознали, что присутствие объектов, движущихся поблизости от SDC, увеличивает риск столкновения с SDC. Поэтому желательно использовать различные системы датчиков SDC для сбора информации о движении динамических объектов и анализа этих данных для определения предполагаемых траекторий этих динамических объектов. Это может позволить учитывать прогнозируемые траектории динамических объектов при управлении работой SDC, чтобы снизить риск столкновения между SDC и одним или несколькими динамическими объектами в его окружении. Чтобы добавить степень свободы для адаптации к различным неизбежным сценариям на дороге, прогнозируемые траектории генерируются без учета границ полос движения. После того, как спрогнозированные траектории были сгенерированы, спрогнозированные траектории затем отображаются на соответствующие полосы движения.
[0012] Следовательно, можно сказать, что по меньшей мере в некоторых вариантах осуществления настоящей технологии разработчики настоящей технологии разработали способы и устройства для прогнозирования маневра по меньшей мере одного объекта, причем по меньшей мере один объект находится поблизости от SDC, и использования прогнозируемого маневра объектов с целью снижения риска столкновений между объектами и SDC.
[0013] В первом широком аспекте настоящей технологии предоставляется способ прогнозирования маневра по меньшей мере одного объекта, причем по меньшей мере один объект находится поблизости от беспилотного автомобиля (SDC), причем SDC соединен с возможностью осуществления связи с электронным устройством, причем способ выполняется электронным устройством, причем способ включает в себя: прием электронным устройством участка дорожной карты, соответствующего окружению SDC и по меньшей мере одному объекту, причем участок дорожной карты включает в себя информацию о множестве полос движения; генерирование с помощью электронного устройства множества прогнозируемых траекторий, связанных по меньшей мере с одним объектом, причем каждая из множества прогнозируемых траекторий включает в себя точки потенциального будущего местоположения по меньшей мере одного объекта на участке дорожной карты; для данной одной из множества прогнозируемых траекторий наложение с помощью электронного устройства точек потенциального будущего местоположения, связанных с данной одной из множества прогнозируемых траекторий, на участок дорожной карты в соответствии с информацией о множестве полос движения; вычисление с помощью электронного устройства оценок для каждой из точек потенциального будущего местоположения, связанных с данной одной из множества прогнозируемых траекторий, причем оценки представляют связь данной точки потенциального будущего местоположения из точек потенциального будущего местоположения с множеством полос движения в будущий момент времени; вычисление с помощью электронного устройства совокупной оценки из оценок, соответствующих заданной точке потенциального будущего местоположения из точек потенциального будущего местоположения, связанных с данной одной из множества прогнозируемых траекторий; и на основе совокупной оценки определение с помощью электронного устройства прогнозируемого местоположения в пределах множества полос движения для по меньшей мере одного объекта в будущий момент времени.
[0014] В некоторых вариантах осуществления способа информация о множестве полос движения включает в себя одно или более из следующего: количество множества полос движения на участке дорожной карты; геометрические свойства множества полос движения, причем геометрические свойства множества полос движения включают в себя одно или более из следующего: ширина каждой из множества полос движения, кривизна каждой из множества полос движения; количество выездов на участке дорожной карты; отметка на участке дорожной карты, обозначающая одно или более из следующего: первое указание поворота налево или направо, второе указание выезда, разделение между множеством полос движения.
[0015] В некоторых вариантах осуществления способа участок дорожной карты представляет собой карту высокой четкости (HD).
[0016] В некоторых вариантах осуществления способа множество прогнозируемых траекторий генерируется без учета множества полос движения на участке дорожной карты.
[0017] В некоторых вариантах осуществления способа множество прогнозируемых траекторий основано на данных движения по меньшей мере одного объекта.
[0018] В некоторых вариантах осуществления способа наложение точек потенциального будущего местоположения на участок дорожной карты содержит наложение точек потенциального будущего местоположения, связанных с данной одной из множества прогнозируемых траекторий, на множество полос движения.
[0019] В некоторых вариантах осуществления способа наложение точек потенциального будущего местоположения на участок дорожной карты содержит генерирование множества гипотез, при этом данная гипотеза из множества гипотез представляет взаимосвязь данной точки потенциального будущего местоположения из точек потенциального будущего местоположения с множеством полос движения.
[0020] В некоторых вариантах осуществления способа совокупная оценка вычисляется как одно или более из следующего: суммирование оценок, присвоенных данной точке потенциального будущего местоположения, связанной с данной одной из множества прогнозируемых траекторий, в соответствии с множеством гипотез; среднее значение оценок, присвоенных данной точке потенциального будущего местоположения, связанной с данной одной из множества прогнозируемых траекторий, в соответствии с множеством гипотез.
[0021] В некоторых вариантах осуществления способа вычисление оценки дополнительно включает в себя: присвоение первой заранее определенной оценки данной точке потенциального будущего местоположения, если данная точка потенциального будущего местоположения и по меньшей мере одна из следующей точки потенциального будущего местоположения и предыдущей точки потенциального будущего местоположения расположены на той же полосе движения из множества полос дорог, в которой расположена данная точка потенциального будущего местоположения; и присвоение второй заранее заданной оценки данной точке потенциального будущего местоположения, если данная точка потенциального будущего местоположения не расположена на той же полосе движения из множества полос движения, в которой расположены следующая точка потенциального будущего местоположения или предыдущая точка потенциального будущего местоположения.
[0022] В некоторых вариантах осуществления способа первая заранее заданная оценка выше, чем вторая заранее заданная оценка.
[0023] В некоторых вариантах осуществления способа способ дополнительно включает в себя регулировку электронным устройством параметров вождения SDC в соответствии с прогнозируемым местоположением по меньшей мере одного объекта в будущий момент времени.
[0024] В некоторых вариантах осуществления способа регулировка параметров вождения SDC включает в себя одно или более из следующего: изменение ускорения SDC; изменение скорости SDC; изменение направления SDC для изменения полосы движения из множества полос движения, по которой SDC в настоящее время движется; изменение направления SDC для поворота.
[0025] В некоторых вариантах осуществления способа SDC и по меньшей мере один объект движутся по меньшей мере в одном из следующих направлений: в одном и том же направлении; в противоположном направлении.
[0026] В некоторых вариантах осуществления способа вычисление оценок для каждой из точек потенциального будущего местоположения включает в себя: использование алгоритма машинного обучения (MLA), в котором точки потенциального будущего местоположения используются в качестве входных данных, а выходными данными MLA являются оценки, соответствующие данной точке потенциального будущего местоположения из точек потенциального будущего местоположения.
[0027] В некоторых вариантах осуществления способа более высокая совокупная оценка, связанная с данной точкой потенциального будущего местоположения, является характерной для маловероятной быстрой смены полосы движения по меньшей мере одного объекта между последовательными периодами времени с малым приращением изменения времени между ними; более низкая совокупная оценка, связанная с данной точкой потенциального будущего местоположения, является характерной для маловероятного зигзагообразного поведения по меньшей мере одного объекта между последовательными периодами времени с малым приращением изменения времени между ними.
[0028] В некоторых вариантах осуществления способа объект представляет собой динамический объект.
[0029] В некоторых вариантах осуществления способа прогнозируемое местоположение является одной из точек потенциального будущего местоположения.
[0030] В некоторых вариантах осуществления способа прогнозируемое местоположение находится в одном или нескольких из следующего: конец данной одной из множества прогнозируемых траекторий; начало данной одной из множества прогнозируемых траекторий; первая точка будущего местоположения, связанная с данной одной из множества прогнозируемых траекторий, расположенная на полосе движения из множества полос движения, по которой движется SDC.
[0031] Во втором широком аспекте настоящей технологии предоставляется электронное устройство для прогнозирования маневра по меньшей мере одного объекта, причем по меньшей мере один объект находится поблизости от беспилотного автомобиля (SDC), причем электронное устройство соединено с возможностью осуществления связи с SDC, причем электронное устройство выполнено с возможностью: принимать участок дорожной карты, соответствующий окружению SDC и по меньшей мере одному объекту, причем участок дорожной карты включает в себя информацию о множестве полос движения; генерировать множество прогнозируемых траекторий, связанных по меньшей мере с одним объектом, причем каждая из множества прогнозируемых траекторий включает в себя точки потенциального будущего местоположения по меньшей мере одного объекта на участке дорожной карты; для данной одной из множества прогнозируемых траекторий накладывать точки потенциального будущего местоположения, связанные с данной одной из множества прогнозируемых траекторий, на участок дорожной карты, в соответствии с информацией о множестве полос движения; вычислять оценки для каждой из точек потенциального будущего местоположения, связанных с данной одной из множества прогнозируемых траекторий, причем оценки представляют связь данной точки потенциального будущего местоположения из точек потенциального будущего местоположения с множеством полос движения в будущий момент времени; вычислять совокупную оценку из оценок, соответствующих данной точке потенциального будущего местоположения из точек потенциального будущего местоположения, связанных с данной одной из множества прогнозируемых траекторий; и на основе совокупной оценки определять прогнозируемое местоположение в пределах множества полос движения для по меньшей мере одного объекта в будущий момент времени.
[0032] В некоторых вариантах осуществления электронного устройства электронное устройство генерирует множество прогнозируемых траекторий без учета множества полос движения на участке дорожной карты.
[0033] В контексте настоящего описания «сервер» - это компьютерная программа, которая выполняется на соответствующем аппаратном обеспечении и способна принимать запросы (например, от клиентских устройств) по сети и выполнять эти запросы или вызывать выполнение этих запросов. Аппаратное обеспечение может быть реализовано как один физический компьютер или одна физическая компьютерная система, но ни то, ни другое не требуется в отношении настоящей технологии. В данном контексте использование выражения «сервер» не предназначено для обозначения того, что каждая задача (например, принятые инструкции или запросы) или любая конкретная задача была принята, выполнена или вызвана к выполнению тем же сервером (то есть тем же программным обеспечением и/или аппаратным обеспечением); это означает, что любое количество программных элементов или аппаратных устройств может быть вовлечено в прием/отправку, выполнение или обеспечение выполнения любой задачи или запроса или последствий любой задачи или запроса; и все это программное и аппаратное обеспечение может быть одним сервером или несколькими серверами, оба случая из которых включены в выражение «по меньшей мере один сервер».
[0034] В контексте настоящего описания «электронное устройство» - это любое компьютерное оборудование, которое способно запускать программное обеспечение, подходящее для соответствующей решаемой задачи. В контексте настоящего описания термин «электронное устройство» подразумевает, что устройство может функционировать как сервер для других электронных устройств и клиентских устройств, однако это не обязательно в отношении настоящей технологии. Таким образом, некоторые (не ограничивающие) примеры электронных устройств включают в себя персональные компьютеры (настольные компьютеры, ноутбуки, нетбуки и т.д.), смартфоны и планшеты, а также сетевое оборудование, такое как маршрутизаторы, коммутаторы и шлюзы. Следует понимать, что в данном контексте тот факт, что устройство функционирует как электронное устройство, не означает, что оно не может функционировать как сервер для других электронных устройств. Использование выражения «электронное устройство» не исключает использования нескольких клиентских устройств для приема/отправки, выполнения или обеспечения выполнения любой задачи или запроса или последствий любой задачи или запроса, или этапов любого способа, описанных здесь.
[0035] В контексте настоящего описания «клиентское устройство» - это любое компьютерное оборудование, которое способно запускать программное обеспечение, подходящее для соответствующей решаемой задачи. В контексте настоящего описания термин «клиентское устройство» обычно ассоциируется с пользователем клиентского устройства. Таким образом, некоторые (не ограничивающие) примеры клиентских устройств включают в себя персональные компьютеры (настольные компьютеры, ноутбуки, нетбуки и т.д.), смартфоны и планшеты, а также сетевое оборудование, такое как маршрутизаторы, коммутаторы и шлюзы. Следует отметить, что устройству, действующему как клиентское устройство в данном контексте, не запрещается действовать как сервер для других клиентских устройств. Использование выражения «клиентское устройство» не исключает использования нескольких клиентских устройств для приема/отправки, выполнения или обеспечения выполнения любой задачи или запроса или последствий любой задачи или запроса, или этапов любого способа, описанных здесь.
[0036] В контексте настоящего описания выражение «информация» включает в себя информацию любого характера или вида, которая может быть сохранена в базе данных. Таким образом, информация включает в себя, но без ограничения, аудиовизуальные произведения (изображения, фильмы, звуковые записи, презентации и т.д.), данные (данные о местоположении, численные данные и т.д.), текст (мнения, комментарии, вопросы, сообщения и т.д.), документы, электронные таблицы и т.д.
[0037] В контексте настоящего описания выражение «программный компонент» подразумевает включение программного обеспечения (подходящего для конкретного аппаратного контекста), которое является одновременно необходимым и достаточным для выполнения конкретной(ых) функции(й), на которую делается ссылка.
[0038] В контексте настоящего описания выражение «компьютерный носитель информации» (также называемый «носитель информации») предназначен для включения носителей любого характера и типа, включая, без ограничения, RAM, ROM, диски (CD-ROM, DVD, дискеты, жесткие диски и т.д.), USB-ключи, твердотельные накопители, ленточные накопители и т.д. Множество компонентов могут быть объединены для формирования компьютерных носителей информации, включая два или более компонентов носителей одного типа и/или два или более компонентов носителей разных типов.
[0039] В контексте настоящего описания «база данных» представляет собой любой структурированный набор данных, независимо от его конкретной структуры, программного обеспечения для управления базой данных или компьютерного оборудования, на котором данные хранятся, реализованный или иным образом предоставленный для использования. База данных может находиться на том же аппаратном обеспечении, что и процесс, который хранит или использует информацию, хранящуюся в базе данных, или она может находиться на отдельном аппаратном обеспечении, например на выделенном сервере или множестве серверов.
[0040] В контексте настоящего описания слова «первый», «второй», «третий» и т.д. использовались в качестве прилагательных только с целью обеспечения различия между существительными, которые они изменяют относительно друг друга, а не для цели описания каких-либо конкретных отношений между этими существительными. Таким образом, например, следует понимать, что использование терминов «первая база данных» и «третий сервер» не предназначено для обозначения какого-либо конкретного порядка, типа, хронологии, иерархии или ранжирования (например) серверов/между серверами и их использование (само по себе) не подразумевает, что любой «второй сервер» обязательно должен существовать в любой данной ситуации. Кроме того, как обсуждается здесь в других контекстах, ссылка на «первый» элемент и «второй» элемент не препятствует тому, чтобы эти два элемента были одним и тем же фактическим элементом реального мира. Таким образом, например, в некоторых случаях «первый» сервер и «второй» сервер могут быть одним и тем же программным и/или аппаратным компонентами, в других случаях они могут быть разными программными и/или аппаратными компонентами.
[0041] Каждая реализация настоящей технологии имеет по меньшей мере один из вышеупомянутых объектов и/или аспектов, но не обязательно имеет все из них. Следует понимать, что некоторые аспекты настоящей технологии, которые возникли в попытке достичь вышеупомянутой цели, могут не удовлетворять этой цели и/или удовлетворять другим целям, которые не описаны в данном документе явным образом.
[0042] Дополнительные и/или альтернативные признаки, аспекты и преимущества реализаций настоящей технологии станут очевидными из нижеследующего описания, сопроводительных чертежей и приложенной формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0043] Эти и другие признаки, аспекты и преимущества настоящей технологии станут более понятными из нижеследующего описания, приложенной формулы изобретения и сопроводительных чертежей, на которых:
[0044] Фиг.1 изображает принципиальную схему примерной компьютерной системы для реализации определенных вариантов осуществления систем и/или способов настоящей технологии;
[0045] Фиг.2 изображает сетевую вычислительную среду, подходящую для использования с некоторыми вариантами осуществления настоящей технологии;
[0046] Фиг.3 изображает принципиальную схему электронного устройства для реализации различных вариантов осуществления настоящей технологии;
[0047] Фиг.4 - схематическая блок-схема способа определения местоположения по меньшей мере одного объекта в соответствии с различными вариантами осуществления настоящей технологии; и
[0048] Фиг.5 изображает участок дорожной карты в репрезентативном сценарии, используемом в различных способах и процессах в соответствии с различными вариантами осуществления настоящей технологии;
[0049] Фиг.6 изображает часть участка дорожной карты, используемого в различных способах и процессах в соответствии с различными неограничивающими вариантами осуществления настоящей технологии.
Подробное описание
[0050] Приведенные в данном документе примеры и условные формулировки призваны главным образом помочь читателю понять принципы настоящей технологии, а не ограничить ее объем такими конкретно приведенными примерами и условиями. Должно быть понятно, что специалисты в данной области смогут разработать различные механизмы, которые, хоть и не описаны в данном документе явным образом, тем не менее воплощают принципы настоящей технологии и включаются в ее суть и объем.
[0051] Кроме того, нижеследующее описание может описывать реализации настоящей технологии в относительно упрощенном виде для целей упрощения понимания. Специалисты в данной области поймут, что различные реализации настоящей технологии могут иметь большую сложность.
[0052] В некоторых случаях также могут быть изложены примеры модификаций настоящей технологии, которые считаются полезными. Это делается лишь для содействия пониманию и, опять же, не для строгого определения объема или очерчивания границ настоящей технологии. Эти модификации не являются исчерпывающим списком, и специалист в данной области может осуществлять другие модификации, все еще оставаясь при этом в рамках объема настоящей технологии. Кроме того, случаи, когда примеры модификаций не приводятся, не следует толковать так, что никакие модификации не могут быть осуществлены и/или что описанное является единственным способом реализации такого элемента настоящей технологии.
[0053] Более того, все утверждения в данном документе, излагающие принципы, аспекты и реализации технологии, а также их конкретные примеры, предназначены для охвата как их структурных, так и функциональных эквивалентов, независимо от того, известны они в настоящее время или разрабатываются в будущем. Таким образом, например, специалисты в данной области осознают, что любые блок-схемы в данном документе представляют концептуальные виды иллюстративной схемы, воплощающей принципы настоящей технологии.
[0054] Аналогичным образом, будет понятно, что любые блок-схемы, схемы последовательности операций, схемы изменения состояний, псевдо-коды и подобное представляют различные процессы, которые могут быть по сути представлены на считываемых компьютерам носителях и исполнены компьютером или процессором вне зависимости от того, показан такой компьютер или процессор явным образом или нет.
[0055] Функции различных элементов, показанных на фигурах, включая любой функциональный блок, обозначенный как «процессор», могут быть обеспечены за счет использования специализированного аппаратного обеспечения, а также аппаратного обеспечения, способного выполнять программное обеспечение в сочетании с соответствующим программным обеспечением. При обеспечении процессором функции могут быть обеспечены одним выделенным процессором, одним совместно используемым процессором или множеством отдельных процессоров, некоторые из которых могут быть совместно используемыми.
[0056] Кроме того, явное использование термина "процессор" или "контроллер" не должно истолковываться как относящееся исключительно к аппаратному обеспечению, способному исполнять программное обеспечение, и может в неявной форме включать в себя, без ограничений, аппаратное обеспечение цифрового сигнального процессора (DSP), сетевой процессор, интегральную схему специального назначения (ASIC), программируемую пользователем вентильную матрицу (FPGA), постоянную память (ROM) для хранения программного обеспечения, оперативную память (RAM) и энергонезависимое хранилище. Другое аппаратное обеспечение, традиционное и/или специализированное, также может быть включено в состав.
[0057] Программные модули, или просто модули, в качестве которых может подразумеваться программное обеспечение, могут быть представлены в настоящем документе как любая комбинация элементов блок-схемы последовательности операций или других элементов, указывающих выполнение этапов процесса и/или текстовое описание. Такие модули могут выполняться аппаратным обеспечением, которое явно или неявно показано.
[0058] Учитывая эти основополагающие вещи, рассмотрим некоторые неограничивающие примеры, чтобы проиллюстрировать различные реализации аспектов настоящей технологии.
Компьютерная система
[0059] Ссылаясь первоначально на Фиг.1, изображена компьютерная система 100, подходящая для использования с некоторыми реализациями настоящей технологии, причем компьютерная система 100 содержит различные аппаратные компоненты, включая один или несколько одноядерных или многоядерных процессоров, совместно представленных процессором 110, твердотельный накопитель 120, память 130, которая может быть памятью с произвольным доступом или любым другим типом памяти. Связь между различными компонентами компьютерной системы 100 может быть обеспечена одной или несколькими внутренними и/или внешними шинами (не показаны) (например, шиной PCI, универсальной последовательной шиной, шиной Firewire IEEE 1394, шиной SCSI, шиной Serial-ATA и т.д.), с которыми различные аппаратные компоненты электронным образом связаны.
[0060] По меньшей мере в некоторых вариантах осуществления настоящей технологии твердотельный накопитель 120 хранит программные инструкции, подходящие для загрузки в память 130 и выполнения процессором 110 для определения присутствия объекта. объекта. Например, программные инструкции могут быть частью приложения управления транспортным средством, выполняемого процессором 110.
[0061] По меньшей мере, в некоторых вариантах осуществления настоящей технологии предполагается, что компьютерная система 100 может иметь дополнительные и/или необязательные компоненты, такие как сетевой модуль 140 связи для связи через сеть связи (например, сеть 240 связи, изображенную на фиг. 2) с другими электронными устройствами и/или серверами, модулями локализации (не показаны) и т.п.
Сетевая компьютерная среда
[0062] Фиг.2 иллюстрирует сетевую компьютерную среду 200, подходящую для использования с некоторыми вариантами осуществления систем и/или способов настоящей технологии. Сетевая компьютерная среда 200 содержит электронное устройство 210, связанное с беспилотным автомобилем (SDC) 220 или связанное с пользователем (не изображенным), который может управлять SDC 220, сервер 235, поддерживающий связь с электронным устройством 210 через сеть 240 связи (например, Интернет и т.п., как будет более подробно описано ниже). Опционально, сетевая компьютерная среда 200 может также включать в себя спутник GPS (не показан), передающий и/или принимающий сигнал GPS на/от электронного устройства 210. Следует понимать, что настоящая технология не ограничивается GPS и может использовать технологию определения местоположения, отличную от GPS. Следует отметить, что спутник GPS можно вообще не использовать.
[0063] SDC 220, с которым связано электронное устройство 210, может включать в себя любое средство передвижения или транспортное средство, такое как частный или коммерческий автомобиль, грузовик, мотоцикл и т.п. Транспортное средство может управляться пользователем или без водителя. Следует отметить, что конкретные параметры SDC 220 не являются ограничивающими, эти конкретные параметры включают в себя: производителя транспортного средства, модель транспортного средства, год выпуска транспортного средства, вес транспортного средства, размеры транспортного средства, распределение веса транспортного средства, площадь поверхности транспортного средства, высоту транспортного средства, тип трансмиссии (например, 2x или 4x), тип шин, тормозную систему, топливную систему, пробег, идентификационный номер транспортного средства и объем двигателя.
[0064] Реализация электронного устройства 210 особо не ограничивается, но в качестве примера электронное устройство 210 может быть реализовано как блок управления двигателем транспортного средства, центральный процессор транспортного средства, навигационное устройство транспортного средства (например, TomTom™, Garmin™), планшет и персональный компьютер, встроенный в SDC 220 и т.п. Таким образом, следует отметить, что электронное устройство 210 может или не может быть постоянно связано с SDC 220. Дополнительно или альтернативно электронное устройство 210 может быть реализовано в устройстве беспроводной связи, таком как мобильный телефон (например, смартфон или радиотелефон). В определенных вариантах осуществления электронное устройство 210 имеет дисплей 270.
[0065] Электронное устройство 210 может содержать некоторые или все компоненты компьютерной системы 100, изображенной на Фиг.1. В некоторых вариантах осуществления электронное устройство 210 является бортовым компьютерным устройством и содержит процессор 110, твердотельный накопитель 120 и память 130. Другими словами, электронное устройство 210 содержит аппаратное обеспечение и/или программное обеспечение и/или микропрограммное обеспечение, или их комбинацию для определения траектории SDC 220 на данном участке дороги с учетом препятствий на нем, как будет описано более подробно ниже.
Система датчиков
[0066] В неограничивающих вариантах осуществления настоящей технологии электронное устройство 210 содержит систему 230 датчиков или имеет доступ к ней. Согласно этим вариантам осуществления система 230 датчиков может содержать множество датчиков, допускающих различные реализации настоящей технологии. Примеры множества датчиков включают в себя, но не ограничиваются ими: камеры, датчики LIDAR, датчики RADAR и т.д. Система 230 датчиков функционально соединена с процессором 110 для передачи захваченной таким образом информации процессору 110 для ее обработки, как будет более подробно описано в данном документе ниже.
[0067] Система 230 датчиков может быть установлена на внутренней, верхней части лобового стекла SDC 220, но другие места находятся в пределах объема настоящего раскрытия, в том числе на заднем окне, боковых окнах, переднем капоте, крыше, передней решетке или переднем бампере SDC 220. В некоторых неограничивающих вариантах осуществления настоящей технологии система 230 датчиков может быть установлена в специальном корпусе (не показан), установленном на верхней части SDC 220.
[0068] Кроме того, пространственное размещение системы 230 датчиков может быть спроектировано с учетом ее конкретной технической конфигурации, конфигурации корпуса, погодных условий в районе, где будет использоваться SDC 220 (например, частый дождь, снег и другие элементы), или тому подобного.
[0069] В неограничивающих вариантах осуществления настоящей технологии система 230 датчиков может содержать датчик, выполненный с возможностью захвата изображения окружающей области 260. В этом отношении система 230 датчиков может быть камерой или их множеством (отдельно не изображены).
[0070] То, как реализована камера, особо не ограничивается. Например, в одном конкретном неограничивающем варианте осуществления настоящей технологии камера может быть реализована как монокамера с разрешением, достаточным для обнаружения объектов на заранее определенных расстояниях примерно до 30 м (хотя камеры с другими разрешениями и диапазонами в рамках настоящего раскрытия).
[0071] В некоторых вариантах осуществления настоящей технологии камера (или одна или несколько камер, составляющих реализацию системы 230 датчиков) выполнена с возможностью захвата предварительно определенной части окружающей области 260 вокруг SDC 220. В некоторых вариантах осуществления настоящей технологии камера выполнена с возможностью захвата изображения (или серии изображений), которые представляют приблизительно 90 градусов окружающей области 260 вокруг SDC 220, которые находятся вдоль траектории движения SDC 220.
[0072] В других вариантах осуществления настоящей технологии камера выполнена с возможностью захвата изображения (или серии изображений), которые представляют приблизительно 180 градусов окружающей области 260 вокруг SDC 220, которые находятся вдоль траектории движения SDC 220. Еще в дополнительных вариантах осуществления настоящей технологии камера выполнена с возможностью захвата изображения (или серии изображений), которые представляют приблизительно 360 градусов окружающей области 260 вокруг SDC 220, которые находятся вдоль траектории движения SDC 220 (другими словами, всю окружающую область вокруг SDC 220).
[0073] В конкретном неограничивающем примере камера может относиться к типу, доступному от FLIR Integrated Imaging Solutions Inc., 12051 Riverside Way, Ричмонд, Британская Колумбия, V6W 1K7, Канада. Следует четко понимать, что камера может быть реализована в любом другом подходящем оборудовании.
[0074] В неограничивающих вариантах осуществления настоящей технологии система 230 датчиков может дополнительно содержать лидарный прибор (отдельно не изображен). Лидар расшифровывается как оптическое обнаружение и определение дальности (LIDAR, Light Detection and Ranging). Ожидается, что специалист в данной области техники поймет функциональность лидарного прибора, но вкратце говоря, передатчик (не изображен) лидара отправляет лазерный импульс, а световые частицы (фотоны) рассеиваются обратно в приемник (не изображен) лидарного прибора. Фотоны, которые возвращаются к приемнику, собираются телескопом и подсчитываются в зависимости от времени. Используя скорость света (~ 3×108 м/с), процессор 110 может затем вычислить, как далеко прошли фотоны (за круговой путь). Фотоны могут рассеиваться от множества различных объектов, окружающих SDC 220, таких как другие частицы (аэрозоли или молекулы) в атмосфере, другие карты, неподвижные объекты или потенциальные препятствия перед SDC 220.
[0075] В конкретном неограничивающем примере лидарный прибор, входящий в систему 230 датчиков, может быть реализован как датчик на основе лидара, который может быть типа, доступного от Velodyne LiDAR, Inc., 5521 Hellyer Avenue, San Jose, CA 95138, Соединенные Штаты Америки. Следует четко понимать, что лидарный прибор может быть реализован в любом другом подходящем оборудовании.
[0076] В некоторых вариантах осуществления настоящей технологии лидарный прибор, входящий в систему 230 датчиков, может быть реализован как множество датчиков на основе лидара, например, три или любое другое подходящее количество.
[0077] В неограничивающих вариантах осуществления настоящей технологии система 230 датчиков может дополнительно содержать прибор радиообнаружения и определения дальности (RADAR) (отдельно не изображен). Вкратце, радар - это инструмент обнаружения, использующий радиоволны для определения дальности, угла и/или скорости объектов. Радарный прибор включает в себя передатчик, генерирующий электромагнитные волны, антенну, используемую для передачи и приема электромагнитных волн, приемник и процессор для определения свойств обнаруженных объектов.
[0078] В альтернативных вариантах осуществления настоящей технологии может быть отдельная антенна для приема волн и отдельная антенна для передачи волн. Процессор, используемый для определения свойств окружающих объектов, может быть процессором 110.
[0079] В некоторых вариантах осуществления настоящей технологии радарный прибор, используемый в системе 230 датчиков, может содержать датчики радара дальнего, среднего и ближнего действия. В качестве неограничивающего примера датчик радара дальнего действия может использоваться для адаптивного круиз-контроля, автоматического экстренного торможения и предупреждения о лобовом столкновении, в то время как датчики радара среднего и ближнего действия могут использоваться для помощи при парковке, предупреждения о перекрестном движении, помощи на перекрестке и обнаружения слепой стороны.
[0080] В конкретном неограничивающем примере радарный прибор, содержащийся в системе 230 датчиков, может принадлежать к типу, доступному от Robert Bosch GmbH, Robert-Bosch-Platz 1, 70839 Герлинген, Германия. Следует четко понимать, что радарный прибор может быть реализован в любом другом подходящем аппаратном обеспечении.
[0081] В некоторых неограничивающих вариантах осуществления настоящей технологии система 230 датчиков может использоваться процессором 110 для калибровки изображения. Например, используя изображение, захваченное камерой, и лидарное облако точек, захваченное лидарным прибором, процессор 110 выполнен с возможностью идентификации заданной области изображения, чтобы соответствовать заданной области лидарного облака точек, захваченного лидарным прибором. В других вариантах осуществления настоящей технологии система 230 датчиков откалибрована таким образом, что для изображения, захваченного камерой, лидарное облако точек, захваченное лидарным прибором, и радарные данные, захваченные радарным прибором, процессор 110 выполнен с возможностью идентифицировать данную область изображения, чтобы она соответствовала данной области лидарного облака точек и радарным данным.
[0082] В неограничивающих вариантах осуществления настоящей технологии SDC 220 дополнительно содержит или имеет доступ к другим датчикам (отдельно не изображены). Другие датчики включают в себя один или несколько из следующих элементов: инерциальный измерительный блок (IMU), прибор глобальной навигационной спутниковой системы (GNSS), радары путевой скорости, ультразвуковые сонарные датчики, датчики одометрии, включая акселерометры и гироскопы, механические датчики наклона, магнитный компас и другие датчики, позволяющие работать с SDC 220.
[0083] В качестве неограничивающего примера, IMU может быть прикреплен к SDC 220 и содержать три гироскопа и три акселерометра для предоставления данных о вращательном движении и линейном движении SDC 220, которые могут использоваться для вычисления движения и местоположения SDC 220.
Сеть связи
[0084] В некоторых вариантах осуществления настоящей технологии сеть 240 связи представляет собой Интернет. В альтернативных неограничивающих вариантах осуществления сеть 240 связи может быть реализована как любая подходящая локальная сеть (LAN), глобальная сеть (WAN), частная сеть связи и т.п. Следует четко понимать, что реализации сети 240 связи приведены только для целей иллюстрации. То, как реализована линия связи (отдельно не пронумерована) между электронным устройством 210 и сетью 240 связи, будет зависеть, в частности, от того, как реализовано электронное устройство 210. Просто в качестве примера, а не ограничения, в тех неограничивающих вариантах осуществления настоящей технологии, где электронное устройство 210 реализовано как устройство беспроводной связи, такое как смартфон или навигационное устройство, линия связи может быть реализована как линия беспроводной связи. Примеры линий беспроводной связи включают в себя, но не ограничиваются ими, линию связи в сети 3G, линию связи в сети 4G, линию связи в сети 5G и т.п. Сеть 240 связи также может использовать беспроводное соединение с сервером 235.
Сервер
[0085] В некоторых вариантах осуществления настоящей технологии сервер 235 реализован как обычный компьютерный сервер и может содержать некоторые или все компоненты компьютерной системы 100, показанной на Фиг.1. В одном неограничивающем примере сервер 235 реализован как сервер Dell™ PowerEdge™, работающий под управлением операционной системы Microsoft™ Windows Server™, но также может быть реализован в любом другом подходящем аппаратном обеспечении, программном обеспечении и/или микропрограммном обеспечении или их комбинации. В изображенных неограничивающих вариантах осуществления настоящей технологии сервер является одним сервером. В альтернативных неограничивающих вариантах осуществления настоящей технологии (не показаны) функциональные возможности сервера 235 могут быть распределены и могут быть реализованы посредством нескольких серверов.
[0086] В некоторых неограничивающих вариантах осуществления настоящей технологии процессор 110 электронного устройства 210 может поддерживать связь с сервером 235 для приема одного или нескольких обновлений. Обновлениями могут быть, помимо прочего, обновления программного обеспечения, обновления карт, обновления маршрутов, обновления погоды и т.п.
[0087] В некоторых вариантах осуществления настоящей технологии процессор 110 также может быть выполнен с возможностью передачи на сервер 235 определенных рабочих данных, таких как пройденные маршруты, данные трафика, данные производительности и т.п. Некоторые или все данные, передаваемые между SDC 220 и сервером 235, могут быть зашифрованы и/или анонимизированы.
Хранилище
[0088] На Фиг.2 также изображено хранилище 250, соединенное с возможностью осуществления связи с сервером 235. Однако в некоторых вариантах осуществления хранилище 250 может быть соединено с возможностью осуществления связи с электронным устройством 210 и/или может быть реализовано в электронном устройстве 210 и/или может быть соединено с возможностью осуществления связи с любым другим процессором сетевой компьютерной среды 200.
[0089] По меньшей мере в некоторых вариантах осуществления предполагается, что хранилище 250 может использоваться сервером 235, электронным устройством 210 и/или любым другим процессором сетевой компьютерной среды 200 в качестве устройства памяти для хранения информации. Хранилище 250 выполнено с возможностью хранения информации, извлеченной, определенной и/или сгенерированной процессором 110 сервера 235 и/или электронного устройства 210. Вообще говоря, хранилище 250 может принимать данные от процессора 110, которые были сгенерированы процессором 110 во время обработки, для их временного и/или постоянного хранения, и может предоставлять сохраненные данные процессору 110 для их использования. Предполагается, что хранилище 250 может быть разделено на несколько распределенных хранилищ, например, для обеспечения отказоустойчивой системы хранения, не выходя за рамки настоящей технологии.
[0090] Следует отметить, что по меньшей мере в некоторых вариантах осуществления настоящей технологии хранилище 250 может быть реализовано локально на электронном устройстве 210 и/или сервере 235 (например, в локальной памяти). Однако также предполагается, что хранилище 250 может быть реализовано удаленно от электронного устройства 210 и/или сервера 235 (например, в удаленной памяти).
Электронное устройство
[0091] Фиг.3 изображает принципиальную схему электронного устройства 210 для реализации различных неограничивающих вариантов осуществления настоящей технологии. Электронное устройство 210 может содержать один или несколько «модулей» для выполнения множества задач обработки данных. Некоторые из неограничивающих модулей могут включать в себя модуль 302 восприятия, модуль 304 прогнозирования траектории (для динамических объектов), модуль 306 прогнозирования местоположения (для динамических объектов), модуль 308 вычисления траектории (для SDC 220), модуль 310 планирования движения и базу 312 данных дорожных карт.
[0092] Предполагается, что «объект» может относиться к любому транспортному средству (например, другому SDC, другому управляемому человеком транспортному средству и т.п.), велосипеду, человеку на дороге, человеку вместе с домашним животным на дороге (в некоторых случаях человек, держащий домашнее животное, может упоминаться как один объект) или тому подобному. Кроме того, если объект находится в движении, он может называться динамическим объектом; другие могут называться статическими объектами.
[0093] Проиллюстрированные соединения между различными модулями на фиг. 3 соответствуют некоторым неограничивающим вариантам осуществления настоящей технологии. Различные модули могут связываться друг с другом независимо от показанных соединений. Следует отметить, что электронное устройство 210 может включать в себя дополнительные компоненты (например, те, что включены в компьютерную систему 100) и/или модули, но они исключены из Фиг.3 для простоты. Следует отметить, что каждый из неисчерпывающего списка модулей, перечисленных выше, может быть воплощен как одна или несколько компьютерно-реализуемых процедур, которые выполнены с возможностью выполнения обработки данных и/или генерации данных, как описано в данном документе. В качестве альтернативы данный модуль может быть физическим электронным устройством. Опционально, несколько модулей (или все модули) могут быть реализованы в одном электронном устройстве.
[0094] Электронное устройство 210 может быть выполнено с возможностью обработки информации, полученной системой 230 датчиков об окружении SDC 220. Как обсуждалось ранее, система 230 датчиков SDC 220 может включать в себя датчики (например, камеры, лидарные датчики, радарные датчики и т.д.), которые выполнены с возможностью получения информации об окружении в реальном времени. Информация в реальном времени может включать в себя информацию, относящуюся к области перед, сбоку и/или позади SDC 220. Система 230 датчиков может постоянно обнаруживать и отслеживать один или несколько объектов поблизости от SDC 220, чтобы определять параметры, касающиеся ситуаций вождения объектов. Некоторые из неограничивающих параметров включают в себя, например, скорость, разницу в местоположении в зависимости от времени и т.п.
[0095] В некоторых неограничивающих вариантах осуществления система 230 датчиков может предоставлять в реальном времени информацию об окружении SDC 220 в модуль 302 восприятия. Модуль 302 восприятия может быть выполнен с возможностью выполнения по меньшей мере некоторой обработки данных в отношении информации в реальном времени и может предоставлять обработанные данные другим модулям электронного устройства 210. Модуль 302 восприятия может выполнять по меньшей мере некоторую обработку данных в отношении информации в реальном времени, чтобы определять, например, количество объектов, находящихся в настоящее время в движении рядом с SDC 220, перемещается ли другой объект относительно SDC 220 в той же или на соседней полосе движения, перемещается ли другой объект относительно SDC 220 в том же или противоположном направлении, какая скорость или разница в скорости по отношению к SDC 220 у этого объекта, информация о рулевом управлении объекта и т.п. Предполагается, что приведенный выше список не является исчерпывающим, и модуль 302 восприятия может определять, извлекать или выводить любую подходящую информацию об окружении SDC 220 путем обработки информации в реальном времени.
[0096] В одном неограничивающем варианте осуществления модуль 302 восприятия может предоставлять обработанные данные в модуль 304 прогнозирования траектории. Модуль 304 прогнозирования траектории может быть выполнен с возможностью прогнозирования множества траекторий, связанных с объектами поблизости от SDC 220. Каждая из прогнозируемых траекторий (здесь взаимозаменяемо именуемая множеством прогнозируемых траекторий) может включать в себя точки потенциального будущего местоположения объектов на участке дорожной карты как функцию времени. Модуль 304 прогнозирования траектории может прогнозировать множество траекторий, связанных по меньшей мере с одним объектом, на основе данных о движении, которые указывают на кинематические характеристики (например, скорость, ускорение, направление, угол и т.п.) объектов, и на основе дорожной карты, которая указывает на различные ограничения участка дороги, например, правила дорожного движения и форму дороги.
[0097] Однако, по меньшей мере в некоторых вариантах осуществления разработчики настоящей технологии разработали способы и устройства, которые обеспечивают решения в ситуациях, когда объекты могут присутствовать поблизости от SDC 220 и могут представлять риск столкновения с SDC 220. В качестве примера, если участок дороги поблизости от SDC 220 занят грузовиком большого размера, а участок дороги впереди грузовика изогнут. Существует высокая вероятность того, что грузовик может занять по меньшей мере часть полосы движения, смежной к полосе движения, по которой грузовик движется в данный момент. С этой целью в различных неограничивающих вариантах осуществления настоящих технологий множество траекторий, связанных с объектами, может быть спрогнозировано без учета полос движения на дороге. При этом SDC 220 может иметь некоторую дополнительную степень свободы для маневра и может позволять изменять текущую траекторию SDC 220 и/или управлять работой SDC 220 таким образом, чтобы в вышеупомянутых ситуациях риск столкновения с объектами был уменьшен.
[0098] Следует отметить, что прогнозируемые траектории могут быть связаны с «уровнем точности», поскольку прогнозируемые траектории имеют вероятностный характер из-за того, что прогноз делается на основе текущих данных о движении объектов. Тем не менее, прогнозируемые траектории могут итеративно обновляться на основе самой последней информации об объектах и участке дороги, собранной системой 230 датчиков.
[0099] В некоторых неограничивающих вариантах осуществления модуль 304 прогнозирования траектории может предоставлять множество прогнозируемых траекторий, связанных с объектами, в модуль 306 прогнозирования местоположения. Модуль 306 прогнозирования местоположения может быть выполнен с возможностью прогнозирования местоположения объекта в будущем моменте времени для данной одной из множества прогнозируемых траекторий. Подробности работы модуля 306 прогнозирования местоположения будут обсуждаться позже.
[0100] На основе прогнозируемого местоположения объекта операцией/маневрированием SDC 220 можно управлять путем запуска действий торможения, действий рулевого управления и/или действий ускорения. Эти действия могут быть инициированы модулем 310 планирования движения электронного устройства 210.
[0101] Теперь будет обсуждаться, как электронное устройство 210 может быть выполнено с возможностью прогнозирования местоположения объекта в пределах множества полос движения в будущий момент времени.
Способ работы с электронным устройством
[102] В различных вариантах осуществления настоящей технологии предоставляется способ 400 прогнозирования местоположения по меньшей мере одного объекта в будущий момент времени. Способ 400 может выполняться во время движения SDC 220 по участку дороги. Различные этапы способа 400 теперь будут описаны более подробно.
ЭТАП 402: прием участка дорожной карты
[0103] Способ 400 начинается на этапе 402, где электронное устройство 210 выполнено с возможностью приема участка дорожной карты, соответствующего окружению SDC 220 и по меньшей мере одному объекту. Участок дорожной карты включает в себя информацию о множестве полос движения и правилах дорожного движения, связанных с этим участком дорожной карты.
[0104] В некоторых неограничивающих вариантах осуществления настоящей технологии электронное устройство 210 может обмениваться данными с базой 312 данных дорожных карт (как изображено на фиг.3) для приема участка дорожной карты и связанной информации. В некоторых вариантах осуществления база 312 данных дорожных карт может быть частью электронного устройства 210. Хотя в других вариантах осуществления база 312 данных дорожных карт может располагаться вне электронного устройства 210. В качестве примера база 312 данных дорожных карт может быть расположена в хранилище 250, и электронное устройство 210 может связываться с базой 312 данных дорожных карт через сервер 235, используя сеть 240 связи. Предполагается, что расположение базы 312 данных дорожных карт не должно ограничивать объем настоящей технологии.
[0105] В различных неограничивающих вариантах осуществления база 312 данных дорожных карт может включать в себя дорожную карту и определенную связанную информацию. Такая информация может быть связана с различными участками дорожной карты. Для данного участка дорожной карты некоторые примеры связанной информации могут включать в себя количество полос движения на данном участке дорожной карты, геометрические свойства полос движения (например, ширина каждой полосы движения, кривизна каждой полосы движения или тому подобное), количество выездов на участке дорожной карты, отметка на участке дорожной карты, указывающая одно или более из следующего: указание поворота налево или направо, указание выезда, перегородка между дорогой. Предполагается, что приведенный выше список не является исчерпывающим, и информация, связанная с данным участком дорожной карты, может включать в себя любую другую подходящую информацию, такую как дорожные знаки и т.д. Предполагается, что по меньшей мере в некоторых неограничивающих вариантах осуществления настоящей технологии связанная информация может храниться в форме дорожной схемы и/или в форме дорожной карты высокой четкости (HD).
[0106] Кроме того, база 312 данных дорожных карт может включать в себя указание применимых правил дорожного движения. Такие правила дорожного движения могут быть связаны с различными участками дорожной карты. Для данного участка дорожной карты некоторые примеры правил дорожного движения могут включать, является ли данный участок карты дорогой с односторонним или двусторонним движением, если данный участок карты является дорогой с двусторонним движением, сколько полос движения предназначены для одностороннего движения, является ли полоса движения велосипедной и/или пешеходной полосой, так что другие транспортные средства могут быть запрещены, предназначена ли полоса движения для определенного типа транспортного средства или тому подобное. Предполагается, что приведенный выше список не является исчерпывающим, и правила дорожного движения, связанные с данным участком дорожной карты, могут включать в себя любые другие подходящие правила. Предполагается, что по меньшей мере в некоторых неограничивающих вариантах осуществления настоящей технологии информация о правилах дорожного движения может храниться в форме дорожной схемы и/или в форме дорожной карты высокого разрешения.
[0107] В некоторых неограничивающих вариантах осуществления, чтобы получить фрагмент дорожной карты, электронное устройство 210 может предоставить текущие координаты GPS SDC 220 в базу 312 данных дорожной карты. Основываясь на текущих координатах GPS, связанных с SDC 220, база 312 данных дорожной карты может выбрать соответствующий участок дорожной карты и предоставить его электронному устройству 210. В некоторых неограничивающих вариантах осуществления участок дорожной карты предоставляется электронному устройству 210 как карта HD.
[0108] В некоторых неограничивающих вариантах осуществления модуль 302 восприятия, связанный с электронным устройством 210, может связываться с базой 312 данных дорожной карты, чтобы получить участок дорожной карты.
ЭТАП 404: генерирование множества прогнозируемых траекторий, связанных по меньшей мере с одним объектом.
[0109] Возвращаясь к описанию фиг. 4, способ 400 переходит к этапу 404, на котором электронное устройство 210 генерирует множество прогнозируемых траекторий, связанных по меньшей мере с одним объектом. Как обсуждалось ранее, модуль 304 прогнозирования траектории может быть выполнен с возможностью генерирования множества прогнозируемых траекторий.
[0110] Со ссылкой на фиг. 5 изображен участок дорожной карты 500 в репрезентативном сценарии в соответствии с различными неограничивающими вариантами осуществления настоящей технологии. Изображен участок дорожной карты 500, имеющий множество полос 502, 504, 506, 508 и 510 движения, разделенных сплошными и пунктирными линиями. Сплошные линии могут указывать на запрещенную смену полосы движения, а пунктирные линии могут указывать на разрешенную смену полосы движения. Также изображено представление 514 SDC 220, движущегося по полосе 504 движения, которая будет называться текущей полосой движения SDC 220.
[0111] Участок дорожной карты 500 был проиллюстрирован как дорога с односторонним движением, по которой объекты и SDC 220 могут двигаться в одном направлении. Однако в различных неограничивающих вариантах осуществления настоящей технологии участок дорожной карты 500 может быть полосой с двусторонним движением, в которой по меньшей мере некоторые объекты могут двигаться в противоположном направлении. Различные сценарии участка дорожной карты 500, включая различные типы полос движения и направления движения объектов и SDC 220, не должны ограничивать объем настоящей технологии.
[0112] Система 230 датчиков может быть выполнена с возможностью получения информации об окружении SDC 220. Модуль 302 восприятия может обрабатывать полученную информацию для идентификации различных объектов поблизости от SDC 220. В качестве примера, на участке дорожной карты 500, объекты, идентифицированные модулем 302 восприятия, могут быть представлены как объект 512, связанный с полосой 502 движения, объект 516, связанный с полосой 506 движения, и объект 518, связанный с полосой 508 движения.
[0113] Наряду с идентификацией объектов 512, 516, 518 модуль 302 восприятия также может быть выполнен с возможностью определения связанных данных движения. Данные движения, связанные с объектами 512, 516, 518, изображаются как данные 520, 522 и 524 движения соответственно. Данные 520, 522 и 524 движения могут быть указанием кинематических характеристик (например, скорости, ускорения, направления, угла, местоположения, положения и т.п.) объектов 512, 516 и 518 соответственно.
[0114] На основе данных 520, 522 и 524 движения модуль 304 прогнозирования траектории может быть выполнен с возможностью прогнозирования множества траекторий для каждого из объектов 512, 516 и 518. Каждая из прогнозируемых траекторий может включать в себя точки потенциального будущего местоположения соответствующих объектов 512, 516 и 518 на участке дорожной карты 500. Для этого модуль 304 прогнозирования траектории может выполнять алгоритм машинного обучения (MLA), который обучен прогнозировать траектории различных объектов на основе их текущего состояния, их кинематических характеристик, информации о дороге и т.п.
[0115] Чтобы иметь некоторую дополнительную степень свободы и учитывать различные неизбежные сценарии на участке дорожной карты 500, модуль 304 прогнозирования траектории может быть выполнен с возможностью прогнозирования множества траекторий для каждого из объектов 512, 516 и 518 на основе соответствующих данных 520, 522, 524 движения и без учета границ множества полос 502, 504, 506 и 508 движения. Другими словами, модуль 304 прогнозирования траектории может быть выполнен с возможностью прогнозирования множества траекторий для каждого из объектов 512, 516 и 518 на основе соответствующих данных 520, 522, 524 движения без учета того, какую из полос движения (множество полос 502, 504, 506 и 508 движения) прогнозируемая траектория будет пересекать или, другими словами, с какой из полос движения связана прогнозируемая траектория.
[0116] Различные неизбежные сценарии на участке дорожной карты 500 могут включать в себя следующее: закрытие дороги из-за ремонта/строительства дороги, аварии и т.п., полоса движения на участке дорожной карты 500 занята большим транспортным средством (например, грузовик), и полоса движения впереди грузовика является изогнутой, так что для того, чтобы следовать кривизне полосы движения, грузовик может занимать часть полосы движения, смежную к полосе движения, в которой находится грузовик, велосипед внезапно занял часть полосы движения, которая в противном случае запрещена для велосипедов, затор на дорогах, пешеход внезапно занял часть полосы движения, которая в противном случае запрещена для пешеходов, или любой другой неограничивающий неизбежный сценарий на участке дорожной карты 500.
[0117] При этом для каждого из объектов 512, 516 и 518 модуль 304 прогнозирования траектории может прогнозировать множество прогнозируемых траекторий, чтобы охватить различные сценарии, в которых объекты 512, 516 и 518 перемещаются по участку дорожной карты 500. Несмотря на то, что модуль 304 прогнозирования траектории может прогнозировать множество прогнозируемых траекторий без учета множества полос 502, 504, 506 и 508 движения, все же при прогнозировании траекторий модуль 304 прогнозирования траектории может учитывать различные выезды и/или повороты на участке дорожной карты 500. В некоторых примерах, помимо данных 520, 522 и 524 движения и различных выездов и/или поворотов, модуль 304 прогнозирования траектории может также учитывать различные указания (например, указание поворота налево или поворота направо) от объектов 512, 516 и 518. В еще одном примере модуль 304 прогнозирования траектории может также рассматривать различные неизбежные сценарии в реальном времени (как обсуждалось выше) на участке дорожной карты 500 для прогнозирования множества траекторий.
[0118] В качестве примера для объекта 512 модуль 304 прогнозирования траектории мог спрогнозировать соответствующие прогнозируемые траектории 526 и 528. Прогнозируемая траектория 526 может быть связана со сценарием, в котором на основе данных 520 движения модуль 304 прогнозирования траектории определяет, что объект 512 может намереваться изменить полосу движения с полосы 502 движения на полосу 510 движения, чтобы свернуть на выезд. Точно так же прогнозируемая траектория 528 может быть связана со сценарием, в котором на основе данных 520 движения модуль 304 прогнозирования траектории определяет, что объект 512 может продолжать движение по полосе 502 движения.
[0119] В другом примере для объекта 516 модуль 304 прогнозирования траектории может спрогнозировать связанные траектории 532 и 534. Прогнозируемая траектория 532 может быть связана со сценарием, в котором на основе данных 522 движения модуль 304 прогнозирования траектории определяет, что объект 516 может продолжать движение по полосе 506 движения. Точно так же прогнозируемая траектория 534 может быть связана со сценарием, когда полоса 506 движения перед объектом 516 может быть закрыта из-за строительства или аварии. С этой целью на основе данных 522 движения модуль 304 прогнозирования траектории определяет, что объект 516 может намереваться изменить полосу движения с полосы 506 движения на полосу 504 движения, даже если такой маневр не разрешен или временно разрешен из-за строительства или аварии. Подобным образом прогнозируемые траектории 536 и 538 могут быть связаны с объектом 518. Прогнозируемая траектория 538 может представлять сценарий, в котором прогнозируется, что объект 518 поворачивает налево.
[0120] В некоторых неограничивающих вариантах осуществления для прогнозирования траектории (например, прогнозируемой траектории 526) модуль 304 прогнозирования траектории может определять горизонт расстояния (или «горизонт прогнозирования»). Например, горизонт расстояния может составлять 200 м, что означает, что первые 200 м от объекта (например, объекта 512) могут быть приняты во внимание для прогнозирования траектории (например, прогнозируемой траектории 526). Кроме того, горизонт расстояния может включать в себя «подэтап». Например, горизонт расстояния может дополнительно указывать на подмножество 0,25 м - это означает, что первые 200 м опорного пути могут быть разделены на более мелкие участки посредством точек потенциального будущего местоположения, разделенных расстоянием 0,25 м. В некоторых неограничивающих вариантах осуществления настоящей технологии горизонт прогнозирования может быть реализован как горизонт «пути полосы движения».
[0121] В некоторых неограничивающих вариантах осуществления, в качестве альтернативы или в дополнение к горизонту расстояния, модуль 304 прогнозирования траектории может определять горизонт временной шкалы. Например, горизонт временной шкалы может составлять 20 секунд, что означает, что следующие 20 секунд движения объекта (например, объекта 512) могут быть приняты во внимание для прогнозирования траектории (например, прогнозируемой траектории 526). Также горизонт временной шкалы может включать в себя «подэтап». Например, горизонт временной шкалы может дополнительно указывать на подмножество 0,1 с, что означает, что следующие 20 с движения объекта (например, объекта 512) должны быть разделены на более мелкие участки посредством будущих моментов времени, разделенных 0,1 с.
[0122] Предполагается, что горизонт расстояния и горизонт временной шкалы, обсужденные выше, являются просто репрезентативными примерами, и в различных сценариях горизонты расстояний, горизонты временной шкалы, включая подэтапы, могут зависеть от различных факторов, например скорости, с которой SDC 220 и/или объекты (например, объекты 512, 516 и 518) движутся, движения на участке дорожной карты 500, беспрепятственной видимости участка дорожной карты 500 и т.п.
[0123] В качестве примера, если участок дорожной карты 500 связан с «шоссе», горизонт расстояния и связанные подэтапы могут быть больше по сравнению со сценарием, где участок дорожной карты 500 связан с «местная улица», что касается шоссе, в большинстве случаев дорога может быть беспрепятственной на большем расстоянии. Точно так же, если участок дорожной карты 500 связан с «шоссе», горизонт временной шкалы и связанные подэтапы могут быть меньше по сравнению со сценарием, где участок дорожной карты 500 связан с «местная улица», что касается местных улиц, наиболее вероятно, что объекты (например, объекты 512, 516, 518) могут двигаться с меньшей скоростью по сравнению со скоростью объектов (например, объектов 512, 516, 518) на шоссе.
[0124] Как обсуждалось ранее, каждая из множества прогнозируемых траекторий (например, прогнозируемая траектория 526) может включать в себя точки потенциального будущего местоположения. В одном примере прогнозируемая траектория 526 может включать в себя точки 526-1, 526-2, 526-3 и 526-4 потенциального будущего местоположения, представляющие возможные будущие местоположения объекта 512 в различные будущие моменты времени. Точки 526-1, 526-2, 526-3 и 526-4 потенциального будущего местоположения могут представлять возможное будущее местоположение объекта 512 в момент времени t1, t2, t3 и t4 соответственно. Подобным образом каждая из множества прогнозируемых траекторий (например, 526) может включать в себя точки потенциального будущего местоположения, где первая точка потенциального будущего местоположения (например, 526-1), связанная с данной прогнозируемой траекторией (например, 526), может быть ближе к объекту (например, 512), а последняя точка потенциального будущего местоположения (например, 526-4), связанная с данной траекторией (например, 526), может быть дальше от объекта (например, 512).
[0125] Следует отметить и, как упоминалось выше, в некоторых неограничивающих вариантах осуществления модуль 304 прогнозирования траектории может использовать алгоритм машинного обучения (MLA) для прогнозирования множества траекторий. Входные данные MLA могут включать в себя данные движения (например, данные 520, 522, 524 движения), а выходные данные MLA могут быть множеством прогнозируемых траекторий (например, прогнозируемых траекторий 526, 528).
ЭТАП 406: наложение точек потенциального будущего местоположения, связанных с данной одной из множества прогнозируемых траекторий, на участок дорожной карты.
[0126] Продолжая ссылаться на фиг.4, способ 400 переходит к этапу 406, где для данной одной из множества прогнозируемых траекторий (например, прогнозируемой траектории 526) электронное устройство 210 накладывает точки потенциального будущего местоположения (например, точки 526-1, 526-2, 526-3 и 526-4 потенциального будущего местоположения) на участок дорожной карты 500 в соответствии с информацией о множестве полос движения (например, множестве полос 502, 504, 506 и 508 движения).
[0127] Как отмечалось выше, информация о множестве полос движения (например, множестве полос 502, 504, 506 и 508 движения) может включать в себя геометрические свойства, такие как ширина каждой полосы движения, кривизна каждой полосы движения и т.п., разметка на участке дорожной карты, обозначающая, указание выезда, разделение полос движения, представленное сплошными и пунктирными линиями. Кроме того, в некоторых неограничивающих вариантах осуществления участок дорожной карты 500 может быть представлен как карты HD или схемы.
[0128] На основе информации о множестве полос движения (например, о множестве полос 502, 504, 506 и 508 движения) электронное устройство 210 (и, более конкретно, модуль 306 прогнозирования местоположения) может быть выполнен с возможностью наложения точки потенциального будущего местоположения (например, точки 526-1, 526-2, 526-3 и 526-4 потенциального будущего местоположения), связанной с заданной траекторией (например, прогнозируемой траекторией 526) на участок дорожной карты 500. Ссылаясь на фиг. 3 и 5, в некоторых неограничивающих вариантах осуществления модуль 306 прогнозирования местоположения может получить доступ к участку дорожной карты 500 из базы 312 данных дорожной карты. Кроме того, модуль 306 прогнозирования местоположения может связывать точки потенциального будущего местоположения (например, точки 526-1, 526-2, 526-3 и 526-4 потенциального будущего местоположения) на множестве полос движения (например, множестве полос 502, 504, 506 и 508 движения), определяя, на какой полосе движения находится данная точка будущего местоположения. В качестве примера модуль 306 прогнозирования местоположения может накладывать точки 526-1 и 526-2 потенциального будущего местоположения на полосу 502 движения и может накладывать точки 526-3 и 526-4 потенциального будущего местоположения на полосе 510 движения.
[0129] Аналогичным образом модуль 306 прогнозирования местоположения может накладывать точки потенциального будущего местоположения, связанные с прогнозируемой траекторией 528, на полосу 502 движения, накладывать точки потенциального будущего местоположения, связанные с прогнозируемой траекторией 532, на полосу 506 движения, накладывать первые две точки потенциального будущего местоположения, связанные с прогнозируемой траекторией 534, на полосу 506 движения, и оставшиеся две точки потенциального будущего расположения, связанные с прогнозируемой траекторией 534, на полосу 504 движения. Кроме того, модуль 306 прогнозирования местоположения может накладывать точки потенциального будущего местоположения, связанные с прогнозируемой траекторией 536, на полосу 508 дороги. Что касается прогнозируемой траектории 538, модуль 306 прогнозирования местоположения может накладывать (или, в некотором смысле, проецировать) точки 538-1 и 538-2 потенциального будущего местоположения на полосу 508 дороги и точки 538-3 потенциального будущего местоположения на полосу 504 движения.
[0130] В некоторых неограничивающих вариантах осуществления настоящей технологии перед наложением заданной прогнозируемой траектории (например, прогнозируемой траектории 538) на полосы 504, 506 и 508 движения модуль 306 прогнозирования местоположения может быть выполнен с возможностью анализа связи между данной прогнозируемой траекторией (например, прогнозируемая траектория 538) и полосами 504, 506 и 508 движения. С этой целью модуль 306 прогнозирования местоположения может генерировать несколько гипотез для определения связи (например, отношения) между точками потенциального будущего местоположения данной прогнозируемой траектории (например, прогнозируемой траектории 538) и одной или несколькими полосами 504, 506, 508 движения в данный момент времени.
[0131] Ссылаясь на фиг. 6, на которой изображена часть 600 участка дорожной карты 500 с полосами 504, 506 и 508 движения и объектом 518 в соответствии с различными неограничивающими вариантами осуществления настоящей технологии. Для простоты иллюстрации другие объекты 512 и 516, а также SDC 220 не показаны на фиг. 6. В одном примере предполагается, что объект 518 первоначально двигался по прогнозируемой траектории 536, однако из-за неизбежных сценариев (как обсуждалось ранее) объект 518 может намереваться отклониться от своей текущей траектории (например, прогнозируемая траектория 536). С этой целью в некоторых вариантах осуществления модуль 306 прогнозирования местоположения может прогнозировать различные точки потенциального будущего местоположения, например, точки 538-1, 538-2, 538-3, 538-4 и 538-5 потенциального будущего местоположения вместе со связанными гипотезами.
[0132] Связанные гипотезы могут представлять связь (например, взаимосвязь) точек потенциального будущего местоположения (например, точки 538-1, 538-2, 538-3, 538-4 и 538-5 потенциального будущего местоположения) с полосами 504, 506 и 508 движения. В качестве примера для точки 538-2 потенциального будущего местоположения модуль 306 прогнозирования местоположения может генерировать первую гипотезу о том, что следующая потенциальная точка будущего местоположения (например, точка 538-3 потенциального будущего местоположения) может попасть на ту же полосу 506 движения, вторую гипотезу, что следующая точка потенциального будущего местоположения (например, точка 538-4 потенциального будущего местоположения) может попасть на соседнюю полосу движения (например, полосу 508 движения), и третью гипотезу, что следующая точка потенциального будущего местоположения (например, точка 538-4 потенциального будущего местоположения) может попасть на соседнюю полосу движения (например, полосу 504 движения).
[0133] Следует отметить, что в различных неограничивающих вариантах осуществления электронное устройство 210 может сохранять заданную одну из множества прогнозируемых траекторий (например, прогнозируемую траекторию 538), связанные точки потенциального будущего местоположения (например, точки 538-1, 538-2, 538-3, 538-4 и 538-5 потенциального будущего местоположения) и различные гипотезы, а также наложение точек потенциального будущего местоположения на участок дорожной карты 500 в памяти (например, в памяти 130).
ЭТАП 408: вычисление оценки для каждой из точек потенциального будущего местоположения
[0134] Возвращаясь к Фиг.4, способ 400 переходит к этапу 408, на котором электронное устройство 210 вычисляет оценки для каждой из точек потенциального будущего местоположения (например, точек 526-1, 526-2, 526-3 и 526-4 потенциального будущего местоположения), связанных с данной одной из множества прогнозируемых траекторий (например, прогнозируемой траекторией 526), оценки представляют связь точки местоположения с множеством полос движения в будущий момент времени.
[0135] Ссылаясь на Фиг.3 и 5, в некоторых неограничивающих вариантах осуществления настоящей технологии электронное устройство 210 (модуль 306 прогнозирования местоположения) может анализировать каждую из точек потенциального будущего местоположения (например, точки 526-1, 526-2, 526-3 и 526-4 потенциального будущего местоположения), связанных с данной одной из множества прогнозируемых траекторий (например, прогнозируемой траекторией 526), чтобы определить, насколько рискованной может быть точка потенциального будущего местоположения по отношению к SDC 220.
[0136] С этой целью в некоторых неограничивающих вариантах осуществления до точек потенциального будущего местоположения модуль 306 прогнозирования местоположения может определять полосу дороги, по которой SDC 220 движется в настоящее время. В определенном варианте осуществления модуль 306 прогнозирования местоположения может полагаться на технологию определения местоположения (например, GPS) для определения текущего местоположения SDC 220. В качестве альтернативы или в дополнение к модулю 306 прогнозирования местоположения в некоторых неограничивающих вариантах осуществления модуль 306 прогнозирования местоположения может полагаться на выходные данные по меньшей мере некоторых датчиков в системе 230 датчиков (например, камер), чтобы определить, по какой полосе движения, связанной с участком дорожной карты 500, SDC 220 движется в настоящее время.
[0137] После того, как полоса движения, по которой движется SDC 220 (например, полоса 504 движения на Фиг.5), определена, модуль 306 прогнозирования местоположения может затем проанализировать каждую из множества прогнозируемых траекторий (например, прогнозируемые траектории 526, 528, 532...), связанных с объектами (например, объектами 512, 516 и 518).
[0138] В некоторых из неограничивающих вариантов осуществления модуль 306 прогнозирования местоположения может выбирать одну из множества прогнозируемых траекторий (например, прогнозируемых траекторий 526, 528, 532...) и связанных гипотез. В качестве примера модуль 306 прогнозирования местоположения выбирает прогнозируемую траекторию 538. Модуль 306 прогнозирования местоположения может затем назначать заранее определенные оценки ассоциированным точкам 538-1, 538-2, 538-3, 538-4 и 538-5 потенциального будущего местоположения на основе различных гипотез.
[0139] Назначение заранее определенной оценки текущим точкам потенциального будущего местоположения (например, точке 538-2 потенциального будущего местоположения) может быть основано на анализе различных гипотез связи следующей точки потенциального будущего местоположения (например, 538-3, 538-4 или 538-5 точек потенциального будущего местоположения) и предыдущей точки потенциального будущего местоположения (например, потенциальное будущее) с полосами движения (например, полосами 504, 506 и 508 движения).
[0140] В некоторых неограничивающих вариантах осуществления модуль 306 прогнозирования местоположения может назначить заранее определенную оценку первой точке потенциального будущего местоположения (например, точке 538-1 потенциального будущего местоположения) на основе связи следующей точки потенциального будущего местоположения (например, точки 538-2 потенциального будущего местоположения) и объекта (например, объекта 518) с полосами движения (например, полосами 506 и 508 движения). В соответствии с одной гипотезой, если первая точка потенциального будущего местоположения (например, точка 538-1 потенциального будущего местоположения) расположена на той же полосе движения (например, полосе 508 движения), в которой объект (например, объект 516) в настоящее время движется, и следующая точка потенциального будущего местоположения (например, точка 538-2 потенциального будущего местоположения) расположена на той же полосе движения (например, полосе 508 движения) или на соседней полосе движения (например, полосе 506 движения), модуль 306 прогнозирования местоположения может назначить первую заранее заданную оценку первой точке потенциального будущего местоположения (например, точке 538-1 потенциального будущего местоположения).
[0141] Первая заранее заданная оценка может указывать на маловероятную быструю смену полосы движения объектом (например, объект 518) между последовательными периодами времени с малым приращением изменения времени между ними.
[0142] Аналогичным образом модуль 306 прогнозирования местоположения может назначить заранее определенные оценки точке потенциального будущего местоположения (например, точке 538-2 потенциального будущего местоположения) на основе связи с его предыдущей точкой потенциального будущего местоположения (например, точкой 538-1 потенциального будущего местоположения) и различных гипотез связи различных точек потенциального будущего местоположения (например, точки 538-3, 538-4, 538-5 потенциального будущего местоположения) с полосами движения (например, полосами 504, 506 и 508 движения).
[0143] В соответствии с другой гипотезой, если следующая точка потенциального будущего местоположения (например, точка 538-3 потенциального будущего местоположения) расположена на той же полосе движения (например, полосе 506 движения), в которой расположена текущая точка потенциального будущего местоположения (например, точка 538-2 потенциального будущего местоположения), а предыдущая точка потенциального будущего местоположения (например, точка 538-1 потенциального будущего местоположения) расположена на той же полосе движения (например, полосе 506 движения) или на соседней полосе движения (например, полосе 508 движения), модуль 306 прогнозирования местоположения может назначить первую заранее заданную оценку текущей точке потенциального будущего местоположения (например, точке 538-2 потенциального будущего местоположения). Впоследствии это снова будет указывать на маловероятную быструю смену объектом (например, объект 518) полосы движения между последовательными периодами времени с малым приращением изменения времени между ними.
[0144] Однако в соответствии с другой гипотезой, если следующая точка потенциального будущего местоположения (например, точка 538-4 или 538-5 потенциального будущего местоположения) расположена на соседней полосе движения (например, полосе 504 или 506 движения) и предыдущая точка потенциального будущего местоположения (например, точка 538-1 потенциального будущего местоположения) также расположена на соседней полосе движения (например, полосе 508 движения), модуль 306 прогнозирования местоположения может назначить вторую заранее заданную оценку текущей точке потенциального будущего местоположения (например, точке 538-2 потенциального будущего местоположения).
[0145] Вторая заранее заданная оценка может представлять маловероятное зигзагообразное поведение объекта 518 между последовательными периодами времени с малым приращением изменения времени между ними (и поэтому такая гипотеза с меньшей вероятностью будет верной).
[0146] С этой целью в некоторых неограничивающих вариантах осуществления первая заранее заданная оценка может иметь более высокое значение, чем вторая заранее заданная оценка. В другом примере первая заранее определенная оценка может быть положительным значением, а вторая заранее определенная величина может быть отрицательным значением.
[0147] Кроме того, для каждой точки потенциального будущего местоположения (например, точек 538-1, 538-2, 538-3, 538-4 и 538-5 потенциального будущего местоположения), связанных с данной прогнозируемой траекторией (например, прогнозируемой траекторией 538), модуль 306 прогнозирования местоположения может быть выполнен с возможностью назначать первую заранее заданную оценку в дополнение или в качестве альтернативы второй заранее заданной оценке на основе различных связанных гипотез. В качестве примера точкам 538-2 потенциального будущего местоположения может быть присвоено три заранее заданных оценки на основе трех различных гипотез. В первой гипотезе, по меньшей мере, следующая точка 538-3 потенциального будущего местоположения попадает на ту же полосу 506 движения, что и у точек 538-2 потенциального будущего местоположения, таким образом, назначенная заранее заданная оценка является первой заранее заданной оценкой. Для второй и третьей гипотез следующие точки 538-4 и 534-5 потенциального будущего местоположения попадают на разные полосы 504 и 508 движения соответственно, а предыдущая точка 538-1 потенциального будущего местоположения находится на другой полосе 508 движения. С этой целью для второй и третьей гипотез точкам 538-2 потенциального будущего местоположения может быть назначена вторая заранее заданная оценка.
[0148] Предполагается, что пример, изображенный на фиг.6, предназначен только для целей представления, и любой подходящий способ оценки для оценки различных гипотез, приводящий к маловероятному зигзагообразному поведению объекта 518 между последовательными периодами времени с малым шагом приращения изменения времени между ними, может использоваться без отступления от настоящих способов.
[0149] В различных неограничивающих вариантах осуществления, в качестве альтернативы или в дополнение к описанной выше методике для вычисления оценок для каждой из точек потенциального будущего местоположения (например, точек 538-1, 538-2, 538-3, 538-4 и 538-5 потенциального будущего местоположения), связанных с данной одной из множества прогнозируемых траекторий (например, прогнозируемой траекторией 538), электронное устройство 210 может полагаться на MLA, в котором точки потенциального будущего местоположения (например, точки 538-1, 538-2, 538-3, 538-4 и 538-5 потенциального будущего местоположения) могут быть предоставлены в качестве входных данных для MLA, а выходные данные MLA могут содержать оценки для каждой из точек потенциального будущего местоположения (например, точек 538-1, 538-2, 538-3, 538-4 и 538-5 потенциального будущего местоположения).
[0150] Предполагается, что модуль 306 прогнозирования местоположения может быть выполнен с возможностью хранения оценок, присвоенных точкам потенциального будущего местоположения, связанным с множеством прогнозируемых траекторий, в памяти (например, памяти 130) таким образом, чтобы оценки, связанные с каждой из множества прогнозируемых траекторий, могли быть доступны для дальнейшей обработки.
ЭТАП 410: вычисление совокупной оценки из оценок, соответствующих точкам потенциального будущего местоположения.
[0151] Возвращаясь к Фиг.4, способ 400 переходит к этапу 410, на котором электронное устройство 210 вычисляет совокупную оценку из оценок, соответствующих точкам потенциального будущего местоположения (например, точкам 538-1, 538-2, 538- 3, 538-4 и 538-5 потенциального будущего местоположения), связанных с данной одной из множества прогнозируемых траекторий (например, прогнозируемой траекторией 538), для различных гипотез.
[0152] Ссылаясь на Фиг.3 и 5, в некоторых неограничивающих вариантах осуществления настоящей технологии электронное устройство 210 (в частности, модуль 306 прогнозирования местоположения) может агрегировать оценки, назначенные каждой из точек потенциального будущего местоположения (например, точек 538-1, 538-2, 538-3, 538-4 и 538-5 потенциального будущего местоположения), связанных с данной одной из множества прогнозируемых траекторий (например, прогнозируемой траекторией 526), чтобы вычислить совокупную оценку.
[0153] Более высокая совокупная оценка, связанная с данной точкой потенциального будущего местоположения (например, точкой 538-2 потенциального будущего местоположения), может быть характерной для маловероятной быстрой смены объектом (например, объект 518) полосы движения. Точно так же более низкая совокупная оценка, связанная с данной точкой потенциального будущего местоположения (например, точкой 538-4 потенциального будущего местоположения), может представлять маловероятное зигзагообразное поведение объекта 518 (и, следовательно, такие сценарии менее вероятны). С этой целью в некоторых неограничивающих вариантах осуществления точки потенциального будущего местоположения (например, точки 538-1, 538-2 и 538-3 потенциального будущего местоположения), связанные с данной прогнозируемой траекторией (например, прогнозируемой траекторией 538), имеющие более высокие совокупные оценки, связаны с соответствующими полосами движения (например, полосами 506 и 508 движения) как основанные на более «реалистичной» гипотезе.
[0154] В некоторых неограничивающих вариантах осуществления модуль 306 прогнозирования местоположения может быть выполнен с возможностью вычисления суммы оценок, назначенных каждой из точек потенциального будущего местоположения (например, точек 538-1, 538-2, 538-3, 538-4 и 538-5 потенциального будущего местоположения), связанных с данной одной из множества прогнозируемых траекторий (например, прогнозируемой траекторией 526), и суммирование может представлять совокупную оценку.
[0155] В другом неограничивающем варианте осуществления модуль 306 прогнозирования местоположения может быть выполнен с возможностью вычисления среднего значения оценок, назначенных каждой из точек потенциального будущего местоположения (например, точек 538-1, 538-2, 538-3, 538-4 и 538-5 потенциального будущего местоположения), связанных с данной одной из множества прогнозируемых траекторий (например, прогнозируемой траекторией 526), и среднее значение может представлять совокупную оценку. Без ограничения объема настоящего раскрытия среднее значение может быть средним значением, медианой или модой оценок.
ЭТАП 412: определение прогнозируемой точки местоположения в пределах множества полос движения для по меньшей мере одного объекта в будущий момент времени.
[0156] Возвращаясь к фиг. 4, способ 400 переходит к заключительному этапу 412, на котором на основе совокупной оценки электронное устройство 210 определяет прогнозируемое местоположение по меньшей мере одного объекта в пределах множества полос движения в будущий момент времени.
[0157] Ссылаясь на фиг. 3 и 5, в некоторых неограничивающих вариантах осуществления электронное устройство 210 (в частности, модуль 306 прогнозирования местоположения) может быть выполнено с возможностью определения прогнозируемых местоположений объекта (например, объекта 516) в пределах множества полос движения (например, множество полос 502, 504, 506 и 508 движения) в будущий момент времени на основе связей точек потенциального будущего местоположения (например, точек 538-1, 538-2, 538-3 потенциального будущего местоположения) заданной прогнозируемой траектории (например, прогнозируемой траектории 538) с полосой движения (например, полосами 506 и 508 движения).
[0158] В некоторых неограничивающих вариантах осуществления прогнозируемое местоположение может быть одной из точек потенциального будущего местоположения. В некоторых неограничивающих вариантах осуществления прогнозируемое местоположение может быть расположено в конце данной одной из множества прогнозируемых траекторий (например, прогнозируемых траекторий 528, 532, 534, 538). В некоторых других неограничивающих вариантах осуществления прогнозируемое местоположение может быть расположено в начале данной одной из множества прогнозируемых траекторий (например, прогнозируемых траекторий 528, 532, 534, 538).
[0159] Предполагается, что для безопасного маневра SDC 220 может потребоваться минимальное безопасное расстояние от объектов (например, объектов 512, 516 и 518). В некоторых неограничивающих вариантах осуществления такое безопасное расстояние может быть либо заранее определено, либо задано как функция скорости SDC 220 и других объектов (например, объектов 512, 516 и 518). Весьма вероятно, что объект (не изображен), движущийся по той же полосе движения (например, 514), по которой в настоящее время движется SDC 220, изменит свои кинематические характеристики, из-за чего расстояние между такими объектами и SDC 220 может уменьшиться.
[0160] Кроме того, в некоторых случаях, если объекты (например, объекты 512 и 516) движутся по полосам движения (например, по множеству полос 502 и 506 движения), смежных с полосой движения (например, полосой 504 движения), по которой SDC 220 в настоящее время движется, весьма вероятно, что такие объекты (например, объекты 512 и 516) могут намереваться изменить свою соответствующую полосу движения (например, множество полос 502 и 506 движения) на полосу движения (например, полосу 504 движения), по которой в настоящее время движется SDC 220, из-за чего расстояние между такими объектами и SDC 220 может уменьшаться.
[0161] С этой целью в некоторых вариантах осуществления модуль 306 прогнозирования местоположения может определять прогнозируемое местоположение, которое может быть первой точкой будущего местоположения, связанной с данной одной из множества прогнозируемых траекторий (например, прогнозируемой траекторией 534), расположенных на полосе движения (например, полоса 504 движения), по которой в настоящее время движется SDC 220.
[0162] В некоторых неограничивающих вариантах осуществления для каждой из множества прогнозируемых траекторий модуль 306 прогнозирования местоположения может хранить совокупные оценки, точки потенциального будущего местоположения вместе с их будущими моментами времени и связи точек потенциального будущего местоположения с множество полос движения в памяти (например, памяти 130) таким образом, чтобы она могла быть доступна для дальнейшей обработки.
[0163] В некоторых неограничивающих вариантах осуществления модуль 308 вычисления траектории может определять заданную траекторию SDC 220 на участке дороги, что снижает риск столкновения между SDC 220 и объектами (например, объектами 512, 516, 518) на участке дороги. Предполагается, что в некоторых вариантах осуществления для определения этой снижающей риск столкновения траектории для SDC 220 на участке дороги электронное устройство 210 может использовать точки потенциального будущего местоположения вместе с их будущими моментами времени и точки потенциального будущего местоположения с множеством полос движения на участке дороги.
[0164] В некоторых неограничивающих вариантах осуществления модуль 308 вычисления траектории может быть выполнен с возможностью определения опорного пути 530 для SDC 220 в текущей полосе движения (например, полосе 504 движения). Следует отметить, что опорный путь 530 иногда может упоминаться как опорный путь «по умолчанию» SDC 220, поскольку предполагается, что в нормальных условиях SDC 220 должен перемещаться вдоль центральной линии текущей полосы движения (например, полосы 504 движения) по умолчанию. Действительно, разработчики настоящей технологии осознали, что в нормальных условиях, таких как, например, когда SDC 220 движется по прямой полосе движения, SDC 220 должен двигаться вдоль центральной линии этой текущей полосы движения (например, полосы 504 движения) в целях безопасности.
[0165] В одном примере, если SDC 220 предназначен для движения по опорному пути 530, модуль 308 вычисления траектории может непрерывно наблюдать точки потенциального будущего местоположения вместе с их будущими моментами времени и связями точек потенциального будущего местоположения с множеством полос движения (например, множество полос 502, 504, 506, 508 движения) на участке дорожной карты 500. В случае, если определено, что один или несколько объектов (например, объект 516, 518) възжают на текущую полосу движения (например, полосу 504 движения), по которой движется SDC 220, модуль 308 вычисления траектории может известить модуль 310 планирования движения.
[0166] На основе прогнозируемого местоположения объектов (например, объектов 516 и 518) в будущий момент времени при въезде на текущую полосу движения (например, полосу 504 движения) модуль 310 планирования движения может регулировать один или несколько параметров движения SDC 220. При этом модуль 310 планирования движения может запускать действия торможения, действия рулевого управления, действие скорости и/или действия ускорения. Такой запуск может привести к изменению ускорения SDC 220, изменению скорости SDC 220, изменению направления SDC 220 для изменения полосы движения, по которой SDC 220 движется в данный момент, изменению направления SDC для поворота и т.п.
[0167] В другом примере, если SDC 220 намерен изменить текущую полосу движения (например, полосу 504 движения), чтобы изменить траекторию SDC, модуль 308 вычисления траектории может анализировать точки потенциального будущего местоположения вместе с их будущими моментами времени и связи точек потенциального будущего местоположения с множеством полос движения (например, множеством полос 502, 504, 506, 508 движения) на участке дорожной карты 500, соответствующем различным объектам (например, объекты 512, 516, 518), а затем прогнозировать траекторию для SDC 220. При этом модуль 308 вычисления траектории проверяет, что SDC 220 может безопасно маневрировать и что между объектами (например, объектами 512, 516, 518) и SDC 220 может быть безопасное расстояние.
[0168] Следует четко понимать, что не все технические эффекты, упомянутые в настоящем документе, должны быть реализованы в каждом варианте осуществления настоящей технологии.
[0169] Модификации и улучшения вышеописанных реализаций настоящей технологии могут стать очевидными для специалистов в данной области техники. Предшествующее описание предназначено для того, чтобы быть примерным, а не ограничивающим. Таким образом, объем настоящей технологии ограничивается объемом прилагаемой формулы изобретения.
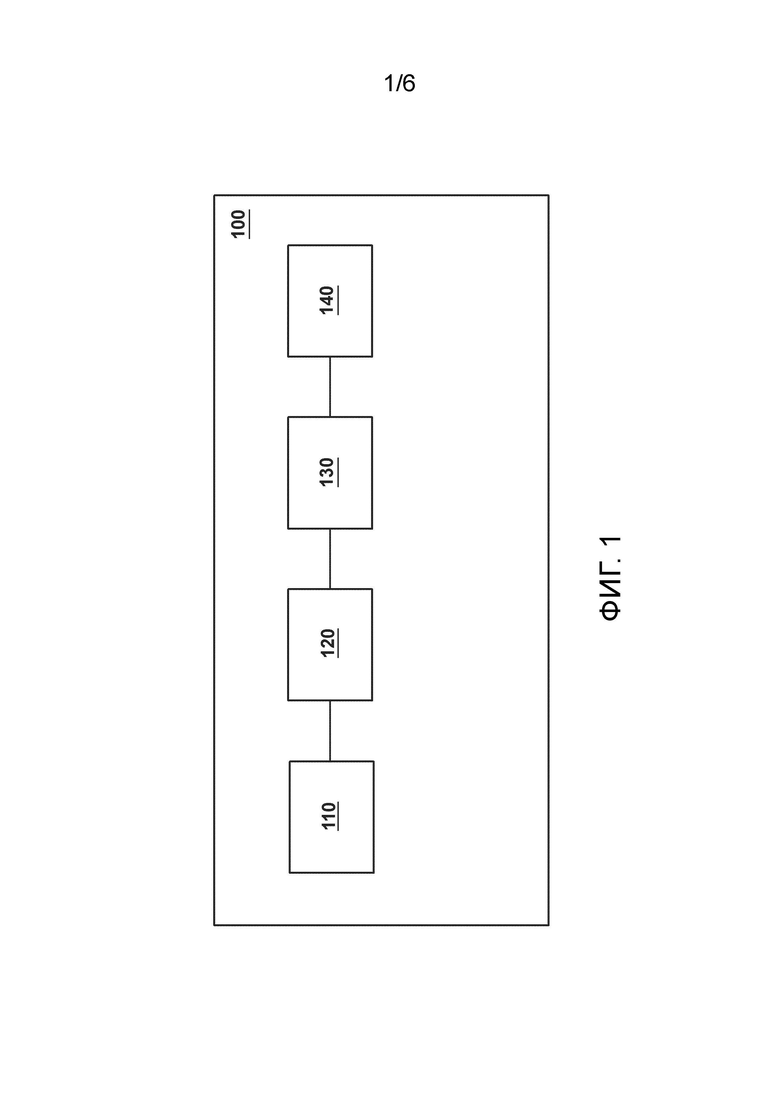
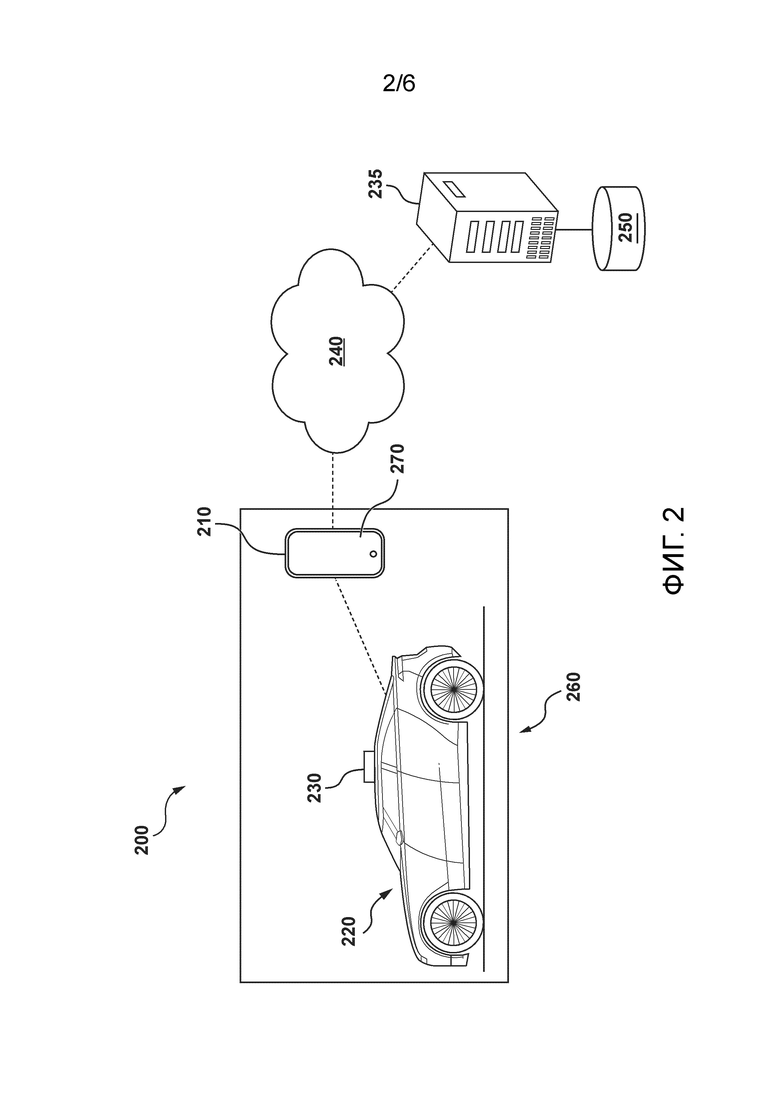
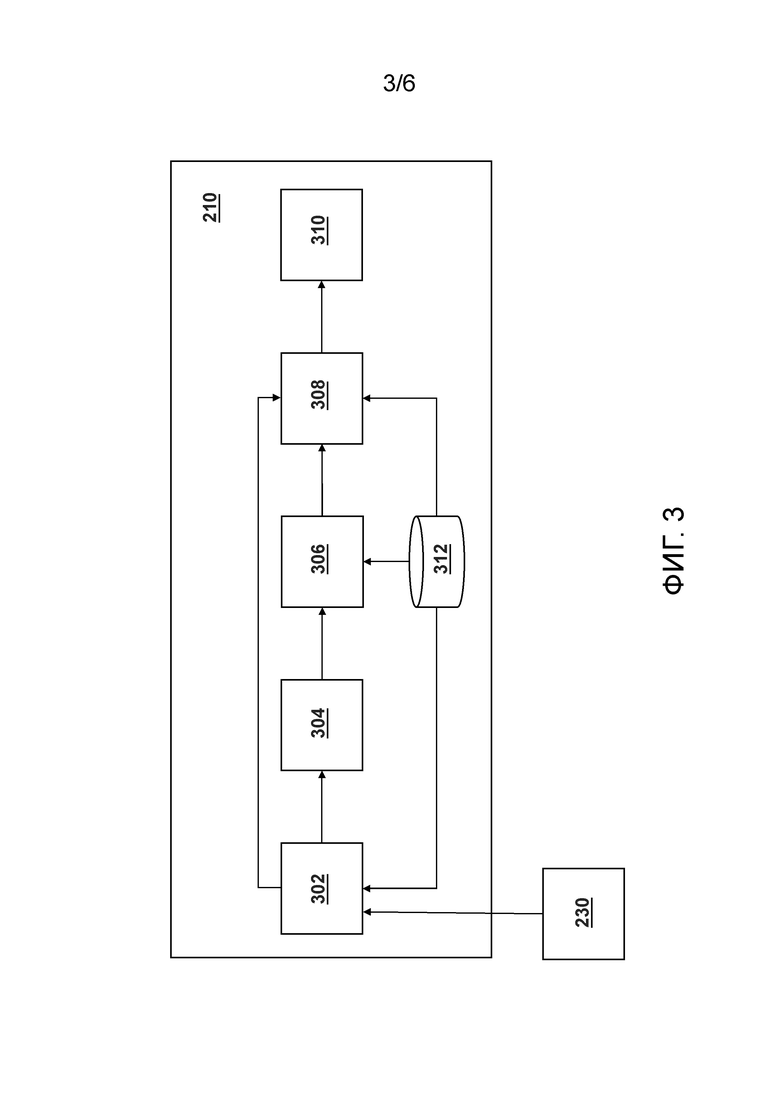
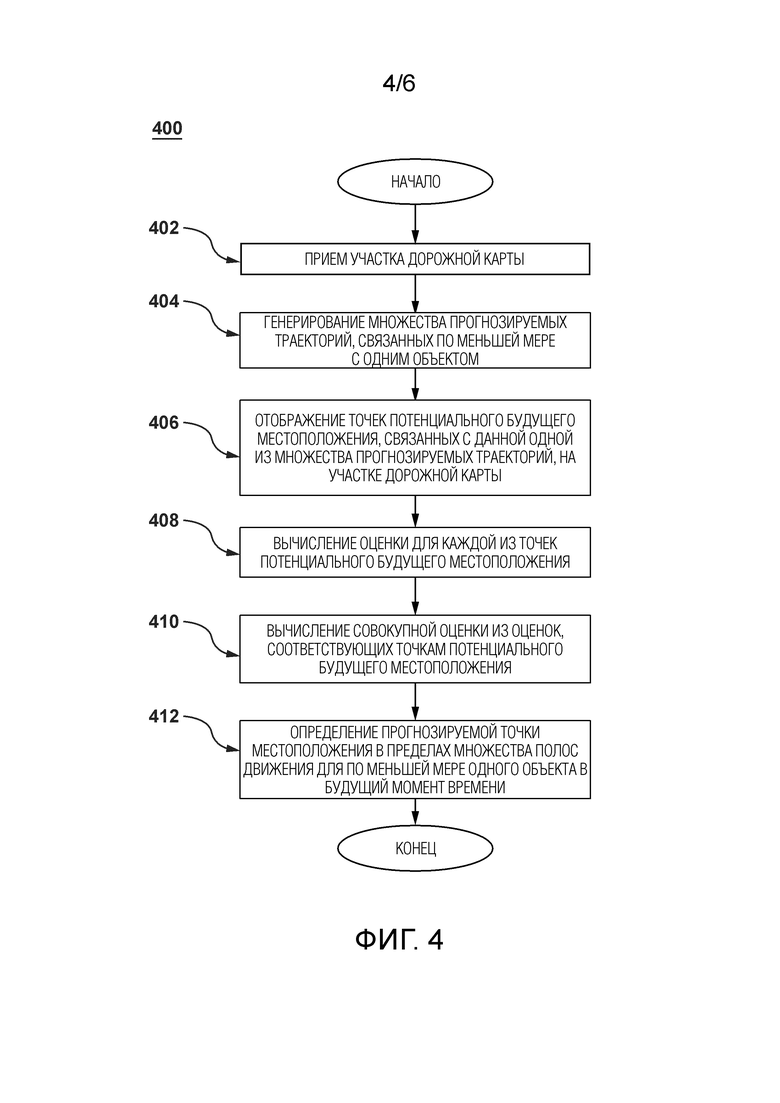
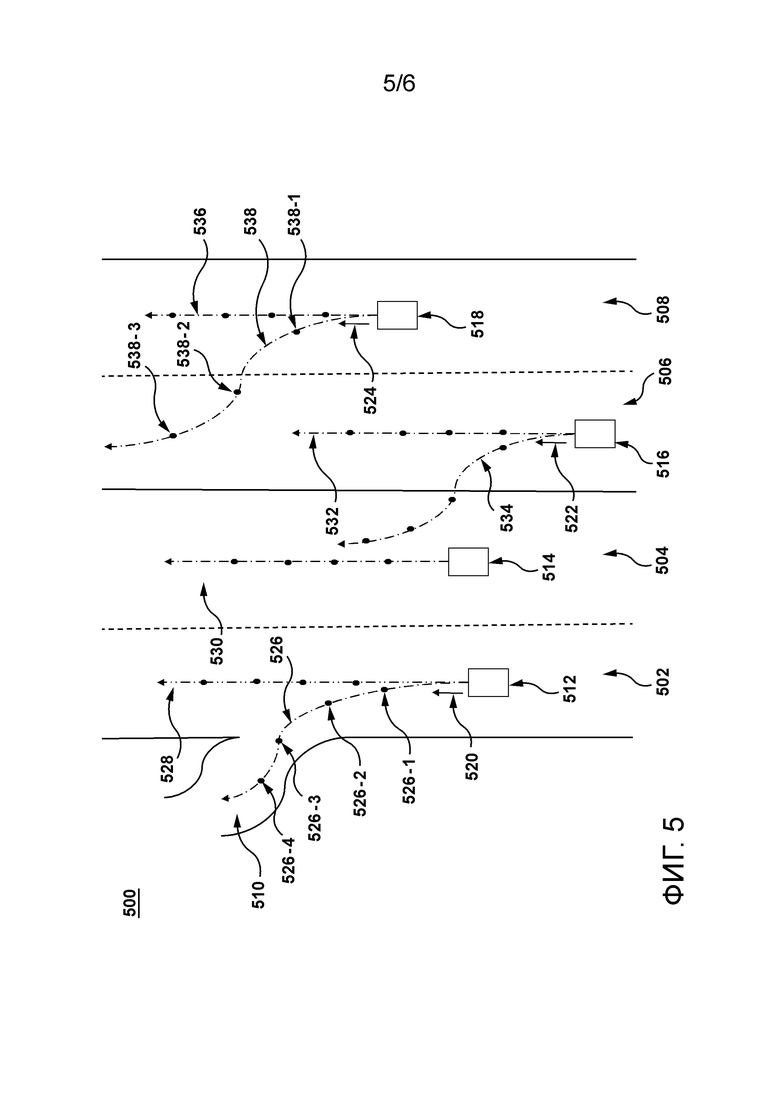
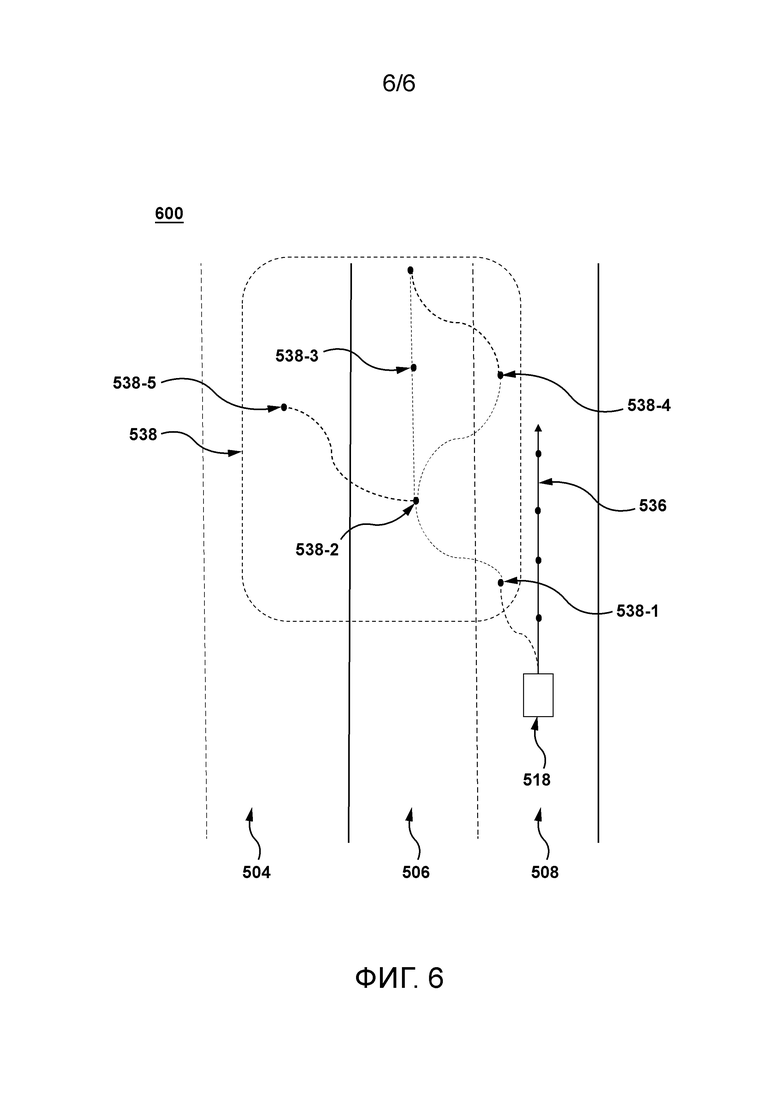
Группа изобретений относится к способу и устройству для генерации данных для управления беспилотным автомобилем (SDC). Способ включает в себя: i) прием участка дорожной карты, соответствующего окружению SDC и по меньшей мере одному объекту, ii) генерирование множества прогнозируемых траекторий, включая точки потенциального будущего местоположения по меньшей мере одного объекта, iii) наложение точек потенциального будущего местоположения на участок дорожной карты, iv) вычисление оценки для каждой из точек потенциального будущего местоположения, причем оценка представляет связь данной точки потенциального будущего местоположения с множеством полос движения в будущий момент времени, v) вычисление совокупной оценки из оценок, соответствующих точкам потенциального будущего местоположения, и vi) на основе совокупной оценки определение прогнозируемого местоположения по меньшей мере одного объекта в будущий момент времени. Устройство обеспечивает реализацию данного способа. Обеспечивается выполнение безопасного маневра. 2 н. и 18 з.п. ф-лы, 6 ил.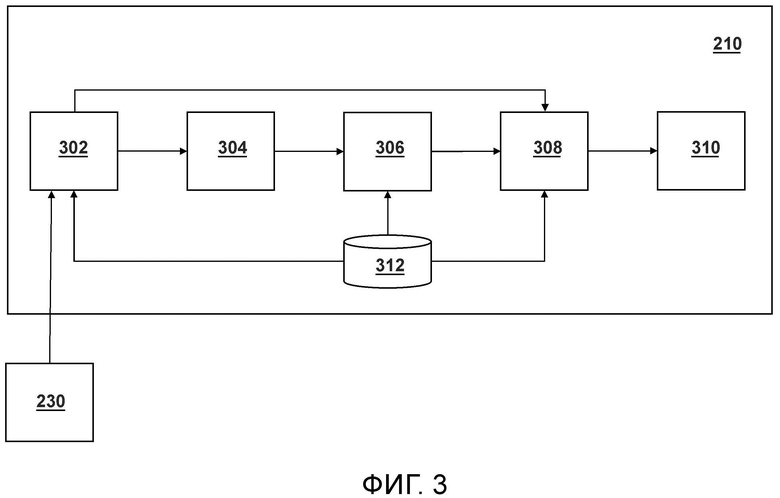
1. Способ прогнозирования маневра по меньшей мере одного объекта, причем по меньшей мере один объект находится поблизости от беспилотного автомобиля (SDC), причем SDC соединен с возможностью осуществления связи с электронным устройством, причем способ выполняется электронным устройством, причем способ содержит:
прием с помощью электронного устройства
участка дорожной карты, соответствующего окружению SDC и по меньшей мере одному объекту, причем участок дорожной карты включает в себя информацию о множестве полос движения;
генерирование с помощью электронного устройства
множества прогнозируемых траекторий, связанных по меньшей мере с одним объектом, причем каждая из множества прогнозируемых траекторий включает в себя точки потенциального будущего местоположения по меньшей мере одного объекта на участке дорожной карты;
для данной одной из множества прогнозируемых траекторий
наложение с помощью электронного устройства точек потенциального будущего местоположения, связанных с данной одной из множества прогнозируемых траекторий, на участок дорожной карты в соответствии с информацией о множестве полос движения;
вычисление с помощью электронного устройства оценок для каждой из точек потенциального будущего местоположения, связанных с данной одной из множества прогнозируемых траекторий, причем оценки представляют связь данной точки потенциального будущего местоположения из точек потенциального будущего местоположения с множеством полос движения в будущий момент времени;
вычисление с помощью электронного устройства совокупной оценки из оценок, соответствующих данной точке потенциального будущего местоположения из точек потенциального будущего местоположения, связанных с данной одной из множества прогнозируемых траекторий; и
на основе совокупной оценки определение с помощью электронного устройства прогнозируемого местоположения в пределах множества полос движения для по меньшей мере одного объекта в будущий момент времени.
2. Способ по п. 1, в котором информация о множестве полос движения включает в себя одно или более из следующего:
количество множества полос движения на участке дорожной карты;
геометрические свойства множества полос движения,
причем геометрические свойства множества полос движения включают в себя одно или более из следующего:
ширина каждой из множества полос движения,
кривизна каждой из множества полос движения;
количество выездов на участке дорожной карты;
отметка на участке дорожной карты, обозначающая одно или более из следующего:
первое указание поворота налево или направо,
второе указание выезда,
разделение между множеством полос движения.
3. Способ по п. 1, в котором участок дорожной карты представляет собой карту высокой четкости (HD).
4. Способ по п. 1, в котором множество прогнозируемых траекторий генерируется без учета множества полос движения на участке дорожной карты.
5. Способ по п. 1, в котором множество прогнозируемых траекторий основано на данных движения по меньшей мере одного объекта.
6. Способ по п. 1, в котором наложение точек потенциального будущего местоположения на участок дорожной карты содержит наложение точек потенциального будущего местоположения, связанных с данной одной из множества прогнозируемых траекторий, на множество полос движения.
7. Способ по п. 1, в котором наложение точек потенциального будущего местоположения на участок дорожной карты содержит генерирование множества гипотез, при этом заданная гипотеза из множества гипотез представляет взаимосвязь данной точки потенциального будущего местоположения из точек потенциального будущего местоположения с множеством полос движения.
8. Способ по п. 7, в котором совокупная оценка вычисляется как одно или более из следующего:
суммирования оценок, присвоенных данной точке потенциального будущего местоположения, связанной с данной одной из множества прогнозируемых траекторий, в соответствии с множеством гипотез;
среднего значения оценок, присвоенных данной точке потенциального будущего местоположения, связанной с данной одной из множества прогнозируемых траекторий, в соответствии с множеством гипотез.
9. Способ по п. 1, в котором вычисление оценок дополнительно содержит:
присвоение первой заранее заданной оценки данной точке потенциального будущего местоположения, если данная точка потенциального будущего местоположения и по меньшей мере одна из следующей точки потенциального будущего местоположения и предыдущей точки потенциального будущего местоположения расположены на той же полосе движения из множества полос движения, в которой расположена данная точка потенциального будущего местоположения; и
присвоение второй заранее заданной оценки данной точке потенциального будущего местоположения, если данная точка потенциального будущего местоположения не расположена на той же полосе движения из множества полос движения, в которой расположены следующая точка потенциального будущего местоположения или предыдущая точка потенциального будущего местоположения.
10. Способ по п. 9, в котором первая заранее заданная оценка выше, чем вторая заранее заданная оценка.
11. Способ по п. 1, причем способ дополнительно содержит регулировку электронным устройством параметров вождения SDC в соответствии с прогнозируемым местоположением по меньшей мере одного объекта в будущий момент времени.
12. Способ по п. 11, в котором регулировка параметров вождения SDC включает в себя одно или более из следующего:
изменение ускорения SDC;
изменение скорости SDC;
изменение направления SDC для изменения полосы движения из множества полос движения, по которой в настоящее время движется SDC;
изменение направления SDC для поворота.
13. Способ по п. 1, в котором SDC и по меньшей мере один объект перемещаются по меньшей мере в одном из следующих направлений:
в одном и том же направлении;
в противоположном направлении.
14. Способ по п. 1, в котором вычисление оценок для каждой из точек потенциального будущего местоположения включает в себя:
использование алгоритма машинного обучения (MLA), в котором точки потенциального будущего местоположения используются в качестве входных данных, и
выходными данными MLA являются оценки, соответствующие данной точке потенциального будущего местоположения из точек потенциального будущего местоположения.
15. Способ по п. 1, в котором:
более высокая совокупная оценка, связанная с данной точкой потенциального будущего местоположения, является характерной для маловероятной быстрой смены полосы движения по меньшей мере одного объекта между последовательными периодами времени с малым приращением изменения времени между ними;
более низкая совокупная оценка, связанная с данной точкой потенциального будущего местоположения, является характерной для маловероятного зигзагообразного поведения по меньшей мере одного объекта между последовательными периодами времени с малым приращением изменения времени между ними.
16. Способ по п.1, в котором объект является динамическим объектом.
17. Способ по п. 1, в котором прогнозируемое местоположение является одной из точек потенциального будущего местоположения.
18. Способ по п. 1, в котором прогнозируемое местоположение находится в одном или нескольких из следующего:
конец данной одной из множества прогнозируемых траекторий;
начало данной одной из множества прогнозируемых траекторий;
первая точка будущего местоположения, связанная с данной одной из множества прогнозируемых траекторий, расположенная на полосе движения из множества полос движения, по которой движется SDC.
19. Электронное устройство для прогнозирования маневра по меньшей мере одного объекта, причем по меньшей мере один объект находится поблизости от беспилотного автомобиля (SDC), причем электронное устройство соединено с возможностью осуществления связи с SDC, причем электронное устройство выполнено с возможностью:
принимать участок дорожной карты, соответствующий окружению SDC и по меньшей мере одному объекту, причем участок дорожной карты включает в себя информацию о множестве полос движения;
генерировать множество прогнозируемых траекторий, связанных по меньшей мере с одним объектом, причем каждая из множества прогнозируемых траекторий включает в себя точки потенциального будущего местоположения по меньшей мере одного объекта на участке дорожной карты;
для данной одной из множества прогнозируемых траекторий,
накладывать точки потенциального будущего местоположения, связанные с данной одной из множества прогнозируемых траекторий, на участок дорожной карты, в соответствии с информацией о множестве полос движения;
вычислять оценки для каждой из точек потенциального будущего местоположения, связанных с данной одной из множества прогнозируемых траекторий, причем оценки представляют связь данной точки потенциального будущего местоположения из точек потенциального будущего местоположения с множеством полос движения в будущий момент времени;
вычислять совокупную оценку из оценок, соответствующих данной точке потенциального будущего местоположения из точек потенциального будущего местоположения, связанных с данной одной из множества прогнозируемых траекторий; и
на основе совокупной оценки определять прогнозируемое местоположение в пределах множества полос движения по меньшей мере одного объекта в будущий момент времени.
20. Электронное устройство по п. 19, в котором электронное устройство генерирует множество прогнозируемых траекторий без учета множества полос движения на участке дорожной карты.
| US 2017197627 A1, 13.07.2017 | |||
| US 2010082195 A1, 01.04.2010 | |||
| US 2004090117 A1, 13.05.2004 | |||
| US 2009076702 A1, 19.03.2009 | |||
| US 2020172093 A1, 04.06.2020. |

