1. Предлагаемое техническое решение относится к электротехнике, а точнее к способам управления индукторными электрическими машинами, имеющими зубчатый безобмоточный ротор и зубчатый статор, на котором расположены одна или несколько фазных обмоток, каждая из которых питается от полупроводникового конвертора (преобразователя частоты). Предлагаемый способ регулирования и устройство для его осуществления могут найти место в электрических машинах, предназначенных для работы с высокой частотой вращения (несколько десятков тысяч об/мин).
Машины рассматриваемого класса (SRM - switched reluctance motor) в отечественной технической литературе не имеют устоявшегося названия. Новочеркасская научная школа обычно использует название «реактивный индукторный двигатель» (машина, генератор). Московская научная школа использует название «вентильно-индукторный двигатель» (машина, генератор). В настоящем документе используется последнее название.
Известны способы формирования тока в фазных обмотках вентильно-индукторного (реактивного индукторного) двигателя с помощью полумостового конвертора (инвертора напряжения), каждая фаза которого содержит два силовых ключа [1, 2, 3]. Подобные вентильно-индукторные машины работают с однополярным намагничиванием зубцов статора, т.е. направление тока, подаваемого от конвертора в обмотку статора, в течение всего периода вращения ротора не изменяется по направлению. При этом индукция в зубцах статора изменяется от значения остаточной индукции Br (residual), когда ток в обмотке статора равен нулю до максимального значения Bs (saturation), когда ток в обмотке статора максимален, и обратно до Br.
Этот способ вполне приемлем, поскольку пондеромоторные силы, порождающие вращающий момент, не зависят от направления магнитного потока, а следовательно. от направления тока в обмотках статора. При указанном способе управления зубцы и ярмо ротора за период вращения (за один оборот) перемагничиваются от максимального значения индукции в плюсовой зоне (+Bs) до максимального значения индукции в минусовой зоне (-Bs) и обратно. В зависимости от типа машины (чисел зубцов статора и ротора) это перемагничивание за один оборот может быть однократным или многократным. При относительно небольших частотах вращения (до единиц тысяч об/мин) потери в роторе от перемагничивания (гистерезис) и вихревых токов, обычно суммарно называемые «потери в стали» не вызывают заметного теплового эффекта (нагрева ротора).
Однако в вентильно-индукторных машинах с частотами вращения от 10 до 100 тысяч об/мин потери в стали (вследствие высокой частоты перемагничивания ротора) составляют весьма значительную часть общих потерь и вызывают сильный нагрев ротора, снижая ресурс работы подшипников. Осуществить эффективное охлаждение ротора, особенно в машинах большой мощности, например, в турбогенераторах мощностью сотни киловатт, затруднительно, как вследствие значительных размеров ротора, так и вследствие конструктивных причин. Это, в частности, создает большие проблемы при конструировании подшипниковых узлов.
2. Задача, на решение которой направлено заявляемое техническое решение, заключается в том, чтобы исключить полное перемагничивание зубцов (а в ряде случаев и ярма) ротора, заменив его частичным размагничиванием-намагничиванием и тем самым уменьшить потери в стали ротора и нагрев ротора от этих потерь. Как будет видно из дальнейшего, уменьшение потерь в стали ротора достигается ценой увеличения потерь в стали статора. Тем не менее общий технический эффект - положительный, поскольку обеспечить теплоотвод от статора электрической машины значительно проще и дешевле и выделяемое тепло в этом случае практически не оказывает влияния на подшипниковые узлы.
В приведенном ниже описании предложенного технического решения рассматриваются, в качестве примера:
- трехфазная вентильно-индукторная электрическая машина, имеющая 6 зубцов (Z1=6) на статоре и 4 зубца (Z2=4) на роторе (Z1/Z2=6/4) и
- трехфазная вентильно-индукторная электрическая машина, имеющая 6 зубцов (Z1=6) на статоре и 2 зубца (Z2=2) на роторе (Z1/Z2=6/2),
однако приведенные рассуждения могут быть распространены на машины с другими числами зубцов статора и ротора, например, для варианта Z1/Z2=12/4.
3. Желаемый эффект (решение поставленной задачи) - уменьшение потерь в стали и нагрев ротора от этих потерь - достигается тем, что в способе управления высокооборотной индукторной электрической машиной, имеющей зубчатый безобмоточный ротор и зубчатый статор, на котором расположены одна или несколько фазных обмоток, каждая из которых питается от полупроводникового конвертора, имеющей также систему управления, содержащую датчик положения ротора, заключающийся в том, что в соответствии с сигналами датчика положения ротора к обмоткам фаз последовательно прикладывают импульсы напряжения, согласно предложенному техническому решению управляют следующим образом (способом): в каждой из фазных обмоток при первом (нечетном) приближении какого-либо зубца ротора к зубцу статора, несущему обмотку определенной фазы (например, фазы А), подлежащую возбуждению в соответствии с сигналом датчика положения ротора, импульс напряжения подают с полярностью одного направления (например, положительного), а при втором (четном) приближении этого же зубца ротора к диаметрально расположенному зубцу статора, несущему обмотку той же фазы (например, фазы А), подлежащую возбуждению в соответствии с сигналом датчика положения ротора, импульс напряжения подают с полярностью противоположного направления (отрицательного), и таким образом обеспечивают за каждый оборот ротора неизменное направление магнитной индукции в зубцах ротора (в половине зубцов положительное, в другой половине - отрицательное), т.е. обеспечивают пульсирующее значение индукции без перемагничивания.
4. Ниже представлены следующие иллюстрации, характеризующие сущность предлагаемого технического решения.
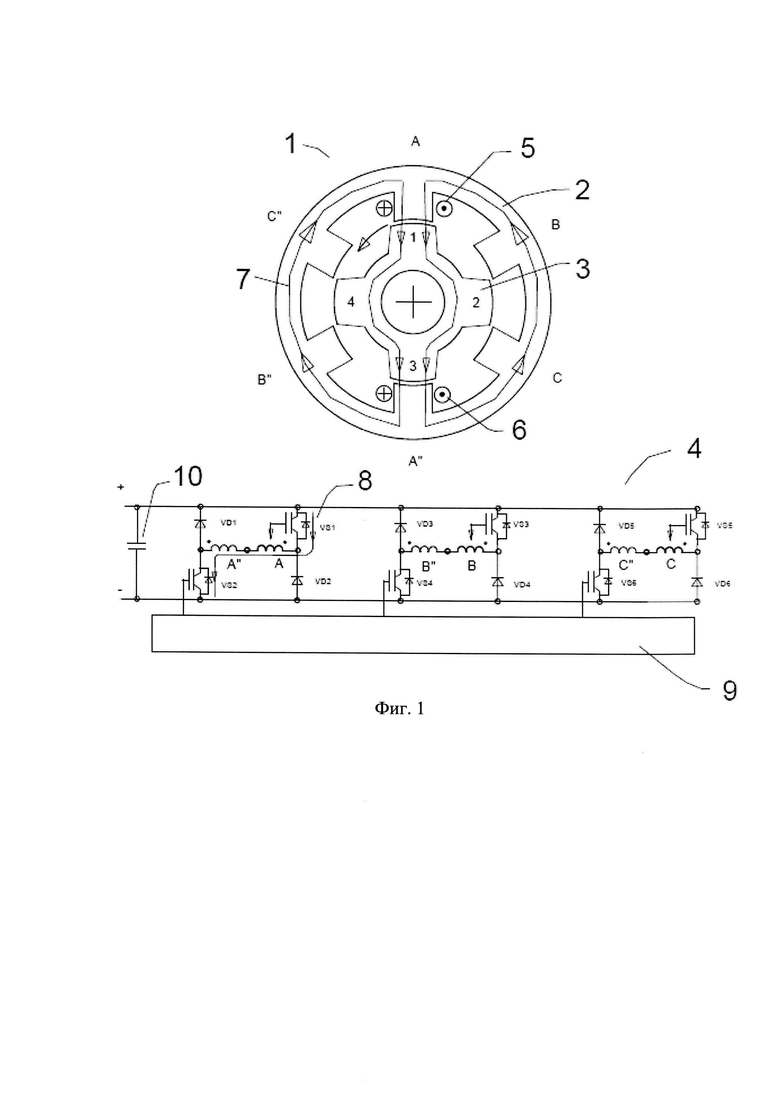
На фиг. 1 представлен традиционный вид трехфазной вентильно-индукторной машины, имеющей 6 зубцов (Z1=6) на статоре 2 и 4 зубца (Z2=4) на роторе 3 (Z1/Z2=6/4) и преобразователя, обеспечивающего протекание тока по фазным обмоткам машины.
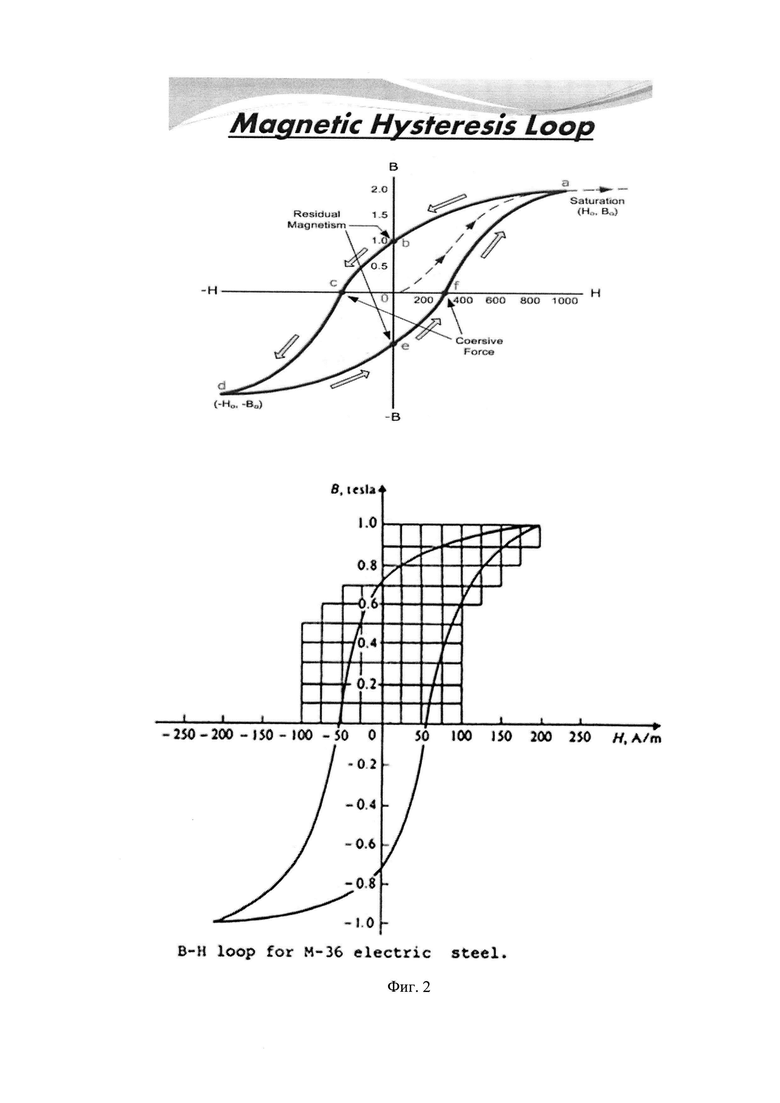
На фиг. 2 представлены варианты вида петли гистерезиса электротехнической стали.
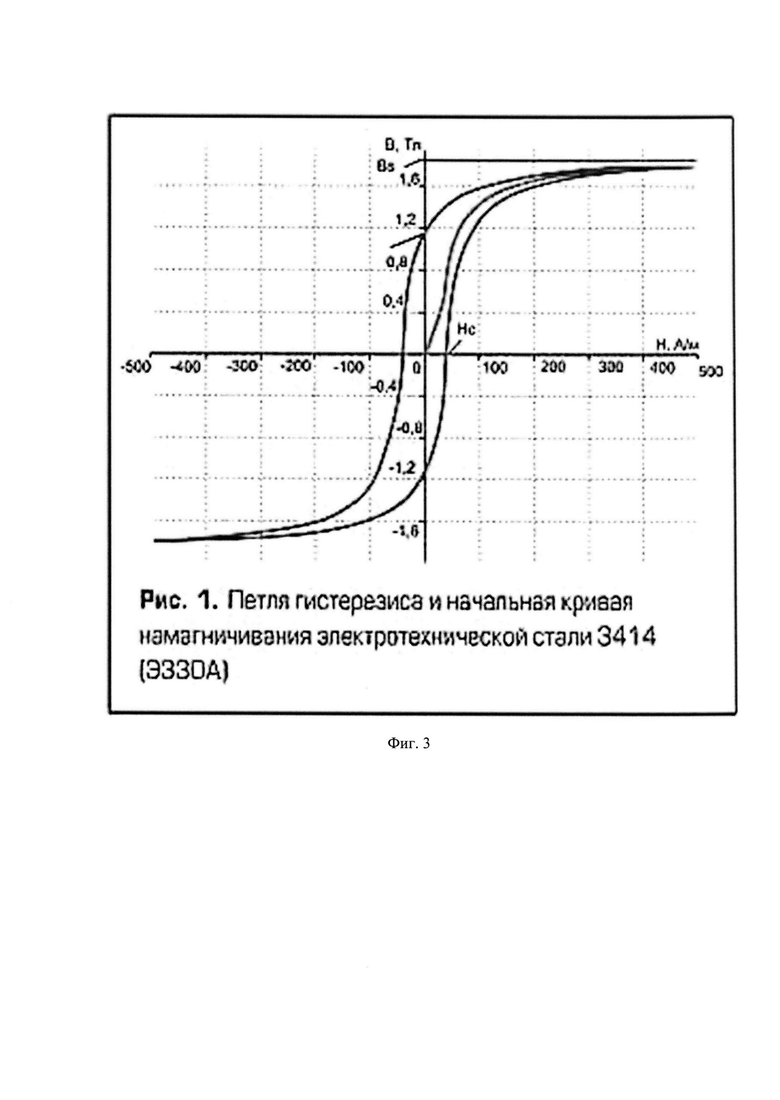
На фиг. 3 представлен вид петли гистерезиса электротехнической стали 3414.
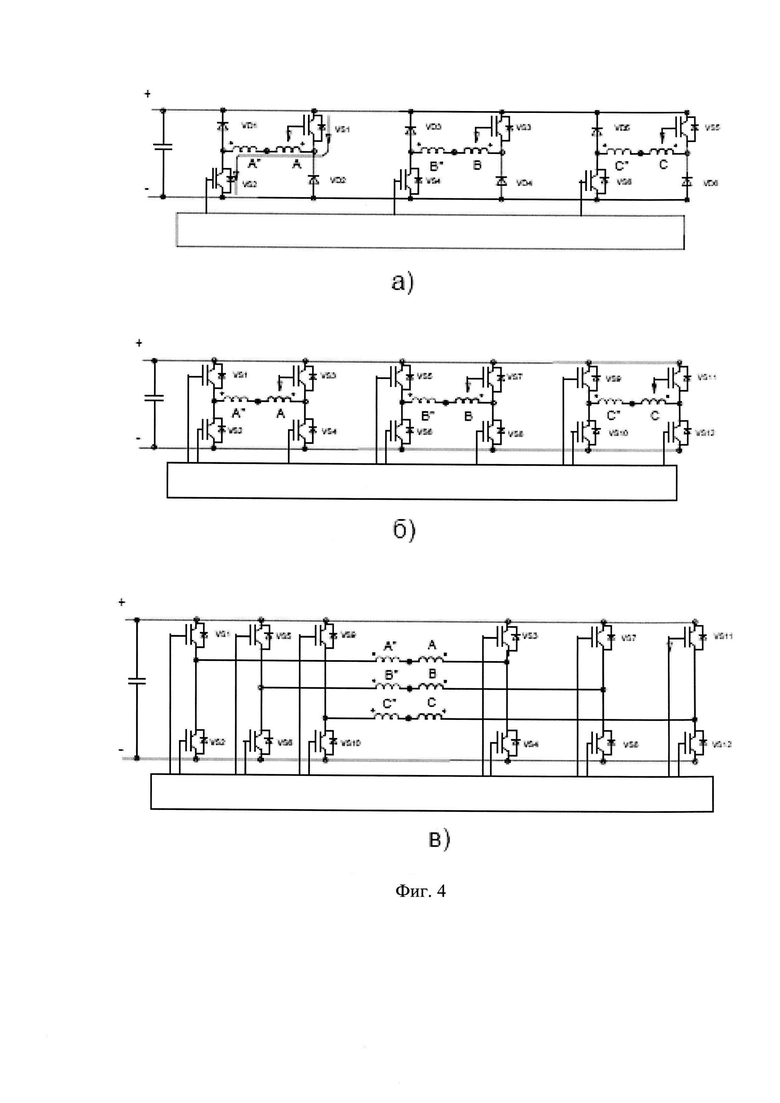
На фиг. 4 представлены схемы преобразователей для вентильно-индукторной электрической машины:
фиг. 4а - схема традиционного преобразователя;
фиг. 4б, 4в - схема преобразователя для реализации предлагаемого способа управления.
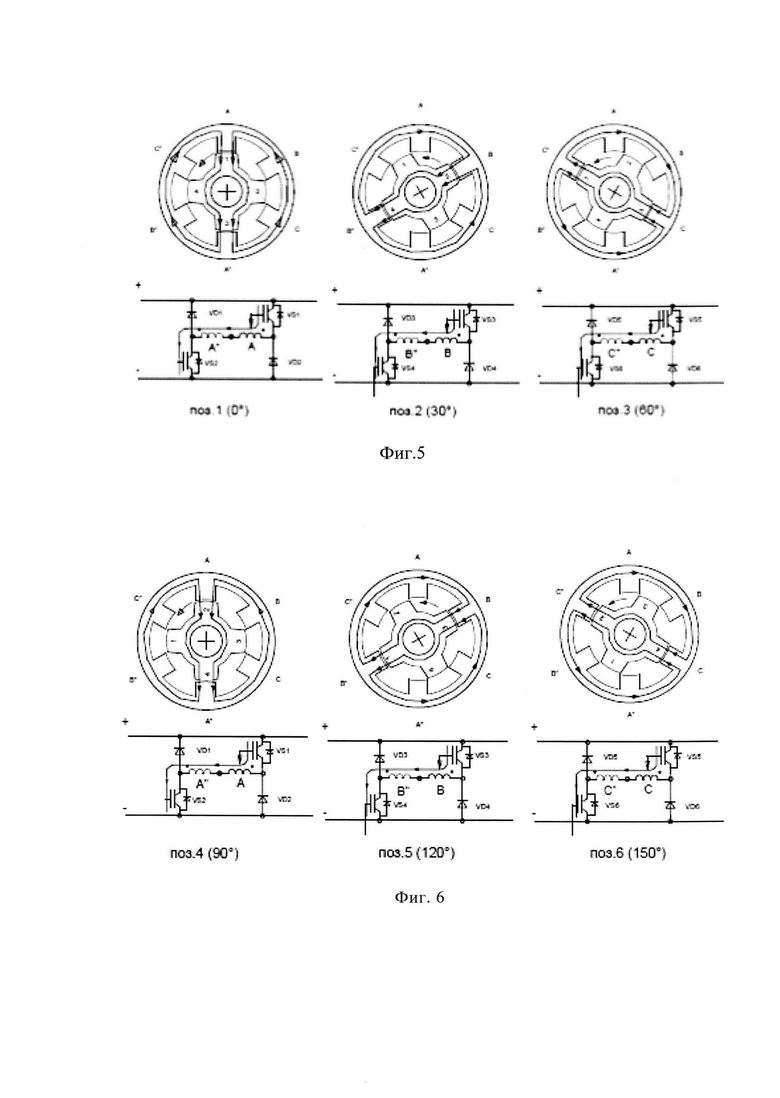
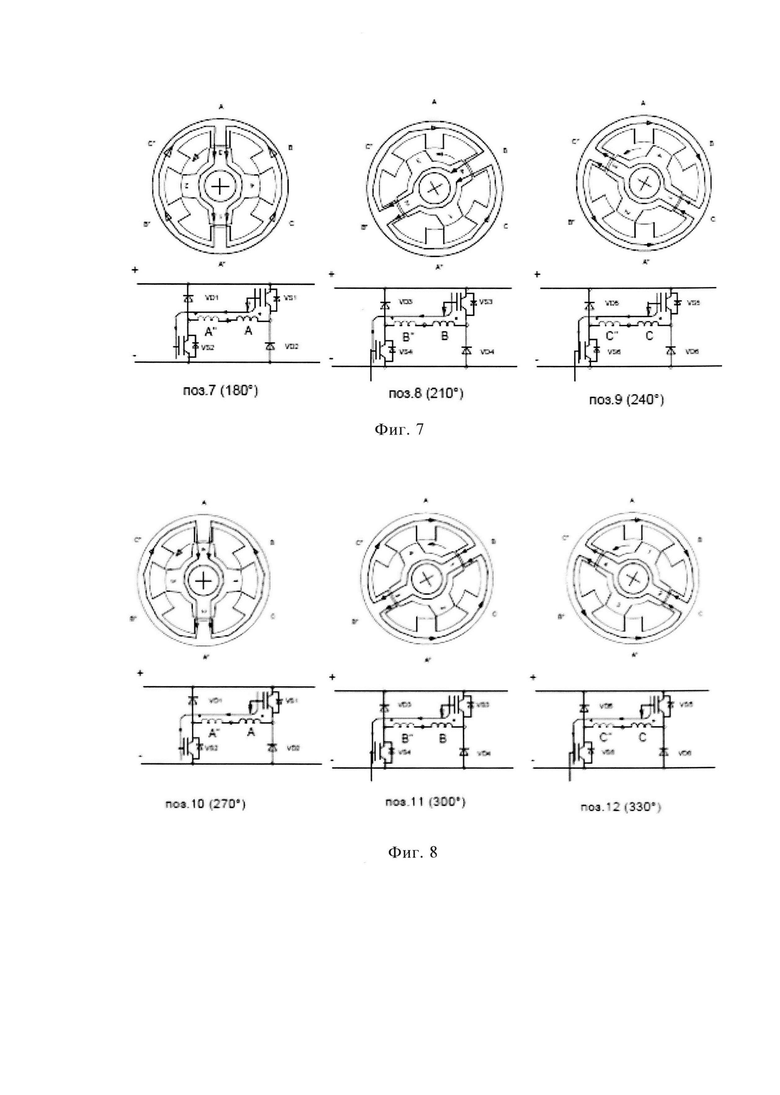
На фиг. 5…фиг. 8 представлены положения ротора вентильно-индукторной машины Z1/Z2=6/4 в начальной позиции (поз. 1, 0°) и затем при его повороте на 30° (поз. 2, 30°), 60° (поз. 3, 60°), 90° (поз. 4, 90°) и так далее до поз. 12, 330°. Для каждого положения ротора изображены пути прохождения магнитного потока по зубцам и ярмам и направление тока в фазах для традиционного способа управления, описанного в [1, 2, 3].
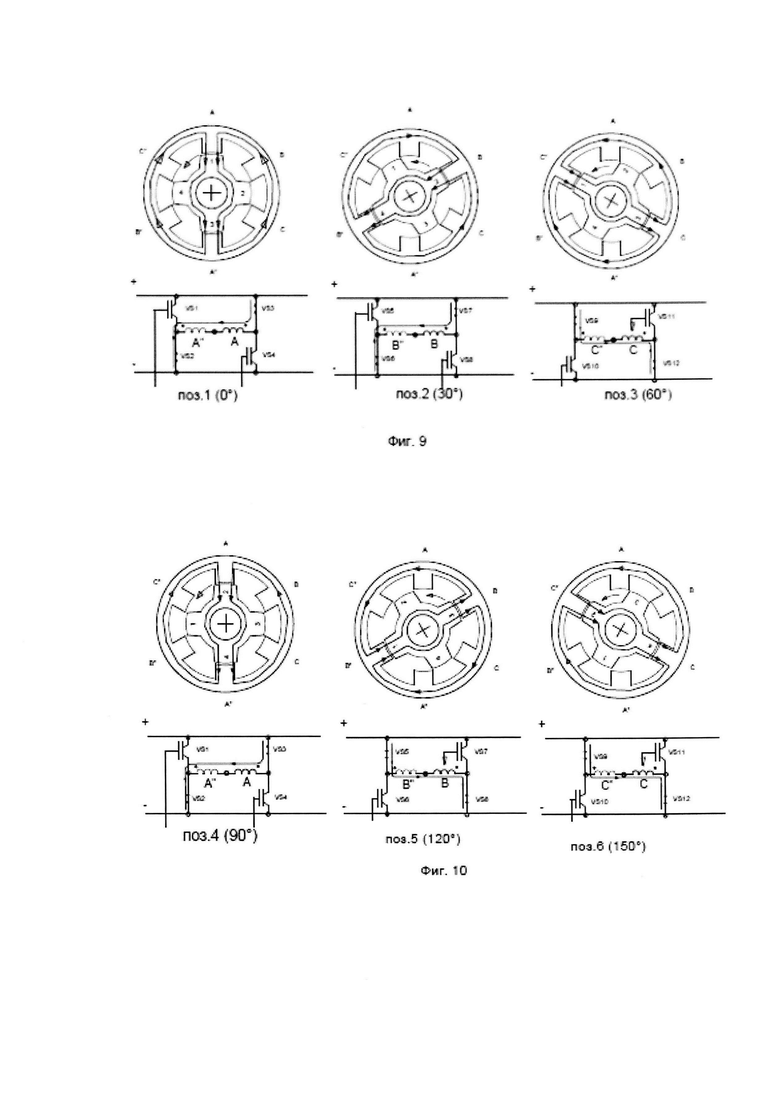
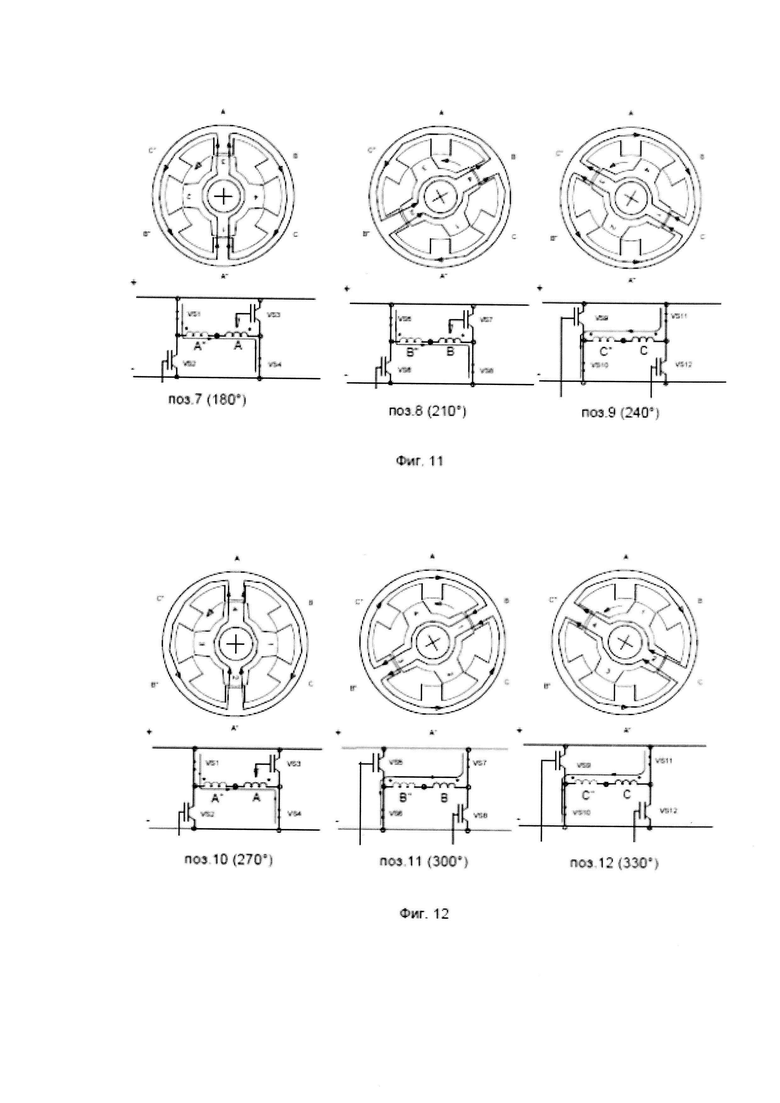
На фиг. 9…фиг. 12 представлены положения ротора вентильно-индукторной машины Z1/Z2=6/4 в начальной позиции (поз. 1, 0°) и затем при его повороте на 30° (поз. 2, 30°), 60° (поз. 3, 60°), 90° (поз. 4, 90°) и так далее до поз. 12, 330°. Для каждого положения ротора изображены пути прохождения магнитного потока по зубцам и ярмам и направление тока в фазах для предлагаемого способа управления.
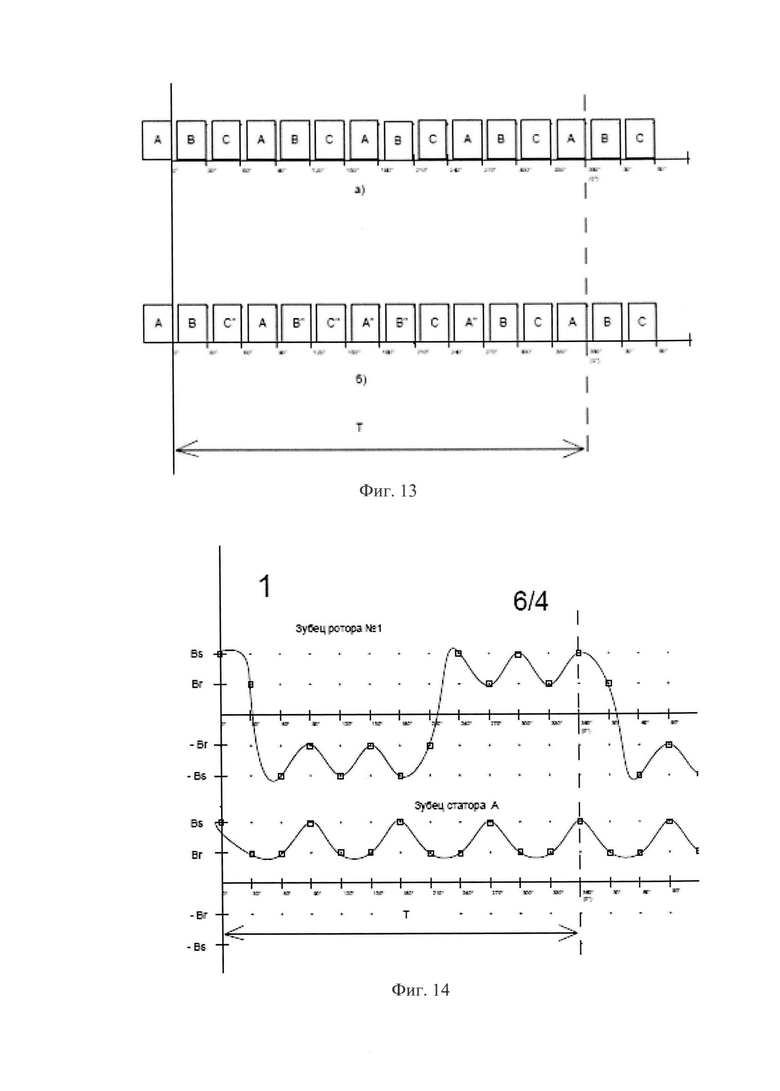
На фиг. 13а условно показаны сигналы от датчика положения ротора, обеспечивающие переключение транзисторов в схеме на фиг. 4а. вентильно-индукторной машины Z1/Z2=6/4.
На фиг. 13б условно показаны сигналы, обеспечивающие переключение транзисторов в схеме на фиг. 4в вентильно-индукторной машины Z1/Z2=6/4.
На фиг. 14 показан характер изменения индукции в зубцах ротора и зубцах статора машины Z1/Z2=6/4 при управлении по способу, описанному в [1, 2, 3].
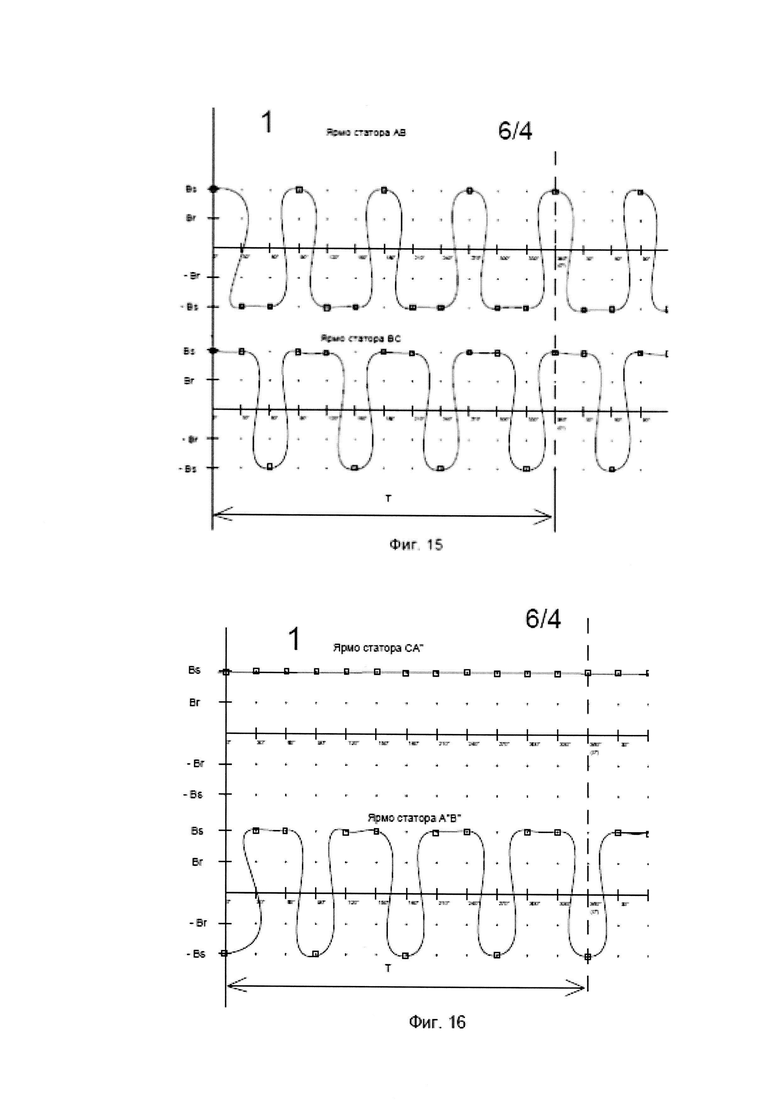
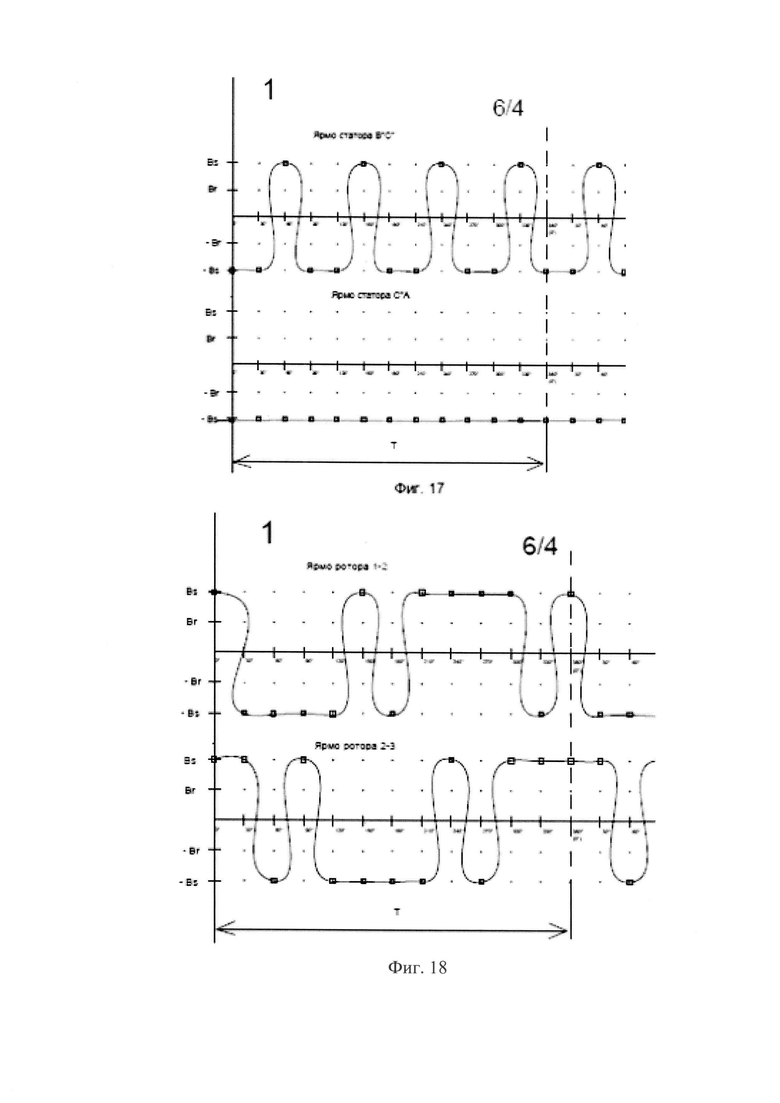
На фиг. 15, фиг. 16 и фиг. 17 показан характер изменения индукции в шести частях ярма статора машины Z1/Z2=6/4 при управлении по способу, описанному в [1, 2, 3].
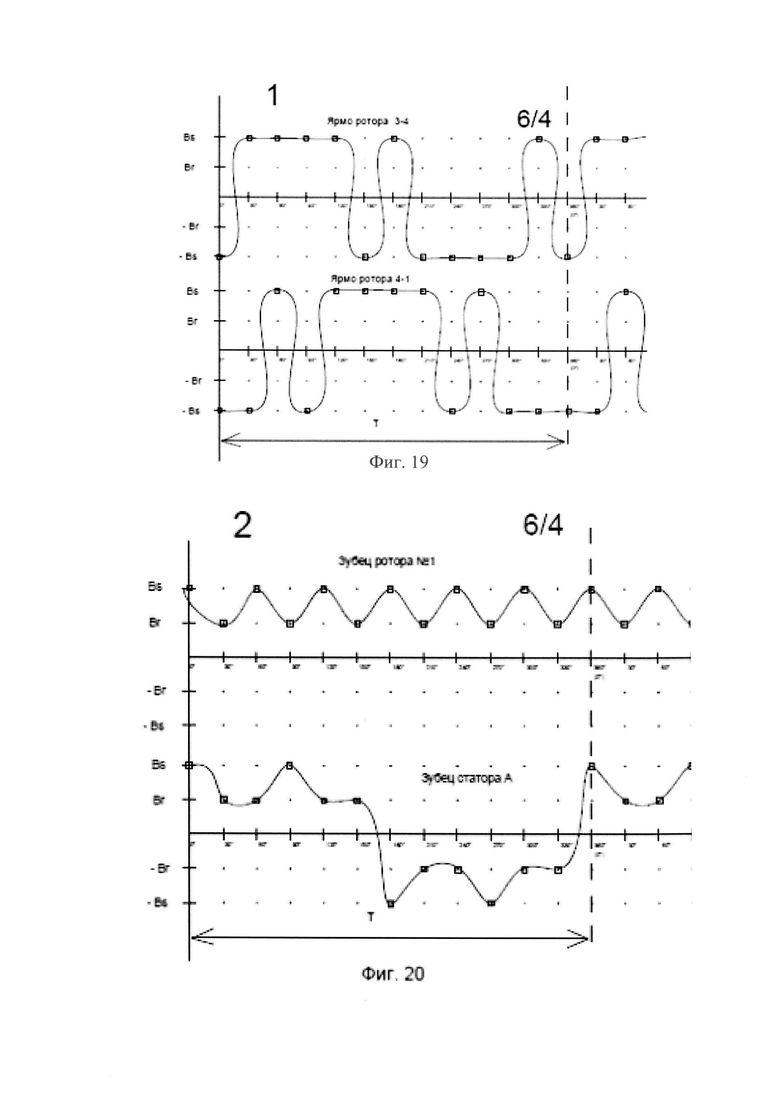
На фиг. 18 и фиг. 19 показан характер изменения индукции в четырех частях ярма ротора машины Z1/Z2=6/4 при управлении по способу, описанному в [1, 2, 3].
На фиг. 20 показан характер изменения индукции в зубцах ротора и зубцах статора машины Z1/Z2=6/4 при управлении по предлагаемому способу.
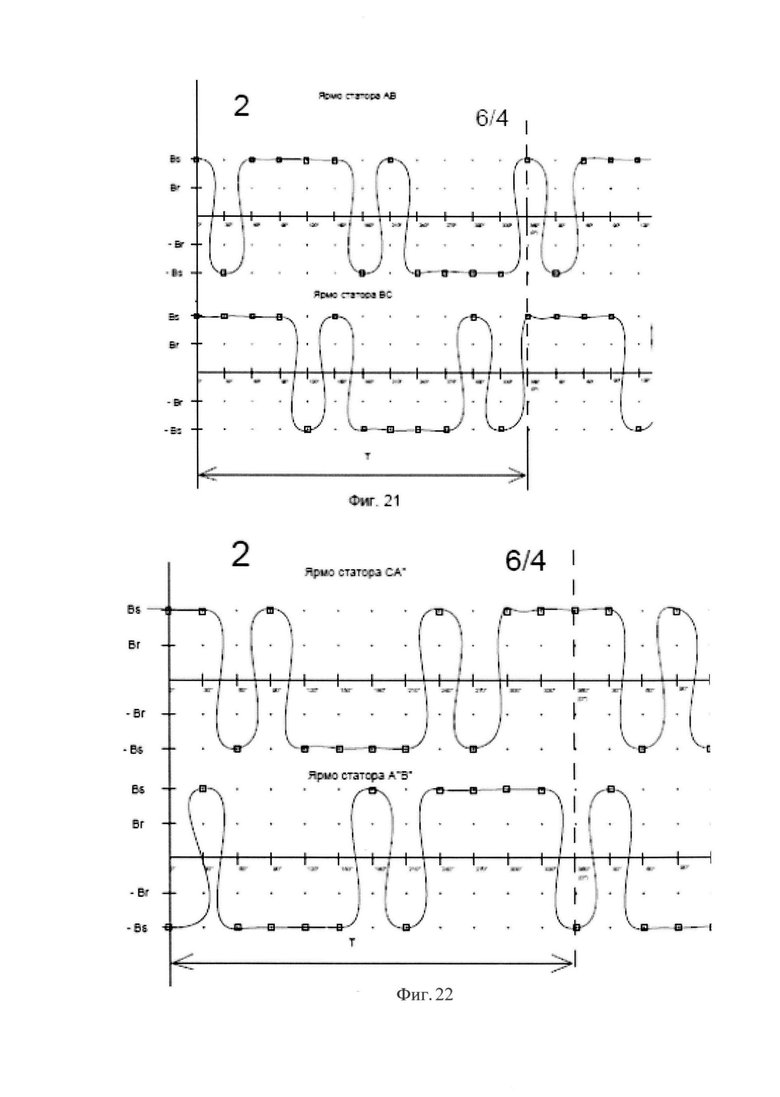
На фиг. 21, фиг. 22 и фиг. 23 показан характер изменения индукции в шести частях ярма статора машины Z1/Z2=6/4 при управлении по предлагаемому способу.
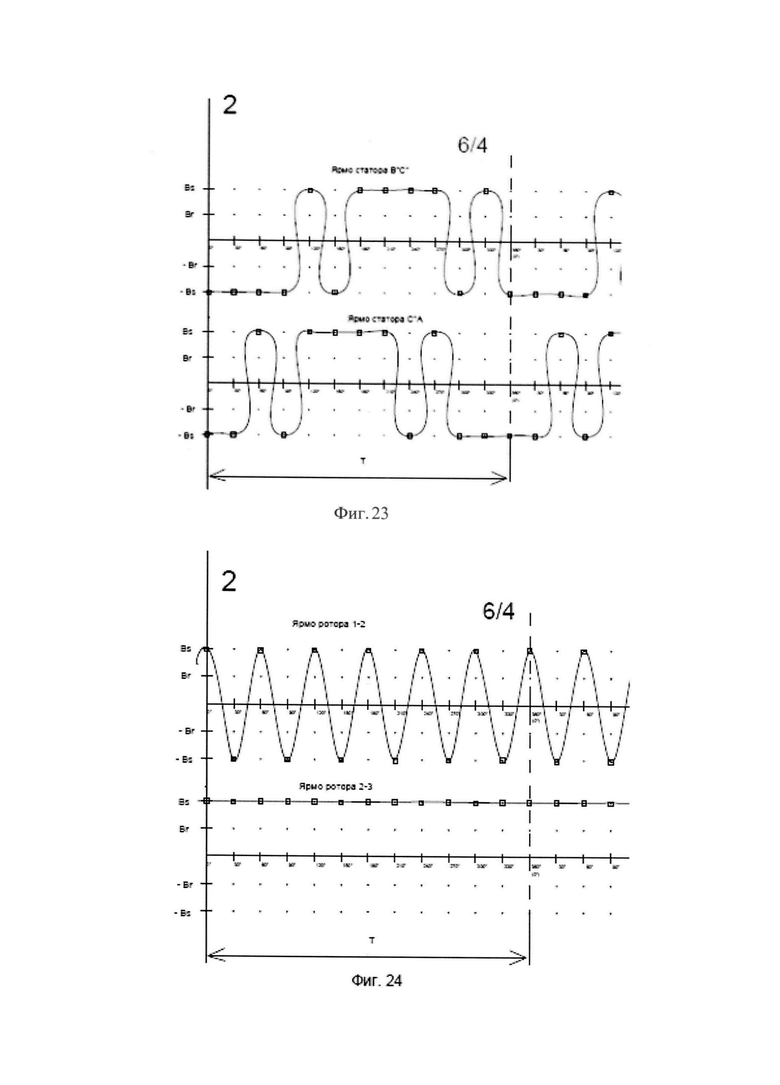
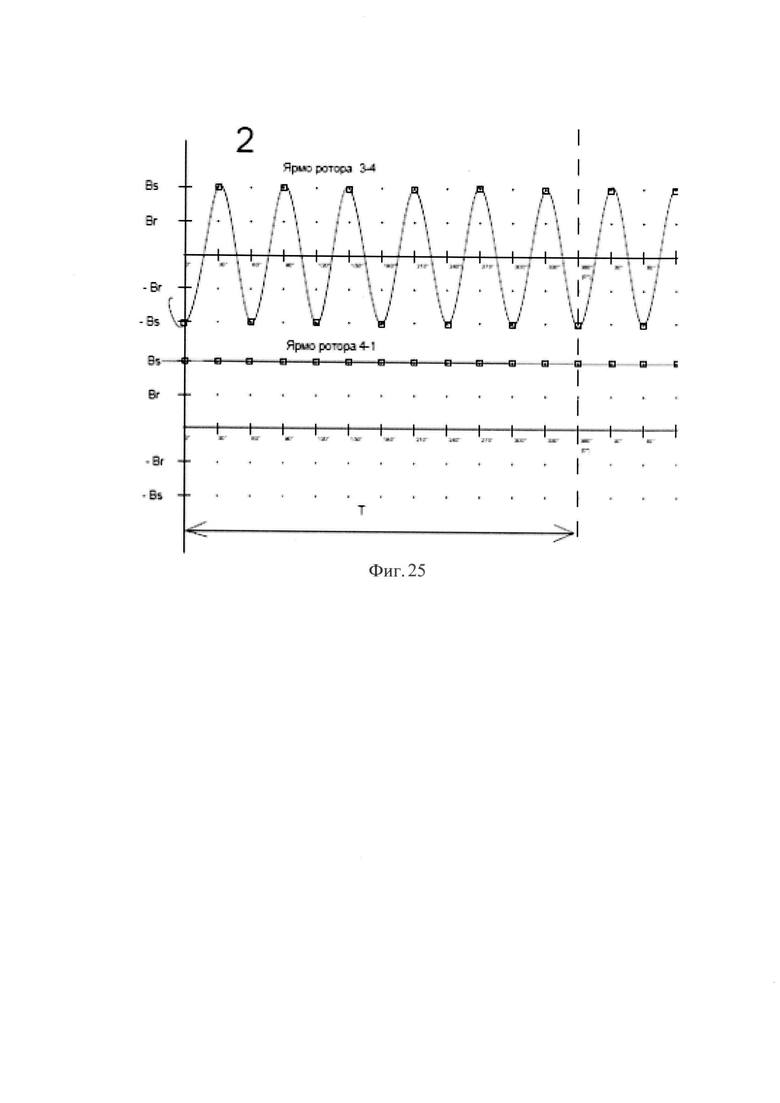
На фиг. 24 и фиг. 25 показан характер изменения индукции в четырех частях ярма ротора машины Z1/Z2=6/4 при управлении по предлагаемому способу.
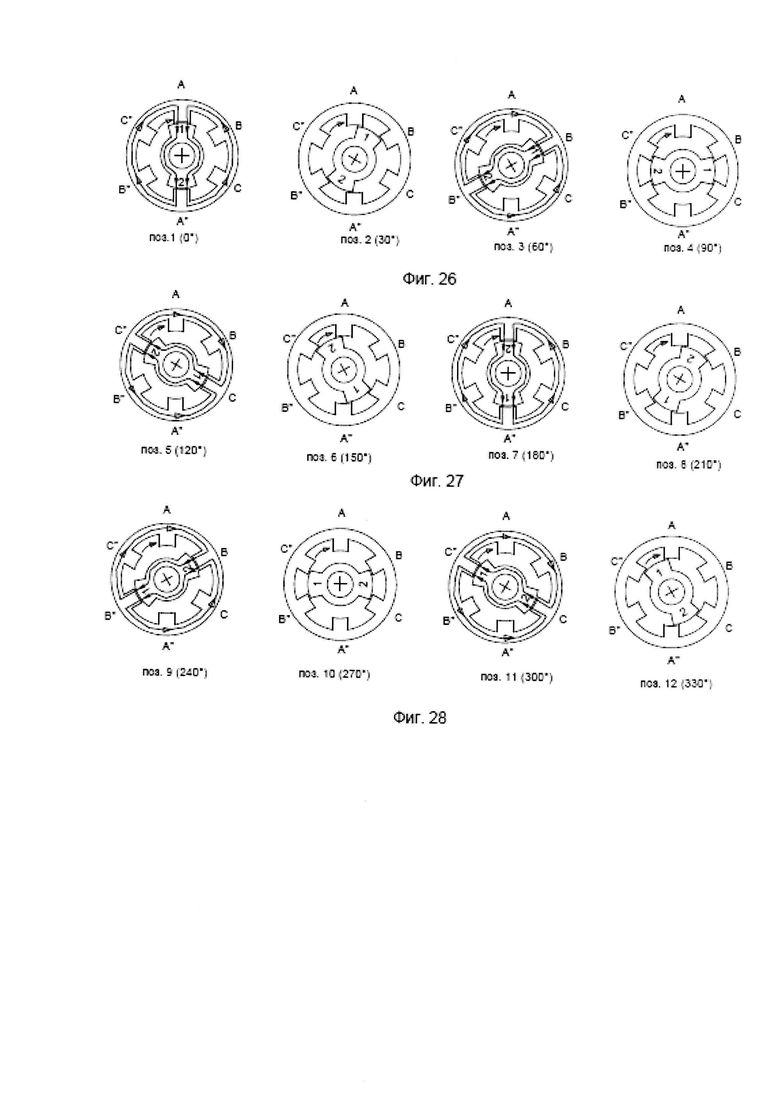
На фиг. 26 - фиг. 28 представлены положения ротора вентильно-индукторной машины Z1/Z2=6/2 в начальной позиции (поз. 1, 0°) и затем при его повороте на 30° (поз. 2, 30°), 60° (поз. 3, 60°), 90° (поз. 4, 90°) и так далее до поз. 12, 330° для традиционного способа управления, описанного в [1, 2, 3].
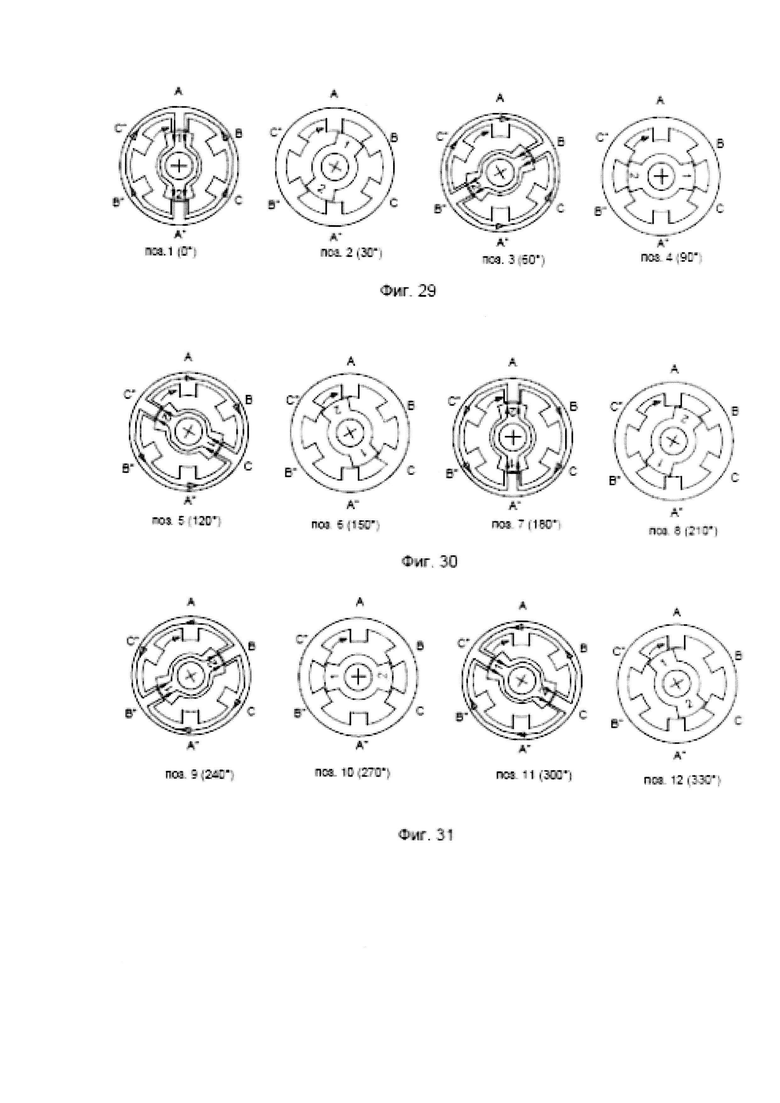
На фиг. 29 - фиг. 31 представлены положения ротора вентильно-индукторной машины Z1/Z2=6/2 в начальной позиции (поз. 1, 0°) и затем при его повороте на 30° (поз. 2, 30°), 60° (поз. 3, 60°), 90° (поз. 4, 90°) и так далее до поз. 12, 330° для предлагаемого способа управления.
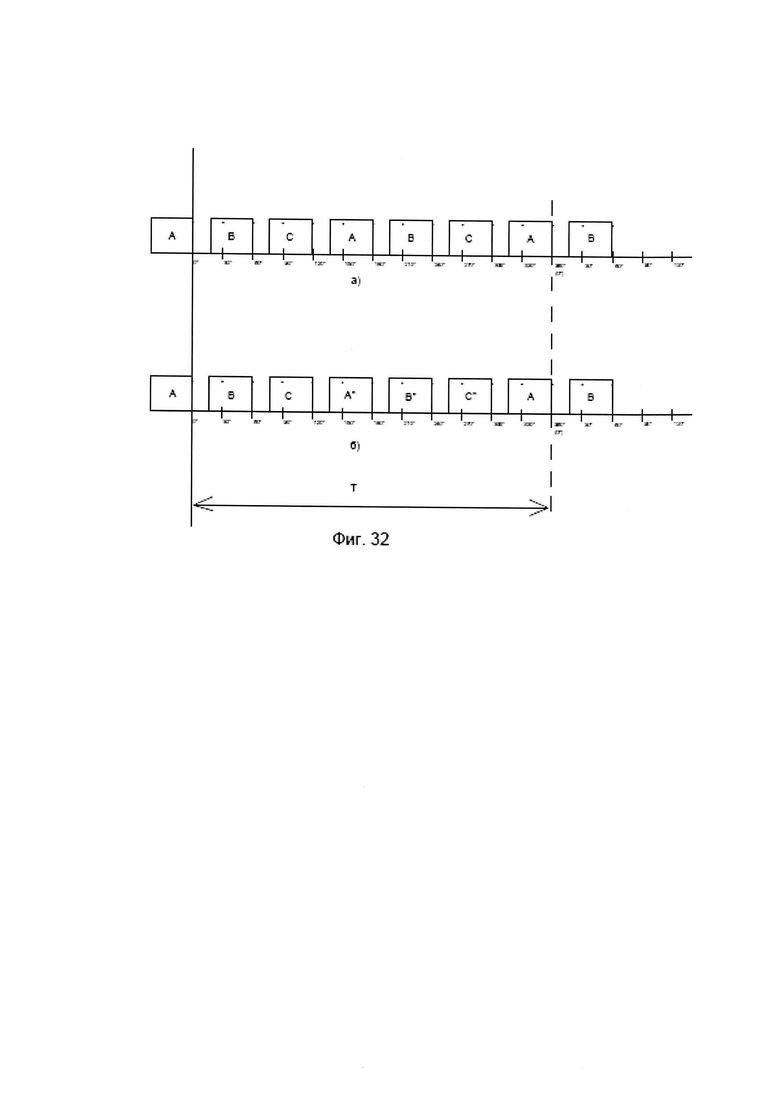
На фиг. 32а условно показаны сигналы от датчика положения ротора, обеспечивающие переключение транзисторов в схеме на фиг. 4а. вентильно-индукторной машины Z1/Z2=6/2.
На фиг. 32б условно показаны сигналы, обеспечивающие переключение транзисторов в схеме на фиг. 4в вентильно-индукторной машины Z1/Z2=6/2.
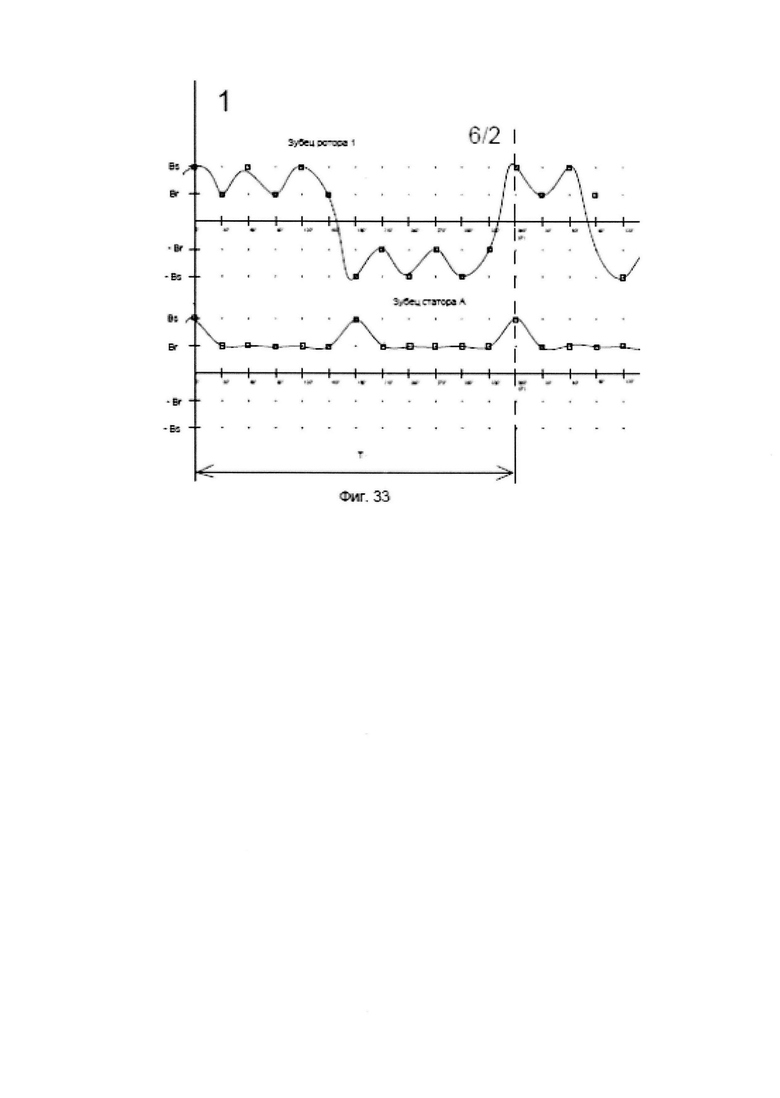
На фиг. 33 показан характер изменения индукции в зубцах ротора и зубцах статора машины Z1/Z2=6/2 при управлении по способу, описанному в [1, 2, 3].
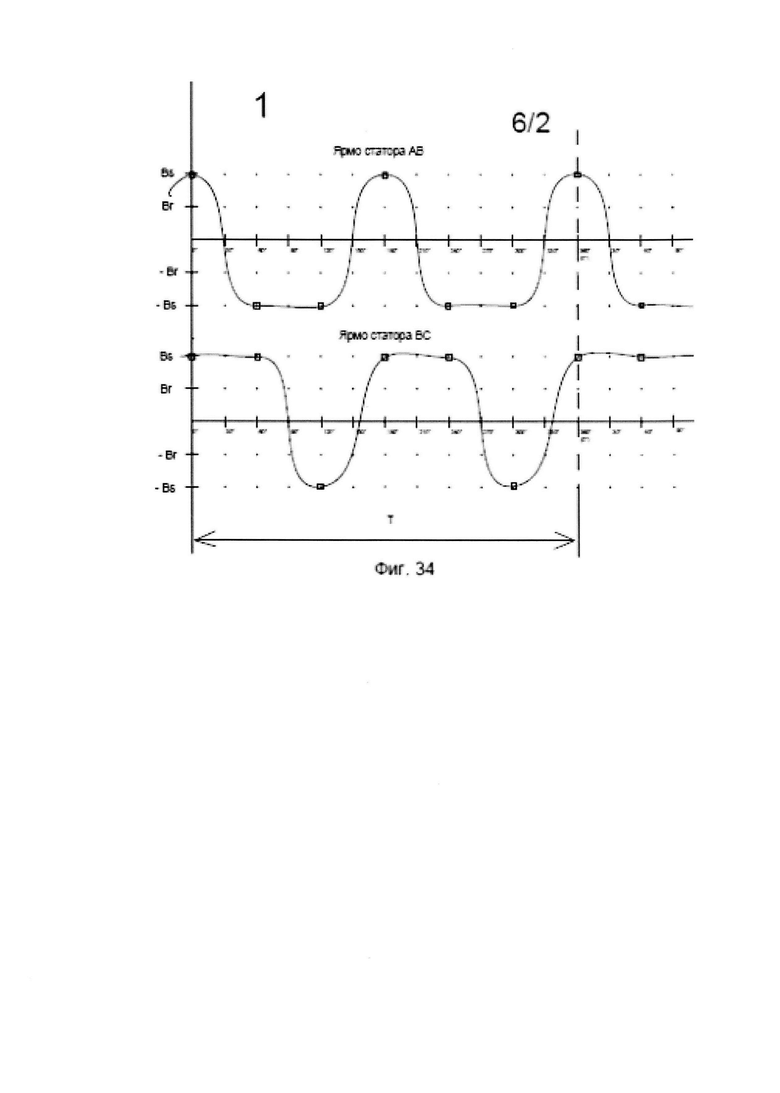
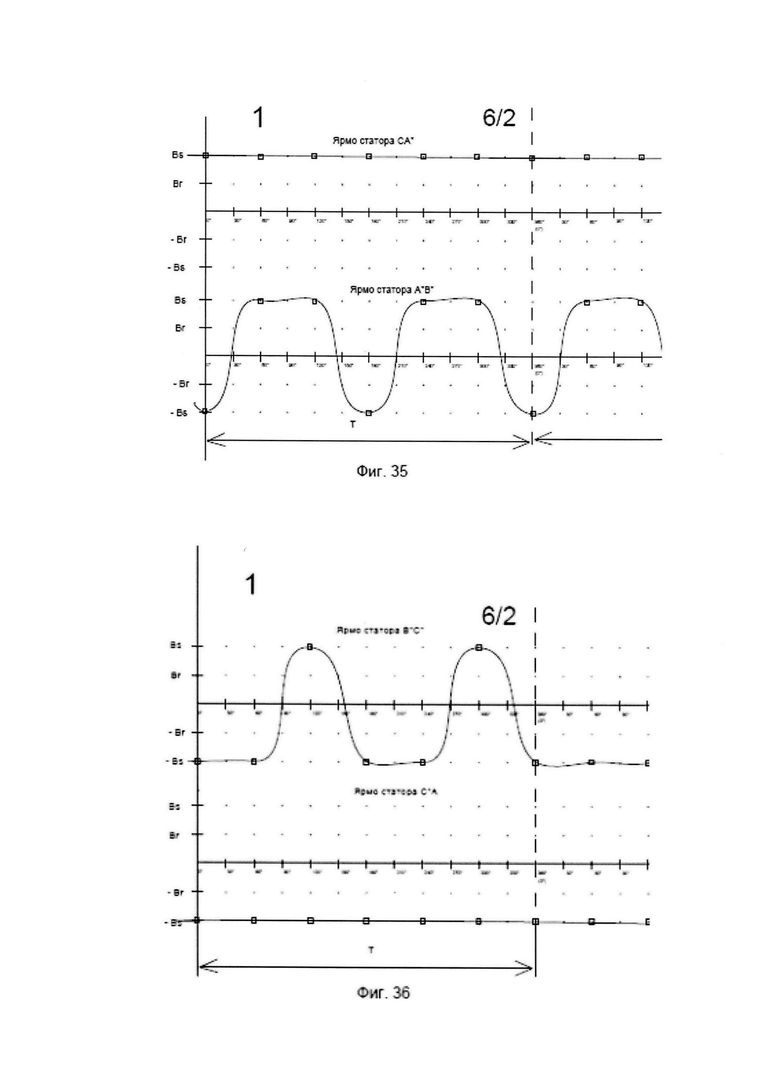
На фиг. 34 - фиг. 36 показан характер изменения индукции в шести частях ярма статора машины Z1/Z2=6/2 при управлении по способу, описанному в [1, 2, 3].
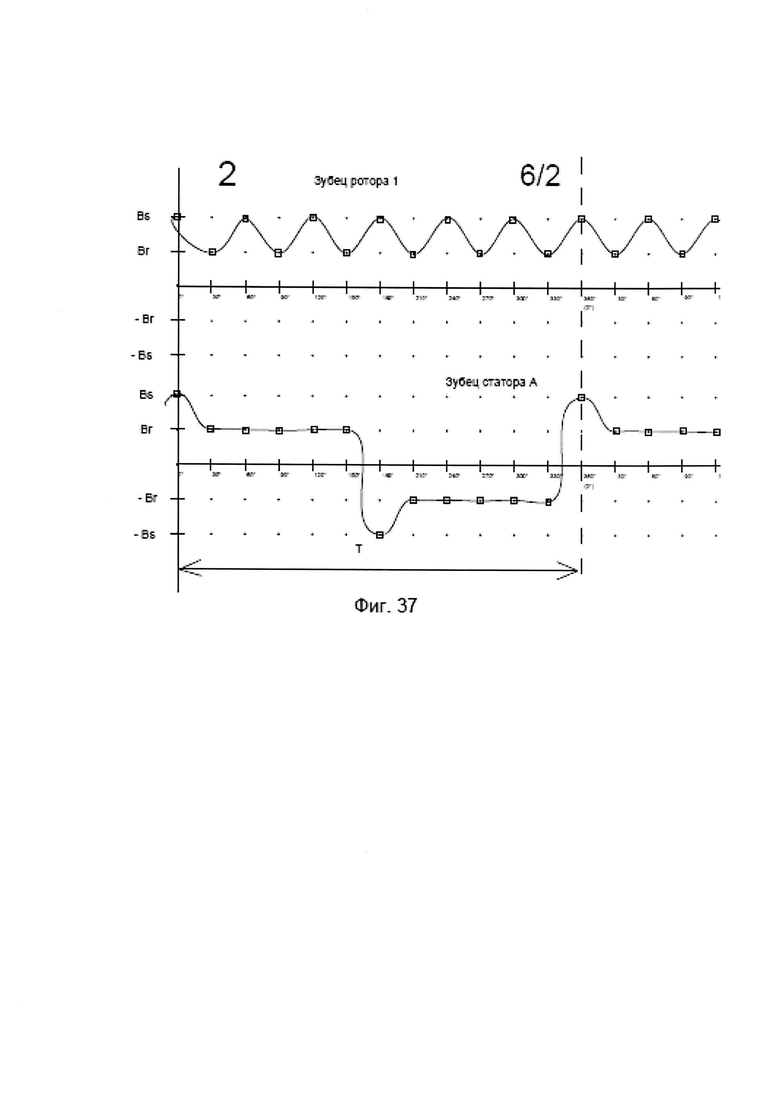
На фиг. 37 показан характер изменения индукции в зубцах ротора и зубцах статора машины Z1/Z2=6/2 при управлении по предлагаемому способу.
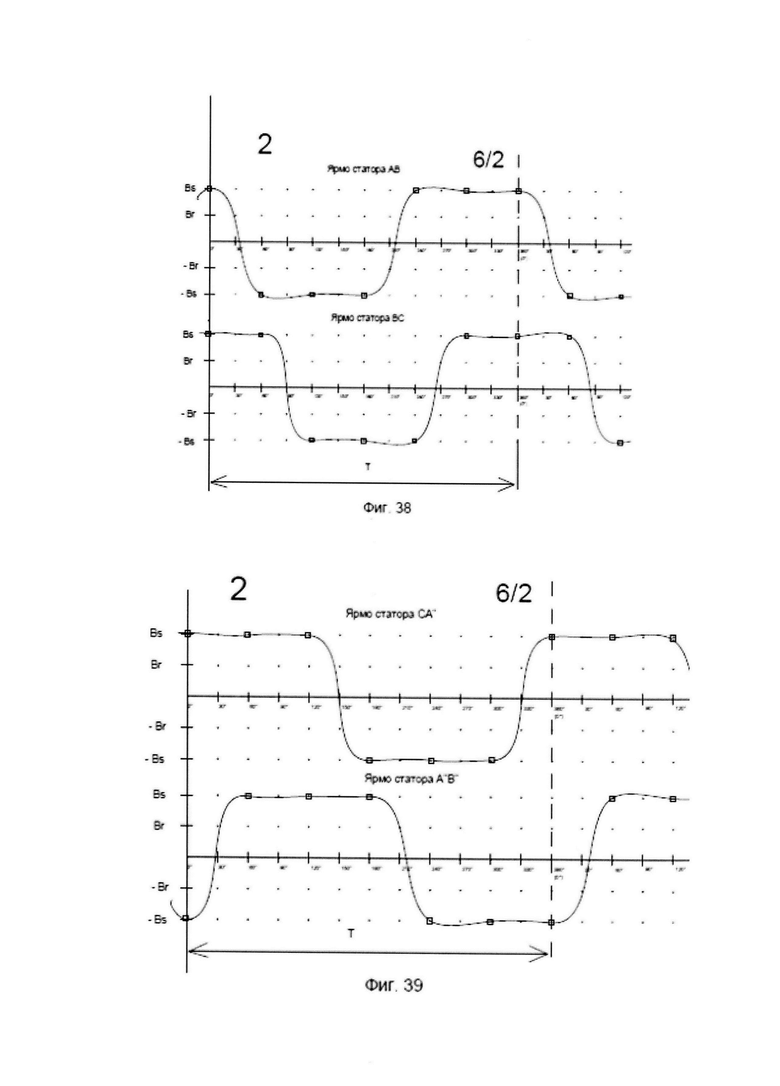
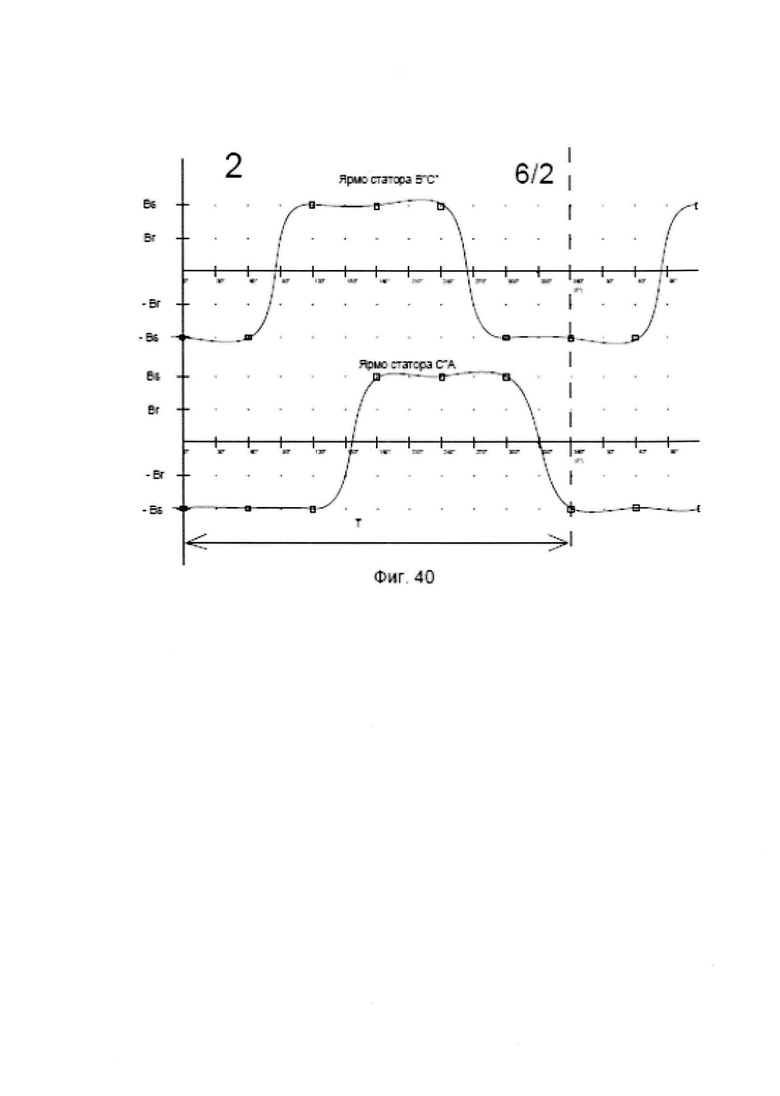
На фиг. 38 - фиг. 40 показан характер изменения индукции в шести частях ярма статора машины Z1/Z2=6/2 при управлении по предлагаемому способу.
5. Ниже представлены пояснения работы предложенного способа управления высокооборотной индукторной электрической машиной.
На фиг. 1 представлен традиционный вид трехфазной вентильно-индукторной машины 1, имеющей 6 зубцов (Z1=6) на статоре 2 и 4 зубца (Z2=4) на роторе 3 (Z1/Z2=6/4) и преобразователя 4, обеспечивающего протекание тока по фазным обмоткам машины. В машине представленного типа обмотка каждой фазы состоит из двух катушек (полуфаз), размещенных на диаметрально расположенных зубцах статора 2. На фиг 1 условно, в виде витка провода, показаны две полуфазы фазы А. Верхняя (на рисунке) полуфаза 5, обозначена буквой А, нижняя полуфаза 6, обозначена символом А''. Полуфазы остальных фаз (В и С), выполнены аналогично и имеют аналогичные обозначения В и В'', С и С''. (На фиг. 1 обмотки фаз В и С не показаны). Линии магнитного потока (индукции), созданного токами в обмотках полуфаз А и А'' обозначены цифрой 7. Принято традиционное обозначение направления токов в обмотке (витке): «крестик» (+) - ток идет за плоскость рисунка, «точка» - ток идет в противоположном направлении. Обмотки всех полуфаз выполняются одинаковыми, с одинаковым направлением намотки провода, поэтому, чтобы обеспечить согласованное направление магнитного потока, обмотки полуфаз соединяют таким образом: конец полуфазы А соединяют с концом полуфазы А'' (на фиг. 1 начала полуфаз А и А'' обозначены жирной точкой). На фиг. 1 ток, протекающий по фазе А, обозначен цифрой 8. Управление переключениями транзисторов VS1…VS6 преобразователя 4 осуществляет система управления 9, получающая сигналы о положении ротора от датчика положения ротора (не показан на фиг. 1).
При управлении машиной по способу, описанному в [1, 2, 3] ток в фазах всегда протекает в одном направлении, например, в фазе А он возникает при открывании (включении) транзисторов VS1 и VS2, а при их выключении протекает в источник питания (конденсатор 10) через диоды VD1 и VD2. Таким образом происходит однополярное намагничивание зубцов статора.
В вентильно-индукторных машинах, работающих с однополярным намагничиванием зубцов статора, индукция в зубцах статора пульсирует - изменяется от максимального значения Bs (saturation), когда ток в фазе максимален, до значения остаточной индукции Br (residual), когда ток в фазе равен нулю и обратно до Bs. Для обычно применяемых марок стали Br может составлять (0,5…0,7) Bs (см. фиг. 2 и фиг. 3).
Известно, что потери в стали в электрических машинах складываются из потерь на перемагничивание (гистерезис) и потерь от вихревых токов. Эти потери возрастают с возрастанием частоты перемагничивания и величиной перепада индукции (ΔВ) при перемагничивании. При однополярном намагничивании зубцов статора потери в стали в них сравнительно невелики вследствие небольшого изменения (перепада) индукции:
ΔВ=Bs-Br=(0,3…0,5) Bs.
Однако индукция в роторе при этом изменяется от Bs до -Bs (полное перемагничивание) и изменение индукции:
ΔB=Bs-(-Bs)=2Bs.
В ряде случаев потери в стали ротора настолько велики, что приходится применять жидкостное охлаждение ротора по спиральным канавкам вала, что чрезвычайно дорого и сильно усложняет (и удорожает, при снижении надежности) конструкцию вала, пакета ротора и подшипниковых узлов.
Задача, на решение которой направлено заявляемое техническое решение, заключается в том, чтобы исключить полное перемагничивание зубцов (а в ряде случаев и ярма) ротора, заменив его частичным размагничиванием-намагничиванием и тем самым уменьшить потери в стали ротора и нагрев ротора от этих потерь.
Для реализации предлагаемого способа управления высокооборотной вентильно-индукторной электрической машиной схема традиционного преобразователя (см. фиг. 1), представленного на фиг. 4а несколько изменяется, а именно: диоды VD1…VD6 заменяются транзисторами, в результате чего схема преобразователя приобретает вид, представленный на фиг. 4б.
Нетрудно заметить, что на фиг. 4в изображена та же (что и на фиг. 4б) схема в более понятном представлении. Следует отметить, что наличие двух трехфазных мостов не усложняет, а напротив, упрощает и удешевляет преобразователь, т.к. «…силовые транзисторные модули, которые применяются для инверторов на полумостовых схемах, имеют более высокую цену по сравнению с силовыми транзисторными модулями, применяемыми в традиционных мостовых схемах инверторов, за счет большего на один числа выводов. Кроме того, для реализации инверторов на полумостовых схемах необходимы два типа модулей (модуль, в котором коллектор транзистора соединен с анодом диода, и модуль, в котором коллектор транзистора соединен с катодом диода), что увеличивает номенклатуру комплектующих изделий» [6].
Отличия предлагаемого способа управления высокооборотной индукторной электрической машиной от традиционного поясняются при помощи фиг. 5…фиг. 12, на которых представлены положения ротора в начальной позиции (поз. 1, 0°) и затем при его повороте на 30° (поз. 2, 30°), 60° (поз. 3, 60°), 90° (поз. 4, 90°) и так далее до поз. 12, 330°, а также для каждого положения ротора изображены пути прохождения магнитного потока по зубцам и ярмам машины и направление тока в фазах машины.
В качестве примера взята машина с Z1/Z2=6/4.
Фиг. 5…фиг. 8 отражают состояния при традиционном способе управления (однополярное намагничивание зубцов статора), а фиг. 9…фиг. 12 отражают состояния при предлагаемом способе управления (разнополярное намагничивание зубцов статора). Переключения фазных обмоток осуществляются в порядке следования фаз по расточке машины (по часовой стрелке): А, В, С по сигналам от датчика положения ротора.
Из рассмотрения фиг. 5…фиг. 8 следует, что при однополярном намагничивании зубцов статора (и переключениях фазных обмоток в порядке А, В, С) всегда «+» источника питания прикладывается к началу полуфаз А (включен VS1), В (включен VS3) и С (включен VS5), а «-» источника питания - к началу полуфаз А'' (включен VS2), В'' (включен VS4) и С'' (включен VS6), т.е. ток по обмоткам фаз А, В и С всегда проходит в неизменном направлении: от начала полуфаз А, В и С к началам полуфаз А'', В'' и С''. За один оборот ротора порядок переключения, т.е. подачи «+» источника питания к началам полуфаз, такой: А, В, С, А, В, С, А, В, С, А, В, С. На фиг. 13а условно показаны сигналы от датчика положения ротора, обеспечивающие соответствующее переключение транзисторов в схеме на фиг. 4а. При этом магнитный поток в зубцах статора, изменяясь по величине, не изменяет направления (зубцы статора не перемагничиваются).
В то же время, например, в зубце 1 ротора при переходе от поз. 1 (0°) к поз. 3 (60°) направление магнитного потока изменяется на противоположное и затем при переходе от поз. 7 (180°) к поз. 9 (240°) направление магнитного потока вновь изменяется на противоположное. Таким образом, за один поворот ротора происходит полное перемагничивание зубца 1. То же происходит с другими зубцами (2, 3, 4) ротора.
При предлагаемом способе управления (разнополярное намагничивание зубцов статора) (см. фиг. 9…фиг. 12) порядок переключения, т.е. подачи «+» источника питания к началам полуфаз (за один оборот ротора), изменяется таким образом: А, В, С'', А, В'', С'', А'', В'', С, А'', В, С. На фиг. 13б условно показаны сигналы, обеспечивающие соответствующее переключение транзисторов в схеме на фиг. 4в. Выработка сигналов, реализующих указанную последовательность переключений, может быть получена одним из нескольких простых способов. Это может быть или изменение конструкции датчика положения ротора или же аппаратное или программное дополнение к традиционному датчику положения ротора, задача которого обеспечить получение подобной последовательности сигналов с интервалом 30° и затем подачу сигналов на транзисторы правого моста (см. фиг. 4в) при сигналах А, В, С, или же подачу сигналов на транзисторы левого моста (см. фиг. 4в) при сигналах А'', В'', С''.
На фиг. 9…фиг. 12 представлены положения ротора с интервалом в 30°, пути прохождения магнитного потока по зубцам и ярмам машины и мгновенные схемы, показывающие состояния транзисторов и направление тока в фазах машины при разнополярном намагничивании зубцов статора. Как видно из фиг. 9…фиг. 12, магнитный поток в зубцах ротора (за один оборот ротора) не изменяет направления, в то же время зубцы статора испытывают полное перемагничивание.
6. Оценка эффективности предлагаемого способа управления высокооборотной индукторной электрической машиной.
Цель заявляемого технического решения, заключается в том, чтобы уменьшить потери в стали ротора (и нагрев ротора) за счет исключения полного перемагничивания зубцов (а в ряде случаев и ярма) ротора, заменив его частичным размагничиванием-намагничиванием. Уменьшение потерь в стали ротора сопровождается возрастанием потерь в стали статора, что является неизбежной «платой» за достижение эффекта на роторе.
Целесообразно поэтому сделать оценку величины потерь в стали как ротора, так и статора при традиционном и предлагаемом способе управления высокооборотной индукторной электрической машиной.
Как отмечено в [5] (с. 116), «Точный расчет Рг (потерь на гистерезис) и Рвт (потерь на вихревые токи) практически невозможен». Там же приведена приближенная формула (4-44) для расчета суммарных потерь в стали Рст.осн⋅(Рст.осн.=Рг+Рвт), применяемая для расчета асинхронных и синхронных электрических машин традиционного исполнения.

где: kдi и β - коэффициенты, специфичные для конкретных типов машин,
f - частота перемагничивания, Гц,
p1,0/50 - удельные потери в стали (Вт/кг) при частоте перемагничивания 50 Гц и магнитной индукции 1 Тл,
Bi - индукция в соответствующей части машины (Тл),
mi - масса соответствующей части машины (кг).
Формула (1) относится к случаю полного перемагничивания ферромагнитных частей машины (от +Bi до -Bi), т.е. к изменению индукции ΔВ=Bi-(-Bi)=2Bi.
В вентильно-индукторных машинах, работающих с однополярным намагничиванием зубцов статора, индукция в зубцах статора пульсирует.
Пульсационные потери для традиционных типов машин с зубчатостью как на статоре, так и на роторе в [5] (с. 117) рекомендуется рассчитывать по следующим приближенным формулам (4-46):


где: Z1 и Z2 - числа зубцов статора и ротора,
Впул - амплитуда пульсаций индукции,
mz1 и mz2 - масса зубцов статора и ротора.
Хотя вентильно-индукторные машины относятся к синхронным машинам, электромагнитные процессы в них отличаются своеобразием, вследствие чего использование формул (1), (2), (3) для расчета потерь в стали в том виде, как это представлено в [5] представляется не обоснованным.
Тем не менее сравнение потерь в стали при управлении по способу, описанному в [1, 2, 3] и при управлении по предлагаемому в настоящем техническом предложении способу может быть проведено в относительных единицах, т.к. отличие предложенного способа и способа-аналога заключается только в характере изменения магнитной индукции при равенстве прочих параметров, входящих в формулы (1), (2), (3), поскольку прочие физические показатели электрической машины (кроме индукции) при изменении способа управления не изменяются.
В данном случае целесообразно оценить потери аналогично тому, как это делается при определении потерь в полупроводниках. Например, потери в транзисторах определяются за цикл включение-проводимость-отключение. Затем эти потери умножают на число циклов за определенный период времени, что дает полные потери за этот период. В нашем случае можно в целях сравнения оценивать потери в стали как сумму потерь на перемагничивание (полное или частичное) за период, соответствующий времени, затрачиваемому ротором на один оборот.
Иными словами потери в стали можно сопоставлять, используя соотношение:

где: Рст.ц = величина потерь в стали за один цикл полного или частичного перемагничивания
С - константа, обобщающая влияние на потери в стали значений всех параметров электрической машины кроме магнитной индукции,
ΔВ - изменение магнитной индукции за один цикл полного или частичного перемагничивания;
Для упрощения анализа примем, что значение индукции во всех магнитопроводящих частях машины (зубцах статора и ротора и ярмах статора и ротора) одинаково и его максимальное значение равно Bs.
Примем для определенности 
При частичном перемагничивании от Br=0,5Bs до Bs и обратно изменение индукции равно ΔВ=0,5Bs; при полном перемагничивании ΔВ=Bs-(-Bs)=2Bs.
Таким образом, при частичном перемагничивании:
Рст.ц.част.=С×(0,5Bs)2=С×0,25×(Bs)2
При полном перемагничивании:
Рст.ц.полн.=С×(2Bs)2=С×4×(Bs)2
Откуда следует, что 
6.1. Сравнение потерь в стали при однополярном и при разнополярном намагничивании зубцов статора для машины Z1/Z2=6/4.
На основе рассмотрения фиг. 5…фиг. 8 определен характер изменения индукции в зубцах ротора и зубцах статора (см. фиг. 14) и характер изменения индукции в шести частях ярма статора (см. фиг. 15, фиг. 16 и фиг. 17) и четырех частях ярма ротора (см. фиг. 18 и фиг. 19) при управлении по способу, описанному в [1, 2, 3] (однополярное намагничивание зубцов статора, способ 1).
Аналогично, на основе рассмотрения фиг. 9…фиг. 12 определен характер изменения индукции в зубцах ротора и зубцах статора (см. фиг. 20) и характер изменения индукции в шести частях ярма статора (см. фиг. 21, фиг. 22 и фиг. 23) и четырех частях ярма ротора (см. фиг. 24 и фиг. 25) при управлении по предлагаемому способу управления (разнополярное намагничивание зубцов статора, способ 2).
Это представление носит качественный характер и построено следующим образом:
- с целью упрощения построения принято Br=0,5Bs,
- на график нанесены (отмечены квадратами) значения индукции в зубцах и ярмах для углов поворота ротора 0°, 30°, 60°, …360° (один период вращения ротора).
А. Управление по способу, описанному в [1, 2, 3] (однополярное намагничивание зубцов статора).
Потери в зубцах ротора и статора
Как видно из фиг. 14, при однополярном намагничивании зубцов статора каждый из четырех зубцов ротора за один оборот ротора (за время Т) перемагничивается однократно полностью: от Bs до (-Bs) в интервале 0°…60° и затем от (-Bs) до Bs в интервале 180°…240° и четырежды перемагничивается частично: дважды от (-Bs) до (-Br) и обратно в интервале 60°…180° и дважды от Bs до Br и обратно в интервале 240°…360°.
Суммарные потери в четырех зубцах ротора за один оборот ротора с учетом соотношения (6) составят:

Из фиг. 14 видно, что каждый из шести зубцов статора четырежды частично перемагничивается за один оборот ротора и общие потери в них:

Суммарные потери в зубцах статора и ротора составляют:

Потери в ярме статора (см. фиг. 15, 16, 17)
- четыре из шести частей ярма статора АВ, ВС, А''В'' и В''С'' перемагничиваются четыре раза полностью: от Bs до (-Bs);
- две из шести частей ярма статора СА'' и С''А не перемагничиваются
Всего потерь в ярме статора за один оборот ротора:

Потери в ярме ротора (см. фиг. 18, 19)
- все четыре части ярма ротора перемагничиваются три раза полностью: от Bs до (-Bs);
Всего потерь в ярме ротора:

Итого потерь в ярмах статора и ротора:

Всего потерь в стали статора и ротора при однополярном намагничивании зубцов статора:

При этом потери в роторе:

Потери в статоре:

Б. Управление по предлагаемому в настоящем техническом предложении способу (разнополярное намагничивание зубцов статора).
Потери в зубцах ротора и статора
При разнополярном намагничивании зубцов статора (см. фиг. 20) зубцы ротора за один оборот ротора (за время Т) перемагничиваются частично 6 раз. Суммарные потери в зубцах ротора за один оборот ротора составят:

Из фиг. 20 видно, что зубцы статора за один оборот ротора перемагничиваются однократно полностью: от Bs до (-Bs) в интервале 90°…180° и затем от (-Bs) до Bs в интервале 270°…360° и дважды перемагничиваются частично: однократно от Bs до Br и обратно в интервале 0°…90° и однократно от (-Bs) до (-Br) и обратно в интервале 180°…270°.
Суммарные потери во всех шести зубцах статора за один оборот ротора с учетом соотношения (6) составят:

Суммарные потери в зубцах статора и ротора составят:

Потери в ярме статора (см. фиг. 21, 22, 23)
- все шесть частей ярма статора перемагничиваются три раза полностью: от Bs до (-Bs);
Всего потерь в ярме статора:

Потери в ярме ротора (см. фиг. 24, 25)
- две части ярма ротора 1-2 и 3-4 перемагничиваются шесть раз полностью: от Bs до (-Bs);
- две части ярма ротора 2-3 и 4-1 не перемагничиваются
Всего потерь в ярме ротора:

Итого потерь в ярмах статора и ротора:

Всего потерь в стали статора и ротора при разнополярном намагничивании зубцов статора:

При этом потери в роторе:

Потери в статоре:

Из сопоставления полученных результатов для машины 6/4 следует (см. соотношения 13, 14, 15, 22, 23, 24), что при разнополярном намагничивании зубцов статора:
- потери в стали ротора уменьшаются на:
ΣРрот1-ΣРрот2=128-72=56, или на 56/128=0,44, т.е. на 44%;
- потери в стали статора возрастают на:
ΣРстат2-ΣPстат1=156-66,7=89,3 или на 89,3/66,7=1,34, т.е. на 134%;
- общие потери в стали (статора и ротора) возрастают на:
(ΣРзуб2+ΣРярм2)-(ΣРзуб1+ΣРярм1)=228-194,7=33,3 или на 33,3/194,7=0,17, т.е. на 17%.
В высокооборотных машинах потери в стали составляют около 50%, следовательно, их увеличение на 17% скажется в уменьшении общего КПД машины примерно на 8%. Такова «плата» за значительное уменьшение потерь в роторе.
Величина потерь в роторе, а следовательно и тепловыделение в нем, существенно влияют на температуру ротора и подшипниковых узлов.
Тепловое расширение элементов ротора уменьшает величину рабочего воздушного зазора между ротором и статором, что сказывается на характеристиках машины и эффективности охлаждения. Тепловое удлинение вала ротора влияет на долговечность подшипников или же требует применения термокомпенсирующих устройств. Тепловое расширение пакета ротора может приводить к ослаблению посадки на вал.
В высокооборотных электрических машинах ресурс работы подшипников должен быть значительным и предсказуемым. Значительный перегрев подшипниковой зоны ухудшает как условия работы самих подшипников (например, из-за уменьшения рабочих зазоров), так и температурный режим смазочных материалов, чрезвычайно чувствительных к перегреву.
Охлаждение поверхности ротора продуваемым воздухом позволяет отвести ограниченную мощность тепловых потерь. Существующие же способы охлаждения ротора жидкостью по спиральным канавкам вала чрезвычайно дороги и сильно усложняют (и удорожают, при снижении надежности) конструкцию вала, пакета ротора и подшипниковых узлов. Особенно это относится к высокооборотным электрическим машинам.
Именно поэтому уменьшение потерь в роторе на 44% чрезвычайно важно. Что касается возросших потерь в статоре, то они могут быть эффективно отведены при помощи жидкостного охлаждения, например, по каналам в ярме статора, каналам в корпусе машины и за счет внешнего охлаждения корпуса, что не вызывает конструктивных сложностей.
В улучшении условий работы (температурного режима) ротора и связанных с ним конструктивных элементов, в обеспечении возможности исключения сложных, дорогостоящих и ненадежных способов жидкостного охлаждения ротора, заключается, по нашему мнению, положительный технический эффект заявляемого технического предложения.
6.2. Сравнение потерь в стали при однополярном и при разнополярном намагничивании зубцов статора для машины Z1/Z2=6/2.
Подобно тому, как это приведено выше для машины с Z1/Z2=6/4, отличия предлагаемого способа управления высокооборотной индукторной электрической машиной от традиционного поясняются при помощи фиг. 26…фиг. 28, а также фиг. 29…фиг. 31, на которых представлены положения ротора в начальной позиции (поз. 1, 0°) и затем при его повороте на 30° (поз. 2, 30°), 60° (поз. 3, 60°), 90° (поз. 4, 90°) и так далее до поз. 12, 330°, а также для каждого положения ротора изображены пути прохождения магнитного потока по зубцам и ярмам машины. Рассуждения, относительно преобразователя (см. фиг. 4), приведенные для машины с Z1/Z2=6/4, справедливы и для машины с Z1/Z2=6/2. Мгновенные схемы, показывающие состояния транзисторов преобразователя и направление тока в фазах машины аналогичны таковым, приведенным для машины с Z1/Z2=6/4, и на фиг. 26…фиг. 28, а также на фиг. 29…фиг. 31 не показаны.
Все особенности, отличающие предлагаемый способ управления от традиционного, изложенные для машины с Z1/Z2=6/4, характерны и для машины с Z1/Z2=6/2. С целью сокращения объема документа они здесь не приведены.
При однополярном намагничивании зубцов статора порядок переключения полуфаз за один оборот ротора, такой: А, В, С, А, В, С. На фиг. 32а условно показаны сигналы от датчика положения ротора, обеспечивающие соответствующее переключение транзисторов в схеме на фиг. 4а. При этом, как следует из рассмотрения фиг. 26…фиг. 28, магнитный поток в зубцах статора, изменяясь по величине, не изменяет направления (зубцы статора не перемагничиваются), а оба зубца ротора перемагничиваются.
При предлагаемом способе управления (разнополярное намагничивание зубцов статора) порядок переключения полуфаз (за один оборот ротора), изменяется таким образом: А, В, С, А'', В'', С''. Как и для машины с Z1/Z2=6/4, сигналы А, В, С управляют работой транзисторов правого моста (см. фиг. 4в), а сигналы А'', В'', С'' управляют работой транзисторов левого моста (см. фиг. 4в). Как видно из фиг. 29…фиг. 31, магнитный поток в зубцах ротора (за один оборот ротора) не изменяет направления, в то же время зубцы статора испытывают полное перемагничивание.
На основе рассмотрения фиг. 26…фиг. 28 определен характер изменения индукции в зубцах ротора и зубцах статора (см. фиг. 33) и характер изменения индукции в шести частях ярма статора (см. фиг. 34, фиг. 35 и фиг. 36) при управлении по способу, описанному в [1, 2, 3] (однополярное намагничивание зубцов статора, способ 1).
Аналогично, на основе рассмотрения фиг. 29…фиг. 31 определен характер изменения индукции в зубцах ротора и зубцах статора (см. фиг. 37) и характер изменения индукции в шести частях ярма статора (см. фиг. 38, фиг. 39 и фиг. 40) при управлении по предлагаемому способу управления (разнополярное намагничивание зубцов статора, способ 2).
В машине с двумя зубцами ротора зубцы и части ярма ротора перемагничиваются одинаково.
А. Однополярное намагничивание зубцов статора.
Потери в зубцах ротора и статора
Как видно из фиг. 33 при однополярном намагничивании зубцов статора за один оборот ротора (за время Т) каждый из двух зубцов ротора перемагничивается однократно полностью: от Bs до (-Bs) в интервале 0°…60° и затем от (-Bs) до Bs в интервале 180°…240° и четырежды перемагничивается частично: дважды от (-Bs) до (-Br) и обратно в интервале 60°…180° и дважды от Bs до Br и обратно в интервале 240°…360°.
Суммарные потери в двух зубцах ротора за один оборот ротора с учетом соотношения (6) составят:

Из фиг. 33 видно, что каждый из шести зубцов статора за один оборот ротора перемагничивается дважды частично: от Bs до Br и общие потери в них:

Суммарные потери в зубцах статора и ротора составляют:

Потери в ярме статора (см. фиг. 34, 35, 36)
- четыре из шести частей ярма статора АВ, ВС, А''В'' и В''С'' перемагничиваются два раза полностью: от Bs до (-Bs);
- две из шести частей ярма статора СА'' и С''А не перемагничиваются.
Всего потерь в ярме статора за один оборот ротора:

Потери в ярме ротора
- за один оборот ротора каждая из двух частей ярма ротора перемагничивается так же, как каждый из двух зубцов ротора, т.е. однократно полностью от Bs до (-Bs) и четырежды перемагничивается частично.
Всего потерь в ярме ротора:

Итого потерь в ярмах статора и ротора:

Всего потерь в стали статора и ротора при однополярном намагничивании зубцов статора:

При этом потери в роторе:

Потери в статоре:

Б. Разнополярное намагничивание зубцов статора.
Потери в зубцах ротора и статора
При разнополярном намагничивании зубцов статора (см. фиг. 37) за один оборот ротора (за время Т) зубцы ротора перемагничиваются частично 6 раз. Суммарные потери в двух зубцах ротора за один оборот ротора составят:

Из фиг. 37 видно, что зубцы статора за один оборот ротора перемагничиваются однократно полностью: от Bs до (-Bs).
Суммарные потери во всех шести зубцах статора за один оборот ротора с учетом соотношения (6) составят:

Суммарные потери в зубцах статора и ротора составят:

Потери в ярме статора (см. фиг. 38, 39, 40)
- все шесть частей ярма статора перемагничиваются однократно полностью: от Bs до (-Bs);
Всего потерь в ярме статора:

Потери в ярме ротора
- две части ярма ротора перемагничиваются, как и зубцы ротора, шесть раз частично;
Всего потерь в ярме ротора:

Итого потерь в ярмах статора и ротора:

Всего потерь в стали статора и ротора при разнополярном намагничивании зубцов статора:

При этом потери в роторе:

Потери в статоре:

Из сопоставления полученных результатов для машины 6/2 следует (см. соотношения 31, 32, 33, 40, 41, 42), что при разнополярном намагничивании зубцов статора:
- потери в стали ротора уменьшаются на:
ΣРpот1-ЕРрот2=80-24=56, или на 56/80=0,7, т.е. на 70%;
- потери в стали статора возрастают на:
ΣРстат2-ЕРстат1=112-33,3=78,7, или на 78,7/33,3=2,36, т.е. на 236%;
- общие потери в стали (статора и ротора) возрастают на:
(ΣРзуб2+ΣРярм2)-(ΣРзуб1+ΣРярм1)=136-113,3=22,7 или на 22,7/113,3=0,2, т.е. на 20%.
В высокооборотных машинах потери в стали составляют около 50%, следовательно, их увеличение на 20% скажется в уменьшении общего КПД машины примерно на 10%.
6.3. Подводя итог выполненным оценочным расчетам, следует отметить следующее.
6.3.1. С целью упрощения расчетов было принято, что значение индукции во всех магнитопроводящих частях машины (зубцах статора и ротора и ярмах статора и ротора) одинаково и его максимальное значение равно Bs. При этом допущении получается, что при применении предлагаемого способа разнополярного намагничивания зубцов статора существенное снижение потерь в стали ротора сопровождается еще более значительным возрастанием потерь в стали статора и суммарных потерь в стали машины.
Реальное распределение индукции в высокооборотных вентильно-индукторных машинах, как правило, иное. Диаметр ротора жестко ограничен в связи с требованиями механической прочности (ограничение по величине окружной скорости), ограничены также размеры спинки ротора. Поэтому значение плотности магнитного потока (индукции) в зубцах и спинке ротора максимальное (Bs). В то же время размеры зубцов и, особенно, спинки статора (ярма статора) не имеют таких жестких ограничений, в связи с чем значение индукции в них может быть принято существенно меньше, чем Bs. В результате потери в стали статора окажутся хотя и значительными, но все же заметно меньше, чем это получено в вышеприведенных оценках.
6.3.2. Можно констатировать, что предлагаемый способ разнополярного намагничивания зубцов статора решает сравнительно узкую техническую задачу - улучшить условия работы (температурный режим) ротора и связанных с ним конструктивных элементов (в первую очередь подшипниковых узлов) высокооборотных вентильно-индукторных машин; обеспечить возможность исключения сложных, дорогостоящих и ненадежных способов жидкостного охлаждения ротора.
Это достигается ценой увеличения потерь в стали статора (и снижении общего КПД электрической машины).
Применение предлагаемого способа, таким образом, ограничено такими техническими решениями (с использованием высокооборотных вентильно-индукторных машин), где на первый план выступает надежность работы и долговременный ресурс электрической машины без использования специальных мер по охлаждению подшипниковых опор.
7. Таким образом, при реализации предложенного технического решения - способа разнополярного намагничивания зубцов статора решаются поставленные задачи:
- исключается полное перемагничивание зубцов (а в ряде случаев и ярма) ротора, которое заменяется частичным размагничиванием-намагничиванием;
- уменьшаются потери в стали ротора и нагрев ротора от этих потерь.
8. Исходя из вышеизложенного задача достижения заявленного технического результата, заключающегося в том, что:
- улучшаются условия работы (температурного режима) ротора и связанных с ним конструктивных элементов;
- обеспечивается возможность исключения сложных, дорогостоящих и ненадежных способов жидкостного охлаждения ротора,
эффективно решена.
Источники информации
1. Пахомин С.А., Сулейманов У.М. и др. Способ снижения шума реактивного индукторного двигателя. Патент РФ: RU 2166228 С2, Опубл. 27.04.2001.
2. Крайнов Д.В., Дувакин А.В. и др. Способ формирования тока в фазных обмотках реактивного индукторного двигателя. Патент РФ: RU 2229768 С2, Опубл. 27.05.2004.
3. Крайнов Д.В., Сулейманов У.М. и др. Способ формирования тока в фазных обмотках реактивного индукторного двигателя. Патент РФ: RU 2249298 С1, Опубл. 27.03.2005, Бюл. №9.
4. Проектирование электрических машин: Учебн. пособие для вузов. И.П. Копылов, Ф.А. Горяинов, Б.К. Клоков и др.; под ред. И.П. Копылова. - М.: Энергия, 1980, - 496 с., ил.
5. В. Володин. Гистерезисная модель нелинейной индуктивности симулятора LTspice. Силовая электроника №1, 2010 г, с. 56.
6. Шабаев В.А., Кругликов О.В., Тубис Я.Б. Шестифазный вентильно-индукторный двигатель, управляемый трехфазным током синусоидальной формы. Патент РФ: RU 2494518 С1, Опубл. 27.09. 2013, Бюл. №27.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕНТИЛЬНО-ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2014 |
|
RU2571955C1 |
| ВЫСОКООБОРОТНАЯ ВЕНТИЛЬНО-ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2021 |
|
RU2772705C1 |
| ВЕНТИЛЬНЫЙ ИНДУКТОРНО-РЕАКТИВНЫЙ ДВИГАТЕЛЬ | 2007 |
|
RU2352048C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437199C1 |
| ЭЛЕКТРИЧЕСКАЯ РЕДУКТОРНАЯ МАШИНА С ЭЛЕКТРОМАГНИТНЫМ ВОЗБУЖДЕНИЕМ | 2009 |
|
RU2401499C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416859C1 |
| СВЕРХПРОВОДНИКОВАЯ ВЕНТИЛЬНАЯ ИНДУКТОРНАЯ МАШИНА | 2001 |
|
RU2178942C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416860C1 |
| ВЕНТИЛЬНО-ИНДУКТОРНАЯ РЕАКТИВНАЯ МАШИНА | 2021 |
|
RU2780383C1 |
| ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2017 |
|
RU2660811C1 |
Изобретение относится к способу управления высокооборотной индукторной электрической машиной. Технический результат - уменьшение потерь в стали ротора и нагрева ротора от этих потерь. Электрическая машина имеет зубчатый безобмоточный ротор и зубчатый статор, на котором расположены одна или несколько фазных обмоток, каждая из которых питается от полупроводникового конвертора, а также систему управления, содержащую датчик положения ротора, в соответствии с сигналами которого к обмоткам фаз последовательно прикладывают импульсы напряжения. В каждой из фазных обмоток при первом (нечетном) приближении какого-либо зубца ротора к зубцу статора, несущему обмотку определенной фазы (например, фазы А), подлежащую возбуждению, импульс напряжения подают с полярностью одного направления (например, положительного), а при втором (четном) приближении этого же зубца ротора к диаметрально расположенному зубцу статора, несущему обмотку той же фазы (например, фазы А), подлежащую возбуждению, импульс напряжения подают с полярностью противоположного направления (отрицательного). Таким образом обеспечивают пульсирующее значение индукции в зубцах ротора без перемагничивания. 40 ил.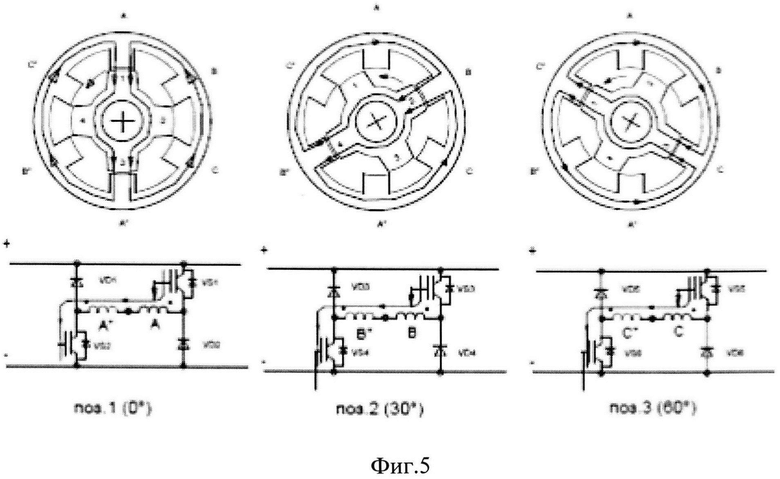
Способ управления высокооборотной индукторной электрической машиной, имеющей зубчатый безобмоточный ротор и зубчатый статор, на котором расположены одна или несколько фазных обмоток, каждая из которых питается от полупроводникового конвертора, имеющей также систему управления, содержащую датчик положения ротора, заключающийся в том, что в соответствии с сигналами датчика положения ротора к обмоткам фаз последовательно прикладывают импульсы напряжения, отличающийся тем, что в каждой из фазных обмоток при первом (нечетном) приближении какого-либо зубца ротора к зубцу статора, несущему обмотку определенной фазы (например, фазы А), подлежащую возбуждению в соответствии с сигналом датчика положения ротора, импульс напряжения подают с полярностью одного направления (например, положительного), а при втором (четном) приближении этого же зубца ротора к диаметрально расположенному зубцу статора, несущему обмотку той же фазы (например, фазы А), подлежащую возбуждению в соответствии с сигналом датчика положения ротора, импульс напряжения подают с полярностью противоположного направления (отрицательного), и таким образом обеспечивают за каждый оборот ротора неизменное направление магнитной индукции в зубцах ротора (в половине зубцов положительное, в другой половине - отрицательное), т.е. обеспечивают пульсирующее значение индукции без перемагничивания.
| СПОСОБ ФОРМИРОВАНИЯ ТОКА В ФАЗНЫХ ОБМОТКАХ РЕАКТИВНОГО ИНДУКТОРНОГО ДВИГАТЕЛЯ | 2003 |
|
RU2249298C1 |
| СПОСОБ ФОРМИРОВАНИЯ ТОКА В ФАЗНЫХ ОБМОТКАХ РЕАКТИВНОГО ИНДУКТОРНОГО ДВИГАТЕЛЯ | 2002 |
|
RU2229768C2 |
| СПОСОБ УПРАВЛЕНИЯ РЕАКТИВНЫМ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2003 |
|
RU2260243C1 |
| ВЕНТИЛЬНЫЙ ИНДУКТОРНЫЙ ЭЛЕКТРОПРИВОД | 2004 |
|
RU2274944C1 |
| Способ предохранения от попадания внутрь электровакуумных приборов металлических частиц | 1953 |
|
SU102159A1 |
| DE 4314211 A1, 03.11.1994. | |||

