Изобретение относится к железнодорожному транспорту, а именно к устройствам контроля состояния ответственных элементов и узлов грузового железнодорожного вагона и отслеживания его местоположения, и может быть использовано для получения актуальной информации о техническом состоянии грузовых вагонов на протяжении всего маршрута следования поезда.
Известен корпус подшипника колесной пары, содержащий встроенное в него устройство определения положения для рельсового транспортного средства, имеющее спутниковый радиоприемник определения положения, радиопередатчик, выполненный с возможностью передачи полученных от радиоприемника определения положения данных положения в удаленный сервер, и блок электроснабжения для снабжения устройства определения положения электрической энергией (Евразийский патент №020349 на изобретение «Корпус подшипника колесной пары с устройством определения положения для рельсового транспортного средства и снабженное им рельсовое транспортное средство», опубликовано 29.08.2014).
Недостатком технического решения, описанного в данном патенте, является то, что устройство определения положения встроено непосредственно в сам корпус подшипника колесной пары, что усложняет процесс установки данного устройства на вагон, требует проведения демонтажа и последующего монтажа корпуса подшипника колесной пары (буксового узла вагона) с использованием специального инструмента и навыков квалифицированного специалиста, а также требует наличия разрешающих документов на выполнение данных работ и, фактически, снимает гарантии изготовителя буксового узла.
Известно устройство мониторинга рельсового транспортного средства, содержащее установленные в корпусе с крышкой магнитоэлектрический генератор, механически соединенный с осью колесной пары, блок управления, блок хранения данных, блок передачи данных и блок определения местоположения, подключенный к блоку обработки данных, а также последовательно соединенные формирователь импульсов и счетчик импульсов. Выход магнитоэлектрического генератора по сигналу переменного напряжения связан с входом блока питания, выполненного с возможностью выпрямления и стабилизации выходного переменного напряжения магнитоэлектрического генератора, и с входом формирователя импульсов, выход которого связан с входом счетчика импульсов, выход которого связан с одним из входов блока обработки данных, другой вход блока обработки данных связан с выходом блока определения местоположения, а выход блока обработки данных связан с одним из входов блока хранения данных, другой вход которого связан с выходом блока управления, а выход - с блоком передачи данных, который по входу-выходу связан с блоком управления (патент РФ №2721219 на изобретение «Устройство мониторинга рельсового транспортного средства», опубликовано 18.05.2020).
Недостатками данного устройства являются недостаточная вандалозащищенность вследствие наличия у устройства крышки для доступа к устройству, а также недостаточная точность определения суммарного пробега вагона за достаточно длительный период эксплуатации. Это связано с тем, что в известном устройстве пробег вагона определяется расчетным методом исходя только из данных об измерении диаметра колеса, полученных непосредственно перед установкой устройства на вагон. Однако при этом неизбежно происходит накопление ошибки вычисления пробега из-за меняющегося в период эксплуатации вагона диаметра колеса.
Известно устройство мониторинга рельсового транспортного средства, содержащее установленные в корпусе процессор, модуль спутниковой системы навигации, модуль GSM, блок памяти, последовательно соединенные датчик ускорения и блок обработки диагностических данных, блок управления, центральный процессор и источник питания, включающий аккумуляторную батарею с контроллером заряда и магнитоэлектрический генератор. Корпус выполнен со съемной крышкой, одна часть которой выполнена из радиопрозрачного материала, напротив нее размещены антенны модуля спутниковой системы навигации и модуля GSM. Противоположная крышке сторона корпуса является его основанием, в котором выполнены отверстия для крепления переднего подшипникового щита к основанию корпуса, для установки и фиксации основания корпуса на крепительной крышке буксового узла и для соединения вала ротора генератора посредством соответствующей муфты с осью колесной пары (патент РФ №2627959 на изобретение «Устройство мониторинга рельсового транспортного средства и магнитоэлектрический генератор», опубликовано 14.08.2017). Данное устройство принято за прототип.
Недостатками данного устройства являются ограниченная функциональность, недостаточная точность определения фактически пройденного расстояния и фактической скорости вагона, отсутствие возможности отслеживания местоположения вагона в отсутствие GPS-сигнала, а также недостаточная надежность хранения и передачи регистрируемых данных.
Технический результат, на достижение которого направлено заявляемое изобретение, заключается в повышении точности определения фактически пройденного вагоном расстояния и фактической скорости движения грузового вагона по датчику оборотов колеса для оптимизации и уменьшения необходимости технического обслуживания грузового вагона с последующим переходом на техническое обслуживание по состоянию c прогнозируемым отказом, обеспечении возможности отслеживания местоположения и вектора движения грузового вагона при отсутствии сигналов спутниковой навигационной системы, например, при движении грузового вагона в тоннеле, за счет использования данных от блока связи по сигналам от базовых станций сотовой связи и в результате расчетов, произведенных модулем инерциальной навигации блока процессора на основании данных от датчика ускорений, магнитометра и гироскопа блока датчиков.
Технический результат также заключается в обеспечении возможности автоматического определения фактического диаметра колеса и отслеживания его изменения, определения продольно-динамических воздействий на вагон в трех плоскостях с контролем превышения задаваемого порога, возможности контроля ответственных узлов вагона, к которым подключены дополнительные датчики, а также обеспечении постоянства записи всех регистрируемых данных в энергонезависимую память с контролем их целостности.
Отсутствие у корпуса устройства крышки повышает степень вандалозащищенности устройства, а установка устройства не в непосредственно корпус буксового узла упрощает процесс монтажа устройства.
Заявляемый технический результат достигается тем, что устройство мониторинга и диагностики грузового вагона содержит корпус, передняя часть которого полностью или частично выполнена из радиопрозрачного материала, при этом задняя часть корпуса является его основанием, в котором выполнены отверстия для его фиксации с внешней стороны буксового узла грузового вагона, внутри корпуса размещены блок GPS/ГЛОНАСС позиционирования для отслеживания местоположения грузового вагона, блок связи для передачи данных местоположении и состоянии грузового вагона на удаленный сервер, блок датчиков, содержащий датчик оборотов колеса, блок внешнего интерфейса для подключения внешних дополнительных датчиков или систем, блок процессора, осуществляющий взаимодействие между блоками и узел автономного электропитания для снабжения электрической энергией всех блоков устройства, согласно изобретению блок внешнего интерфейса выполнен в виде проводного или беспроводного цифрового интерфейса, выполненного с возможностью передачи электрической энергии от узла автономного электропитания, датчик оборотов колеса основан на эффекте Холла, блок процессора программным модулем инерциальной навигации дополнительно осуществляет обработку данных о местоположении грузового вагона по данным датчика ускорений, гироскопа и магнитометра, входящих в состав блока датчиков, с учетом триангуляции расстояния до ближайших станций мобильной сотовой связи от блока связи, при этом блок памяти обеспечивает постоянство записи заданных о местоположении и состоянии грузового вагона записывая новые данные поверх самых ранних, тем самым образуя кольцевой буфер.
Узел автономного электропитания содержит электрический генератор, блок управления питанием, блок стабилизации мощности и аккумуляторную батарею.
Блок управления питанием снабжен модулем управления уровнем заряда аккумуляторной батареи и контроля состояния аккумуляторной батареи.
Блок датчиков содержит датчик температуры и/или датчик несанкционированного снятия устройства.
Помимо фиксации абсолютного значения температуры буксового узла блок процессора вычисляет скорость изменения температуры, тем самым фиксируя момент начала перегрева буксового узла для последующей записи в блок памяти.
Датчик оборотов колеса содержит две зоны чувствительности, которые выполнены со смещением по фазе для определения направления движения грузового вагона и повышения быстродействия определения заклинивания колесной пары грузового вагона блоком процессора для последующей записи в блок памяти.
Блок датчиков может быть расположен в задней части корпуса устройства.
Устройство может содержать внешние датчики, расположенные на вагоне, подключенные к блоку процессора и узлу автономного электропитания и позволяющие контролировать в том числе ответственные узлы вагона, сохранность и вес перевозимого груза.
Блок процессора осуществляет периодический контроль фактического диаметра колеса, замеряя пройденное грузовым вагоном расстояние по данным блока GPS/ГЛОНАСС позиционирования и модуля инерциальной навигации блока процессора и деля его на количество оборотов колеса, полученное с датчика числа оборотов, и при соответствующем изменении делает запись в блок памяти.
Запись данных о местоположении грузового вагона в блок памяти осуществляется через интервал, зависящий от текущей скорости движения грузового вагона, но не менее 50 м или при превышении критических значений параметров состояния грузового вагона.
Антенны блока GPS/ГЛОНАСС позиционирования и блока связи установлены таким образом, чтобы диаграммы направленности каждой антенны своими максимальными лепестками были направлены между вертикальной и горизонтальной осью.
Данные о местоположении и состоянии грузового вагона фиксируются через равные расстояния или при превышении заданных критических значений, записываются в блок энергонезависимой памяти и передаются на удаленный сервер при наличии канала связи через блок связи.
Блок памяти выполнен с использованием технологии электрически перепрограммируемой памяти в виде микросхемы на базе полупроводниковой технологии.
На основании данных о местоположении, состоянии грузового вагона удаленным сервером формируются соответствующие отчеты и рассылаются заданным пользователям посредством службы электронной почты или коротких текстовых сообщений в заранее заданное время и/или при превышении соответствующего критического значения параметра, задаваемого для каждого грузового вагона или группы вагонов отдельно.
Устройство может содержать нагревательный элемент.
Заявляемое изобретение поясняется чертежами на фиг. 1-5:
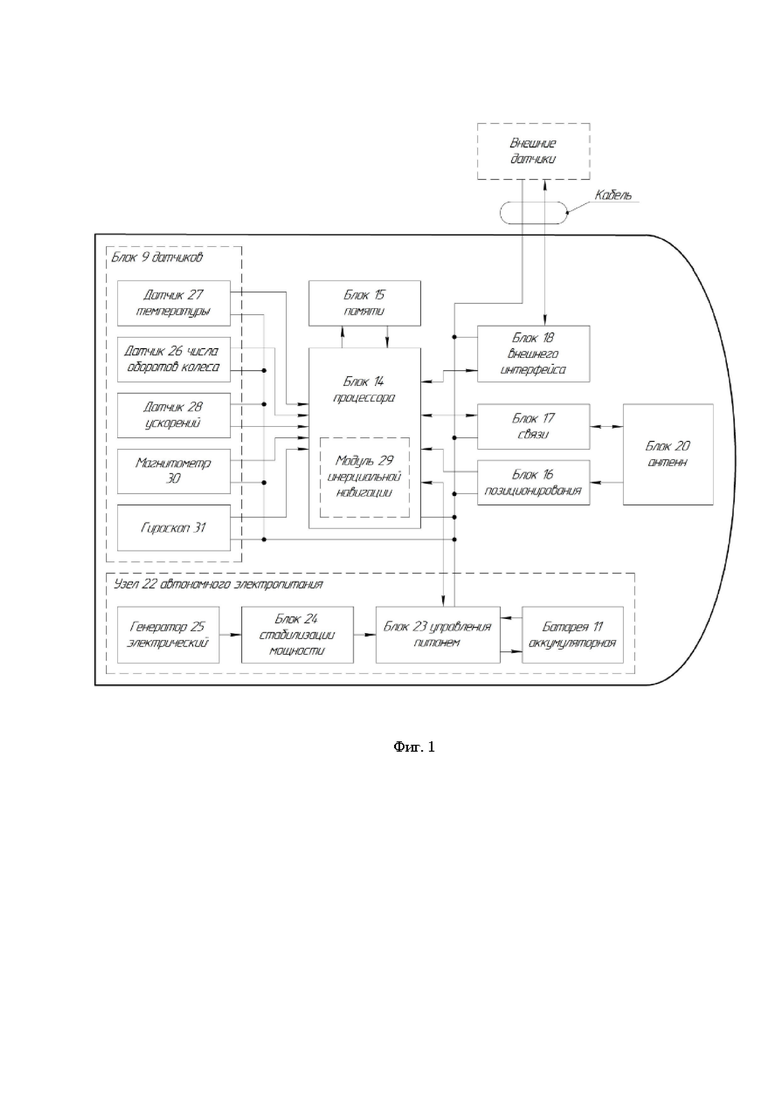
Фиг. 1 - структурная схема устройства мониторинга и диагностики грузового вагона;
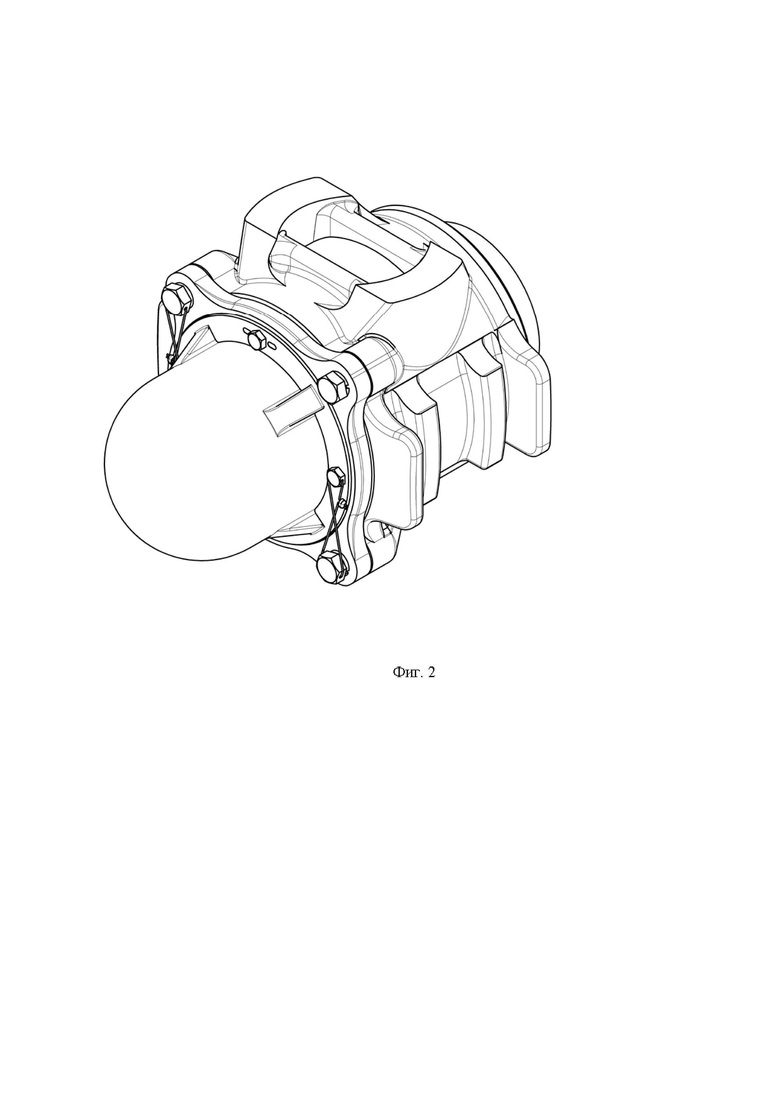
Фиг. 2 - устройство мониторинга и диагностики грузового вагона на буксовом узле;
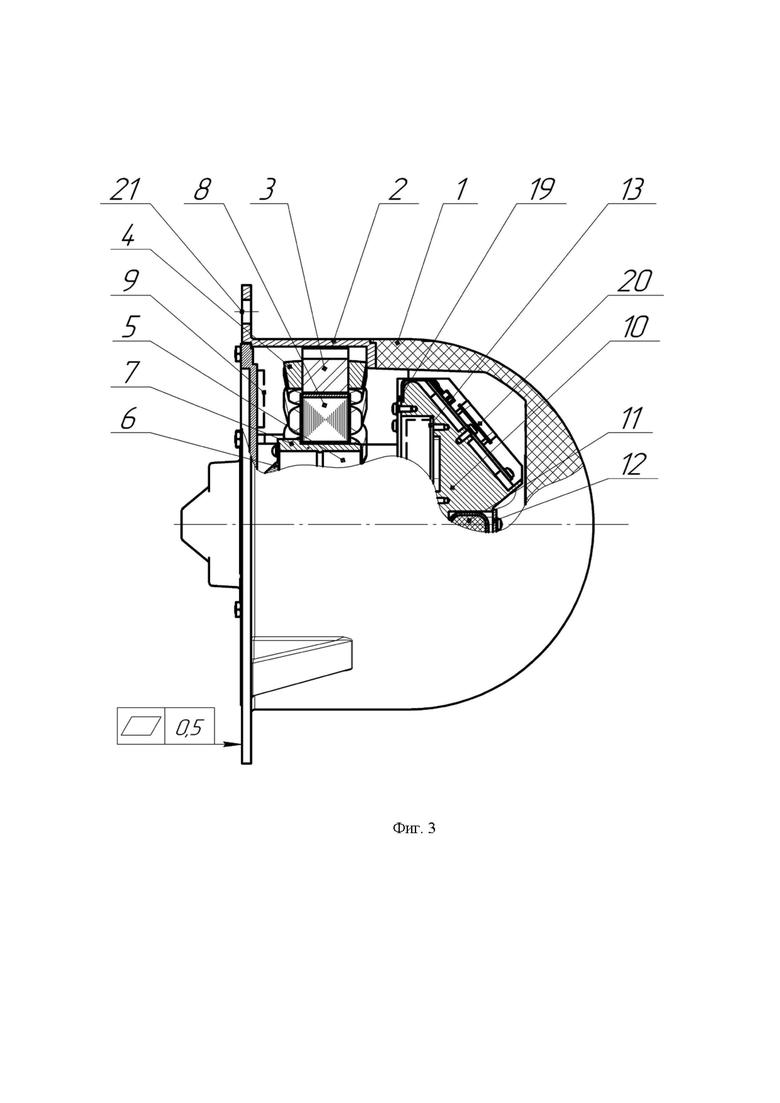
Фиг. 3 - вид сбоку и разрез устройства мониторинга и диагностики грузового вагона;
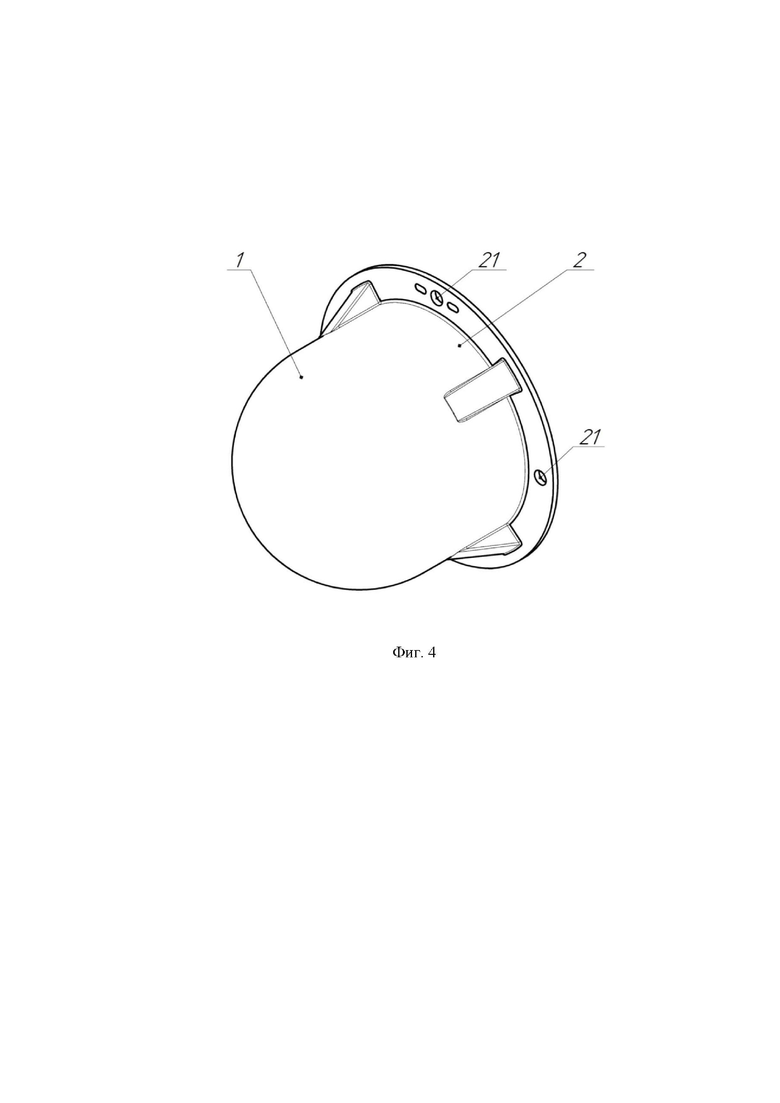
Фиг. 4 - вид исполнения устройства без блока внешнего интерфейса;
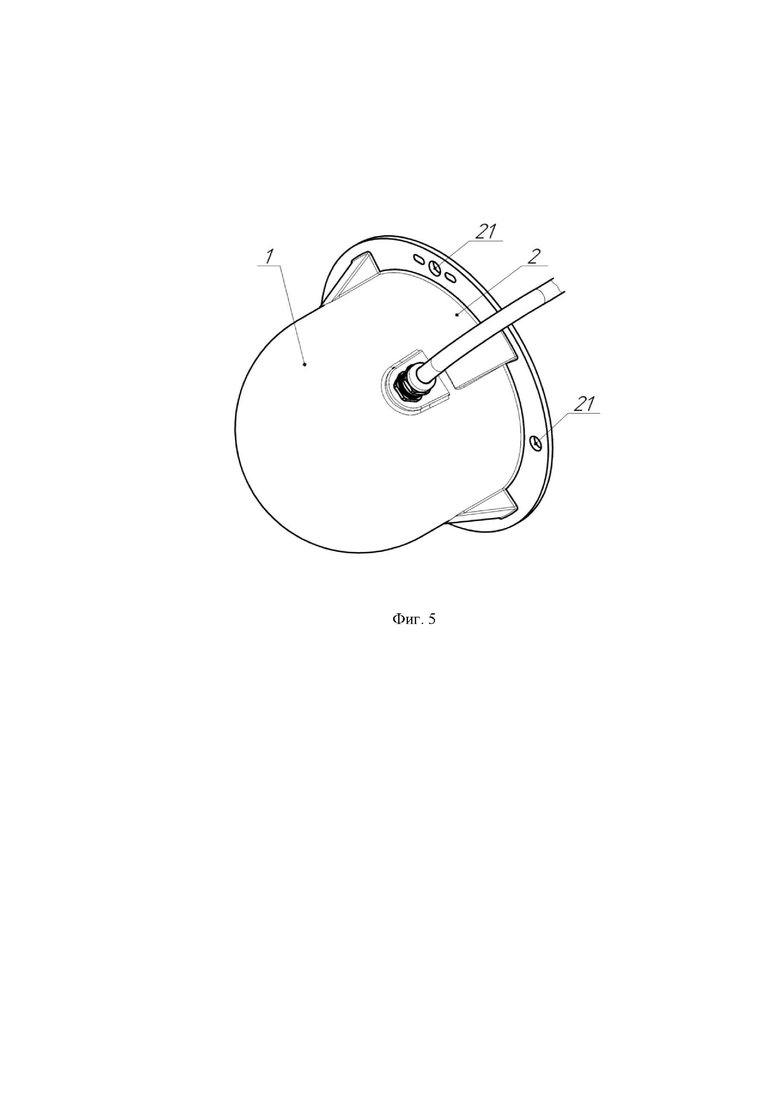
Фиг. 5 - вид исполнения устройства с блоком внешнего интерфейса в виде проводного цифрового интерфейса (кабеля).
Устройство мониторинга и диагностики грузового вагона содержит корпус, состоящий из передней части 1 корпуса и задней части 2 корпуса. В задней части 2 корпуса размещен генератор, содержащий магнитопровод 3 статора с намотанными на него катушками 4, внутри которых посредством подшипников 5 вращается вал 6 ротора 7 с установленными в нем постоянными магнитами 8, и блок 9 датчиков. Блок датчиков расположен в задней части для получения более точных показаний датчиков и систем. В передней части 1 корпуса установлен вкладыш 10, в котором размещены аккумуляторная батарея 11, фиксирующаяся крышкой 12 и плата электроники 13 с размещенными на ней блоком 14 процессора, блоком 15 памяти, блоком 16 GPS/ГЛОНАСС позиционирования, блоком 17 связи, блоком 18 внешнего интерфейса, фиксирующимся крышкой 19, и блоком 20 антенн.
Передняя часть 1 корпуса полностью выполнена из радиопрозрачного материала, например, из износостойкой комбинации сополиэфиров или АБС-пластика (ударопрочная техническая термопластическая смола на основе сополимера акрилонитрила с бутадиеном и стиролом). Противоположная передней части 1 корпуса задняя часть 2 корпуса является его основанием, в котором выполнены отверстия 21 болтового крепления для установки и фиксации корпуса устройства на детали буксового узла с внешней его стороны, например, на крепительной крышке буксового узла в посадочном месте смотровой крышки.
Корпус устройства выполнен единым и герметичным для защиты элементов устройства от проникновения посторонних предметов, пыли и влаги.
Устройство включает в себя узел 22 автономного электропитания (фиг. 1), который содержит блок 23 управления питанием, блок 24 стабилизации мощности, аккумуляторную батарею 11 и генератор 25 и предназначен для организации электропитания всех блоков устройства вне зависимости от нахождения грузового вагона в движении или на стоянке.
Генератор 25 может быть построен по принципу многофазной электрической машины с ротором 7 на постоянных магнитах 8 с чередующейся полярностью, вращающимся внутри статора с зубцами, на которых размещены катушки 4 фазных обмоток, выводные концы которых подключены соответствующим образом к входам блока 24 стабилизации мощности, конструктивно позволяющему обеспечивать требуемую выходную мощность при низких скоростях вращения ротора генератора при движении грузового вагона от 5 км/ч. В качестве генератора может быть использован электрический генератор. Блок 24 стабилизации мощности управляет подключением обмоток генератора 25 для получения требуемой выходной мощности при любой скорости вращения ротора 7 генератора при изменяющимся токе потребления нагрузки с одновременным ограничением величины выходного напряжения и содержит в себе выпрямитель, позволяющий подключить выход блока 24 стабилизации мощности напрямую к входу блока 23 управления питанием.
Блок 23 управления питанием формирует необходимые питающие напряжения для всех блоков устройства мониторинга и диагностики грузового вагона, включая электропитание внешних подключаемых датчиков, и может быть снабжен модулем управления уровнем заряда аккумуляторной батареи и контроля ее состояния (на чертеже не показан).
Блок 23 управления питанием осуществляет переключение между режимами разряда аккумуляторной батареи 11 при нахождении грузового вагона на стоянке или заряда батареи при достаточном токе после блока 24 стабилизации мощности, который осуществляет управление режимами включения генератора 25 для получения заданного значения напряжения и тока в независимости от скорости вращения оси генератора.
Блок 23 управления питанием осуществляет контроль уровня и состояния аккумуляторной батареи 11, контроль значения напряжения и тока после блока 24 стабилизации мощности и передает необходимую информацию в блок 14 процессора для дальнейшего анализа и сохранения в блоке 15 памяти.
Аккумуляторная батарея 11 предназначена для накопления получаемой от генератора 25 энергии и обеспечения электропитанием устройства во время стоянки грузового вагона или в случае недостаточной вырабатываемой генератором 25 мощности при низкой скорости вращения оси генератора.
В одном из возможных вариантов исполнения генератор 25 содержит ротор 7 в виде вала 6, который вращается внутри статора, на магнитопроводе 3 которого располагаются фазные катушки 4, соединение которых по необходимой схеме осуществляет блок 24 стабилизации мощности.
Вал 6 ротора 7 вращается относительно корпуса на подшипниках 5, расположение и конструкция которых компенсируют высокие продольные и поперечные ударные нагрузки, возникающие при движении грузового вагона одновременно с вращением оси колесной пары, на которой установлено устройство.
Передача вращающего момента с оси колесной пары на ось вала 6 генератора 25 осуществляется через узел передачи вращающегося момента (на чертеже не показан), выполненный, например, в виде конструкции, раскрытой в патенте RU 2627959.
Конструкция и количество катушек 4 статора, количество и магнитная сила магнитов 8 выбраны таким образом, чтобы получить мощность генератора 25 не менее 10 Вт при скорости движения грузового вагона 5 км/ч, что позволяет получить мощность, нелинейно увеличивающуюся от частоты вращения оси колесной пары грузового вагона, не менее 420 Вт при скорости движения вагона порядка 120 км/ч.
Блок 24 стабилизации мощности выполняет преобразование выходного многофазного напряжения с генератора 25 в напряжение постоянного тока и может осуществлять коммутацию фазных катушек 4 в зависимости от скорости вращения вала 6, позволяя получить максимально возможную мощность при малых оборотах ротора 7 и ограничить напряжение и ток при больших оборотах ротора 7 для получения необходимого значения мощности, требуемой как для электропитания всех блоков устройства, так и заряда аккумуляторной батареи 11, управление режимами заряда которой осуществляет блок 23 управления питанием на основании контролируемых данных о ее фактической емкости.
Избыток мощности, вырабатываемой генератором 25, можно использовать для электропитания дополнительных электронных устройств, датчиков или систем, подключаемых к устройству.
На отдельной плате 13 электроники размещены блок 14 процессора и блок 15 памяти. Блок 15 памяти выполнен с использованием технологии электрически перепрограммируемой энергонезависимой памяти в виде микросхемы на базе полупроводниковой технологии, например, флэш-памяти (EEPROM).
Блок 15 памяти, обеспечивающий запись и хранение данных о местоположении и состоянии грузового вагона, построен в виде кольцевого буфера, когда новые данные записываются поверх самых ранних. Объем памяти составляет более 1 Мбайта которого достаточно чтобы уместить все данные не менее чем за 3 месяцев активной эксплуатации грузового вагона.
Блок 18 внешнего интерфейса может быть выполнен в виде проводного (кабеля) или беспроводного цифрового интерфейса со стандартным протоколом обмена данными, выполненного с возможностью проводной или беспроводной передачи электрической энергии от узла автономного электропитания - с цепями электропитания от блока 23 управления питанием устройства для подключения дополнительных датчиков контроля состоянии грузового вагона или его ответственных узлов, включая датчик величины загрузки по всем осям грузового вагона и/или датчик сохранности груза, дополнительные датчики и устройства для отслеживания параметров и состояния рельсового пути (на чертеже не показаны), расположенные на грузовом вагоне и подключенные к блоку 14 процессора.
Датчик величины загрузки грузового вагона может содержать датчики величины прогиба надрессорной балки тележек грузового вагона, которые могут устанавливаться в их рессорных комплектах.
Блок 18 внешнего интерфейса позволяет считывать или задавать необходимые конфигурационные параметры датчиков или устройства в целом, а также получать часть или все хранящиеся в блоке 15 памяти данные , при помощи, например, планшетного компьютера непосредственно на месте установки устройства на грузовом вагоне.
Блок 16 GPS/ГЛОНАСС позиционирования, блок 17 связи и блок 18 внешнего интерфейса устанавливаются в отдельном вкладыше 10 внутри корпуса устройства, причем их антенны устанавливаются ближе к передней части 1 корпуса, для чего она полностью или частично выполнена из радиопрозрачного материала. Антенны блока 16 GPS/ГЛОНАСС позиционирования, блока 17 связи и блока 18 внешнего интерфейса объединены в один блок 20 антенн, который расположен таким образом, что диаграммы направленности каждой антенны своими максимальными лепестками расположены между вертикальной и горизонтальной осями для обеспечения устойчивой связи. Крепление корпуса устройства за пределами корпуса буксового узла также способствует обеспечению устойчивой связи.
Устройство также содержит размещенные в задней части 2 корпуса и связанные с блоком 14 процессора блок 9 датчиков, содержащий датчик 26 числа оборотов колеса, датчик 27 температуры, датчик 28 ускорений и датчик несанкционированного снятия устройства (на чертеже не показан).
Наличие датчика 26 числа оборотов колеса позволяет определять фактически пройденное вагоном расстояние и фактическую скорость вагона на основании данных диаметра колеса, что позволяет избежать накопление ошибки вычисления пробега вагона из-за меняющегося в период эксплуатации вагона диаметра колеса и оптимизировать период технического обслуживания грузового вагона.
Кроме того, наличие датчика 26 числа оборотов колеса позволяет осуществлять периодический контроль фактического диаметра колеса по заданному алгоритму из нескольких условий, замеряя пройденное грузовым вагоном расстояние по данным блока 16 GPS/ГЛОНАСС позиционирования и/или блока 17 связи с добавлением поправочных данных от модуля инерциальной навигации и деля его на фактическое количество оборотов колеса, полученное с датчика 26 числа оборотов, и при соответствующем отклонении делать запись в блок 15 памяти, что позволит выявлять критически допустимый диаметр колесной пары.
Датчик 26 оборотов колеса основан на эффекте Холла и содержит две зоны чувствительности, которые выполнены со смещением по фазе для определения направления движения грузового вагона. Выполнение датчика 26 оборотов колеса на основе эффекта Холла позволяет существенно повысить точность определения частоты вращения ротора, значительно упрощает аппаратную часть устройства и повышает быстродействие определения заклинивания колесной пары (юз).
Датчик 27 температуры предназначен для контроля значения температуры буксового узла вагона. Блок 14 процессора позволяет контролировать скорость изменения температуры буксы, тем самым фиксируя как критически допустимую температуру, так и начало перегрева буксового узла для последующей записи в блок 15 памяти.
Датчик 28 ускорений фиксирует значение действующих на грузовой вагон ускорений по трем осям, а также наклон кузова вагона относительно линии горизонта как в продольном, так и в поперечном направлении, что позволяет определять превышение допустимых значений продольно-динамических усилий и вертикальных сил, а также, совместно с датчиком 26 числа оборотов колеса, определять дефекты на поверхности катания колеса или места дефектов рельсовой нити, фиксировать их в блоке 15 памяти с отметками времени и местоположения, что позволяет своевременно обнаруживать дефекты на поверхности катания колесной пары.
По резкому изменению скорости вращения оси колесной пары (скорости движения грузового вагона) по датчику оборотов колеса позволяет блоку 14 процессора фиксировать заклинивание колесной пары (юз) для последующей записи в блок 15 памяти.
Общее количество устанавливаемых на устройстве датчиков и их типов зависит от исполнения (конфигурации) устройства мониторинга и диагностики грузового вагона.
Модуль 29 инерциальной навигации включает в себя датчик 28 ускорений, магнитометр 30 и гироскоп 31 и служит для определения местоположения грузового вагона в пространстве не зависимо от данных блока 16 позиционирования с учетом триангуляции расстояния до ближайших станций мобильной сотовой связи от блока 17 связи.
Данные о местоположении и диагностике грузового вагона фиксируются в блоке 14 процессора по заданному заранее алгоритму, например, через равные расстояния маршрута следования вагона с интервалом, зависящим от текущей скорости движения грузового вагона, но не менее 50м, и/или при превышении контролируемыми параметрами установленных критических значений с отметкой даты, времени и местоположения фиксируемого события. Данные записываются в блок 15 памяти и передаются на удаленный сервер и/или локомотив при наличии канала связи через блок 17 связи.
Все сохраненные в блоке 15 памяти данные отправляются на удаленный сервер сбора данных через сеть Интернет по каналам операторов мобильной сотовой связи при наличии соответствующего соединения с места последних отправленных данных в блоке 15 памяти до места самой крайней записи, чем обеспечивается полнота всех отправляемых на сервер данных из блока памяти устройства.
Удаленный сервер (на чертеже не показан) представляет собой стационарный вычислительный комплекс, выполняющий функции сбора, хранения и обработки данных, поступающих от всех работающих устройств, установленных на грузовых вагонах. Блок 14 процессора устройства на вагоне при наличии каналов связи блока 17 связи устанавливает соединение с сервером и передает на него новые данные, записанные в блок 15 памяти устройства с момента последнего сеанса обмена с сервером. Удаленный сервер проводит анализ полученных с устройств данных и при превышении заданных параметров их нормативных значений оперативно информирует обслуживающий и эксплуатационный персонал доступными способами. Так же по запросу или в заданное время удаленный сервер может формировать, сохранять и отправлять нормативные и задаваемые формы отчетов эксплуатационных параметров работы вагонного парка, оборудованного устройствами мониторинга и диагностики грузового вагона.
Устройство мониторинга и диагностики грузового вагона позволяет во время соединения с сервером для отправки записанных данных одновременно получать набор конфигурационных данных, включая критические значения параметров состояния грузового вагона и режимов работы устройства.
Блок 14 процессора также может содержать встроенные вычислительные средства, достаточные для осуществления предварительного анализа данных, и передавать сообщения на удаленный сервер при обнаружении вероятности отказа какой-либо детали.
К удаленному серверу может быть подключено стационарное или портативное вычислительное устройство пользователя (персональный компьютер, ноутбук, мобильный телефон), которое через сеть Интернет посредством веб-интерфейса будет запрашивать, получать и сохранять формы отчетов, оперативные данные и экстренную телесигнализацию по собственному парку грузовых вагонов. Также доступ к информации удаленного сервера может быть получен сервером сбора и обработки данных собственника вагонного парка через программный интерфейс приложения, в том числе через копирование базы данных с сервера с применением системы многоступенчатой аутентификации.
Для нормального функционирования устройства при значении температуры от минус 40°C устройство может содержать нагревательный элемент (на чертеже не показан) в виде гибких и/или жестких пластин, что позволяет нагревать блоки устройства и/или батарею аккумуляторную до заданной рабочей температуры, обеспечивая возможность использования устройства в самых холодных климатических районах (I1, I2 по ГОСТ 16350-80) Российской Федерации.
Устройство мониторинга и диагностики грузового вагона работает следующим образом.
Предварительно перед установкой устройства на буксовый узел вагона в операционную память блока 14 процессора через блок 18 внешнего интерфейса вводят уникальный номер грузового вагона и фактический диаметр колеса.
Корпус устройства устанавливают за пределами корпуса буксового узла, например, при помощи болтового крепления на крепительной крышке буксового узла в посадочные места смотровой крышки.
При движении грузового вагона ротор 7 генератора 25 вращается с частотой вращения оси колесной пары. Во время остановки вагона генератор 25 находится в нерабочем состоянии, устройство работает от накопленного заряда аккумуляторной батареи 11.
При движении грузового вагона блок 16 GPS/ГЛОНАСС позиционирования в режиме реального времени в зоне действия спутников определяет текущее местоположение грузового вагона и направляет эти данные в блок 14 процессора. В случае отсутствия сигнала спутниковой навигационной системы местоположение осуществляется посредством определения блоком 17 связи расстояния до ближайших станций мобильной сотовой связи и/или модулем 29 инерциальной навигации. Таким образом, обеспечивается постоянный контроль и фиксация перемещения вагона независимо от количества видимых спутников навигационной системы или базовых станций операторов сотовой связи.
Блок 14 процессора с заранее установленной периодичностью осуществляет запись данных о местоположении грузового вагона и его состоянии в зависимости от принятой от всех датчиков информации в блок 15 памяти и при наличии заданного уровня сигнала и каналов операторов сотовой связи осуществляет передачу на удаленный сервер части накопленных данных, например:
- температура буксы, на которой установлено устройство;
- скорость изменения температуры буксы;
- фактическая скорость движения вагона;
- расстояние, фактически пройденное вагоном (одометр);
- определение отклонений на поверхности катания колеса по изменению ускорений;
- определение начала и окончания движения вагона;
- величина текущего веса и загрузки грузового вагона;
- информация о состоянии аккумуляторной батареи;
- вскрытие буксового узла;
- превышение допустимых продольных и динамических нагрузок (удары, ускорения);
- определение мест повреждения рельсовой нити;
- определение заклинивания оси колесной пары, на которой установлено устройство (юз);
- контроль сохранности груза.
Кроме того, передача данных от датчиков и модуля управления зарядом и состоянием аккумуляторной батареи 11 может осуществляться либо по запросу блока 14 процессора, либо при превышении измеряемыми параметрами некоторого заданного критического значения.
Блок 14 процессора в соответствии с заданной программой осуществляет соответствующую обработку полученных данных, записывает их в энергонезависимую память 15, после чего формирует сообщение в режиме реального времени, включающее информацию об идентификационном номере вагона, диагностические данные и данные о местонахождении вагона и направляет его в блок 17 связи.
При установлении канала связи блок 17 связи передает сообщение на удаленный сервер сбора и обработки данных и/или локомотив поезда. В случае отсутствия сети блок 17 связи информирует об этом блок 14 процессора, помечает в блоке 15 памяти место, данные до которого уже имеются на удаленном сервере. При появлении канала связи блок 17 связи информирует блок 14 процессора, который в свою очередь передает на удаленный сервер все данные с помеченного ранее места до самой последней имеющейся записи. После удачного завершения сеанса связи, передачи всех необходимых данных и получения информации об их успешной доставке, блок 14 процессора завершает сеанс связи и помечает в блоке 15 памяти новое место, данные до которого уже имеются на удаленном сервере.
При необходимости удаленный сервер формирует необходимые отчеты на основании анализа полученных от устройств данных и рассылает их заинтересованным лицам согласно задаваемому списку, либо они получают доступ к данным сведениям посредством использования веб-интерфейса (электронной почты) или коротких текстовых сообщений либо через программный интерфейс приложения в заранее заданное время, и/или при превышении соответствующего критического значения параметра, задаваемого для каждого грузового вагона или группы вагонов отдельно. Также возможно получение данных о местоположении и состоянии грузового железнодорожного вагона непосредственно с устройства с использованием блока 18 внешнего интерфейса при наличии у пользователя смартфона или планшетного компьютера с установленным приложением и успешной пройденной соответствующей процедуры авторизации на удаленном сервере.
Таким образом, устройство мониторинга и диагностики грузового вагона в режиме реального времени обеспечивает контроль местоположения и технического состояния грузового вагона при различных скоростях его движения с возможностью оперативного информирования заинтересованных лиц о нарушениях в работе грузового вагона, нештатных ситуациях, превышения заданных параметров допустимых значений и формирования заданных форм отчетности работы собственного вагонного парка, способствуя увеличению периода технического обслуживания грузового вагона и эффективности его работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА МОНИТОРИНГА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2022 |
|
RU2800560C1 |
| Устройство мониторинга рельсового транспортного средства | 2018 |
|
RU2721219C2 |
| УСТРОЙСТВО МОНИТОРИНГА РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА И МАГНИТОЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР | 2016 |
|
RU2627959C1 |
| Система для мониторинга и контроля состояния рельсового пути | 2017 |
|
RU2652338C1 |
| СИСТЕМА ДИСТАНЦИОННОГО МОНИТОРИНГА СОСТОЯНИЯ ВАГОНОВ | 2015 |
|
RU2608206C1 |
| Бортовое устройство для диагностики состояния рельсового пути | 2019 |
|
RU2704692C1 |
| УСТРОЙСТВО-СИСТЕМА РАСПОЗНОВАНИЯ МЕСТОНАХОЖДЕНИЯ И ПАРАМЕТРОВ ДВИЖЕНИЯ ГРУЗОВОГО ВАГОНА | 2018 |
|
RU2698263C1 |
| АВТОМАТИЧЕСКИЙ ИДЕНТИФИКАТОР НОМЕРА ВАГОНА | 2012 |
|
RU2508216C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ ИДЕНТИФИКАЦИИ НОМЕРА ВАГОНА | 2013 |
|
RU2524806C1 |
| ТЕРМИНАЛ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2537892C1 |
Изобретение относится к средствам мониторинга и диагностики грузового вагона. Устройство содержит корпус, состоящий из передней части (1) корпуса и задней части (2) корпуса. В задней части (2) корпуса размещен генератор, содержащий магнитопровод (3) статора с намотанными на него катушками (4), внутри которых посредством подшипников (5) вращается вал (6) ротора (7) с установленными в нем постоянными магнитами (8), и блок (9) датчиков. Блок датчиков расположен в задней части для получения более точных показаний датчиков и систем. В передней части (1) корпуса установлен вкладыш (10), в котором размещены аккумуляторная батарея (11), фиксирующаяся крышкой (12), и плата электроники (13) с размещенными на ней блоком (14) процессора, блоком (15) памяти, блоком (16) GPS/ГЛОНАСС позиционирования, блоком (17) связи, блоком (18) внешнего интерфейса, фиксирующимся крышкой (19), и блоком (20) антенн. Достигается возможность контроля узлов грузового вагона с подключёнными дополнительными датчиками. 14 з.п. ф-лы, 5 ил.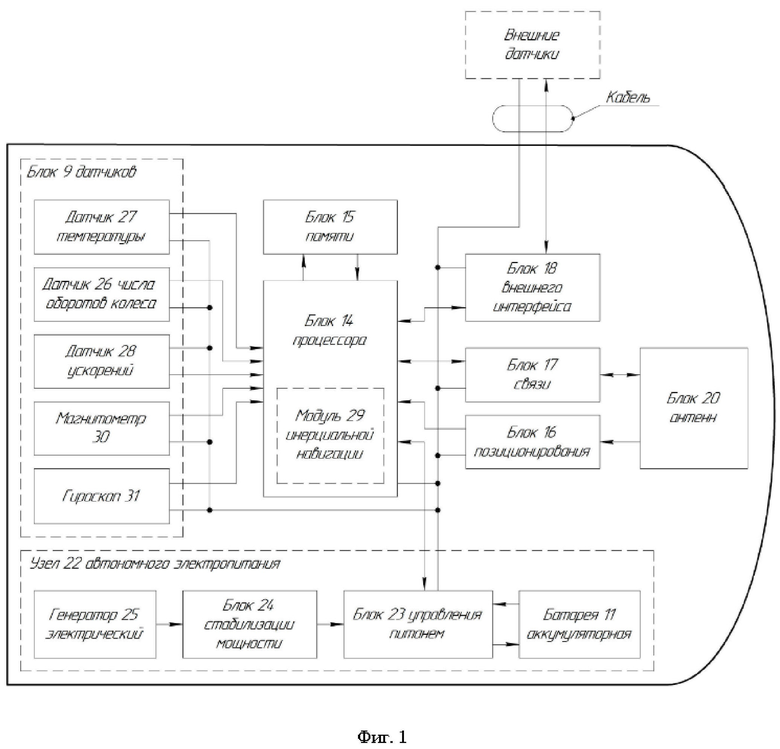
1. Устройство мониторинга и диагностики грузового вагона, содержащее корпус, передняя часть которого полностью или частично выполнена из радиопрозрачного материала, при этом задняя часть корпуса является его основанием, в котором выполнены отверстия для его фиксации с внешней стороны буксового узла грузового вагона, внутри корпуса размещены блок GPS/ГЛОНАСС позиционирования для отслеживания местоположения грузового вагона, блок связи для передачи данных местоположения и состояния грузового вагона на удаленный сервер, блок датчиков, содержащий датчик оборотов колеса, блок внешнего интерфейса для подключения внешних дополнительных датчиков или систем, блок процессора, осуществляющий взаимодействие между блоками, и узел автономного электропитания для снабжения электрической энергией всех блоков устройства, отличающееся тем, что блок внешнего интерфейса выполнен в виде проводного или беспроводного цифрового интерфейса, выполненного с возможностью передачи электрической энергии от узла автономного электропитания, датчик оборотов колеса основан на эффекте Холла, блок процессора программным модулем инерциальной навигации дополнительно осуществляет обработку данных о местоположении грузового вагона по данным датчика ускорений, гироскопа и магнитометра, входящих в состав блока датчиков, с учетом триангуляции расстояния до ближайших станций мобильной сотовой связи от блока связи, при этом блок памяти обеспечивает постоянство записи данных о местоположении и состоянии грузового вагона, записывая новые данные поверх самых ранних, тем самым образуя кольцевой буфер.
2. Устройство мониторинга и диагностики грузового вагона по п. 1, отличающееся тем, что узел автономного электропитания содержит электрический генератор, блок управления питанием, блок стабилизации мощности и аккумуляторную батарею.
3. Устройство мониторинга и диагностики грузового вагона по п. 2, отличающееся тем, что блок управления питанием снабжен модулем управления уровнем заряда аккумуляторной батареи и контроля состояния аккумуляторной батареи.
4. Устройство мониторинга и диагностики грузового вагона по п. 1, отличающееся тем, что блок датчиков содержит датчик температуры.
5. Устройство мониторинга и диагностики грузового вагона по п. 4, отличающееся тем, что помимо фиксации абсолютного значения температуры буксового узла блок процессора вычисляет скорость изменения температуры, тем самым фиксируя момент начала перегрева буксового узла для последующей записи в блок памяти.
6. Устройство мониторинга и диагностики грузового вагона по п. 1, отличающееся тем, что датчик оборотов колеса содержит две зоны чувствительности, которые выполнены со смещением по фазе для определения направления движения грузового вагона и повышения быстродействия определения заклинивания колесной пары грузового вагона блоком процессора для последующей записи в блок памяти.
7. Устройство мониторинга и диагностики грузового вагона по п. 1, отличающееся тем, что блок датчиков содержит датчик несанкционированного снятия устройства.
8. Устройство мониторинга и диагностики грузового вагона по п. 1, отличающееся тем, что блок датчиков расположен в задней части корпуса устройства.
9. Устройство мониторинга и диагностики грузового вагона по п. 1, отличающееся тем, что содержит внешние датчики, расположенные на вагоне, подключенные к блоку процессора и узлу автономного электропитания и позволяющие контролировать в том числе ответственные узлы вагона, сохранность и вес перевозимого груза.
10. Устройство мониторинга и диагностики грузового вагона по п. 1, отличающееся тем, что блок процессора осуществляет периодический контроль фактического диаметра колеса, замеряя пройденное грузовым вагоном расстояние по данным блока GPS/ГЛОНАСС позиционирования и модуля инерциальной навигации блока процессора и деля его на количество оборотов колеса, полученное с датчика числа оборотов, и при соответствующем изменении делает запись в блок памяти.
11. Устройство мониторинга и диагностики грузового вагона по п. 1, отличающееся тем, что данные о местоположении и состоянии грузового вагона фиксируются через равные расстояния или при превышении заданных критических значений, записываются в блок энергонезависимой памяти и передаются на удаленный сервер при наличии канала связи через блок связи.
12. Устройство мониторинга и диагностики грузового вагона по п. 1, отличающееся тем, что антенны блока GPS/ГЛОНАСС позиционирования и блока связи установлены таким образом, чтобы диаграммы направленности каждой антенны своими максимальными лепестками были направлены между вертикальной и горизонтальной осями.
13. Устройство мониторинга и диагностики грузового вагона по п. 1, отличающееся тем, что блок памяти выполнен с использованием технологии электрически перепрограммируемой памяти в виде микросхемы на базе полупроводниковой технологии.
14. Устройство мониторинга и диагностики грузового вагона по п. 1, отличающееся тем, что на основании данных о местоположении, состоянии грузового вагона удаленным сервером формируются соответствующие отчеты и рассылаются заданным пользователям посредством службы электронной почты или коротких текстовых сообщений в заранее заданное время и/или при превышении соответствующего критического значения параметра, задаваемого для каждого грузового вагона или группы вагонов отдельно.
15. Устройство мониторинга и диагностики грузового вагона по п. 1, отличающееся тем, что содержит нагревательный элемент.
| Устройство мониторинга рельсового транспортного средства | 2018 |
|
RU2721219C2 |
| УСТРОЙСТВО МОНИТОРИНГА РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА И МАГНИТОЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР | 2016 |
|
RU2627959C1 |
| СПОСОБ ЛЕЧЕНИЯ ХРОНИЧЕСКОГО ОСТЕОМИЕЛИТА ДЛИННЫХ КОСТЕЙ КОНЕЧНОСТЕЙ | 2013 |
|
RU2544303C1 |
| Jarillo, J | |||
| M., Moreno, J., и др | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Proceedings of the Institution of Mechanical Engineers, Part F: Journal of Rail and Rapid Transit, | |||

