Изобретение относится к области неразрушающего контроля и может быть использовано на железнодорожном транспорте для контроля состояния рельсового пути.
Известно устройство диагностики и мониторинга состояния пути, содержащее датчики ускорения, расположенные на крышке подшипника колесной пары рельсового транспортного средства, скоростемер, навигационное устройство и устройство сбора данных, предназначенное для обработки, записи и оценки измерительных сигналов датчиков ускорения, скоростемера и навигационного устройства и обеспечения прогнозирования необходимого срока ремонтных работ и соответствующих затрат на ремонтные работы (RU 2349480, В61К 9/08, 27.10.08).
Известное устройство позволяет в автоматическом режиме осуществлять оценку состояния рельсовых стыков и неровностей пути.
Однако оно не обеспечивает необходимую достоверность определения дефектов пути и точность позиционирования, которая зависит о работы навигационного приемника.
В качестве прототипа принято используемое в системе для мониторинга и диагностики состояния рельсового пути (RU2652338, B61K 9/00, 25.04.2018) информационно-измерительное устройство, включающее размещенные в корпусе микропроцессор, модуль навигации, радиомодуль, последовательно соединенные акселерометр и блок обработки, блок памяти в виде SD-карты и источник питания, содержащий аккумуляторную батарею, соединенную через контроллер заряда с выходом магнитоэлектрического генератора, при этом выход микропроцессора подключен к входу радиомодуля, вход/выход - к выходу/входу блока памяти, а соответствующие входы - к выходам модуля навигации и блока обработки, корпус выполнен со съемной крышкой, одна часть которой выполнена из радиопрозрачного материала и скошена под углом к вертикальной оси корпуса, напротив нее размещены антенны модуля навигации и радиомодуля, противоположная крышке сторона корпуса выполнена с отверстиями для крепления корпуса на крышке соответствующего буксового узла колесной пары рельсового транспортного средства и соединения привода магнитоэлектрического генератора с осью колесной пары, причем радиомодуль по радиоканалу связан с сервером центра обработки данных.
К недостатку известного устройства следует отнести недостаточную достоверность определения дефектов пути и точность позиционирования, которая зависит о стабильности приема сигналов от навигационных спутников.
Технический результат изобретения заключается в повышении достоверности определения дефектов пути и в повышении точности определения координат выявляемых дефектов пути.
Технический результат достигается тем, что в бортовое устройство для диагностики состояния рельсового пути, содержащее модуль связи, навигационный модуль и вибродатчик, соединенный через преобразователь входных сигналов с процессором, к которому подключен блок памяти, согласно изобретению введены модуль привязки дефекта с координатой и регистрации, инерциальный модуль позиционирования, модуль памяти с цифровой картой пути, блок корректировки, блок автоматической калибровки, акустический датчик и датчик температуры, при этом модуль памяти с цифровой картой пути соединен с инерциальным модулем позиционирования, с навигационным модулем и модулем привязки дефекта с координатой и регистрации, вход которого соединен с выходом процессора, а выход – подключен ко входу модуля связи, блок корректировки и блок автоматической калибровки соединены с блоком памяти, в который записана база данных дефектов пути и уровня акустического шума, а акустический датчик и датчик температуры подключены к преобразователю входных сигналов.
На чертеже приведена схема бортового устройства для диагностики состояния рельсового пути.
Бортовое устройство для диагностики состояния рельсового пути содержит модуль 1 связи, навигационный модуль 2 и вибродатчик 3, соединенный через преобразователь 4 входных сигналов с процессором 5, к которому подключен блок 6 памяти, модуль 7 привязки дефекта с координатой и регистрации, инерциальный модуль 8 позиционирования, модуль 9 памяти с цифровой картой пути, блок 10 корректировки, блок 11 автоматической калибровки, акустический датчик 12 и датчик 13 температуры, при этом модуль 9 памяти с цифровой картой пути соединен с инерциальным модулем 8 позиционирования, с навигационным модулем 2 и модулем 7 привязки дефекта с координатой и регистрации, вход которого соединен с выходом процессора 5, а выход – подключен ко входу модуля 1 связи, блок 10 корректировки и блок 11 автоматической калибровки соединены с блоком 6 памяти, в который записана база данных дефектов пути и уровня акустического шума, а акустический датчик 12 и датчик 13 температуры подключены к преобразователю 4 входных сигналов.
Бортовое устройство для диагностики состояния рельсового пути работает следующим образом.
Перед началом работы бортовое устройство для диагностики состояния рельсового пути устанавливают на тележке любого вагона транспортного средства, при этом вибродатчик 3, акустический датчик 12 и датчик 13 температуры размещают вблизи контакта системы «колесо - рельс».
В устройстве могут быть использованы измерительные акустические датчики поверхностного типа с чувствительностью не менее 10 мВ/Па, с частотным диапазоном от 5 до 20 кГц, акселерометр для диагностики на основе вибрации чувствительностью не менее 100mV/g, с частотным диапазоном от 0,5 до 10 000 Гц.
При движении рельсового транспортного средства сигналы от вибродатчика 3, акустического датчика 12 и датчика 13 температуры поступают в преобразователь 4 входных сигналов, который преобразует аналоговые сигналы, поступающие от датчиков, в цифровой вид, удобный для их обработки в процессоре 5.
Процессор 5 анализирует входные сигналы, поступающие в цифровом формате с выхода преобразователя 4 входных сигналов, и сравнивает их с информацией из базы данных дефектов пути и уровня акустического шума, которая записана в блоке 6 памяти. Блок 6 памяти содержит информацию о известных дефектах пути, таких как провисание рельса, резкие просадки, отбои рельсовых нитей, резкие углы и извилины в плане, слитые зазоры в стыках, угрожающие выбросом, и растянутые, приводящие к срезу болтов, наличие в рельсах трещин и изломов, закрепление стыковых, клеммных и закладных болтов и шурупов, наличие и состояние противоугонов и костылей, разжижение балластного слоя и основной площадки земляного полотна. Кроме того, в нем содержится информация об уровне «белого шума», т.е. об уровне шума, возникающим во время движении транспортного средства при взаимодействии системы «колесо-рельс».
Все виды дефектов пути подразделяют на четыре степени. Каждому отклонению от нормы содержания пути соответствует определенная степень отступления.
К I степени относятся отступления, не требующие работ по их устранению: фактически это не отступления, а норма (допуск) содержания пути и поэтому при расшифровке они не оцениваются.
Ко II степени относятся отступления, амплитуда которых незначительно ухудшает плавность хода подвижного состава, но также не требует снижения установленной скорости. Однако в зависимости от их количества с учетом оценки состояния колеи определяется необходимость проведения профилактических выправочных работ.
К III степени относятся отступления, уже заметно влияющие на плавность и комфортабельность движения, при не устранении их после обнаружения они могут за относительно короткий период до очередной проверки пути стать причиной интенсивного накопления остаточных деформаций рельсовой колеи и перерасти в отступления более высокой степени, вызывающие ограничение установленной скорости. Поэтому отступления III степени должны устраняться в плановом, но первоочередном порядке (в течение 2-3 дней после прохода устройства диагностирования).
К IV степени относятся отступления, которые создают неблагоприятные условия для взаимодействия пути и подвижного состава и в отдельных случаях могут привести к нарушению безопасности движения. Поэтому любое отступление IV степени, независимо от их количества, требует незамедлительного уменьшении скорости или даже закрытия движения поездов, и естественно безотлагательного выполнения неотложных работ по его (их) устранению.
В случае выявления процессором 5 какого-либо вида дефекта, информация о нем поступает в модуль 7 привязки дефекта с координатой и регистрации. Координата определяется навигационным модулем 2 и инерциальным модулем 8 позиционирования, позволяющим повысить точность измерения, а в случае пропадания сигнала от спутников он является резервным средством для определения координат, т.е. определяет текущее позиционирование по сигналам измерений проекций скорости транспортного средства в системе координат, жестко связанной с транспортным средством, в котором вычисляется модуль его скорости, текущее значение интеграла от которого подвергается функциональным тригонометрическим преобразованиям с промежуточными масштабированием и смещением аргумента, в результате которых формируется первый выходной сигнал вычислителя, соответствующий текущему значению широты, на основании функционального преобразования которого, определяемого функциональной зависимостью географических координат на ортодромии, формируется второй выходной сигнал вычислителя, соответствующий текущему значению долготы транспортного средства.
В модуле 7 осуществляется привязка дефекта пути, выявленного процессором 5, к координате, зафиксированной в момент выявления дефекта инерциальным модулем 8 позиционирования и навигационным модулем 2 (GPS/ГЛОНАСС). Эта координата сравнивается с положением на цифровой карте, записанной в модуле 9 памяти. Модуль 9 памяти содержит информацию о цифровой карте пути, т.е. географическую карту, предназначенную для хранения железнодорожных координат и других свойств железнодорожных объектов (светофоров, станций, мостов, переездов и т.д.), а также географических координат километровых столбов в электронном (кодовом) виде. В карте введена возможная траектория движения транспортного средства, с учетом дифференциальных поправок и разделенная на участки, аппроксимируемые с заданной точностью кратчайшими отрезками траекторий между точками геолокации (ортодромическими отрезками).
Зафиксированные результаты сравнения координаты с положением на цифровой карте регистрируется в модуле 7 и эта информация поступает в модуль 1 связи, осуществляющий ее передачу в диспетчерский центр. Модуль 1 связи входит в систему передачи данных, использующую известные цифровые технологические стандарты радиосвязи, такие как GSM-R, DMR-RUS, LTE и служит для передачи информации о дефектах пути в режиме онлайн в диспетчерский центр и оперативной корректировки скорости движения железнодорожного транспортного средства с целью повышения безопасности движения поездов по проблемному участку для ограничения его скорости движения и предотвращения нежелательных последствий, а также в единую систему управления процессами мониторинга и диагностики технического состояния железнодорожной инфраструктуры для контроля состояния железнодорожной инфраструктуры и планирования ремонта путей по их текущему состоянию.
Во время движения при взаимодействии системы «колесо-рельс» создаются постоянные шумы, определяемые как «белый шум». Эти шумы для работы устройства – незначимы, и по сути являются фоном, уровень которых необходимо определить и учитывать при выявлении дефекта пути. Этот фон постоянно меняется, т.к. зависит от скорости и ускорения движения транспортного средства, а также от температуры внешней среды, т.к. механические свойства материалов меняются при изменении температуры. Также общий фон может меняться от состояния механизмов тележки (износ колесной пары, боковой рамы, надрессорной балки, буксы, тормозной колодки), который также необходимо учитывать при определении уровня шума дефекта. Блок 11 автоматической калибровки на постоянной основе автоматически анализирует внешний фон и определяет уровень «белого шума», который учитывается при определении дефекта пути.
В устройстве предусмотрен блок 10 корректировки, предназначенный для сравнения и добавления в базу данных дефектов пути, т.е. новых шаблонов дефектов, которые в дальнейшем сравниваются процессором 5 с базой имеющихся дефектов пути. В случае определения по шаблону вида дефекта, информация о нем поступает в модуль 7. Если вид дефекта не определен и этот шум отличается от «белого шума», то в базу данных автоматически вносится информация о новом дефекте, таким образом происходит обучение базы данных дефектов пути, когда блок автоматической калибровки выделит новый шум, отличающийся от «белого шума», то блок корректировки записывает его в базу данных, с дальнейшей квалификацией этого дефекта оператором. Оператор экспертным методом назначает этому шуму вид дефекта и вносит в базу данных дефектов пути, либо определяет, что этот вид не является дефектом и определяет его как «белый шум».
Одновременная обработка процессором 5 информации от акустического датчика и вибродатчика позволяет более точно определять тип дефект рельсового пути с идентификацией и классификацией дефекта по шаблонам из базы данных. Информация от датчика температуры в свою очередь позволяет правильно определить уровень «белого шума», возникающего во время движении транспортного средства при взаимодействии системы «колесо-рельс», который создается системой «колесо-рельс» во время движения транспортного средства и имеет различный фон при изменении температуры внешней среды, т.к. механические свойства материалов меняются в разных температурных условиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического торможения подвижного состава по данным высокоточной системы координат | 2015 |
|
RU2611445C1 |
| СПОСОБ ДИАГНОСТИКИ РЕЛЬСОВОГО ПУТИ | 2013 |
|
RU2521095C1 |
| Бортовое устройство позиционирования рельсового транспортного средства | 2023 |
|
RU2799734C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ НА ЦИФРОВОЙ МОДЕЛИ ПУТЕВОГО РАЗВИТИЯ СТАНЦИИ | 2012 |
|
RU2503567C1 |
| Система контроля и диагностики искусственных сооружений | 2019 |
|
RU2717693C1 |
| СПОСОБ ЭКСТРЕННОЙ ДИАГНОСТИКИ ТРУБОПРОВОДОВ ВЫСОКОГО ДАВЛЕНИЯ | 2010 |
|
RU2442072C1 |
| ПОРТАТИВНЫЙ КОМПЛЕКС ВОЗДУШНОГО БАЗИРОВАНИЯ ОПТИКО-ВИЗУАЛЬНОГО МОНИТОРИНГА | 2006 |
|
RU2320519C1 |
| УСТРОЙСТВО ДЛЯ ОПЕРАТИВНОЙ ДИАГНОСТИКИ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА | 2010 |
|
RU2439550C1 |
| Бортовая информационная система | 2020 |
|
RU2742960C1 |
| Устройство мониторинга и диагностики грузового вагона | 2020 |
|
RU2745168C1 |

Изобретение относится к области неразрушающего контроля и может быть использовано на железнодорожном транспорте для контроля состояния рельсового пути. Бортовое устройство для диагностики состояния рельсового пути содержит модуль связи, навигационный модуль и вибродатчик, соединенный через преобразователь входных сигналов с процессором, к которому подключен блок памяти, модуль привязки дефекта с координатой и регистрации, инерциальный модуль позиционирования, модуль памяти с цифровой картой пути, блок корректировки, блок автоматической калибровки, акустический датчик и датчик температуры. При этом модуль памяти с цифровой картой пути соединен с инерциальным модулем позиционирования, с навигационным модулем и модулем привязки дефекта с координатой и регистрации, вход которого соединен с выходом процессора, а выход – подключен к входу модуля связи. Блок корректировки и блок автоматической калибровки соединены с блоком памяти, в который записана база данных дефектов пути и уровня акустического шума. Акустический датчик и датчик температуры подключены к преобразователю входных сигналов. В результате повышаются достоверность определения дефектов пути и точность определения координат выявляемых дефектов пути. 1 ил.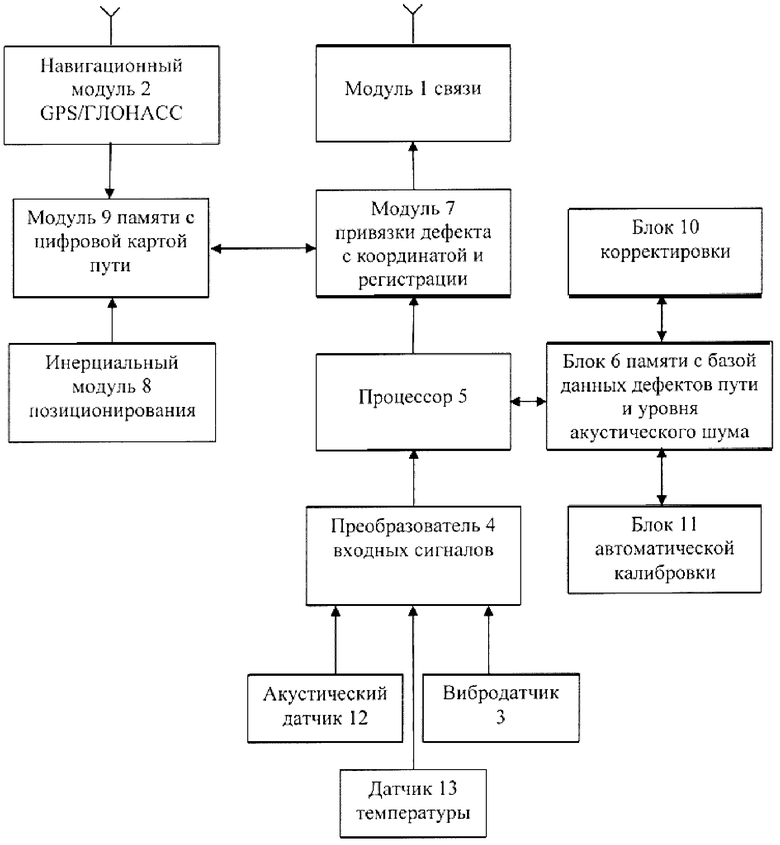
Бортовое устройство для диагностики состояния рельсового пути, содержащее модуль связи, навигационный модуль и вибродатчик, соединенный через преобразователь входных сигналов с процессором, к которому подключен блок памяти, отличающееся тем, что в него введены модуль привязки дефекта с координатой и регистрации, инерциальный модуль позиционирования, модуль памяти с цифровой картой пути, блок корректировки, блок автоматической калибровки, акустический датчик и датчик температуры, при этом модуль памяти с цифровой картой пути соединен с инерциальным модулем позиционирования, с навигационным модулем и модулем привязки дефекта с координатой и регистрации, вход которого соединен с выходом процессора, а выход – подключен к входу модуля связи, блок корректировки и блок автоматической калибровки соединены с блоком памяти, в который записана база данных дефектов пути и уровня акустического шума, а акустический датчик и датчик температуры подключены к преобразователю входных сигналов.
| Система для мониторинга и контроля состояния рельсового пути | 2017 |
|
RU2652338C1 |
| СПОСОБ И УСТРОЙСТВО ДИАГНОСТИКИ И МОНИТОРИНГА СОСТОЯНИЯ СТРЕЛОК, ПЕРЕСЕЧЕНИЙ, СТРЕЛОЧНЫХ ПЕРЕВОДОВ ИЛИ РЕЛЬСОВЫХ СТЫКОВ | 2005 |
|
RU2349480C2 |
| Система распределенного контроля железнодорожного пути для высокоскоростного движения | 2017 |
|
RU2671796C1 |
| EP 3138753 A1, 08.03.2017. | |||

