Группа изобретений относится к измерительной технике и может быть использована на железнодорожном транспорте для контроля состояния ответственных элементов и узлов рельсового транспортного средства с возможностью отслеживания его местоположения в пределах железнодорожной транспортной сети при использовании автономного источника питании.
Собственники железнодорожного подвижного состава тратят значительные ресурсы и денежные средства на устранение поломок рельсового транспортного средства, не имеющего энергетической установки и бортовой электросети (грузовые вагоны, путевые машины и др.). Одна из причин данного факта - отсутствие возможности автономного мониторинга ответственных элементов и узлов рельсового транспортного средства в режиме реального времени. Кроме того, собственники подвижного состава и железнодорожные грузоотправители нуждаются в возможности слежения за местоположением грузовых вагонов в пределах железнодорожной транспортной сети. Усовершенствование в управлении цепочкой поставки и повышение требований к безопасности усилили потребность в отслеживании грузовых вагонов в любые моменты времени, находится ли вагон в неподвижном состоянии в железнодорожном отстойнике, на запасных путях или перемещается локомотивом по железнодорожной сети.
Известно устройство автоматической идентификации бортового номера и местонахождения железнодорожного вагона, содержащее блок регистратора, в состав которого входят процессор архитектуры ARM, GSM-модем, GPS-приемник и FLASH-память, подключенные к блоку питания, при этом GSM-модем подключен к внешней антенне GSM и к процессору архитектуры ARM, GPS-приемник подключен к внешней антенне ГЛОНАСС/GPS и к процессору архитектуры ARM, FLASH-память подключена к процессору ARM, процессор ARM выполнен с возможностью формирования информационного сигнала, содержащего номер вагона и географическое место нахождения вагона, а также с возможностью задания времени передачи информационного сигнала, а блок питания выполнен в виде аккумулятора или бортовой сети вагона (RU 127026 U1, B61L 25/00, 20.04.2013 г.).
Известное устройство позволяет в автоматическом режиме отслеживать местоположение пассажирского вагона за счет передачи в диспетчерский центр в автоматическом режиме идентификационных данных вагона и данных о его местоположении.
Однако для его работы необходимо либо наличие бортовой сети, что невыполнимо для подавляющего большинства грузовых вагонов, либо наличие автономного источника питания в виде аккумулятора.
Наиболее близким аналогом в части объекта изобретения устройство является устройство для мониторинга состояния букс колесных пар вагонов движущегося поезда, содержащее установленные на каждой буксе датчики измерения параметров состояния элементов конструкции буксы, микропроцессор обработки измерительной информации, активный приемопередатчик информации о состоянии буксы по радиоканалу, магнитоэлектрический генератор, состоящий из диска с магнитными элементами, закрепленного на торцевой поверхности оси колесной пары, и витков электрических проводников, размещенных неподвижно под крышкой буксы и подключенных через диодные выпрямители и аккумуляторы электрической энергии к клеммам питания датчиков, микропроцессора и приемопередатчика, причем информационные выходы датчиков и информационные входы приемопередатчика взаимосвязаны через соответствующие входные и выходные шины микропроцессора (RU 2381935 C1, B61K 9/04, 20.10.2010 г).
Известное устройство обеспечивает мониторинг состояния только букс колесных пар вагона подвижного состава в режиме реального времени с возможностью передачи данных о результатах мониторинга заинтересованным лицам. При этом в качестве источника питания в известном устройстве используют автономный источник питания в виде магнитоэлектрического генератора.
Однако известное устройство не позволяет отслеживать местоположение рельсового транспортного средства и контролировать основные параметры других ответственных элементов и узлов рельсового транспортного средства, а используемый магнитоэлектрический генератор не обеспечивает требуемые энергетические характеристики при скорости движения рельсового транспортного средства 4-8 км/ч.
Известен магнитоэлектрический генератор, используемый в качестве автономного источника питания для грузового вагона, состоящего из статора и выпрямительно-стабилизирующего устройства, неподвижно закрепленных с внутренней стороны крышки буксы, и подвижного ротора, при этом постоянные магниты и катушки совмещены и размещены неподвижно в статоре, а ротором служит торцевая часть оси колесной пары вагона с конструктивными выступами (RU 82953 U1, Н02К 21/24, 10.05.2009 г.).
Конструкция известного магнитоэлектрического генератора не требует крепления каких-либо элементов на торцевой части оси колесной пары вагона и связанных с этим изменений конструкции оси колесной пары и технологии его обслуживания. Однако такой генератор не позволяет обеспечить требуемые энергетические показатели (мощность, сила тока, напряжение) при низких частотах вращения ротора 1-2 об/с.
Наиболее близким аналогом в части объекта изобретения генератор является магнитоэлектрический генератор, используемый в качестве автономного источника питания устройства для мониторинга состояния букс колесных пар вагонов движущегося поезда (RU 2381935 C1, В61К 9/04, 20.02.2010 г.).
Известный магнитоэлектрический генератор, состоит из диска с магнитными элементами, закрепленного на торцевой поверхности оси колесной пары, и витков электрических проводников, размещенных неподвижно под крышкой буксы, диодных выпрямителей и аккумуляторов электрической энергии. При этом дисковый магнитопровод диаметром, равным диаметру торцевой поверхности оси колесной пары, установлен на многослойном коммутационном основании со стороны крышки буксы соосно с осью вращения колес, четное число магнитов в виде плоских параллелепипедов с намагниченными основаниями установлены на диске радиально и равномерно по линии окружности вокруг оси вращения колесной пары и ориентированы перпендикулярно к поверхности многослойного коммутационного основания поочередно разноименными полюсами. Наименьшее расстояние между боковыми поверхностями магнитов превышает, по меньшей мере, в два раза величину зазора между торцами магнитов и поверхностью многослойного коммутационного основания. В многослойном коммутационном основании выполнены отверстия в количестве, равном числу магнитов, по форме и размерам соответствующие их поперечному сечению и расположенные на многослойном коммутационном основании радиально и равномерно по линии окружности вокруг оси вращения колесной пары. Взаимное расположение отверстий и магнитов установлено соосным. При этом вокруг каждого из отверстий в каждом из слоев многослойного коммутационного основания выполнены витки печатных электрических проводников, концентрически уложенных в слоях по спирали и последовательно соединенных между собой по слоям. Причем направления укладки печатных проводников в спиралях нечетных слоев и четных слоев многослойного коммутационного основания установлены взаимно противоположными. В дополнительном дисковом магнитопроводе выполнены выдавки, соответствующие по количеству, форме боковых поверхностей и взаимному месторасположению числу, форме и месторасположению отверстий в многослойном коммутационном основании, а глубина выдавок по меньшей мере равна толщине многослойного коммутационного основания. Многослойное коммутационное основание, включая витки электрических проводников спиралей, выполнено по технологии многослойных печатных плат с металлизацией межслойных переходных отверстий. Диск для размещения магнитов и дополнительный дисковый магнитопровод выполнены из листовой электротехнической стали.
Недостатком известного магнитоэлектрического генератора является сложность его конструкции, а также отсутствие возможности обеспечивать требуемые энергетические показатели (мощность, напряжение, сила тока) при скорости движения рельсового транспортного средства 4-8 км/ч.
Технический результат в части объекта изобретения магнитоэлектрический генератор заключается в упрощении конструкции и в повышении эффективности генератора за счет обеспечения высоких энергетических показателей генератора при низких скоростях вращения ротора.
Технический результат достигается тем, что магнитоэлектрический генератор содержит ротор в виде вала с напрессованными ступицей и пакетом, выполненным шихтованным с пазами, открытыми в сторону ступицы, в которых установлены постоянные магниты с осевой намагниченностью и чередующейся полярностью, магниты выполнены из материала на основе сплава неодим-железо-бор, статор, выполненный шихтованным из листовой стали с зубцами, на которых размещены катушки фазных обмоток, соединенных в фазе последовательно, и блок регулирования, при этом ротор установлен в подшипниках, передний и задний подшипниковые щиты выполнены с замковыми расточками для соединения с пакетом статора и соответственно с передним и задним подшипником, а также друг с другом, причем зазор между ротором и статором составляет не более 0,3-1 мм, выводные концы фазных обмоток подключены к соответствующим входам блока регулирования.
Для обеспечения оптимальных значений электрических параметров генератора и эффективности его работы ротор выполняют с пазами в количестве не более 24, но не менее 14, а статор с зубцами, количество которых на две единицы меньше, чем количество пазов ротора.
Блок регулирования может включать последовательно соединенные выпрямитель и блок управления и контроля, при этом входы выпрямителя являются входами блока регулирования, а выход и вход/выход блока управления и контроля - выходом и выходом/входом блока регулирования.
Внешняя поверхность подшипниковых щитов может содержать установочные места для крепления элементов блока регулирования напряжения.
Технический результат в части устройства для мониторинга рельсового транспортного средства заключается в расширении функциональных возможностей за счет надежного мониторинга различных технико-технологических параметров и узлов рельсового транспортного средства при различных скоростях его движения, а также отслеживания его местонахождения в режиме реального времени.
Технический результат достигается тем, что устройство мониторинга рельсового транспортного средства содержит установленные в корпусе процессор, модуль спутниковой системы навигации, модуль GSM, блок памяти, последовательно соединенные датчик ускорения и блок обработки диагностических данных, блок управления и источник питания, при этом первый вход процессора подключен к выходу модуля спутниковой системы навигации, второй вход - к выходу блока обработки диагностических данных, выход - к входу модуля GSM, а выход/вход - к входу/выходу блока памяти, источник питания включает аккумуляторную батарею с контроллером заряда и предлагаемый магнитоэлектрический генератор, выход блока регулирования которого подключен к входу блока управления, соединенного выходом с входами питания модуля спутниковой системы навигации, модуля GSM, микропроцессора, блока памяти и блока обработки диагностических данных, а входом/выходом - к выходу/входу аккумуляторной батареи с контроллером заряда, корпус выполнен со съемной крышкой, одна часть которой выполнена из радиопрозрачного материала и скошена под углом не более 70 градусов к вертикальной оси корпуса, напротив нее размещены антенны модуля спутниковой системы навигации и модуля GSM, противоположная крышке сторона корпуса является его основанием, в котором выполнены соответствующие отверстия для крепления переднего подшипникового щита к основанию корпуса, для установки и фиксации основания корпуса на крепительной крышке буксового узла и для соединения вала ротора генератора посредством муфты с осью колесной пары.
Для измерения температуры букс устройство может включать датчики температуры, один из которых установлен внутри корпуса, а другой на его внешней стороне, при этом выходы датчиков температуры подключены к соответствующим входам блока обработки диагностических данных.
В одном из вариантов устройство может включать приемопередающее устройство, установленное в корпусе, и блоки контроля состояния основных узлов рельсового транспортного средства, каждый из которых включает последовательно соединенные соответствующий измерительный датчик и блок обработки данных, приемопередатчик, входом/выходом соединенный с выходом/входом блока обработки данных, и автономный источник питания, при этом приемопередающее устройство посредством канала радиосвязи подключено к приемопередатчикам блоков контроля состояния основных узлов рельсового транспортного средства, а выходом/входом - ко второму входу/выходу процессора, причем антенна приемопередающего устройства расположена напротив части крышки корпуса, выполненной из радиопрозрачного материала.
В одном из вариантов выполнения муфта выполнена из двух полумуфт, одна из которых ведущая закреплена на оси колесной пары, а другая ведомая - на валу ротора генератора, между ними установлена прокладка из резины.
В другом варианте - муфта выполнена из ведущей и ведомой полумуфт с постоянными магнитами, ведущая полумуфта крепится на оси колесной пары, а ведомая - на валу ротора генератора.
Существо предложения поясняется чертежами на фиг. 1-3.
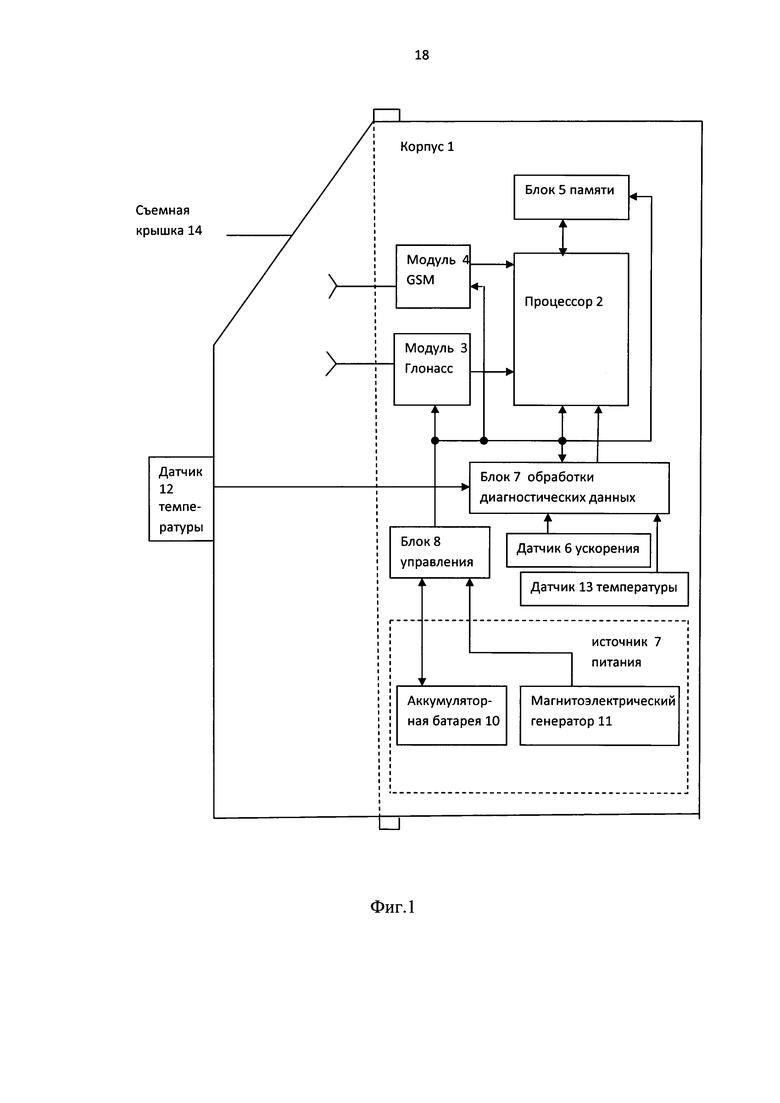
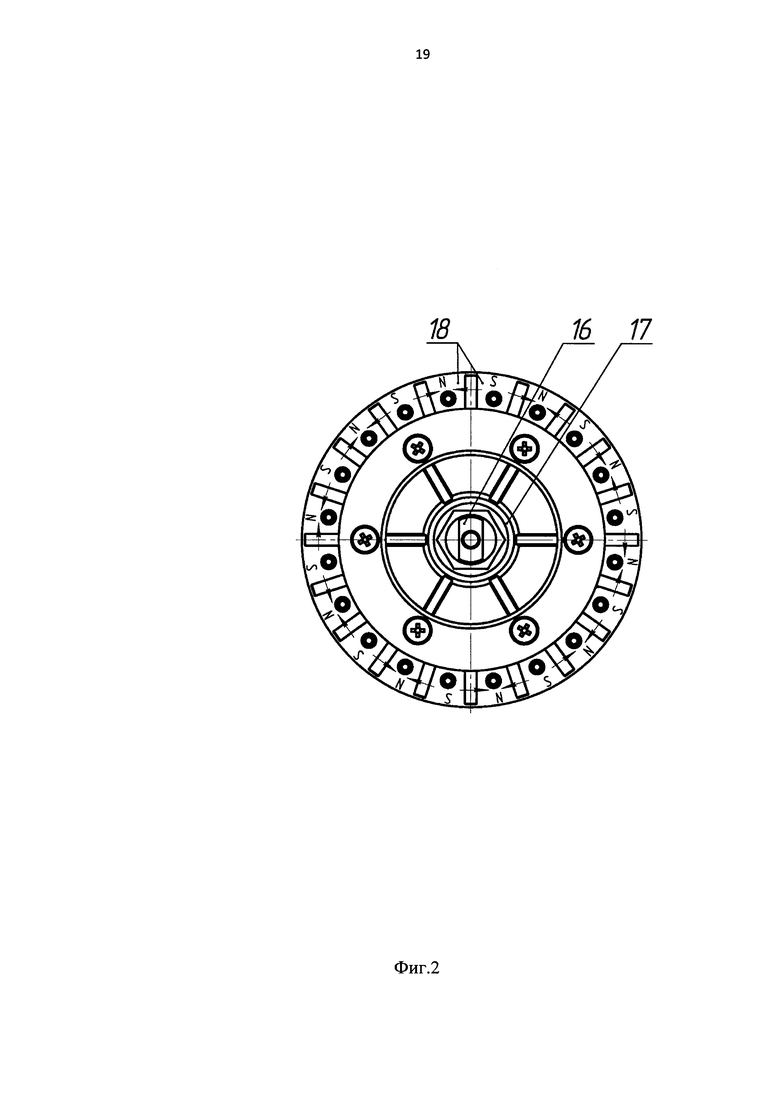
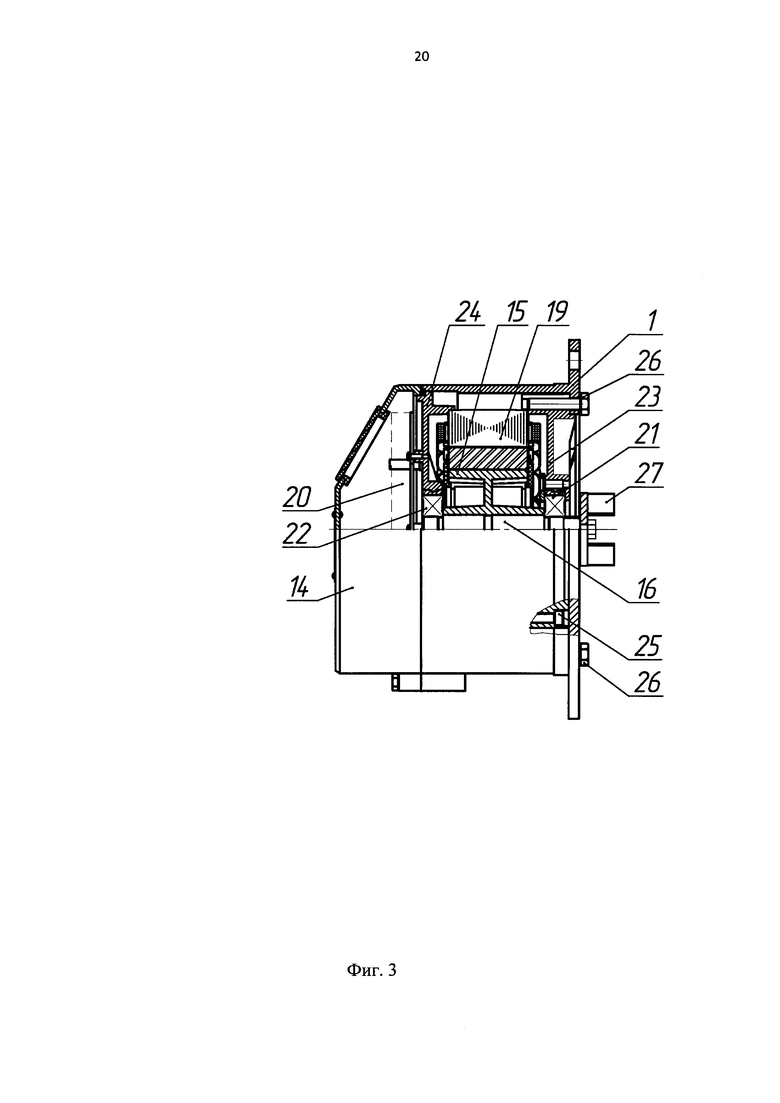
На фиг. 1 представлена структурная схема варианта выполнения устройства мониторинга рельсового транспортного средства, на фиг. 2 - разрез А-А ротора, на фиг. 3 - конструкция устройства мониторинга железнодорожного вагона.
Устройство мониторинга рельсового транспортного средства содержит установленные в корпусе 1 процессор 2, модуль 3 спутниковой системы навигации, модуль 4 GSM, блок 5 памяти, последовательно соединенные датчик 6 ускорения и блок 7 обработки диагностических данных, блок 8 управления и источник 9 питания
Первый вход процессора 2 подключен к выходу модуля 3 спутниковой системы навигации, второй - к выходу блока 7 обработки диагностических данных, выход - к входу модуля 4 GSM, а выход/вход - к входу/выходу блока 5 памяти.
Источник 9 питания включает аккумуляторную батарею 10 с контроллером заряда и магнитоэлектрический генератор 11.
Устройство включает также датчики 12 и 13 температуры, один из которых установлен внутри корпуса 1, а другой на его внешней стороне, при этом выходы датчиков 12 и 13 температуры подключены к соответствующим входам блока 7 обработки диагностических данных.
Корпус 1 выполнен со съемной крышкой 14, одна часть которой выполнена из радиопрозрачного материала и скошена под углом не более 70° к вертикальной оси корпуса 1, напротив нее размещены антенны модуля 3 спутниковой системы навигации и модуля 4 GSM. Модуль 3 спутниковой системы навигации выполнен в виде модуля ГЛОНАСС или модуля GPS или модуля ГЛОНАСС/GPS.
Магнитоэлектрический генератор 11 содержит ротор 15 (фиг. 2) в виде вала 16 с напрессованными алюминиевой ступицей 17 и пакетом, выполненным шихтованным из листовой стали с пазами, открытыми в сторону ступицы, в которых установлены постоянные магниты 18 с осевой намагниченностью и чередующейся полярностью, статор 19, выполненный шихтованным из листовой стали с радиально расположенными зубцами, на которых установлены катушки фазных обмоток, соединенных в фазе последовательно (на чертеже не показаны), и блок 20 регулирования.
Магниты 18 выполнены из материала на основе сплава неодим-железо-бор.
Ротор 15 установлен в подшипниках 21 и 22. Передний подшипниковый щит 23 представляет собой деталь с расточками для соединения с пакетом статора 19 и подшипником 21. Задний подшипниковый щит 24 представляет собой деталь с расточками для соединения с пакетом статора 19 и подшипником 22. Внешняя поверхность подшипникового щита 24 выполнена с установочными местами для крепления блока 20 регулирования.
Подшипниковые щиты 23 и 24 и пакет статора 19 сочлены между собой через замковые расточки и стянуты винтами 25.
Противоположная крышке 12 сторона корпуса 1 является его основанием. Основание корпуса 1 выполнено с отверстиями для болтового крепления 26 переднего подшипникового щита 23 к основанию корпуса 1, для установки и фиксации основания корпуса 1 на крепительной крышке буксового узла в посадочном месте смотровой крышки и для соединения вала 16 ротора 15 генератора 11 посредством муфты (на чертеже показана часть муфты 27) с осью колесной пары.
Корпус 1 выполнен герметичным для защиты элементов устройства от проникновения посторонних предметов и влаги.
При этом выводные концы фазных обмоток подключены к соответствующим входам блока 20 регулирования, зазор между ротором 14 и статором 18 составляет не более 0,3-1 мм, а магниты 17 выполнены из материала на основе сплава неодим-железо-бор.
Блок 19 регулировки выходом подключен к входу блока 6 управления, выходом соединенный к входам питания модуля 3 спутниковой системы навигации, модуля 4 GSM, центрального процессора 2 и блока 5 памяти, а входом/выходом - к выходу/входу аккумуляторной батареи 7 с контроллером заряда.
Муфта выполнена из двух стальных полумуфт 27, одна из которых ведущая крепится посредством штатных болтов на торце тарельчатой шайбы оси колесной пары, а другая - на валу ротора генератора, между рабочими поверхностями полумуфт установлена прокладка-буфер из плотной технической резины (на чертеже не показано). Прокладка участвует в передаче усилий между рабочими поверхностями полумуфт, входящих в зацепление при передаче крутящего момента от оси колесной пары к ротору 15 генератора 11.
Процессор 2, модуль 3 спутниковой системы навигации, модуль 4 GSM, блок 5 памяти, блок 6 управления и блок 7 обработки диагностических данных размещены на отдельной плате. Плата размещена в установочном месте подшипникового щита 24 над блоком 20 регулирования. Причем предварительно перед установкой устройства на буксовый узел рельсового транспортного средства в операционную память процессора 2 введены идентификационный номер рельсового транспортного средства и программа передачи данных диагностических параметров и данных о местоположении вагона.
Устройство мониторинга рельсового транспортного средства работает следующим образом.
При движении железнодорожного вагона ротор 15 генератора 11 вращается с частотой вращения колесной пары и создает вращающееся магнитное поле, наводящее в фазных обмотках катушек статора 19 переменную ЭДС.
Крутящий момент от оси колесной пары передается к ротору 15 генератора 11 посредством муфты. Конструкция муфты позволяет уменьшить влияние как продольного смещения оси колесной пары до 6 мм, так и отклонения соосности полумуфт, а, следовательно, обеспечивает снижение вероятности выхода из строя генератора 11 в случае его заклинивания.
Рабочий зазор (воздушный) между статором 19 и ротором 14 составляет 0,1-0,3 мм, что позволяет максимально увеличить ЭДС индукции в обмотках катушек статора 19.
Кроме того, применение постоянных магнитов из материала на основе сплава неодим-железо-бор существенно улучшает электрические характеристики генератора и позволяет уменьшить его массогабаритные параметры. Достоинством постоянных магнитов из материала на основе сплава неодим-железо-бор являются высокие значения остаточной индукции и коэрцитивной силы.
Стабилизацию выходного напряжения генератора 11 обеспечивает блок 20 регулирования. Блок 20 преобразует трехфазное переменное напряжение с выхода фазных обмоток катушек статора 19 в постоянный ток, а также отключает подачу питающего тока на вход блока 8 управления, когда вырабатывается излишняя энергия. Вырабатываемая генератором 11 мощность зависит от частоты вращения оси колесной пары вагона. При скорости движения 5 км/ч мощность генератора 11 составляет не менее 8 Вт, а при скорости 110 км/ч - не менее 40 Вт, что позволяет использовать его в качестве источника питания различных маломощных потребителей.
Выполнение ротора 15 с пазами в количестве не более 24, но не менее 14, а статора 19 с зубцами, количество которых на две единицы меньше, чем количество пазов ротора 15, позволяет достичь оптимальных значений электрических параметров генерируемого электрического тока при ограниченных геометрических размерах и низких частотах вращения ротора 1-2 об/с (т.е. на малых скоростях движения рельсового транспортного средства).
Контроллер заряда аккумуляторной батареи 10 осуществляет постоянный контроль ее емкости и при недостаточной емкости подает соответствующий сигнал в блок 8 управления, который осуществляет подзарядку емкости аккумуляторной батареи 10 от магнитоэлектрического генератора 11.
При активизировании рабочего режима генератора 11 модуль 3 спутниковой системы навигации в режиме реального времени определяет местоположение вагона в зоне действия и направляет эти данные в процессор 2.
Кроме того, одновременно датчик 6 измеряет ускорение транспортного средства, датчик 13 - температуру буксы, а датчик 12 - температуру воздуха внешней среды. Результаты измерений датчики 6, 12 и 13 направляют в блок 7, который осуществляет соответствующую обработку полученных данных.
Процессор 2 в соответствии с заданной программой запрашивает блок 7 о результатах измерений и по получении данных формирует сообщение в режиме реального времени, включающее информацию об идентификационном номере рельсового транспортного средства, диагностические данные и данные о местонахождении рельсового транспортного средства. Сформированное сообщение процессор 2 направляет в модуль 4 GSM.
При установлении канала связи модуль 4 GSM передает сообщение на сервер центра сбора и обработки данных. В случае отсутствия сети модуль 4 GSM информирует об этом процессор 2. В этом случае процессор 2 направляет сформированное сообщение в блок 5 памяти. При установлении канала связи процессор 2 сохраненное сообщение направляет в модуль 4 GSM для последующей передачи на сервер центра сбора и обработки данных.
Во время остановки рельсового транспортного средства магнитоэлектрический генератор 11 находится в нерабочем состоянии.
При отсутствии тока с выхода генератора 11 блок 8 управления подключает к питающим входам элементов устройства аккумуляторную батарею. Процесс передачи данных о местонахождении рельсового транспортного средства при этом не прекращается и будет продолжаться до тех пор, пока не закончится заряд аккумуляторной батареи 10.
Предлагаемое устройство мониторинга рельсового транспортного средства может включать приемопередающее устройство, установленное в корпусе, и блоки контроля технико-технологических параметров основных узлов рельсового транспортного средства таких, как гидропривода, двигателя, рабочих органов и т.д., причем антенна приемопередающего устройства расположена напротив части крышки 12, выполненной из радиопрозрачного материала.
Каждый блок контроля технико-технологических параметров основных узлов рельсового транспортного средства содержит последовательно соединенные соответствующий измерительный датчик и блок обработки данных, приемопередатчик, входом/выходом соединенный с выходом/входом блока обработки данных, и автономный источник питания, при этом приемопередающее устройство посредством канала радиосвязи подключено к приемопередатчикам блоков контроля технико-технологических параметров узлов рельсового транспортного средства, а выходом/входом - ко второму входу/выходу процессора 2.
В каждом блоке контроля технико-технологических параметров основных узлов рельсового транспортного средства информационные данные с выхода датчика в режиме реального времени поступают в блок обработки, который осуществляет предварительную обработку данных и хранение.
Процессор 2 в соответствии с заданной программой через приемопередающее устройство направляет в приемопередатчик каждого блока контроля соответствующий запрос.
На основании полученного запроса блок обработки направляет результаты измерений в приемопередатчик для передачи в приемопередающее устройство. Приемопередающее устройство направляет полученные данные в процессор 2, который формирует сообщение с учетом данных результатов всех измерений и через модуль 4 GSM передает его на сервер центра сбора и обработки данных.
Таким образом, устройство для мониторинга рельсового транспортного средства в режиме реального времени обеспечивает мониторинг рельсового транспортного средства при различных скоростях его движения, а также местонахождение рельсового транспортного средства с возможностью передачи данных мониторинга заинтересованным лицами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство мониторинга рельсового транспортного средства | 2018 |
|
RU2721219C2 |
| Устройство мониторинга и диагностики грузового вагона | 2020 |
|
RU2745168C1 |
| Бортовое устройство для диагностики состояния рельсового пути | 2019 |
|
RU2704692C1 |
| СИСТЕМА МОНИТОРИНГА ЭЛЕКТРОПОЕЗДОВ | 2008 |
|
RU2386563C1 |
| Система для мониторинга и контроля состояния рельсового пути | 2017 |
|
RU2652338C1 |
| СИСТЕМА МОНИТОРИНГА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2022 |
|
RU2800560C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА МОНИТОРИНГА ПЕРЕВОЗОК ГРУЗОВ ЖЕЛЕЗНОДОРОЖНЫМ ТРАНСПОРТОМ | 2010 |
|
RU2466460C2 |
| СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ СОСТОЯНИЯ И МЕСТОНАХОЖДЕНИЯ НЕСАМОХОДНОГО РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2007 |
|
RU2373094C2 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ СВОБОДНОСТИ УЧАСТКОВ ПУТИ ОТ ПОДВИЖНОГО СОСТАВА | 2015 |
|
RU2600175C1 |
| Система распределенного контроля железнодорожного пути для высокоскоростного движения | 2017 |
|
RU2671796C1 |
Изобретения относятся к области автоматики и телемеханики на железнодорожном транспорте. Устройство содержит установленные в корпусе процессор, модуль спутниковой системы навигации, модуль GSM, блок памяти, последовательно соединенные датчик ускорения и блок обработки диагностических данных, блок управления, центральный процессор, источник питания, включающий аккумуляторную батарею с контроллером заряда и магнитоэлектрический генератор. Причем корпус выполнен со съемной крышкой, одна часть которой выполнена из радиопрозрачного материала и скошена под углом не более 70 градусов к вертикальной оси корпуса, напротив нее размещены антенны модуля спутниковой системы навигации и модуля GSM, противоположная крышке сторона корпуса является его основанием, в котором выполнены отверстия соответственно для крепления переднего подшипникового щита к основанию корпуса, для установки и фиксации основания корпуса на крепительной крышке буксового узла и для соединения вала ротора генератора посредством соответствующей муфты с осью колесной пары. Достигается повышение эффективности генератора, а также расширение функциональных возможностей устройства. 2 н. и 7 з.п. ф-лы, 3 ил.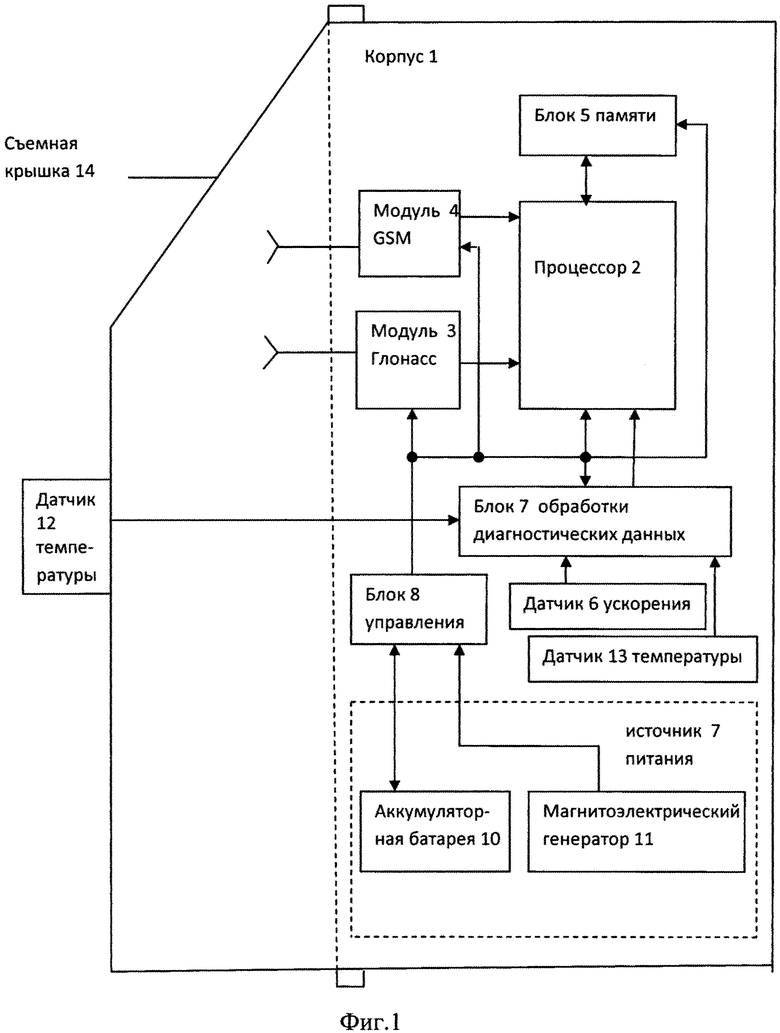
1. Магнитоэлектрический генератор, содержащий ротор в виде вала с напрессованными ступицей и пакетом, выполненным шихтованным с пазами, открытыми в сторону ступицы, в которых установлены постоянные магниты с осевой намагниченностью и чередующейся полярностью, магниты выполнены из материала на основе сплава неодим-железо-бор, статор, выполненный шихтованным из листовой стали с зубцами, на которых размещены катушки фазных обмоток, соединенных в фазе последовательно, и блок регулирования, при этом ротор установлен в подшипниках, передний и задний подшипниковые щиты выполнены с замковыми расточками для соединения с пакетом статора и соответственно с передним и задним подшипником, а также друг с другом, причем зазор между ротором и статором составляет не более 0,3-1 мм, выводные концы фазных обмоток подключены к соответствующим входам блока регулирования.
2. Магнитоэлектрический генератор по п. 1, отличающийся тем, что ротор выполнен с пазами в количестве не более 24, но не менее 14, а статор с зубцами, количество которых на две единицы меньше, чем количество пазов ротора.
3. Магнитоэлектрический генератор по п. 2, отличающийся тем, что блок регулирования включает последовательно соединенные выпрямитель и блок управления и контроля, при этом входы выпрямителя являются входами блока регулирования, а выход и вход/выход блока управления и контроля - выходом и выходом/входом блока регулирования.
4. Магнитоэлектрический генератор по п. 3, отличающийся тем, что внешняя поверхность подшипниковых щитов содержит установочные места для крепления элементов блока регулирования.
5. Устройство мониторинга рельсового транспортного средства, содержащее установленные в корпусе процессор, модуль спутниковой системы навигации, модуль GSM, блок памяти, последовательно соединенные датчик ускорения и блок обработки диагностических данных, блок управления и источник питания, при этом первый вход процессора подключен к выходу модуля спутниковой системы навигации, второй вход - к выходу блока обработки диагностических данных, выход - к входу модуля GSM, а выход/вход - к входу/выходу блока памяти, источник питания включает аккумуляторную батарею с контроллером заряда и магнитоэлектрический генератор по любому из пунктов 1-5, выход блока регулирования которого подключен к входу блока управления, выходом соединенного с входами питания модуля спутниковой системы навигации, модуля GSM, центрального процессора, блока памяти и блока обработки диагностических данных, а входом/выходом - к выходу/входу аккумуляторной батареи с контроллером заряда, корпус выполнен со съемной крышкой, одна часть которой выполнена из радиопрозрачного материала и скошена под углом не более 70 градусов к вертикальной оси корпуса, напротив нее размещены антенны модуля спутниковой системы навигации и модуля GSM, противоположная крышке сторона корпуса является его основанием, в котором выполнены отверстия соответственно для крепления переднего подшипникового щита к основанию корпуса, для установки и фиксации основания корпуса на крепительной крышке буксового узла и для соединения вала ротора генератора посредством соответствующей муфты с осью колесной пары.
6. Устройство по п. 5, отличающееся тем, что включает датчики температуры, один из которых установлен внутри корпуса, а другой на его внешней стороне, при этом выходы датчиков температуры подключены к соответствующим входам блока обработки диагностических данных.
7. Устройство по п. 6, отличающееся тем, что введены установленное в корпусе приемопередающее устройство и блоки контроля технико-технологических параметров основных узлов рельсового транспортного средства, каждый из которых включает последовательно соединенные соответствующий измерительный датчик и блок обработки данных, приемопередатчик, входом/выходом соединенный с выходом/входом блока обработки данных, и автономный источник питания, при этом приемопередающее устройство посредством канала радиосвязи подключено к приемопередатчикам блоков контроля состояния основных узлов рельсового транспортного средства, а выходом/входом - ко второму входу/выходу процессора, причем антенна приемопередающего устройства расположена напротив части крышки из радиопрозрачного материала.
8. Устройство по любому из пп. 5-7, отличающееся тем, что муфта выполнена из двух полумуфт, одна из которых - ведущая - закреплена на оси колесной пары, а другая - ведомая - на валу ротора генератора, между ними установлена прокладка из резины.
9. Устройство по любому из пп. 5-7, отличающееся тем, что муфта выполнена из ведущей и ведомой полумуфт с постоянными магнитами, ведущая полумуфта крепится на оси колесной пары, а ведомая - на валу ротора генератора.
| ЭЛЕКТРОМАШИНА | 2013 |
|
RU2541356C1 |
| УСТРОЙСТВО ДЛЯ МОНИТОРИНГА СОСТОЯНИЯ БУКС КОЛЕСНЫХ ПАР ВАГОНОВ ДВИЖУЩЕГОСЯ ПОЕЗДА | 2008 |
|
RU2381935C1 |
| Ротор электрической машины | 1983 |
|
SU1098070A1 |
| JP 2003049859 A, 21.02.2003. | |||

