Настоящее изобретение относится к медицинскому инструменту и, соответственно, к ручному инструменту, такому как зажим, щипцы или любой другой ручной инструмент типа ножниц, содержащему первый ручной рычаг, который имеет участок захвата, предусмотренный для приведения в действие вручную на своем ближнем конце, рабочий участок, например, в виде бранши, служащий для захватывания, зажимания или обрезания объекта на своем дальнем конце, и лежащий между ними опорный участок, на котором опорный элемент контактирует таким образом, чтобы обеспечить возможность поворота вокруг оси вращения, находящейся между первым ручным рычагом и вторым ручным рычагом, при этом второй ручной рычаг имеет участок захвата на своем ближнем конце, рабочий участок – на своем дальнем конце и лежащий между ними направляющий участок, на котором контактирует опорный элемент, при этом направляющий участок второго ручного рычага на одной стороне имеет вставочное углубление, служащее для приема опорного участка первого ручного рычага таким образом, чтобы два направляющих выступа, расположенных на удалении и вблизи от вставочного углубления, по меньшей мере, частично охватывали опорный участок в рабочем положении, в котором происходит захватывание, зажимание или обрезание.
Из патента DE 20 2013 010 321 U1 известен медицинский инструмент типа щипцов, который состоит из первого ручного рычага, включающего направляющую пластину, и второго ручного рычага, включающего опорную пластину, которые соединены друг с другом с возможностью поворота посредством опорного подшипника, расположенного в области направляющей пластины, и опорной пластины, и у которого предусмотрена радиально расширенная рабочая часть, причем опорная пластина образует на каждом из своих торцевых участков с продольных сторон приемную канавку, в которой контактирует направляющая пластина в своем рабочем положении, при этом опорная пластина включает, между приемными канавками, углубление, проходящее по всей ширине опорной пластины, и направляющая пластина выполнена с возможностью поворота относительно опорной пластины из своего рабочего положения в положение для очистки, в котором направляющая пластина стремиться перекрыть углубление, и в области углубления между направляющей пластиной и опорной пластиной предусмотрен спейсер, высота которого в направлении опорного подшипника равна или меньше глубины углубления.
В патенте DE 20 2010 010 843 U1 раскрыт медицинский ручной инструмент типа ножниц или щипцов, имеющий два ручных рычага, каждый из которых имеет два плеча, которые в области двух центральных участков, сплющенных в форме пластины, шарнирно соединены друг с другом посредством шарнирной оси и поворачиваются друг против друга, при этом, в предпочтительном варианте осуществления изобретения, короткое плечо рычага каждого ручного рычага служит в качестве инструмента, и соответствующее второе более длинное плечо рычага служит для захвата, при этом на шарнирной оси, неподвижно закрепленной на сплющенном центральном участке первого ручного рычага, предусмотрен кольцеобразный фланец, который имеет расстояние, соответствующее, по меньшей мере, двойной толщине центрального участка второго ручного рычага, опирающийся на шарнирную ось от центрального участка первого ручного рычага, при этом шарнирная ось закреплена таким образом, что второй ручной рычаг в положении максимального поворота двух ручных рычагов на шарнирной оси продвигается, по меньшей мере, на максимальное расстояние, занимая положение, в котором также занимают противоположные внутренние поверхности сплющенных центральных участков и шарнирная ось.
В свою очередь, в патенте DE 20 2011 107 977 U1 раскрыт медицинский инструмент типа ножниц или щипцов, имеющий первый и второй ручные рычагами, каждый из которых имеет захватный элемент и инструментальный элемент, и которые соединены друг с другом с возможностью поворота посредством опорного шарнира, у которого предусмотрена радиально расширенная насадка, при этом первый ручной рычаг образует направляющую пластину в области между своим захватным элементом и своим инструментальным элементом, а второй ручной рычаг в этой области образует между своим захватным элементом и своим инструментальным элементом опорную пластину, в области которой опорный подшипник закреплен неподвижно, при этом направляющая пластина имеет разрыв для приема с возможностью поворота опорного подшипника, и при этом, в нормальном эксплуатационном режиме инструмента направляющая пластина и опорная пластина контактируют всеми своими поверхностями, причем разрыв направляющей пластины выполнен в виде щелевого отверстия, проходящего в продольном направлении направляющей пластины, и причем щелевое отверстие имеет в торцевой области своего концевого участка, прилегающего к инструментальной части, первое расширенное углубление, и щелевое отверстие имеет в торцевой области своего концевого участка в направлении, противоположном продольному направлению, второе расширенное углубление, в которое при необходимости может быть принята насадка опорного подшипника, и первое углубление имеет меньшую глубину, чем второе углубление, и опорная пластина на своей контактной поверхности, обращенной к направляющей пластине, имеет поперечную канавку, расположенную в области опорного подшипника и проходящую поперечно опорной пластине, причем их глубина соответствует, по меньшей мере, глубине первого углубления щелевого отверстия, а их ширина соответствует, по меньшей мере, ширине направляющей пластины, и при этом первый ручной рычаг с его направляющей пластиной может быть приведен в положение поворота, выровненное в одну линию с поперечной канавкой, и, путем регулировки, его можно направить к опорному подшипнику в поперечную канавку на такое расстояние, в котором насадка опорного подшипника прекратит контактировать с первым углублением щелевого отверстия, и можно заставить насадку опорного подшипника перекрыть, путем регулировки второго ручного рычага, второе углубление щелевого отверстия с его опорной пластиной и опорным подшипником вдоль щелевого отверстия, и ее можно заставить контактировать во втором углублении, путем регулировки в направлении опорного подшипника, а направляющая пластина и опорная пластина в этом положении находятся на расстоянии друг от друга.
Близкий уровень техники также известен из документов JP H04224785 A, JP H0780164 A и JP S58174064 U. Кроме того, известна статья R. Ulrich «Разработка разборного зажима и щипцов в зоне смыкания» в периодическом издании «Медицинская механика» т. 58, 1937, № 24, сс. 239-242.
В медицинских инструментах, известных из существующего уровня техники, направляющие участки выполнены очень маленькими, однако в результате этого не всегда обеспечивается безошибочное и точное направление двух ручных рычагов относительно друг друга. Кроме того, в некоторых известных медицинских инструментах сборка и, соответственно, разборка медицинского инструмента требуют больших усилий.
Цель настоящего изобретения состоит в том, чтобы избежать или, по меньшей мере, устранить недостатки существующего уровня техники и, в частности, реализовать размещение на расстоянии двух ручных рычагов, находящимися в рабочем положении, таким образом, чтобы обеспечить или, соответственно, облегчить слив жидкостей, таких как, например, ихор, кровь и так далее уже во время использования. Это также позволяет облегчить очистку и/или стерилизацию медицинского инструмента.
Цель настоящего изобретения достигается в универсальном медицинском инструменте благодаря тому, что происходит нажатие на опорный участок первого ручного рычага посредством распорного элемента, который обеспечивает расстояние посредством силы или сопротивления от направляющего участка второго ручного рычага, находящего в рабочем положении, в результате чего промежуток для очистки, находящийся между первым ручным рычагом и вторым ручным рычагом, проходит в область под направляющими выступами на стороне первого ручного рычага, обращенной в сторону от направляющих выступов, в предпочтительном варианте осуществления – по всей длине направляющего участка.
Предпочтительные варианты осуществления настоящего изобретения заявлены в зависимых пунктах формулы изобретения и будут объяснены ниже.
Следовательно, преимущество заключается в том, что распорный элемент выполнен в виде отдельного элемента или элемента, выполненного как единое целое. Преимущество отдельного элемента заключается в том, что он выполнен таким образом, что его можно легко заменить, поскольку элемент, выполненный как единое целое, уменьшает общее количество элементов и облегчает сборку.
Оказалось преимуществом, когда распорный элемент выполнен в виде кольца, манжеты или, по меньшей мере, одного контактного участка.
В другом предпочтительном варианте осуществления настоящего изобретения предлагается, чтобы распорный элемент был выполнен в виде пружины, магнита или резервуара высокого давления, или чтобы он включал термически активный элемент. В настоящем документе расстояние между направляющим участком и опорным участком образуется благодаря тому, что распорный элемент применяет силу, которая размещает опорный участок на расстоянии от направляющего участка.
Особое преимущество заключается в том, что распорный элемент выполнен с возможностью ручной регулировки высоты промежутка для очистки (систематической). Вышеупомянутый распорный элемент позволяет пользователю медицинского инструмента индивидуально изменять высоту промежутка для очистки различным образом.
В возможном предпочтительном варианте осуществления настоящего изобретения предлагается, чтобы опорный элемент был выполнен в виде винта или заклепки, причем винт разбирается легче (и не нарушая структуры), по сравнению с заклепкой, в то время как заклепка не может случайно отсоединиться. Однако также можно предложить и другие жесткие, нежесткие или адгезионные соединения.
Еще одно преимущество заключается в том, что высота промежутка для очистки в рабочем положении – меньше высоты промежутка для очистки в положении для очистки. Увеличенная высота промежутка в положении для очистки, таким образом, помогает дополнительно облегчать очистку и стерилизацию медицинского инструмента, в то время как в рабочем положении меньшая высота промежутка для очистки помогает дополнительно обеспечить безошибочное и точное направление двух ручных рычагов относительно друг друга.
В настоящем документе преимущество заключается в том, что положение для очистки соответствует собранному положению двух ручных рычагов. Таким образом, медицинский инструмент также может быть разобран для очистки и/или стерилизации по мере необходимости.
Оказалось преимуществом для медицинского инструмента, когда возможность поворота двух ручных рычагов относительно друг друга ограничена стопорным механизмом, который расположен/предусмотрен предпочтительно на ближнем конце соответствующего участка захвата. Это помогает предотвратить случайное приведение медицинского инструмента в положение для очистки во время использования оператором, таким как врач, операционный хирург или любой другой оператор.
В возможном примерном варианте осуществления настоящего изобретения предлагается, чтобы рабочий участок первого ручного рычага и рабочий участок второго ручного рычага были выполнены одинаково или по-разному. Это зависит от цели, для которой предназначен медицинский инструмент.
Кроме того, преимущество заключается в том, что участки захвата имеют эргономичную форму. Под эргономичной формой понимают, что участки захвата имеют форму, облегчающую захватывание, удержание и эксплуатацию медицинского инструмента одной рукой оператора и, соответственно, такая форма способствует тому, что такие действия становятся более удобными для оператора, и, таким образом, возможно более удобное и длительное использование медицинского инструмента, по сравнению с неэргономичной формой, такой как, например, когда участки захвата имеют форму стержня без какого-либо изгиба и имеют постоянную толщину. Эргономичные формы могут содержать, например, изгибы и/или углубления, исходя из формы/контура руки и/или пальцев, когда они захватывают/удерживают/эксплуатируют медицинский инструмент.
Кроме того, оказалось преимуществом, когда внешние края обоих направляющих выступов, проходящих в продольном направлении, имеют, по меньшей мере, одну пятую длины вставочного углубления. Еще одно преимущество заключается в том, что длина вставочного углубления – больше ширины первого ручного рычага в области опорного элемента. Таким образом, направляющие выступы помогают обеспечить корректное и точное направление опорного участка в рабочем положении, в то же время в положении для очистки и, соответственно, в собранном положении, можно осуществлять удобным образом очистку и, соответственно, сборку/разборку.
В другом примерном варианте осуществления настоящего изобретения предлагается, чтобы опорный участок первого ручного рычага скользящим образом соприкасался/контактировал с направляющими выступами в рабочем положении и, таким образом, получал точное направление.
В настоящем документе оказалось преимуществом, когда толщина опорного участка – меньше высоты направляющего промежутка, образованного между внутренней поверхностью направляющих выступов и поверхностью соединительного плеча направляющего участка, обращенной к внутренней поверхности направляющих выступов. Таким образом, опорный участок направляется точно в пределах вышеупомянутого направляющего промежутка, и соответствующее относительное перемещение двух ручных рычагов в рабочем положении может быть выполнено точным образом.
В альтернативном варианте осуществления также можно предположить, что настоящее изобретение дополнительно или в качестве альтернативы содержит, по меньшей мере, один из следующих аспектов. Вышеупомянутые аспекты могут быть дополнительно реализованы, по меньшей мере, в одной выделенной заявке даже без признаков независимого пункта формулы изобретения.
Таким образом, в другом предпочтительном варианте осуществления настоящего изобретения предлагается, например, чтобы опорный участок, приблизительно в соответствующем центре, имел меньшую толщину, чем участок захвата и/или рабочий участок, приблизительно в их соответствующем центре. Это представляется разумным, особенно с точки зрения изготовления, так как таким образом заготовку медицинского инструмента можно изготовить с постоянной толщиной, и на последующем этапе, например, посредством фрезерования или любого другого способа обработки металла абразивным материалом, можно довести опорный участок до желаемой толщины, при этом, при необходимости (в зависимости от выбранного способа), можно одновременно создать такую поверхность, которая требуется для создания направления в направляющих промежутках.
Еще одно преимущество заключается в том, что возможность поворота вокруг оси вращения обеспечивает относительный угол поворота между рабочими участками от 0° до более чем 90°, в предпочтительном варианте осуществления настоящего изобретения – до 120°. Это позволяет привести медицинский инструмент также в положение для очистки, предназначенное для очистки и стерилизации медицинского инструмента. В предпочтительном варианте осуществления настоящего изобретения, положение для очистки соответствует собранному положению, в котором два ручных рычага поворачиваются относительно друг друга посредством опорного элемента.
Кроме того, оказалось преимуществом, когда опорный участок и направляющий участок имеют контактные поверхности, обращенные друг к другу, которые скользящим образом соприкасаются/контактируют друг с другом в рабочем положении, и, таким образом, создается точное направление ручных рычагов относительно друг друга.
Еще одно преимущество для медицинского инструмента заключается в том, что ручные рычаги можно приводить как в рабочее положение, так и в положение для очистки. В преимущественном варианте осуществления настоящего изобретения положение для очистки соответствует собранному положению, в котором два ручных рычага соединены друг с другом посредством опорного элемента.
Кроме того, преимущество достигается тогда, когда направляющие выступы вместе с контактной поверхностью направляющего участка второго ручного рычага образуют поднутрение, например, в виде направляющей канавки.
Дополнительное преимущество достигается тогда, когда каждый из двух направляющих выступов имеет толщину, соответствующую, примерно, от 80% до, примерно, 120% толщины опорного участка, который должен быть принят во вставочном углублении, и, в предпочтительном варианте осуществления настоящего изобретения, соответствующую (точно) 100%. Это позволяет обеспечить достаточно высокую стабильность направляющих выступов, благодаря чему опорный участок направляется надлежащим точным образом.
В другом предпочтительном варианте осуществления настоящего изобретения предлагается, чтобы направляющие выступы имели с обеих сторон вставочного углубления обращенные друг к другу края/кромки выпуклой, сферической или округлой формы. Это помогает избежать острых краев, углов (например, с помощью выступающего гребня) и, таким образом, снизить риск травмирования как оператора, так и пациента.
Предпочтительно создавать направление опорного участка, когда ближний направляющий выступ имеет ближний концевой край, который выровнен параллельно ближнему концевому краю соединительного плеча и перпендикулярно продольной оси второго ручного рычага.
По тем же причинам, преимущество достигается тогда, когда дальний направляющий выступ имеет дальний концевой край, который выровнен параллельно дальнему концевому краю соединительного плеча и перпендикулярно продольной оси второго ручного рычага.
Оказалось преимуществом, когда при инерции центр тяжести области направляющего выступа расположен на оси симметрии, проходящей в продольном направлении. Это способствует правильной работе медицинского инструмента.
Другой возможный вариант осуществления настоящего изобретения относится к медицинскому инструменту, содержащему первый ручной рычаг, который имеет приводимый в действие вручную участок захвата на своем ближнем конце, рабочий участок для захватывания, зажимания или обрезания объекта – на своем дальнем конце и, лежащий между ними опорный участок, на котором опорный элемент контактирует для обеспечения возможности поворота вокруг оси вращения, находящейся между первым ручным рычагом и вторым ручным рычагом, при этом второй ручной рычаг имеет участок захвата на своем ближнем конце, рабочий участок – на своем дальнем конце и лежащий между ними направляющий участок, на котором опорный элемент контактирует, при этом опора выполнена таким образом, что в рабочем положении два ручных рычага жестко поддерживаются, хотя и с возможностью поворота относительно друг друга посредством опорного элемента, и что ручные рычаги могут быть разобраны в положении для очистки без использования инструментов.
В еще одном предпочтительном варианте осуществления настоящего изобретения предлагается, чтобы опора двух ручных рычагов относительно друг друга была выполнена в виде байонетного замка. Это облегчает сборку и разборку без использования инструментов. Диапазон, в котором байонетный замок закрыт, то есть, два ручных рычага по форме соответствуют друг другу, соответствует рабочему положению.
Для этой цели оказалось предпочтительным, когда в опорном участке первого ручного рычага опорный элемент предусмотрен в виде элемента, выполненного как единое целое. Это, с одной стороны, облегчает сборку а, с другой стороны, уменьшает общее количество элементов.
Еще одно преимущество заключается в том, что опорный элемент является по существу круглым, то есть, округлым в плоскости поворота (плоскости, перпендикулярной оси вращения), и в направлении по окружности, в предпочтительном варианте осуществления настоящего изобретения он имеет равномерно распределенные 2, 3, 4, 5 или 6 выступающий частей/выступов. Они служат для жесткого соединения в виде байонетного замка первого ручного рычага со вторым ручным рычагом.
С этой точки зрения, преимущество достигается тогда, когда направляющий участок второго ручного рычага является по существу круглым, то есть, округлым в плоскости поворота (пластина, перпендикулярная оси вращения) и включает направляющий промежуток, проходящий в направлении по окружности. Выступающие части опорного элемента, встроенного в первый ручной рычаг, контактируют в вышеупомянутом направляющем промежутке и, соответственно, взаимодействуют с ним и, таким образом, образуют замок байонетного типа.
В другом предпочтительном варианте осуществления настоящего изобретения предлагается, чтобы периферийный направляющий промежуток прерывался множеством углублений, в предпочтительном варианте осуществления настоящего изобретения – чтобы он был равномерно распределен в направлении по окружности. Выступающие части опорного элемента могут быть вставлены в вышеупомянутые углубления, то есть, медицинский инструмент находится в положении для очистки или, соответственно, в собранном/разобранном положении, когда выступающие части расположены в углублениях.
Преимущество достигается тогда, когда количество и положение по периферии соответствующих выступающих частей/выступов соответствуют количеству и положению по периферии соответствующих углублений. Только таким образом, возможно осуществить сборку и, соответственно, разборку медицинского инструмента удобным образом.
В другом возможном примерном варианте осуществления настоящего изобретения предлагается, чтобы опорный элемент был выполнен в виде штифта, проходящего вдоль оси вращения, при этом направляющий участок второго ручного рычага с одной стороны имеет вставочное углубление для приема опорного участка первого ручного рычага с тем, чтобы два направляющих выступа, расположенных на удалении и вблизи от вставочного углубления, по меньшей мере, частично охватывали опорный участок в рабочем положении, в котором происходит захватывание, зажимание или обрезание. Преимуществом для реализации поворотного соединения первого ручного рычага со вторым ручным рычагом оказалось наличие на опорном участке первого ручного рычага отверстия, в которое можно вставить штифт.
В предпочтительных вариантах осуществления настоящего изобретения, выступающие части/выступы имеют, например, трапециевидную форму или форму штифта. Однако приемлемы и любые другие геометрические формы.
Кроме того, еще одно преимущество достигается тогда, когда поворот двух ручных рычагов относительно друг друга в рабочем положении определяется количеством и расположением углублений, распределенных по периферии.
Другими словами, настоящее изобретение состоит в том, что промежуток для очистки, находящийся между первым ручным рычагом и вторым ручным рычагом, специально предназначенный для очистки и/или стерилизации медицинского инструмента, образован уже в рабочем положении и проходит по всей длине направляющего участка.
В дальнейшем, настоящее изобретение будет подробно объяснено с помощью фигур, на которых изображены различные варианты осуществления, при этом:
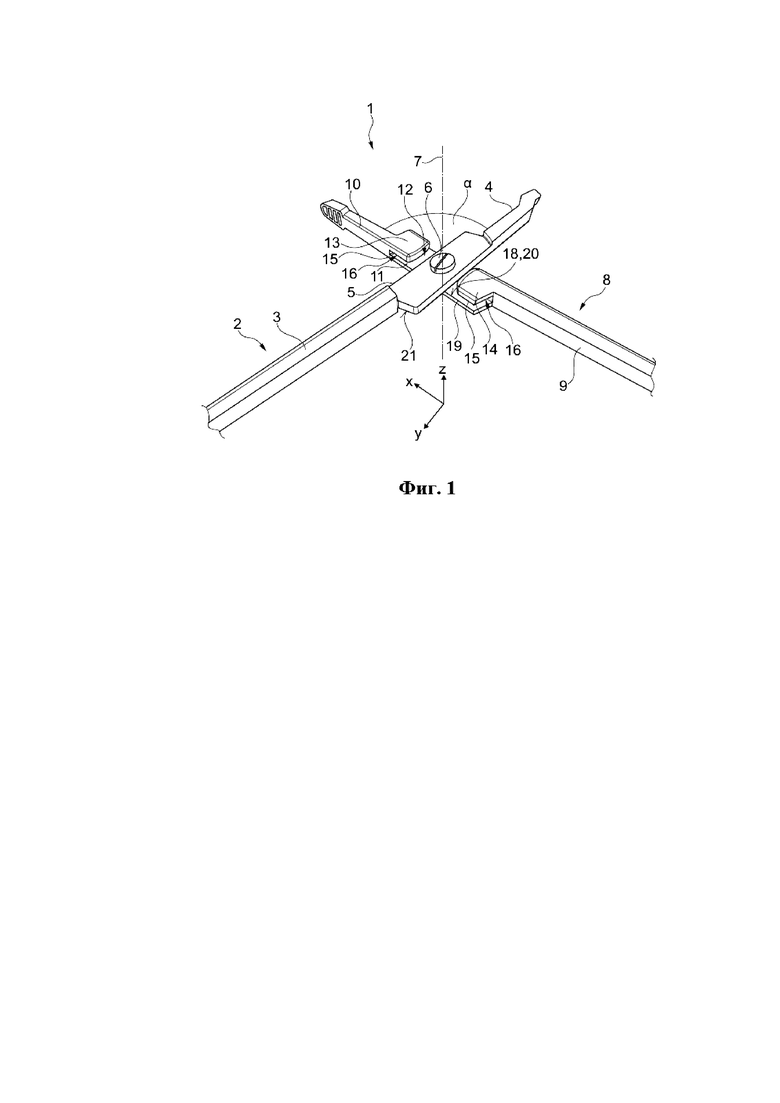
на Фигуре 1 показан вид в перспективе медицинского инструмента первого примерного варианта осуществления настоящего изобретения в собранном положении и, соответственно, в положении для очистки;
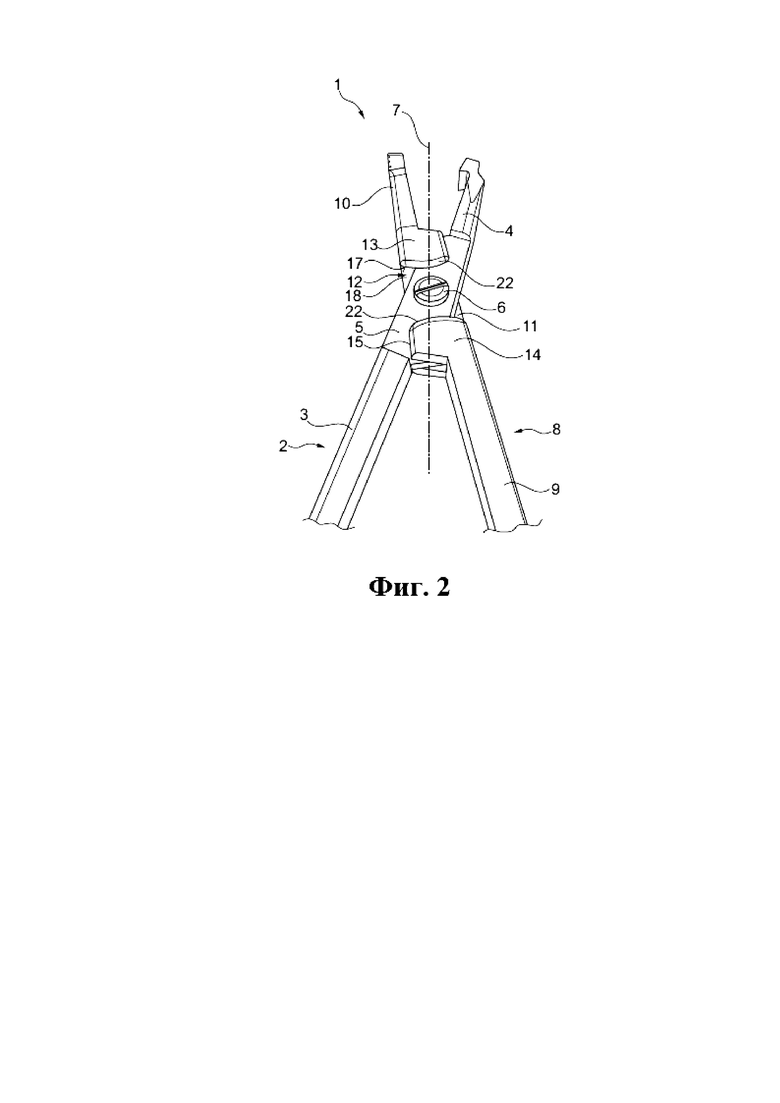
на Фигуре 2 показан вид в перспективе медицинского инструмента первого примерного варианта осуществления настоящего изобретения в эксплуатационном положении и, соответственно, рабочем положении;
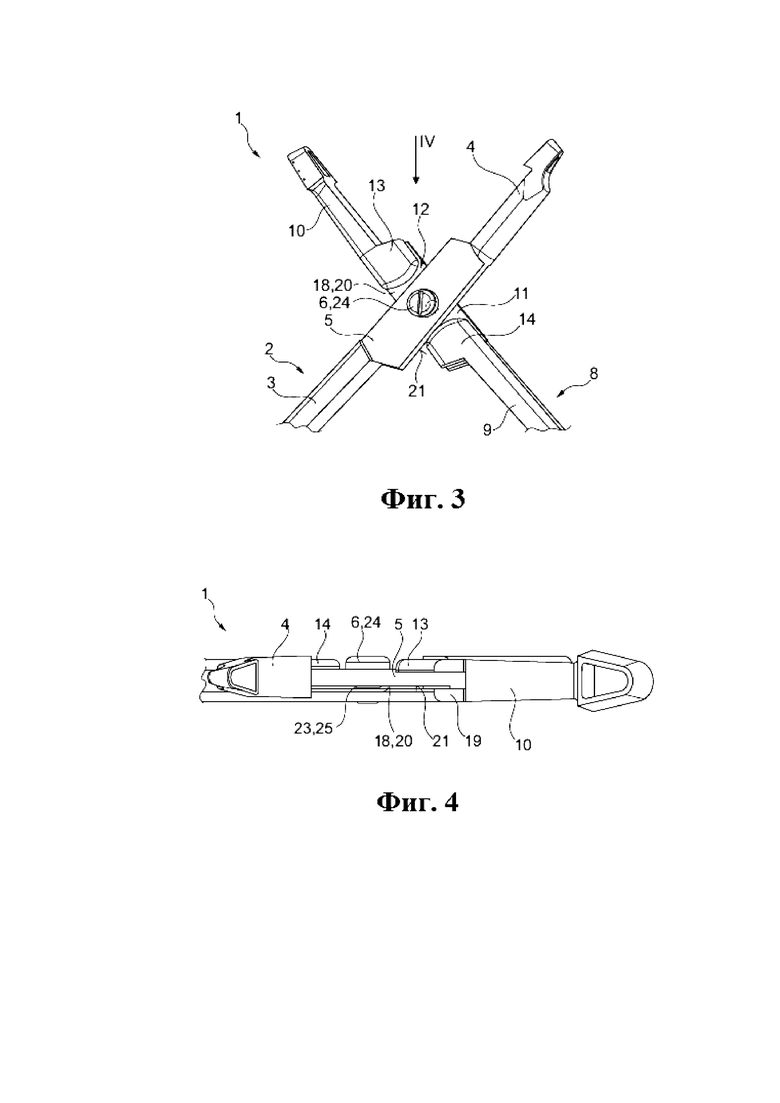
на Фигуре 3 показан вид сверху второго примерного варианта осуществления медицинского инструмента в собранном положении и, соответственно, в положении для очистки;
на Фигуре 4 показан вид сверху второго примерного варианта осуществления настоящего изобретения, если смотреть в направлении стрелки IV Фигуры 3;
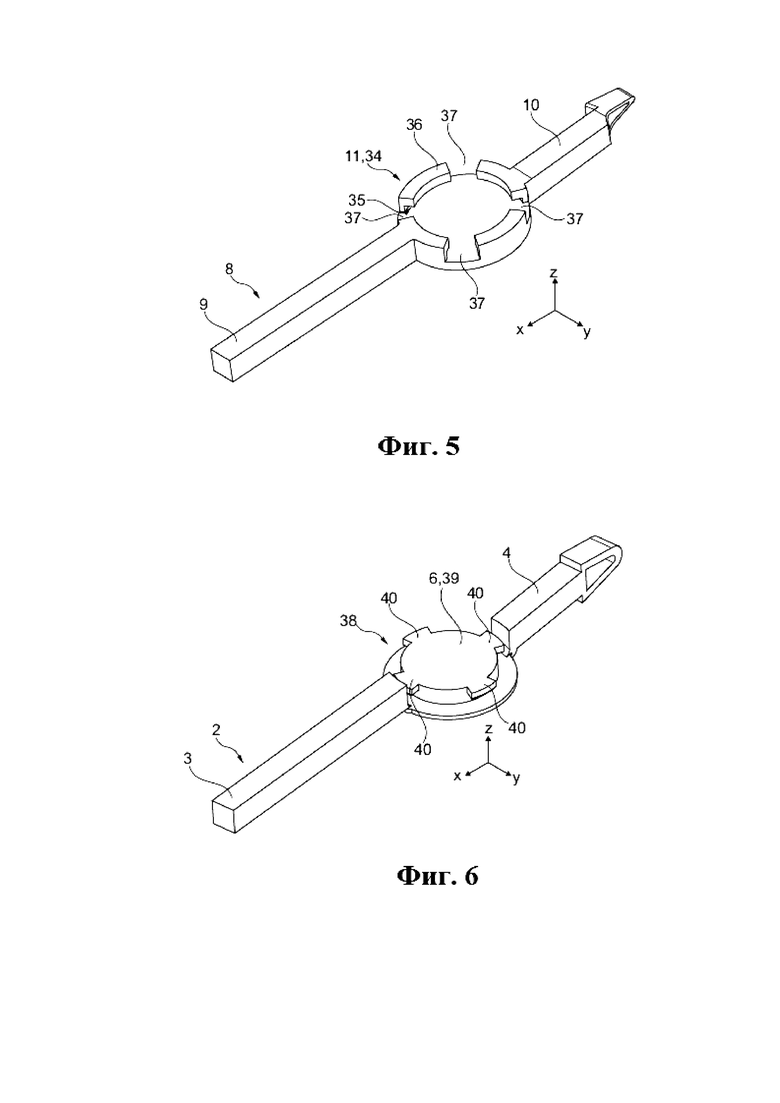
на Фигуре 5 показан вид в перспективе второго ручного рычага медицинского инструмента третьего примерного варианта осуществления настоящего изобретения;
на Фигуре 6 показан вид в перспективе первого ручного рычага медицинского инструмента третьего варианта осуществления настоящего изобретения;
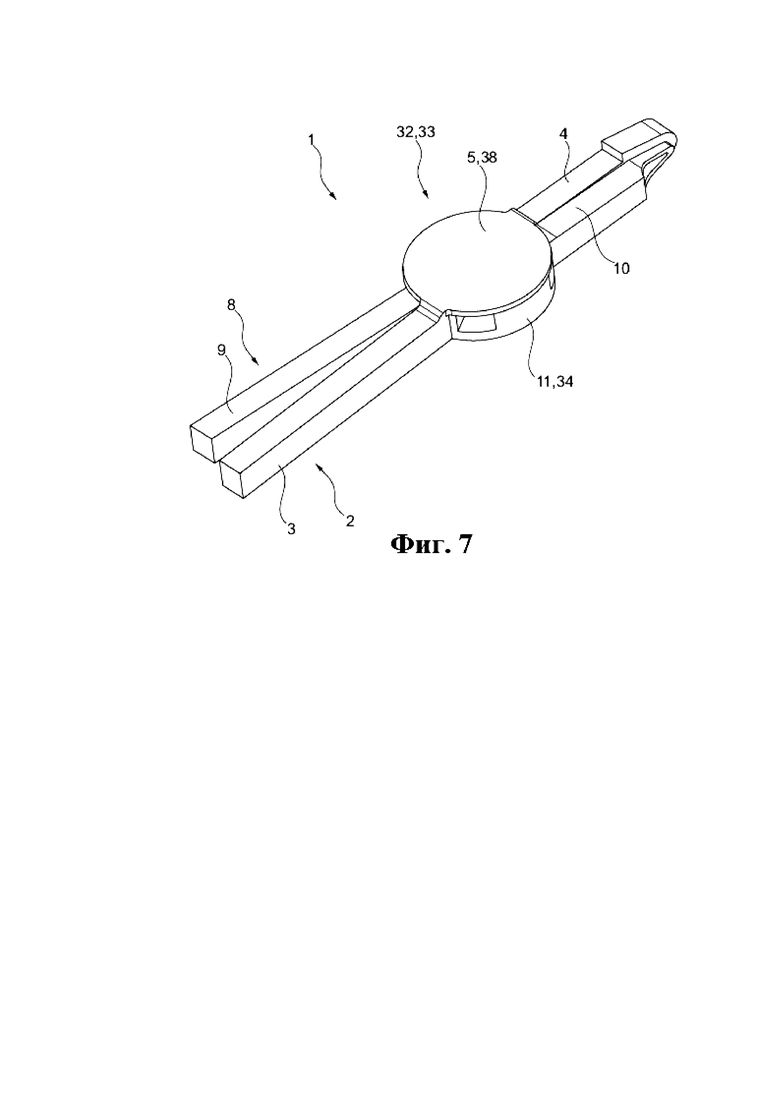
на Фигуре 7 показан вид в перспективе первого ручного рычага и второго ручного рычага медицинского инструмента в третьем примерном варианте осуществления настоящего изобретения в собранном положении;
на Фигуре 8 показан вид сверху в перспективе медицинского инструмента в четвертом примерном варианте осуществления настоящего изобретения в собранном положении и, соответственно, в положении для очистки;
на Фигуре 9 показан вид сверху, если смотреть вдоль стрелки IX Фигуры 8, медицинского инструмента в четвертом примерном варианте осуществления настоящего изобретения;
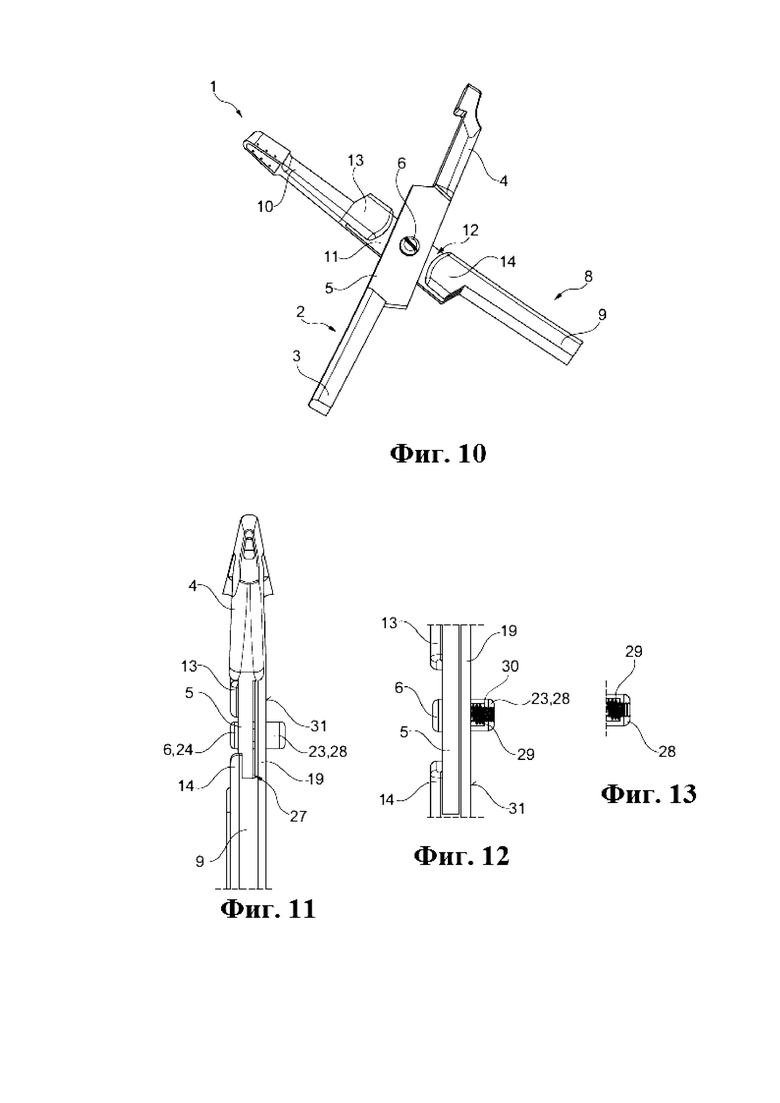
на Фигуре 10 показан вид сверху медицинского инструмента в пятом примерном варианте осуществления настоящего изобретения;
на Фигуре 11 показан вид сбоку медицинского инструмента пятого примерного варианта осуществления настоящего изобретения;
на Фигуре 12 показан увеличенный вид прорези медицинского инструмента пятого примерного варианта осуществления настоящего изобретения в области соединения первого ручного рычага и второго ручного рычага в первом положении;
на Фигуре 13 показан детализированный вид опорного элемента во втором возможном положении;
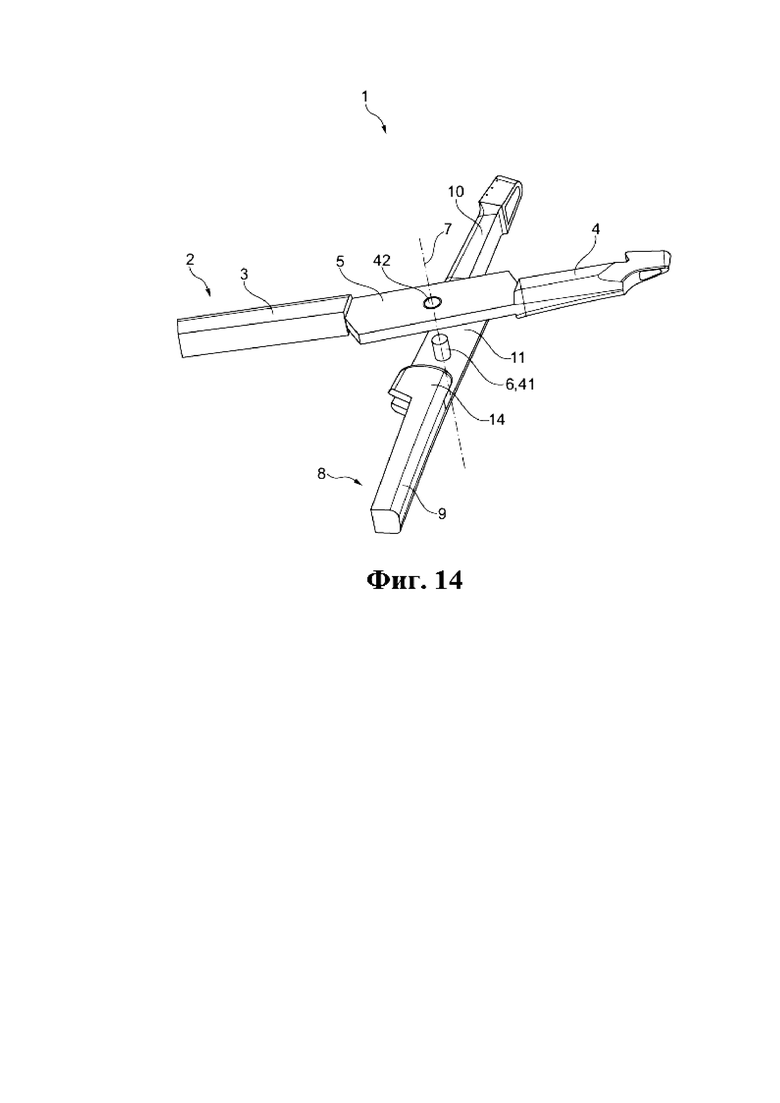
на Фигуре 14 показан вид в перспективе медицинского инструмента в шестом примерном варианте осуществления настоящего изобретения в разобранном состоянии; и
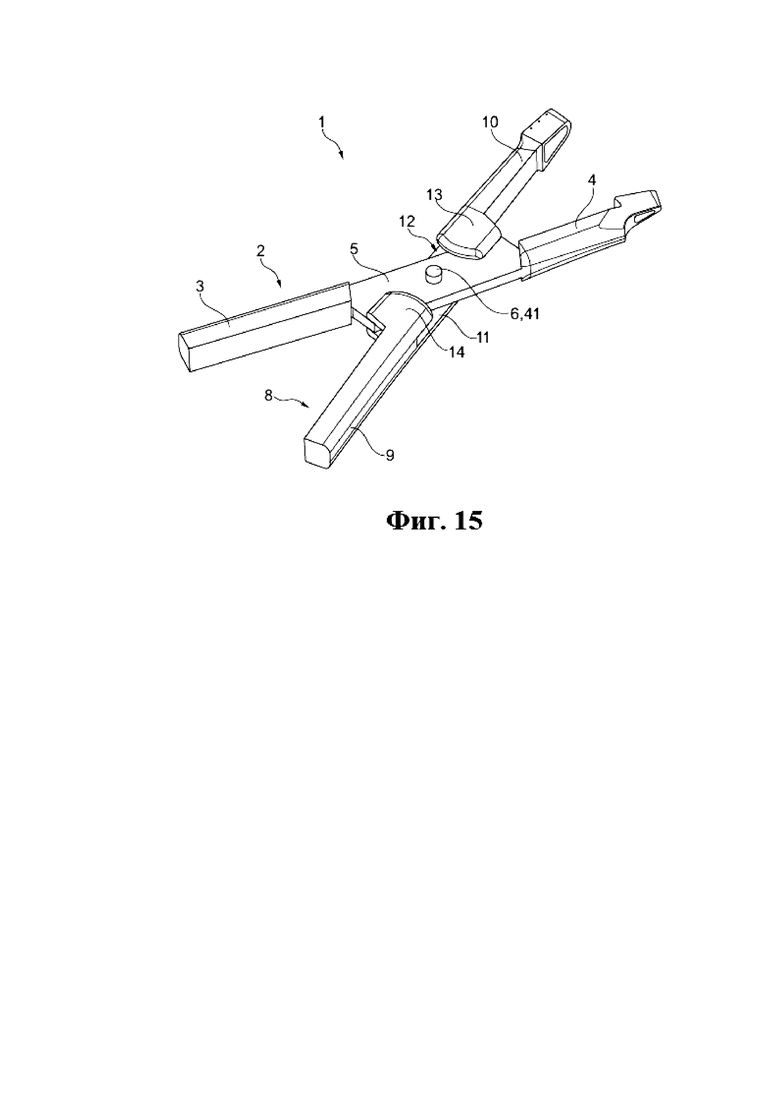
На Фигуре 15 показан вид в перспективе медицинского документа шестого примерного варианта осуществления настоящего изобретения в рабочем положении.
Фигуры являются просто схематическими изображениями, и они служат только для понимания настоящего изобретения. Подобные элементы имеют одинаковые позиционные обозначения.
Признаки конкретных примерных вариантов осуществления настоящего изобретения также могут быть реализованы и в других примерных вариантах осуществления настоящего изобретения. Следовательно, они являются взаимозаменяемыми.
На Фигуре 1 показан медицинский инструмент 1 первого примерного варианта осуществления настоящего изобретения на виде в перспективе, который содержит первый ручной рычаг 2, по существу состоящий из трех участков: участок захвата 3, рабочий участок 4 и опорный участок 5.
Участок захвата 3 расположен на ближнем конце рычага первого ручного рычага 2 и служит для приведения в действие вручную пользователем, таким как хирург или операционный хирург, или врач. Рабочий участок 4 выполнен приблизительно в виде бранши и служит для захватывания, зажимания или обрезания объекта, такого как, например, ткань организма пациента, и он расположен на дальнем конце первого ручного рычага 2. Между участком захвата 3 и рабочим участком 4 расположен опорный участок 5, который по существу служит для соединения первого ручного рычага 2 посредством опорного элемента 6 со вторым ручным рычагом 8 с возможностью поворота вокруг совместной оси вращения 7.
Второй ручной рычаг 8 содержит участок захвата 9, рабочий участок 10 и направляющий участок 11. Участок захвата 9 расположен, аналогично участку захвата 3 первого ручного рычага 2, на ближнем конце второго ручного рычага 8, а рабочий участок 10 расположен на дальнем конце второго ручного рычага 8. Направляющий участок 11 расположен между участком захвата 9 и рабочим участком 10.
Направляющий участок 11 на одной стороне имеет вставочное углубление 12, которое позволяет удобным образом собрать опорный участок 5 в положение для очистки и, соответственно, в собранное положение (как показано на Фигуре 1) и охватить опорный участок 5 в эксплуатационном или рабочем положении (см. Фигуру 2), по меньшей мере, частично посредством двух направляющих выступов 13, 14, расположенных на удалении и вблизи от вставочного углубления 12, и, таким образом, направить первый ручной рычаг 2 против второго ручного рычага 8.
Собранное положение и, соответственно, положение для очистки соответствует такому положению, в котором относительный угол поворота б, измеренный между двумя рабочими участками 4, 10, выбирается таким образом, чтобы опорный участок 5 не контактировал в направляющих выступах 13, 14 и, соответственно, не охватывался последними. Это соответствует такому положению двух ручных рычагов 2, 8 относительно друг друга, когда первый ручной рычаг 2 можно удобным образом соединить или, соответственно, собрать на втором ручном рычаге 8 с помощью опорного элемента 6 в области опорного участка 5.
Эксплуатационное и, соответственно, рабочее положение медицинского инструмента 1, как показано на Фигуре 2, описывает одно положение или все положения под заданным углом (в пределах углового диапазона), в которые первый ручной рычаг 2 направляется относительно второго ручного рычага 8 посредством направляющих выступов 13, 14 с помощью опорного участка 5. В рабочем положении происходит захватывание, зажимание или обрезание какого-либо предмета, такого как, например, ткань человеческого организма.
Возможность относительного поворота двух ручных рычагов 2, 8 может быть ограничена с помощью блокирующего устройства (в настоящем документе не показано), которое предусмотрено, например, на ближних концах соответствующего участка захвата 3, 9. Это помогает исключить случайное перемещение оператором медицинского инструмента 1 во время работы/использования в собранное положение и в положение для очистки.
Направляющие выступы 13, 14 имеют наружные края 15, проходящие по обеим сторонам в продольном направлении второго ручного рычага 8, которые составляют, по меньшей мере, одну пятую, в предпочтительном варианте осуществления настоящего изобретения – одну четвертую, длины углубления 12, что обеспечивает безопасное направление опорного участка 5 по всему рабочему диапазону.
Длина углубления 12 – больше ширины первого ручного рычага 2 в области опорного элемента 6. Это помогает осуществить сборку и, соответственно, разборку медицинского инструмента 1 удобным образом.
Длина углубления 12 видна в продольном направлении второго ручного рычага 8 и соответствует направлению X системы координат Фигуры 1. На Фигуре 1 продольное направление первого ручного рычага 2 соответствует направлению Y, а ширина первого ручного рычага 2 проходит в плоскости XY, которая соответствует плоскости поворота медицинского инструмента 1, вдоль направления X (перпендикулярно направлению Y). Толщина всех участков первого ручного рычага 2 и второго ручного рычага 8 проходит в направлении Z показанной системы координат.
Однако как на Фигуре 1, так и особенно на Фигуре 2 можно четко увидеть, что толщина опорного участка 5 – меньше высоты направляющего промежутка 16, образованного между внутренней поверхностью 17 направляющих выступов 13, 14 и поверхностью обращенного к ним так называемого соединительного плеча 19 направляющего участка 11. Поверхность представляет собой внутреннюю поверхность 18 соединительного плеча 19, и она, особенно в рабочем положении, служит в качестве направляющей и контактной поверхности 20, обращенной к контактной поверхности 21 (нижняя поверхность на Фигуре 1) опорного участка 5, при этом вышеупомянутые две контактные поверхности 20 , 21 скользящим образом контактируют друг с другом в рабочем положении.
Каждый из направляющих выступов 13, 14 имеет край 22, обращенный к углублению 12 (см. Фигуру 2), причем этот край, в предпочтительном варианте осуществления настоящего изобретения, принимает выпуклую, сферическую или округлую форму, как показано, в частности, на Фигуре 1 и Фигуре 2.
Рабочие участки 4, 10 могут быть выполнены по-разному, как продемонстрировано на Фигуре 1 и Фигуре 2, но в альтернативном варианте осуществления настоящего изобретения они также могут иметь и одинаковый дизайн. Рабочие участки 4, 10, как показано в настоящем документе, приведены только в качестве примера, и возможны также различные конструкции рабочих участков 4, 10.
На Фигуре 3 и Фигуре 4 продемонстрирован второй примерный вариант осуществления медицинского инструмента 1. В вышеупомянутом втором примерном варианте осуществления настоящего изобретения предлагается, чтобы контактные поверхности 20, 21 (см. Фигуру 4) не контактировали друг с другом, поскольку между ними расположен распорный элемент 23, служащий для размещения контактных поверхностей 20, 21 на расстоянии друг от друга. На Фигуре 3 продемонстрирован медицинский инструмент 1 второго примерного варианта осуществления настоящего изобретения в собранном положении и в положении для очистки, причем Фигура 3 по существу соответствует Фигуре 1. Разница между первым примерным вариантом осуществления настоящего изобретения, показанным на Фигуре 1, и вторым примерным вариантом осуществления настоящего изобретения, показанным на Фигуре 3, станет очевидной только на виде, показанном на Фигуре 4.
Во втором примерном варианте осуществления настоящего изобретения, так же, как и в первом продемонстрированном примерном варианте осуществления настоящего изобретения, опорный элемент 6 имеет форму винта 24. В альтернативных вариантах осуществления опорного элемента 6 также предлагается, например, заклепка. Однако в качестве опорного элемента 6 также можно предложить дополнительные соединительные элементы, такой как, например, штифт (см. также Фигуру 14 и Фигуру 15 в данном контексте).
На Фигуре 4 распорный элемент 23 выполнен в качестве элемента, создающего сопротивление, в виде отдельного кольца 25. В качестве альтернативного варианта осуществления настоящего изобретения распорный элемент 23 также может быть выполнен как единое целое в виде кольца, например, в виде периферийной манжеты или в виде участков, образованных с обеих сторон опорного элемента 6. Одним из преимуществ отдельного элемента, среди прочего, является простота заменяемости распорного элемента 23, благодаря чему, путем использования различных распорных элементов, можно изменять расстояние между направляющим участком 11 и опорным участком 5.
Вместо распорного элемента, который создает сопротивление, распорный элемент 23 также может быть выполнен, как показано на примере в четвертом варианте осуществления настоящего изобретения (см. Фигуру 8 и Фигуру 9), в виде элемента, применяющего силу, например, в виде пластинчатой пружины 26. Вышеупомянутые элементы, применяющие силу, включают, среди прочего, другие типы пружин, такие как, например, дисковая пружина или спиральная пружина, а также магниты, при этом в данном случае магнитное отталкивание используется для установления расстояния между опорным участком 5 и внутренней поверхностью 18 направляющего участка 11, или, в альтернативном варианте осуществления настоящего изобретения также возможно применять резервуар высокого давления. Кроме того, также можно предложить в качестве примера термически активный элемент, который расширяется от определенной температуры и, таким образом, приводит к установлению расстояния.
На Фигурах 10-13 продемонстрирован пятый примерный вариант осуществления медицинского инструмента 1, в котором предложен распорный элемент 23, который позволяет определенным образом регулировать вручную высоту (если смотреть вдоль/в направлении оси вращения 7) промежутка для очистки 27. В этом контексте на Фигуре 10 продемонстрирован вид сверху на пятый примерный вариант осуществления медицинского инструмента 1 в собранном положении и в положении для очистки, который по существу соответствует представлениям, показанным на Фигуре 1 и Фигуре 3.
Распорный элемент 23, предложенный в этом варианте осуществления настоящего изобретения, выполнен таким образом, что на соединительном плече 19 (см. Фигуру 11) закреплена распорная втулка 28, в которую может быть ввинчен опорный элемент 6 в виде винта 24. То есть, распорная втулка 28 в своей внутренней части содержит внутреннюю резьбу, в которую может быть ввинчен/завернут винт 24.
Как видно из Фигуры 12 и Фигуры 13, в распорной втулке 28 находится спиральная пружина 29, которая расположена в гнезде 30, образованном внутри распорной втулки 28, причем внутренний диаметр гнезда 30 – больше наружного диаметра внутренней резьбы. Спиральная пружина 29 опирается одним концом на основание/нижнюю часть гнезда 30 и примыкает другим концом к внешней поверхности 31 соединительного плеча 19. Высоту промежутка для очистки 27 можно произвольно регулировать посредством глубины навинчивания опорного элемента 6 на внутреннюю резьбу распорной втулки 28 и силы, передаваемой от смещения спиральной пружины 29, которая воздействует на внешнюю поверхность 31 соединительного плеча 19.
На Фигурах 5-7, а также на Фигурах 14 и 15 продемонстрирован третий и, соответственно, шестой примерный вариант осуществления настоящего изобретения, каждый из которых предусматривает соединение ручных рычагов 2, 8, которые разбираются без использования инструментов.
Третий примерный вариант осуществления настоящего изобретения, показанный на Фигурах 5-7, представляет собой опору 32 в виде байонетного замка 33 (см. Фигуру 7). С этой точки зрения, например, второй ручной рычаг 8 имеет направляющий участок 11 в виде направляющего участка 34 по существу округлой/круглой формы в плоскости XY. Направляющий участок 34 включает направляющий промежуток 35, проходящий в направлении по окружности, который образован направляющим выступом 36, проходящим в направлении по окружности, причем направляющий выступ 36 проходит радиально внутрь от наружной окружности направляющего участка 34.
Периферийный направляющий промежуток 35 и, соответственно, периферийный направляющий выступ 36 прерываются, по меньшей мере, одной прорезью 37, в предпочтительном варианте осуществления настоящего изобретения – множеством прорезей (четыре на Фигуре 5), которые в предпочтительном варианте осуществления настоящего изобретения расположены таким образом, чтобы они были равномерно распределены по окружности.
Первый ручной рычаг 2, показанный на Фигуре 6, содержит участок захвата 3 и рабочий участок 4, как это уже известно из других вариантов осуществления настоящего изобретения. Лежащий между ними опорный участок 5 предложен в виде опорного участка 38, выполненного по существу в виде округлой или круглой формы в плоскости XY Фигуры 6, причем вышеупомянутой опорный участок 38 образует аналог направляющего участка 34, как показано на Фигуре 5.
Опорный элемент 6 в опорном участке 38 предложен как единое целое, и в дальнейшем он будет также упоминаться как опорный элемент 39. Опорный элемент 39, так же как и опорный участок 38, принимает по существу округлую форму в плоскости XY, проходит вдоль вертикального направления (направление Z на Фигуре 6) и имеет меньший внешний диаметр, чем опорный участок 38. Вышеупомянутый округлый опорный элемент 39 включает, по меньшей мере, один, в предпочтительном варианте осуществления – множество или, соответственно, 2, 3, 4, 5 или 6 (четыре на Фигуре 6) выступающих частей или выступов 40, которые проходят радиально снаружи от внешней окружности опорного элемента 39.
Количество имеющихся выступающих частей 40 и их расположение по периферии соответствует количеству и расположению соответствующих прорезей 37 в направляющем участке 34. Направляющий участок 34 и опорный участок 38 адаптированы друг к другу таким образом, так что они жестко контактируют, и действие байонетного замка 33 (см. Фигуру 7) осуществляется путем вращения двух ручных рычагов 2, 8 относительно друг друга.
Рабочее положение распространяется на область, определяемую направляющими выступами 36. То есть, регулируемый угол б зависит от количества и расположения направляющих выступов 36 и, соответственно, прорезей 37. В примерном варианте осуществления настоящего изобретения, показанном на Фигурах 5-7, например, регулируемый угол б – меньше 90 °. Однако больший регулируемый угол б (который, например, больше 90 °) может быть реализован путем неравномерного распределения выступающих частей 40 (и, таким образом, также путем неравномерного распределения прорезей 37). В альтернативном варианте осуществления настоящего изобретения можно предложить другую конструкцию выступающих частей 40 таким образом, чтобы не каждая выступающая часть подходила для каждой прорези 37.
Выступающие части 40, показанные в данном варианте осуществления настоящего изобретения, имеют трапециевидную форму. В альтернативном варианте осуществления настоящего изобретения возможны также и другие геометрические формы, такие как форма штифта или треугольная форма и т.д., которые при взаимодействии с соразмерными прорезями 37 на направляющем участке 34 обеспечивают соединение двух ручных рычагов 2, 8 по типу байонетного замка.
На Фигуре 14 и Фигуре 15 продемонстрирован шестой примерный вариант осуществления настоящего изобретения, по существу соответствующий первому варианту осуществления настоящего изобретения, показанному на Фигуре 1 и Фигуре 2, с той лишь разницей, что в качестве опорного элемента 6 предложен только штифт 41. В этом случае, вышеупомянутый штифт выполнен как единое целое со вторым ручным рычагом 8 и, при сборке медицинского инструмента 1, в собранном положении и в положении для очистки, вставляется через или в отверстие 42, расположенное на опорном участке 5 первого ручной рычага 2. В рабочем положении два ручных рычага 2, 8 ориентированы относительно друг друга посредством направляющих выступов 13, 14 (см. Фигуру 15). В собранном положении и в положении для очистки (см. Фигуру 14) два ручных рычага 2, 8 могут быть отделены друг от друга без использования инструментов, что соответствует разборке медицинского инструмента 1, например, для очистки и стерилизации, без использования инструментов.
В альтернативном варианте осуществления настоящего изобретения опорный элемент 6 также может быть предложен в виде отдельного штифта, например, в виде анкерного штифта, который затем можно ввинчивать в резьбу, которая имеется в направляющем участке 11.
Список позиционных обозначений
1 медицинский инструмент
2 первый ручной рычаг
3 участок захвата
4 рабочий участок
5 опорный участок
6 опорный элемент
7 ось вращения
8 второй ручной рычаг
9 участок захвата
10 рабочий участок
11 направляющий участок
12 углубление
13 направляющий выступ
14 направляющий выступ
15 внешний край
16 направляющий промежуток
17 внутренняя поверхность
18 внутренняя поверхность
19 соединительное плечо
20 направляющая и контактная поверхность
21 контактная поверхность
22 край
23 распорный элемент
24 винт
25 кольцо
26 пластинчатая пружина
27 промежуток для очистки
28 распорная втулка
29 спиральная пружина
30 гнездо
31 наружная поверхность
32 опора
33 байонетный замок
34 направляющий участок
35 направляющий промежуток
36 направляющий выступ
37 прорезь
38 опорный участок
39 округлый опорный элемент
40 выступающие части
41 штифт
42 отверстие
б регулируемый угол
| название | год | авторы | номер документа |
|---|---|---|---|
| ХИРУРГИЧЕСКОЕ УСТРОЙСТВО | 2012 |
|
RU2559922C1 |
| МЕДИЦИНСКИЙ МАНИПУЛЯТОР | 2008 |
|
RU2445933C2 |
| РУЧНОЙ РАБОЧИЙ ИНСТРУМЕНТ | 2016 |
|
RU2698611C2 |
| ИНСТРУМЕНТ ДЛЯ ЭКСПЛУАТАЦИОННОЙ ПРОВЕРКИ БОЛТА И СПОСОБ ПРОВЕРКИ | 2009 |
|
RU2506156C2 |
| УДЕРЖИВАЮЩЕЕ УСТРОЙСТВО ДЛЯ ЖИДКОСТНОГО ИНФУЗИОННОГО НАСОСА И УСТРОЙСТВО ДЛЯ ИНФУЗИИ ЖИДКОСТИ, СОДЕРЖАЩЕЕ УДЕРЖИВАЮЩЕЕ УСТРОЙСТВО | 2020 |
|
RU2826003C1 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С УСОВЕРШЕНСТВОВАННОЙ КОНСТРУКЦИЕЙ РЫЧАГА ПРОШИВКИ/ОТРЕЗАНИЯ | 2009 |
|
RU2497465C2 |
| КОМПЛЕКТ ПРОКЛАДОК ДЛЯ ЩЕКОВОЙ ДРОБИЛКИ | 2012 |
|
RU2592558C2 |
| НАЖИМНО-ВЫТЯЖНОЙ ЗАТВОР ДЛЯ ЕМКОСТИ ДЛЯ ПИТЬЯ | 2009 |
|
RU2481259C2 |
| КАРБЮРАТОРНАЯ УСТАНОВКА | 2010 |
|
RU2553481C2 |
| ПОВОРОТНЫЙ МЕХАНИЗМ РЕГУЛЯТОРА НАКЛОНА СПИНКИ СИДЕНЬЯ | 2007 |
|
RU2486075C2 |

Изобретение относится к медицинской технике, а именно к медицинскому инструменту для захватывания, зажима или обрезания. Медицинский ручной инструмент для захватывания, зажима или обрезания содержит первый ручной рычаг, который имеет участок захвата на своем ближнем конце, выполненный с возможностью приведения в действие вручную, рабочий участок захватывания, зажимания или обрезания объекта на своем дальнем конце и лежащий между ними опорный участок, на котором контактирует опорный элемент с возможностью поворота вокруг оси вращения между первым ручным рычагом и вторым ручным рычагом. Второй ручной рычаг имеет участок захвата на своем ближнем конце, рабочий участок на своем дальнем конце и лежащий между ними направляющий участок, на котором контактирует опорный элемент. Направляющий участок второго ручного рычага имеет на одной стороне углубление для приема опорного участка первого ручного рычага. Два направляющих выступа, расположенных на удалении и вблизи от углубления, по меньшей мере частично охватывают опорный участок в рабочем положении, в котором осуществляется захватывание, зажимание или обрезание. При нажатии на опорный участок первого ручного рычага посредством распорного элемента, который обеспечивает расстояние посредством силы или сопротивления от направляющего участка второго ручного рычага, находящего в рабочем положении, промежуток для очистки формируется между первым ручным рычагом и вторым ручным рычагом. Промежуток для очистки проходит по всей длине направляющего участка. Изобретение характеризуется тем, чтобы реализовать размещение на расстоянии двух ручных рычагов, находящихся в рабочем положении, таким образом, чтобы обеспечить или облегчить слив жидкостей, что также позволяет облегчить очистку и/или стерилизацию медицинского инструмента. 9 з.п. ф-лы, 15 ил.
1. Медицинский ручной инструмент для захватывания, зажима или обрезания (1), содержащий первый ручной рычаг (2), который имеет участок захвата (3) на своем ближнем конце, выполненный с возможностью приведения в действие вручную, рабочий участок (4) захватывания, зажимания или обрезания объекта на своем дальнем конце и лежащий между ними опорный участок (5), на котором контактирует опорный элемент (6) с возможностью поворота вокруг оси вращения (7) между первым ручным рычагом (2) и вторым ручным рычагом (8), при этом второй ручной рычаг (8) имеет участок захвата (9) на своем ближнем конце, рабочий участок (10) на своем дальнем конце и лежащий между ними направляющий участок (11), на котором контактирует опорный элемент (6), при этом направляющий участок (11) второго ручного рычага (8) имеет на одной стороне углубление (12) для приема опорного участка (5) первого ручного рычага (2), при этом два направляющих выступа (13, 14), расположенных на удалении и вблизи от углубления (12), по меньшей мере частично охватывают опорный участок (5) в рабочем положении, в котором осуществляется захватывание, зажимание или обрезание, при этом при нажатии на опорный участок (5) первого ручного рычага (2) посредством распорного элемента (23), который обеспечивает расстояние посредством силы или сопротивления от направляющего участка (11) второго ручного рычага (8), находящего в рабочем положении, промежуток для очистки (27) формируется между первым ручным рычагом (2) и вторым ручным рычагом (8), отличающийся тем, что промежуток для очистки (27) проходит по всей длине направляющего участка (11).
2. Медицинский ручной инструмент (1) по п. 1, отличающийся тем, что распорный элемент (23) выполнен в виде отдельного элемента или элемента, выполненного как единое целое.
3. Медицинский ручной инструмент (1) по п. 1 или 2, отличающийся тем, что распорный элемент (23) выполнен в виде кольца (25), манжеты или контактного участка.
4. Медицинский ручной инструмент (1) по п. 1 или 2, отличающийся тем, что распорный элемент (23) выполнен в виде пружины (26), магнита или резервуара высокого давления или он имеет термически активный элемент.
5. Медицинский ручной инструмент (1) по любому из пп. 1-4, отличающийся тем, что распорный элемент (23) выполнен с возможностью регулировки высоты промежутка для очистки вручную.
6. Медицинский ручной инструмент (1) по любому из пп. 1-5, отличающийся тем, что опорный элемент (6) выполнен в виде винта (24) или заклепки.
7. Медицинский ручной инструмент (1) по пп. 1, 2 или 4, отличающийся тем, что высота промежутка для очистки меньше в рабочем положении, чем высота промежутка для очистки в положении для очистки.
8. Медицинский ручной инструмент (1) по п. 7, отличающийся тем, что положение для очистки соответствует собранному положению двух ручных рычагов (2, 8).
9. Медицинский ручной инструмент (1) по любому из пп. 1-8, отличающийся тем, что поворот двух ручных рычагов (2, 8) относительно друг друга ограничен стопорным механизмом, который расположен на участках захвата (3, 9).
10. Медицинский ручной инструмент (1) по любому из пп. 1-9, отличающийся тем, что рабочий участок (4) первого ручного рычага (2) и рабочий участок (10) второго ручного рычага (8) являются одинаковыми или разными по конструкции.
| DE 202013010321 U1, 15.01.2014 | |||
| RU 2013148076 A, 27.11.2015 | |||
| DE 202011107977 U1, 30.11.2011 | |||
| US 1973569 A, 11.09.1934. |

