Исследуемое техническое решение относится к области геофизики, а именно к способам и устройствам, направленным на изучение характеристик глубинного строения и может быть применено для сейсмической разведки [G01V 1/02, G01V 3/12, G01V 3/15, G01V 3/17].
Основной потенциал прироста запасов углеводородов в мире XXI века – это сложно построенные и трудноизвлекаемые месторождения нефти и газа. Необходима ревизия и корректировка существующих подходов к работам на нефть и газ, так как существующие геофизические технологии изучения геологического строения и прогноза высокодебитных блоков месторождений не соответствует сложности геолого-геофизических условий.
Нефтяные компании проводят сейсмическую разведку для понижения уровня рисков и снижения стоимости работ по обнаружению и разработке новых нефтяных и газовых месторождений. Традиционная сейсмическая разведка проводится путем развертывания на местности линейных профильных или пространственных сетей сейсмических приемников (датчиков), покрывающих значительные участки земной поверхности. Источник упругой волны приводится в действие внутри такой сети, и возникающая в результате воздействия на среды акустическая волна распространяется по поверхности и внутрь земной коры. Отдельные части упругой волны отражаются от подземных неоднородностей, таких как нефтяные и газовые пластовые резервуары. Процессы возбуждения отраженных волн и записи информации об их распространении обозначаются термином "сбор сейсмических данных". С помощью перемещения источника сейсмической энергии в границах измерительной сети и сбора сейсмических данных возможно построение трехмерной карты или глубинных разрезов подземной структуры земной коры, которая в дальнейшем используется для принятия решений о месте заложения буровых скважин и глубинах продуктивных зон.
Поиск и разведка так называемых сложно устроенных, малоразмерных месторождений углеводородов требуют от сейсморазведочных исследований внедрения технологических приемов, повышающих вертикальную и горизонтальную разрешающую способность метода. Общепринятый способ – это отказ от традиционного группирования источников и приемников и использования точечного возбуждения с одновременным сгущением линий приема и возбуждения и непрерывной регистрацией регулярных и случайных сигналов без искажений.
Технология сбора сейсмических данных на конкретном участке месторождения рассчитана на заданную проектом точность и обычно ограничена особенностями сейсмогеологического разреза среды, условиями производства работ, экологическими требованиями и экономическими факторами. Повышение производительности получения исходных данных сокращает операционные расходы и одновременно повышает достоверность и детальность сейсмических исследований и кондиционность геологических моделей.
Важным фактором при определении качества и пространственного разрешения сейсмического изображения является выбор источника упругих волн. Традиционные взрывные и импульсные невзрывные источники прямого ударного действия по способу и физике формирования упругих колебаний на поверхности различных сред обеспечивают высокое разрешение сейсмических сигналов, но не могут составить конкуренцию вибрационным источникам из-за сложности контроля за фазовой и амплитудной идентичностью одиночных воздействий, а также по экономическим показателям.
Современные высокоплотные системы наблюдений используют способы и методы вибрационного возбуждения. Вибрационный источник создаёт на поверхности среды импульсы давления за 15 – 60 секунд от 3 до 120 Гц с амплитудой до 30 тонн. Излучатель монтируется на тягаче повышенной проходимости и позволяет получать много раз воспроизводимый сигнал. Для ускорения сбора геофизических данных разработаны и внедрены в производство технологии поочерёдного возбуждения сигналов (flip-flop), перекрывающихся сигналов (slip-sweep), независимого возбуждения сигналов (ISS) и их комбинации, что сокращает время возбуждения упругих волн в сети.
Известна ТРЕХМЕРНАЯ СЕЙСМОРАЗВЕДКА С ИСПОЛЬЗОВАНИЕМ НЕСКОЛЬКИХ ИСТОЧНИКОВ ОДНОВРЕМЕННО [CA2185751 (A1), опубл.: 21.02.1998], характеризующаяся одновременным излучением сигналов с плавающей частотой от множества вибраторов или групп вибраторов N, и включает в себя следующие шаги в комбинации: a) выбор желаемой начальной частоты и конечной частоты сигналов развертки частоты; b) выбор максимального времени; c) выбор или наблюдение для типичного вибратора или группы вибраторов связи между основной частотой развертки и временем развертки; d) выведение для указанного отношения частотно-временного пространства между указанным отношением и назначенной гармоникой такого отношения; e) деление упомянутого частотно-временного пространства на N разделов, каждый из которых имеет экстент частоты от упомянутой начальной частоты до упомянутой конечной частоты, и каждый имеет интервал времени на каждой частоте, не менее указанного максимального времени в пути; f) назначение каждого из N вибраторов или групп вибраторов одному из указанных N разделов; и g) управляют частотно-временным отношением каждого вибратора или группы вибраторов так, чтобы все сейсмические сигналы, полученные из него, вплоть до указанного максимального времени пробега, попадали в его упомянутую раздел.
Недостатком аналога является низкая оперативность измерений, обусловленная неподвижным размещением источников сигналов.
Наиболее близким по технической сущности является СПОСОБ И СИСТЕМА ДЛЯ СБОРА СЕЙСМИЧЕСКИХ ДАННЫХ [RU2008107174 (A), опубл.: 10.10.2009], относящихся к подземной области, на поверхности которой расположены набор приемников сейсмических волн, находящихся в контакте с землей, записывающее устройство для записи сигналов, выдаваемых приемниками, и набор источников вибрации, следующих по соответствующим заранее определенным траекториям, причем каждая из траекторий содержит ряд положений генерирования возбуждений, при этом указанные источники выполнены с возможностью генерирования, при нахождении в положении генерирования возбуждений, сейсмических вибраций, соответствующих последовательности возбуждений типа свип-сигнала заранее определенной длительности и переменной частоты, включающий в себя шаг синхронизации часов источников и записывающего устройства и шаг выдачи каждому из источников разрешения на генерирование возбуждений в соответствующие последовательности заранее определенных моментов времени tk,n возбуждения, где k - порядковый номер возбуждения для данного источника, a n - порядковый номер источника, находящийся в пределах от 1 до числа Ns источников, при этом на указанном шаге выдачи разрешения источникам вибрации осуществляют генерирование колебаний при условии, что в указанное время tk,n источник находится в состоянии готовности к генерированию вибраций, и осуществляют непрерывную запись сигналов, выдаваемых приемниками.
Основной технической проблемой прототипа является низкая эффективность применения указанного способа, обусловленная ограничением спектра сигнала диапазоном частот свипирования и уровнем гармонических и фазовых искажений, при этом данный способ обладает высокой трудоемкостью, обусловленной значительными затратами времени на поиск заданной точки возбуждения, временем установки вибратора и подготовку его к работе.
Задачей изобретения является устранение недостатков прототипа.
Техническим результатом изобретения является повышение производительности сбора и обработки сейсмических данных с высокой разрешающей способностью.
Указанный технический результат достигается за счет того, что способ сбора сейсмических данных, характеризующийся воздействием на исследуемую поверхность источниками сейсмических сигналов, следующих по заранее определенным траекториям, синхронизацией часов источников и записывающего устройства и непрерывную запись сигналов, выдаваемых приемниками, отличающийся тем, что перед сбором сигналов задают количество одновременно работающих источников сигналов N и траектории их перемещения, плотность возбуждения на единицу длины траектории движения ni каждого из Ni-источников сигнала, амплитуду сигнала А0N и уровень случайных помех Аш, для каждого из Ni-источников сигналов вычисляют и задают начальную скорость движения V0i= fсi / ni, где fсi - частота повторения импульсов каждого из Ni-источников сигналов, при этом fсi = 1/Tготi, где Tготi – период готовности источника сигнала к повторному возбуждению, определяют координаты каждого из приемников сигналов, в процессе перемещения источников сигналов воздействуют на поверхность импульсами с заданной частотой повторения fсi и амплитудой А0i, на регистрируемой приемниками непрерывной записи выделяют времена прихода упругих волн tпрni от каждого из Ni-источников сигналов и их амплитуды Аni, определяют соотношения сигнал/шум Аni/Аш, сопоставляют полученные данные с данными о временах импульсов tkn от каждого из Ni-источника сигналов и координатах xkn и ykn каждого из импульсов, определяют распределение скоростей сигналов в земной поверхности и строят модель земной поверхности, при этом при уменьшении соотношения сигнал/шум Аni/Аш увеличивают плотность возбуждения ni и их амплитуды А0i без остановки перемещения источников сигналов.
В частности, перемещение источников сигналов осуществляют непрерывно.
В частности, распределение скоростей сигналов в земной поверхности определяют по разности времен пробегов tпрn-tkn упругих волн от источников сигналов до каждого из приемников.
Указанный технический результат достигается за счет того, что система сбора сейсмических данных, содержащая приемники сигналов, записывающее устройство и источники сигналов, отличающаяся тем, что содержит, как минимум, один источник сигналов, выполненный в виде невзрывного импульсного источника упругих колебаний смонтированном на подвижной платформе, размещенной в контакте с исследуемой поверхностью, к источнику сигналов подключены записывающее устройство, датчик измерения скорости, модуль местоположения, смонтированные на одной с источников сигналов платформе, один или несколько приемников сигналов подключены к блоку сбора данных, записывающие устройства и блоки сбора данных соединены модулями связи со станцией управления и сбора данных, включающей контроллер, регистрирующее устройство, модуль обработки данных, интерфейсный модуль для отслеживания местонахождения источника сигналов, скорости его движения и технического состояния источника и приемников сигналов, модуль синхронизации источников сигналов и датчик ветра для регистрации шумовых помех.
В частности, подвижная платформа смонтирована на транспортном средства.
В частности, подвижная платформа выполнена в зацеплении с транспортным средством.
В частности, приемники сигналов выполнены в виде приемников сейсмических сигналов.
В частности, модуль местоположения выполнен в виде GPS-приемника.
В частности, модуль обработки данных выполнен в виде ПЭВМ.
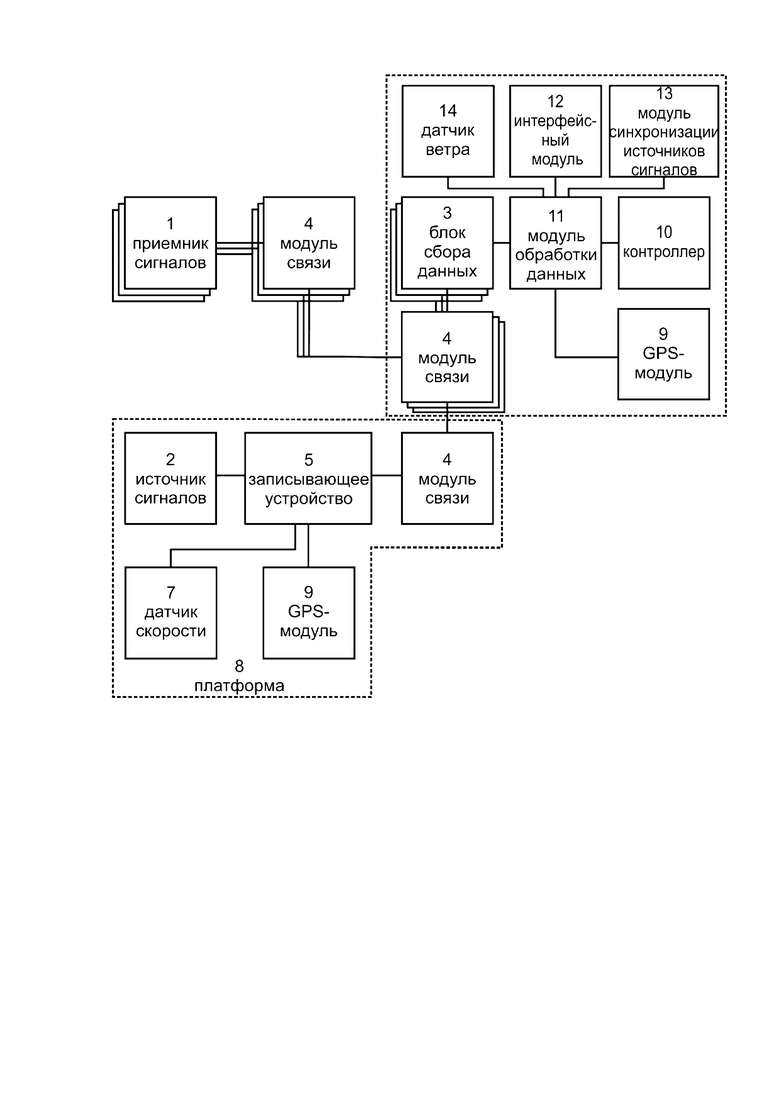
На фигуре показана блок-схема системы сбора сейсмических данных, на которой обозначено: 1 – приемники сигналов, 2 –источники сигналов, 3 – блоки сбора данных, 4 – модули связи, 5 – записывающие устройства, 6 – станция управления и сбора данных, 7 – датчики скорости, 8 – платформа, 9 – GPS-модули, 10 – контроллер, 11 – модуль обработки данных, 12 – интерфейсный модуль, 13 – модуль синхронизации источников сигналов, 14 – датчик ветра.
Осуществление изобретения.
Система сбора сейсмических данных содержит источники сигналов 2, выполненные в виде невзрывных импульсных источников упругих колебаний. Каждый из источников сигналов 2 смонтирован на транспортном средстве или в зацеплении с транспортным средством и выполнен в непосредственном контакте с исследуемой поверхностью или с поверхностью, соприкасающуюся с исследуемой (лед, водная среда, снег), например, в металлических полозьях саней, на волокуша, на дне судна.
Каждый из источников сигналов 2 подключен к записывающему устройству 5 к которому, в свою очередь, подключены смонтированные на одной с источником сигналов 2 платформе 8 датчик скорости 7, GPS-модуль 9 и модуль связи 4.
Записывающие устройства 5 через модули связи 4 подключены к станции управления и сбора данных 6.
Станция сбора и обработки данных 6 содержит контроллер 10 с подключенным к нему модулем обработки данных 11 и регистрирующими устройствами, выполненными в виде блоков сбора данных 3 для обработки сигналов от приемников сигналов 1 также соединенными с модулем обработки данных 11. К модулю обработки данных 11 подключен интерфейсный модуль 12, модуль синхронизации источников сигналов 13, GPS-модуль 9 и датчик ветра 14.
Приемники сигналов 1 смонтированы непосредственно на исследуемой земной поверхности с возможностью регистрации сейсмических сигналов. Каждый из приемников сигналов 1 или приемники сигналов 1, объединенные в группу подключены к блокам сбора данных 3 через модули связи 4.
Систему сбора сейсмических данных реализуют следующим образом.
Первоначально на исследуемой местности размещают приемники сигналов 1, определяют потребность в количестве одновременно работающих источников сигналов N 2, размещенных на транспортном средстве или в зацеплении с ними. Определяют траектории движения источников сигналов 2 и их протяженности.
Получают от GPS-модулей 9 и записывают в станцию управления и сбора данных 6 координаты размещения каждого из приемников сигналов 1.
Далее исходя из требуемого разрешения сейсмограмм определяют плотность возбуждения на единицу длины траектории движения ni каждого из Ni-источников сигналов 2, амплитуду сигнала А0N и уровень случайных помех Аш.
Зная частоту повторения импульсов fсi каждого из Ni-источников сигналов 2, обратно пропорциональной периоду готовности источника сигнала 2 к повторному возбуждению Tготi определяют начальную скорость для каждого из источников сигналов 2 по формуле V0= fс / n.
Например,
пусть n = 200 имп/км;
fсi = 0,1 имп/сек при Tготi = 10 сек;
тогда,
V = 0,1/200 = 0,0005 км/с = 1,8 км/ч.
От контроллера 10 станции управления и сбора данных 6 через модули связи 4 подают команду на включение и синхронизацию по времени с помощью GPS-модулей 9 источников сигналов 2 и модуля обработки данных 11. После синхронизации от источников сигналов 2 и модуля обработки данных 11 на контроллер 10 станции управления и сбора данных 6 и визуально на интерфейсный модуль 12 поступают сигналы о готовности источников сигналов 2 к работе.
Контроллер 10 станции управления и сбора данных 6, получив сигналы о готовности к работе, запускает записывающие устройства 5 и блоки сбора данных 3 и одновременно или синхронно с помощью модуля синхронизации источников сигналов 13 направляет команду на первый удар одного из источников сигналов 2 и дальнейшее его движение с рассчитанной скоростью V0. Записывают в записывающем устройствах 5 источника сигнала 2 время его запуска t0n.
Через промежуток времени, например, равный времени прихода отраженной сейсмической волны от предельно глубокого горизонта изучаемой подземной структуры (время тишины), запускают второй источник сигналов 2 на удар и движение с расчетной скоростью V0. Подобным образом поочередно запускают все источники сигналов 2.
В процессе непрерывного перемещения каждого из источников сигналов 2 с заданной частотой повторения импульсов fсi или командой от контроллера 10 станции управления и сбора данных 6 воздействуют на поверхность грунта импульсами, длительностью до 10 мс с начальной амплитудой А0, пропорциональной величине удельного давления источника сигналов 2 на грунт. Записывают в записывающее устройство 5 амплитуду импульсов А0, время подачи импульсов tkn, отсчитанное от начального времени t0n, номер kn и координаты точек воздействия импульсов xkn и ykn, где n - порядковый номер источника сигнала 2. Упругая волна от источника сигналов 2 в грунте преобразуется в объемную сейсмическую волну со скоростью распространения от 2,5 до 8 км/с в зависимости от плотности и упругости среды распространения, при этом при прохождении границы сред с разными упругими постоянными упомянутая волна преломляется и меняет свое направление и амплитуду. Приемниками сигналов 1 регистрируют пришедшую от источника сигналов 2 сейсмический сигнал и передают информацию через модули связи 4 в блоки сбора данных 3, в которых записывают времена прихода сейсмических волн tпрni от источника сигналов 2 и их амплитуды Аni. Из блоков сбора данных 3 указанную информацию передают в модуль обработки данных 11 станции управления и сбора данных 6.
В модуле обработки данных 11 станции управления и сбора данных 6 полученные данные о времени подачи импульсов tkn и координатах точек воздействия импульсов xkn и ykn каждого из источников сигналов 2 с учетом скорости перемещения источника сигналов 2, полученных от датчика скорости 7 сопоставляют с временами прихода сейсмических волн tпрn от каждого из источников сигналов 2 и их амплитудами Аn, анализируют зависимости Аn от времени tkn и изменение частоты сигнала и вычисляют отношение сигнал/шум Аni/Аш. По разности времен пробегов tпрn-tkn сейсмических волн от каждого из источников сигналов 2 до каждого из приемников 1 и величине затухания А0-Аn определяют распределение скоростей вдоль земной поверхности и в глубину, а с учетом известных скоростей распространения сейсмических волн в упругой среде формируют амплитудно-частотную спектрограмму.
При уменьшении соотношения сигнал/шум Аni/Аш, увеличивают степень воздействия источника сигналов 2 на поверхность путем увеличения удельного давления источника сигналов 2 на поверхность или снижения скорости движения V источника сигналов 2, тем самым увеличивают плотность возбуждения n.
Заявленный технический результат - повышение производительности сбора и обработки сейсмических данных с высокой разрешающей способностью, достигается за счет воздействия на исследуемую поверхность или поверхность, непосредственно соприкасающуюся с исследуемой поверхностью с заданными плотностью возбуждения на единицу длины траектории движения n и частотой повторения импульсов fс, как минимум, одним источником сигналов 2, выполненным в виде невзрывного импульсного источника упругих колебаний, смонтированного подвижно на транспортном средстве, движущегося по заданной траектории с рассчитанной скоростью V, привязкой упомянутых источников сигналов 2 по времени и координатам воздействия на грунт с помощью GPS-модулей 9, смонтированных вблизи источников сигналов 2, непрерывной передачей и записью в блоках сбора данных 3 и обработкой в модуле обработки данных 11 зарегистрированных приемниками сигналов 1, определения в процессе записи соотношения сигнал/шум Аni/Аш, сопоставления полученных данных с данными о временах импульсов tkn и координатах xkn и ykn воздействия каждым из источников сигналов 2 и построения спектральных характеристик распределения сейсмических волн, а при уменьшении соотношения сигнал/шум Аni/Аш оперативного увеличения плотностью возбуждения на единицу площади n путем изменения скорости движения V источника сигналов 2 и амплитуды А0 сигнала (удельного давления на грунт) без остановки движения источников сигналов 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и система сбора сейсмических данных | 2023 |
|
RU2814806C1 |
| СПОСОБ ИЗЛУЧЕНИЯ ПОПЕРЕЧНЫХ СЕЙСМИЧЕСКИХ ВОЛН | 2011 |
|
RU2478989C2 |
| СИСТЕМА СБОРА СЕЙСМИЧЕСКИХ ДАННЫХ | 2021 |
|
RU2777271C1 |
| СПОСОБ МОРСКОЙ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2388023C1 |
| ОЦЕНИВАНИЕ СВОЙСТВ ПОЧВЫ С ИСПОЛЬЗОВАНИЕМ ВОЛНОВЫХ СИГНАЛОВ СЕЙСМИЧЕСКИХ ПОВЕРХНОСТНЫХ ВОЛН | 2009 |
|
RU2503035C2 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ ЗОН РАСТРЕСКИВАНИЯ ГОРНЫХ ПОРОД В ПРОЦЕССЕ ГИДРОРАЗРЫВА | 2005 |
|
RU2282876C1 |
| СИСТЕМА И СПОСОБ СБОРА СЕЙСМИЧЕСКИХ ДАННЫХ | 2015 |
|
RU2598622C1 |
| СПОСОБ РЕГИСТРАЦИИ СЕЙСМИЧЕСКИХ СИГНАЛОВ НА АКВАТОРИИ МОРЯ ПРИ ПОИСКЕ ПОДВОДНЫХ ЗАЛЕЖЕЙ УГЛЕВОДОРОДОВ | 2011 |
|
RU2483330C1 |
| СПОСОБ ОПЕРАТИВНОГО ИССЛЕДОВАНИЯ АТМОСФЕРЫ, ЗЕМНОЙ ПОВЕРХНОСТИ И ОКЕАНА | 2010 |
|
RU2436134C1 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ ПРИ ПОИСКЕ УГЛЕВОДОРОДОВ И СЕЙСМИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2431868C1 |
Предложенное техническое решение относится к области геофизики, а именно к способам и устройствам, направленным на изучение характеристик глубинного строения, и может быть применено для сейсмической разведки. Предложен способ сбора сейсмических данных, характеризующийся воздействием на исследуемую поверхность источниками сейсмических сигналов, следующих по заранее определенным траекториям, синхронизацией часов источников и записывающего устройства и непрерывной записью сигналов, выдаваемых приемниками. Причем перед сбором сигналов задают количество одновременно работающих источников сигналов N и траектории их перемещения, плотность возбуждения на единицу длины траектории движения ni каждого из Ni-источников сигнала, амплитуду сигнала А0N и уровень случайных помех Аш. Для каждого из Ni-источников сигналов вычисляют и задают начальную скорость движения V0i= fсi / ni, где fсi - частота повторения импульсов каждого из Ni-источников сигналов, при этом fсi = 1/Tготi, где Tготi – период готовности источника сигнала к повторному возбуждению. Определяют координаты каждого из приемников сигналов, а в процессе перемещения источников сигналов воздействуют на поверхность импульсами с заданной частотой повторения fсi и амплитудой А0i. На регистрируемой приемниками непрерывной записи выделяют времена прихода упругих волн tпрni от каждого из Ni-источников сигналов и их амплитуды Аni. Определяют соотношения сигнал/шум Аni/Аш, сопоставляют полученные данные с данными о временах импульсов tkn от каждого из Ni-источников сигналов и координатах xkn и ykn каждого из импульсов. Определяют распределение скоростей сигналов в земной поверхности и строят модель земной поверхности, при этом при уменьшении соотношения сигнал/шум Аni/Аш увеличивают плотность возбуждения ni и их амплитуды А0i без остановки перемещения источников сигналов. Технический результат - повышение производительности сбора и обработки сейсмических данных с высокой разрешающей способностью. 2 н. и 7 з.п. ф-лы, 1 ил.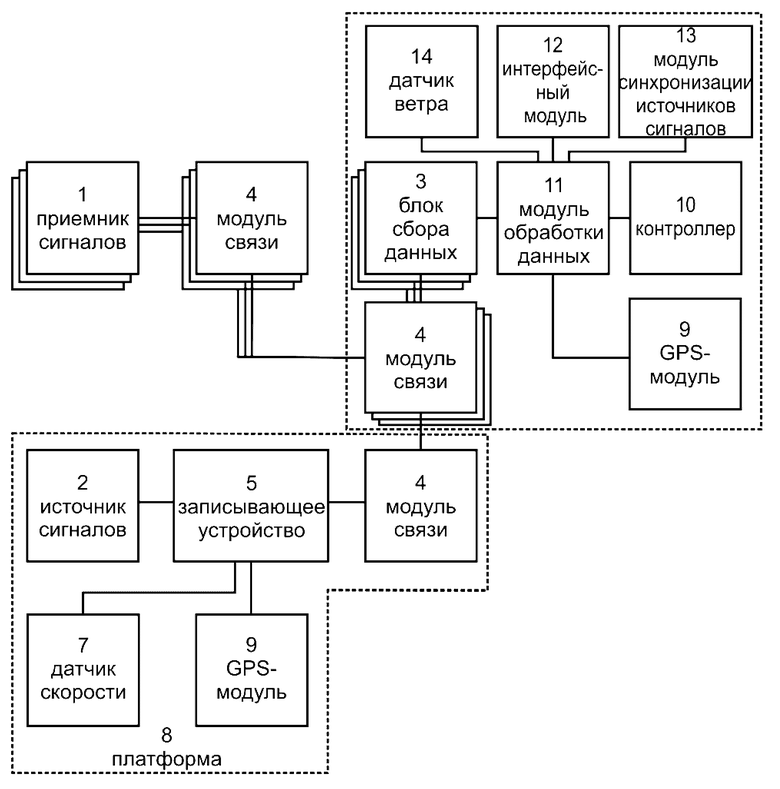
1. Способ сбора сейсмических данных, характеризующийся воздействием на исследуемую поверхность источниками сейсмических сигналов, следующих по заранее определенным траекториям, синхронизацией часов источников и записывающего устройства и непрерывной записью сигналов, выдаваемых приемниками, отличающийся тем, что перед сбором сигналов задают количество одновременно работающих источников сигналов N и траектории их перемещения, плотность возбуждения на единицу длины траектории движения ni каждого из Ni-источников сигнала, амплитуду сигнала А0N и уровень случайных помех Аш, для каждого из Ni-источников сигналов вычисляют и задают начальную скорость движения V0i= fсi / ni, где fсi - частота повторения импульсов каждого из Ni-источников сигналов, при этом fсi = 1/Tготi, где Tготi – период готовности источника сигнала к повторному возбуждению, определяют координаты каждого из приемников сигналов, в процессе перемещения источников сигналов воздействуют на поверхность импульсами с заданной частотой повторения fсi и амплитудой А0i, на регистрируемой приемниками непрерывной записи выделяют времена прихода упругих волн tпрni от каждого из Ni-источников сигналов и их амплитуды Аni, определяют соотношения сигнал/шум Аni/Аш, сопоставляют полученные данные с данными о временах импульсов tkn от каждого из Ni-источников сигналов и координатах xkn и ykn каждого из импульсов, определяют распределение скоростей сигналов в земной поверхности и строят модель земной поверхности, при этом при уменьшении соотношения сигнал/шум Аni/Аш увеличивают плотность возбуждения ni и их амплитуды А0i без остановки перемещения источников сигналов.
2. Способ по п.1, отличающийся тем, что перемещение источников сигналов осуществляют непрерывно.
3. Способ по п.1, отличающийся тем, что распределение скоростей сигналов в земной поверхности определяют по разности времен пробегов tпрn-tkn упругих волн от источников сигналов до каждого из приемников.
4. Система сбора сейсмических данных, содержащая приемники сигналов, записывающее устройство и источники сигналов, отличающаяся тем, что содержит, как минимум, один источник сигналов, выполненный в виде невзрывного импульсного источника упругих колебаний, смонтированного на подвижной платформе, размещенной в контакте с исследуемой поверхностью, к источнику сигналов подключены записывающее устройство, датчик измерения скорости, модуль местоположения, смонтированные на одной с источников сигналов платформе, один или несколько приемников сигналов подключены к блоку сбора данных, записывающие устройства и блоки сбора данных соединены модулями связи со станцией управления и сбора данных, включающей контроллер, регистрирующее устройство, модуль обработки данных, интерфейсный модуль для отслеживания местонахождения источника сигналов, скорости его движения и технического состояния источника и приемников сигналов, модуль синхронизации источников сигналов и датчик ветра для регистрации шумовых помех.
5. Система по п.4, отличающаяся тем, что подвижная платформа смонтирована на транспортном средства.
6. Система по п.4, отличающаяся тем, что подвижная платформа выполнена в зацеплении с транспортным средством.
7. Система по п.4, отличающаяся тем, что приемники сигналов выполнены в виде приемников сейсмических сигналов.
8. Система по п.4, отличающаяся тем, что модуль местоположения выполнен в виде GPS-приемника.
9. Система по п.4, отличающаяся тем, что модуль обработки данных выполнен в виде ПЭВМ.
| WO 2007025933 A1, 08.03.2007 | |||
| СОЛЬ ПИЩЕВАЯ АНТИГИПЕРТЕНЗИВНАЯ | 2000 |
|
RU2185751C2 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ | 1996 |
|
RU2122220C1 |
| US 9217796 B2, 22.12.2015 | |||
| WO 2015061636 A1, 30.04.2015 | |||
| Способ пространственной сейсморазведки | 1989 |
|
SU1749861A1 |

