Область техники
Изобретение относится к нефтегазодобывающей промышленности и может быть применено для доставки геофизических приборов и оборудования в горизонтальные участки обсаженных скважин в условиях наличия в них значительных локальных сужений внутреннего сечения ствола и необходимости работы через лубрикатор.
Уровень техники
Известно колесное устройство для доставки приборов в горизонтальную скважину (патент РФ №2487230, МПК Е21В 23/14, публ.03.05.2011), с помощью которого реализован простейший способ доставки приборов и оборудования в горизонтальный участок, при помощи устройства, содержащего цилиндрический корпус с установленным в нем электродвигателем, шарнирно установленными расклинивающими опорами, и по крайней мере одну секцию с движителем, выполненным в виде установленных в корпусе колес с радиусом закругления, равным радиусу исследуемой скважины. Согласно изобретению, устройство снабжено насосом, приводом от электромотора, гидромотором с цепным приводом на ведущие колеса, а также активатором расклинивающих опор. Ведущие колеса размещены на расклинивающих опорах. Кроме того, в корпусе устройства может быть установлен дополнительный электродвигатель для активатора расклинивающих опор. Передвижение устройства осуществляется по команде от наземного оборудования: сначала на расклинивание опор, для поджатия колес к стенке колонны, а затем, на включение двигателя вращающего колеса вперед или назад.
Недостаток известного способа передвижения заключается в отсутствии контроля за усилием прижатия и диаметром раскрытия расклинивающих опор, отсутствие быстрой телеметрической системы, обеспечивающей управление в реальном времени рабочими параметрами устройства. Что делает проблематичным передвижение устройства в усложненных условиях с наличием сильных локальных сужений.
Ближайшим аналогом заявленного способа передвижения является способ передвижения, реализуемый при работе устройства по патенту РФ № 2707610 (МПК Е21В 23/14, публ. 26.12.2018), содержащим две колесные движительные секции, прижимаемые к стенке обсадной колонны движителями-активаторами, имеющие нижний и верхний центраторы, обеспечивающие устойчивое положение, блок электроники, выполненный в виде модульной конструкции, подключаемый через геофизический кабель к наземной ЭВМ каротажной системы, снабженный программой управления движением и регистрацией параметров от блока датчиков, размещенных в блоке электроники, а именно, акселерометров, датчика натяжения кабеля и температурного датчика, реализована возможность подключения каротажных приборов и для поджима колес к обсадной колонне и приведения трактора в движение используется бесколлекторные двигатели постоянного тока. Реализуется способ передвижения данного трактора, в котором из наземной каротажной системы подаются команды на открытие и закрытие прижимных механизмов колес и также по командам обеспечивается их вращение в нужную сторону, при этом наземной каротажной системой регистрируются показания датчиков натяжения кабеля, датчиков ускорения (акселерометров), и датчика температуры для контроля за параметрами передвижения.
Недостаток известного способа передвижения связан с отсутствием контроля сцепления ведущих колес с обсадной трубой, и оперативного воздействия на процесс движения, т.е. здесь не предусмотрены такие операции поскольку отсутствуют датчики усилия прижатия колес и датчики диаметра раскрытия расклинивающих опор прижимного механизма. Такой способ исключает автоматизацию процесса передвижения. Передвижение устройства происходит «вслепую». Наличие осложненных условий: больших сужений ствола, вызванных особенностями конструкции обсадных колонн или наличием внутри насыпей пропанта и песка, а также наростами отложений гидратов, солей, цемента и прочего, будет существенно затруднять передвижение, а зачастую делает его невозможным, что часто отмечают профессионалы, работающие с подобными устройствами. Поэтому проведение работ известными скважинными тракторами сопровождает дорогостоящая операция по очистке ствола скважины, а наличие в скважине конструктивных сужений часто делает невозможным проведение работ и приводит к аварийным ситуациям.
Раскрытие изобретения
Задача, на решение которой направлено изобретение, заключается в повышении надежности, долговечности и эксплуатационной безопасности устройства.
Технический результат заключается в обеспечении безаварийного прохождения устройства в обсаженной скважине, в том числе в осложненных условиях – при наличии значительных сужений в горизонтальных стволах скважин, с обеспечением возможности прогнозирования предстоящих осложнений движения и возможности автоматизации процесса управления. Кроме того, использование предлагаемого изобретения позволит сделать устройство компактным, обеспечивая тем самым его применение при работах через распространенные лубрикаторы.
Достигается технический результат тем, что что в отличие известных способов доставки в предлагаемом способе для доставки приборов и оборудования в осложненные участки горизонтальных скважин используются специальные датчики измерения диаметра раскрытия расклинивающих опор с ведущими колесами и усилия прижатия ведущих колес к стенке колонны, что позволяет эффективно управлять процессом передвижения, обеспечивая сцепление ведущих колес и прогнозируя появление осложнений. Конструкция, при которой колесные секции оснащаются специальными датчиками, а колеса располагают равномерно по периметру поперечного сечения скважины, и тем самым обходятся без применения громоздких специальных центраторов, дает возможность применения способа передвижения при работе через лубрикатор.
За счет того, что колеса движительных секций располагаются равномерно по периметру поперечного сечения скважины, достаточно трех секций для надежной центровки устройства. За счет применения на рычагах, где установлены колеса датчиков диаметра, а на прижимных устройствах датчиков усилия прижатия, устройство обладает возможностью как бы осязаемо двигаться в осложненных участках скважины.
В предлагаемом изобретении возможно использование для проведения работ минимального числа секций, а именно одной колесной секции, фиг.2, тогда устройство оснащается двумя управляемыми центраторами с приводами и датчиками измерения диаметра раскрытия, а также электронной схемой с телеметрией для управления раскрытием и закрытием рычагов центратора и прогнозированием осложнения движения.
Таким образом, применение данного способа снижает аварийность проведения работ в осложненных участках скважин, обеспечивает возможность прогнозирования проблемных участков для движения, компактность и осязаемость движения, дает возможность проводить работы через большинство применяемых лубрикаторов. Расширяет возможности для проведения каротажных работ в осложненных условиях, где обычные устройства не дают хороших результатов или вообще не применяются.
Краткое описание чертежей
Изобретение поясняется описанием конкретного примера выполнения и прилагаемыми графическими материалами, где на:
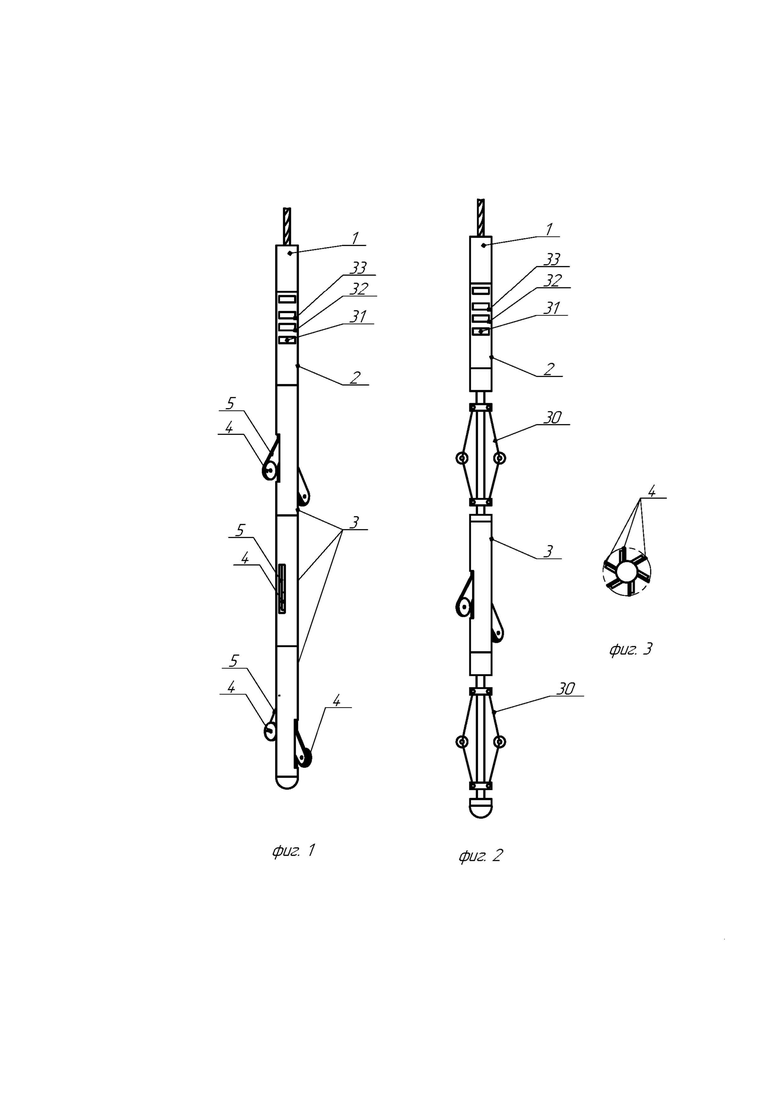
фиг. 1 схематично представлено предлагаемое колесное устройство для доставки приборов и оборудования в горизонтальные участки обсаженных скважин;
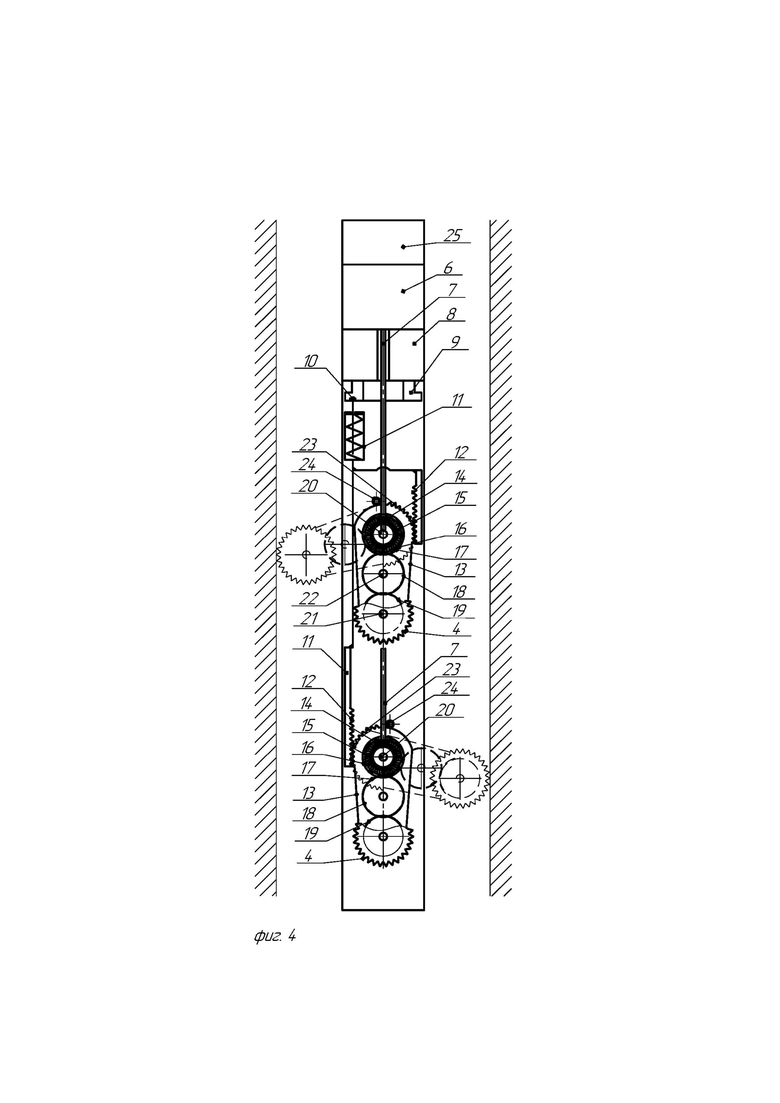
фиг. 2 – вариант устройства, оснащенного управляемым центраторами;
фиг. 3 – расположение колес устройства по сечению скважины;
фиг. 4 – схема колесной секции.
На представленных изображениях позициями отмечены следующие элементы устройства: 1 – кабельная головка; 2 – блок электроники; 3 - колесные секции; 4 – ведущие колеса; 5 – корпус колесной секции; 6 – привод ведущих колес; 7 – вал; 8 – привод прижима ведущих колес; 9 – шток привода прижима; 10 – датчики усилия прижатия; 11 – амортизаторы пружинные; 12 – рейка; 13 – расклинивающая опора; 14,15 – малая и большая шестерни конической передачи; 17,18,19 – зубчатые колеса; 20,21 – валики зубчатых колес; 22 – ось; 23 – зубчатый сектор; 24 – датчик диаметра раскрытия ведущих колес; 25 – электроника колесной секции; 30 – управляемые центраторы; 31 -– электронные узлы блока электроники; 32 – контроллер управления и быстрая телеметрия; 33– телеметрия для связи с наземной ЭВМ.
Осуществление изобретения
Способ управления движением колесного устройства доставки приборов и оборудования в горизонтальные участки скважин осуществляется с помощью блока электроники 2 (фиг. 1, 2), который содержит кабельную головку 1 с датчиком натяжения кабеля, системный блок питания 31, контроллер управления с двумя телеметрическими модемами связи 33 и 32: медленной, для работы через длинный геофизический кабель и быстрый, более 1 мбод, для управления в реальном времени приводами колесных секций и снятия показаний датчиков (датчики температуры, акселерометры, датчик локатора муфтовых соединений). Колесные секции 3 (фиг. 4), каждая из которых содержит два ведущих колеса - 4; корпус – 5, фиг.4; привод ведущих колес - 6; 7 – вал; 8 – полый привод прижима ведущих колес; 9 – шток привода прижима; 10 – датчик силы в основании штока привода прижима; 11 – амортизатор пружинный; 12 – рейку; 13 – расклинивающую опору; 14,15 – малую и большую шестерни конической передачи; 17,18,19 – зубчатые колеса; 20, 21 – валики зубчатых колес; 22 – ось; 23 – зубчатый сектор; 24 – датчик диаметра раскрытия ведущих колес в виде поворотного датчика Холла; 25 – электронику колесной секции. Колеса 15 и 17, а также 19 и 4 попарно связаны между собой жесткой связью. Привод прижима ведущих колес 8 имеет возможность полностью выбирать упругий ход амортизатора 11 и создавать максимальную прижимную силу, обеспечивая сцепление ведущих колес 4 с обсадной трубой.
Способ осуществляется с помощью колесного устройства доставки состоящего из одной и более колесных секций 3 (фиг. 4), оснащенных приводами 6 и 8, обеспечивающими прижатие и вращение ведущих колес 4, блока электроники 2, обеспечивающего управление приводами 6 и 8, включающего контроллер с телеметрической системой с модемом, обеспечивающим связь с наземной каротажной системой, снабженной программой управления движением устройства доставки и регистрацией параметров датчиков ускорения, движения (акселерометров), натяжения на кабельной головке и температуры. Колесные секции 3 устройства располагают таким образом, чтобы колеса поджимались к стенке обсадной колонны равномерно по периметру поперечного сечения для реализации центровки без специальных центрирующих устройств (фиг.3). Для регистрации контролируемого перемещения расклинивающие опоры 13, на которых установлены ведущие колеса 4, оснащают датчиками диаметра раскрытия колес 24, приводы прижима 8, обеспечивающие прижатие колес, оснащают датчиками усилия прижатия 10. Электроника 25 каждой колесной секции 3 содержит контроллер для управления двигателями и работы с датчиками диаметра, и усилия прижатия, а также быструю телеметрию для связи в реальном времени между блоком электроники 2 и другими секциями. Блок электроники 2 содержит контроллер 32, обеспечивающий управление в реальном времени через быструю телеметрию двигателями колесных секций и сбор информации от всех применяемых датчиков, а также медленную телеметрию, обеспечивающую связь через каротажный кабель с бортовым компьютером наземной каротажной системы и все необходимые преобразователи для питания электронных узлов и приводов.
Компактность устройства, необходимая для работы через лубрикатор обеспечивается применением секционной конструкции, где в каждой из применяемых секций находится по крайней мере одно колесо, электронная схема, включающая контроллер для управления двигателями и работы с датчиками диаметра и усилия прижатия, а также быстрой телеметрической системой для обеспечения связи в реальном времени между блоком электроники 2 и другими модулями, кроме этого приводы прижатия и вращения ведущих колес размещены соосно, причем по крайней мере один из них выполнен полым, именно привод прижима 8.
Движением устройства управляют при помощи наземной каротажной системы, включающей в себя, лебедку с каротажным кабелем, блок управления с бортовым компьютером и блоком питания. Бортовой компьютер каротажной системы снабжен специальными программами управления движением устройства доставки и регистрации значений параметров, используемых в устройстве датчиков и каротажных данных из «пассажирских» доставляемых в скважину геофизических приборов.
Перед началом проведения работ, на устье скважины осуществляется сборка устройства доставки, соединение его с каротажным кабелем и «пассажирским» геофизическим прибором для проведения каротажа. Затем с помощью наземной каротажной системы осуществляется проверка и тестирование подключенной аппаратуры, в случае положительного результата, с помощью лебедки осуществляется спуск сборки в скважину к интервалу исследования. В случае работы через лубрикатор, выбирается компоновка с размерами сборки по длине, помещающейся в лубрикатор, это устройство для передвижения длиной не более 4,5 м с тремя колесными секциями 3, что достаточно для хорошей его центровки и каротажным прибором до трех метров длины. Все это после тестирования помещается в герметичную камеру лубрикатора, герметезируется, после чего заслонка камеры лубрикатора открывается, давление в камере выравнивается, устройство доставки включается, колеса поджимаются к стенке колонны и на малой скорости устройство с прибором передвигают вниз, преодолевая сопротивление трения кабеля в герметичном уплотнении лубрикатора, движение осуществляется до тех пор, пока тяжесть приборов с кабелем не станет больше сопротивления трения, далее колеса 4 устройства складывают в транспортировочное положение и движение продолжается под собственным весом связки до конструкционных осложнений движения, как правило, это до входа в горизонтальный участок, который начинается с переходом на колонну с меньшим диаметром. Контроль движения осуществляется с помощью датчиков акселерометров, локатора муфт, блока электронного и глубиномеров на каротажной системе и лебедке.
Для поджатия колес 4 к стенке колонны (фиг. 4) включается привод прижима 8 и перемещает по оси устройства шток 9, амортизаторы 11 и рейки 12, которые заставляют вращаться зубчатые сектора 23 вместе с расклинивающимися опорами 13 вокруг валов 20, которые одновременно выполняют функцию осей опор 13 и валов больших конических шестерен 15. Вращение опор 13 происходит вместе с установленными в опорах 13 шестернями 17, 18, 19, и ведущими колесами 4 до обеспечения заданного усилия прижатия, отслеживаемого датчиком силы 10. После чего привод прижима 8 выключается.
Движение устройства начинается с включения привода ведущих колес 6, который активирует вращение валов 7, затем конические шестерни 14,15 валы 20, связанные с ними шестерни 17,18, 19 и наконец ведущие колеса 4. Устройство приведено в движение.
В ходе движения отслеживаются показания датчиков силы 10 и показания датчиков диаметров 24 (в виде поворотного датчика Холла) на основании которых автоматически или по указанию оператора регулируется оптимальное движение устройства.
При движении в сильно наклонной или горизонтальной части колонны в условиях наличия в ней значительных технологических и иных сужений по внутреннему поперечному сечению колеса 4 прижимают к стенке обсадной колонны, приводят в движение соответствующими командами, при этом регистрируют показания всех имеющихся в наличии контрольных датчиков. Поскольку колесные секции 3 устройства расположены равномерно по периметру поперечного сечения скважины, оно надежно зацентрировано (фиг.3). Расклинивающие опоры 13 (фиг. 4), на которых установлены ведущие колеса 4, и прижимные устройства оснащены соответственно датчиками измерения диаметра и усилия прижатия и, таким образом, в процессе движения устройства осуществляют контроль и управление диаметром раскрытия и усилием прижатия каждого колеса, а для перемещения устройства в усложненных условиях, колеса поджимаются к внутренней стенке колонны с максимальным усилием, необходимым для обеспечения движения, при этом, усилия и диаметр раскрытия на переднем по движению колесе оперативно делают минимально необходимым для обеспечения центрации устройства и прохождению первого колеса через сужение. При необходимости, когда передние колеса тормозят движение, их складывают полностью. По мере продвижения через сужение, передние колеса опять максимально под контролем поджимают к стенке обсадной колонны, выбирая полностью упругий ход амортизаторов, помогая прохождению сужения, а следующие по порядку колеса последовательно прискладываются на основании показаний датчиков усилий и диаметра и, таким образом, осуществляют прохождение сужения колонны. Усилие прижатия ведущих колес можно увеличить до максимального, если выбрать упругий ход амортизатора, при этом усилие контролируется автоматикой и оператором. Для реверса движения все перечисленные операции осуществляют в обратном порядке.
Использование в устройстве одной колесной секций возможно при использовании управляемых центраторов 30 (фиг. 2), которые оснащены электроприводами для управляемого складывания, с датчиками диаметра раскрытия, измерения диаметра раскрытия, подпружиненную рычажную систему, электронную схему с контроллером управления и модемом быстрой телеметрии. В процессе прохождения сужения центраторы 30 последовательно складывают и затем раскрывают, используя показания датчиков.
Подъем устройства с прибором осуществляют с помощью каротажной лебедки, при необходимости помощь передвижению обеспечивается реверсивным движением устройства.
В настоящее время завершена разработка рабочих чертежей устройства диаметром 54 мм, радиус раскрытия рычагов до 220 мм, длина одной колесной секции 1,2 метра, которое оснащено всеми описанными датчиками и электронными узлами, разработаны программы управления для контроллеров и бортовой ЭВМ.
Предлагаемый способ дает возможность как бы осязаемо, с помощью встроенных датчиков, двигаться в осложненных условиях скважины, что по сравнению с известными аналогами снижает аварийность и увеличивает сферу применяемости, позволяет работать через основные типы лубрикаторов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ДОСТАВКИ ПРИБОРОВ И ОБОРУДОВАНИЯ В ОБСАЖЕННЫЕ СКВАЖИНЫ | 2020 |
|
RU2745495C1 |
| Скважинный трактор для проведения работ в обсаженных скважинах | 2018 |
|
RU2707610C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ РЫЧАЖНОГО УСТРОЙСТВА ДОСТАВКИ ПРИБОРОВ И ОБОРУДОВАНИЯ В ГОРИЗОНТАЛЬНЫЕ И СИЛЬНОНАКЛОННЫЕ УЧАСТКИ ОБСАЖЕННЫХ И НЕОБСАЖЕННЫХ СКВАЖИН | 2020 |
|
RU2739781C1 |
| УСТРОЙСТВО ДЛЯ ДОСТАВКИ ПРИБОРОВ В ГОРИЗОНТАЛЬНУЮ СКВАЖИНУ | 2005 |
|
RU2345210C2 |
| РЫЧАЖНОЕ УСТРОЙСТВО ДЛЯ ДОСТАВКИ ПРИБОРОВ И ОБОРУДОВАНИЯ В ГОРИЗОНТАЛЬНЫЕ СКВАЖИНЫ И ЕГО УЗЕЛ ФИКСАЦИИ | 2020 |
|
RU2742922C1 |
| УСТРОЙСТВО ДЛЯ ДОСТАВКИ ПРИБОРОВ В ГОРИЗОНТАЛЬНУЮ СКВАЖИНУ | 2008 |
|
RU2400621C2 |
| УСТРОЙСТВО ДЛЯ ДОСТАВКИ ПРИБОРОВ В ГОРИЗОНТАЛЬНУЮ СКВАЖИНУ | 2008 |
|
RU2394984C2 |
| УСТРОЙСТВО ДЛЯ ДОСТАВКИ ПРИБОРОВ В ГОРИЗОНТАЛЬНУЮ СКВАЖИНУ | 2007 |
|
RU2378487C2 |
| Устройство для доставки приборов в горизонтальную скважину | 2023 |
|
RU2820514C1 |
| УСТРОЙСТВО ДЛЯ ДОСТАВКИ ПРИБОРОВ В ГОРИЗОНТАЛЬНУЮ СКВАЖИНУ | 2002 |
|
RU2236549C2 |
Настоящее изобретение относиться к способу управления движением колесного устройства доставки приборов и оборудования в горизонтальные участки скважин. Техническим результатом является повышении надежности, долговечности и эксплуатационной безопасности устройства. Способ включает колесное устройство доставки, состоящее из одной и более колесных секций, оснащенных приводами вращения ведущих колес и приводами прижатия, которые прижимают ведущие колеса к стенке обсадной колонны, с помощью модема телеметрической системы связи с каротажной системой и приводят в движение соответствующими командами для осуществления движения по горизонтальному стволу скважины. Устройство регистрирует значение датчиков температуры, акселерометров, натяжения кабеля. Колесные секции располагают равномерно по периметру поперечного сечения скважины для эффективной центрации устройства при минимальных габаритах. Расклинивающие опоры, на которых установлены колеса, и прижимные устройства оснащают соответственно датчиками измерения диаметра и усилия прижатия. В процессе движения устройства доставки осуществляют контроль и управление диаметром раскрытия и усилием прижатия каждого колеса. Для перемещения устройства в усложненных условиях колеса поджимают к внутренней стенке колонны с максимальным усилием, необходимым для обеспечения движения, Усилие и диаметр раскрытия на переднем по движению колесе оперативно делают минимально необходимым для обеспечения центрации устройства и прохождения первого колеса через сужение. Передние колеса, тормозящие движение, складывают полностью, по мере продвижения через сужение передние колеса опять сильно поджимают к стенке обсадной колонны, помогая прохождению сужения. Следующие по порядку колеса последовательно прискладывают на основании показаний датчиков усилий и диаметра. 1 з.п. ф-лы, 4 ил.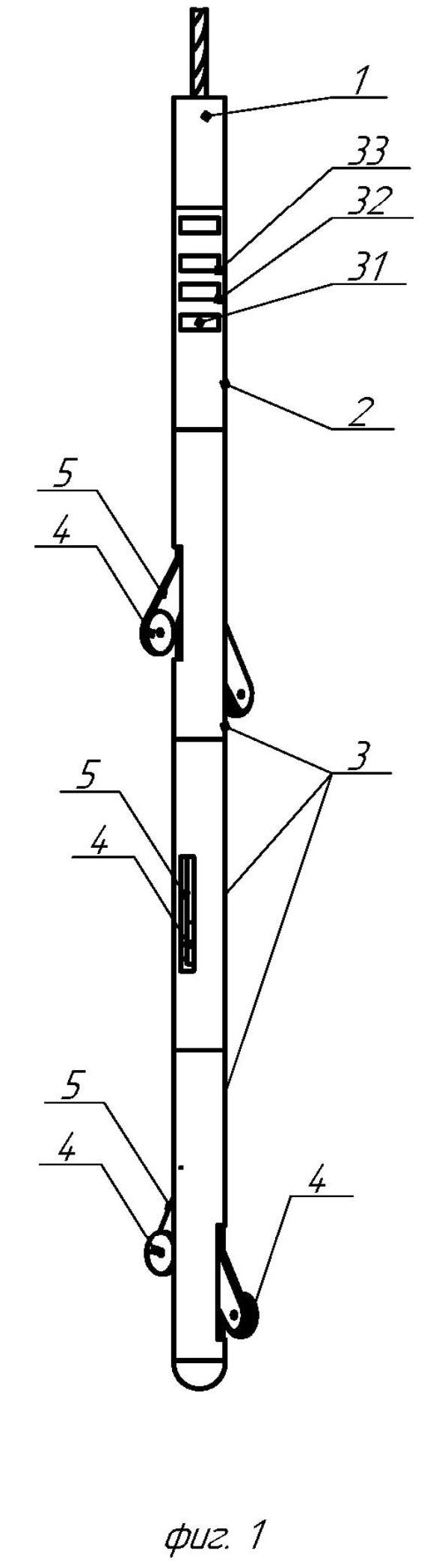
1. Способ управления движением колесного устройства доставки приборов и оборудования в горизонтальные участки скважин в условиях наличия в них значительных технологических и иных осложнений движения, в котором с помощью колесного устройства доставки, состоящего из одной и более колесных секций, оснащенных приводами вращения ведущих колес и приводами прижатия, которые прижимают ведущие колеса к стенке обсадной колонны, с помощью модема телеметрической системы связи с каротажной системой и приводят в движение соответствующими командами для осуществления движения по горизонтальному стволу скважины, при этом регистрируют значение датчиков температуры, акселерометров, натяжения кабеля, отличающийся тем, что колесные секции располагают равномерно по периметру поперечного сечения скважины для эффективной центрации устройства при минимальных габаритах, а расклинивающие опоры, на которых установлены колеса, и прижимные устройства оснащают соответственно датчиками измерения диаметра и усилия прижатия и таким образом в процессе движения устройства доставки осуществляют контроль и управление диаметром раскрытия и усилием прижатия каждого колеса, а для перемещения устройства в усложненных условиях колеса поджимают к внутренней стенке колонны с максимальным усилием, необходимым для обеспечения движения, при этом усилие и диаметр раскрытия на переднем по движению колесе оперативно делают минимально необходимым для обеспечения центрации устройства и прохождения первого колеса через сужение, при необходимости передние колеса, тормозящие движение, складывают полностью, по мере продвижения через сужение передние колеса опять сильно поджимают к стенке обсадной колонны, помогая прохождению сужения, а следующие по порядку колеса последовательно прискладывают на основании показаний датчиков усилий и диаметра и таким образом обеспечивают прохождение сужения колонны, а при реверсивном движении все осуществляют в обратном порядке.
2. Способ по п. 1, отличающийся тем, что при применении одной колесной секции центровку осуществляют с помощью управляемых центраторов, которые располагают выше и ниже колесной секции, а также оснащают датчиками диаметра раскрытия и электроприводами для управляемого складывания, в процессе прохождения сужений центраторы последовательно складывают и затем раскрывают, используя показания датчиков.
| Скважинный трактор для проведения работ в обсаженных скважинах | 2018 |
|
RU2707610C1 |
| СКВАЖИННЫЙ ТРАКТОР | 2011 |
|
RU2487230C2 |
| УСТРОЙСТВО ДЛЯ ДОСТАВКИ ПРИБОРОВ В ГОРИЗОНТАЛЬНУЮ СКВАЖИНУ | 2013 |
|
RU2515141C1 |
| УСТРОЙСТВО ДЛЯ ДОСТАВКИ ПРИБОРОВ В ГОРИЗОНТАЛЬНУЮ СКВАЖИНУ | 1998 |
|
RU2150569C1 |
| СПОСОБ СОЗДАНИЯ СИЛЫ ТЯГИ В СКВАЖИНЕ И СКВАЖИННЫЙ ТРАКТОР (ВАРИАНТЫ) | 2007 |
|
RU2354801C2 |
| Устройство для транспортирования приборов в скважине | 1982 |
|
SU1105627A1 |
| US 9720127 B2, 01.08.2017. | |||

