Изобретение относится к области геофизических исследований нефтяных и газовых скважин, в частности к средствам для доставки приборов в горизонтальные участки необсаженных наклонно направленных скважин.
Известно устройство для доставки приборов в горизонтальную скважину, содержащее цилиндрический корпус, расклинивающие опоры и движитель, выполненный в виде колес, установленных на валах расклинивающих опор через обгонные муфты, при этом в корпусе установлен электрический двигатель с редуктором с конической и цепной передачей (патент РФ № 2150569 по кл. Е21В 23/14 от 10.06.2000 г.)
Недостатком данного устройства является относительно низкая производительность устройства и надежность устройства при нарушениях геометрии скважины.
Наиболее близким техническим решением по совокупности существенных признаков является устройство для доставки приборов в горизонтальную скважину, содержащее цилиндрический корпус, узел перемещения, снабженный электродвигателем, шариковинтовой парой с тяговым элементом, узел фиксации, снабженный расклинивающими опорами с роликами и шарнирными рычагами, при этом узел перемещения снабжен движителем в виде колес, установленных в корпусе (патент РФ № 2236549 по кл. Е21В 23/14 от 20.11.2004 г.).
Наличие узла перемещения, содержащего движители колесного типа, обуславливает относительно низкое тяговое усилие при прохождении горизонтальных участков исследуемых скважин, недостаточную скорость
прохождения, значительные нагрузки на корпус устройства при передвижении в скважинах со значительными нарушениями геометрии, что снижает надежность устройства и безаварийность работ.
Задача, на решение которой направлено заявленное изобретение, заключается в повышении производительности работы устройства, снижении нагрузок при прохождении в скважинах со значительными нарушениями геометрии, повышение надежности и безаварийности работ.
Поставленная задача решается за счет того, что в устройстве для доставки приборов в горизонтальную скважину, содержащем полый цилиндрический корпус, узел его перемещения, снабженный электродвигателем, шариковинтовой парой и тяговым элементом, и узел фиксации, снабженный фиксирующими платформами и шарнирными рычагами, корпус выполнен в виде последовательно соединенных между собой звеньев с возможностью обеспечения жесткого соединения их между собой в направлении их осевого перемещения и взаимного вращения в двух ортогональных плоскостях и в направлении взаимного скручивания, в полости каждого звена расположен узел перемещения звена и узел фиксации звена, при этом узел перемещения каждого звена выполнен в виде расположенных с двух концов звена электродвигателей, выходные валы каждого из которых кинематически связаны с шариковинтовой парой, гайка которой жестко соединена стяговым элементом, выполненным в виде стержня, другой конец которого жестко соединен с местами крепления шарнирных рычагов узла фиксации.
На фиг. 1 изображен общий вид устройства для доставки приборов в горизонтальную скважину.
На фиг. 2 - узел перемещения звена.
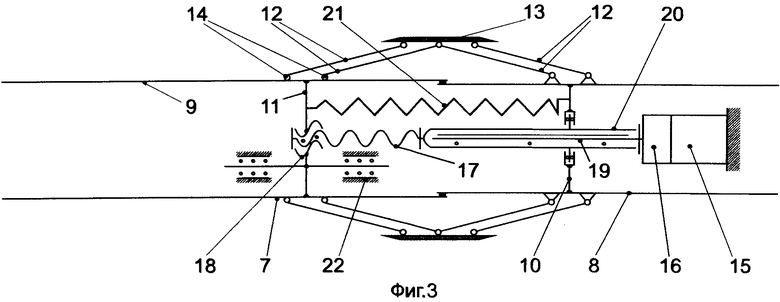
На фиг. 3 - узел фиксации звена.
На фиг. 4 - иллюстрация диаграммы движения устройства для доставки приборов в горизонтальную скважину.
Устройство для доставки приборов в горизонтальную скважину содержит корпус в виде однотипных звеньев I, II, III, IV, последовательно соединенных через соединительные пружинные вставки 1 (фиг. 1).
Вставка содержит три элемента вращения (фиг. 1, б) и обеспечивает жесткое соединение звеньев в направлении перемещения, но допускает их взаимное вращение в двух ортогональных плоскостях, совпадающих с продольной осью устройства, а также в направлении взаимного скручивания. К передней части головного звена (звено IV) крепится обтекатель 4, обеспечивающий снижение сопротивления в процессе перемещения, а к задней части последнего звена (звено I) крепится ввод 5, обеспечивающий подключение к каротажному кабелю 6 и коммутацию кабельных жил при переводе устройства из транспортного положения в рабочее и наоборот.
В полости каждого звена расположен узел перемещения звена (фиг. 2) и узел фиксации звена (фиг. 3).
Узел фиксации звена (фиг. 3) содержит две соосные втулки 7 и 8 с возможностью их перемещения в осевом направлении как относительно друг друга, так и относительно корпуса звена 3 (фиг. 1). Внутренние поверхности 9 соосных втулок 7 и 8 (на фиг. 3 показаны для втулки 7 ) соединены с передней поперечной стенкой 10 и задней поперечной стенкой 11, а на внешних поверхностях закреплены концы рычагов 12, другие концы которых закреплены на фиксирующих платформах 13 и при помощи шарниров 14. Система рычагов обеспечивает при взаимном перемещении втулок 7 и 8 удаление или приближение фиксирующих платформ относительно оси устройства, оставаясь параллельными ей.
Для взаимного перемещения втулок используется электродвигатель 15 с понижающим редуктором 16 и шариковинтовая пара, состоящая из винта 17 и гайки 18. Винт связан с передней поперечной стенкой 10, а гайка закреплена на задней поперечной стенке 11. Вращение от выходного вала редуктора к винту передается через подвижное вдоль оси телескопическое соединение внутреннего 19 и внешнего валов 20. Такое соединение обеспечивает передачу от внутреннего вала к внешнему валу только вращательное движение, допуская свободное взаимное перемещение валов в направлении оси. Это обеспечивает функционирование фиксирующего узла в любой допустимой точке его положения относительно корпуса звена 3 при неподвижно закрепленном электродвигателе 15.
Между передней 10 и задней 11 поперечными стенками расположена пружина 21, обеспечивающая возврат фиксирующих платформ 13 в исходное сложенное положение при отключении электродвигателя 15. Задняя поперечная стенка перемещается относительно корпуса вдоль линейных направляющих 22, исключающих взаимное вращение корпуса и узла фиксации.
Механизм перемещения (фиг. 2) состоит из двух идентичных по составу и принципу работы механизмов, расположенных в передней и задней части звена. Каждый из механизмов содержит тяговый электродвигатель 23 с редуктором 24, вращение от выходного вала которого передается винту 25 шариковинтовой пары (винт 25 и гайка 26). Гайка 26 жестко соединена с тяговыми стержнями 27, вторые концы стержней соединены с передней поперечной стенкой 10 узла фиксации, жестко соединенной с втулкой 8, на которой закреплены рычаги 12 (см. фиг. 3). При работе устройства тяговые элементы 27 перемещаются вдоль корпуса устройства по закрепленным на корпусе линейным направляющим 28; допускающим движение передней стенки относительно корпуса только в направлении его оси.
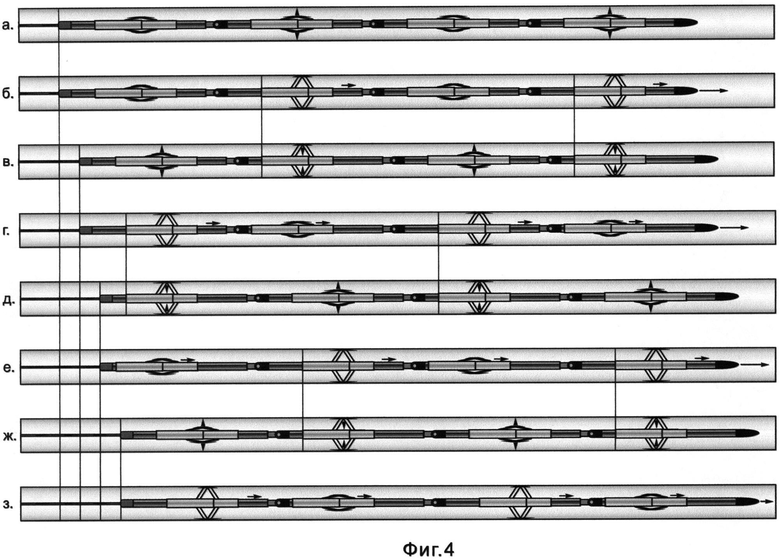
Работа устройства для доставки приборов в горизонтальную скважину иллюстрируется диаграммой на фиг. 4 (а - з).
Устройство доставляется к горизонтальному участку скважины в транспортном положении (фиг. 4, а), при этом фиксирующие платформы всех звеньев прижаты к корпусу. Управление устройством осуществляется от наземной аппаратуры оператором, либо в автоматическом режиме. Перед началом работы по сигналу от наземной аппаратуры кабельные жилы ввода 5 подключаются к электрическим цепям устройства, обеспечивая его готовность к работе.
На начальном этапе узлы фиксации двух звеньев (звенья II и IV) переводятся в разложенное состояние, их платформы фиксируются на стенках скважины. После этого начинается процесс рабочего перемещения устройства вдоль скважины.
На первом этапе рабочего движения (фиг. 2, б) фиксирующие узлы звеньев II и IV под действием механизмов перемещения движутся назад относительно корпуса, а т.к. платформы узлов зафиксированы на стенках скважины, то фактически имеет место движение корпуса вперед относительно стенок. Звенья I и III при этом пассивны. Так как все звенья жестко соединены между собой в продольном направлении, то относительно стенок скважины движется вперед все устройство, обеспечивая необходимое тянущее усилие для перемещения геофизических приборов и кабеля. По достижении фиксирующими узлами крайнего заднего положения относительно корпуса этот этап рабочего движения завершается.
Далее фиксирующие узлы звеньев I и III переводятся в разложенное состояние, а звенья II и IV складываются (фиг. 2, в).
На втором этапе рабочего движения (фиг. 2, г) фиксирующие узлы звеньев I и III перемещаются относительно корпуса назад, а звеньев II и IV вперед, в результате чего устройство доставки продолжает движение вперед относительно стенок скважины, а фиксирующие узлы звеньев II и IV перемещаются вперед, опережая общее движение устройства.
Второй этап рабочего движения завершается по достижении фиксирующими узлами звеньев I и III крайнего заднего, а звеньев II и IV крайнего переднего положения относительно корпуса своих звеньев. После этого фиксирующие узлы звеньев II и IV переводятся в разложенное состояние, а звеньев I и III складываются (фиг. 2, д).
Следующий этап (фиг. 2, е) аналогичен предыдущему с тем отличием, что на стенках скважины зафиксированы звенья II и IV, а вперед перемещаются фиксирующие узлы звеньев I и III.
Далее рабочий цикл повторяется (фиг. 2, ж, з идентичны фиг. 2, в, г).
В процессе перевода фиксирующих узлов звеньев из сложенного состояния в разложенное и наоборот в случае существенных нарушений геометрии скважины возможно смещение продольной оси отдельных звеньев относительно оси устройства, а также их поворот вдоль продольной оси. Использование пружинных соединительных вставок 1 позволяет избежать значительных изгибающих и скручивающих нагрузок на корпус звеньев в этом случае.
Выполнение корпуса устройства в виде последовательно соединенных между собой звеньев, в корпусе каждого из которых расположен узел
перемещения звена на основе поступательных кинематических пар и узел фиксации звена, позволяет повысить производительность работы устройства, снизить нагрузки при прохождении в скважинах со значительными нарушениями геометрии, повысить надежность при прохождении и доставке оборудования в заданные точки скважины.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ДОСТАВКИ ПРИБОРОВ В ГОРИЗОНТАЛЬНУЮ СКВАЖИНУ | 2012 |
|
RU2495222C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ РЫЧАЖНОГО УСТРОЙСТВА ДОСТАВКИ ПРИБОРОВ И ОБОРУДОВАНИЯ В ГОРИЗОНТАЛЬНЫЕ И СИЛЬНОНАКЛОННЫЕ УЧАСТКИ ОБСАЖЕННЫХ И НЕОБСАЖЕННЫХ СКВАЖИН | 2020 |
|
RU2739781C1 |
| РЫЧАЖНОЕ УСТРОЙСТВО ДЛЯ ДОСТАВКИ ПРИБОРОВ И ОБОРУДОВАНИЯ В ГОРИЗОНТАЛЬНЫЕ СКВАЖИНЫ И ЕГО УЗЕЛ ФИКСАЦИИ | 2020 |
|
RU2742922C1 |
| ЭНДОСКОП ДЛЯ ПРОДВИЖЕНИЯ ВНУТРИ ПОЛОСТЕЙ ОРГАНИЗМА | 2015 |
|
RU2595058C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2004 |
|
RU2274767C1 |
| МОБИЛЬНАЯ АНТЕННАЯ УСТАНОВКА | 2012 |
|
RU2482578C1 |
| ПРИВОД ЦЕПНОЙ ДЛЯ СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2014 |
|
RU2544915C1 |
| Устройство для прессования табака в многослойные кипы | 1959 |
|
SU130382A1 |
| МЕХАНУРГИЧЕСКИЙ СТОЛ ДЛЯ МАССАЖА И МАНУАЛЬНОЙ ТЕРАПИИ | 2009 |
|
RU2391084C1 |
| СПОСОБ ИССЛЕДОВАНИЯ НАКЛОННО-НАПРАВЛЕННЫХ И ГОРИЗОНТАЛЬНЫХ СКВАЖИН ПРИ НАСОСНОЙ ЭКСПЛУАТАЦИИ | 2023 |
|
RU2810764C1 |

Изобретение относится к средствам для доставки приборов в горизонтальные участки необсаженных наклонно-направленных скважин. Устройство содержит полый цилиндрический корпус, узел его перемещения, снабженный электродвигателем, шариковинтовой парой и тяговым элементом и узел фиксации, снабженный фиксирующими платформами и шарнирными рычагами. При этом корпус выполнен в виде последовательно соединенных между собой звеньев с возможностью обеспечения жесткого соединения их между собой в направлении их осевого перемещения и взаимного вращения в двух ортогональных плоскостях и в направлении взаимного скручивания. В полости каждого звена расположен узел перемещения звена и узел фиксации звена. При этом узел перемещения каждого звена выполнен в виде расположенных с двух концов звена электродвигателей, выходные валы каждого из которых кинематически связаны с шариковинтовой парой, гайка которой жестко соединена с тяговым элементом, выполненным в виде стержня, другой конец которого жестко соединен с местами крепления шарнирных рычагов узла фиксации. Технический результат заключается в повышении производительности работы устройства, снижении нагрузок при прохождении в скважинах со значительными нарушениями геометрии, повышении надежности и безаварийности работ. 4 ил.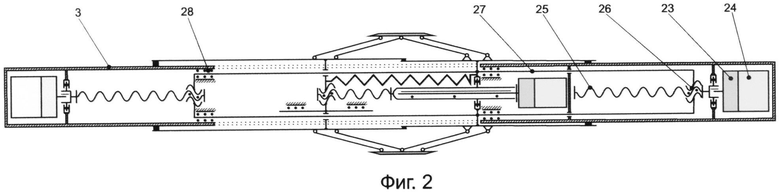
Устройство для доставки приборов в горизонтальную скважину, содержащее полый цилиндрический корпус, узел его перемещения, снабженный электродвигателем, шариковинтовой парой и тяговым элементом, и узел фиксации, снабженный фиксирующими платформами и шарнирными рычагами, отличающееся тем, что корпус выполнен в виде последовательно соединенных между собой звеньев с возможностью обеспечения жесткого соединения их между собой в направлении их осевого перемещения и взаимного вращения в двух ортогональных плоскостях и в направлении взаимного скручивания, в полости каждого звена расположен узел перемещения звена и узел фиксации звена, при этом узел перемещения каждого звена выполнен в виде расположенных с двух концов звена электродвигателей, выходные валы каждого из которых кинематически связаны с шариковинтовой парой, гайка которой жестко соединена с тяговым элементом, выполненным в виде стержня, другой конец которого жестко соединен с местами крепления шарнирных рычагов узла фиксации.
| УСТРОЙСТВО ДЛЯ ДОСТАВКИ ПРИБОРОВ В ГОРИЗОНТАЛЬНУЮ СКВАЖИНУ | 2002 |
|
RU2236549C2 |
| УСТРОЙСТВО ДЛЯ ДОСТАВКИ ПРИБОРОВ В ГОРИЗОНТАЛЬНУЮ СКВАЖИНУ | 1998 |
|
RU2150569C1 |
| УСТРОЙСТВО ДЛЯ ДОСТАВКИ ПРИБОРОВ В ГОРИЗОНТАЛЬНУЮ СКВАЖИНУ | 2000 |
|
RU2175374C1 |
| УСТРОЙСТВО ДЛЯ ДОСТАВКИ ПРИБОРОВ В ГОРИЗОНТАЛЬНУЮ СКВАЖИНУ | 2005 |
|
RU2345210C2 |
| УСТРОЙСТВО ДЛЯ ДОСТАВКИ ПРИБОРОВ В ГОРИЗОНТАЛЬНУЮ СКВАЖИНУ | 2008 |
|
RU2400621C2 |
| US 2003024710 A1, 06.02.2003 | |||

