Изобретение относится к нефтегазодобывающей промышленности и может быть применено для доставки приборов и оборудования в горизонтальные и сильнонаклонные участки обсаженных и не обсаженных скважин в условиях осложненной геометрии внутреннего сечения и необходимости проведения каротажных работ, требующих обеспечения равномерного, без рывков и остановок движения пассажирских геофизических приборов с помощью рычажного устройства.
Известно рычажное устройство для доставки приборов в горизонтальную скважину (патент РФ № 2175374, МПК Е21В 23/14, публ. 27.10.2001), с помощью которого реализован простейший способ доставки геофизических приборов и оборудования в горизонтальные скважины, содержащее цилиндрический корпус, шарнирно установленные расклинивающие опоры, направляющие штоки и движитель, выполненный в виде четырех втулок, попарно соединенных расклинивающими опорами, причем в каждой паре подвижная втулка имеет ходовую гайку и установлена с возможностью перемещения, а другая втулка неподвижно закреплена на соответствующих направляющих в штоках, установленных в соответствующих корпусах, в каждом из которых установлен электродвигатель с понижающим редуктором, ходовым винтом с шагом, исключающим его самоторможение. При работе предлагаемое устройство соединяют со спускаемым прибором и каротажным кабелем соединяют с наземным пультом с помощью которого управляют работой. Передвижение устройства осуществляют попеременным включением двигателей и сменой направлений их вращения.
Недостаток способа передвижения заключается в низкой производительности, так как в процессе движения неизбежны постоянные остановки по завершению циклов движения, повышенная аварийность и низкая надежность вследствие невозможности прогнозирования предстоящих осложнений движению. Невозможность осуществления равномерного движения для проведения каротажных работ.
Известен способ доставки, реализованный с помощью устройства (патент РФ № 27207610, МПК Е21В 23/14, публ. 28.11.2019), состоящего из двух колесных секций с электродвигателями для движения и прижима колес, верхнего и нижнего центраторов, блока электронного со встроенной телеметрической системой связи с наземной каротажной системой, приводящая в движение колеса устройства соответствующими командами, при этом регистрируют показания в блоке электроники датчиков температуры, акселерометров и натяжения кабеля.
Этот способ не позволяет воспользоваться попеременной работой двух тяговых звеньев, поскольку устройство принципиально отличается по конструкции движителя, и не имеет дискретных шагов перемещения.
Ближайшим аналогом заявленному способу является способ доставки приборов в горизонтальную скважину, реализованный с помощью устройства для доставки приборов в горизонтальную скважину (патент РФ № 2515141, МПК Е21В 23/14, публ. 10.05.2014), содержащее не менее двух звеньев, каждое из которых содержит полый цилиндрический корпус, узел его перемещения, снабженный электродвигателем, шариковинтовой парой и тяговым элементом, узел фиксации, снабженный фиксирующими платформами и шарнирными рычагами. Корпуса звеньев связаны с возможностью обеспечения жесткого соединения их между собой в направлении их осевого перемещения и взаимного вращения в двух ортогональных плоскостях и в направлении взаимного скручивания. В полости каждого звена расположен узел перемещения звена и узел фиксации звена, при этом узлы перемещения выполнены в виде расположенных с двух концов звена электродвигателей, выходные валы каждого из которых кинематически связаны с шариковинтовой парой, гайка которой жестко соединена с тяговым элементом, выполненным в виде стержня, другой конец которого жестко соединен с местами крепления шарнирных рычагов узла фиксации.
Устройство доставляют к горизонтальному участку скважины в транспортном положении со сложенными узлами фиксации всех звеньев. Управление устройством осуществляют от наземной аппаратуры через каротажный кабель, соединенный с устройством для обеспечения его доставки к горизонтальному интервалу. В дальнейшем, устройство передвигают, поочередно поджимая и передвигая с помощью электродвигателей узлов фиксации, обеспечивая необходимое тянущее усилие для перемещения пассажирских геофизических приборов и кабеля.
Недостатками данного способа являются: невозможность равномерного движения для обеспечения качественного каротажа, повышенные динамические нагрузки на элементы приводов, повышенная аварийность движения в осложненных участках горизонтальных скважин в связи с отсутствием специальных датчиков для прогнозирования ситуаций в процессе движения и в связи с этим, невозможность автоматизации процесса движения. Низкая скорость движения, за счет вынужденных остановок в циклах движения.
Задача, на решение которой направлено изобретение, заключается в повышении надежности, долговечности и эксплуатационной безопасности устройства, а также в расширении технологических возможностей использования.
Технический результат – равномерное безостановочное движение рычажного устройства доставки приборов и оборудования в горизонтальные и сильнонаклонные участки обсаженных и необсаженных скважин с обеспечением безаварийного прохождения скважины и увеличения скорости движения.
Указанный технический результат достигается тем, что способ управления движением рычажного устройства доставки приборов и оборудования в горизонтальные и сильнонаклонные участки обсаженных и необсаженных скважин, осуществляемый посредством рычажного устройства доставки, состоящего из электронного блока, а также нижнего и верхнего тяговых звеньев, включающих корпус, узлы фиксации и перемещения, снабженные электродвигателями, обеспечивающими их фиксацию и перемещение корпуса, которые с помощью встроенной телеметрической системы связи с наземной каротажной системой приводят в движение соответствующими командами, поочередно фиксируя узлы тяговых звеньев и передвигая корпус узлами перемещения, осуществляют шаговое движение, при этом в электронном блоке регистрируют показания датчиков температуры, акселерометров и натяжения кабеля, согласно изобретению, для обеспечения плавного безостановочного движения устройства доставки узлы фиксации и перемещения тяговых звеньев оснащают исполнительными электронными узлами, а привода с электродвигателями, обеспечивающими прижим и движение, оснащают датчиками положения ротора электродвигателей, датчиками усилия прижатия или тока питания электродвигателей, с помощью которых обеспечивают контроль за интервалами передвижения узлов перемещения и узлов фиксации звеньев, а также возникающими усилиями при их перемещении, по крайней мере, двумя центраторами, при этом нижний центратор оснащают датчиками: контроля перемещения, диаметра раскрытия и исполнительным электронным узлом, с помощью которых анализируют предстоящие осложнения движению, выявляют и исключают случаи проскальзывания узлов фиксации при недостаточном их поджатии к стенке скважины, при этом контроль движения осуществляют с помощью контроллера, установленного в электронный блок через высокоскоростную телеметрию, связывающую контроллер с исполнительными электронными узлами фиксации и перемещения тяговых звеньев, обеспечивающую управление в реальном времени и с помощью специальной программы, установленной в контроллере электронного блока, по команде с бортовой ЭВМ наземного регистрирующего комплекса, обеспечивают движение устройства следующим образом: сначала запускают тестовый режим, при котором измеряют параметры движения каждого узла, при этом совершают один цикл движения, на основе этих измерений, формируют контрольные интервалы начала и конца движения, которые должны составлять несколько процентов от диапазонов перемещений узлов, измеряемых в количестве оборотов двигателей, а начало и конец движения определяют по увеличению тока потребления двигателей, затем элементы тяговых звеньев устанавливают в исходные для движения положения, узлы фиксации при этом, в зависимости от осложняющих ситуаций, полностью складывают или открывают на допустимую программой величину внутреннего диаметра скважины, в тяговых звеньях устанавливают узлы фиксации в крайнее нижнее положение по оси устройства, далее по команде из контроллера электронного блока в исполнительный электронный узел узла фиксации, узел фиксации нижнего тягового звена поджимают к стенке скважины и его узлом перемещения в это время начинают перемещать корпус, при этом двигают устройство вперед, верхнее тяговое звено в это время находится в режиме ожидания, до тех пор, пока в нижнем звене узел фиксации не дойдет до конечного контрольного интервала и при вхождении узла фиксации нижнего звена в контрольный интервал, по сигналу из контроллера электронного блока поджимают узел фиксации верхнего звена и одновременно с прижимом, двигают вперед верхнее звено, после контроля усилия прижатия узла фиксации верхнего звена, командой из контроллера электронного блока разрешают отжим и движение на возврат узла фиксации нижнего звена, который во время движения узла фиксации верхнего звена возвращают в исходное положение, этот цикл повторяют до конца намеченного интервала движения, при этом, в случае необходимости реверсивное движение осуществляют в обратном порядке.
При этом согласно изобретению, для улучшения качества равномерного движения устройства, контроллеры приводных двигателей оснащают программой авторегулирования, которая обеспечит устройство возможностью плавного движения на заданной скорости.
Настоящим изобретением реализуется безостановочное движение рычажного устройства в обсаженных и не обсаженных скважинах при максимально приближенной к равномерной скорости, что снижает динамические нагрузки на силовые элементы устройства и уменьшает аварийность, повышает качество каротажа. В устройстве применены датчики и электронные узлы для обеспечения контроля состояний и оперативного реагирования устройства на изменения мешающих движению факторов.
Для реализации заявленного способа рычажное устройство оснащают датчиками положения ротора электродвигателей, датчиками измерения усилия прижатия или тока питания электродвигателей для обеспечения контроля состояний и прогнозирования реакции устройства на изменения мешающих движению факторов. При этом тяговые звенья оснащают электронными узлами с контроллерами для управления электродвигателями, обработки показаний датчиков и высокоскоростной телеметрией для связи с контроллером электронного блока. Также с целью обеспечения возможности оперативного реагирования (для выявления случаев проскальзывания узлов фиксации в случае недостаточного их поджатия при расклинивании) и автоматизации процесса перемещения на переднем центраторе установлены датчики измерения диаметра скважины и колесный датчик контроля перемещения устройства. Упомянутые датчики выполнены с возможностью передачи сигнала на электронный блок.
Контролер электронного блока содержит программы, основанные на алгоритмах управления движением электродвигателей тяговых звеньев, на основе, полученных с помощью высокоскоростной телеметрической системы, данных, а также обменом информации с помощью низкоскоростной телеметрической системы связи через геофизический кабель с бортовой ЭВМ наземной каротажной системой. Для контроля нагрузки на рычажное устройство оно оснащено датчиком натяжения кабеля.
Таким образом обеспечивается безостановочное движение устройства, уменьшается аварийность. Равномерное безостановочное движение устройства с пассажирским каротажным прибором обеспечивает качественный материал каротажа. Кроме того, исключение остановок в циклах движения позволяет увеличить скорость движения устройства.
Изобретение поясняется описанием конкретного примера выполнения и прилагаемыми графическими материалами, где на:
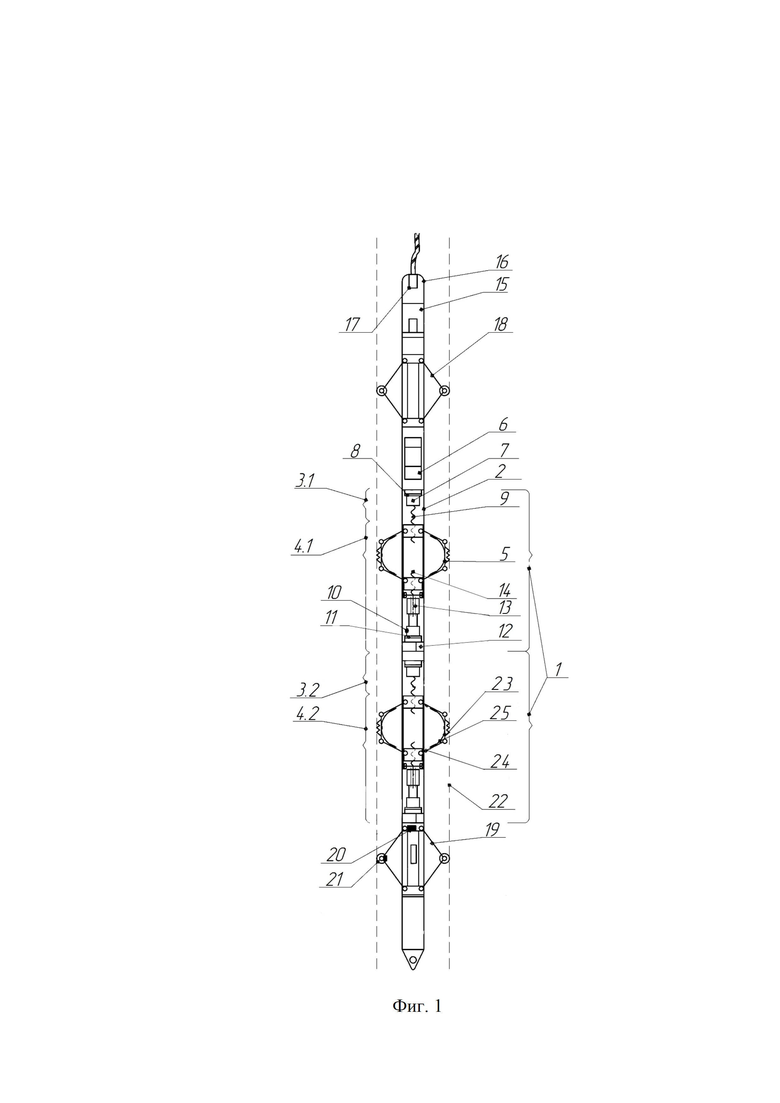
фиг. 1 схематично представлено рычажное устройство, при управлении движением которого внутри скважины реализован предлагаемый способ;
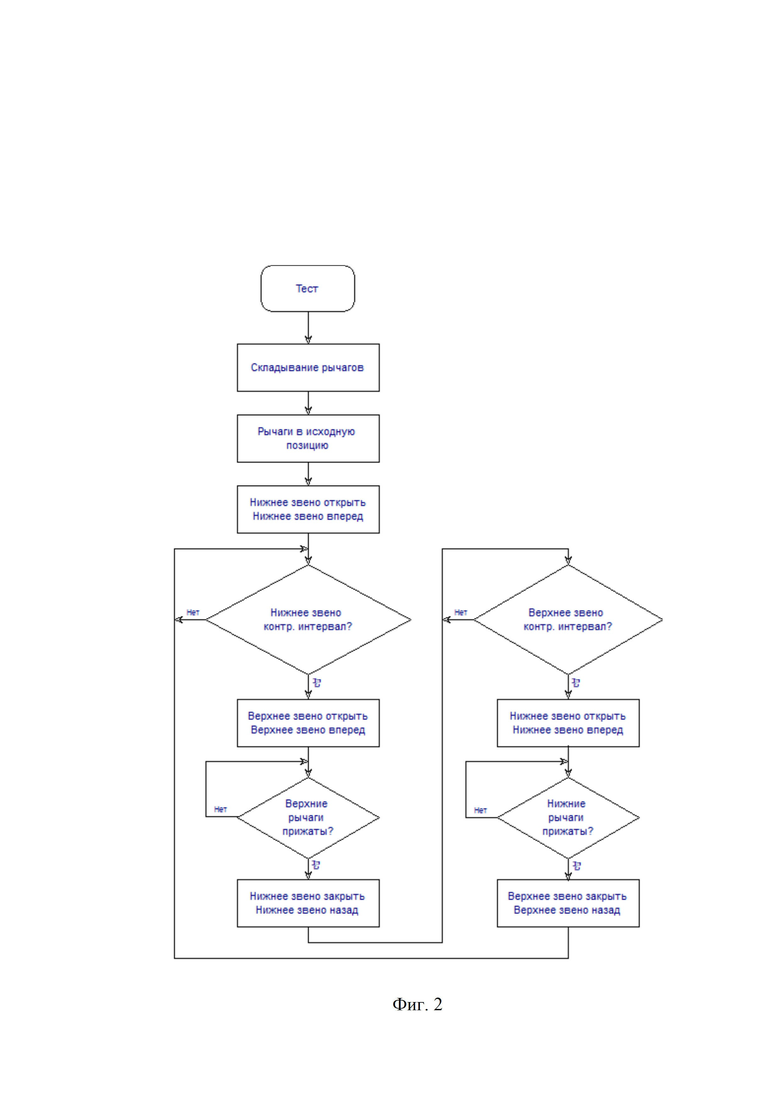
фиг. 2 представлена блок-схема, иллюстрирующая алгоритм управления движения рычажного устройства внутри скважины.
Для реализации заявленного способа рычажное устройство оснащают, по крайней мере, двумя жестко соединенными тяговыми звеньями 1, каждое из которых содержит цилиндрический корпус 2, узел перемещения 3.1 (для верхнего звена), 3.2 (для нижнего звена) и узел фиксации 4.1 (для верхнего звена), 4.2 (для нижнего звена) с рычажной системой 5, содержащей подвижные рычаги, а также электронный блок 6 управления, с помощью которого регистрируют показания датчиков температуры, акселерометров и натяжения кабеля (фиг. 1).
Каждый узел перемещения 3.1, 3.2 содержит электропривод, включающий силовой электродвигатель 7, на валу которого размещен с датчик положения (энкодер) 8 узла фиксации 4.1, 4.2, редуктор и винтовая пара 9, которые связаны с рычажной системой 5 каждого фиксирующего узла 4.1, 4.2, с обеспечением возможности его перемещения. Кроме того, каждый узел перемещения 3.1, 3.2 содержит электронный узел, включающий контроллер с модемом высокоскоростной телеметрии для приема команд от электронного блока 6 и обработки данных датчика положения 8 ротора электродвигателя 7 для их последующей передачи на электронный блок 6, датчика температуры для контроля перегрева электродвигателя, датчика тока потребления электродвигателя для исключения аварийного режима, а также силовой драйвер для управления режимами работы электродвигателя.
Каждый узел фиксации 4.1, 4.2 содержит электропривод, включающий силовой электродвигатель 10 с датчиком положения (энкодером) 11 ротора электродвигателя 10 и датчиком измерения усилия прижатия или тока питания 12 электродвигателя 10, редуктор, телескопическое соединение 13, выполненное с возможностью обеспечения свободы перемещения каждого узла фиксации 4.1, 4.2 относительно корпуса 2 тягового звена 1 при вращении винтовой пары 14 электродвигателем 10. Свободное перемещение каждого узла фиксации 4.1, 4.2 относительно корпуса 2 обеспечивает поджатие и складывание рычажной системы 5. Дополнительно узел фиксации 4.1, 4.2 содержит электронный узел, включающий контроллер с модемом высокоскоростной телеметрии для приема, обработки данных датчиков 11 и 12 и последующей передачи контроллеру электронного блока 6, силовой драйвер для управления режимами работы электродвигателя.
Электронный блок 6 включает в себя контроллер и телеметрические модемы системы связи низкоскоростной 21кБод для связи через кабель с бортовой ЭВМ наземной каротажной системы и высокоскоростной 1,2МБод для управления в реальном времени двигателями тяговых звеньев 1 и считываний в реальном времени показаний датчиков 8, 11, 12.
Таким образом контроллер электронного блока 6 содержит программы, основанные на алгоритмах управления в реальном времени двигателями тяговых звеньев 1 и рычажных систем 5, на основе полученных от датчиков 8, 11, 12 сигналов и регистрации показаний всех имеющихся датчиков.
Кроме того, устройство оснащено датчиком натяжения кабеля 15 для контроля нагрузки на устройство. Датчик натяжения кабеля 15 представляет собой устройство с упругим элементом, снабженным датчиком Холла или тензометрическим датчиком, который служит для измерения величины его деформации пропорциональной силе натяжения кабеля. При этом кабельная головка 16 устройства оснащена легкоплавким фиксатором 17, который в аварийной ситуации расплавляется при подаче на него, например, тока обратной полярности питающему по одной из жил кабеля из наземного источника, и освобождает кабель от устройства. Освобождение кабеля от устройства позволит без осложнений одеть на устройство воронку ловильной системы.
Для контроля за возникающими в процессе движения усилиями устройство оснащено, по крайней мере, двумя центраторами 18, 19 для уменьшения нагрузки на устройство сил трения при прохождении в скважине. При этом, передний центратор 19 снабжен поворотными датчиками Холла для измерения диаметра 20 скважины 22 и размещенным на одном из колес центратора 19 датчиком контроля перемещения 21, для выявления случаев проскальзывания узлов фиксации 4.1, 4.2 в случае недостаточного их поджатия при расклинивании. При этом колесо переднего центратора 19, на котором размещается датчик контроля перемещения 21, дополнительно подпружинивается, и его поверхность качения выполняется рифленой для лучшего сцепления со стенкой скважины 22.
Способ управления движением рычажного устройства внутри скважины проиллюстрирован представленной блок-схемой (фиг. 2).
На дневной поверхности находится силовой высоковольтный источник питания устройства, наземная регистрирующая система с бортовым компьютером для обеспечения связи и управления устройством и каротажная лебедка с геофизическим кабелем.
После того как устройство присоединено с пассажирским геофизическим прибором и геофизическим кабелем, запускают тестовый режим, при котором измеряют параметры движения каждого узла, при этом совершается один цикл движения. На основе этих измерений формируются контрольные интервалы начала и конца движения, которые должны составлять около 20 % от диапазонов перемещения узлов. Указанное значение, определенное опытным путем в процессе испытаний, является примером осуществления изобретения и не ограничивает его осуществление. Контрольные интервалы измеряются количеством оборотов электродвигателей 7 и 10. Начало и конец движения определяется по увеличению тока потребления электродвигателей 7 и 10.
Затем элементы тяговых звеньев 1 устанавливают в исходные для движения положения через наземную регистрирующую систему. Узлы фиксации 4.1, 4.2 устанавливаются в исходные для движения положения при этом, в зависимости от осложняющих ситуаций, полностью сложены или открыты на допустимую программой величину внутреннего диаметра скважины 22. В тяговых звеньях 1 устанавливают узлы фиксации 4.1 и 4.2 в крайнее нижнее положение по оси устройства (фиг. 1, 2).
С помощью каротажной лебедки, производится опускание устройства в скважину. Как правило, до осложнений движению, обычно - до вхождения в горизонтальный или сильнонаклонный участок скважины, который начинается с переходом на эксплуатационную колонну другого диаметра.
При вхождении в сильнонаклонной или горизонтальной части скважины по команде с бортовой ЭВМ наземного регистрирующего комплекса, движение устройства обеспечивается следующим образом:
по команде из контроллера электронного блока 6, фиксирующий узел 4.2 нижнего тягового звена 1 поджимают к стенке скважины 22 и его узлом перемещения 3.2 начинают перемещать корпус 2, при этом устройство двигают вперед. Электродвигатели 7 и 10 верхнего тягового звена 3.1 в это время пребывают в режиме ожидания, до тех пор, пока в нижнем звене 1 узел фиксации 4.2 не дойдет до конечного контрольного интервала;
при вхождении узла фиксации 4.2 в контрольный интервал, с помощью контроллера электронного блока 6 подают одновременно сигнал на прижим и перемещение вперед верхнего узла фиксации 4.1;
после контроля усилия прижатия узла фиксации 4.1 верхнего звена 1 с помощью датчика тока питания 12 двигателя 10, командой из контроллера электронного блока 6 разрешают отжим и движение на возврат узла фиксации 4.2 нижнего звена 1, который во время движения узла 4.1 верхнего звена 1 возвращают в исходное положение.
С целью обеспечения равномерного движения устройства, контроллеры приводимых электродвигателей 7 и 10 каждого звена 1 оснащены программой авторегулирования, которая обеспечивает плавное равномерное движение на заданной скорости.
Контроллер электронного блока 6 обеспечивает цикличность до конца интервала движения. В процессе движения анализируются показания датчиков 8, 11, 12, датчиков 20, 21 переднего центратора 19, датчика натяжения кабеля 15 и автоматически подбираются оптимальные параметры движения и прижатия. В случае необходимости реверсивное движение устройства осуществляют путем повторения цикла в обратном порядке. При этом контроль движения осуществляется с помощью исполнительных электронных узлов фиксации и перемещения тяговых звеньев 1, а также с помощью датчиков ускорения (акселерометров), локатора муфт, а также датчика натяжения 15 кабеля и глубиномера на каротажной лебедке в электронном блоке 6, датчика контроля перемещения 21 и датчика измерения диаметра 20 скважины 22 на переднем центраторе 19.
Режим безостановочного равномерного движения необходим для обеспечения качественного каротажа, например, термометрии, которая проводится обязательно при движении по горизонтальному участку вперед, с помощью устройства доставки, пока скважинная жидкость еще не перемешана прохождением аппаратуры.
В настоящее время завершена разработка рычажного устройства для доставки приборов и оборудования в горизонтальные скважины, диаметром Ø54 мм, длиной около 9 метров, оснащенного всеми описанными узлами и датчиками. Проведены стендовые испытания, где подтверждены все заложенные характеристики, тяговое усилие до 400 кг, скорость движения до 400 метров в час. Планируются скважинные испытания на одном из месторождений.
Таким образом, по сравнению с известными аналогами, конструкция устройства обладает возможностью безостановочного передвижения в осложненных участках скважины, не обсаженных скважинах, что снижает динамические нагрузки на элементы устройства и аварийность, увеличивает скорость, а возможность равномерного, без рывков движения обеспечивает качественный каротаж.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЫЧАЖНОЕ УСТРОЙСТВО ДЛЯ ДОСТАВКИ ПРИБОРОВ И ОБОРУДОВАНИЯ В ГОРИЗОНТАЛЬНЫЕ СКВАЖИНЫ И ЕГО УЗЕЛ ФИКСАЦИИ | 2020 |
|
RU2742922C1 |
| УСТРОЙСТВО ДЛЯ ДОСТАВКИ ПРИБОРОВ И ОБОРУДОВАНИЯ В ОБСАЖЕННЫЕ СКВАЖИНЫ | 2020 |
|
RU2745495C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОЛЕСНОГО УСТРОЙСТВА ДОСТАВКИ ПРИБОРОВ И ОБОРУДОВАНИЯ В ГОРИЗОНТАЛЬНЫЕ УЧАСТКИ ОБСАЖЕННЫХ СКВАЖИН | 2020 |
|
RU2745496C1 |
| Скважинный трактор для проведения работ в обсаженных скважинах | 2018 |
|
RU2707610C1 |
| СПОСОБ ИССЛЕДОВАНИЯ НАКЛОННО-НАПРАВЛЕННЫХ И ГОРИЗОНТАЛЬНЫХ СКВАЖИН ПРИ НАСОСНОЙ ЭКСПЛУАТАЦИИ | 2023 |
|
RU2810764C1 |
| УСТРОЙСТВО ДЛЯ КАРОТАЖА СКВАЖИН, ОБСАЖЕННЫХ МЕТАЛЛИЧЕСКОЙ КОЛОННОЙ | 2011 |
|
RU2488852C1 |
| Устройство для каротажа скважин, обсаженных металлической колонной | 2011 |
|
RU2630991C1 |
| Устройство для электрического каротажа через металлическую колонну | 2011 |
|
RU2631099C2 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРИЧЕСКОГО КАРОТАЖА ЧЕРЕЗ МЕТАЛЛИЧЕСКУЮ КОЛОННУ | 2011 |
|
RU2508561C2 |
| Способ газогидравлического воздействия на пласт и устройство для его осуществления | 2019 |
|
RU2715587C1 |
Изобретение относится к нефтегазодобывающей промышленности. Заявлен способ управления движением рычажного устройства доставки приборов и оборудования в горизонтальные и сильнонаклонные участки обсаженных и необсаженных скважин. Технический результат заключается в равномерном безостановочном движении рычажного устройства доставки приборов и оборудования в горизонтальные и сильнонаклонные участки обсаженных и необсаженных скважин с обеспечением безаварийного прохождения скважины и увеличения скорости движения. Для достижения заявленного технического результата тяговые звенья устройства оснащают датчиками и электронными узлами для обеспечения контроля состояний и оперативного реагирования устройства на изменение мешающих движению факторов. Также оснащают телеметрическими системами: низкоскоростной для связи через геофизический кабель с бортовой ЭВМ наземной каротажной системы, высокоскоростной для управления в реальном времени двигателями тяговых звеньев и считывания показаний датчиков. Движение тяговых звеньев и прижатие узла фиксации осуществляют попеременным включением электродвигателей по команде контроллера электронного блока. При этом с помощью контроллера электронного блока осуществляют контроль прижатия тяговых звеньев с помощью датчиков и контроль движения, определяемый контрольными интервалами начала и конца движения, измеряемыми числом оборотов электродвигателей. 1 з.п. ф-лы, 2 ил.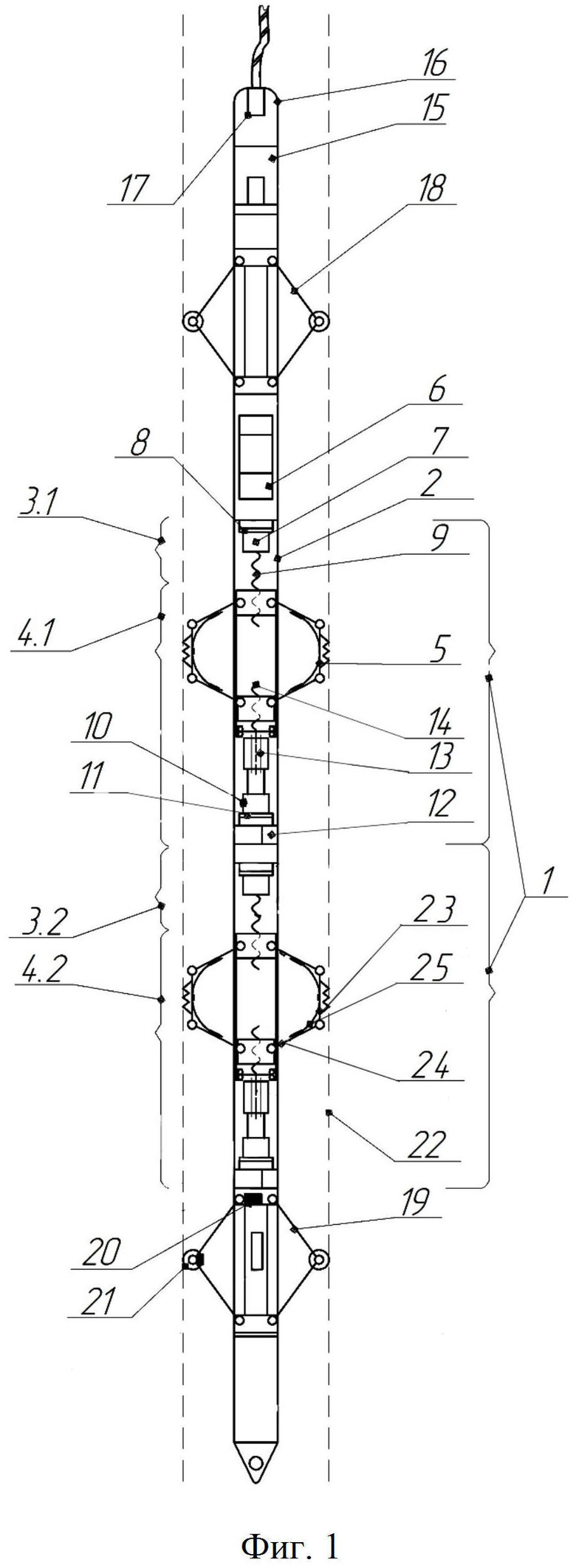
1. Способ управления движением рычажного устройства доставки приборов и оборудования в горизонтальные и сильнонаклонные участки обсаженных и необсаженных скважин, характеризующийся тем, что осуществляется посредством рычажного устройства доставки, состоящего из электронного блока, а также нижнего и верхнего тяговых звеньев, включающих корпус, узлы фиксации и перемещения, снабженные электродвигателями, обеспечивающими их фиксацию и перемещение корпуса, с помощью соответствующих команд встроенной телеметрической системы связи с наземной каротажной системой производят движение, поочередно фиксируя узлы тяговых звеньев и передвигая корпус узлами перемещения, осуществляют шаговое движение, при этом в электронном блоке регистрируют показания датчиков температуры, акселерометров и натяжения кабеля, отличающийся тем, что для обеспечения плавного безостановочного движения устройства доставки узлы фиксации и перемещения тяговых звеньев оснащают исполнительными электронными узлами, а привода с электродвигателями, обеспечивающими прижим и движение, оснащают датчиками положения ротора электродвигателей, датчиками усилия прижатия или тока питания электродвигателей, с помощью которых обеспечивают контроль за интервалами передвижения узлов перемещения и узлов фиксации звеньев, а также возникающими усилиями при их перемещении, по крайней мере, двумя центраторами, при этом нижний центратор оснащают датчиками: контроля перемещения, датчиками диаметра раскрытия и исполнительным электронным узлом, с помощью которых анализируют предстоящие осложнения движению, выявляют и исключают случаи проскальзывания узлов фиксации при недостаточном их поджатии к стенке скважины, при этом контроль движения осуществляют с помощью контроллера, установленного в электронный блок через высокоскоростную телеметрию, связывающую контроллер с исполнительными электронными узлами фиксации и перемещения тяговых звеньев, обеспечивающую управление в реальном времени, и с помощью специальной программы, установленной в контроллере электронного блока, по команде с бортовой ЭВМ наземного регистрирующего комплекса обеспечивают движение устройства следующим образом: сначала запускают тестовый режим, при котором измеряют параметры движения каждого узла, при этом совершают один цикл движения, на основе этих измерений, формируют контрольные интервалы начала и конца движения, которые должны составлять несколько процентов от диапазонов перемещений узлов, измеряемых в количестве оборотов двигателей, а начало и конец движения определяют по увеличению тока потребления двигателей, затем элементы тяговых звеньев устанавливают в исходные для движения положения, узлы фиксации при этом, в зависимости от осложняющих ситуаций, полностью складывают или открывают на допустимую программой величину внутреннего диаметра скважины, в тяговых звеньях устанавливают узлы фиксации в крайнее нижнее положение по оси устройства, далее по команде из контроллера электронного блока в исполнительный электронный узел узла фиксации, узел фиксации нижнего тягового звена поджимают к стенке скважины и его узлом перемещения в это время начинают перемещать корпус, при этом двигают устройство вперед, верхнее тяговое звено в это время находится в режиме ожидания, до тех пор, пока в нижнем звене узел фиксации не дойдет до конечного контрольного интервала, и при вхождении узла фиксации нижнего звена в контрольный интервал по сигналу из контроллера электронного блока поджимают узел фиксации верхнего звена, и одновременно с прижимом двигают вперед верхнее звено, после контроля усилия прижатия узла фиксации верхнего звена командой из контроллера электронного блока разрешают отжим и движение на возврат узла фиксации нижнего звена, который во время движения узла фиксации верхнего звена возвращают в исходное положение, этот цикл повторяют до конца намеченного интервала движения, при этом в случае необходимости реверсивное движение осуществляют в обратном порядке.
2. Способ управления движением рычажного устройства по п. 1, отличающийся тем, что для улучшения качества равномерного движения устройства контроллеры приводных двигателей оснащают программой авторегулирования, которая обеспечит устройство возможностью плавного движения на заданной скорости.
| УСТРОЙСТВО ДЛЯ ДОСТАВКИ ПРИБОРОВ В ГОРИЗОНТАЛЬНУЮ СКВАЖИНУ | 2013 |
|
RU2515141C1 |
| RU 26033220 C1, 27.11.2016 | |||
| СКВАЖИННЫЙ КОНТРОЛЬНО-ИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС И СПОСОБ ЕГО МОНТАЖА В ГОРИЗОНТАЛЬНОЙ СКВАЖИНЕ | 2012 |
|
RU2487238C1 |
| КАРОТАЖНОЕ УСТРОЙСТВО, ПРЕДНАЗНАЧЕННОЕ ДЛЯ КАРОТАЖА СКВАЖИНЫ (ВАРИАНТЫ) | 2010 |
|
RU2460881C2 |
| US 5947213 A, 07.09.1999 | |||
| WO 2014188203 A1, 27.11.2014. | |||

