ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к системе, способу и компьютерной программе для для поддержки выполнения интервенционной процедуры, подобной процедуре брахитерапии.
УРОВЕНЬ ТЕХНИКИ
WO 2009/156893 A1 раскрывает брахитерапевтическую систему для целевой области, содержащую аппликатор, содержащий множество каналов, которые являются полыми и расширяющимися, при этом аппликатор выполнен с возможностью имплантации в целевую область. Система дополнительно содержит следящее устройство, генератор сигналов слежения для генерации сигнала, принимаемого следящим устройством, и процессор. Следящее устройство имеет размер и форму, допускающие продвижение и отведение на протяжении по меньшей мере участка множествам каналов. Процессор определяет положение одного или более из множества каналов по перемещению следящего устройства, при этом процессор определяет местоположение одного или более из множества каналов в изображении по по меньшей мере частично, результату измерения положения из следящего устройства.
US 2007/0078327 A1 раскрывает систему для осуществления лучевой терапии на предварительно выбранном анатомическом участке тела животного, при этом система содержит первое средство визуализации для формирования информации об изображении предварительно выбранного анатомического участка, подлежащего терапии, и процессорное средство для создания плана лучевой терапии, частично, на основании информации об изображении для осуществления лучевой терапии на предварительно выбранном анатомическом участке, причем план терапии включает в себя информацию, относящуюся к числу, положению и направлению множества полых облучательных каналов, подлежащих введению внутрь анатомического участка, одному или более положениям и соответствующему времени для одного или более источников радиоактивного излучения, подлежащих введению по множеству полых облучательных каналов, и величине дозы облучения, подлежащей излучению. Система дополнительно содержит вводное средство для введения множества полых облучательных каналов в планируемые положения и планируемых направлениях в анатомический участок и средство подвода излучения для введения по меньшей мере одного источника излучения энергии по множеству полых облучательных каналов в одно или более положений в анатомический участок. В наличии имеется средство идентификации для идентификации местоположения по меньшей мере одного облучательного канала из группы множества введенных облучательных каналов, при этом идентифицированное положение сравнивается с одним или более предварительно планируемых положений, присутствующих в плане терапии.
US 2003/0065260 A1 раскрывает систему для идентификации и количественного выражения отклонений размещения игл или катетеров от заданных расположений в плане терапии для лечения органа. Иглы или катетеры могут переносить терапевтические средства для ввода в орган, во время использования в плане терапии. Система содержит устройство визуализации для визуализации органа, интерфейс интраоперационного слежения, содержащий дисплей, и компьютерное устройство, связанное электронными средствами с интерфейсом интраоперационного слежения. Компьютерное устройство выполнено с возможностью ввода заданных размещений в интерфейс интраоперационного слежения и с возможностью вычисления, для по меньшей мере одной(ого) иглы или катетера, разности в плоскости x-y между заданным размещением данной(ого) иглы или катетера и реальным размещением данной(ого) иглы или катетера. Кроме того, компьютерное устройство выполнено с возможностью вычисления, по вычисленной разности в плоскости x-y, ошибки положения для каждого из терапевтических средств, коррекции положения терапевтического средства вдоль каждой(ого) иглы или катетера на величину, подлежащую определению в соответствии с вычисленной ошибкой положения, и определения положений внесенного числа терапевтических средств посредством визуализации, выполняемой устройством визуализации.
Интервенционная система является, например, брахитерапевтической системой с высокой мощностью дозы (HDR), которая содержит несколько брахитерапевтических катетеров, подлежащих введению в целевую область. Источник радиоактивного излучения перемещают внутри брахитерапевтических катетеров в разные положения задержки, в которых источник радиоактивного излучения располагается в течение соответствующего времени задержки, чтобы воздействовать на целевую область радиоактивным излучением, испускаемым источником радиоактивного излучения.
Брахитерапевтические катетеры вводят в целевую область в то время, как для врача формируется в реальном времени и представляется ультразвуковое изображение целевой области. Кроме того, на ультразвуковое изображение в реальном времени можно налагать предоперационное изображение целевой области, которое сформировано, например, магнитно-резонансным (МР) устройством визуализации или устройством визуализации методом компьютерной томографии (CT). Упомянутые изображения ориентируют врача во время введения брахитерапевтических катетеров в целевую область. Однако, даже при ориентировании врача по изображениям, брахитерапевтические катетеры можно и не установить достаточно точно, что может привести к снижению качества результата процедуры брахитерапии.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задача настоящего изобретения состоит в создании системы, способа и компьютерной программы для поддержки выполнения интервенционной процедуры, которые обеспечивают возможность улучшенного исхода интервенционной процедуры.
В первом аспекте настоящего изобретения представлена система для поддержки выполнения интервенционной процедуры, при этом система содержит:
- первую подсистему, содержащую a) первое устройство визуализации для формирования первого изображения субъекта в то время, как интервенционное устройство вводят в субъекта, b) устройство определения положения для определения положения интервенционного устройства внутри субъекта относительно первого изображения, и c) запоминающее устройство для сохранения определенного положения интервенционного устройства внутри субъекта после того, после того, как интервенционное устройство введено в субъекта,
- вторую подсистему, содержащую a) второе устройство визуализации для формирования второго изображения субъекта с введенным интервенционным устройством, причем первое и второе устройства визуализации различаются методами визуализации, и b) устройство планирования и/или контроля для планирования терапии, подлежащей выполнению с использованием интервенционного устройства, и/или для контроля терапии, выполняемой с использованием интервенционного устройства, на основании сохраненного положения интервенционного устройства и второго изображения, причем первая подсистема и вторая подсистема расположены в разных местах.
Поскольку первое и второе изображения, которые были сформированы в разных местах, т.е., например, в разных кабинетах, сформированы разными методами визуализации, то они могут представлять одинаковые особенности по-разному, и/или признак, не видимый в одном из данных изображений, может быть видимым в другом из данных изображений. Это может приводить к совершенствованию ориентирования, планирования терапии и/или контроля терапии и, следовательно, к улучшению результата интервенционной процедуры. Например, первое интервенционное изображение может быть интервенционным ультразвуковым изображением, которое можно использовать для ориентирования врача в процессе введения брахитерапевтического катетера в субъекта, при этом второе интервенционное изображение может быть МР изображением, в котором целевая область является хорошо опознаваемой, и которое можно использовать для точного размещения источника радиоактивного излучения внутри брахитерапевтического катетера с таким расчетом, чтобы целевая область подвергалась воздействию излучения, испускаемого источником излучения.
Кроме того, поскольку положение интервенционного устройства, которое было определено устройством определения положения первой подсистемы, подается во вторую подсистему, то положение интервенционного устройства можно использовать совместно со вторым изображением для планирования терапии и/или контроля терапии, без требования, чтобы вторая подсистема начала совершенно новую процедуру определения положения для определения положения интервенционного устройства. Например, вторая подсистема может просто использовать положение, определенное первой подсистемой, или определить положение интервенционного устройства посредством идентификации интервенционного устройства во втором изображении, при рассмотрении положения, определенное первой подсистемой. В частности, процедуру идентификации, которая может быть основана на сегментации интервенционного устройства во втором изображении, можно применить только к ограниченной области второго изображения, при этом данная ограниченная область может быть задана с использованием положения, определенного первой подсистемой. Это может снижать объем технических работ, необходимых для выполнения интервенционной процедуры.
Интервенционное устройство является, предпочтительно, иглой или катетером. В предпочтительном варианте осуществления интервенционное устройство является брахитерапевтическим катетером. Устройство определения положения, предпочтительно, выполнено с возможностью определения положения интервенционного устройства посредством электромагнитного слежения или с использованием другого метода слежения, подобного оптическому измерению формы.
Первая подсистема и вторая подсистема располагаются в разных местах, т.е. на разных рабочих местах, например, в разных кабинетах одного здания или в разных зданиях. В предпочтительном случае, сохраненное положение интервенционного устройство и второе изображение выставляют друг относительно друга перед использованием устройством планирования и/или контроля в целях планирования и/или контроля. В частности, устройство определения положения может быть выполнено с возможностью определения положения интервенционного устройства относительно первого изображения, сформированного первым устройством визуализации, т.е. устройство определения положения и первое устройство визуализации могут быть выставлены друг относительно друга, при этом первое изображение и второе изображение могут быть совмещены одно с другим посредством устройства планирования и/или контроля для выставления определенного положения интервенционного устройства относительно второго изображения через посредство первого изображения.
Устройство планирования и/или контроля является устройством для планирования терапии, подлежащей выполнению с использованием интервенционного устройства, и/или для контроля терапии, выполняемой с использованием интервенционного устройства, на основании сохраненного положения интервенционного устройства и второго изображения. Таким образом, устройство планирования и/или контроля может быть a) устройством, которое способно планировать терапию, подлежащую выполнению с использованием интервенционного устройства, на основании сохраненного положения интервенционного устройства и второго изображения, но которое не способно контролировать терапию, выполняемую с использованием интервенционного устройства, на основании сохраненного положения интервенционного устройства и второго изображения, b) устройством, способным контролировать терапию, выполняемую с использованием интервенционного устройства, на основании сохраненного положения интервенционного устройства и второго изображения, но которое не способно планировать терапию, подлежащую выполнению с использованием интервенционного устройства, на основании сохраненного положения интервенционного устройства и второго изображения, или c) устройством, которое способно планировать терапию, подлежащую выполнению с использованием интервенционного устройства, на основании сохраненного положения интервенционного устройства и второго изображения и контролировать терапию, выполняемую с использованием интервенционного устройства, на основании сохраненного положения интервенционного устройства и второго изображения.
В варианте осуществления первая подсистема дополнительно содержит блок выдачи плана терапии для выдачи плана терапии, определяющего планируемое положение интервенционного устройства, и блок формирования визуального отображения для формирования визуального отображения, представляющего первое изображение, определенное положение интервенционного устройства и планируемое положение в то время, когда интервенционное устройство вводят в субъект. В частности, блок выдачи плана терапии первой подсистемы может быть выполнен с возможностью выдачи плана терапии, определяющего планируемое положение интервенционного устройства и параметр терапии, определяющий подачу энергии в субъекта с использованием интервенционного устройства, для терапии субъекта, при этом устройство планирования и/или контроля второй подсистемы может быть выполнено с возможностью коррекции параметра терапии выданного плана терапии на основании сохраненного положения интервенционного устройства и второго изображения. Например, терапия может быть брахитерапией, и план терапии может определять планируемое положение брахитерапевтического катетера внутри субъекта и, в качестве параметров терапии, время задержки и положения задержки источника излучения внутри брахитерапевтического катетера. Устройство планирования и/или контроля может быть выполнено с возможностью коррекции времени задержки и/или положений задержки на основании сохраненного положения брахитерапевтического катетера внутри субъекта и второго изображения. Данная коррекция времени задержки и/или положений задержки может приводить к совершенствованию плана терапии и, следовательно, в конечном счете, к улучшению результата терапии.
Интервенционная процедура может использовать одно или более интервенционных устройств, в частности, один или более брахитерапевтических катетеров. Соответственно, если присутствует несколько интервенционных устройств, то блок выдачи плана терапии может быть выполнен с возможностью выдачи плана терапии, определяющего планируемые положения нескольких интервенционных устройств и параметры терапии, определяющие подачу энергии в субъекта с использованием интервенционных устройств для терапии субъекта, при этом устройство планирования и/или контроля может быть выполнено с возможностью коррекции параметров терапии выданного плана терапии на основании сохраненных положений интервенционных устройств и второго изображения.
Первое устройство визуализации является, предпочтительно, устройством ультразвуковой визуализации или рентгенографии, например, рентгеноскопическим устройством. Устройство ультразвуковой визуализации или рентгенографическое устройство допускает визуализацию в реальном времени интервенционного устройства внутри субъекта, одновременно с введением интервенционного устройства, и, следовательно, адекватное ориентирование по изображениям во время процедуры введения, при относительно небольшом объеме технических работ.
Далее, второе устройство визуализации является, предпочтительно, устройством для КТ, МР томографии, позитронно-эмиссионной томографии (ПЭТ) или однофотонной эмиссионной компьютерной томографии (ОФЭКТ). Данные устройства визуализации могут формировать второе изображение, представляющее некоторые особенности субъекта и/или интервенционного устройства лучше, чем первое изображение, которое может быть ультразвуковым изображением или изображением, сформированным рентгенографическим устройством, подобным рентгеноскопическому устройству. Например, целевая область, в частности, опухоль, может быть во втором изображении, являющимся МР изображением, виднее, чем в первом изображении, являющимся ультразвуковым изображением или рентгеновским изображением, сформированным рентгеноскопическим устройством. Поэтому, использование такого второго изображения может улучшить ориентирование, обеспечиваемое изображениями, и, следовательно, результат интервенционной процедуры.
В варианте осуществления устройство планирования и/или контроля выполнено с возможностью определения целевой области внутри субъекта во втором изображении и планирования терапии, подлежащей выполнению с использованием интервенционного устройства, на основании сохраненного положения интервенционного устройства и определенной целевой области. Например, система может быть выполнена с возможностью поддержки при выполнении процедуры брахитерапии, при этом интервенционное устройство может быть брахитерапевтическим катетером, и причем устройство планирования и/или контроля может быть выполнено с возможностью планирования терапии, подлежащей выполнению с использованием интервенционного устройства, посредством определения положения задержки и времени задержки, на основании сохраненного положения интервенционного устройства и определенной целевой области. Данное планирование терапии может включать в себя коррекцию уже созданного плана терапии или создание совершенно нового плана терапии. Это может приводить к уточнению позиционирования источника радиоактивного излучения внутри субъекта для терапии мишени с использованием положения задержки и времени задержки и, следовательно, к улучшению результата терапии.
В варианте осуществления система выполнена с возможностью поддержки при выполнении интервенционной термотерапии, при этом интервенционное устройство является тепловыделяющей иглой, и причем устройство планирования и/или контроля выполнено с возможностью контроля интервенционной термотерапии на основании сохраненного положения тепловыделяющей иглы и второго изображения. Например, второе устройство визуализации может быть устройство МР визуализации, и устройство планирования и/или контроля может быть выполнено с возможностью выполнения МР термографии на основании сохраненного положения тепловыделяющей иглы и МР изображения, являющегося вторым изображением. Таким образом, МР термографию можно выполнять без обязательного требования идентификации тепловыделяющей иглы во втором изображении или посредством идентификации тепловыделяющей иглы во втором изображении, при рассмотрении уже определенного положения тепловыделяющей иглы, что уменьшает объем технических работ, необходимых для выполнения интервенционной процедуры.
В другом варианте осуществления система выполнена с возможностью поддержки при выполнении интервенционной селективной внутренней лучевой терапии (SIRT), при этом интервенционное устройство является катетером для подачи радиоактивных частиц, и причем устройство планирования и/или контроля выполнено с возможностью контроля подачи радиоактивных частиц посредством катетера на основании сохраненного положения катетера и второго изображения. Таким образом, для контроля подачи радиоактивны частиц посредством катетера, не обязательно требуется идентифицировать катетер во втором изображении для определения его положения, или катетер можно идентифицировать во втором изображении упрощенным способом, при рассмотрении уже определенного положения катетера. Это может уменьшать объем технических работ, необходимых для выполнения интервенционной процедуры.
В варианте осуществления устройство планирования и/или контроля выполнено с возможностью планирования терапии, подлежащей выполнению с использованием интервенционного устройства, и/или контроля терапии, выполняемой с использованием интервенционного устройства, также на основании первого изображения. Таким образом, первое изображение можно использовать не только для ориентирования врача в процессе введения интервенционного устройства в субъекта, но также для планирования терапии и/или контроля терапии. Дополнительное применение первого изображения может дополнительно совершенствовать планирование и/или контроль и, следовательно, результат интервенционной процедуры.
В дополнительном аспекте настоящего изобретения предлагается способ поддержки выполнения интервенционной процедуры, при этом способ содержит следующие этапы:
- формируют первое изображение субъекта в то время, как интервенционное устройство вводят в субъекта, посредством первого устройства визуализации первой подсистемы системы по пункту 1 формулы изобретения,
- определяют положение интервенционного устройства внутри субъекта относительно первого изображения посредством устройства определения положения первой подсистемы,
- сохраняют определенное положение интервенционного устройства внутри субъекта посредством запоминающего устройства после того, как интервенционное устройство введено в субъекта,
- формируют второе изображение субъекта посредством второго устройства визуализации второй подсистемы системы, причем первое и второе устройства визуализации различаются методами визуализации, и
- планируют терапию, подлежащую выполнению с использованием интервенционного устройства, и/или контроль терапии, выполняемой с использованием интервенционного устройства, на основании сохраненного положения интервенционного устройства и второго изображения посредством устройства планирования и/или контроля второй подсистемы.
В дополнительном аспекте настоящего изобретения предлагается компьютерная программа для поддержки выполнения интервенционной процедуры, при этом компьютерная программа содержит средство, инструктирующее систему по пункту 1 формулы изобретения выполнять способ по пункту 12 формулы изобретения, когда компьютерная программа выполняется в системе.
Следует понимать, что система по пункту 1, способ по пункту 12 и компьютерная программа по пункту 13 имеют сходные и/или идентичные предпочтительные варианты осуществления, в частности, определенные в зависимых пунктах формулы изобретения.
Следует понимать, что предпочтительный вариант осуществления настоящего изобретения может быть также комбинацией зависимых пунктов или вышеописанных вариантов осуществления с соответствующим независимым пунктом.
Приведенные и другие аспекты изобретения будут очевидны из пояснения со ссылкой на варианты осуществления, описанные ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На следующих чертежах:
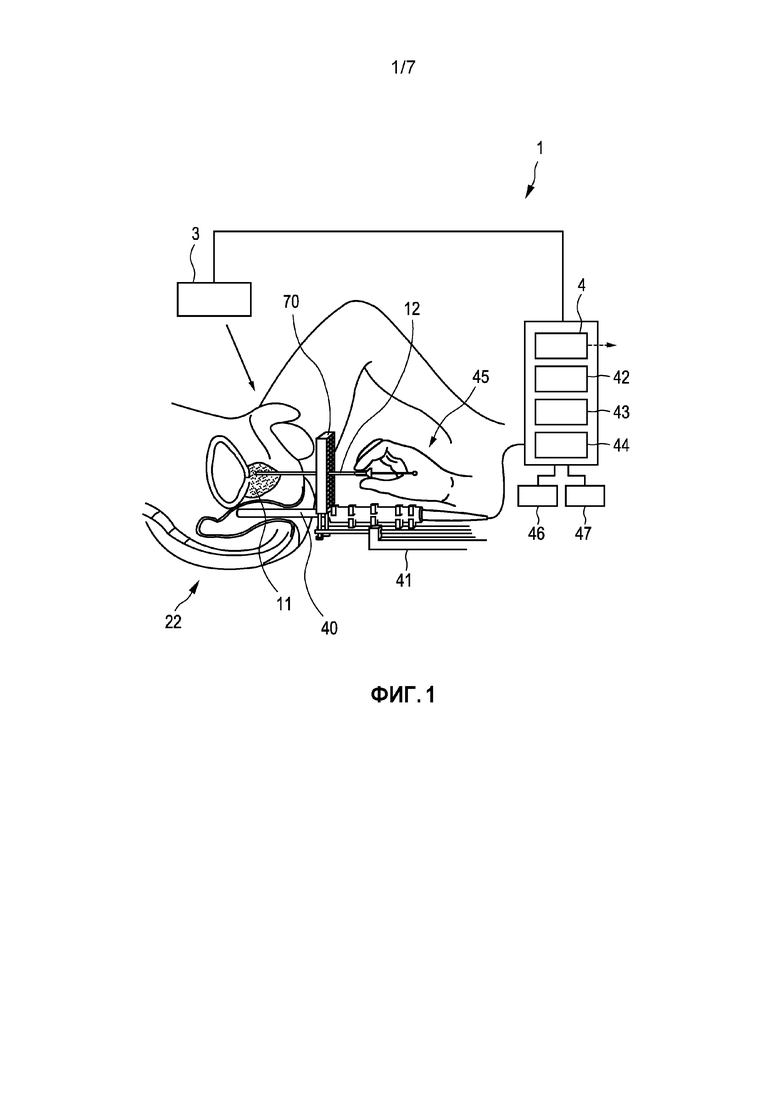
Фиг. 1 - примерное схематическое представление первой подсистемы варианта осуществления системы для поддержки выполнения интервенционной процедуры,
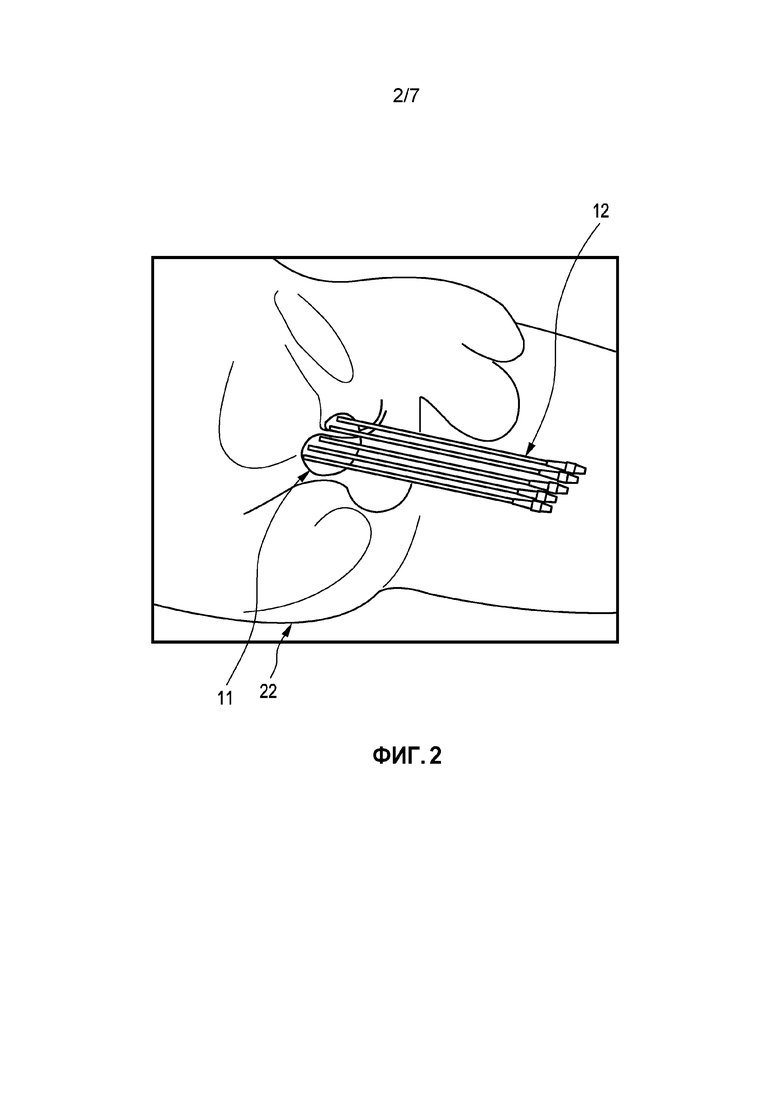
Фиг. 2 - примерное схематическое представление расположения брахитерапевтических катетеров внутри простаты,
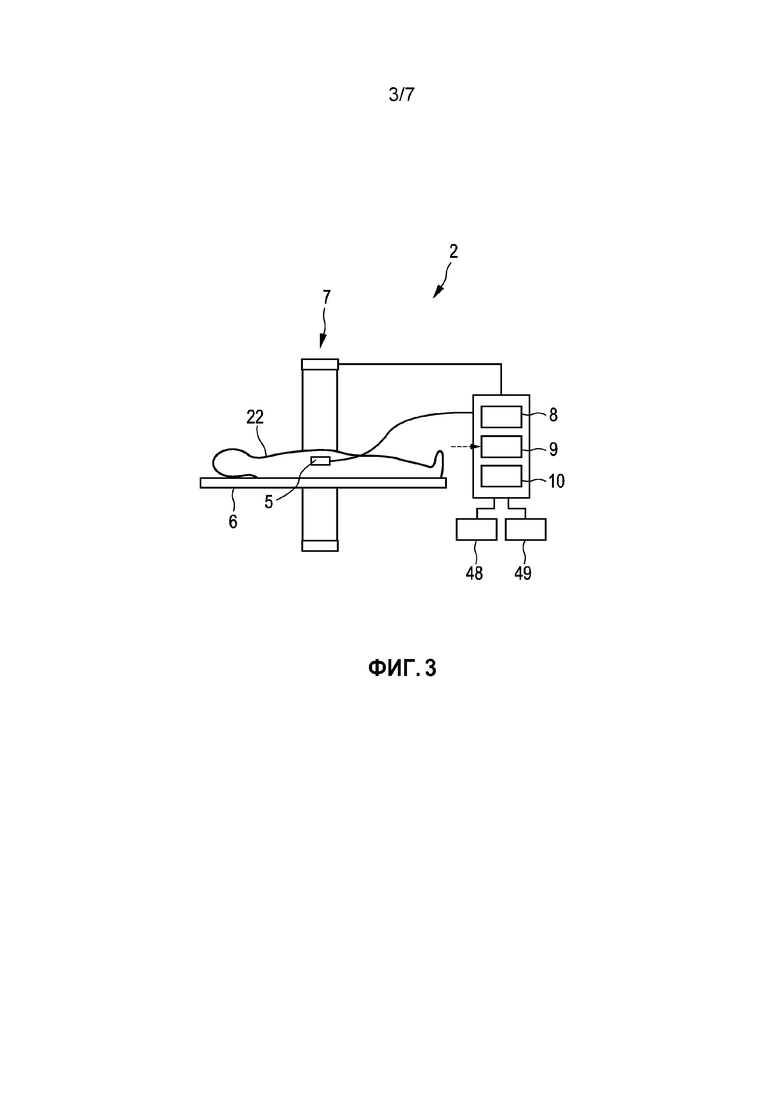
Фиг. 3 - примерное схематическое представление второй подсистемы системы для поддержки выполнения интервенционной процедуры,
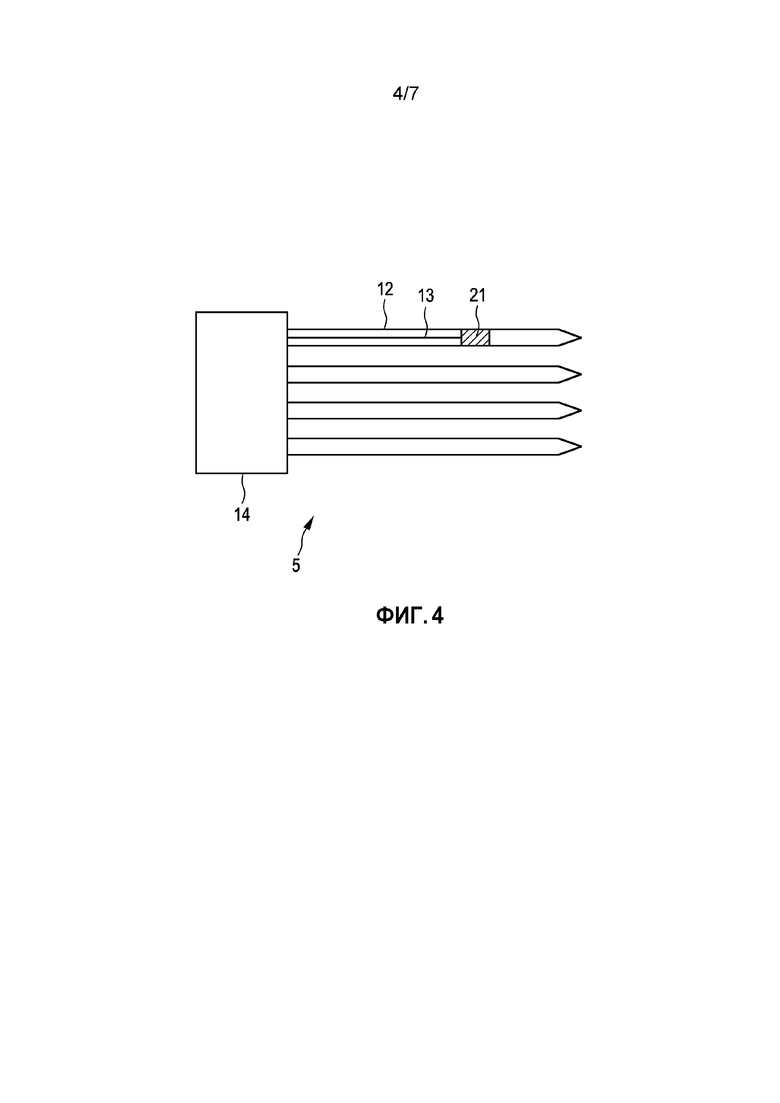
Фиг. 4 - примерное схематическое представление установочного устройства второй подсистемы,
Фиг. 5 - блок-схема последовательности операций, поясняющая, в качестве примера, вариант осуществления способа для поддержки выполнения интервенционной процедуры,
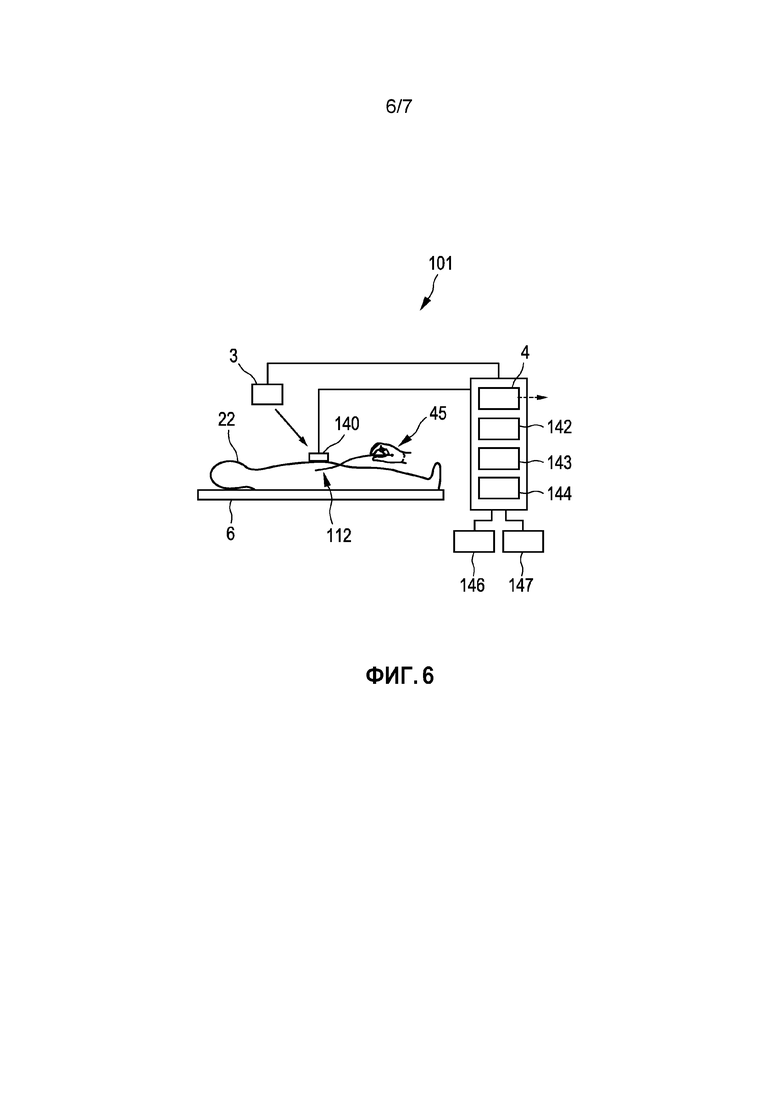
Фиг. 6 - примерное схематическое представление первой подсистемы другого варианта осуществления системы для поддержки выполнения интервенционной процедуры, и
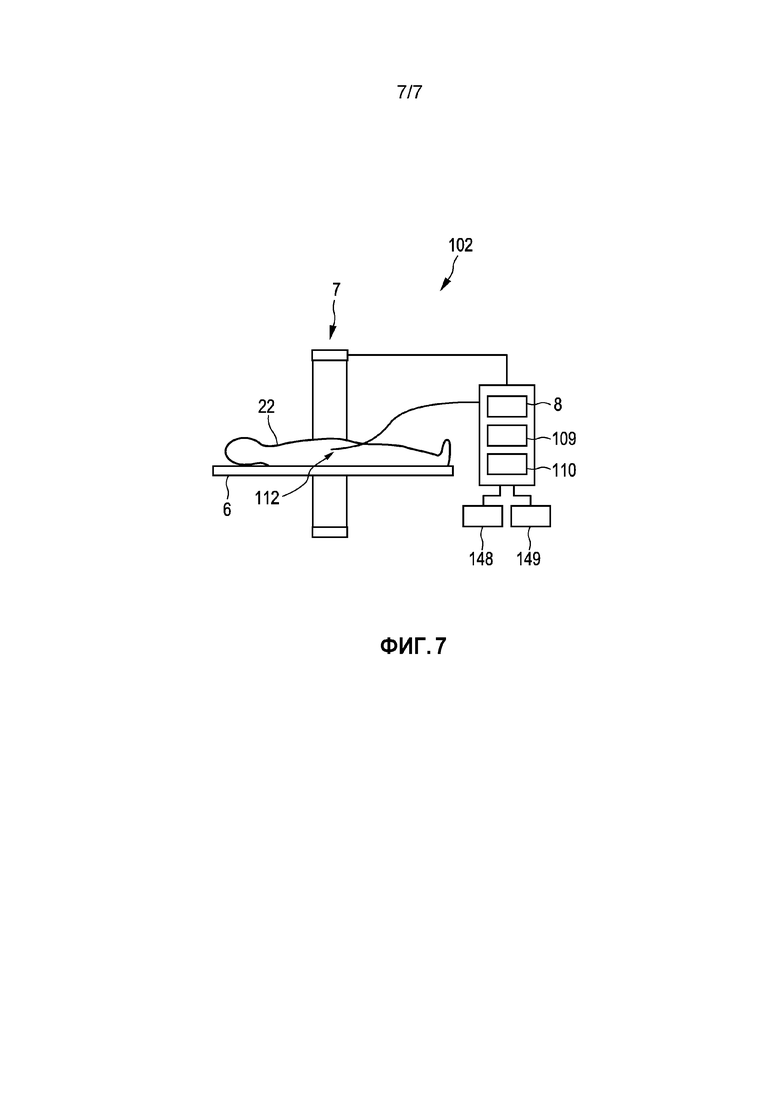
Фиг. 7 - примерное схематическое представление второй подсистемы дополнительного варианта осуществления системы для поддержки выполнения интервенционной процедуры.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Фиг. 1 и 3 схематически и примерно представляют подсистемы системы для поддержки выполнения интервенционной процедуры. В частности, фиг. 1 представляет первую подсистему 1, содержащую первое устройство 40, 42 визуализации для формирования первого изображения субъекта 22 в то время, как интервенционное устройство 12 вводят в субъекта 22. В данном варианте осуществления система выполнена с возможностью поддержки при выполнении процедуру брахитерапии с HDR, при этом интервенционное устройство 12 является брахитерапевтическим катетером, подлежащим введению в простату 11 субъекта 22 через шаблон 70. Шаблон 70 является крепежным элементом для крепления и направления брахитерапевтического катетера 12, при введении брахитерапевтического катетера 12 в простату 11. Шаблон 70 содержит прямоугольную сетку отверстий, через которые брахитерапевтический катетер 12 можно вводить в простату 11. В предпочтительном варианте, в простату 11 вводят несколько брахитерапевтических катетеров 12, как схематически примерно показано на фиг. 2.
Первое устройство визуализации содержит трансректальный ультразвуковой (TRUS) датчик 40 и блок 42 управления ультразвуком для управления TRUS датчиком 40 и для формирования ультразвукового изображения по сигналам, принятым из TRUS датчика 40. Ультразвуковое изображение является изображением в реальном времени, представляющим субъекта 22 в то время, как врач вводит брахитерапевтический катетер 12 в простату 11 своей рукой 45. TRUS датчик 40 удерживается крепежным элементом 41, который можно закреплять к столу пациента, на котором может располагаться субъект 22, или к другому средству, имеющему фиксированное положение относительно субъекта 22.
Первая подсистема 1 дополнительно содержит устройство 3 определения положения для определения положения соответствующего брахитерапевтического катетера 12 внутри субъекта 22. В данном варианте осуществления устройство 3 определения положения выполнено с возможностью взаимодействия с электромагнитным датчиком, содержащимся в соответствующем брахитерапевтическом катетере 12 для определения положения соответствующего брахитерапевтического катетера 12 посредством электромагнитного слежения. В другом варианте осуществления устройство определения положения может быть выполнено с возможностью определения положения соответствующего брахитерапевтического катетера 12 другим способом, например, посредством оптического измерения формы. Первое устройство 40, 42 визуализации и устройство 3 определения положения выполнены так, что положение соответствующего брахитерапевтического катетера 12 внутри субъекта 22 определяется относительно сформированного первого изображения. Определенное положение соответствующего брахитерапевтического катетера 12 внутри субъекта 22 сохраняется в запоминающем устройстве 4 после того, как соответствующий брахитерапевтический катетер 12 введен в субъекта 22. Таким образом, в запоминающем устройстве 4 сохраняется по меньшей мере положение соответствующего брахитерапевтического катетера 12, которое было определено после того, как была закончена процедура введения и позиционирования для соответствующего брахитерапевтического катетера 12 в первой подсистеме 1.
Первая подсистема 1 дополнительно содержит блок 43 выдачи плана терапии для выдачи плана терапии, определяющего планируемые положения брахитерапевтических катетеров 12 и, в качестве дополнительных параметров терапии, положения задержки и время задержки для источника радиоактивного излучения внутри брахитерапевтических катетеров 12. Блок 43 выдачи плана терапии может быть выполнен с возможностью только выдачи уже определенного плана терапии, или блок 43 выдачи плана терапии может быть выполнен с возможностью определения плана терапии. Например, блок 43 выдачи плана терапии может быть выполнен с возможностью определения плана терапии на основании заданного положения, формы и размера целевой области, подлежащей воздействию, например, опухоли внутри простаты 11, с использованием известных алгоритмов плана терапии, которые делают попытку определения положений брахитерапевтических катетеров и времени задержки и положения задержки источника радиоактивного излучения внутри брахитерапевтических катетеров таким образом, чтобы целевая область получала как можно больше радиации, обеспечиваемой источником радиоактивного излучения, и окружающие ткани не получали нисколько или получали лишь немного излучения. Положение, форму и размер целевой области можно получить, например, сегментацией целевой области в первом изображении или в другом предоперационном изображении, которое может быть, например, МР изображением или КТ изображением.
Первая подсистема 1 дополнительно содержит блок 44 формирования визуального отображения для формирования визуального отображения, представляющего первое изображение, определенное положение соответствующего брахитерапевтического катетера 12, т.е. прослеженного текущего положения соответствующего брахитерапевтического катетера 12 и планируемое положение соответствующего брахитерапевтического катетера 12, которое определено планом терапии в то время, когда соответствующий брахитерапевтический катетер 12 вводят в субъекта 22. Сформированное визуальное отображение представляется на дисплее 47 для обеспечения ориентирования врача по изображению в то время, когда врач пробует ввести соответствующий брахитерапевтический катетер 12 в соответствии с выданным планом терапии.
Первая подсистема 1 дополнительно содержит блок 46 ввода, например, клавиатуру, компьютерную мышь, сенсорную панель и так далее, чтобы давать врачу возможность обеспечивать вводы данных в первую подсистему 1. Например, при посредстве блока 46 ввода врач может указывать, что следует начать или следует приостановить процедуру введения с ориентированием по изображениям, включающая в себя формирование визуального отображения, показывающего первое изображение в реальном времени, текущее прослеженное положение соответствующего брахитерапевтического катетера 12 и соответствующее планируемое положение, определяемое выданным планом терапии. Блок 46 ввода может быть также выполнен с возможностью выполнения врачом модификации положения, формы и/или размера целевой области и указания, что план терапии следует определить с учетом модифицированной целевой области.
Первая подсистема 1 располагается в первом месте в больнице, т.е., например, в первом кабинете больницы. Вторая подсистема, схематично и примерно показанная на фиг. 3, располагается во втором месте, т.е., например, во втором кабинете больницы. Таким образом, после того, как брахитерапевтические катетеры 12 введены в субъекта 22, субъекта 22 перемещают во второе место, чтобы продолжить процедуру терапии на втором месте.
Вторая подсистема 2 содержит второе устройство 7, 8 визуализации для формирования второго изображения субъекта 22 с введенными брахитерапевтическими катетерами 12, при этом первое устройство 40, 42 визуализации и второе устройство 7, 8 визуализации различаются методами визуализации. В данном варианте осуществления второе устройство визуализации содержит блок 7 сбора МР данных для сбора МР данных субъекта 22, при введенных брахитерапевтических катетерах 12, и блок 8 управления МР сканером для управления блоком 7 сбора МР данных и для формирования МР изображения субъекта 22, при введенных брахитерапевтических катетерах 12, на основании МР данных, собранных блоком 7 сбора МР данных. В других вариантах осуществления второе устройство визуализации может быть также другим средством визуализации, например, компьютерным томографом (КТ) или устройством радионуклидной визуализации, например, устройством ПЭТ или устройством ОФЭКТ.
Вторая подсистема дополнительно содержит устройство 9 планирования и/или контроля для планирования терапии, подлежащей выполнению с использованием брахитерапевтических катетеров 12, и/или для контроля терапии, выполняемой с использованием брахитерапевтических катетеров 12, на основании положений, сохраненных в запоминающем устройстве 4 первой подсистемы 1, и сформированного второго изображения. Таким образом, устройство 9 планирования и/или контроля выполнено с возможностью приема положений, определенных устройством 3 определения положения первой подсистемы 1 и сохраненных в запоминающем устройстве 4, и использования данных сохраненных положений брахитерапевтических катетеров 12 в целях планирования и/или контроля. Устройство 9 планирования и/или контроля предпочтительно выполнено с возможностью выставления первого изображения и второго изображения друг относительно друга с тем, чтобы, так как положения брахитерапевтических катетеров 12 были определены относительно первого изображения, положения брахитерапевтических катетеры 12 были также известны относительно второго изображения. В данном варианте осуществления устройство 9 планирования и/или контроля выполнено с возможностью идентификации положения, формы и размера целевой области внутри второго изображения и с возможностью коррекции плана терапии, выданного блоком 43 выдачи плана терапии, в частности, времени задержки и положений задержки источника радиоактивного излучения, на основании определенных положений брахитерапевтических катетеров 12 и положения, формы и размера целевой области, полученных из второго изображения. Например, устройство 9 планирования и/или контроля может быть выполнено с возможностью сегментации целевой области во втором изображении и обеспечения пользовательского интерфейса, чтобы предоставлять врачу возможность модификации сегментации и, после возможной модификации сегментации врачом, подтверждать положение, форму и размер целевой области. Для упомянутой коррекции уже выданного плана терапии можно также использовать известные алгоритмы планирования терапии. Устройство 9 планирования и/или контроля может быть также выполнено с возможностью определения нового плана, без использования плана терапии, ранее выданного блоком 43 выдачи плана терапии первой подсистемы 1. В данном случае можно также использовать второе изображение и положения брахитерапевтических катетеров 12, определенные устройством 3 определения положения и известных алгоритмов планирования терапии.
Устройство 9 планирования и/или контроля может быть выполнено с возможностью обеспечения плана терапии, который не определяет положения задержки во всех введенных брахитерапевтических катетерах 12, если нет необходимости в перемещении источника 21 радиоактивного излучения внутри каждого брахитерапевтического катетера 12 для воздействия на целевую область. Таким образом, устройство 9 планирования и/или контроля может быть выполнено с возможностью пропуска без внимания одного или более брахитерапевтических катетеров, если они не нужны для терапии. Кроме того, устройство 9 планирования и/или контроля может быть выполнено с возможностью указания, если оно не способно создать план терапии, достаточно воздействующей на целевую область, на основании текущих положений и/или числа брахитерапевтических катетеров. Например, распределение дозы, основанное на плане терапии, который является максимально оптимальным при определенных текущих положениях и числе брахитерапевтических катетеров, может быть вычислено устройством 9 планирования и/или контроля и показано на дисплее 47, в частности, с наложением по нему по меньшей мере сегментированной целевой области. Затем пользователь может решить, следует ли изменить положения одного или более брахитерапевтических катетеров, и/или следует ли добавить дополнительный брахитерапевтический катетер, при этом, для упомянутого изменения положений и/или числа брахитерапевтических катетеров, субъекта можно переместить обратно к первой подсистеме 1 в первое место. Устройство 9 планирования и/или контроля может быть также выполнено с возможностью создания оптимизированного плана терапии путем рассмотрения возможных других положений брахитерапевтических катетеров и/или возможного другого числа брахитерапевтических катетеров, при этом полученные положения и полученное число можно использовать в первой подсистеме для соответствующего введения брахитерапевтических катетеров.
Вторая подсистема 2 выполнена с возможностью фактического выполнения процедуры брахитерапии с использованием блока 5 размещения для размещения источника радиоактивного излучения внутри брахитерапевтических катетеров 12 в соответствии с планом терапии, обеспеченным устройством 9 планирования и/или контроля. Блок 5 размещения схематически и примерно изображен на фиг. 4. Блок 5 размещения содержит приводную проволоку 13, к которой прикреплен источник 21 радиоактивного излучения, при этом приводную проволоку 13 с источником 21 радиоактивного излучения можно перемещать внутри каждого из брахитерапевтических катетеров 12 для размещения источника 21 радиоактивного излучения в планируемых положениях задержки в течение планируемого времени задержки. Блок 5 размещения дополнительно содержит блок 14 перемещения, который можно также рассматривать как блок автоматической подачи источника, и который выполнен с возможностью введения источника 21 радиоактивного излучения в разные брахитерапевтические катетеры 12 и перемещения источника 21 радиоактивного излучения внутри них посредством электродвигателя. В частности, блок 14 перемещения может быть выполнен с возможностью приведения в движение источника 21 радиоактивного излучения посредством устройства пошагового перемещения, которое соединено с разными брахитерапевтическими катетерами 12. Более подробная информация, касающаяся такого рода размещения источника 21 радиоактивного излучения внутри субъекта 22, приведена в публикации “A Practical Guide to Quality Control of Brachytherapy Equipment” под редакцией J. Venselaar и J. Perez-Calatayud, European Society for Therapeutic Radiology and Oncology (2004), которая включена в настоящую заявку путем ссылки.
Блок размещения может содержать дополнительные элементы для поддержки размещения источника радиоактивного излучения в планируемых положениях задержки в течение планируемого времени задержки внутри субъекта 22. Например, блок размещения может содержать шаблон, который можно использовать для удерживания катетеров в их положениях внутри субъекта 22.
Блок 5 размещения, в частности, блок 14 перемещения, находится под управлением блока 10 управления брахитерапией таким образом, что источник 21 радиоактивного излучения размещается в планируемых положениях задержки в течение планируемого времени задержки. Источник 21 радиоактивного излучения является, например, Ir-192 или другим источником, испускающим радиоактивное излучение.
Устройство 9 планирования и/или контроля может быть также выполнено с возможностью контроля, например, опухание простаты или другой части субъекта 22 во время процедуры брахитерапии путем использования второго изображения, которое может обеспечиваться в разные моменты времени, в частности, в реальном времени, чтобы контролировать опухание. Устройство 9 планирования и/или контроля может быть дополнительно выполнено с возможностью коррекции плана терапии на основании контролируемого опухания и с возможностью подачи скорректированного плана терапии в блок 10 управления брахитерапией, чтобы обеспечивать возможность адаптации в реальном времени процедуры брахитерапии в соответствии с опуханием.
Вторая подсистема 2 дополнительно содержит блок 48 ввода, например, клавиатуру, компьютерную мышь или сенсорную панель, и блок 49 вывода, например, дисплей.
Далее приведено примерное описание варианта осуществления способа поддержки выполнения интервенционной процедуры, со ссылкой на блок-схему последовательности операций способа, показанную на фиг. 5.
На этапе 201 брахитерапевтические катетеры 12 вводят в субъекта 22 на первом месте с помощью первой подсистемы 1. В процессе введения брахитерапевтических катетеров 12 в субъекта 22, первым устройством 40, 42 визуализации формируется первое изображение в реальном времени для ориентирования врача. Кроме того, на этапе 201, устройством 3 определения положения первой подсистемы 1 определяются положения брахитерапевтических катетеров 12 внутри субъекта 22. Определяется по меньшей мере положение соответствующего брахитерапевтического катетера 12 после того, как он был введен в субъекта 22, т.е. после того, как процедура введения завершена, и данное определенное положение сохраняется в запоминающем устройстве 4.
На этапе 202, субъекта 22 с введенными брахитерапевтическими катетерами 12 перемещают во второе место, где находится вторая подсистема 2. На этапе 203 формируется второе изображение субъекта 22 посредством второго устройства 7, 8 визуализации второй подсистемы 2, и терапия, подлежащая выполнению с использованием брахитерапевтических катетеров 12, планируется, и/или терапия, выполняемая с использованием брахитерапевтических катетеров 12, контролируется на основании положений брахитерапевтических катетеров 12, хранящихся в запоминающем устройстве 4 первой подсистемы 1, и сформированного второго изображения посредством устройства 9 планирования и/или контроля второй подсистемы 2. В частности, создается план, определяющий положения задержки и время задержки источника 21 радиоактивного излучения внутри брахитерапевтических катетеров 12, на основании сохраненных положений брахитерапевтических катетеров 12 и положения, формы и размера целевой области, полученных из второго изображения. Кроме того, на этапе 203, на втором месте, источник 21 радиоактивного излучения можно переместить внутри брахитерапевтических катетеров 12 в соответствии с созданным планом терапии, чтобы доставить дозу излучения в целевую область, при этом, в процессе данной доставки дозы излучения, можно контролировать возможное опухание простаты или других частей субъекта 22, и причем упомянутое контролируемое опухание можно использовать для коррекции плана терапии. Скорректированный план терапии может быть использован блоком 10 управления брахитерапией для создания возможности адаптации текущей процедуры брахитерапии в соответствии с опуханием.
Фиг. 6 и 7 схематически примерно представляют первую и вторую подсистемы, соответственно, дополнительного варианта осуществления системы для поддержки выполнения интервенционной процедуры. Первая подсистема 101 расположена в первом месте и содержит первое устройство визуализации для формирования первого изображения субъекта 22 в то время, когда тепловыделяющая игла 112 вводится в субъекта 22 рукой 45 врача. Субъект 22 расположен на средстве для опоры, например, столе 6 для пациента. Первое устройство визуализации содержит ультразвуковой датчик 140, располагаемый на коже снаружи субъекта 22, и блок 142 управления ультразвуком для формирования в реальном времени ультразвукового изображения в качестве первого изображения. Первая подсистема 101 дополнительно содержит устройство 3 определения положения для определения положения тепловыделяющей иглы 112 внутри субъекта 22. Кроме того, в данном варианте осуществления устройство определения положения 3 и тепловыделяющая игла 112 могут быть выполнены с возможностью определения положения тепловыделяющей иглы 112 методом электромагнитного слежения или оптического измерения формы. Положение тепловыделяющей иглы 112, предпочтительно, определяется относительно сформированного первого изображения и сохраняется в запоминающем устройстве 4. Первая подсистема 101 дополнительно содержит блок 143 выдачи плана терапии для выдачи плана терапии, определяющего по меньшей мере планируемое положение тепловыделяющей иглы 112. В данном варианте осуществления план терапии также определяет в качестве дополнительных параметров терапии количество и/или направление подачи подводимого тепла. Блок 143 выдачи плана терапии может быть выполнен с возможностью выдачи уже определенного плана терапии или самостоятельного определения плана терапии. В последнем случае, блок 143 выдачи плана терапии может быть выполнен с возможностью определения плана терапии на основании положения, формы и размера целевой области для воздействия, с использованием известных алгоритмов планирования терапии. Положение, форму и размеры целевой области можно определять с использованием первого изображения или с использованием предоперационного изображения, которое может быть МР изображением или КТ изображением. На дисплее 147 может представляться графический пользовательский интерфейс, позволяющий врачу, при посредстве блока 146 ввода, например, клавиатуры, компьютерной мыши, сенсорной панели и так далее, модифицировать положение, форму и размер области терапии и, после того, как положение, форма и/или размер уже возможно модифицированы, подтверждать положение, форму и размер целевой области.
Первая подсистема 101 дополнительно содержит блок 144 формирования визуального отображения для формирования визуального отображения, представляющего первое изображение, определенное положение тепловыделяющей иглы 112, т.е. текущее положение тепловыделяющей иглы 112, прослеженное устройством 3 определения положения, и планируемое положение тепловыделяющей иглы 112 в то время, когда тепловыделяющую иглу 112 вводят в субъекта 22. Данное визуальное отображение предпочтительно формируется в реальном времени и представляется на дисплее 147, чтобы обеспечивать ориентирование врача по изображению.
Вторая подсистема 102 расположена во втором месте и содержит второе устройство 7, 8 визуализации для формирования второго изображения субъекта 22 с введенной тепловыделяющей иглой 112. В данном варианте осуществления второе устройство визуализации также содержит блок 7 сбора МР данных и блок 8 управления МР сканером для формирования МР изображения в качестве второго изображения. Вторая подсистема 102 дополнительно содержит устройство 109 планирования и/или контроля для планирования терапии, подлежащей выполнению с использованием тепловыделяющей иглы 112, и/или для контроля терапии, выполняемой с использованием тепловыделяющей иглы 112, на основании сохраненного положения тепловыделяющей иглы 112 и второго изображения. В частности, устройство 109 планирования и/или контроля выполнено с возможностью контроля интервенционной термотерапии на основании сохраненного положения тепловыделяющей иглы 112 и второго изображения, при этом, в данном случае, второе изображение предпочтительно является изображением в реальном времени. Например, устройство 109 планирования и/или контроля может быть выполнено с возможностью осуществления МР термографии на основании сохраненного положения тепловыделяющей иглы 112 и МР изображения, при этом получаемое распределение температуры может представляться на дисплее 149. Дополнительно, определенное распределение температуры может быть использовано блоком 110 управления термотерапией для управления подачей тепла в целевую область, в зависимости от определенного распределения температуры. Устройство 109 планирования и/или контроля может быть также выполнено с возможностью коррекции плана терапии, выданного блоком 143 выдачи плана терапии, в зависимости от положения, формы и размера целевой области, получаемых из второго изображения, и в зависимости от сохраненного положения тепловыделяющей иглы 112. Данная коррекция плана терапии может включать в себя модификацию количества и/или направления подачи тепла, подлежащего подаче в целевую область. Устройство 109 планирования и/или контроля может быть также выполнено с возможностью создания нового плана терапии на основании сохраненного положения тепловыделяющей иглы 112 и положения, формы и размера целевой области, получаемых из второго изображения, без использования плана терапии, выданного блоком 143 выдачи плана терапии. Вторая подсистема 102 содержит также блок 148 ввода, например, клавиатуру, компьютерную мышь, сенсорную панель и так далее.
В дополнительном варианте осуществления система может быть выполнена с возможностью поддержки осуществления процедуры SIRT, при этом интервенционное устройство может быть катетером для подачи радиоактивных частиц, причем катетер можно размещать с использованием, например, первой подсистемы, расположенной в первом месте, как описано выше со ссылкой на фиг. 6, причем первое устройство визуализации формирует первое изображение субъекта в то время, когда катетер вводят в субъекта, устройство определения положения, например, электромагнитное следящее устройство определяет положение катетера внутри субъекта, и запоминающее устройство сохраняет определенное положение катетера внутри субъекта после того, как катетер введен в субъекта. Кроме того, вторую подсистему, расположенную во втором месте, как описано, например, со ссылкой на фиг. 7, можно использовать для контроля подачи радиоактивных частиц катетером на основании сохраненного положения катетера и второго изображения. Таким образом, второе устройство визуализации может формировать второе изображение субъекта с введенным катетером, при этом первое и второе устройства визуализации различаются методами визуализации, и устройство планирования и/или контроля может контролировать подачу радиоактивных частиц катетером на основании сохраненного положения катетера и второго изображения. Подача радиоактивных частиц может осуществляться под управлением блока управления процедурой SIRT согласно соответствующему плану терапии, при этом данный план терапии может быть скорректирован на основании контролируемой подачи радиоактивных частиц посредством устройства планирования терапии и/или контроля. Скорректированный план терапии может применяться блоком управления процедурой для адаптации процедуры SIRT соответственно текущей подаче радиоактивных частиц, в частности, соответственно текущему распределению радиоактивных частиц внутри субъекта. Устройство планирования и/или контроля может быть также выполнено с возможностью создания нового плана терапии на основании определенного положения катетера и на основании второго изображения, при этом блок управления процедурой SIRT может управлять подачей радиоактивных частиц на основании нового плана терапии. Кроме того, в данном варианте осуществления первое изображение является, предпочтительно, ультразвуковым изображением, и второе изображение является, предпочтительно, МР изображением, при этом первая подсистема и вторая подсистема предпочтительно расположены в разных кабинетах больницы.
Описанные системы предпочтительно относятся к области интервенционной онкологии, в частности, к фокальной терапии под контролем мультимодальных изображений. В первом месте, с помощью первой подсистемы, интервенционное устройство, например, иглу или другой инструмент позиционируют внутри или вблизи, например, опухоли, чтобы доставить терапевтическую дозу аблативной энергии, при этом фокальная терапия может относиться к брахитерапии, криотерапии, радиочастотной (РЧ) абляции, высокочастотной абляции, лазерной обляции, электропорации и так далее. Первая подсистема поддерживает данное позиционирование посредством выдачи первого изображения, которое является, предпочтительно, изображением в реальном времени, и посредством интегрирования технологии навигации в интервенционное устройство, например, электромагнитного слежения или слежения методом оптического измерения формы, чтобы допускать отображение положения интервенционного устройства в сочетании с первым изображением, которое может быть медицинским изображением поражения.
Система с первой подсистемой, содержащей первое устройство визуализации, и второй подсистемой, содержащей второе устройство визуализации, может допускать формирование изображений разными методами визуализации в процессе вмешательства. В частности, комплексная система поддерживает ориентирование по мультимодальным изображениям в разных местах в больнице. Терапию можно начинать с одной подсистемы, использующей один метод визуализации, после чего терапию можно продолжить на другой подсистеме, объединяющей первоначальные результаты, полученные с помощью первой подсистемы, с одним или более вторыми изображениями, которые поддерживают выполнение следующей задачи с помощью второй подсистемы.
В варианте осуществления второе устройство визуализации второй подсистемы является компьютерным томографом для формирования компьютерно-томографического изображения в качестве второго изображения. В данном варианте осуществления устройство планирования и/или контроля выполнено с возможностью идентификации интервенционного устройства в компьютерно-томографическом изображении, чтобы определить его положение и создать план терапии для лечения субъекта на основании упомянутого определенного положения. Идентификация интервенционного устройства в компьютерно-томографическом изображении использует положение, определенное устройством определения положения первой подсистемой, например, для задания области в компьютерно-томографическом изображении, которую следует обработать алгоритмом сегментации для идентификации интервенционного устройства. Например, устройство определения положения может определить положение брахитерапевтического катетера на первом месте, при этом брахитерапевтический катетер был введен в субъекта под ультразвуковым контролем, т.е., когда первое устройство визуализации формировало ультразвуковое изображение в реальном времени. Прослеженное положение брахитерапевтического катетера может быть представлено в устройство планирования и/или контроля второй подсистемы, чтобы создать план терапии методом брахитерапии на основании данного положения и компьютерно-томографического изображения, являющегося вторым изображением в данном варианте осуществления, при этом текущее положение брахитерапевтического катетера в компьютерно-томографическом изображении может определяться с использованием, помимо прочего, электромагнитно отслеженного положения брахитерапевтического катетера, определенного устройством определения положения первой подсистемы.
Хотя в вышеописанных вариантах осуществления первое устройство визуализации является устройством ультразвуковой визуализации, в других вариантах осуществления первое устройство визуализации может использовать другой метод визуализации. Например, первое устройство визуализации может быть интервенционным рентгенографическим устройством, например, рентгеноскопическим устройством. В частности, в случае процедуры SIRT, для обеспечения наведения по изображениям можно использовать интервенционное рентгенографическое устройство, при проведении катетеров к целевому местоположению. После того, как катетер установлен в заданное место, субъекта перемещают в другое место, например, в другой кабинет, с второй подсистемой, содержащей второе устройство визуализации, например, устройство МР визуализации или устройство визуализации методом ПЭТ/КТ, при этом изображения, сформированные соответствующим устройством визуализации, можно использовать для обеспечения контролируемого высвобождения радиоактивных частиц, включая адаптивную модуляцию терапии. Например, устройство планирования и/или контроля может быть выполнено с возможностью определения распределения радиоактивных частиц внутри субъекта на основании второго изображения, чтобы адаптировать план терапии на основании определенного распределения радиоактивных частиц, и чтобы представить адаптированный план терапии в блок управления, управляющий высвобождением радиоактивных частиц.
В предпочтительном варианте, первое изображение, положение интервенционного устройства, определенное устройством определения положения, и второе устройство визуализации выставляют друг относительно друга. В варианте осуществления устройство планирования и/или контроля может быть выполнено с возможностью выставления первого изображения и второго изображения друг относительно друга на основе выделения органов в первом и втором изображениях, при этом такие выделения в первом и втором изображениях могут вычисляться автоматически, с использованием известных алгоритмов сегментации, вручную или полуавтоматически, причем, в последнем случае, пользователю предоставлена возможность модифицировать автоматически сформированную сегментацию. Однако, устройство планирования и/или контроля может быть также, разумеется, выполнено с возможностью использования других методов выставления, которые могут исходить только из интенсивности изображений.
Хотя в вышеописанных вариантах осуществления описаны некоторые системы для поддержки выполнения некоторых интервенционных процедур, в других вариантах осуществления, для поддержки выполнения других интервенционных процедур можно также применить другие системы, которые содержат первую подсистему и вторую подсистему по п. 1 формулы изобретения. Например, система может быть выполнена с возможностью поддержки выполнения процедуры криотерапии, процедуры брахитерапии с импульсной мощностью дозы (PDR), процедуры брахитерапии с низкой мощностью дозы (LDR), процедуры лазерной абляции и так далее.
Хотя в вышеописанных вариантах осуществления система содержит первую подсистему и вторую подсистему, система может также содержать больше двух подсистем, при этом положение интервенционного устройства, определенное в первой подсистеме, может сохраняться и использоваться другой подсистемой, вместе с изображением, сформированным другой подсистемой в целях планирования терапии и/или контроля.
В процессе практического осуществления заявленного изобретения могут быть выявлены и внесены изменения в раскрытые варианты осуществления специалистами в данной области техники, после изучения чертежей, раскрытия и прилагаемой формулы изобретения.
В формуле изобретения выражение «содержащий» не исключает других элементов или этапов, и форма единственного числа не исключает множественного числа.
Одиночные блоки или устройства могут выполнять функции нескольких компонентов, упомянутых в формуле изобретения. Очевидное обстоятельство, что некоторые признаки перечислены во взаимно различающихся, зависимых пунктах формулы изобретения не означает невозможности использования комбинации упомянутых признаков в подходящем случае.
Процедуры, подобные обеспечению плана терапии или формированию визуального отображения, выполняемым несколькими блоками первой подсистемы, или подобные планированию и/или контролю терапии, выполняемым блоком второй подсистемы, могут выполняться любым другим числом блоков или устройств соответствующей подсистемы. Данные процедуры и/или управление системой для поддержки выполнения интервенционной процедуры в соответствии со способом поддержки выполнения интервенционной процедуры могут быть реализованы в форме средства программного кода компьютерной программы и/или в форме специальной аппаратуры.
Компьютерная программа может храниться/распространяться на подходящем носителе, например, оптическом информационном носителе или твердотельном носителе, поставляемым совместно с другим аппаратным обеспечением или в виде его части, но может также распространяться в других формах, например, по сети Интернет или в других проводных или беспроводных телекоммуникационных системах.
Никакие ссылочные позиции в формуле изобретения нельзя интерпретировать как ограничивающие объем изобретения.
Изобретение относится к системе для поддержки выполнения интервенционной процедуры. Система содержит первую подсистему и вторую подсистему в разных местах, в частности, в разных кабинетах. На первом месте первая подсистема a) формирует первое изображение субъекта в то время, как интервенционное устройство вводят в субъекта, и b) определяет положение интервенционного устройства внутри субъекта. На втором месте вторая подсистема a) формирует второе изображение субъекта с введенным интервенционным устройством и b) планирует и/или контролирует терапию на основании второго изображения и уже определенного положения интервенционного устройства, т.е. от второй подсистемы не требуется начинать совершенно новую процедуру определения положения, что уменьшает объем технических работ. Кроме того, первое и второе изображения формируются разными методами визуализации, что позволяет, например, усовершенствовать ориентирование по изображениям, планирование и/или контроль.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КОНТРОЛЯ ИЗОБРАЖЕНИЙ | 2016 |
|
RU2703688C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БРАХИТЕРАПИИ, ОТЛИЧАЮЩИЕСЯ ОТСЛЕЖИВАНИЕМ ПОСРЕДСТВОМ ВОСПРИЯТИЯ ФОРМЫ | 2010 |
|
RU2551931C2 |
| КАЛИБРОВОЧНОЕ ПРИСПОСОБЛЕНИЕ | 2013 |
|
RU2650037C2 |
| Способ профилактики развития эректильной дисфункции при внутритканевой лучевой терапии рака предстательной железы источником высокой мощности дозы Ir192 | 2021 |
|
RU2765404C1 |
| УЗЕЛ МАГНИТНО-РЕЗОНАНСНОЙ КАТУШКИ ДЛЯ ФИДУЦИАЛЬНЫХ МАРКЕРОВ | 2014 |
|
RU2665343C1 |
| ДОЗА С КОМПЕНСАЦИЕЙ ПЕРЕМЕЩЕНИЯ, ПОЛУЧЕННАЯ ТКАНЬЮ В ПРОЦЕДУРАХ БРАХИТЕРАПИИ С ВЫСОКОЙ МОЩНОСТЬЮ ДОЗЫ | 2013 |
|
RU2665604C2 |
| ЭЛЕКТРОМАГНИТНОЕ ОБНАРУЖЕНИЕ ПОЛОЖЕНИЯ АППЛИКАТОРА ДЛЯ БРАХИТЕРАПИИ С ВЫСОКОЙ МОЩНОСТЬЮ ДОЗЫ | 2008 |
|
RU2493891C2 |
| СПОСОБ ПЛАНИРОВАНИЯ ВЫСОКОДОЗНОЙ ВНУТРИТКАНЕВОЙ ЛУЧЕВОЙ ТЕРАПИИ РАКА ПРЕДСТАТЕЛЬНОЙ ЖЕЛЕЗЫ | 2014 |
|
RU2576875C1 |
| ИНТЕРВЕНЦИОННАЯ МР-ТОМОГРАФИЯ С КОМПЕНСАЦИЕЙ ДВИЖЕНИЯ | 2010 |
|
RU2580189C2 |
| ТЕРАПЕВТИЧЕСКОЕ УСТРОЙСТВО | 2009 |
|
RU2522384C2 |
Группа изобретений относится к системе для поддержки выполнения интервенционной процедуры. Система содержит первую подсистему и вторую подсистему в разных местах, в частности, разных кабинетах. В первом месте первая подсистема a) формирует первое изображение субъекта в то время, когда интервенционное устройство вводят в субъекта, и b) определяет положение интервенционного устройства внутри субъекта. Во втором месте вторая подсистема a) формирует второе изображение субъекта с введенным интервенционным устройством и b) планирует и/или контролирует терапию на основании второго изображения и уже определенного положения интервенционного устройства, т.е. от второй подсистемы не требуется начинать совершенно новую процедуру определения положения, что сокращает объем технических работ. Кроме того, первое и второе изображения формируются разными методами визуализации. Группа изобретений обеспечивает возможность, улучшенного ориентирования по изображениям, планирования и/или контроля. 3 н. и 10 з.п. ф-лы, 7 ил.
1. Система для поддержки выполнения интервенционной процедуры, при этом система содержит:
- первую подсистему (1; 101), содержащую a) первое устройство (40, 42; 140, 142) визуализации для формирования первого изображения субъекта (22) в то время, когда интервенционное устройство (12; 112) вводят в субъекта (22), b) устройство (3) определения положения для определения положения интервенционного устройства (12; 112) внутри субъекта (22) относительно первого изображения, и c) запоминающее устройство (4) для сохранения определенного положения интервенционного устройства (12; 112) внутри субъекта (22) после того, как интервенционное устройство (12; 112) введено в субъекта (22),
- вторую подсистему (2; 102), содержащую a) второе устройство (7, 8) визуализации для формирования второго изображения субъекта (22) с введенным интервенционным устройством (12; 112), причем первое и второе устройства (40, 42; 140, 142; 7, 8) визуализации различаются методами визуализации, и b) устройство (9; 109) планирования и/или контроля для планирования терапии, подлежащей выполнению с использованием интервенционного устройства (12; 112), и/или для контроля терапии, выполняемой с использованием интервенционного устройства (12; 112), на основании сохраненного положения интервенционного устройства (12; 112) и второго изображения, причем первая подсистема (1; 101) и вторая подсистема (2; 102) расположены в разных местах.
2. Система по п. 1, в которой первая подсистема (1; 101) дополнительно содержит:
- блок (43, 143) выдачи плана терапии для выдачи плана терапии, определяющего планируемое положение интервенционного устройства (12; 112),
- блок (44, 144) формирования визуального отображения для формирования визуального отображения, представляющего первое изображение, определенное положение интервенционного устройства (12; 112) и планируемое положение в то время, когда интервенционное устройство (12; 112) вводят в субъекта (22).
3. Система по п. 2, в которой блок (43, 143) выдачи плана терапии выполнен с возможностью выдачи плана терапии, определяющего планируемое положение интервенционного устройства (12; 112) и параметр терапии, определяющий подачу энергии в субъекта (22) с использованием интервенционного устройства (12; 112), для терапии субъекта (22), при этом устройство (9; 109) планирования и/или контроля выполнено с возможностью коррекции параметра терапии выданного плана терапии на основании сохраненного положения интервенционного устройства (12; 112) и второго изображения.
4. Система по п. 2, причем система выполнена с возможностью поддержки выполнения интервенционной процедуры брахитерапии, при этом интервенционное устройство (12) является брахитерапевтическим катетером (12), причем блок (43) выдачи плана терапии выполнен с возможностью выдачи плана терапии таким образом, что он определяет планируемое положение брахитерапевтического катетера (12), положение задержки внутри брахитерапевтического катетера (12) и время задержки для источника излучения.
5. Система по п. 1, в которой первое устройство (40, 42; 140, 142) визуализации является ультразвуковым или рентгенографическим устройством.
6. Система по п. 1, в которой второе устройство (7, 8) визуализации является устройством визуализации методом компьютерной томографии, магнитного резонанса, позитронно-эмиссионной томографии или однофотонной эмиссионной компьютерной томографии.
7. Система по п. 1, в которой устройство (9; 109) планирования и/или контроля выполнено с возможностью определения целевой области внутри субъекта (22) во втором изображении и планирования терапии, подлежащей выполнению с использованием интервенционного устройства (12; 112), на основании сохраненного положения интервенционного устройства (12; 112) и определенной целевой области.
8. Система по п. 7, причем система выполнена с возможностью поддержки выполнения интервенционной процедуры брахитерапии, при этом интервенционное устройство (12; 112) является брахитерапевтическим катетером (12; 112), причем устройство (9; 109) планирования и/или контроля выполнено с возможностью планирования терапии, подлежащей выполнению с использованием интервенционного устройства (12; 112), посредством определения положения задержки и времени задержки на основании сохраненного положения интервенционного устройства (12; 112) и определенной целевой области.
9. Система по п. 1, причем система выполнена с возможностью поддержки выполнения интервенционной термотерапии, при этом интервенционное устройство (12; 112) является тепловыделяющей иглой, причем устройство (9; 109) планирования и/или контроля выполнено с возможностью контроля интервенционной термотерапии на основании сохраненного положения тепловыделяющей иглы и второго изображения.
10. Система по п. 1, причем система выполнена с возможностью поддержки выполнения интервенционной селективной внутренней лучевой терапии, при этом интервенционное устройство (12; 112) является катетером (12; 112) для подачи радиоактивных частиц, причем устройство (9; 109) планирования и/или контроля выполнено с возможностью контроля подачи радиоактивных частиц катетером (12; 112) на основании сохраненного положения катетера (12; 112) и второго изображения.
11. Система по п. 1, в которой устройство планирования и/или контроля выполнено с возможностью планирования терапии, подлежащей выполнению с использованием интервенционного устройства (12; 112), и/или контроля терапии, выполняемой с использованием интервенционного устройства (12; 112), также на основании первого изображения.
12. Способ поддержки выполнения интервенционной процедуры, при этом способ содержит этапы, на которых:
- формируют первое изображение субъекта (22) в то время, когда интервенционное устройство (12; 112) вводят в субъекта (22), посредством первого устройства (40, 42; 140, 142) визуализации первой подсистемы (1; 101) системы по п. 1,
- определяют положение интервенционного устройства (12; 112) внутри субъекта (22) относительно первого изображения посредством устройства (3) определения положения первой подсистемы (1; 101),
- сохраняют определенное положение интервенционного устройства (12; 112) внутри субъекта (22) посредством запоминающего устройства (4) после того, как интервенционное устройство (12; 112) введено в субъекта (22),
- формируют второе изображение субъекта (22) посредством второго устройства (7, 8) визуализации второй подсистемы (2; 102) системы, причем первое и второе устройства (40, 42; 140, 142; 7, 8) визуализации различаются методами визуализации, и
- планируют терапию, подлежащую выполнению с использованием интервенционного устройства (12; 112), и/или контролируют терапию, выполняемую с использованием интервенционного устройства (12; 112), на основании сохраненного положения интервенционного устройства (12; 112) и второго изображения, посредством устройства (9; 109) планирования и/или контроля второй подсистемы (2; 102).
13. Носитель данных для поддержки выполнения интервенционной процедуры, содержащий компьютерную программу для поддержки выполнения интервенционной процедуры, причем компьютерная программа содержит программное кодовое средство для инструктирования системы по п. 1 выполнять способ по п. 12, когда компьютерная программа выполняется в системе.
| СПОСОБ ПОДЗЕМНОГО ВЫЩЕЛАЧИВАНИЯ РУД ЦВЕТНЫХ МЕТАЛЛОВ | 2005 |
|
RU2293844C2 |
| US 2007078327 A1, 05.04.2007 | |||
| US 2003065260 A1, 03.04.2003 | |||
| US 2015190654 A1, 09.07.2015. | |||

