Область техники, к которой относится изобретение
Настоящее изобретение относится к калибровочному приспособлению, способу калибровки и калибровочной компьютерной программе для калибровки системы для введения воздействующего элемента в объект, причем воздействующий элемент выполнен с возможностью воздействия на целевую область внутри объекта. Настоящее изобретение в частности относится к калибровочному приспособлению, способу калибровки и калибровочной компьютерной программе для калибровки системы для брахитерапии,. Настоящее изобретение также относится к приспособлению для определения плана воздействия, способу определения плана воздействия и компьютерной программе для определения плана воздействия для определения плана воздействия для воздействия на целевую область внутри объекта. План воздействия, предпочтительно, представляет собой план лечения для брахитерапевтической процедуры.
Уровень техники изобретения
Во время клинической брахитерапевтической процедуры с высокой мощностью дозы (HDR) катетеры вставляются в целевую область внутри человека, причем через вставленные катетеры источники излучения вводятся в целевую область в соответствии с планом лечения, который определяет времена облучения и местоположения источника для лечения целевой области. План лечения определяют заранее на основании, помимо прочего, трехмерных позиций и форм вставленных катетеров, причем для определения трехмерных позиций и форм катетеров внутри человека пользователь последовательно вводит проводник в катетеры, причем положение конца проводника внутри соответствующего катетера электромагнитно отслеживается. Таким образом, план лечения, в частности положения источника, определяют на основании, помимо прочего, электромагнитно отслеживаемого положения конца проводника. Определение плана лечения на основании положений конца проводника внутри соответствующего катетера, а также доставка лечения на основании, помимо прочего, электромагнитно отслеживаемых положений конца катетера могут быть неточными, что снижает качество брахитерапии.
Сущность изобретения
Задачей настоящего изобретения является создание калибровочного приспособления, способа калибровки и калибровочной компьютерной программы для калибровки системы для введения воздействующего элемента в объект, причем воздействующий элемент выполнен с возможностью воздействия на целевую область внутри объекта, что делает возможным более точное воздействие на целевую область. Настоящее изобретение также относится к приспособлению для определения плана воздействия, способу определения плана воздействия и компьютерной программе для определения плана воздействия, которые делают возможным определение более точного плана воздействия.
В первом аспекте настоящего изобретения представлено калибровочное приспособление для калибровки системы для введения воздействующего элемента в объект, причем воздействующий элемент выполнен с возможностью воздействия на целевую область внутри объекта, и причем данное калибровочное приспособление содержит:
- узел предоставления изображений для предоставления первого изображения, показывающего удлиненное устройство введения, которое выполнено с возможностью вставки в объект для введения воздействующего элемента в объект, и устройство слежения, которое выполнено с возможностью отслеживания устройства введения и вставки в устройство введения настолько далеко, насколько возможно, и второго изображения, показывающего устройство введения и калибровочный элемент, который имеет те же размеры, что и воздействующий элемент, и который выполнен с возможностью вставки в устройство введения настолько далеко, насколько возможно,
- узел идентификации для идентификации конца устройства введения, устройства слежения и калибровочного элемента на первом и втором изображениях,
- узел определения относительного положения в пространстве для определения относительного положения в пространстве устройства слежения и калибровочного элемента из первого и второго изображений, на которых были идентифицированы конец устройства введения, устройство слежения и калибровочный элемент.
Если непосредственно перед тем, как воздействующий элемент был вставлен в устройство введения, устройство слежения вставляют в устройство введения настолько далеко, насколько возможно, и если определено положение устройства слежения в соответствующем наиболее удаленном положении, это определенное наиболее удаленное положение устройства слежения можно использовать вместе с относительным положением в пространстве устройства слежения и калибровочного элемента, которое было определено заранее на этапе калибровки с помощью калибровочного приспособления, для определения плана воздействия и для введения воздействующего элемента в соответствии с определенным планом воздействия. Например, расстояние между положением конца устройства введения и наиболее удаленным положением устройства слежения и, кроме того, расстояние между положением конца устройства введения и наиболее удаленным положением калибровочного элемента, определенное на предшествующем этапе калибровки с помощью калибровочного приспособления, можно использовать для определения расстояния между наиболее удаленным положением устройства слежения и наиболее удаленным возможным положением воздействующего элемента в устройстве введения, причем данное расстояние можно использовать для определения наиболее удаленного возможного положения воздействующего элемента в устройстве введения на основании фактически определенного наиболее удаленного положения устройства слежения в устройстве введения. Данное наиболее удаленное возможное положение воздействующего элемента в устройстве введения можно использовать для более точного определения плана воздействия и для более точного позиционирования воздействующего элемента в соответствии с планом воздействия, что делает возможным улучшенное воздействие на целевую область.
Воздействующий элемент представляет собой, предпочтительно, источник излучения для осуществления брахитерапии. Соответственно, калибровочное приспособление представляет собой, предпочтительно, брахитерапевтическое калибровочное приспособление для калибровки системы для брахитерапии. Кроме того, калибровочный элемент представляет собой, предпочтительно, имитационный источник излучения, который имеет те же размеры, что и источник излучения, используемый для осуществления брахитерапии. Узел предоставления изображений, предпочтительно, выполнен с возможностью предоставления радиографических изображений, т.е. рентгеновских изображений, в качестве первого и второго изображений, и устройство слежения представляет собой, предпочтительно, электромагнитное (EM) устройство слежения или устройство слежения, основанное на волоконно-оптическом определении формы и местоположения (FOSSL).
Узел предоставления изображений может также быть выполнен с возможностью предоставления других типов первого и второго изображений, таких как ультразвуковые изображения, изображения компьютерной томографии и так далее. Объект представляет собой, предпочтительно, живой объект, такой как человек или животное, причем целевая область может представлять собой область, подлежащую лечению. План воздействия поэтому представляет собой, предпочтительно, план лечения для лечения целевой области внутри живого объекта. Целевая область представляет собой, например, предстательную железу или часть предстательной железы человека.
Узел предоставления изображений представляет собой, предпочтительно, узел хранения, в котором первое и второе изображения могут быть сохранены и из которого данные изображения могут быть извлечены для их предоставления. Узел предоставления изображений может также представлять собой принимающий узел для приема изображений посредством проводного или беспроводного соединения для передачи данных от системы генерации изображений, такой как система рентгеновской визуализации, причем узел предоставления изображений выполнен с возможностью предоставления принятых изображений. Узел предоставления изображений может также представлять собой саму систему генерации изображений.
Предпочтительно, в живой объект вставляют несколько устройств введения, для того чтобы вводить в объект несколько воздействующих элементов по различным траекториям. Одно или несколько устройств введения представляют собой, предпочтительно, катетеры или иглы.
Узел идентификации, предпочтительно, выполнен с возможностью автоматической идентификации конца устройства введения, устройства слежения и калибровочного элемента или дает возможность пользователю идентифицировать конец устройства введения, устройство слежения и калибровочный элемент. Для автоматической идентификации данных компонентов можно использовать известные алгоритмы сегментации, которые могут быть основаны, например, на задании порогов.
В варианте осуществления узел определения относительного положения в пространстве выполнен с возможностью определения расстояния между положением конца устройства введения и положением устройства слежения из первого изображения, на котором были идентифицированы конец устройства введения и устройство слежения, расстояния между положением конца устройства введения и положением калибровочного элемента из второго изображения, на котором были идентифицированы конец устройства введения и калибровочный элемент, и расстояния между положением устройства слежения и положением калибровочного элемента на основании определенного расстояния между положением конца устройства введения и положением устройства слежения и расстояния между положением конца устройства введения и положением калибровочного элемента. Это делает возможным точное определение относительного положения в пространстве устройства слежения и калибровочного элемента, в частности конца устройства слежения и калибровочного элемента, относительно простым способом.
Калибровочное приспособление может также содержать узел предоставления ультразвуковых изображений для предоставления ультразвукового изображения конца устройства введения и узел предоставления положения устройства слежения для предоставления положения устройства слежения, когда оно вставлено в устройство введения настолько далеко, насколько возможно, причем узел идентификации выполнен с возможностью идентификации конца устройства введения на ультразвуковом изображении, и причем узел определения относительного положения в пространстве выполнен с возможностью обновления относительного положения в пространстве устройства слежения и калибровочного элемента, в первую очередь смещения между концом устройства введения и устройством слежения, на основании ультразвукового изображения с идентифицированным концом устройства введения и предоставленным положением устройства слежения. Таким образом, после определения относительных положений в пространстве на этапе первоначальной калибровки, например до того, как систему для брахитерапии или части системы для брахитерапии используют в первый раз, на последующем этапе обеспечения качества относительное положение в пространстве устройства слежения и калибровочного элемента, определенное во время первоначальной калибровки, может быть обновлено на основании ультразвуковых изображений, которые, предпочтительно, используют во время фактической брахитерапии. В частности, ультразвуковое изображение с идентифицированным концом устройства введения и предоставленным положением устройства слежения можно использовать вместе с расстоянием между положением конца устройства введения и положением калибровочного элемента, определенным во время первоначальной калибровки, для обновления расстояния между положением устройства слежения и положением калибровочного элемента. Для данного этапа обеспечения качества не нужно устройство визуализации, которое было использовано для осуществления первоначальной калибровки, такое как система рентгеновской визуализации. Процедура обеспечения качества может учитывать механический износ или другие физические изменения используемого оборудования, происходящие со временем, которые могут приводить к изменениям в относительных положениях в пространстве устройства введения, устройства слежения и/или воздействующего элемента. Периодическое проведение данной процедуры обеспечения качества, например, по процедуре в день, в каждые три месяца, в год и так далее, может гарантировать, что качество брахитерапии остается высоким с течением времени.
Узел предоставления ультразвуковых изображений может представлять собой узел хранения, в котором хранится ультразвуковое изображение и из которого данное ультразвуковое изображение может быть извлечено для его предоставления. Узел предоставления ультразвуковых изображений может также представлять собой принимающий узел для приема ультразвукового изображения посредством проводного или беспроводного соединения для передачи данных от устройства генерации ультразвуковых изображений, причем узел предоставления ультразвуковых изображений выполнен с возможностью предоставления принятого ультразвукового изображения. Узел предоставления ультразвуковых изображений может также представлять собой само устройство генерации ультразвуковых изображений. Узел предоставления ультразвуковых изображений, предпочтительно, выполнен с возможностью предоставления трансректального ультразвукового (TRUS) изображения. Использование TRUS изображения делает возможной генерацию ультразвукового изображения, когда ультразвуковой приемопередатчик расположен близко к предстательной железе, так что TRUS изображение особенно предпочтительно, если один или несколько воздействующих элементов следует вводить в предстательную железу человека.
Узел предоставления ультразвуковых изображений может также быть выполнен с возможностью предоставления другого типа ультразвукового изображения, такого как трансабдоминальное, трансуретральное или трансперинеальное ультразвуковое изображение.
Кроме того, узел предоставления положения устройства слежения может представлять собой узел хранения, причем в данном случае узел хранения выполнен с возможностью хранения положения устройства слежения и извлечения сохраненного положения устройства слежения для его предоставления. Кроме того, узел предоставления положения устройства слежения может также представлять собой принимающий узел для приема положения устройства слежения от системы слежения посредством проводного или беспроводного соединения для передачи данных, причем узел предоставления положения устройства слежения может быть выполнен с возможностью предоставления принятого положения. Узел предоставления положения устройства слежения может также представлять собой саму систему слежения.
Кроме того, предпочтительно, чтобы узел предоставления положения устройства слежения был выполнен с возможностью предоставления EM- или FOSSL-отслеживаемого положения устройства слежения. Отслеживание положения устройства слежения с использованием EM-отслеживания или FOSSL-отслеживания делает возможным определение положения устройства слежения с очень высокой точностью, что дополнительно улучшает определение плана воздействия и эффективность процедуры воздействия, такой как брахитерапия, которая основана на положении устройства слежения.
В предпочтительном варианте осуществления узел предоставления положения устройства слежения выполнен с возможностью предоставления положений устройства слежения, когда он перемещается внутри устройства введения в направлении и/или от наиболее удаленного положения в устройстве введения, причем калибровочное приспособление дополнительно содержит узел определения длины для определения длины устройства введения на основании предоставленных положений. Поэтому нет необходимости выводить длину устройства введения из, например, ручного измерения устройства введения вне живого объекта и основанного на ультразвуке измерения устройства введения внутри живого объекта. Длина устройства введения может быть определена более простым способом с помощью той же процедуры, которая уже используется для определения позиции и формы устройства введения, т.е. нет необходимости в проведении двух различных отдельных процедур для определения длины устройства введения и для определения позиции и формы устройства введения внутри живого объекта.
В еще одном аспекте настоящего изобретения представлено калибровочное устройство для калибровки системы для введения воздействующего элемента в объект, причем воздействующий элемент выполнен с возможностью воздействия на целевую область внутри объекта, и причем данное калибровочное устройство содержит проницаемый для излучения блок с непроницаемыми для излучения реперными метками, идентифицируемыми на радиографических изображениях, и каналом для приема устройства введения, который выполнен с возможностью вставки в объект для введения воздействующего элемента в объект. Предпочтительно, чтобы по меньшей мере некоторые из реперных меток были расположены параллельно каналу. Также предпочтительно, чтобы блок содержал несколько каналов, имеющих различные диаметры. Блок может дополнительно содержать фиксирующий узел для фиксации устройства введения внутри канала на месте. Кроме того, блок может содержать следящий датчик для отслеживания положения блока. Следящий датчик представляет собой, например, электромагнитный следящий датчик. В предпочтительном варианте осуществления блок совместим с ультразвуком. Это делает возможным использование калибровочного устройства также для основанной на ультразвуке процедуры обеспечения качества.
В другом аспекте настоящего изобретения представлено приспособление для определения плана воздействия для определения плана воздействия для воздействия на целевую область внутри объекта, причем данное приспособление содержит:
- узел предоставления положения устройства слежения для предоставления положений устройства слежения в устройстве введения, которое вставлено в объект для введения воздействующего элемента в объект, причем положения определяют вдоль длины устройства введения и в наиболее удаленном положении в устройстве введения,
- узел определения позиции и формы устройства введения для определения позиции и формы устройства введения из предоставленных положений устройства слежения,
- узел предоставления позиции и формы целевой области для предоставления позиции и формы целевой области внутри объекта,
- узел определения плана воздействия для определения плана воздействия в зависимости от позиции и формы устройства введения, позиции и формы целевой области, наиболее удаленного положения устройства слежения в устройстве введения и относительного положения в пространстве устройства слежения и калибровочного элемента, определенного с помощью калибровочного приспособления по п. 1.
Поскольку план воздействия определяют на основании, помимо прочего, относительного положения в пространстве устройства слежения и калибровочного элемента, определенного с помощью калибровочного приспособления, план воздействия может быть определен с улучшенной точностью, что делает возможным улучшенное качество последующей процедуры воздействия, такой как последующая брахитерапия, осуществляемая в соответствии с планом воздействия.
Узел предоставления позиции и формы целевой области может быть выполнен с возможностью определения позиции и формы целевой области в зависимости от принятого изображения объекта, такого как принятое ультразвуковое изображение, которое показывает целевую область внутри объекта. Узел предоставления позиции и формы целевой области может быть выполнен с возможностью выполнения алгоритма сегментации для автоматической или полуавтоматической сегментации целевой области для предоставления ее позиции и формы. Однако, узел предоставления позиции и формы целевой области может также представлять собой узел хранения, в котором уже сохранены позиция и форма целевой области, и из которого позиция и форма целевой области могут быть извлечены для их предоставления. Узел предоставления позиции и формы целевой области может также представлять собой принимающий узел для приема позиции и формы целевой области от другого устройства для их определения, причем узел предоставления позиции и формы целевой области может быть выполнен с возможностью предоставления принятых позиции и формы целевой области.
В еще одном аспекте настоящего изобретения представлен способ калибровки для калибровки системы для введения воздействующего элемента в объект, причем воздействующий элемент выполнен с возможностью воздействия на целевую область внутри объекта, и причем данный способ калибровки содержит:
- предоставление первого изображения, показывающего удлиненное устройство введения, которое выполнено с возможностью вставки в живой объект для введения воздействующего элемента внутри живого объекта, и устройство слежения, которое выполнено с возможностью отслеживания устройства введения и которое вставлено в устройство введения настолько далеко, насколько возможно, и второго изображения, показывающего устройство введения и калибровочный элемент, который имеет те же размеры, что и воздействующий элемент, и который вставлен в устройство введения настолько далеко, насколько возможно, с помощью узла предоставления изображений,
- идентификацию конца устройства введения, устройства слежения и калибровочного элемента на первом и втором изображениях с помощью узла идентификации,
- определение относительного положения в пространстве устройства слежения и калибровочного элемента из первого и второго изображений, на которых были идентифицированы устройство введения, устройство слежения и калибровочный элемент, с помощью узла определения относительного положения в пространстве.
В еще одном аспекте настоящего изобретения представлен способ определения плана воздействия для определения плана воздействия для воздействия на целевую область внутри объекта, причем данный способ определения плана воздействия содержит:
- предоставление положений устройства слежения в устройстве введения, которое вставлено в объект для введения воздействующего элемента в объект, с помощью узла предоставления положения устройства слежения, причем данные положения определены вдоль длины устройства введения и в наиболее удаленном положении в устройстве введения,
- определение позиции и формы устройства введения из предоставленных положений устройства слежения с помощью узла определения позиции и формы устройства введения,
- предоставление позиции и формы целевой области внутри объекта с помощью узла предоставления позиции и формы целевой области,
- определение плана воздействия в зависимости от позиции и формы устройства введения, позиции и формы целевой области, наиболее удаленного положения устройства слежения в соответствующем устройстве введения и относительного положения в пространстве устройства слежения и калибровочного элемента, определенного с помощью калибровочного приспособления по п. 1 с помощью узла определения плана воздействия.
В другом аспекте настоящего изобретения представлена калибровочная компьютерная программа для калибровки системы для введения воздействующего элемента в объект, причем воздействующий элемент выполнен с возможностью воздействия на целевую область внутри объекта, и причем данная калибровочная компьютерная программа содержит средства программного кода для того, чтобы вынуждать калибровочное приспособление по п. 1 выполнять этапы способа калибровки по п. 12, когда данная калибровочная компьютерная программа запущена на компьютере, управляющем калибровочным приспособлением.
В еще одном аспекте настоящего изобретения представлена компьютерная программа для определения плана воздействия для определения плана воздействия для воздействия на целевую область внутри объекта, причем данная компьютерная программа для определения плана воздействия содержит средства программного кода для того, чтобы вынуждать приспособление для определения плана воздействия по п. 11 выполнять этапы способа определения плана воздействия по п. 13, когда данная компьютерная программа для определения плана воздействия запущена на компьютере, управляющем приспособлением для определения плана воздействия.
Следует понимать, что калибровочное приспособление по п. 1, приспособление для определения плана воздействия по п. 11, способ калибровки по п. 12, способ определения плана воздействия по п. 13, калибровочная компьютерная программа по п. 14 и компьютерная программа для определения плана воздействия по п. 15 имеют сходные и/или идентичные предпочтительные варианты осуществления, в частности как определено в зависимых пунктах формулы изобретения.
Следует понимать, что предпочтительный вариант осуществления настоящего изобретения может также представлять собой любую комбинацию зависимых пунктов формулы изобретения или вышеописанных вариантов осуществления с соответствующим независимым пунктом формулы изобретения.
Эти и другие аспекты настоящего изобретения будут понятны и объяснены со ссылкой на варианты осуществления, описанные ниже в данном документе.
Краткое описание чертежей
На следующих чертежах:
фиг. 1 показывает схематично и в качестве примера вариант осуществления системы для брахитерапии,
фиг. 2 показывает схематично и в качестве примера помещаемый узел системы для брахитерапии,
фиг. 3 показывает схематично и в качестве примера несколько катетеров системы для брахитерапии, вставленных в предстательную железу человека,
фиг. 4 схематично и в качестве примера иллюстрирует расположение помещаемого узла с TRUS-зондом по отношению к человеку,
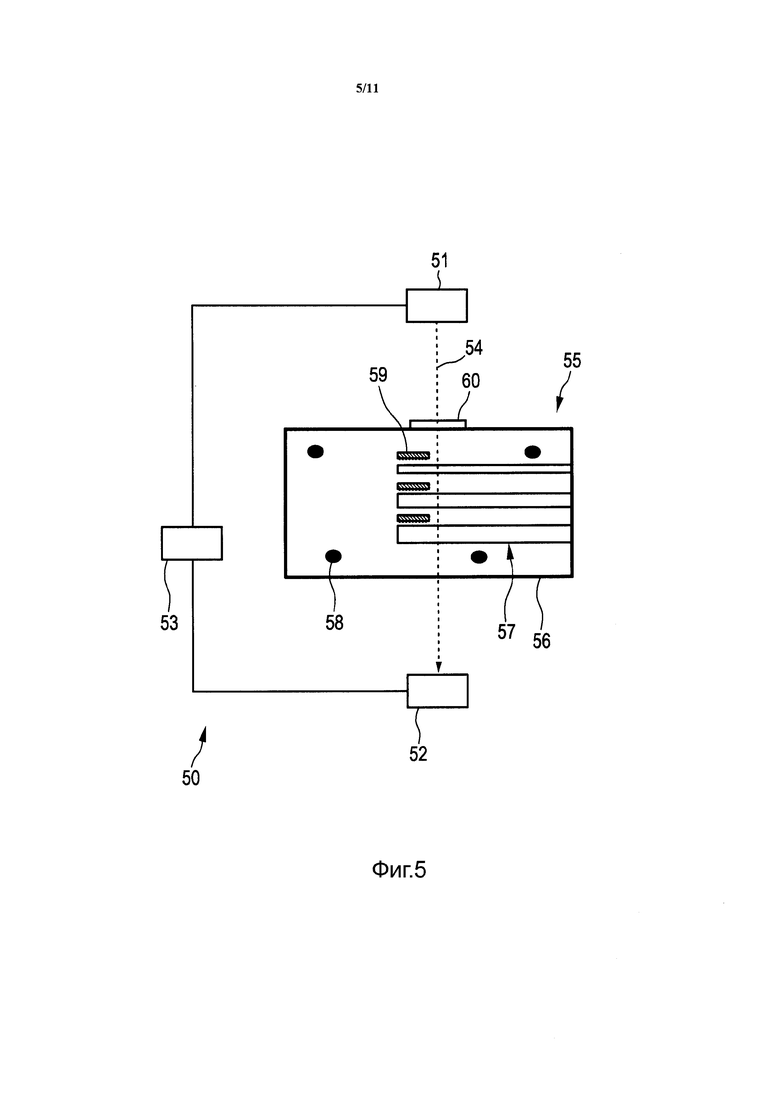
фиг. 5 схематично и в качестве примера показывает калибровочное устройство вместе с системой рентгеновской визуализации,
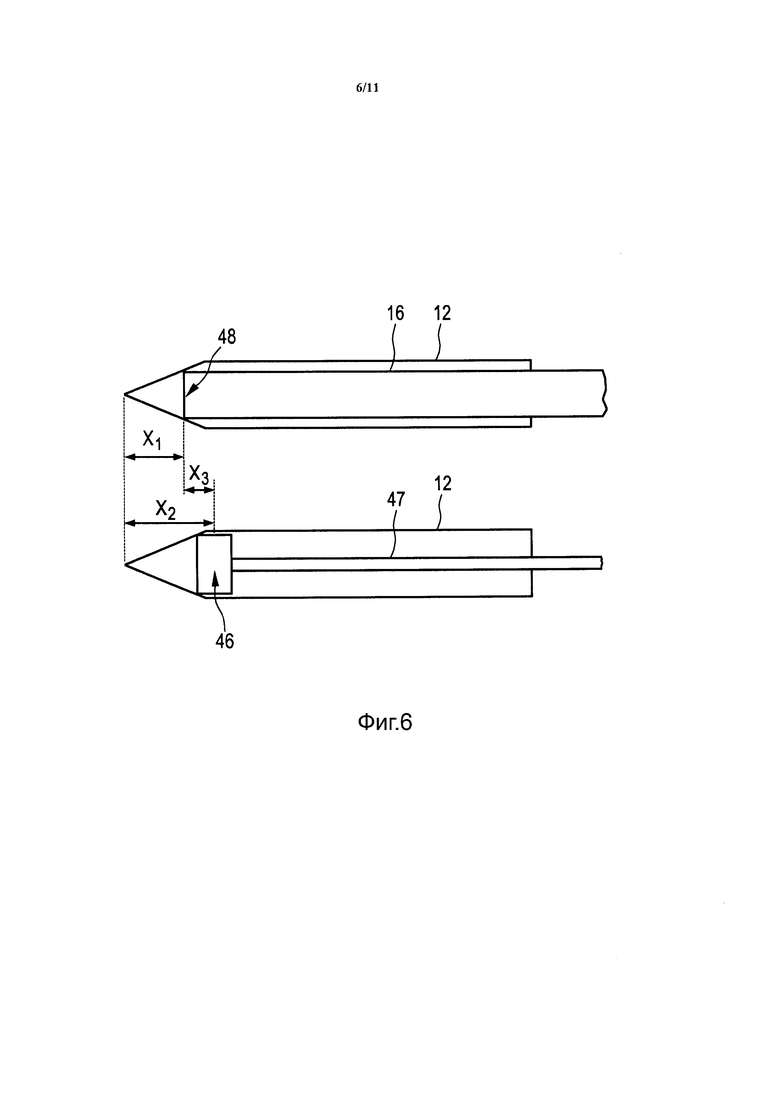
фиг. 6 иллюстрирует несколько расстояний, определенных во время процедуры калибровки,
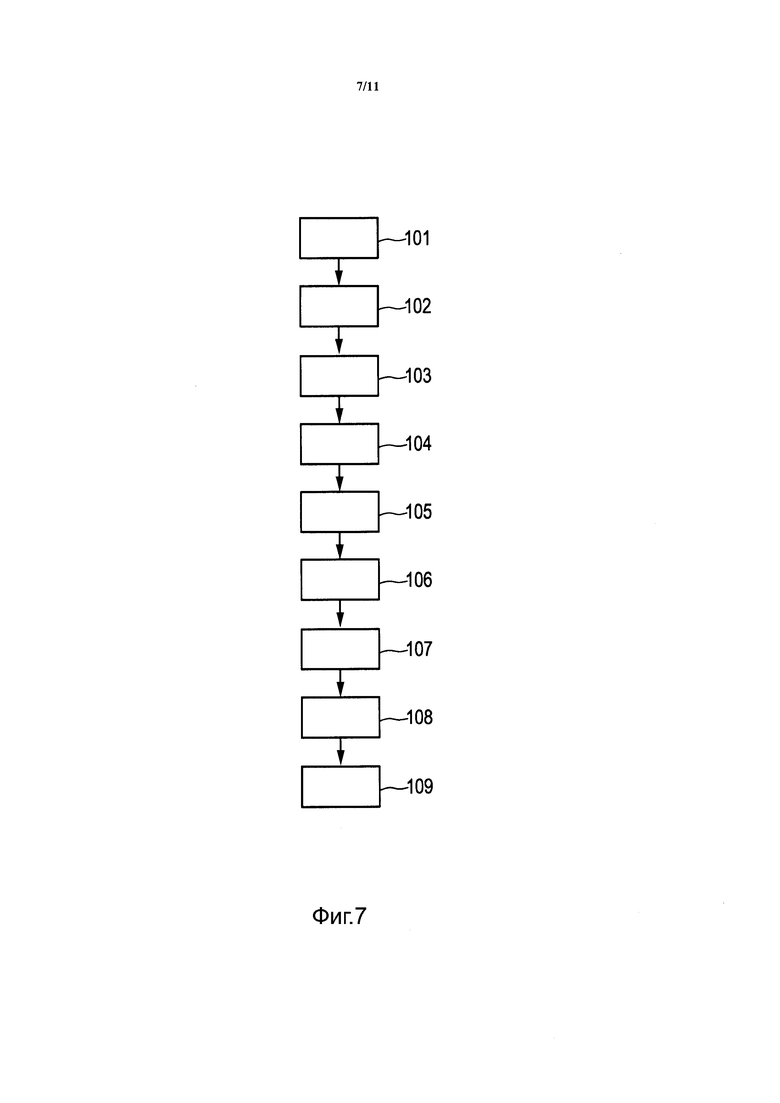
фиг. 7 показывает блок-схему, в качестве примера иллюстрирующую вариант осуществления способа калибровки,
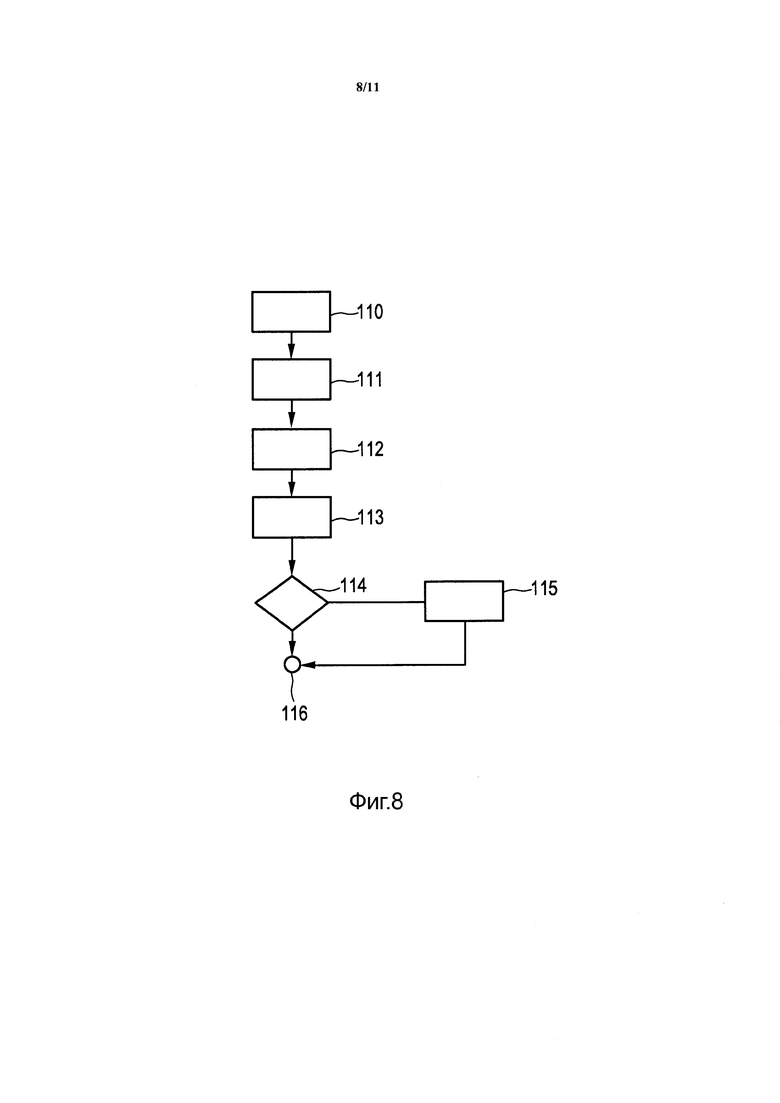
фиг. 8 в качестве примера показывает еще одну блок-схему, иллюстрирующую процедуру обеспечения качества способа калибровки,
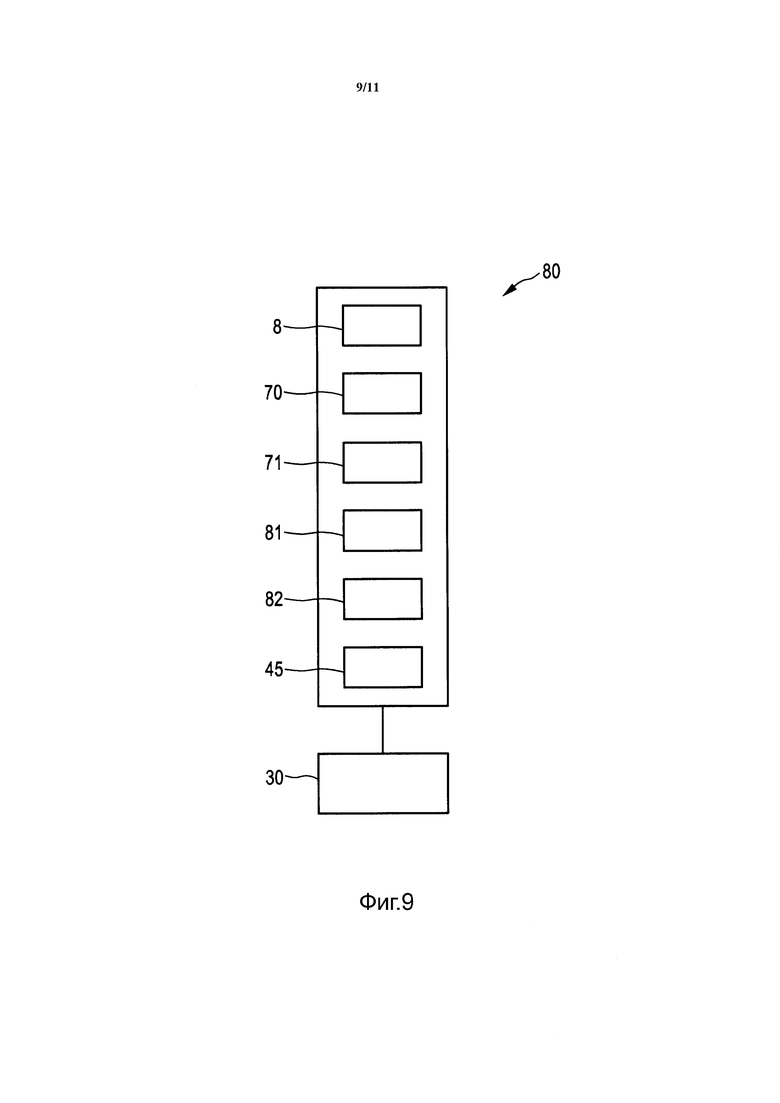
фиг. 9 схематично и в качестве примера показывает вариант осуществления калибровочного приспособления,
фиг. 10 показывает блок-схему, в качестве примера иллюстрирующую вариант осуществления способа определения плана лечения, и
фиг. 11 схематично и в качестве примера показывает вариант осуществления приспособления для определения плана лечения.
Подробное описание вариантов осуществления
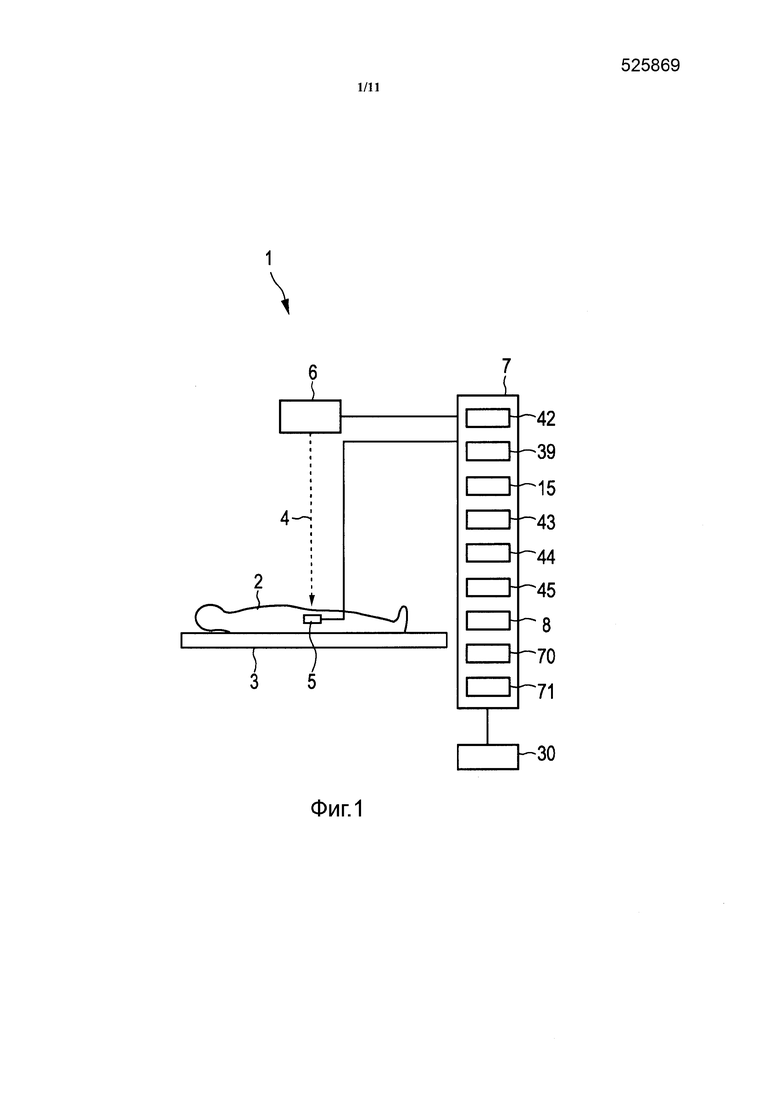
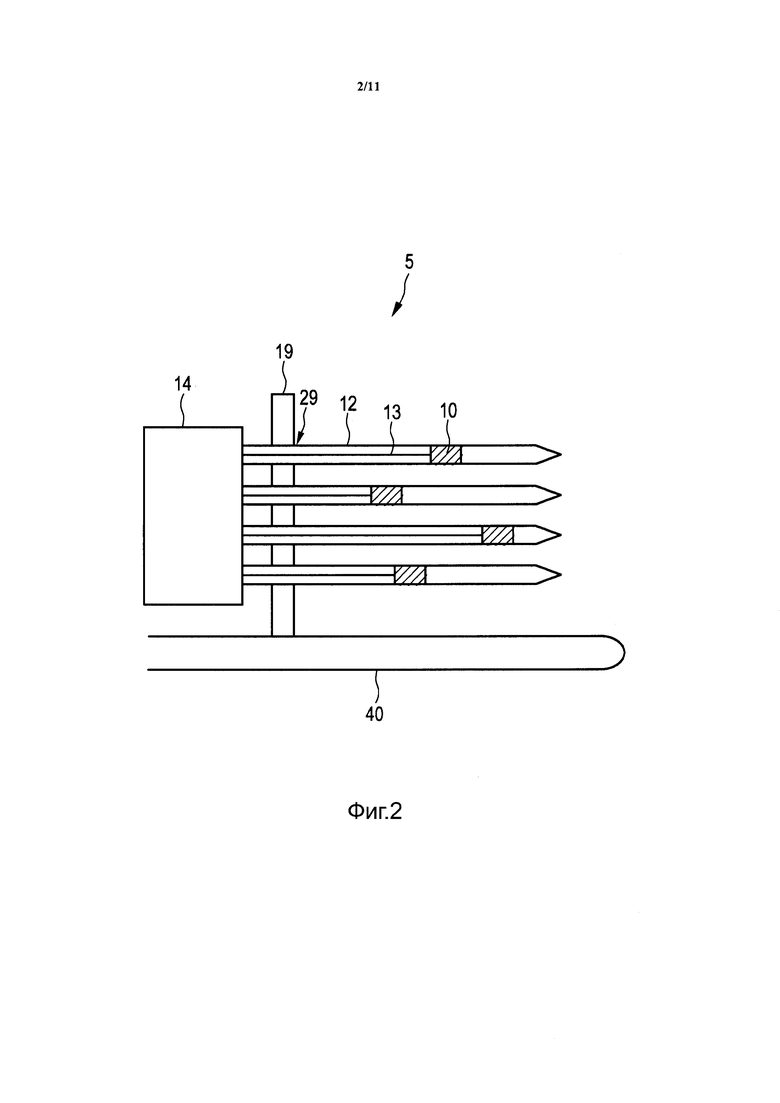
Фиг. 1 схематично и в качестве примера показывает систему для введения воздействующего элемента в объект, причем воздействующий элемент выполнен с возможностью воздействия на целевую область внутри объекта. В данном варианте осуществления система представляет собой систему 1 для брахитерапии для применения брахитерапии к целевой области внутри человека 2, лежащего на столе 3. Система 1 для брахитерапии содержит помещаемый узел 5 для частичного вставления в человека 2 и для помещения воздействующих элементов, представляющих собой, в данном варианте осуществления, источники излучения поблизости от или внутри целевой области для направления излучения, испускаемого источниками излучения, в целевую область. Помещаемый узел 5 в качестве примера и схематично показан более подробно на фиг. 2.
Помещаемый узел 5 содержит несколько устройств введения, представляющих собой, в данном варианте осуществления, катетеры 12 для вставки в человека 2. Помещаемый узел 5 дополнительно содержит несколько навигационных элементов 13, представляющих собой провода, к которым прикреплены источники 10 излучения, причем соответствующий провод 13 может перемещаться внутри соответствующего катетера 12 для помещения соответствующего источника излучения 10 в желаемое положение для помещения. Катетеры 12 с проводами 13 прикреплены к двигательному узлу 14, содержащему несколько двигателей для перемещения проводов 13 в прямом направлении и в обратном направлении для помещения источников излучения 10 в желаемые положения для помещения, которые могут также быть рассмотрены как положения источников. Источники 10 излучения представляют собой, предпочтительно, радиоактивные источники излучения, испускающие радиоактивное излучение, такие как Ir-192. Однако, другие радиоактивные источники также могут быть использованы для осуществления брахитерапии.
Помещаемый узел 5 дополнительно содержит шаблон 19, который можно использовать для вставки катетеров 12 в человека 2 в более однородной конфигурации. Катетеры 12 держатся в отверстиях 29 в шаблоне 19, которые расположены в прямоугольной сетке.
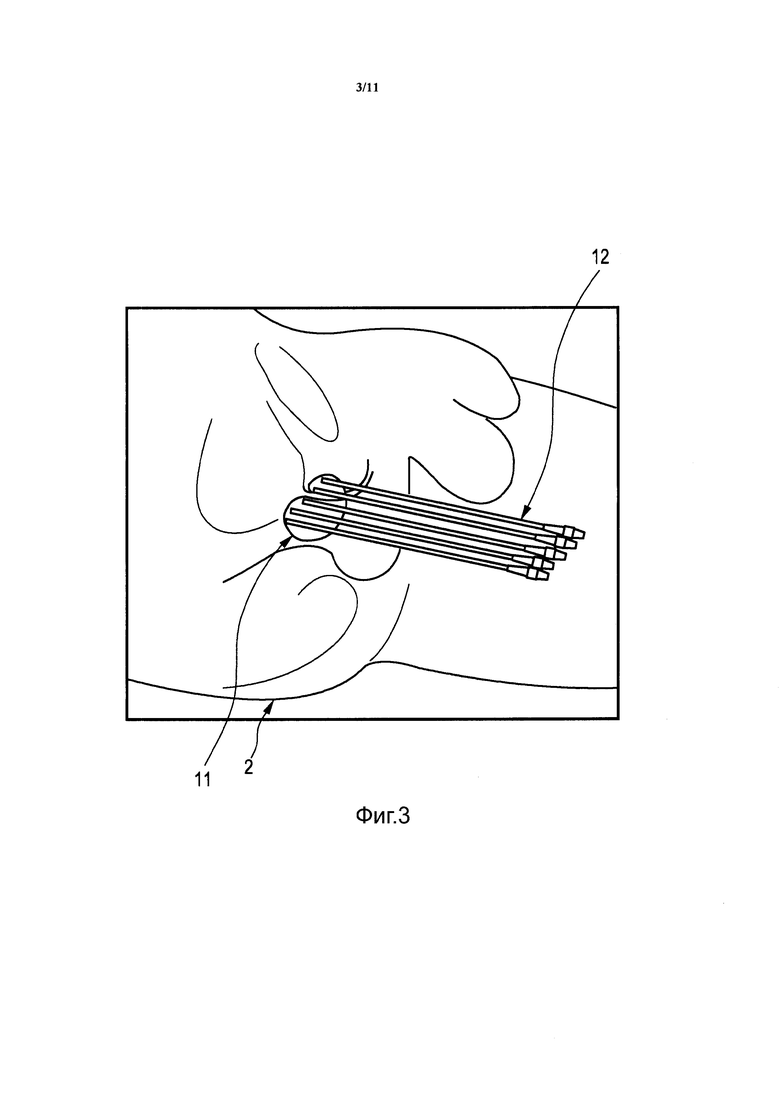
Целевая область представляет собой часть человека 2, такую как орган. В данном варианте осуществления целевая область представляет собой область предстательной железы. Фиг. 3 показывает схематично и в качестве примера возможное расположение катетеров 12 помещаемого узла 5 внутри предстательной железы 11.
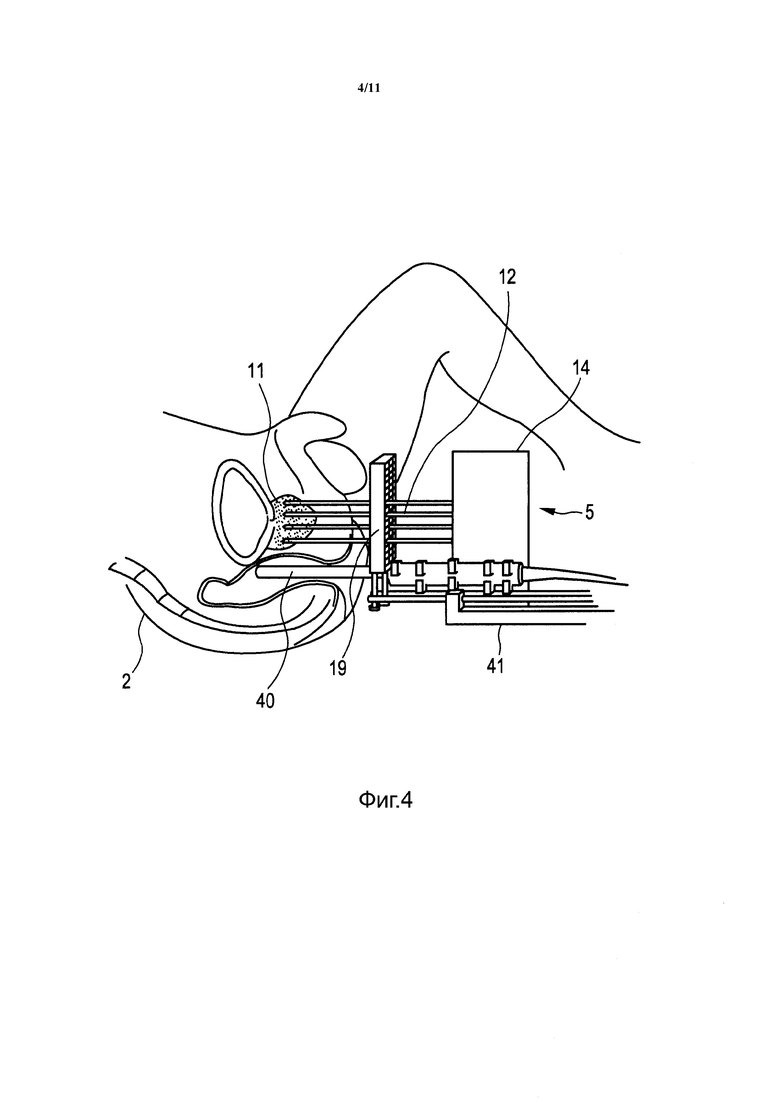
TRUS-зонд 40 прикреплен к помещаемому узлу 5. Расположение помещаемого узла 5 с TRUS-зондом 40 во время брахитерапии схематично и в качестве примера проиллюстрировано на фиг. 4. TRUS-зонд 40 и помещаемый узел 5 удерживаются крепежным элементом 41.
TRUS-зонд 40 соединен с узлом 42 управления ультразвуком, который расположен в устройстве 7 обработки и управления, для генерации двумерных или трехмерных изображений предстательной железы 11, которые могут быть показаны на дисплее 30. Ультразвуковые изображения показывают катетеры 12, целевую область 11, представляющую собой, в данном варианте осуществления, предстательную железу, и окружение целевой области 11. Генерируемые ультразвуковые изображения могут, следовательно, быть использованы для контроля процесса ввода катетеров в действие, т.е. катетеры 12 могут быть вставлены в человека 2 под контролем ультразвука.
Система 1 для брахитерапии дополнительно содержит узел 43 предоставления позиции и формы целевой области для предоставления позиции и формы целевой области, подлежащей лечению, внутри человека 2. В данном варианте осуществления узел 43 предоставления позиции и формы целевой области выполнен с возможностью определения позиции и формы целевой области 11 на основании ультразвукового изображения, генерируемого TRUS-зондом 40 и узлом 42 управления ультразвуком. В частности, узел 43 предоставления позиции и формы целевой области может быть выполнен с возможностью выделения целевой области 11 с помощью применения к ультразвуковому изображению, например, алгоритма сегментации для полностью автоматического или полуавтоматического выделения целевой области 11 на ультразвуковом изображении. Узел 43 предоставления позиции и формы целевой области может также содержать графический пользовательский интерфейс, для того чтобы позволять пользователю, который может быть радиологом, вручную выделять целевую область 11, для того чтобы определить ее. Предоставленные позиция и форма целевой области могут также быть показаны на дисплее 30.
Система 1 для брахитерапии дополнительно содержит узел определения плана воздействия, представляющий собой, в данном варианте осуществления, узел 39 определения плана лечения для определения плана лечения, определяющего положения для помещения, в которые следует помещать источники 10 излучения, и времена помещения, определяющие, когда и на сколько соответствующий источник 10 излучения должен быть помещен в соответствующее положение для помещения в зависимости от позиций и форм катетеров 12, позиции и формы целевой области 11 и относительного положения в пространстве устройства слежения и калибровочного элемента системы 1 для брахитерапии, которое определяют с помощью калибровочного приспособления, как будет описано более подробно ниже.
Система 1 для брахитерапии дополнительно содержит узел 15 управления помещением для управления помещаемым узлом 5 в зависимости от определенного плана лечения. Альтернативно, помещаемый узел 5 может быть использован вручную в соответствии с определенным планом лечения, причем пользователь может перемещать источники 10 излучения с помощью проводов 13 внутри катетеров 12 в соответствии с планом лечения.
До введения источников 10 излучения в катетеры 12 определяют трехмерные позиции и формы катетеров 12 внутри человека 2, т.е. определяют трехмерное пространственное прохождение каждого катетера 12 внутри человека 2. Для данной процедуры определения система 1 для брахитерапии дополнительно содержит устройство 16 слежения для последовательного введения в катетеры 12 и для перемещения в различные местоположения внутри соответствующего катетера 12, причем узел 6 предоставления положения устройства слежения предоставляет положения устройства 16 слежения в различных местоположениях внутри соответствующего катетера 12. Положения определяют вдоль длины соответствующего катетера 12 и в наиболее удаленном положении внутри соответствующего катетера 12. Наиболее удаленное положение внутри соответствующего катетера 12 соответствует положению внутри соответствующего катетера 12, в котором устройство 16 слежения вставлено в соответствующий катетер 12 настолько далеко, насколько возможно. Система 1 для брахитерапии дополнительно содержит узел 44 определения позиции и формы устройства введения для определения позиции и формы катетеров 12 из отслеживаемых положений устройства 16 слежения.
Система для брахитерапии также содержит узел 45 определения длины для определения длины соответствующего катетера 12 на основании отслеживаемых положений устройства 16 слежения. В частности, когда устройство 16 слежения вытягивают из соответствующего катетера 12, положения устройства 16 слежения могут быть определены и предоставлены на узел 45 определения длины для автоматического определения длины соответствующего катетера 12 внутри человека 2, т.е. дистально относительно сетки 19, и длины соответствующего катетера 12 вне человека 2, т.е. проксимально относительно сетки 19. Для определения конца соответствующего катетера 12 вне человека 2 узлом 45 определения длины может быть использована волнистость данных об отслеживаемом положении, поскольку волнистость данных о положении резко возрастает при выходе конца устройства 16 слежения с электромагнитным чувствительным элементом из соответствующего катетера 12. Альтернативно, узел 45 определения длины может определять только длину соответствующего катетера 12 внутри человека 2, т.е. дистально относительно сетки 19, причем длина катетера 12 вне человека 2 может быть измерена с помощью других обычных средств.
Для определения положения сетки 19 в координатной системе, определяемой системой слежения, конец устройства 16 слежения может быть расположен на сетке 19, тогда как положение конца устройства 16 слежения определяют с помощью системы слежения. После данной процедуры известно, какие из положений конца устройства 16 слежения являются дистальными относительно сетки 19, и какие из положений конца устройства 16 слежения являются проксимальными относительно сетки 19.
Длину, определенную с помощью узла 45 определения длины, можно сравнить с измеренной вручную общей фактической длиной катетера, для того чтобы предоставить меру качества системы слежения. Если разница между измеренной вручную общей длиной катетера и общей длиной катетера, определенной с помощью узла 45 определения длины, больше, чем заранее определенный порог, отслеживание положения, предоставляемое устройством 16 слежения, должно быть улучшено.
В данном варианте осуществления узел 6 предоставления положения устройства слежения представляет собой узел EM-отслеживания, который взаимодействует с электромагнитным чувствительным элементом, расположенным на конце устройства 16 слежения, которое может быть образовано проводником и электромагнитным чувствительным элементом, расположенным на конце проводника. В других вариантах осуществления узел предоставления положения устройства слежения может также быть выполнен с возможностью отслеживания положений устройства 16 слежения с использованием другой технологии отслеживания, такой как FOSSL.
Система 1 для брахитерапии дополнительно содержит узел 8 предоставления изображений для предоставления первого изображения, показывающего катетер 12 и устройство 16 слежения, которое вставлено в катетер 12 настолько далеко, насколько возможно, и второго изображения, показывающего катетер 12 и калибровочный элемент, представляющий собой, в данном варианте осуществления, имитационный источник излучения 46, который имеет те же размеры, что и источник 10 излучения, и который вставлен в катетер 12 настолько далеко, насколько возможно. Первое и второе изображения представляют собой, предпочтительно, но без ограничения, радиографические рентгеновские изображения, которые были сгенерированы во время процедуры первоначальной калибровки, которая была выполнена при вводе системы 1 для брахитерапии в эксплуатацию, до того как система для брахитерапии была использована в первый раз. В данном варианте осуществления узел 8 предоставления изображений представляет собой узел хранения, в котором уже сохранены данные изображения, и из которого данные изображения могут быть извлечены для их предоставления. Для генерации данных изображений, предпочтительно, используется вариант осуществления калибровочного устройства, как схематично и в качестве примера показано на фиг. 5.
Фиг. 5 схематично и в качестве примера показывает вариант осуществления калибровочного устройства 55, содержащего проницаемый для излучения блок 56 с непроницаемыми для излучения реперными метками, идентифицируемыми на радиографических изображениях, и каналами 57 для приема соответствующего катетера 12. Каналы 57 имеют различные диаметры, для того чтобы предоставлять возможность для вмещения катетеров, имеющих различные диаметры. Реперные метки могут быть автоматически детектированы на радиографических изображениях. Блок 56 содержит первый тип реперных меток 58, являющихся, предпочтительно, по существу округлыми, в частности сферическими, и второй тип реперных меток 59, представляющих собой удлиненные элементы, расположенные параллельно каналам 57. Второй тип непроницаемых для излучения реперных меток 59 имеет известную длину параллельно каналам 57 для катетеров, для того чтобы устанавливать связь расстояний, измеренных в пространстве изображения, с расстояниями в реальном физическом пространстве.
В данном варианте осуществления блок 56 дополнительно содержит EM следящий датчик 60, который может быть использован вместе с EM системой слежения. В другом варианте осуществления может быть использован другой тип следящего датчика, который может быть основан на другой технологии отслеживания, такой как FOSSL следящий датчик, для пространственного отслеживания позиции блока 56.
Блок 56 калибровочного устройства 55 может, в необязательном порядке, содержать фиксирующий узел для фиксации соответствующего катетера внутри соответствующего канала 57 на месте. Например, для удержания вставленных катетеров на месте может быть предусмотрен зажимной механизм.
Для калибровки системы для брахитерапии катетер 12 вставляют в один из каналов 57 блока 56, причем в соответствующий катетер, который вставлен в соответствующий канал, вставляют устройство слежения или имитационный источник излучения настолько далеко, насколько возможно, как схематично и в качестве примера показано на фиг. 6.
Если снова обратиться к фиг. 5, для генерации первого и второго изображений используют систему 50 рентгеновской визуализации. Система 50 рентгеновской визуализации содержит рентгеновский источник 51 для испускания рентгеновского излучения по существу в направлении, указанном стрелкой 54, и рентгеновский детектор 52 для детектирования рентгеновского излучения после прохождения сквозь калибровочное устройство 55. Сигналы, указывающие на детектированное рентгеновское излучение, передаются на рентгеновский узел 53 управления, который выполнен с возможностью генерации рентгеновского изображения на основании предоставленных сигналов. Рентгеновский узел 53 управления также управляет испусканием и детектированием рентгеновского излучения. В частности, первое рентгеновское изображение генерируется после того, как в канал 57 калибровочного устройства 55 вставляют катетер 12 с устройством 16 слежения, как показано в верхней части фиг. 6, а второе рентгеновское изображение генерируется после того, как в канал 57 брахитерапевтического устройства 55 вставляют катетер 12 с имитационным источником излучения 46, как показано в нижней части фиг. 6. Имитационный источник излучения 46 перемещают в наиболее удаленное положение внутри катетера 12 с использованием навигационного элемента 47 представляющего собой, предпочтительно, проводник.
EM следящий датчик 60, предпочтительно, расположен так, что он появляется на рентгеновском изображении, генерируемом системой 50 рентгеновской визуализации, для того чтобы связать координатную систему системы 50 рентгеновской визуализации и EM системы слежения друг с другом. После того как эти две координатные системы связаны друг с другом, пространственные взаимоотношения между EM следящим датчиком 60 и каналами 57 могут быть определены из рентгеновского изображения, и эти относительные положения в пространстве можно сравнивать с последующими относительными положениями в пространстве EM следящего датчика 60 и катетера, после того как его вставляют в канал 57, определенными с помощью EM системы слежения, для того чтобы получать обеспечение дополнительного качества EM системы слежения в отношении ее пригодности к использованию для оценки позиции, формы и положения конца катетера. Данное сравнение можно использовать для проверки точности EM показаний, выдаваемых EM системой слежения во время дополнительной TRUS-EM процедуры обеспечения качества, которая будет описана ниже.
Система 1 для брахитерапии дополнительно содержит узел 70 идентификации для идентификации конца катетера 12, конца 48 устройства 16 слежения и имитационного источника излучения 46 на первом и втором изображениях. Система 1 для брахитерапии также содержит узел 71 определения относительного положения в пространстве для определения относительных положений в пространстве положений конца катетера 12, конца 48 устройства 16 слежения и имитационного источника излучения 46 из первого и второго изображений, на которых были идентифицированы катетер 12, конец 48 устройства 16 слежения и имитационный источник излучения 46. Узел 70 идентификации может быть выполнен с возможностью автоматической идентификации конца катетера 12, конца 48 устройства 16 слежения и имитационного источника излучения 46 или дает возможность пользователю идентифицировать данные элементы на изображениях. Для автоматического детектирования данных элементов можно использовать известные методы сегментации, которые могут быть основаны на задании порогов.
Узел 71 определения относительного положения в пространстве выполнен с возможностью определения i) расстояния X1 между положением конца катетера 12 и положением конца 48 устройства 16 слежения, ii) расстояния X2 между положением конца катетера 12 и положением имитационного источника излучения 46 и iii) расстояния X3 между положением конца 48 устройства 16 слежения и положением имитационного источника излучения 46. Расстояние X3 определяют, вычитая другие расстояния X2 и X1 друг из друга.
Узел идентификации и узел определения относительного положения в пространстве могут быть реализованы в виде компонентов программного обеспечения, выполняемых на рабочей станции для осуществления обработки изображения и вычислительных операций. Таким образом, может быть обеспечено программное обеспечение, которое делает возможным импорт первого и второго радиографических изображений, показывающих катетер 12, вставленный в канал 57 блока 56, или с устройством 16 слежения, или с имитационным источником излучения 46, причем концы катетера, конец устройства слежения и имитационный источник излучения могут быть вручную или автоматически идентифицированы на первом и втором изображениях, и причем различия в положениях могут быть вычислены, в частности может быть вычислено расстояние X3. По меньшей мере данное относительное положение в пространстве X3 затем передается в узел 39 определения плана лечения для предоставления узлу 39 определения плана лечения возможности определения плана лечения в зависимости - помимо прочего - от данного относительного положения в пространстве.
После первоначальной калибровки, которую выполняют до того, как система 1 для брахитерапии или части системы 1 для брахитерапии, такие как катетеры 12, устройство 16 слежения и/или источник 10 излучения, используются в первый раз, и после того, как калибровочная система была использована несколько раз, первоначально определенные относительные положения в пространстве могут больше не соответствовать реальным относительным положениям в пространстве различных компонентов системы для брахитерапии. Например, после того как система 1 для брахитерапии была использована несколько раз, первоначально определенное расстояние X3 может больше не соответствовать фактическому расстоянию между наиболее удаленным положением конца устройства 16 слежения внутри соответствующего катетера 12 и наиболее удаленным положением источника 10 излучения внутри соответствующего катетера 12. Данное изменение относительных положений в пространстве с течением времени может быть вызвано, например, механическим износом или другими физическими изменениями, происходящими с течением времени, причем данные изменения могут приводить к ошибкам взаимодействия между навигационным, планирующим и доставляющим компонентами системы для брахитерапии.
По этой причине система для брахитерапии выполнена с возможностью обеспечения процедуры обеспечения качества, которая может выполняться периодически. Например, процедура обеспечения качества может выполняться каждые три месяца или каждый год. В частности, узел 40, 42 предоставления ультразвуковых изображений, т.е. в данном варианте осуществления TRUS-зонд, и узел управления ультразвуком могут быть выполнены с возможностью предоставления ультразвукового изображения конца катетера 12, когда устройство 16 слежения вставлено в катетер 12 настолько далеко, насколько возможно. В данной ситуации узел 70 идентификации может идентифицировать конец катетера 12 на ультразвуковом изображении, и узел 6 предоставления положения устройства слежения может определять наиболее удаленное положение конца устройства 16 слежения внутри катетера 12. На основании этих двух положений узел 71 определения относительного положения в пространстве может обновлять расстояние X1, которое в свою очередь может быть использовано для перерасчета расстояния X3, причем в данном примере предполагается, что расстояние X2 не изменяется с течением времени. Обновленные относительные положения в пространстве, в частности скорректированное расстояние X3, могут быть переданы в узел 39 определения плана лечения для предоставления узлу 39 определения плана лечения возможности определения плана лечения для следующей брахитерапии в зависимости от - помимо прочего - обновленного расстояния X3.
Для выполнения данной процедуры обеспечения качества может быть использовано калибровочное устройство 55, описанное выше со ссылкой на фиг. 5, причем в данном случае калибровочное устройство 55 выполнено с возможностью совмещения с TRUS, т.е. состав проницаемого для излучения блока 56, предпочтительно, имитирует акустические свойства ткани. Альтернативно, для процедуры обеспечения качества может быть использован коммерчески доступный ультразвуковой фантом, который имеет акустические свойства, близкие к акустическим свойствам ткани.
Кроме того, процедура обеспечения качества может также быть выполнена после того, как катетер вставлен в человека 2, с использованием устройства 16 слежения и TRUS-зонда 40, т.е. процедура обеспечения качества может также быть выполнена интрапроцедурально на человеке.
Узел 39 определения плана лечения выполнен с возможностью определения плана лечения в зависимости от позиций и форм катетеров 12, после того как они вставлены в человека 2, в зависимости от определенных позиции и формы целевой области 11, от фактически определенного наиболее удаленного положения конца устройства 16 слежения внутри соответствующего катетера 12 и в зависимости от расстояния X3, определенного на этапе первоначальной калибровки, причем данное расстояние X3 может быть обновлено в последующей процедуре обеспечения качества. Для планирования различных положений для помещения и соответствующих времен помещения можно использовать известные методы планирования, такие как метод планирования, раскрытый в статье "Optimization of HDR brachytherapy dose distributions using linear programming with penalty costs", Ron Alterovitz et al, Medical Physics, том 33, номер 11, страницы 4012-4019, ноябрь 2006 г., который настоящим включен посредством ссылки. Методы планирования, в частности, используют расстояние X3 для определения первого положения помещения источника излучения, которое, предпочтительно, используется в качестве начала отсчета в координатной системе помещаемого узла 5, который можно рассматривать как узел подачи источника.
Ниже в качестве примера будет описан способ калибровки для калибровки системы 1 для брахитерапии со ссылкой на блок-схему, показанную на фиг. 7.
На этапе 101 катетер 12 вводят в канал 57 калибровочного устройства 55, причем на этапе 102 устройство 16 слежения вставляют в катетер 12 настолько далеко, насколько возможно. В частности, устройство 16 слежения может содержать электромагнитный чувствительный элемент на конце проводника устройства слежения, причем проводник с электромагнитным чувствительным элементом полностью вставлен в катетер 12 и удерживается на месте. На этапе 103 первое изображение катетера 12 с устройством 16 слежения генерируют с использованием системы 50 рентгеновской визуализации. В частности, получают первое рентгеновское изображение, которое показывает катетер 12, содержащий проводник с электромагнитным чувствительным элементом, образующий устройство слежения. На этапе 104 конец катетера 12 и конец устройства 16 слежения идентифицируют на первом изображении с помощью узла 70 идентификации, и узел 71 определения относительного положения в пространстве определяет расстояние X1 между концом устройства 16 слежения и концом катетера 12 на основании соответствующих элементов, идентифицированных на первом изображении. Таким образом, например, вычисляется расстояние X1 между концом проводника, на котором может присутствовать электромагнитный чувствительный элемент, и концом катетера. На этапе 105 устройство 16 слежения удаляют из катетера 12, и на этапе 106 имитационный источник излучения 46 с навигационным элементом 47 вставляют в катетер 12 настолько далеко, насколько позволяет геометрия оборудования. Имитационный источник излучения 46 имеет размеры, которые идентичны размерам фактического источника излучения, который будет использоваться в брахитерапии. Затем на этапе 107 второе рентгеновское изображение катетера 12 генерируют с использованием системы 50 рентгеновской визуализации, причем на этапе 108 конец катетера 12 и наиболее удаленное положение имитационного источника излучения 46 внутри катетера 12 идентифицируются на втором рентгеновском изображении и используются узлом 71 определения относительного положения в пространстве для определения расстояния X2 между центром имитационного источника излучения 46 и концом катетера 12. На этапе 109 расстояние X3 между концом устройства 16 слежения, в частности концом 48 проводника 16, и имитационным источником излучения 46, в частности центром имитационного источника излучения 46, вычисляют из расстояний X1 и X2.
Хотя в варианте осуществления способа калибровки, описанном выше со ссылкой на фиг. 7, показана определенная последовательность этапов, последовательность этапов может также быть другой. Например, сначала могут быть сгенерированы первое и второе изображения, которые показывают конец катетера с устройством слежения и конец катетера с имитационным источником излучения соответственно, причем тогда на обоих изображениях соответствующие элементы можно идентифицировать и использовать для определения расстояний X1 и X2 и, наконец, X3. Таким образом, например, этапы 102, 103 и 105-107 могут быть выполнены до этапов 104, 108 и 109.
Этапы 101-109 могут быть выполнены для первоначальной калибровки системы 1 для брахитерапии, до того как система 1 для брахитерапии или части системы 1 для брахитерапии используют в первый раз. Способ калибровки может содержать дополнительные этапы, которые выполняются позже, после того как систему 1 для брахитерапии используют несколько раз, для осуществления процедуры обеспечения качества. Предпочтительные соответствующие этапы способа калибровки, которые могут быть выполнены для осуществления соответствующей процедуры обеспечения качества, будут описаны ниже со ссылкой на блок-схему, показанную на фиг. 8.
На этапе 110 генерируют ультразвуковое изображение с использованием TRUS-зонда 40 и узла 42 управления ультразвуком, после того как устройство 16 слежения введено в соответствующий катетер 12. На этапе 111 конец соответствующего катетера 12 выделяют на ультразвуковом изображении, предоставленном TRUS-зондом 40 и узлом 42 управления ультразвуком. Данное выделение может быть осуществлено с помощью узла 70 идентификации. На этапе 112 получают наиболее удаленное положение конца устройства 16 слежения, т.е. в данном варианте осуществления EM зарегистрированное положение конца соответствующего катетера, от узла 6 предоставления положения устройства слежения. Если присутствует несколько катетеров 12, эти положения определяют для каждого катетера, причем, если присутствует только одно устройство 16 слежения, устройство 16 слежения может быть последовательно вставлено в различные катетеры 12, для того чтобы определить наиболее удаленные положения конца устройства 16 слежения в различных катетерах 12. На этапе 113 для каждого катетера 12 положения, определенные на этапах 111 и 112, согласуют, для того чтобы получить оценку X'1 для расстояния между концом соответствующего катетера и наиболее удаленным положением устройства слежения внутри соответствующего катетера. Данное получение оценки X'1 может быть выполнено с помощью узла 71 определения относительного положения в пространстве. На этапе 114 определяют, отличается ли оценка X'1 больше чем на заранее определенный порог от расстояния X1, вычисленного на вышеуказанном этапе 104, причем, если отличие больше, чем порог, способ продолжается с этапа 115. Иначе способ заканчивается на этапе 116. На этапе 115 оценку X'1 используют вместе с расстоянием X2, определенным на этапе 108, для определения обновленного расстояния X3.
Для осуществления данной процедуры обеспечения качества можно использовать фантом, который совместим с TRUS и который совместим с используемой технологией отслеживания, в частности с EM-отслеживанием. Также для процедуры обеспечения качества можно использовать калибровочное устройство 55, описанное выше со ссылкой на фиг. 5, если калибровочное устройство 55 совместимо с TRUS и совместимо с соответствующей технологией отслеживания. Кроме того, процедуру обеспечения качества можно также осуществлять после того, как катетеры вставлены в человека 2, т.е. процедура обеспечения качества может быть осуществлена интрапроцедурально.
Этапы, описанные выше со ссылкой на фиг. 8, могут также быть выполнены в другой последовательности. Например, этап 112 может быть выполнен до этапов 110 и 111.
Узлы, необходимые для осуществления способа калибровки, описанного выше со ссылкой на фиг. 7 и 8, могут быть интегрированы в систему 1 для брахитерапии, как показано на фиг. 1, или они могут образовывать отдельное приспособление, которое соединено с системой для брахитерапии для передачи определенных относительных положений в пространстве на систему для брахитерапии. Соответствующее калибровочное приспособление 80 схематично и в качестве примера показано на фиг. 9.
Калибровочное приспособление 80 содержит узел 8 предоставления изображений для предоставления первого и второго изображений, показывающих соответствующий конец катетера с соответствующим концом устройства слежения и соответствующий конец катетера с имитационным источником излучения соответственно. В данном варианте осуществления узел 8 предоставления изображений представляет собой принимающий узел для приема первого и второго изображений от системы генерации изображений, такой как система 50 рентгеновской визуализации, причем узел 8 предоставления изображений выполнен с возможностью предоставления принятых первого и второго изображений.
Калибровочное приспособление 80 дополнительно содержит узел 70 идентификации, узел 71 определения относительного положения в пространстве и узел 45 определения длины, которые аналогичны соответствующим узлам, описанным выше со ссылкой на фиг. 1. Кроме того, калибровочное приспособление 80 содержит узел 81 предоставления ультразвуковых изображений и узел 82 предоставления положения устройства слежения. Оба узла представляют собой принимающие узлы для приема соответствующей информации, т.е. ультразвукового изображения и наиболее удаленного положения устройства слежения, причем узел 81 предоставления ультразвуковых изображений выполнен с возможностью предоставления принятого ультразвукового изображения, и причем узел 82 предоставления положения устройства слежения выполнен с возможностью предоставления принятого наиболее удаленного положения устройства слежения. Узел 81 предоставления ультразвуковых изображений выполнен с возможностью предоставления ультразвукового изображения, используемого для осуществления вышеописанной процедуры обеспечения качества.
Кроме того, калибровочное приспособление 80 может содержать дисплей 30. Дисплей 30 может показывать, например, изображения, положения и расстояния.
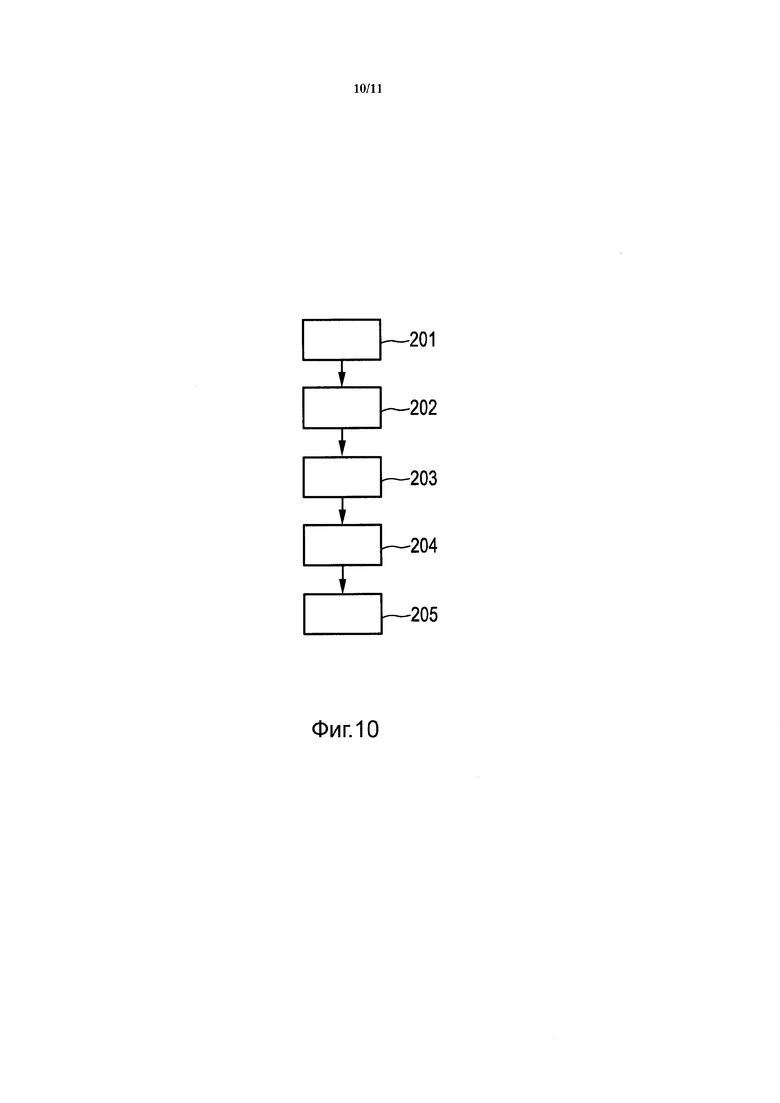
Ниже в качестве примера будет описан вариант осуществления способа определения плана лечения со ссылкой на блок-схему, показанную на фиг. 10.
На этапе 201 генерируют исходное TRUS-изображение с помощью TRUS-зонда 40 и узла 42 управления ультразвуком, причем генерируемое изображение показывает целевую область 11 внутри человека 2. Кроме того, рядом с человеком 2 помещают шаблон 19, так что катетеры 12 можно вводить через отверстия 29 в шаблоне 19 в целевую область 11 человека 2 под ультразвуковым контролем. На этапе 202 в один из вставленных катетеров 12 вводят устройство 16 слежения, причем во время данного введения устройства 16 слежения конец устройства 16 слежения перемещается вдоль различных местоположений внутри соответствующего катетера 12, и определяют положения конца устройства 16 слежения в различных местоположениях. Кроме того, когда устройство 16 слежения достигает наиболее удаленного положения внутри соответствующего катетера 12, данное положение также определяют. На этапе 203 данные положения используют для определения позиции и формы соответствующего катетера 12 внутри человека 2. Например, определенные положения, которые расположены вдоль линии, изображающей позицию и форму соответствующего катетера 12, могут непосредственно определять позицию и форму соответствующего катетера 12, так что последовательность получаемых определенных положений устройства 16 слежения может быть непосредственно рассмотрена как представляющая собой определенную позицию и форму соответствующего катетера 12. Этапы 202 и 203 выполняют для каждого катетера 12, вставленного в человека 2, для того чтобы определять для каждого катетера 12 позицию и форму внутри человека 2.
На этапе 204 позицию и форму целевой области 11, подлежащей лечению, внутри человека 2 предоставляют с помощью узла предоставления позиции и формы целевой области. В частности, используют TRUS-изображение для определения позиции и формы целевой области 11 посредством применения, например, алгоритма сегментации к TRUS-изображению. На этапе 205 определяют план лечения на основании позиции и формы катетеров 12, позиции и формы целевой области 11, наиболее удаленного положения устройства 16 слежения внутри соответствующего катетера 12 и расстояния X3, определенного в процедуре первоначальной калибровки, причем данное расстояние X3 может быть обновлено в последующей процедуре обеспечения качества. Определенный план лечения может использоваться системой 1 для брахитерапии для перемещения источников излучения внутри катетеров 12 в соответствии с планом лечения.
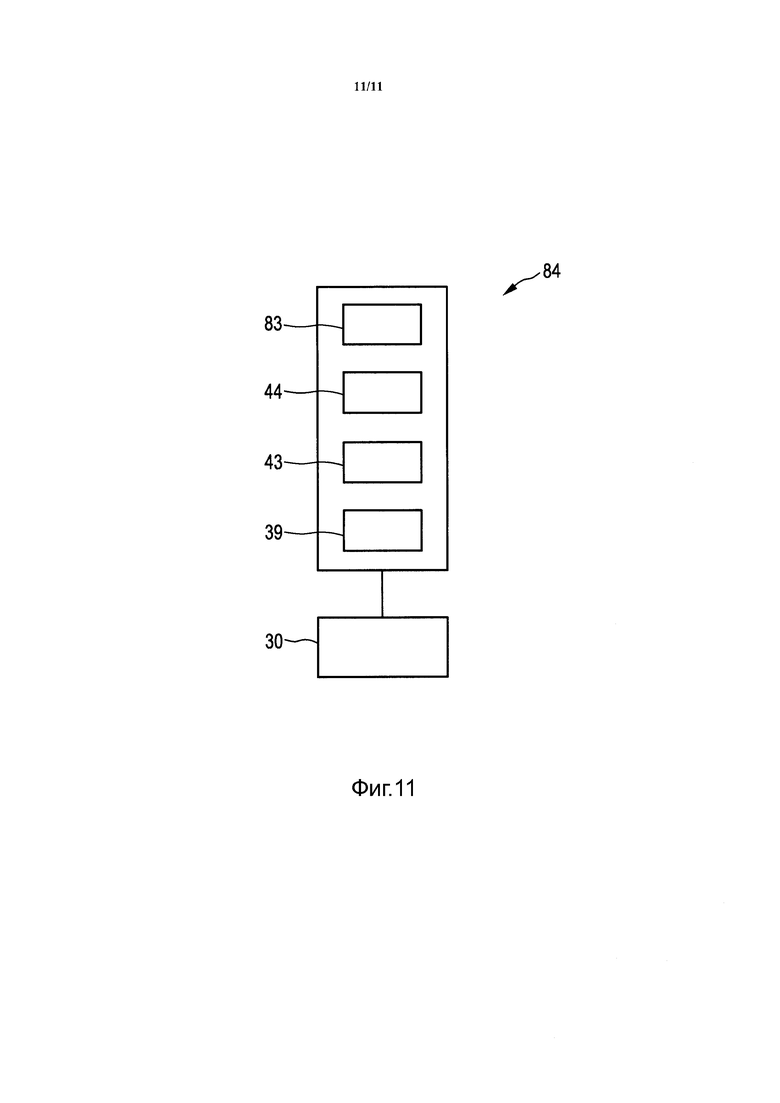
Узел 6 предоставления положения устройства слежения, узел 44 определения позиции и формы устройства введения, узел 43 предоставления позиции и формы целевой области и узел 39 определения плана лечения, описанные выше со ссылкой на, например, фиг. 1, можно рассматривать как образующие приспособление для определения лечения для определения плана лечения для брахитерапии, которое интегрировано с системой для брахитерапии. В других вариантах осуществления приспособление для определения плана лечения может также представлять собой отдельное приспособление для определения плана лечения для брахитерапии, причем определенный план лечения передается в систему для брахитерапии для осуществления брахитерапии в соответствии с планом лечения. Такое отдельное приспособление для определения плана лечения схематично и в качестве примера показано на фиг. 11.
Приспособление 84 для определения плана лечения содержит узел 83 предоставления положения устройства слежения для предоставления положений устройства 16 слежения внутри соответствующего катетера 12, причем данные положения определяют вдоль длины соответствующего катетера 12. Узел 83 предоставления отслеживаемого положения дополнительно выполнен с возможностью предоставления наиболее удаленного положения устройства 16 слежения внутри соответствующего катетера 12. В данном варианте осуществления узел 83 предоставления положения устройства слежения выполнен с возможностью приема отслеживаемых положений устройства 16 слежения и предоставления этих принятых отслеживаемых положений. Приспособление 84 для определения плана лечения дополнительно содержит узел 44 определения позиции и формы устройства введения, узел 43 предоставления позиции и формы целевой области и узел 39 определения плана лечения, описанные выше со ссылкой на фиг. 1. Кроме того, приспособление 84 для определения плана лечения также содержит дисплей 30 для отображения, например, предоставленных положений, позиций и форм.
Брахитерапия, предпочтительно, выполнена с возможностью выполнения брахитерапии HDR как формы терапии рака, которая использует высокие дозы ионизирующего излучения, доставляемые за короткий период времени порядка нескольких минут непосредственно в мишень или рядом с ней. Благодаря использованию высоких мощностей доставки дозы предел ошибки минимален. Поэтому важно не только иметь возможность разработки точного плана лечения, но также доставки излучения точно в соответствии с разработанным планом лечения. Для того чтобы получить точный план лечения и, соответственно, точную брахитерапевтическую процедуру, система для брахитерапии, предпочтительно, выполнена с возможностью обеспечения пространственного совмещения для предоставления возможности беспребойного использования, например, технологии EM-отслеживания при планировании и доставке брахитерапии.
В частности, система для брахитерапии, предпочтительно, выполнена с возможностью предоставления основанной на изображениях технологии согласования положений конца катетера, наиболее удаленного достижимого положения EM-трекера внутри соответствующего катетера и наиболее удаленного достижимого положения имитационного источника излучения внутри соответствующего катетера, причем для определения этих положений, предпочтительно, используют методы радиографической визуализации. Когда вычисляют и выполняют план лечения, предпочтительно, определяют и учитывают пространственные смещения между каждыми из данных величин. Данные пространственные смещения, предпочтительно, первоначально вычисляют, когда оборудование разворачивают в первый раз. Данные измерения и определения пространственных смещений могут поэтому также рассматриваться как представляющие собой измерения базового уровня или измерения при вводе в эксплуатацию. Система для брахитерапии, предпочтительно, дополнительно выполнена с возможностью периодического выполнения процедуры обеспечения качества, во время которой смещения могут быть при необходимости пересчитаны и сравнены с измерениями базового уровня или при вводе в эксплуатацию.
Для осуществления процедуры обеспечения качества, предпочтительно, количественно определяют пространственные взаимоотношения между TRUS-определенными концами катетеров и EM-определенными концами катетеров, т.е. наиболее удаленными положениями конца устройства слежения, для использования в EM-TRUS клиническом процессе.
Система для брахитерапии, описанная выше со ссылкой на фиг. 1, предпочтительно, выполнена с возможностью выполнения брахитерапии HDR. Однако, в других вариантах осуществления система для брахитерапии может также быть выполнена с возможностью выполнения другого типа брахитерапии. Кроме того, в вышеописанных вариантах осуществления система для брахитерапии выполнена с возможностью лечения предстательной железы человека. В других вариантах осуществления система для брахитерапии может быть выполнена с возможностью лечения другой части живого объекта, такой как другие органы.
Хотя в вышеописанных вариантах осуществления используется TRUS-визуализация для различных целей во время всей брахитерапевтической процедуры, например для контроля вставки катетеров, для осуществления процедуры обеспечения качества и так далее, другие методы визуализации также можно использовать для этих целей. Например, можно использовать другой тип ультразвуковой визуализации, компьютерную томографическую визуализацию и так далее.
Хотя в вышеописанных вариантах осуществления основанную на радиографии процедуру калибровки проводят только первоначально, до того, как соответствующее оборудование используется в первый раз, в других вариантах осуществления данная процедура может осуществляться многократно с периодическими интервалами, для того чтобы обновлять результаты процедуры первоначальной калибровки.
Хотя в вышеописанных вариантах осуществления система для введения воздействующего элемента в объект, причем воздействующий элемент выполнен с возможностью воздействия на целевую область внутри объекта, представляет собой систему для брахитерапии, причем воздействующий элемент представляет собой источник излучения, и причем план воздействия представляет собой план брахитерапевтического лечения, в других вариантах осуществления система может также быть выполнена с возможностью введения в объект другого типа воздействующего элемента. Например, система может быть выполнена с возможностью выполнения другой интервенционной процедуры с использованием рабочего канала, в который устройство слежения, такое как EM устройство слежения или FOSSL устройство слежения, исходно вставлено для определения позиции и формы рабочего канала, причем тогда воздействующий элемент, который можно рассматривать как представляющий собой устройство доставки терапии, такое как стент, абляционная игла и так далее, может быть вставлен в рабочий канал для доставки терапии.
Другие варианты раскрытых вариантов осуществления могут быть поняты и осуществлены специалистами в данной области техники при осуществлении заявленного изобретения на практике благодаря изучению чертежей, раскрытия и прилагаемой формулы изобретения.
В формуле изобретения слово "содержащий" не исключает другие элементы или этапы, и единственное число не исключает множественного.
Один узел или устройство может выполнять функции нескольких элементов, перечисленных в формуле изобретения. Тот факт, что определенные меры перечислены во взаимно различных зависимых пунктах формулы изобретения, не указывает на то, что комбинация данных мер не может быть использована для получения преимущества.
Процедуры, такие как идентификация конца катетера, конца устройства слежения и имитационного источника излучения на первом и втором изображениях, определение относительных положений в пространстве этих элементов, определение общей длины катетера, определение позиций и форм катетеров, определение позиции и формы целевой области, определение плана лечения и так далее, осуществляемые одним или несколькими узлами или устройствами, могут быть осуществлены любым другим количеством узлов или устройств. Данные процедуры, и/или управление калибровочным приспособлением в соответствии со способом калибровки, и/или управление приспособлением для определения плана лечения в соответствии со способом определения плана лечения могут быть реализованы в виде средств программного кода компьютерной программы и/или в виде специализированного аппаратного обеспечения.
Компьютерная программа может храниться/распространяться на подходящем носителе, таком как оптический носитель для хранения или твердотельный носитель, поставляемый вместе с другим аппаратным обеспечением или как его часть, но может также распространяться в других формах, как например, через интернет или другие проводные или беспроводные телекоммуникационные системы.
Никакие ссылочные позиции в формуле изобретения не должны интерпретироваться как ограничивающие объем.
Настоящее изобретение относится к калибровочному приспособлению для калибровки системы для введения воздействующего элемента, такого как источник излучения, в объект, в частности для калибровки системы для брахитерапии. Первое и второе изображения показывают удлиненное устройство введения, такое как катетер, и устройство слежения, такое как электромагнитно отслеживаемый проводник, вставленное в устройство введения настолько далеко, насколько возможно, и устройство введения и калибровочный элемент, имеющий те же размеры, что и воздействующий элемент, и вставленный в устройство введения настолько далеко, насколько возможно. Относительное положение в пространстве устройства слежения и калибровочного элемента определяют на основании изображений для калибровки системы. Знание данного относительного положения в пространстве делает возможным точное определение плана воздействия, такого как план брахитерапевтического лечения, и точное позиционирование воздействующего элемента в соответствии с планом воздействия, что, в свою очередь, делает возможным более точное воздействие на объект.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для калибровки аппарата гамма-терапевтического контактного облучения при брахитерапии | 2023 |
|
RU2825054C1 |
| СИСТЕМА ДЛЯ ПОДДЕРЖКИ ВЫПОЛНЕНИЯ ИНТЕРВЕНЦИОННЫХ ПРОЦЕДУР | 2017 |
|
RU2746151C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БРАХИТЕРАПИИ, ОТЛИЧАЮЩИЕСЯ ОТСЛЕЖИВАНИЕМ ПОСРЕДСТВОМ ВОСПРИЯТИЯ ФОРМЫ | 2010 |
|
RU2551931C2 |
| ЭЛЕКТРОМАГНИТНОЕ ОБНАРУЖЕНИЕ ПОЛОЖЕНИЯ АППЛИКАТОРА ДЛЯ БРАХИТЕРАПИИ С ВЫСОКОЙ МОЩНОСТЬЮ ДОЗЫ | 2008 |
|
RU2493891C2 |
| МЕДИЦИНСКИЙ ИНСТРУМЕНТ ДЛЯ ВЫСОКОДОЗНОЙ БРАХИТЕРАПИИ | 2015 |
|
RU2689179C2 |
| СПОСОБ И СИСТЕМА ДЛЯ БРАХИТЕРАПИИ | 2009 |
|
RU2515527C2 |
| УСТРОЙСТВО ВИЗУАЛИЗАЦИИ | 2010 |
|
RU2540090C2 |
| СИСТЕМА И СПОСОБ ИНТЕГРИРОВАННОЙ БИОПСИИ И ЛЕЧЕНИЯ | 2010 |
|
RU2558521C2 |
| СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ ТЕРАПЕВТИЧЕСКОЙ ПРОЦЕДУРЫ | 2015 |
|
RU2702890C2 |
| ДОЗА С КОМПЕНСАЦИЕЙ ПЕРЕМЕЩЕНИЯ, ПОЛУЧЕННАЯ ТКАНЬЮ В ПРОЦЕДУРАХ БРАХИТЕРАПИИ С ВЫСОКОЙ МОЩНОСТЬЮ ДОЗЫ | 2013 |
|
RU2665604C2 |
Группа изобретений относится к медицинской технике, а именно к средствам для калибровки системы введения воздействующего элемента в объект. Калибровочное приспособление содержит узел предоставления изображений для предоставления первого изображения, показывающего удлиненное устройство введения, и устройство слежения, выполненное с возможностью отслеживать устройство введения и вставляться в устройство введения настолько далеко по длине устройства введения, насколько возможно, и второго изображения, показывающего устройство введения и калибровочный элемент, который имеет те же размеры, что и воздействующий элемент, и который должен быть вставлен в устройство введения настолько далеко по длине устройства введения, насколько возможно, узел идентификации для идентификации конца устройства введения, устройства слежения и калибровочного элемента на первом и втором изображениях, узел определения относительного положения в пространстве устройства слежения и калибровочного элемента из первого и второго изображений, на которых были идентифицированы конец устройства введения, устройство слежения и калибровочный элемент. Приспособление для определения плана воздействия на целевую область внутри объекта содержит узел предоставления положения устройства слежения в устройстве введения, узел определения позиции и формы устройства введения, узел предоставления позиции и формы целевой области, узел определения плана воздействия в зависимости от позиции и формы устройства введения, позиции и формы целевой области, наиболее удаленного положения устройства слежения в устройстве введения и относительного положения в пространстве устройства слежения и калибровочного элемента. Способ калибровки системы введения воздействующего элемента в объект проводят посредством калибровочного приспособления с использованием машиночитаемого носителя для калибровки системы введения воздействующего элемента. Способ определения плана воздействия на целевую область внутри объекта проводят с помощью приспособления для определения плана воздействия с использованием машиночитаемого носителя для определения плана воздействия. Использование группы изобретений позволяет повысить точность позиционирования воздействующего элемента внутри объекта. 6 н. и 9 з.п. ф-лы, 11 ил.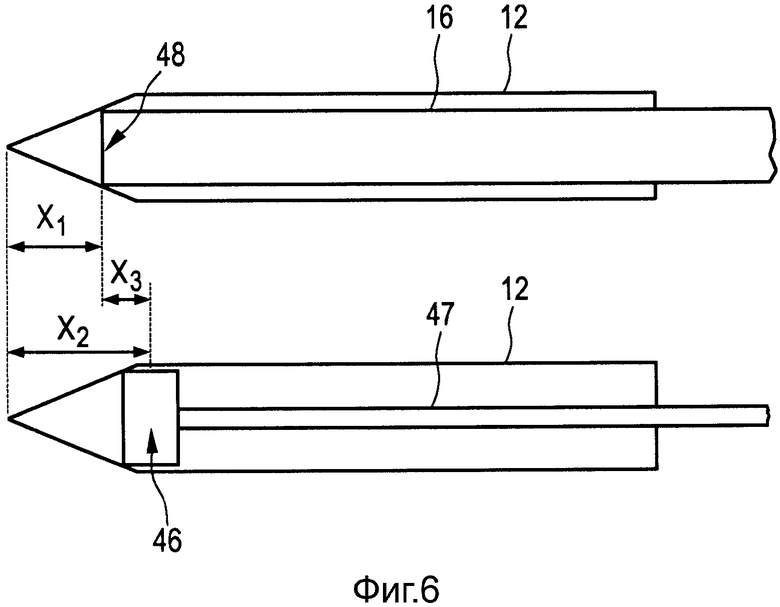
1. Калибровочное приспособление для калибровки системы для введения воздействующего элемента в объект, причем воздействующий элемент выполнен с возможностью воздействия на целевую область внутри данного объекта, при этом калибровочное приспособление содержит:
узел предоставления изображений для предоставления первого изображения, показывающего удлиненное устройство введения, которое выполнено с возможностью вставляться в объект для введения воздействующего элемента в объект, и устройство слежения, которое выполнено с возможностью отслеживать устройство введения и вставляться в устройство введения настолько далеко по длине устройства введения, насколько возможно, и второго изображения, показывающего устройство введения и калибровочный элемент, который имеет те же размеры, что и воздействующий элемент, и который должен быть вставлен в устройство введения настолько далеко по длине устройства введения, насколько возможно,
узел идентификации для идентификации конца устройства введения, устройства слежения и калибровочного элемента на первом и втором изображениях,
узел определения относительного положения в пространстве для определения относительного положения в пространстве устройства слежения и калибровочного элемента из первого и второго изображений, на которых были идентифицированы конец устройства введения, устройство слежения и калибровочный элемент.
2. Калибровочное приспособление по п.1, в котором узел определения относительного положения в пространстве выполнен с возможностью определения:
расстояния между положением конца устройства введения и положением устройства слежения из первого изображения, на котором были идентифицированы конец устройства введения и устройство слежения,
расстояния между положением конца устройства введения и положением калибровочного элемента из второго изображения, на котором были идентифицированы конец устройства введения и калибровочный элемент, и
расстояния между положением устройства слежения и положением калибровочного элемента на основе упомянутых определенных расстояния между положением конца устройства введения и положением устройства слежения и расстояния между положением конца устройства введения и положением калибровочного элемента.
3. Калибровочное приспособление по п.1, причем калибровочное приспособление дополнительно содержит:
узел предоставления ультразвуковых изображений для предоставления ультразвукового изображения конца устройства введения и
узел предоставления положения устройства слежения для предоставления положения устройства слежения, когда оно вставлено в устройство введения настолько далеко по длине устройства введения, насколько возможно,
причем узел идентификации выполнен с возможностью идентификации конца устройства введения на ультразвуковом изображении и узел определения относительного положения в пространстве выполнен с возможностью обновления относительного положения в пространстве устройства слежения и калибровочного элемента на основе ультразвукового изображения с идентифицированным концом устройства введения и предоставленным положением устройства слежения.
4. Калибровочное приспособление по п.3, в котором узел предоставления положения устройства слежения выполнен с возможностью предоставления положения устройства слежения, отслеживаемого электромагнитным образом или на основе волоконно-оптического определения формы.
5. Калибровочное приспособление по п.3, в котором узел предоставления положения устройства слежения выполнен с возможностью предоставления положений устройства слежения, когда он перемещается внутри устройства введения в направлении и/или от наиболее удаленного положения в устройстве введения, причем калибровочное приспособление дополнительно содержит узел определения длины для определения длины устройства введения на основе предоставленных положений.
6. Калибровочное приспособление по п.1, в котором узел предоставления изображений выполнен с возможностью предоставления радиографических изображений в качестве первого и второго изображений.
7. Калибровочное приспособление по п.1, дополнительно содержащее калибровочное устройство, которое содержит проницаемый для излучения блок с
непроницаемыми для излучения реперными метками (58, 59), идентифицируемыми на радиографических изображениях, и
каналом для приема устройства введения, которое выполнено с возможностью вставки в объект для введения воздействующего элемента в объект.
8. Калибровочное приспособление по п.7, при этом по меньшей мере некоторые из реперных меток расположены параллельно каналу.
9. Калибровочное приспособление по п.7, в котором упомянутый блок содержит несколько каналов, имеющих разные диаметры.
10. Калибровочное приспособление по п.7, в котором упомянутый блок совместим с ультразвуком.
11. Приспособление для определения плана воздействия для определения плана воздействия для воздействия на целевую область внутри объекта, причем данное приспособление содержит:
узел предоставления положения устройства слежения для предоставления положений устройства слежения в устройстве введения, которое вставлено в объект для введения воздействующего элемента в объект, причем эти положения определяются вдоль длины устройства введения и в наиболее удаленном положении в устройстве введения,
узел определения позиции и формы устройства введения для определения позиции и формы устройства введения исходя из предоставленных положений устройства слежения,
узел предоставления позиции и формы целевой области для предоставления позиции и формы целевой области внутри объекта,
узел определения плана воздействия для определения плана воздействия в зависимости от позиции и формы устройства введения, позиции и формы целевой области, наиболее удаленного положения устройства слежения в устройстве введения и относительного положения в пространстве устройства слежения и калибровочного элемента, определенных с помощью калибровочного приспособления по п.1.
12. Способ калибровки для калибровки системы для введения воздействующего элемента в объект, причем воздействующий элемент выполнен с возможностью воздействия на целевую область внутри данного объекта, при этом способ калибровки содержит этапы, на которых:
предоставляют первое изображение, показывающее удлиненное устройство введения, которое выполнено с возможностью вставки в живой объект для введения воздействующего элемента внутрь живого объекта, и устройство слежения, которое выполнено с возможностью отслеживания устройства введения и которое вставлено в устройство введения настолько далеко по длине устройства введения, насколько возможно, и второе изображение, показывающее устройство введения и калибровочный элемент, который имеет те же размеры, что и воздействующий элемент, и который вставлен в устройство введения настолько далеко по длине устройства введения, насколько возможно, с помощью узла предоставления изображений,
идентифицируют конец устройства введения, устройство слежения и калибровочный элемент на первом и втором изображениях с помощью узла идентификации,
определяют относительное положение в пространстве устройства слежения и калибровочного элемента из первого и второго изображений, на которых были идентифицированы устройство введения, устройство слежения и калибровочный элемент, с помощью узла определения относительного положения в пространстве.
13. Способ определения плана воздействия для определения плана воздействия для воздействия на целевую область внутри объекта, причем способ определения плана воздействия содержит этапы, на которых:
предоставляют положения устройства слежения в устройстве введения, которое вставлено в объект для введения воздействующего элемента в объект, с помощью узла предоставления положения устройства слежения, причем эти положения определяются вдоль длины устройства введения и в наиболее удаленном положении в устройстве введения,
определяют позицию и форму устройства введения исходя из предоставленных положений устройства слежения с помощью узла определения позиции и формы устройства введения,
предоставляют позицию и форму целевой области внутри объекта с помощью узла предоставления позиции и формы целевой области,
определяют план воздействия в зависимости от позиции и формы устройства введения, позиции и формы целевой области, наиболее удаленного положения устройства слежения в соответствующем устройстве введения и относительного положения в пространстве устройства слежения и калибровочного элемента, определенных с помощью калибровочного приспособления по п.1, посредством узла определения плана воздействия.
14. Машиночитаемый носитель, на котором сохранена калибровочная компьютерная программа для калибровки системы для введения воздействующего элемента в объект, причем воздействующий элемент выполнен с возможностью воздействия на целевую область внутри данного объекта, причем калибровочная компьютерная программа содержит средства программного кода для предписания калибровочному приспособлению по п.1 выполнять этапы упомянутого способа калибровки, когда калибровочная компьютерная программа запущена на компьютере, управляющем калибровочным приспособлением.
15. Машиночитаемый носитель, на котором сохранена компьютерная программа для определения плана воздействия для определения плана воздействия для воздействия на целевую область внутри объекта, причем компьютерная программа для определения плана воздействия содержит средства программного кода для предписания приспособлению для определения плана воздействия по п.11 выполнять этапы упомянутого способа определения плана воздействия, когда компьютерная программа для определения плана воздействия запущена на компьютере, управляющем приспособлением для определения плана воздействия.
| US 2007129593 Al, 07.06.2007 | |||
| US 6112113 A, 29.08.2000 | |||
| WO 2005092197 A1, 06.10.2005 | |||
| US 2008004481 A1, 03.01.2008 | |||
| RU 2009102854 A, 10.08.2010. |

