Изобретение относится к оптическому приборостроению, а именно к способам измерения формы волнового фронта световой волны и к датчикам волнового фронта световой волны. Известен ряд способов измерения волнового фронта и датчиков волнового фронта. В датчике Шака-Гартмана измеряется наклон отдельных участков волнового фронта к оптической оси датчика [1]. По измеренным наклонам рассчитывается форма волнового фронта. В датчике кривизны форма волнового фронта рассчитывается исходя из распределений интенсивности световой волны, падающей на объектив, измеренных по обе стороны от фокальной плоскости объектива [2] или с одной стороны от фокальной плоскости [3]. В астрономии используются пирамидальный датчик волнового фронта, у которого изображение звезды падает на вершину четырехгранной пирамиды, при этом возникают 4 изображения выходного зрачка телескопа. По распределениям интенсивностей этих изображений находится форма волнового фронта [4,5]. В данных датчиках распределение интенсивности света измеряется CCD или CMOS матрицами, сигналы от миллионов светочувствительных пикселей которых должны пройти сложный процесс обработки, чтобы получить картину волнового фронта. Необходимость сложной обработки большого числа сигналов снижает скорость измерения волнового фронта и делает необходимым использование дорогих компьютеров и дорогого программного обеспечения, когда измерения волнового фронта необходимо выполнять с высокой скоростью. Так, в датчиках волнового фронта астрономических телескопов, измеряющих искажений волнового фронта вызванных турбулентностью атмосферы, для обработки сигналов датчиков используются мейнфрейм серверы.
Этот недостаток отсутствует у голографических модовых датчиков волнового фронта, измеряющих амплитуды мод волнового фронта световой волны [6,7,8,9]. Волновой фронт находится как суперпозиция измеренных мод. Число сигналов голографического модового датчика в два раза превышает число измеряемых мод и исчисляется десятками. Небольшое число сигналов, простой процесс их обработки и возможность измерения сигналов фотодиодами обеспечивают высокую скорость измерения волнового фронта.
Один из недостатков голографических модовых датчиков состоит в малой интенсивности сигнальных волн восстановленных голограммами датчика, в силу того, что в датчиках используются наложенные голограммы, то есть голограммы записанных на одном участке регистрирующей среды, чья дифракционная эффективность мала [10]. Другой недостаток состоит в погрешности измерения интенсивности сигналов из-за смещения в пространстве измеряемого распределения интенсивности в зависимости от характера искажений измеряемого волнового фронта [11].
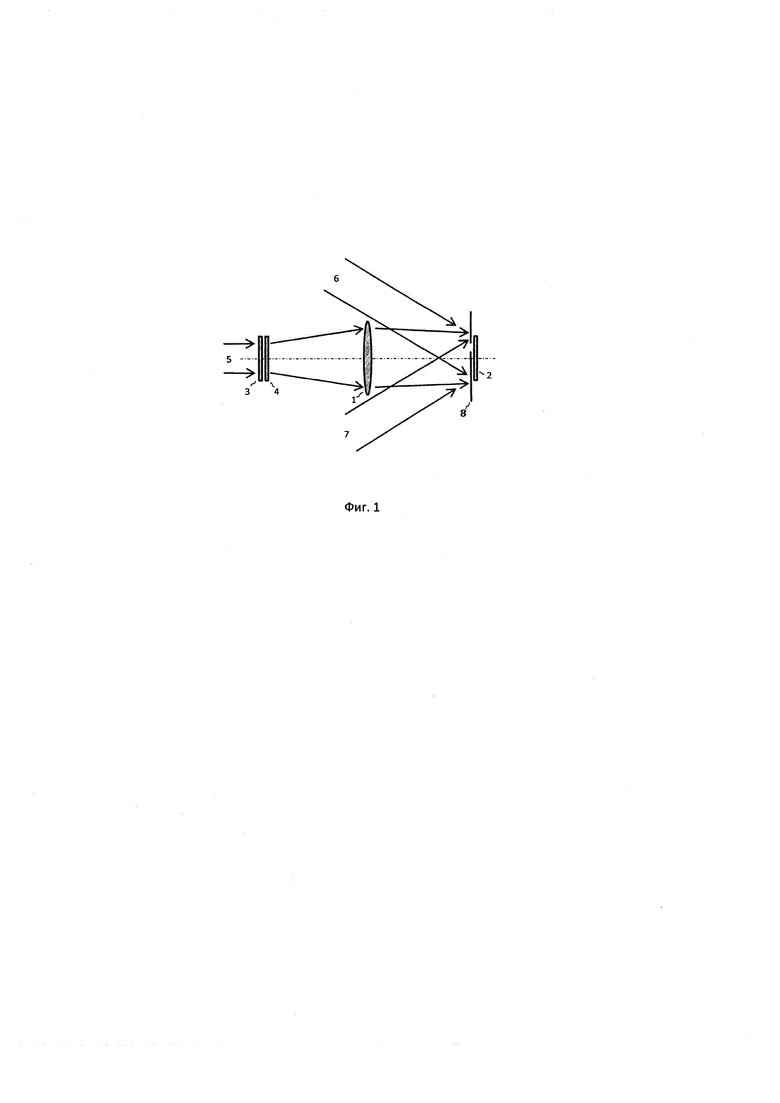
Указанные недостатки отсутствует, у голографического модового датчика основанного на фурье-голограммах рассеянных мод Цернике волнового фронта, в котором вместо наложенных голограмм используются голограммы, записанные на разных участках регистрирующей среды [12,13]. По технической сущности этот датчик наиболее близок к предложенному датчику и служит его прототипом. Схема записи голограмм данного датчика представлена на Фиг.1, где 1 объектив, в передней фокальной плоскости которого находится рассеиватель 3, рассеивающий волну 5, падающую на рассеиватель 3. За рассеивателем установлен поляризатор 4, поляризующий излучение в направлении перпендикулярном к плоскости содержащей опорные и объектные волны голограмм. В задней фокальной плоскости объектива 1 возникает диффузный пучок света, служащий опорной волной при записи голограмм на регистрирующей среде 2. Для измерения одной моды Цернике записывается две голограммы. Одна голограмма записывается с опорной волной возникающей, когда на рассеиватель падает волна 5 с положительной амплитудой моды Цернике, другая голограмма при отрицательной амплитуде моды Цернике. Для измерения большего числа мод записывается столько пар голограмм, сколько мод Цернике датчик должен измерять.
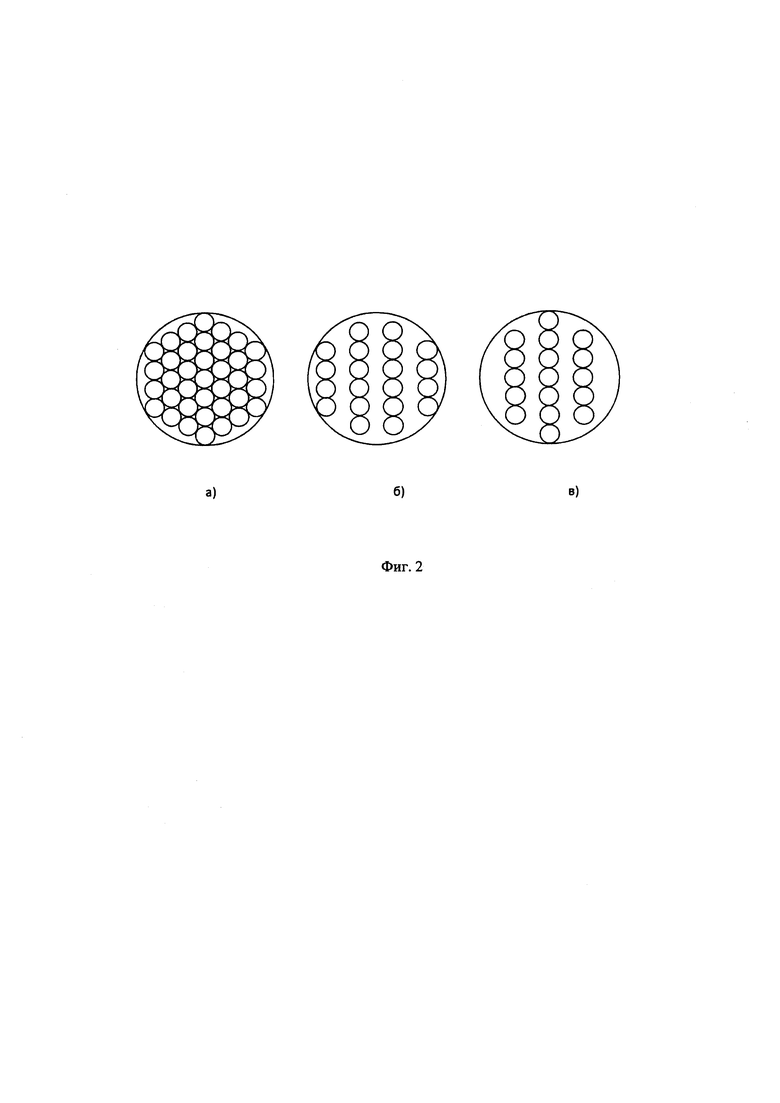
Объектными волнами голограмм служат две плоские волны 6 и 7, падающие на регистрирующую среду под разными углами. Одна плоская волна используется для записи голограмм записанных с положительной амплитудой моды опорной волны, другая волна для записи голограмм записанных с отрицательной амплитуды моды. При записи голограмм используется подвижная диафрагма 8, выделяющая участки регистрирующей среды 2 на которых записываются голограммы. Взаимное расположение 61-ой голограммы в виде гексагональной решетки представлено на Фиг.2(а). Голограммы записанные с объектной волной 6 представлены на Фиг.2 (б), голограммы записанные с объектной волной 7 на Фиг.2 (в). Использование при записи голограмм двух объектных волн обеспечивает образование между восстановленными волнами промежутков достаточных для размещения фотодиодов, измеряющих интенсивность восстановленных волн.
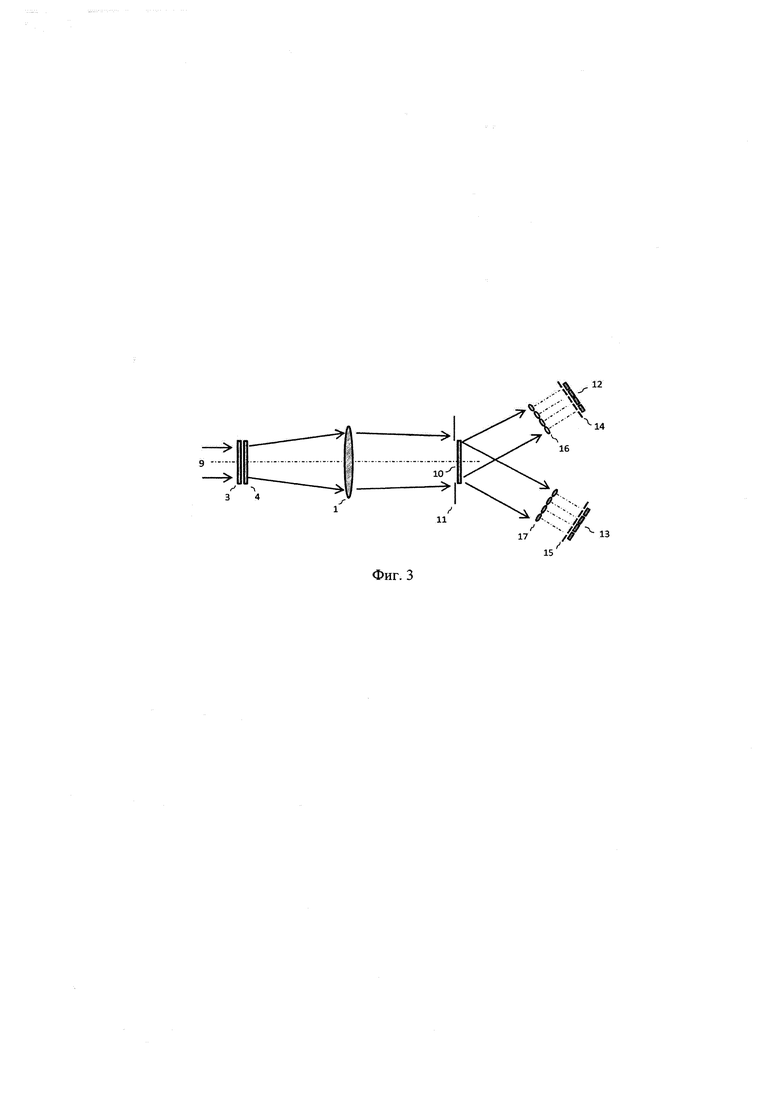
При измерении датчиком волнового фронта, измеряемая волна 9 (Фиг.3) падает на рассеиватель 3. Рассеянная волна, вышедшая из объектива 1, освещает голограммы 10, ограниченные диафрагмой 11. Если волновой фронт волны 9 описывается модой Цернике использованной при записи некоторой пары голограмм 10, то голограммы этой пары восстанавливают две объектные волны, интенсивности которых зависят от степени близости амплитуды моды измеряемой волны к амплитудам моды использованной при записи голограмм. Максимальная интенсивность волны восстановленной любой из голограмм данной пары голограмм достигается, когда амплитуда моды измеряемой волны равна амплитуде моды волны использованной при записи данной голограммы. При этом интенсивность волны восстановленной другой голограммой данной пары голограмм минимальна. По разности интенсивностей двух восстановленных волн определяется амплитуда измеряемой моды. Интенсивности восстановленных волн измеряются решетками фотодиодов 12 и 13, установленными за решетками микродиафрагм 14 и 15, расположенных в фокальных плоскостях решеток микрообъективов 16 и 17. В каждый микрообъектив поступает волна восстановленная одной из голограмм. На Фиг.3 представлен случай, когда измеряются интенсивности восьми волн, восстановленных восемью голограммами.
Недостаток данного датчика волнового фронта, как и всех других голографических модовых датчиков волнового фронта, состоит в интермодовых помехах, возникающих, когда измеряемая волна содержит более одной моды волнового фронта [11]. Каждая мода измеряемого волнового фронта создает помехи для волн восстановленных другими модами волнового фронта. В силу интермодовых помех известные голографические модовые датчики способны измерять волновые фронты, содержащие лишь несколько мод маленькой амплитуды. Для уменьшения интермодовых помех были предложены гибридные датчики волнового фронта, совмещающие модовый датчик с датчиком Шака-Гартмана [14] или модовый датчик с датчиком кривизны [15]. Данные датчики имеют недостаток в виде необходимости сложной обработки большого числа сигналов светочувствительной матрицы.
Цель настоящего изобретения состоит в создании способа измерения мод волнового фронта и устройства, осуществляющего данный способ, обеспечивающих измерение с высокой скоростью десятков мод Цернике волнового фронта когерентной световой волны.
Указанная цель достигается тем, что способ измерения мод волнового фронта содержит итерационный процесс, в ходе которого аберрации волнового фронта измеряются и устраняются по мере увеличения диаметра измеряемого волнового фронта, что отличает предложенный способ от известных итерационных способов измерения мод волнового фронта [16]. Для осуществления данного способа измерения используется устройство содержащие корректор волнового фронта и голографический модовый датчик волнового фронта. Голографический модовый датчик основан на фурье-голограммах рассеянных мод Цернике волнового фронта и отличается от прототипа [12,13] тем, что измеряет волновой фронт одновременно на разных его диаметрах.
При первом цикле итерационного процесса голографический модовый датчик волнового фронта измерят амплитуды мод, на первом, наименьшем диаметре волнового фронта, который достаточно мал, чтобы априори было известно, что при таком диаметре волнового фронта интермодовые помехи настолько малы, что можно измерить одну или несколько первых мод Цернике волнового фронта. Корректор волнового фронта уменьшает амплитуды мод на первом диаметре волнового фронта на величины амплитуд мод измеренные голографическим модовым датчиком волнового фронта. После уменьшения амплитуд мод корректором волнового фронта голографический модовый датчик волнового фронта повторно измеряет амплитуды ранее измеренных мод. Амплитуда каждой моды на первом диаметре волнового фронта находится как сумма амплитуды моды измеренной до уменьшения амплитуд мод корректором волнового фронта и амплитуды моды измеренной после коррекции волнового фронта.
При втором цикле итерационного процесса по найденным амплитудам мод на первом диаметре волнового фронта, рассчитываются приближенные значения амплитуд мод Цернике на втором диаметре волнового фронта. Для каждой моды ее приближенное значение на втором диаметре находится как значение амплитуды моды, измеренное на первом диаметре волнового фронта, умноженное на отношение второго диаметра к первому диаметру, возведенное в степень равную степени полинома, описывающего данную моду. Данный способ расчета приближенных значений амплитуд мод основан на соотношениях, связывающих амплитуды мод на разных диаметрах волнового фронта [17]. Второй диаметр волнового фронта определяется из условия его достаточно малого увеличения по сравнению с первым диаметром, при котором расчетные приближенные значения мод близки к их фактическим значениям. Корректор волнового фронта уменьшает амплитуды мод волнового фронта на его втором диаметре на величины равные расчетным приближенным значениям мод, что уменьшает интермодовые помехи и позволяет голографическому модовому датчику измерить моды на втором диаметре волнового фронта. Амплитуда каждой моды на втором диаметре волнового фронта находится как сумма расчетного приближенного значения амплитуды и амплитуды моды измеренной голографическим модовым датчиком после коррекции аберраций. На втором диаметре волнового фронта могут измеряться дополнительные моды, не измеренные на первом диаметре.
При третьем цикле итерационного процесса по найденным амплитудам мод на втором диаметре волнового фронта, рассчитываются приближенные значения мод на третьем диаметре волнового фронта. Для каждой моды ее приближенное значение на третьем диаметре находится как значение амплитуды моды, измеренное на втором диаметре волнового фронта, умноженное на отношение третьего диаметра ко второму диаметру, возведенное в степень равную степени полинома, описывающего данную моду. Третий диаметр волнового фронта определяется из условия его достаточно малого увеличения по сравнению с первым диаметром, при котором расчетные приближенные значения мод близки к их фактическим значениям. Корректор волнового фронта уменьшает амплитуды аберраций волнового фронта на его третьем диаметре на величины равные расчетным приближенным значениям мод, что обеспечивает малость интермодовых помех и позволяет голографическому модовому датчику измерить моды на третьем диаметре волнового фронта. Амплитуда каждой моды на третьем диаметре волнового фронта находится как сумма расчетного приближенного значения амплитуды и амплитуды моды измеренной голографическим модовым датчиком после коррекции волнового фронта. На третьем диаметре волнового фронта могут измеряться дополнительные моды, не измеренные на втором диаметре.
Итерационный процесс продолжается подобным образом для больших диаметров волнового фронта. Последний N-ый цикл итерационного процесса начинается расчетом приближенных значений амплитуд мод на N-ом, максимальном диаметре измеряемого волнового фронта, равном диаметру рассеивателя 3 датчика (Фиг.3). Для каждой моды ее приближенное значение на N-ом диаметре находится как значение амплитуды моды, измеренное на (N-1)-ом диаметре волнового фронта, умноженное на отношение N-го диаметра к N-1 диаметру, возведенное в степень равную степени полинома, описывающего данную моду. Значение (N-1)-го диаметра волнового фронта определяется из условия его достаточно малого уменьшения по сравнению с N-ым диаметром, при котором расчетные приближенные значения амплитуд мод близки к их фактическим значениям. Корректор волнового фронта уменьшает амплитуды мод волнового фронта на его N-ом диаметре на величины равные расчетным приближенным значениям мод, что обеспечивает малость интермодовых помех и позволяет голографическому модовому датчику измерить моды на N-ом диаметре волнового фронта. На этом итерационный процесс заканчивается.
Голографический модовый датчик волнового фронта измеряет моды на N-ом диаметре волнового фронта, на котором могут измеряться дополнительные моды, не измеренные на (N-1)-ом диаметре. Корректор волнового фронта компенсирует аберраций волнового фронта на его N-ом диаметре, уменьшая амплитуды мод на их измеренные значения.
При измерении волнового фронта на одном из его диаметров одновременно измеряются волновые фронты на всех меньших диаметрах волнового фронта. Если голографический модовый датчик в силу каких либо причин, например, слишком больших амплитуд мод, оказывается неспособным измерить амплитуды на одном из диаметров волнового фронта, то итерационный процесс возобновляется на одном из меньших диаметров волнового фронта, на котором волновой фронт измеряется.
В ходе итерационного процесса, целесообразно использовать диаметр измеряемого волнового фронта составляющий 0,816 часть от его максимального диаметра. На данном диаметре, как следует из примера выполнения изобретения, меньше разница приближенного расчетного и фактического значения амплитуд мод Цернике.
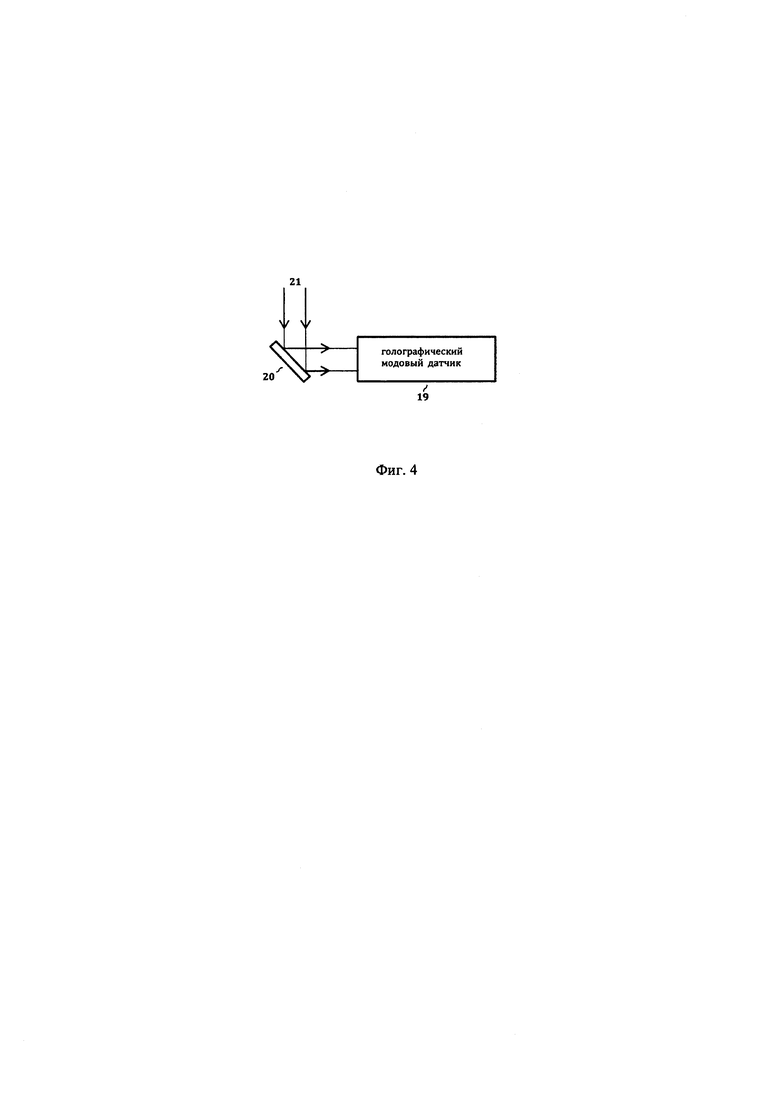
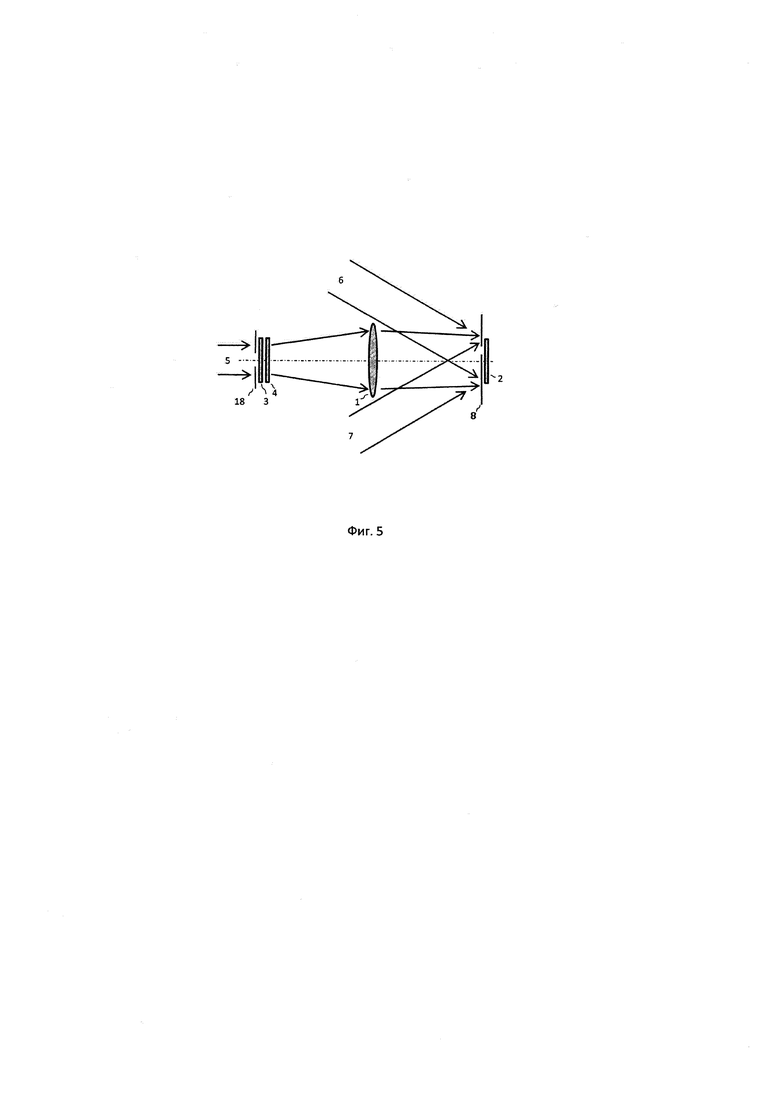
Для осуществления предложенного способа измерении мод волнового фронта используется устройство, схема которого представлена на Фиг.4, содержащее голографический модовый датчик волнового фронта 19 и корректор волнового фронта 20, устраняющий аберрации измеряемой волны 21. Голографический модовый датчик, отличается от своего прототипа тем, что голограммы датчика записываются при разных диаметрах падающей на рассеватель 3 волны 5 (Фиг.5). Для получения заданного диаметра волны 5 используется диафрагма переменного диаметра 18, установленная перед рассеивателем 3. Значения диаметров волны 5 и амплитуд мод Цернике, при записи голограмм, определяются согласно предложенному способу измерения волнового фронта. Запись голограмм при разных диаметрах падающей на рассеиватель 3 волны 5 позволяет предложенному датчику измерять моды волнового фронта одновременно на разных диаметрах волнового фронта. У предложенного голографического модового датчика волнового фронта такая же схема взаимного расположения элементов датчика, как и у известного датчика, представленная на Фиг.3. Голограммы предложенного датчика расположены в пределах равностороннего шестиугольника, подобно их расположению на Фиг.2.
Перечень фигур
Фиг.1 схема записи голограмм известного голографического модового датчика волнового фронта.
Фиг.2 взаимное расположение голограмм голографического модового датчика волнового фронта
Фиг.2 (а) голограммы записанные с использованием двух объектных волн.
Фиг.2 (б) голограммы записанные с использованием одной объектной волны.
Фиг.2 (в) голограммы записанные с использованием другой объектной волны.
Фиг.3 схема голографического модового датчика волнового фронта,
Фиг.4 схема устройства для измерения мод волнового фронта.
Фиг.5 схема записи голограмм предложенного голографического модового датчика волнового фронта.
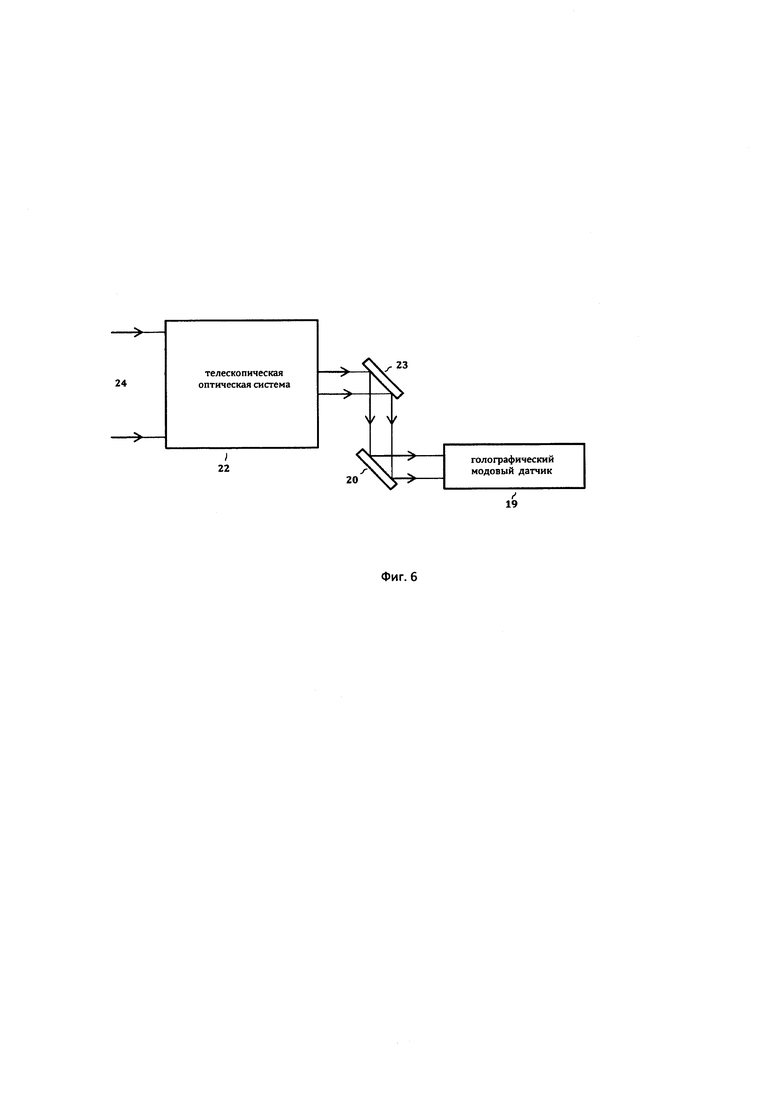
Фиг.6 схема использования устройства для измерения мод волнового фронта совместно с телескопической оптической системой и корректором наклонов волнового фронта.
Для лучшего понимания сущности заявленного изобретения приводим пример осуществления изобретения, когда аберрации волнового фронта световой волны вызваны турбулентностью атмосферы. В примере рассмотрен случай, когда световая волна с длиной волны  диаметром 300 мм распространяется на расстояние 410 метров на высоте 12 метров над поверхностью земли и отражается в обратном направлении [18].
диаметром 300 мм распространяется на расстояние 410 метров на высоте 12 метров над поверхностью земли и отражается в обратном направлении [18].
Аберрации волны описываются модами Цернике 
Таблица 1


В Таблице 1 также представлены амплитуды мод 

Амплитуды мод являются случайными величинами и могут намного превосходить значения указанные в таблице 1. Тем не менее, с достаточно большой вероятностью они становятся равными или меньшими данных значений. В этот момент времени начинается итерационный процесс измерения и компенсации аберраций.
В данном примере устройство для измерения мод волнового фронта, в составе голографического модового датчика волнового фронта 19 и корректора волнового фронта 20, необходимо использовать совместно с телескопической оптической системой 22 и корректором наклонов волнового фронта 23 [19] (Фиг.6). Телескопическая оптическая система 22 уменьшает диаметр измеряемой волны 24 с 300 мм до 10 мм, корректор наклонов волнового фронта 23 устраняет отклонение направления распространения волны от оптической оси датчика.
В Таблице 2 представлены параметры способа измерения мод волнового фронта. В первой колонке таблицы указаны диаметры измеряемого волнового фронта в плоскости рассеивателя.
Таблица 2
мм
мод после коррекции рад2
n=2
m=0,±2
n=3,
m=±1,±3
n=4,
m=
0,±2,±4
n=5
m=±1,±3,
±5
n=6
m=0,±2,
±4,±6
коррекция
измерение
измерение
измерение
-
-
-
измерение
измерение
-
-
-
измерение
измерение
измерение
-
-
измерение
измерение
измерение
измерение
-
измерение
измерение
измерение
измерение
измерение
В первой строке, соответствующей указанному диаметру, указаны операции выполняемые на данном диаметре, а именно измерение волнового фронта или коррекция волнового фронта и последующее его измерение. Во второй и третьей строках, соответствующих указанному диаметру, указаны дисперсии мод волнового фронта до коррекции волнового фронта и после его коррекции. Дисперсии мод волнового фронта до его коррекции находятся с использованием выражений [17], позволяющих найти амплитуду моды на меньшем диаметре волнового фронта при известных амплитудах мод на большем диаметре волнового фронта, в данном случае на диаметре 10 мм.
На диаметре волнового фронта 4 мм сумма дисперсий мод волнового фронта 

достаточно большое, чтобы можно было измерить амплитуды указанных в таблице трех первых мод.
При первом цикле итерационного процесса голографический модовый датчик измеряет амплитуды данных мод, затем корректор волнового фронта уменьшает их амплитуды на измеренные датчиком величины амплитуд и голографический модовый датчик повторно измеряет на первом диаметре волнового фронта амплитуды ранее измеренных мод. Амплитуда каждой моды на первом диаметре волнового фронта находится как сумма амплитуды моды измеренной до уменьшения аберраций и амплитуды моды измеренной после уменьшения аберраций волнового фронта. Затем начинается второй цикл итерационного процесса.
Рассмотрим один цикл итерационного процесса для аберраций 

На следующем цикле, при диаметре 8,16 мм, амплитуды аберраций

Приближенное расчетное значение данных амплитуд находятся исходя из значения амплитуд 
Корректор волнового фронта уменьшает амплитуды аберраций на величины 

При данных амплитудах дисперсия аберраций
В выражении (2) отсутствует амплитуда 
Из Таблицы 2 следует, что максимальная дисперсия амплитуды волнового фронта 0,497 рад2 имеет место при максимальном диаметре волнового фронта. При данной дисперсии число Штреля 
1. B.C. Platt and R.Shack, History and principles of Shack-Hartmann wavefront sensing // J.
Refractive Surgery, Vol.17, N5, pp.573-577, (2001)
2. F. Roddier, Curvature sensing and compensation: a new concept in adaptive optics // Appl.
Opt., Vol.27, N7, pp.1223-1226, (1988)
3. Патент RU 2 680 615 С1, 10.04.2018
4. Ragazzoni R. Pupil plane wavefront sensing with an oscillating prism // Journal of Modern Optics, Vol.43, Issue 2 pp.289- 293, (1996)
[5] K. E. Hadi, M. Vignaux, T. Fusco, Development of a pyramid wavefront sensor // Third AO4ELT Conference - Adaptive Optics for Extremely Large Telescopes. Florence, Italy. May (2013)
6. M. A. A. Neil, J. Booth, T. Wilson, New modal wave-front sensor: a theoretical analysis // J. Opt. Sos. Am. A, Vol.17, N 6, pp.1098-1107, (2000)
7. M. J. Booth, Direct measurement of Zernike aberration mode with a modal wavefront sensor // Proc. SPIE, Vol.5162, pp.79-90, (2003)
8 Патент US 6,285,456 B1
9. Патент US 7,645,972 B2
10. Р, Кольер, К. Беркхарт, Л. Лин. М.: Мир, 1973.-686 с.
11. F. Kong, A. Lambert, Improvements to the modal holographic wavefront sensor // Applied Optics, Vol.55, N. 13, pp.3615-3625, (2016)
12. В. В. Орлов, Голографический модовый датчик волнового фронта с увеличенным числом измеряемых мод // Квантовая электроника, том 47, №8, стр.773-776, (2017)
13. V.V.Orlov, V.Yu.Venediktov, A.V.Gorelaya, E.V.Shubenkova, D.Z. Zhamalatdinov, Measurement of Zernike mode amplitude by the wavefront sensor, based on the Fourier-hologram of the diffuse scattered mode // Optics and Laser Technology Vol.116, August, pp.214-218, (2019).
14. S. Dong, T. Haist, W. Osten, Hybrid wavefront sensor for the fast detection of wavefront disturbances // APPLIED OPTICS, Vol.51, No. 25, pp.6268-6274, (2012)
15 S. Dong, T. Haist, T. Dietrich, W. Osten, Hybrid curvature and modal wavefront sensor // Proc. of SPIE Vol.9227, pp.922702-1-922702-12, (2014)
16. M. A. A. Neil, M. J. Booth, T. Wilson. Closed-loop aberration correction by use of a modal Zernike wave-front sensor // OPTICS LETTERS Vol.25, No. 15, pp.1083-1985, (2000)
17. J. Schwiegerling. Scaling Zernike expansion coefficients to different pupil sizes // J. Opt. Soc. Am. A, Vol.19, No. 10, pp.1937-1945, (2002)
18. Experimental setup for investigation of laser beam propagation along horizontal urban path. R. Barros, S. Keary, L. Yatcheva, et al. // Proc. SPIE 9242, Remote Sensing of Clouds and the Atmosphere XIX; and Optics in Atmospheric Propagation and Adaptive Systems XVII, 92421L, (2014).
19. О.И. Шанин. Адаптивные оптические системы коррекции наклонов. Резонансная адаптивная оптика. М.: Техносфера, 2013.-296 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АНАЛИЗА ВОЛНОВОГО ФРОНТА СВЕТОВОГО ПОЛЯ | 2010 |
|
RU2430389C1 |
| СПОСОБ КОМПЕНСАЦИИ ФАЗОВЫХ ИСКАЖЕНИЙ ВОЛНОВОГО ФРОНТА НА ОСНОВЕ СВЕТОВОГО ПОЛЯ | 2022 |
|
RU2808933C1 |
| Способ голографического контроля волновых аберраций линз и объективов | 1991 |
|
SU1772608A1 |
| СПОСОБ ГОЛОГРАФИЧЕСКОГО КОНТРОЛЯ ВОЛНОВОГО ФРОНТА | 1993 |
|
RU2054618C1 |
| СПОСОБ ГОЛОГРАФИЧЕСКОГО КОНТРОЛЯ ВОЛНОВЫХ АБЕРРАЦИЙ ЛИНЗ И ОБЪЕКТИВОВ | 1991 |
|
RU2025691C1 |
| ОФТАЛЬМОЛОГИЧЕСКИЙ ДАТЧИК ВОЛНОВОГО ФРОНТА, ДЕЙСТВУЮЩИЙ В РЕЖИМЕ ПАРАЛЛЕЛЬНОГО ОТБОРА И СИНХРОННОГО ДЕТЕКТИРОВАНИЯ | 2013 |
|
RU2600854C2 |
| Способ параллельной передачи оптической информации через многомодовое волокно | 1991 |
|
SU1800441A1 |
| СПОСОБ ФОРМИРОВАНИЯ И КОМПЕНСАЦИИ АСТИГМАТИЧЕСКОГО ВОЛНОВОГО ФРОНТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2726306C1 |
| Способ коррекции волновых фронтов | 1981 |
|
SU1015333A1 |
| Способ определения частоты и амплитуды модуляции фазы волнового фронта, создаваемого колебаниями мембраны клетки | 2020 |
|
RU2743973C1 |
Изобретение относится к области оптического приборостроения и касается способа измерения мод Цернике волнового фронта голографическим модовым датчиком волнового фронта. Способ измерения мод содержит итерационный процесс, который включает в себя увеличение диаметра измеряемого волнового фронта, от значения диаметра значительно меньшего максимального диаметра измеряемого волнового фронта до значения равного максимальному диаметру измеряемого волнового фронта. Способ включает в себя измерение амплитуды мод волнового фронта при разных значениях диаметра волнового фронта и уменьшение аберраций волнового фронта в каждом итерационном цикле корректором волнового фронта. Технический результат заключается в увеличении скорости измерений и количества измеряемых мод Цернике волнового фронта. 2 н. и 1 з.п. ф-лы, 6 ил., 2 табл.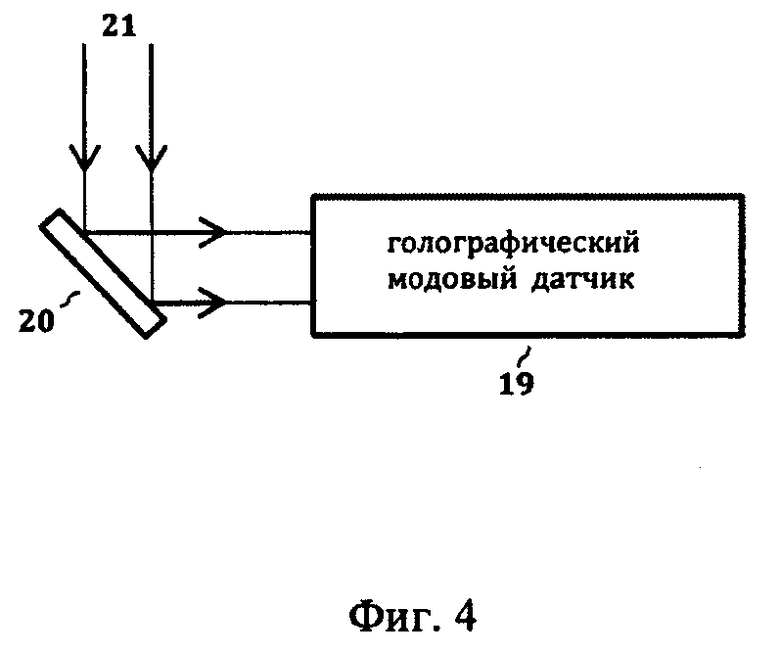
1. Способ измерения мод Цернике волнового фронта голографическим модовым датчиком волнового фронта, содержащий итерационный процесс измерения мод волнового фронта, отличающийся тем, что:
- итерационный процесс включает в себя увеличение диаметра измеряемого волнового фронта, от значения диаметра значительно меньшего максимального диаметра измеряемого волнового фронта до значения равного максимальному диаметру измеряемого волнового фронта;
- при первом цикле итерационного процесса голографическим модовый датчик измеряет амплитуды мод волнового фронта на первом, наименьшем, диаметре измеряемого волнового фронта, который достаточно мал, чтобы для данного диаметра априори известно, что при таком диаметре волнового фронта аберрации достаточно малы, чтобы могли быть измерены амплитуды одной или нескольких первых мод Цернике;
- на первом диаметре волнового фронта аберрации волнового фронта уменьшаются корректором волнового фронта на величины равные измеренным амплитудам мод;
- голографический модовый датчик, после уменьшения аберраций волнового фронта, измеряет на первом диаметре волнового фронта амплитуды ранее измеренных мод;
- амплитуда каждой моды на первом диаметре волнового фронта находится как сумма амплитуды моды измеренной до уменьшения аберраций и амплитуды моды измеренной после уменьшения аберраций волнового фронта;
- при втором цикле итерационного процесса по найденным амплитудам мод на первом диаметре волнового фронта, рассчитывают приближенные значения амплитуд мод на втором диаметре волнового фронта, для каждой моды расчетное приближенное значение ее амплитуды на втором диаметре волнового фронта находится как значение амплитуды моды найденное на первом диаметре волнового фронта умноженное на отношение второго диаметра к первому диаметру, возведенное в степень равную степени полинома, описывающего данную моду;
- второй диаметр измеряемого волнового фронта определяется из условия его достаточно малого увеличения по сравнению с первым диаметром измеряемого волнового фронта, при котором расчетные приближенные значения амплитуд мод близки к их фактическим значениям;
- на втором диаметре волнового фронта амплитуды аберраций волнового фронта уменьшаются корректором волнового фронта на величины равные расчетным приближенным значениям амплитуд;
- голографический модовый датчик, после уменьшения аберраций волнового фронта, измеряет на втором диаметре волнового фронта амплитуды мод ранее измеренных на первом диаметре волнового фронта;
- амплитуда каждой моды на втором диаметре волнового фронта находится как сумма расчетного приближенного значения амплитуды моды и амплитуды моды измеренной голографическим модовым датчиком;
- на втором диаметре волнового фронта могут измеряться амплитуды нескольких следующих мод Цернике, не измеренных на первом диаметре волнового фронта, при этом продолжается измерение амплитуд мод на первом диаметре волнового фронта;
- при третьем цикле итерационного процесса по найденным амплитудам мод на втором диаметре волнового фронта, рассчитывают приближенные значения амплитуд мод на третьем диаметре волнового фронта, для каждой моды расчетное приближенное значение ее амплитуды на третьем диаметре волнового фронта находится как значение амплитуды моды найденное на втором диаметре волнового фронта умноженное на отношение третьего диаметра волнового фронта ко второму диаметру, возведенное в степень равную степени полинома, описывающего данную моду;
- третий диаметр измеряемого волнового фронта определяется из условия его достаточно малого увеличения по сравнению со вторым диаметром измеряемого волнового фронта, при котором расчетные приближенные значения амплитуд мод близки к их фактическим значениям;
- на третьем диаметре волнового фронта амплитуды аберраций волнового фронта уменьшаются корректором волнового фронта на величины равные расчетным приближенным значениям амплитуд;
- голографический модовый датчик, после уменьшения аберраций волнового фронта, измеряет на третьем диаметре волнового фронта амплитуды мод ранее измеренных на втором диаметре волнового фронта;
- амплитуда каждой моды на третьем диаметре волнового фронта находится как сумма расчетного приближенного значения амплитуды моды и амплитуды моды измеренной голографическим модовым датчиком;
- на третьем диаметре волнового фронта могут измеряться амплитуды нескольких следующих мод Цернике, не измеренных на втором диаметре волнового фронта, при этом продолжается измерение амплитуд мод на первом и втором диаметрах волнового фронта;
- итерационный процесс продолжается подобным образом при увеличении диаметра измеряемого волнового фронта;
- при последнем N-м цикле итерационного процесса по амплитудам мод найденным на N-1 диаметре волнового фронта рассчитываются приближенные значения амплитуд мод на максимальном, N-м диаметре измеряемого волнового фронта, для каждой моды приближенное значение ее амплитуды на N-м диаметре находится, как значение амплитуды моды измеренное на (N–1)-м диаметре умноженное на отношение N-го диаметра к N-1 диаметру, возведенное в степень равную степени полинома, описывающего данную моду;
- значение (N-1)-го диаметра волнового фронта определятся из условия его достаточно малого уменьшения по сравнению с N-м диаметром, при котором расчетные приближенные значения амплитуд мод близки к их фактическим значениям;
- на N-м диаметре волнового фронта корректор волнового фронта уменьшает амплитуды мод волнового фронта на величины равные расчетным приближенным значениям мод, что завершает итерационный процесс;
- голографический модовый датчик волнового фронта измеряет амплитуды мод на N-м диаметре волнового фронта, на котором могут измеряться несколько следующих мод Цернике, не измеренных на (N-1)-м диаметре, при этом продолжается измерение амплитуд мод на всех меньших диаметрах волнового фронта;
- корректор волнового фронта уменьшает аберрации волнового фронта на N-м диаметре волнового фронта на величины равные измеренным амплитудам мод на N-м диаметре волнового фронта;
- если голографический модовый датчик, оказывается неспособным выполнить измерения амплитуд мод на одном из диаметров волнового фронта, итерационный процесс возобновляется, начиная с наибольшего диаметра волнового фронта на котором амплитуды мод измеряются.
2. Способ измерения мод Цернике волнового фронта по п.1, отличающийся тем, что в итерационном процессе измерения мод волнового фронта один из диаметров измеряемого волнового фронта составляет 0,816-ю часть от максимального N-го диаметра волнового фронта.
3. Устройство для измерения мод волнового фронта, содержащее корректор волнового фронта и расположенный за ним голографический модовый датчик волнового фронта, содержащий объектив, рассеиватель, диаметр которого равен диаметру измеряемого волнового фронта, расположенный в передней фокальной плоскости объектива; голограммы, расположенные в задней фокальной плоскости объектива, предварительно записанные на разных участках регистрирующей среды с использованием диффузной опорной волны, выходящей из объектива и плоских объектных волн, падающих на регистрирующую среду под двумя разными углами, для каждой моды, измеряемой датчиком волнового фронта, записаны две голограммы, одна из которых записана с опорной волной возникающей, когда на рассеиватель падает волна с положительной амплитудой моды, другая голограмма записана с опорной волной возникающей, когда на рассеиватель падает волна с отрицательной амплитудой моды; поляризатор, установленный за рассеивателем, поляризующий излучение в направлении перпендикулярном к плоскости содержащей опорные и объектные волны голограмм; объективы, расположенные на пути распространения восстановленных объектных волн голограмм, микродиафрагмы установленные в задних фокальных плоскостях объективов, фотодиоды, установленные за микродиафрагмами, отличающийся тем, что:
- голограммы датчика записаны при различных диаметрах волны падающей на рассеиватель, диаметр волны принимает ряд значений от диаметра значительно меньшего диаметра рассеивателя до диаметра равного диаметру рассеивателя;
- для изменения диаметра волны падающей на рассеиватель, используется диафрагма переменного диаметра, установленная перед рассеивателем при записи голограмм.
| В.В | |||
| Орлов "Голографический модовый датчик волнового фронта с увеличенным числом измеряемых мод", КВАНТОВАЯ ЭЛЕКТРОНИКА, т | |||
| Способ очищения сернокислого глинозема от железа | 1920 |
|
SU47A1 |
| Радиотрансляция | 1921 |
|
SU773A1 |
| УСТРОЙСТВО для ИССЛЕДОВАНИЯ свинины | 0 |
|
SU178706A1 |
| US 7645972 B2, 12.01.2010 | |||
| WO 2006090320 A1, 31.08.2006. | |||

