Изобретение относится к области гидрометрии и океанографии, методам измерения высоты границы раздела между жидкостью и воздухом, методам измерения уклонов поверхности раздела, например, измерению высоты волнения, спектра волнения, спектра уклонов.
Известен способ определения высоты границы раздела воздух-жидкость и уклонов поверхности с помощью струнного волнографа [1]. В нем измеряют электрическое сопротивление вертикально расположенных струн, частично погруженных в жидкость. При изменении уровня жидкости сопротивление погруженной части струны уменьшается, и по общему сопротивлению каждой струны определяют высоту границы раздела. Недостатком метода является невысокая точность измерений из-за изменения сопротивления струны при ее смачивании, за счет осаждения солей и водорослей на струне и электроде, за счет флуктуаций сопротивления жидкости, из-за емкостных свойств электрической цепи. Другим способом является измерение углового положения бликов солнца, отраженных от поверхности с высоты самолета [2]. Но этот метод не является всепогодным, и сложен в реализации. Возможны измерения уклонов по отраженному лазерному излучению [3]. Недостатком этого способа является уход блика из апертуры приемной системы при даже небольших уклонах, что не позволяет измерять уклоны уже при умеренном волнении. В способе, описанном в [4] проводятся измерения высоты волнения водной поверхности относительно ее равновесного состояния и измерение уклонов поверхности. В методе три лазерных луча направляют вертикально вдоль оси Z, рассеянное излучение регистрируют с помощью цифровой видеокамеры, границы засветки лазерных лучей на цифровой матрице с учетом пространственной калибровки переводят в аппликаты волнения. При этом одновременное измерение аппликат в трех точках обеспечивает возможность регистрации уклонов в двух направлениях и получения двумерного распределения уклонов. Недостатком является фиксированный масштаб положения координат трех точек, а также суммирование изображения за время экспозиции одного кадра, что приводит к размытию границы засветки и ухудшению точности измерений.
Наиболее близким аналогом, (прототипом) является измерение аппликат волновой поверхности с помощью лазерного луча или лазерного ножа или двух ортогональных лазерных ножей, направляемых вдоль вертикальной оси, и регистрации одиночной или протяженной метки на поверхности с помощью цифровой видеокамеры [5]. При этом проводится пересчет положения меток на видеокадре в пространственные координаты с дальнейшим вычислением аппликат и уклонов поверхности. Недостатком метода является суммирование изображения метки за время выдержки кадра, что приводит к размыванию точек по высоте. При скоростях вертикального перемещения волны 0.6 м/с (что происходит уже при ветре 10 м/с) и длительности выдержки 1/40 с размывание составит 15 мм, что приводит к низкой точности измерений как аппликат в отдельных точках поверхности, так и уклонов.
Технический результат предложенного способа заключается в многократном повышении точности и надежности измерений высот (аппликат) волновой поверхности вдоль линий сканирования, уклонов в каждой точке в выбранных направлениях и двумерных уклонов, усредненных на различных пространственных масштабах (от единиц миллиметра до метров). При этом повышается пространственное разрешение и удается регистрировать не только гравитационно-капиллярные, но и капиллярные волны.
Для достижения технического результата в предложенном способе лазерные лучи направляют вдоль вертикальной оси Z, рассеянное излучение регистрируют с помощью цифровой видеокамеры, границы засветки лазерных лучей на цифровой матрице с учетом калибровки переводят в аппликаты волнения.
Новым в способе является то, что лазерные лучи сканируют по поверхности с частотой видеосъемки, два луча синхронно сканируют во взаимно перпендикулярных направлениях, в другом варианте добавляется третий луч, который синхронно с первыми двумя сканирует на некотором расстоянии от первых двух, а мгновенный профиль поверхности вдоль траектории сканирования двух или трех лучей рассчитывают с учетом скорости сканирования и скорости вертикального перемещения высоты поверхности в каждой точке траекторий. Точность измерений повышается за счет того, что при сканировании время освещения каждой точки поверхности и размытие изображения за счет ее движения уменьшается в десятки раз. Надежность измерений повышается за счет повышения отношения сигнал/шум на видеокадрах. Кроме того, при использовании трех синхронно сканирующих лучей на каждом двойном видеокадре всегда есть три синхронные точки, на которых можно построить мгновенный треугольник и по стандартной процедуре определить его двумерный уклон в пространстве. При этом на каждом видеокадре можно найти множество таких треугольников различного масштаба (от мм до максимального расстояния между точками лучей). Учет скорости сканирования лучей и скорости вертикального перемещения высоты поверхности в каждой точке траекторий позволяет привести профиль поверхности к единому моменту времени, равному моменту начала сканирования, т.е. получить мгновенный профиль поверхности. Анализ серии видеокадров позволяет получить временную зависимость высот и уклонов, что позволяет рассчитать пространственные и временные характеристики волнения. Использование интерференционных светофильтров при регистрации лазерного излучения на камеры обеспечит селекцию только полезного излучения лазеров и снизит фоновое излучение. Это позволит проводить измерения в любое время суток.
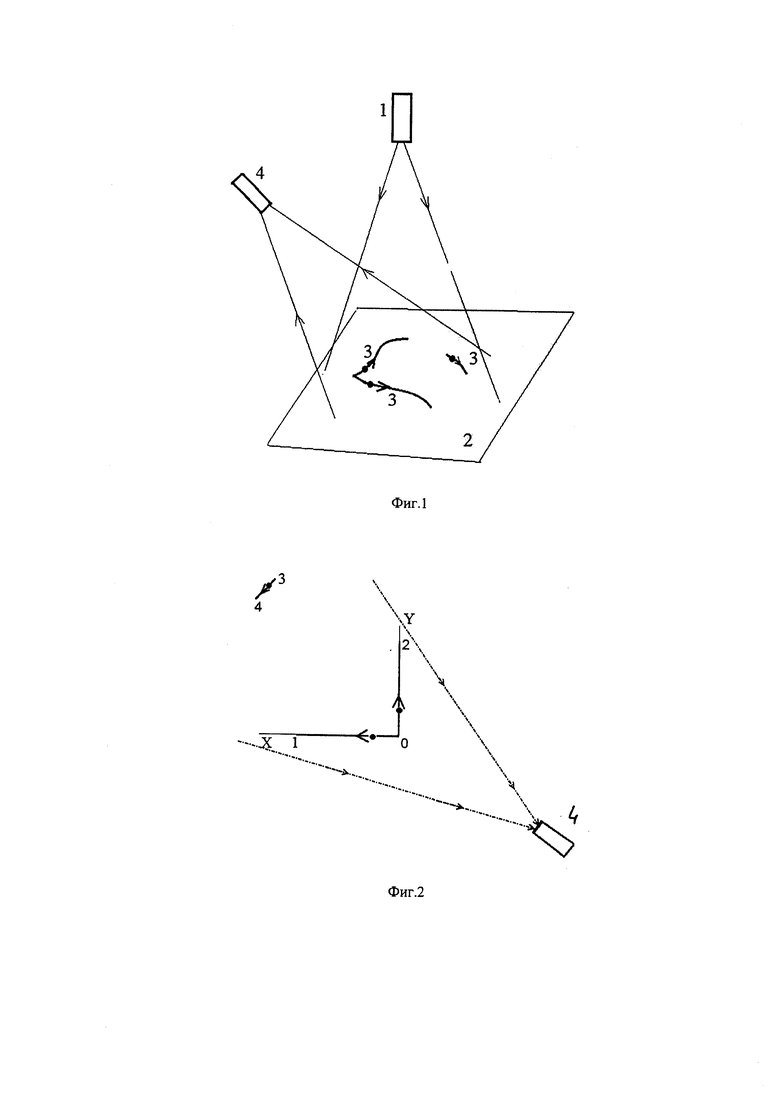
На фиг. 1 показана схема оптических измерений. Лазерная система 1 производит сканирование водной поверхности 2 лучами 3. Два луча синхронно сканируют во взаимно ортогональных направлениях X и Y, а третий синхронно с первыми двумя сканирует на некотором расстоянии от первых двух лучей под углом 45° к осям X и Y. Видеокамера 4 находится в плоскости составленной биссектрисой между осями X и Y и вертикальной осью Z. В любой момент времени три точки лучей создают треугольник, размеры которого меняются в течение цикла сканирования.
На фиг. 2. представлена схема сканирования поверхности двумя или тремя лазерными лучами с частотой работы видеокамеры. Первый луч по оси X (траектория 0-1), второй по оси Y (траектории 0-2), а третий по траектории 3-4. Видеокамера 4 находится в плоскости составленной биссектрисой между осями X и Y и вертикальной осью Z.
На фиг. 3 представлен видеокадр одиночного лазерного луча, вошедшего в морскую воду. Верхняя точка четко регистрируется и соответствует границе раздела вода воздух. При сканировании с частотой кадров верхняя кромка прописывает точную линию мгновенного профиля поверхности без усреднения за время выдержки.
В способе прототипе происходит непрерывное освещение поверхности ножевым лучом. Учитывая, что скорость вертикального перемещения точек поверхности по оси Z может достигать 0.5-2 м/с, получается, что за время выдержки, например 0.02 с, освещенная лазерным ножом поверхность сместится по вертикали на 10-40 мм, а точность регистрации высоты в каждой точке будет иметь примерно такой же масштаб. Это не позволит получить уклоны за счет регистрации высоты поверхности в соседних пикселах, которые располагаются на расстоянии порядка 1-10 мм. Следовательно, способ-прототип будет испытывать затруднения даже при регистрации гравитационно капиллярных волн. В отличие от прототипа в предложенном способе размывание границы поверхности на видеокадрах не происходит, поскольку время освещения каждой точки поверхности (пиксела матрицы) более чем в 100 раз меньше, чем длительность выдержки. Например, при протяженности развертки 600 мм, разрешении камеры 1 мм и диаметре луча 2 мм длительность освещения одного пиксела составит 1/300 от длительности выдержки. При частоте сьемки 25 кадров в секунду и выдержке 1/40 с, время освещения пиксела составит 1/12000 с. При этом смещение поверхности раздела даже при вертикальной скорости поверхности 2 м/с не превысит 0,17 мм, а разрешение по горизонтальным координатам X,Y будет близко к размеру пиксела, т.е. 1 мм. Это позволит регистрировать не только гравитационно капиллярные волны, но и чисто капиллярные составляющие волнения.
В предложенном способе происходит выигрыш не только в пространственном разрешении, но в отношении сигнал/шум. Действительно, в прототипе лазерный луч ножевой, поэтому освещенность информационных пикселов на границе раздела пропорциональна энергии лазера, излученной за время выдержки Wизл поделенной на число освещаемых пикселов на границе раздела. При длительности выдержки равной 1/40 с и типичной скорости вертикального движения волны 0.6 м/с размытие границы составит 15 мм. Если длина ножевого луча составит 600 мм, а размер одного пиксела 1 мм2, то световая энергия, приходящаяся на пиксел составит Wизл/(600*15). В предложенном решении при сканировании поверхности лучом той же горизонтальной протяженности в направлении вертикали будет освещаться только один пиксел на границе раздела (смещение границы составит 0.1 мм) и световая энергия, приходящаяся на информационный пиксел на границе поверхности составит Wизл/(600*1), т.е. возрастет в 15 раз. Это повышает отношение сигнал/шум на информационных пикселах граница раздела и повышает надежность измерений, позволяет автоматизировать процесс обработки и проводить онлайн измерения параметров волнения.
При падении лазерного луча на поверхность четко визуализируется верхняя точка на границе раздела, ниже которой происходит засветка за счет рассеяния луча, проникшего в воду, как на фотографии фиг. 3. При сканировании лазерным лучом вдоль некоторой прямой будет визуализироваться четкая верхняя граница поверхности с размытием, не превышающим доли миллиметра, а ниже произойдет засветка нижнего полупространства. При сканировании поверхности в двух ортогональных направлениях верхние границы лучей будут регистрироваться от 0 точки их пересечения вдоль линий 0-1 и 0-2, В альтернативном варианте, при сканировании тремя лучами будет регистрироваться также верхняя граница лучей 3-4.
Важным действием является учет смещения поверхности раздела за время перемещении луча по поверхности и приведение высоты границы раздела к единому моменту времени, равному моменту начала развертки. Для этого мгновенный профиль поверхности вдоль траектории сканирования двух или трех лучей рассчитывают с учетом скорости сканирования и скорости вертикального перемещения высоты поверхности в каждой точке траектории.
Для лучшей избирательности длина волны у третьего луча может выбираться отличной от первых двух и регистрироваться на другом канале видеокамеры, не меньшая регистрация первых двух лучей.
Использования интерференционных светофильтров также существенно уменьшит фоновое излучение и позволит проводить измерения в любое время суток.
Использование предложенного метода позволяет одновременно, с временной точностью до 1/1000 с получить значения аппликат в любых двух или трех выбранных точках на лучах поверхности, фиг. 2, с пространственной точностью до 1 пиксела (1 мм). По этим значением по стандартной методике определяется двумерный мгновенный уклон поверхности, усредненный на выбранном треугольнике, фиг. 2. Обработка видеоряда из последовательности кадров позволяет получать двумерное распределение уклонов на масштабе выбранного треугольника. При синхронном сканировании размеры треугольников плавно изменяются от десятков сантиметров до единиц миллиметров, что позволяет получать пространственно временные характеристики волнения с высокой точностью и в большом интервале масштабов.
Пример реализации способа при использовании двух ортогональных лучей поясняется на фиг. 1. Лазерная система 1 устанавливается стационарно на выносной консоли на морской платформе на высоте 4 м над уровнем воды и зондирует вниз вдоль ось Z. При этом формируются два ортогонально сканирующих лазерных луча, которые синхронно и равномерно по времени отклоняются по углу так, чтобы длина освещенных отрезков 0-1 и 0-2 на поверхности моря составляла по 0.6 м. Видеокамера 4 находится в плоскости, составленной биссектрисой между осями X и Y и осью Z, размещается на платформе на высоте 4 м ориентируется на освещенные участки под средним углом 50° к вертикали, фиг. 1.
Частота видеокамер синхронизуется с частотой сканирования лучей. При этом на каждом i-том кадре камеры 4 будет зарегистрированы верхние границы поверхности на траекториях 0-1 и 0-2, начиная от точки 0 пересечения лучей до точек 1 и 2, фиг. 2. Матрица видеокамеры калибруются по стандартной методике, описанной, например, в прототипе [5]. В результате для каждого i-того кадра и для каждой j-той дискретной координаты xj, по треку границы 0-1 на видеокамере можно поставить в соответствие координаты Xj и Zj в пространстве, т.е. найти зависимость Zi,j(Xj), а для каждого i-того кадра и для каждой k-той дискретной координаты yk по треку границы 0-2 можно определить координаты Yk и Zk в пространстве, т.е. найти зависимость Zi,k(Yk). Затем, вычисляется нулевой уровень невозмущенной поверхности в каждой точке j и k как среднее по большому числу кадров N:  и
и  и вычисляются значения высот поверхности (аппликаты) в каждой точке
и вычисляются значения высот поверхности (аппликаты) в каждой точке  и
и 
В альтернативном решении третий трек располагается перпендикулярно биссектрисе угла X0Y на расстоянии 1 м от точки пересечения ортогональных лучей. При этом его длина составляет, например, 0,2 м. Аппликаты на третьем треке  определяются аналогичным образом, они служат для расчета двумерных уклонов большого масштаба, фиг. 2.
определяются аналогичным образом, они служат для расчета двумерных уклонов большого масштаба, фиг. 2.
Следует учесть, что, за время сканирования поверхность успевает смещаться по вертикали. Получается, что высота поверхности (аппликаты ξi) в разных точках линии сканирования измеряются в различные моменты времени. Поэтому проводится процедура приведения всех высоты в i-том кадре к единому моменту времени, ti равному началу сканирования в i-том кадре. Для этого требуется учесть смещение высот в каждой точке за время движения луча по траектории. Это учитывается следующим образом. Рассмотрим это учет на примере траектории 0-1 по оси X.
• Угловая скорость сканирования  поддерживается постоянной, при этом скорость νx,i движения луча по поверхности на i-том кадре составит величину:
поддерживается постоянной, при этом скорость νx,i движения луча по поверхности на i-том кадре составит величину:
где Z0 - высота лазера 1 над невозмущенной поверхностью,  - средняя высота поверхности на i-том кадре, М - число дискретных точек по оси X (на треке 0-1).
- средняя высота поверхности на i-том кадре, М - число дискретных точек по оси X (на треке 0-1).
• Время перемещения луча по координате X от начала скана Xi,1 до точки Xi,j (задержка):
Δtзад,i,j=(Xi,j-Xi,1)/νx,i
• Скорость вертикального смещения каждой точки Xi,j вычисляется из сравнения аппликат в двух соседних кадрах:
νz,i,j=(ξi+1,j-ξi,j)/τповт, где τповт - период повторения кадров.
• В результате получаем  - «мгновенный» профиль высоты поверхности вдоль оси X, приведенный к моменту начала развертки ti, в котором учитывается вертикальное смещение точек за время развертки:
- «мгновенный» профиль высоты поверхности вдоль оси X, приведенный к моменту начала развертки ti, в котором учитывается вертикальное смещение точек за время развертки:

Аналогично рассчитывается мгновенный профиль поверхности по второй ортогональной траектории сканирования 0-2 и по третьей траектории сканирования 3-4.
Одномерные уклоны поверхности - это тангенс угла наклона нормали к поверхности в каждой точке траектории. Для уклонов по оси X они находятся по обычной формуле:

Аналогично определяют одномерные уклоны поверхности по другим направления сканирования.
Двумерные уклоны поверхности вычисляют по стандартной методике по значениям мгновенных высот в трех любых точках поверхности раздела, не лежащих на одной прямой. При сканировании по двум ортогональным направлениям три точки треугольника можно выбирать на участках 0-1 и 0-2, изменяя масштаб от единиц миллиметров до размеров  При альтернативном варианте с тремя лучами верхний масштаб треугольников существенно возрастает.
При альтернативном варианте с тремя лучами верхний масштаб треугольников существенно возрастает.
Статистическая обработка серии видеокадров позволяет получить временные зависимости высот и уклонов водной поверхности.
В результате применения предложенного способа удается с высокой временной и пространственной точностью получить как временные, так и пространственные зависимости для высот водной поверхности и уклонов поверхности в диапазоне масштабов от единиц миллиметров до метров, что необходимо для широкого круга научных и прикладных задач. При этом метод является дистанционным, практически всепогодным, не приводит к возмущению измеряемой среды, не подвержен влиянию ветра, волн и течения, позволяет проводить автоматизацию обработки и регистрировать волновые параметры в реальном масштабе времени.
Литература
1. Авторское свидетельство СССР №513250, МКИ G01C 13/00. Волнограф, А.К. Куклин. -Заявлено 23.01.1975. Опубл. 18.05.1976.
2. Сох С., Munk W. Slopes of the sea surface deduced from photographs of sun glitter, J. Optical. Soc. America, 1954, Vol.44, No. 11, pp.838-850.
3. Запевалов A.C. Статистические модели морской поверхности в задачах рассеяния акустического и электромагнитного излучения // Дисс. … докт. физ.-мат.наук. Севастополь: Морской гидрофизический институт НАН Украины, 2008. 290 с.
4. А. Александров, Э. Вайндруж, В. Легеза «Светолучевой многоканальных волнограф», стр. 205-209 в сб. «Неконтактные методы измерения океанографических параметров», М.: Гидрометеоиздат, 1983.
5. Караев В.Ю., Мешков Е.М. Способ определения угла наклона и высоты волнения водной поверхности относительно ее равновесного состояния. Патент РФ №2 448 324 G01C 13/00.

Изобретение относится к области гидрометрии и океанографии, методам измерения высоты границы раздела между жидкостью и воздухом, методам измерения уклонов поверхности раздела, например измерению высоты волнения, спектра волнения, спектра уклонов. Заявлен способ измерения углов наклона и высоты волнения водной поверхности относительно ее равновесного состояния, в котором лазерные лучи направляют вдоль вертикальной оси Z, рассеянное излучение регистрируют с помощью цифровой видеокамеры, а границы засветки лазерных лучей на цифровой матрице с учетом калибровки переводят в аппликаты волнения. Лазерные лучи сканируют по поверхности с частотой видеосъемки, два луча синхронно сканируют во взаимно перпендикулярных направлениях X и Y, или к двум перпендикулярным лучам добавляется третий луч, который синхронно с первыми двумя сканирует на некотором расстоянии от первых двух, а мгновенный профиль поверхности вдоль траектории сканирования двух или трех лучей рассчитывают с учетом скорости сканирования и скорости вертикального перемещения высоты поверхности в каждой точке траекторий. Технический результат - многократное повышение точности и надежности измерений высот (аппликат) волновой поверхности вдоль линий сканирования, уклонов в каждой точке в выбранных направлениях и двумерных уклонов, усредненных на различных пространственных масштабах (от единиц миллиметра до метров), за счет чего повышается пространственное разрешение и удается регистрировать не только гравитационно-капиллярные, но и капиллярные волны. 2 з.п. ф-лы, 3 ил.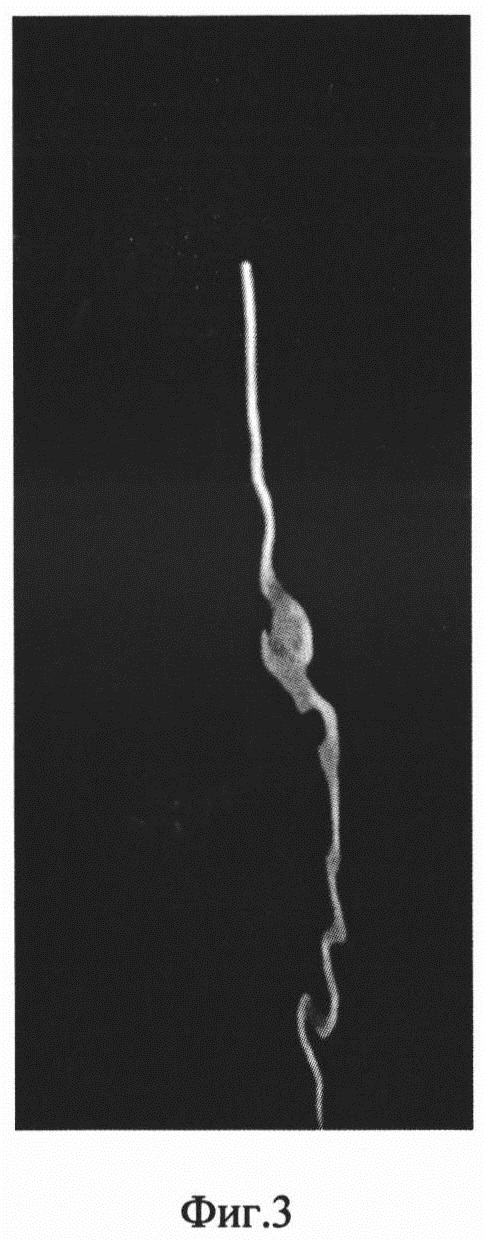
1. Способ измерения углов наклона и высоты волнения водной поверхности относительно ее равновесного состояния, в котором лазерные лучи направляют вдоль вертикальной оси Z, рассеянное излучение регистрируют с помощью цифровой видеокамеры, границы засветки лазерных лучей на цифровой матрице с учетом калибровки переводят в аппликаты волнения, отличающийся тем, что лазерные лучи сканируют по поверхности с частотой видеосъемки, два луча синхронно сканируют во взаимно перпендикулярных направлениях X и Y, или к двум перпендикулярным лучам добавляется третий луч, который синхронно с первыми двумя сканирует на некотором расстоянии от первых двух, а мгновенный профиль поверхности вдоль траектории сканирования двух или трех лучей рассчитывают с учетом скорости сканирования и скорости вертикального перемещения высоты поверхности в каждой точке траекторий.
2. Способ по п. 1, отличающийся тем, что длины волн лазерных лучей различны.
3. Способ по п. 1, отличающийся тем, что при регистрации рассеянного излучения используют интерференционные фильтры.
| СПОСОБ ОПРЕДЕЛЕНИЯ УКЛОНОВ ВОДНОЙ ПОВЕРХНОСТИ | 2014 |
|
RU2598400C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВ НАКЛОНА И ВЫСОТЫ ВОЛНЕНИЯ ВОДНОЙ ПОВЕРХНОСТИ ОТНОСИТЕЛЬНО ЕЕ РАВНОВЕСНОГО СОСТОЯНИЯ | 2011 |
|
RU2474788C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВ НАКЛОНА И ВЫСОТЫ ВОЛНЕНИЯ ВОДНОЙ ПОВЕРХНОСТИ ОТНОСИТЕЛЬНО ЕЕ РАВНОВЕСНОГО СОСТОЯНИЯ | 2009 |
|
RU2410643C1 |
| Способ измерения параметров морской поверхности | 1990 |
|
SU1768964A1 |
| US 4277167 A, 07.07.1981 | |||
| JP 4798363 B2, 19.10.2011. | |||

