Изобретение относится к области океанографических измерений, в частности к способам измерения углов наклона и высоты волнения водной поверхности, и может быть использовано в метеорологии для повышения точности долгосрочных прогнозов погоды и в океанологии для изучения волновых процессов на поверхности океана.
Известен способ измерения угла наклона и высоты волнения водной поверхности относительно ее равновесного состояния, в котором используется одна приемная прозрачная диффузионная пластина (пат. US рег.№ H503 МПК7 G01C 13/00, публ. 02.09.1988 "Wave surface characterization"). Способ заключается в том, что лазерный луч с помощью вспомогательного зеркала направляют вертикально вниз вдоль оси Z в выбранную точку водной поверхности. Отраженную от водной поверхности часть лазерного луча визуализируют в виде метки на приемной прозрачной диффузной пластине, расположенной в плоскости XY над водной поверхностью. Одновременно с этим с помощью цифровой видеокамеры с растровым просмотром фиксируют величины отклонений ΔX1 и ΔY1 упомянутой метки на приемной прозрачной диффузной пластине относительно нулевой отметки, при этом измеренные отклонения ΔX1 и ΔY1 упомянутой лазерной метки используют для восстановления (вычисления) величин мгновенных значений углов наклона αх и αу водной поверхности в выбранной точке. Для измерения высоты волнения используют струнный емкостной датчик. Этот способ имеет несколько существенных недостатков:
1) контактный датчик возмущает водную поверхность, генерируя волны при набегании на струну волны, и таким образом искажает волнение, т.е. теряется главное преимущество бесконтактного метода;
2) измерения высоты волнения проводятся не в том месте, где измеряется наклон, т.е. они не являются синхронными по времени и пространству и не могут обрабатываться совместно. Это уменьшает восстанавливаемый объем информации о волнении, т.е. теряется информация о взаимной корреляции параметров волнения;
3) струнные емкостные датчики являются достаточно инерционными и обычно не регистрируют волнение с частотой выше 20-30 Гц. Кроме того, измерения искажаются за счет эффектов смачивания, загрязнения струны;
4) наличие вспомогательного зеркала приводит к невозможности измерения небольших наклонов водной поверхности, т.к. отраженный от нее луч не может попасть на регистрирующую пластину из-за наличия вспомогательного зеркала.
Применяемая в способе синхронизация излучения и приема сигналов существенно снижает вероятность «ложных» срабатываний или неоднозначность определения координат, связанных с тем, что на приемной прозрачной диффузной пластине будет регистрироваться засветка от других источников света, например от солнца. Однако она не может полностью устранить этот эффект.
Наиболее близким к заявляемому является способ измерения углов наклона и высоты волнения водной поверхности относительно ее равновесного состояния, в котором используются две приемные прозрачные диффузные пластины (патент РФ №2410643, МПК7 G01C 13/00, публ. 30.06.2009), который выбран в качестве прототипа. В способе-прототипе лазерный луч направляют вдоль оси Z вертикально вверх из подводного положения через некоторую толщу воды и водную поверхность, углы наклона и высоту волнения которой требуется определять в месте выхода луча. Отклоненный водной поверхностью лазерный луч визуализируют в виде меток одновременно на первой и на второй приемных диффузных пластинах, установленных над водной поверхностью параллельно плоскости XY на заданном расстоянии Н2 друг от друга. С помощью цифровых видеокамер одновременно фиксируют величины отклонений упомянутых меток лазерного луча на первой ΔX1 и ΔY1 и на второй ΔX2 и ΔY2 приемных диффузных пластинах относительно нулевой отметки, после чего по одномоментно измеренным отклонениям ΔХ1, ΔХ2, ΔY1, ΔY2 меток лазерного луча по предлагаемому алгоритму синхронно восстанавливают (вычисляют) величины соответствующих мгновенных значений углов наклона αx и αу водной поверхности в выбранной точке и высоту h волнения водной поверхности в той же точке.
Недостатками способа-прототипа являются:
1. Использование для фиксирования величин отклонений меток лазерного луча на двух приемных диффузных пластинах соответственно двух цифровых видеокамер. Во-первых, работа цифровых видеокамер нуждается в дополнительной синхронизации. Во-вторых, на обработку изображений с двух цифровых камер тратится достаточно много времени. В-третьих, цифровая камера должна быть высокоскоростной с хорошим пространственным разрешением и поэтому она является достаточно дорогостоящим оборудованием.
2. Использование в способе-прототипе двух независимых приемных диффузных пластин требует параллельности их расположения, что требует достаточно длительной настройки даже в лабораторных условиях, в которых был реализован способ-прототип. Реализация же такой настройки в натурных условиях представляет существенные затруднения.
Задачей, на решение которой направлено настоящее изобретение, является разработка способа синхронного измерения высоты и наклонов волнения водной поверхности в одной точке, обладающего достаточным быстродействием, надежностью и простотой реализации в условиях натурных измерений.
Технический результат в разработанном способе измерения углов наклона и высоты h волнения водной поверхности относительно ее равновесного состояния достигается тем, что, как и в способе-прототипе, по крайней мере, один лазерный луч направляют вертикально вдоль оси Z из подводного положения через некоторую толщу воды и водную поверхность, угол наклона и высоту волнения которой измеряют в точке выхода луча из воды, отклоненный водной поверхностью лазерный луч визуализируют в виде метки на приемной прозрачной диффузной пластине, расположенной в плоскости XY над водной поверхностью на расстоянии H1, одновременно с этим с помощью цифровой видеокамеры фиксируют величины отклонений упомянутой метки на приемной прозрачной диффузной пластине ΔX1 и ΔY1 относительно нулевой отметки.
Новым в разработанном способе является то, что одновременно на упомянутой приемной прозрачной диффузной пластине также визуализируют в виде метки отклоненный лазерный луч, отраженный с помощью зеркала, установленного над упомянутой приемной прозрачной диффузионной пластиной параллельно ей на расстоянии Н2, с помощью цифровой видеокамеры фиксируют величины отклонений упомянутой метки ΔX2 и ΔY2 относительно нулевой отметки, после чего по одномоментно измеренным отклонениям ΔХ1, ΔХ2, ΔY1, ΔY2 синхронно восстанавливают (вычисляют) величины соответствующих мгновенных значений углов наклона αх и αу водной поверхности в выбранной точке и высоту h волнения водной поверхности в той же точке.
Таким образом, в разработанном способе, в отличие от прототипа, вместо второй приемной диффузной пластины используют ее мнимое изображение, полученное с помощью установленного на расстоянии Н2 над упомянутой первой прозрачной диффузной пластиной зеркала. Мнимое изображение параллельно первой прозрачной диффузной пластине и находится от первой пластины на расстоянии 2Н2, а вместо реального изображения метки лазерного луча на второй приемной пластине визуализируют ее мнимое изображение на упомянутой первой прозрачной диффузной пластине. При этом фиксацию величин отклонений ΔХ1, ΔХ2, ΔY1, ΔY2 упомянутых меток лазерного луча с помощью цифровой видеокамеры осуществляют на первой приемной прозрачной диффузной пластине.
Для нахождения координат меток на приемной диффузной пластине используют цифровую видеокамеру, соединенную с компьютером. Цифровая видеокамера позволяет записывать синхронно движение меток по приемной прозрачной диффузной пластине, а для нахождения координат меток используют специальную компьютерную программу обработки, разбивающую непрерывное видеоизображение на последовательность кадров и вычисляющую координаты меток в каждом кадре.
В первом частном случае реализации способа, например, в лабораторных условиях, когда нет ветра, целесообразно использовать максимально тонкую прозрачную диффузную пластину, например пленку, толщиной которой в расчетах можно пренебречь, что позволяет существенно упростить вычисление искомых величин.
Во втором частном случае реализации способа для определения генерального направления распространения волнения целесообразно вдоль оси Z вертикально вверх из подводного положения через некоторую толщу воды и водную поверхность направить не менее трех лазерных лучей разного цвета, разнесенных на требуемое расстояние друг от друга, а отклоненные водной поверхностью лазерные лучи визуализировать на упомянутой прозрачной диффузной пластине в виде меток разного цвета. При этом вычисление величин мгновенных значений углов наклона αx, αу и высоты h волнения водной поверхности в месте выхода каждого луча необходимо осуществлять параллельно и независимо друг от друга для каждого луча.
Изобретение поясняется чертежами.
На фиг.1 представлена схема измерения волнения водной поверхности в соответствии с п.1 формулы изобретения в плоскости XZ.
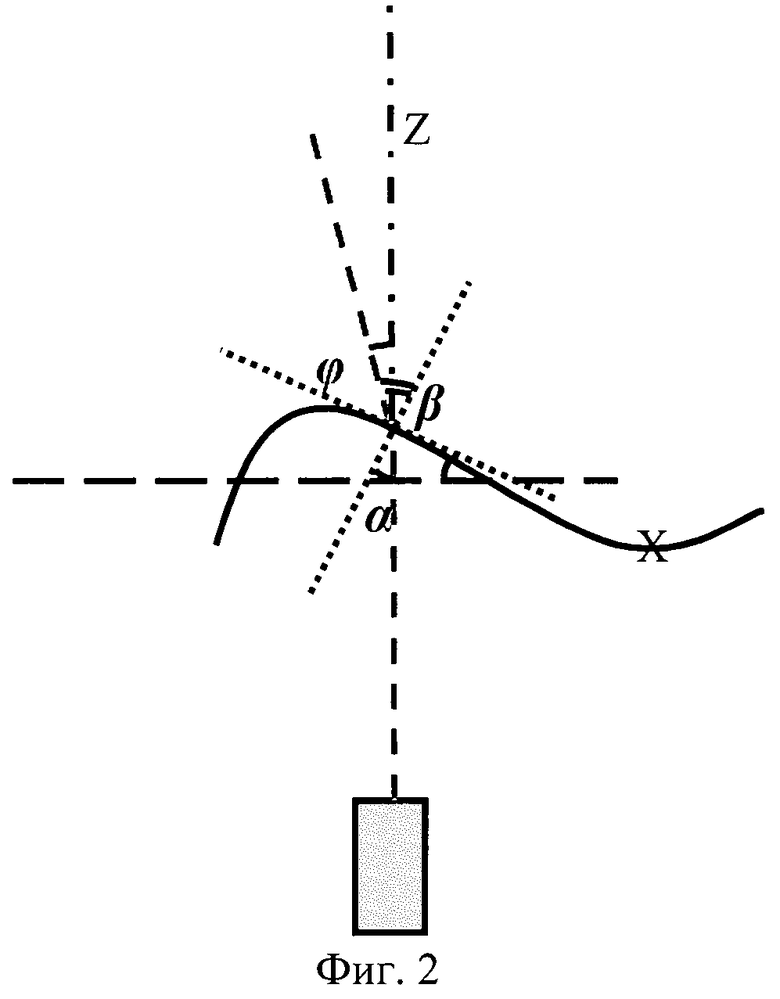
На фиг.2 представлена иллюстрация преломления лазерного луча взволнованной водной поверхностью.
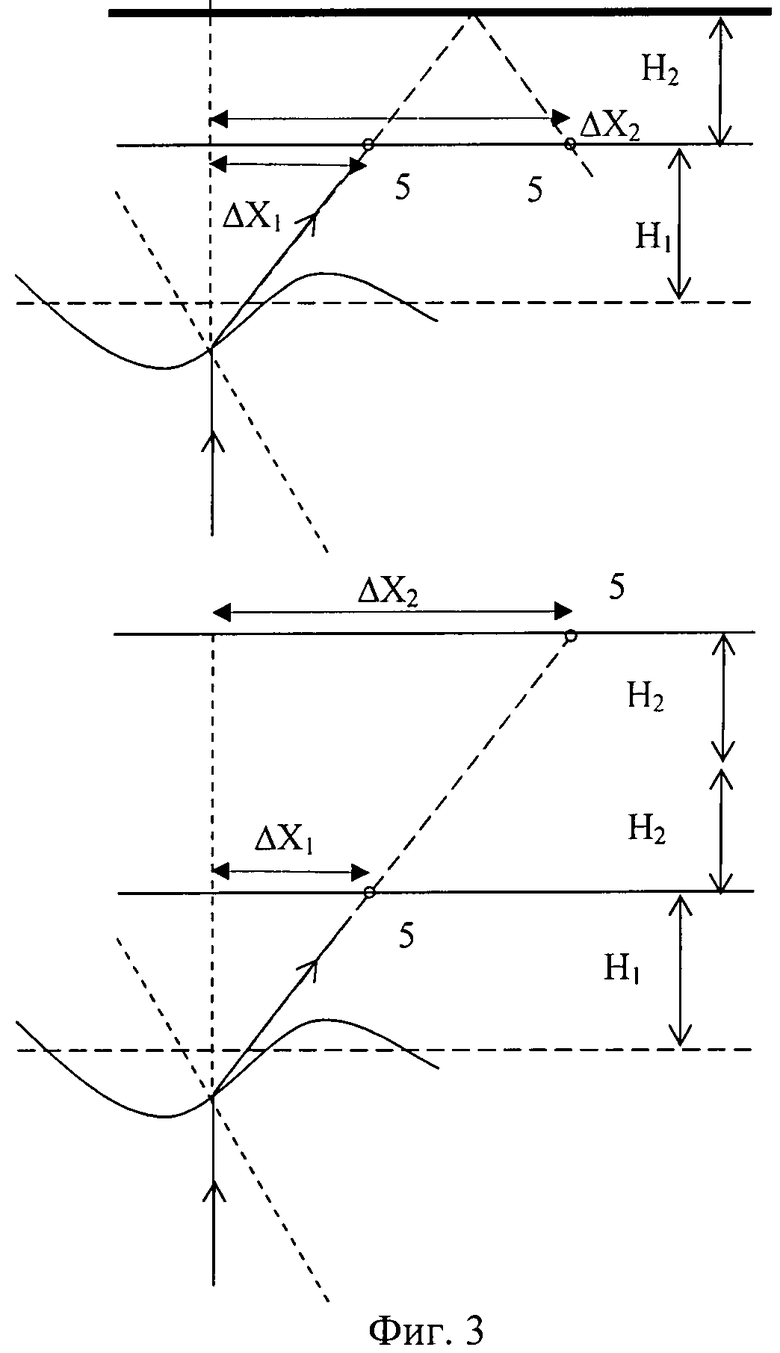
На фиг.3 проиллюстрировано отличие предлагаемой в заявляемом способе схемы измерений (вверху) от схемы измерений в способе-прототипе (внизу).
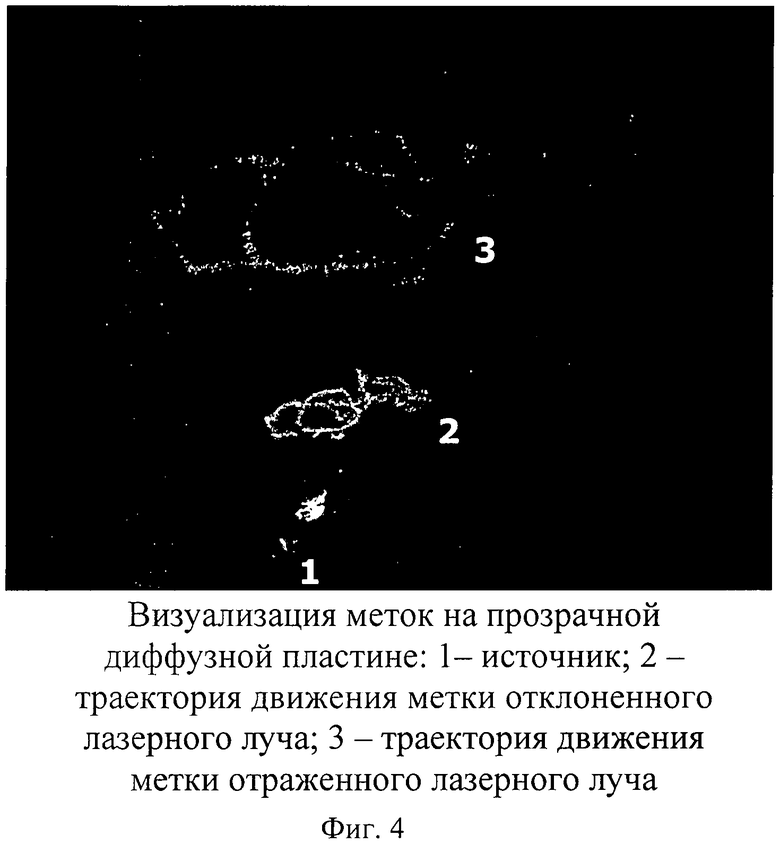
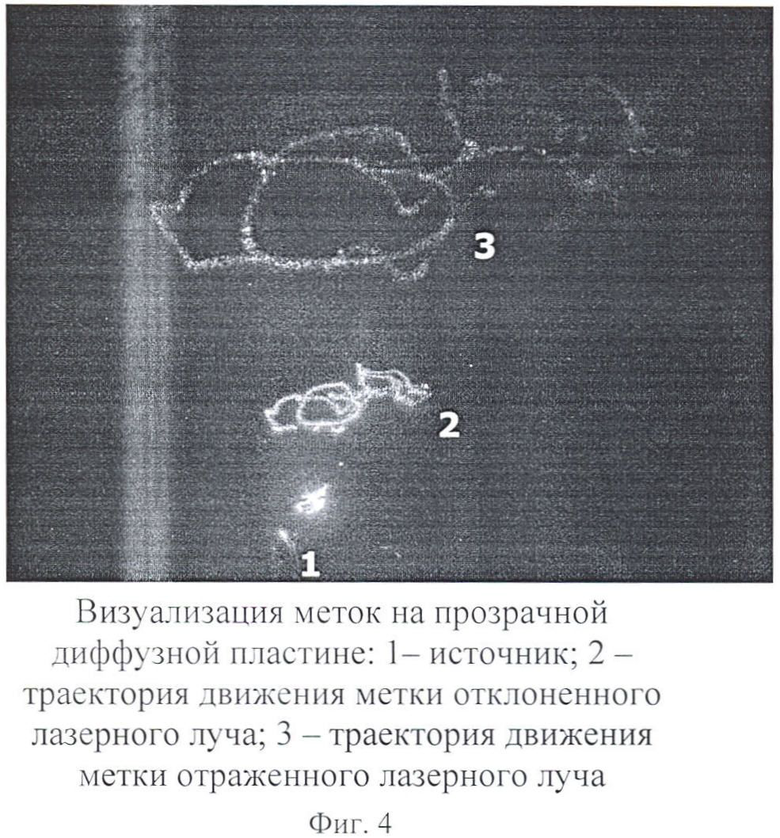
На фиг.4 представлена фотография траекторий движения меток лазерного луча на приемной прозрачной диффузной пластине при выполнении измерений в лабораторных условиях.
Устройство для реализации предлагаемого способа, представленное схематично на фиг 1, содержит лазер 1, расположенный под водой на глубине Н0 и установленный таким образом, что лазерный луч 2 выходит вертикально вверх. Проходя через взволнованную водную поверхность, лазерный луч 2 отклоняется от вертикального направления на угол φх и попадает на прозрачную диффузную пластину 3, расположенную в плоскости XY на высоте Н1 над водной поверхностью. В общем случае реализации изобретения прозрачная диффузная пластина 3 может иметь толщину Δ, например, может быть выполнена стеклянной с толщиной Δ. Расстояние Н1 измеряется от равновесного состояния жидкости. На высоте H2 от верхней плоскости прозрачной диффузной пластины 3 параллельно ей расположено зеркало 4.
Для «визуализации» точек прохождения (меток) лазерного луча 2 через стекло необходимо, чтобы одна из поверхностей прозрачной диффузной пластины 3 была шероховатой, чтобы обеспечивать диффузное рассеяние, и в то же время пропускала бы луч на зеркало 4. При прохождении лазерного луча 2 через пластину 3 и попадании его на зеркало 4 визуализация лазерного луча 2 на прозрачной диффузной пластине 3 осуществляется в виде меток 5 (см. фиг.1 и фиг.3).
Координату метки 5 на нижней стороне пластины 3 обозначим х1. Смещение лазерного луча 2 в самой пластине 3 обозначим x2 (см. фиг.1). Координату метки 5 на верхней стороне пластины 3 обозначим x1+x2=ΔX1. Координату метки отраженного от зеркала 4 лазерного луча 2 на верхней стороне прозрачной диффузной пластины 4 обозначим x1+x2+х3=ΔX2.
Эти метки 5 движутся в зависимости от времени, реагируя на движение поверхности воды (см. фиг.4), и находятся на некотором расстоянии (x1, ΔX1, х3, ΔX2) от «нулевых меток» (см. фиг.1). За «нулевые метки» принимаем точки, через которые проходит луч, когда вода находится в спокойном, невозмущенном состоянии, т.е. когда лазерный луч 2 распространяется вертикально вверх вдоль оси Z. Для записи траектории движения меток 5 на пластине 3 в общем случае используют одну скоростную цифровую видеокамеру, соединенную с компьютером.
В общем случае реализации способа в качестве прозрачной диффузной пластины 3 может быть использована любая прозрачная пластина с толщиной Δ, например стеклянная. В качестве цифровой видеокамеры может быть использована, например, видеокамера Philips SPC 900NC с частотой 90 кадров в секунду, разрешение 640×480 точек. В качестве лазера 1 может быть использован любой полупроводниковый лазер непрерывного действия.
Устройство для реализации предлагаемого способа по п.2 формулы изобретения содержит те же элементы, что и устройство на фиг.1. Отличие состоит в том, что в этом частном случае реализации способа, например, в лабораторных условиях, когда нет ветра, в качестве пластины 3 может быть использована тонкая прозрачная пленка, толщиной которой в расчетах можно пренебречь.
В другом частном случае реализации способа по п.3 формулы изобретения (на чертежах не указан) используют не менее трех лазеров 1 с лучами разного цвета, установленных на требуемое расстояние друг от друга, определяемое минимальной длиной волны исследуемого волнения. В этом случае отклоненные водной поверхностью лазерные лучи 2 разного цвета одновременно визуализируют на упомянутой прозрачной диффузной пластине 3 в виде меток разного цвета.
Разработанный способ реализуют следующим образом.
Посредством устройства, представленного схематически на фиг.1 в плоскости XZ, лазерный луч 2 от лазера 1 направляют вдоль оси Z вертикально вверх из подводного положения через некоторую толщу воды и взволнованную водную поверхность, угол наклона αx и высоту h которой в месте выхода луча необходимо определять (восстанавливать по измеренным величинам).
Более подробно прохождение лазерного луча 2 через взволнованную водную поверхность показано на фиг.2. В воде лазерный луч 2 распространяется прямолинейно и только на поверхности воды происходит его преломление, и формулы для угла преломления βx лазерного луча 2 и угла между направлением лазерного луча 2 и вертикальной осью Z φx имеют следующий вид:


где n1 - коэффициент преломления воды; n2 - коэффициент преломления воздуха; αx - угол падения лазерного луча 2 в плоскости XZ.
Угол падения луча αx равен углу наклона водной поверхности в данной точке, т.е. это тот угол, который необходимо определять.
Отклоненный водной поверхностью лазерный луч 2 и отклоненный лазерный луч 2, отраженный с помощью зеркала 4, визуализируют в виде меток 5 одновременно на прозрачной диффузной пластине 3. Поскольку в общем случае реализации способа прозрачная диффузная пластина 3 имеет толщину Δ, то лазерный луч 2 при прохождении через нее испытывает преломление на входе и выходе из пластины. Смещение метки 5 по оси Хна верхней поверхности прозрачной диффузной пластины 3 при выходе лазерного луча 2 из нее ΔX1 будет равно сумме смещений
(х1+х2), где:
где х1 - смещение координаты лазерного луча 2 на нижней поверхности прозрачной диффузной пластины 3, x2 - смещение координаты лазерного луча 2 в самой пластине 3; n3 - коэффициент преломления материала прозрачной диффузной пластины 3; Δ - толщина прозрачной диффузной пластины 3; γx - угол преломления лазерного луча 2 в материале прозрачной диффузной пластины 3, например в стекле.
Смещение метки 5 отклоненного лазерного луча 2, отраженного с помощью зеркала 4, по оси Х на верхней поверхности прозрачной диффузной пластины ΔX2 равно сумме смещений (ΔX1+х3), где

Из формул (2-4) видно, что смещения ΔX1, и ΔX2 зависят от параметров водной поверхности: угла наклона αx и высоты h волнения водной поверхности.
Таким образом, разработанный способ позволяет в каждом кадре видеокамеры одномоментно измерить две величины (координаты меток 5 отклоненного лазерного луча 2 и отклоненного лазерного луча 2, отраженного с помощью зеркала 4, на верхней поверхности прозрачной диффузной пластины 3), которые позволяют найти однозначное решение обратной задачи и определить угол наклона αx и высоту h волнения водной поверхности.
Высоту h волнения находят из следующего соотношения:

Угол наклона αx водной поверхности находят решая следующее трансцендентное уравнение с помощью известных методов, например, с помощью метода деления пополам:

Повторив приведенные выше рассуждения для смещения метки 5 в плоскости YZ, получим формулы для угла наклона αy водной поверхности вдоль оси Y:

Высоту волны можно найти следующим образом, зная y1+y2=ΔY1, ΔY2, H1, H2:
Таким образом, как следует из формул 5-8, одновременная фиксация меток 5 лазерного луча 2 позволяет синхронно восстанавливать углы наклона αx, αу и высоту h волнения водной поверхности в точке прохождения лазерного луча 2 через водную поверхность.
В общем случае реализации с помощью цифровой видеокамеры фиксируют величины отклонений ΔX1, ΔY1 и ΔX2, ΔY2 упомянутых меток 5 на прозрачной диффузной пластине 3 относительно нулевой отметки. После чего с помощью компьютера вычисляют координаты меток 5 в каждом кадре видеоизображения и численным методом по указанному алгоритму (формулам 5-8) определяют искомые величины углов наклона αx и αy водной поверхности в выбранной точке и высоту h волнения водной поверхности в той же точке, что позволяет решить поставленную задачу по синхронному (одновременному) определению требуемых параметров волнения в одной точке.
Таким образом, по сравнению с прототипом предлагаемый способ обладает большей надежностью, быстродействием и дешевизной исполнения за счет уменьшения количества цифровых видеокамер, объема записываемой информации и изменения конструктивных элементов в схеме реализации способа.
В реализованном на практике способе (в лабораторных условиях) в качестве прозрачной диффузной пластины 3 была использована тонкая прозрачная пленка, толщиной которой можно пренебречь в расчетах. Формулы для расчета высоты h и углов наклона αx и αy волнения в этом случае значительно упрощаются:


Таким образом, по смещению меток 5 лазерного луча 2 вдоль оси Х восстанавливают угол наклона αx по оси Х и высоту h.
Для тонких пленок формулы для расчета высоты h и угла наклона αy имеют следующий вид:


Из формул (9 и 11) видно, что высота h может быть восстановлена двумя способами (по измерениям вдоль оси Х или оси Y). Это помогает преодолеть недостаток, свойственный вертикальной схеме измерения. Дело в том, что для плоской поверхности (αx=0, αу=0) высоту h восстановить невозможно и при обработке для восстановления высоты волнения необходимо использовать соседние точки, строя по ним аппроксимацию.
Однако вероятность того, что углы наклона по осям Х и Y одновременно будут равны нулю, существенно ниже, следовательно, высота h волнения в разработанном способе будет измеряться в подавляющем большинстве случаев.
Особенностью реализации разработанного способа по п.3 формулы является то, что одновременное использование лазеров 1 разных цветов, например, трех, установленных на требуемое расстояние друг от друга, позволяет расширить возможности способа. Расстояние между лазерами 1 определяется минимальной длиной волны исследуемого волнения, параметры которой требуется определить.
В этом случае отклоненные водной поверхностью лазерные лучи 2 разного цвета одновременно визуализируют на упомянутой прозрачной диффузной пластине 3 в виде меток разного цвета. Расположив три лазера 1 по схеме, например, треугольником, можно измерять пространственное распределение наклонов и двумерный спектр высот и наклонов, т.е. работать с двумерным волнением и определять угловое распределение волнения, как это делают известным способом с помощью решетки из струнных волнографов, но не искажая при этом, в отличие от струнных волнографов, исследуемое волнение.
Предлагаемый способ измерения предоставляет новые возможности для исследования параметров волнения океанологам, а также специалистам, разрабатывающим новые алгоритмы обработки данных для современной измерительной радиолокационной аппаратуры.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВ НАКЛОНА И ВЫСОТЫ ВОЛНЕНИЯ ВОДНОЙ ПОВЕРХНОСТИ ОТНОСИТЕЛЬНО ЕЕ РАВНОВЕСНОГО СОСТОЯНИЯ | 2009 |
|
RU2410643C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА НАКЛОНА И ВЫСОТЫ ВОЛНЕНИЯ ВОДНОЙ ПОВЕРХНОСТИ ОТНОСИТЕЛЬНО ЕЕ РАВНОВЕСНОГО СОСТОЯНИЯ | 2010 |
|
RU2448324C2 |
| СПОСОБ КОНТРОЛЯ САМОЛЕТНОГО РАДИОЛОКАТОРА | 2007 |
|
RU2358278C2 |
| УЗЕЛ ГЛАВНОГО ВАЛА ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2020 |
|
RU2809561C1 |
| Сканирующий лазерный волнограф с регистрацией "мгновенной" формы поверхности | 2020 |
|
RU2749727C1 |
| Сканирующий оптический волнограф | 2019 |
|
RU2746186C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ЛИНЕЙНОГО РЕНТГЕНОВСКОГО ТОМОГРАФА | 2008 |
|
RU2371094C1 |
| ДВУХСТОРОННИЙ ПЬЕЗОЭЛЕКТРОМЕХАНИЧЕСКИЙ МИКРОПРИВОД | 2004 |
|
RU2259913C1 |
| СПОСОБ ФОРМИРОВАНИЯ МАССИВА МИКРООПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2013 |
|
RU2540727C1 |
| ИНТЕРФЕРОМЕТРИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ ТОЛЩИНЫ И ПОКАЗАТЕЛЯ ПРЕЛОМЛЕНИЯ ПРОЗРАЧНЫХ ОБЪЕКТОВ | 2006 |
|
RU2313066C1 |
Изобретение относится к области океанографических измерений и позволяет синхронно измерять высоту h и углы наклона αх и αу волнения водной поверхности в одной точке. Техническим результатом является разработка способа синхронного измерения высоты и наклонов волнения водной поверхности в одной точке, обладающего достаточным быстродействием, надёжностью и простотой реализации. Лазерный луч направляют вдоль оси Z вертикально вверх из подводного положения через некоторую толщу воды и водную поверхность, угол наклона которой измеряют в месте выхода луча, при этом на прозрачной диффузной пластине визуализируют в виде меток отклонённый водной поверхностью лазерный луч и отклонённый лазерный луч, отраженный от зеркала, размещенного параллельно прозрачной диффузной пластине на расстоянии Н2, с помощью цифровой видеокамеры с растровым просмотром фиксируют величины отклонений упомянутых меток относительно нулевой отметки, после чего по одновременно измеренным отклонениям ΔХ1, ΔХ2, ΔY1, ΔY2 синхронно восстанавливают (вычисляют) величины соответствующих мгновенных значений углов наклона водной поверхности в выбранной точке и высоту h волнения водной поверхности в той же точке. 2 з.п. ф-лы, 4 ил.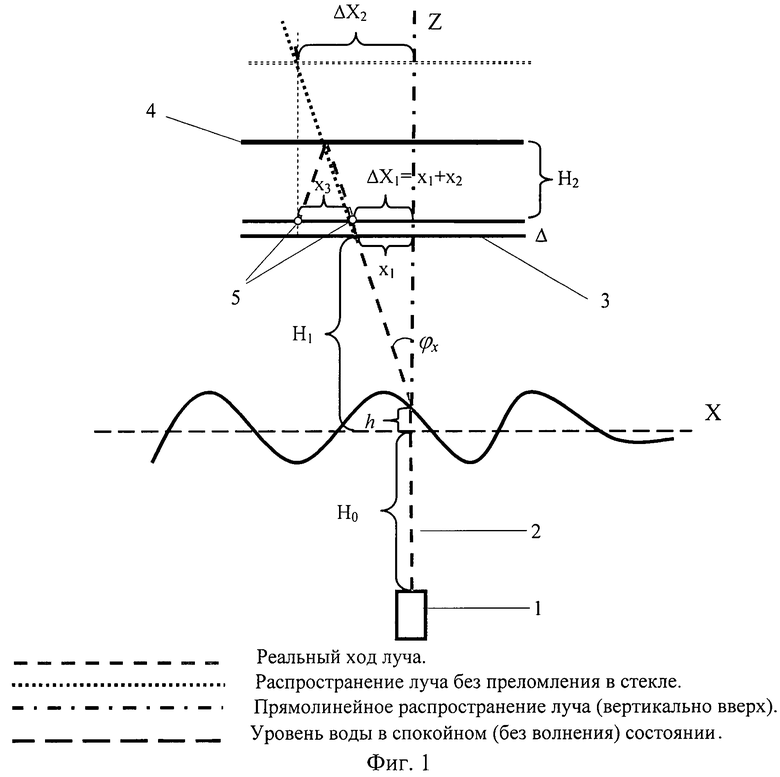
1. Способ измерения углов наклона и высоты h волнения водной поверхности относительно ее равновесного состояния, заключающийся в том, что, по крайней мере, один лазерный луч направляют вертикально вдоль оси Z из подводного положения через некоторую толщу воды и водную поверхность, угол наклона и высоту волнения которой измеряют в точке выхода луча из воды, отклоненный водной поверхностью лазерный луч визуализируют в виде метки на приемной прозрачной диффузной пластине, расположенной в плоскости XY над водной поверхностью на расстоянии H1, одновременно с этим с помощью цифровой видеокамеры фиксируют величины отклонений упомянутой метки на приемной прозрачной диффузной пластине ΔХ1 и ΔY2 относительно нулевой отметки, отличающийся тем, что одновременно на упомянутой приемной прозрачной диффузной пластине также визуализируют в виде метки отклоненный лазерный луч, отраженный с помощью зеркала, установленного над упомянутой приемной прозрачной диффузионной пластиной параллельно ей на расстоянии Н2, с помощью цифровой видеокамеры фиксируют величины отклонений упомянутой метки ΔХ2 и ΔY2 относительно нулевой отметки, после чего по одномоментно измеренным отклонениям ΔХ1, ΔХ2, ΔY1, ΔY2 синхронно восстанавливают (вычисляют) величины соответствующих мгновенных значений углов наклона αх и αу водной поверхности в выбранной точке и высоту h волнения водной поверхности в той же точке.
2. Способ по п.1, отличающийся тем, что в качестве приемной прозрачной диффузной пластины используют тонкую прозрачную пленку.
3. Способ по п.1, отличающийся тем, что вдоль оси Z вертикально вверх из подводного положения через некоторую толщу воды и водную поверхность направляют не менее трех лазерных лучей разного цвета, разнесенных на требуемое расстояние друг от друга, а отклоненные водной поверхностью и отраженные от зеркала лазерные лучи визуализируют на упомянутой приемной диффузной пластине в виде меток разного цвета, при этом вычисление величин соответствующих мгновенных значений углов наклона αх, αу и высоты h волнения водной поверхности в месте выхода каждого луча осуществляют параллельно и независимо друг от друга для каждого луча.
| УСТРОЙСТВО ДЛЯ БИОЛОГИЧЕСКОГО КОНТРОЛЯ ВОЗДУШНОЙ И ВОДНОЙ СРЕДЫ | 2002 |
|
RU2238542C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С ЛЕТАТЕЛЬНОГО АППАРАТА НА ПЛАВУ | 1996 |
|
RU2112925C1 |
| Отстойная непрерывно-действующая центрифуга со шнековой выгрузкой осадка | 1956 |
|
SU109102A1 |
| Рычажный механизм | 1989 |
|
SU1679093A1 |
| ЕР 1901057 А1, 19.03.2008. | |||

