Изобретение относится к области экологии, рыбного хозяйства и может быть использовано для оценки функционирования биотических сообществ водных экосистем, с целью сбора сведений о численности, биомассе и пространственном распределении ключевых видов гидробионтов.
Классические исследования включают отбор проб зоопланктона и их последующий анализ под микроскопом. Существуют различные способы отбора проб зоопланктона: лов сеткой [Шаповалова И.М., Вологдин М.П. О количественном учете озерного бокоплава // Гидробиол. журн. 1973. IX. №5. С.85-89], батометром [Жадин В.И. Методы гидробиологического исследования. М.: Высш. шк. 1960. 189 с.] или шланговым насосом [Trevorrow M.V., Tanaka Y. Acoustic and in situ measurements of freshwater amphipods (Jesogammarus annandalei) in Lake Biwa, Japan // Limnol. Oceanogr. 1997. V.42. №1. P.121-132]. Анализ проб под микроскопом позволяет получить такие важные характеристики популяции как: размерный состав и распределение возрастных стадий, половую структуру, плодовитость.
Однако применение этих способов требует больших временных затрат как для отбора, так и обработки проб. Как следствие, нельзя получить мгновенную картину распределения животных в пространстве. Также известно, что животные способны избегать орудия лова, что приводит к недооценке их количества и большой статистической погрешности.
Наряду с классическими способами отбора зоопланктона применяются и автоматизированные подходы, например акустическое зондирование и подводные видеосъемки [Handbook of scaling methods in aquatic ecology: measurement, analysis, simulation / Edited by Seuront L, Strutton P.G. CRC Press. 2004. 600 p.; Zooplankton methodology manual / Edited by Harris R.P. et al. Elsevier. 2000. 684 p.].
Акустический мониторинг позволяет получать практически мгновенную картину распределения организмов в пространстве. Анализируется достаточно большая площадь водной толщи. Непрерывность регистрации эхосигналов в процессе зондирования также дает возможность оценить вертикальные миграции гидробионтов.
Однако этот метод имеет существенные ограничения при работе с низкой плотностью организмов. Также крайне затруднительно получить таксономический состав и морфометрию планктона.
Наиболее перспективным способом исследований являются способы подводного видеонаблюдения, активно развивающиеся в последние годы [Теесе M.A. An inexpensive remotely operated vehicle for underwater studies // Limnol. Oceanogr.: Methods. 7. 2009. P.206-215]. Подводные камеры позволяют получать качественное изображение организмов в широком размерном диапазоне, включая организмы зоопланктона [Schuiz J., Barz K., Ayon P. Imaging of plankton specimens with the lightframe on-sight keyspecies investigation (LOKI) system // Journal of the European optical society-rapid publications. 5. 2010. P.10017].
Более совершенной системой, подробно описанной в литературе, является UVP5 [Picheral M., Guidi L., Stemmann L., Karl D.M., Iddaoud G., Gorsky G. The Underwater Vision Profiler 5: An advanced instrument for high spatial resolution studies of particle size spectra and zooplankton // Limnol. Oceanogr.: Methods. 8. 2010. P.462-473]. Она использует в качестве подсветки объектов узколинейный стробоскопический источник света (длина волны 625 нм), образующий перед камерой световую область с помощью двух установленных друг против друга световых модулей. Типичный размер светового луча каждого модуля составляет 3×20 см.
Наиболее близким техническим решением является способ определения плотности концентрации рыб [п.2167434 РФ, МПК G01S 17/00, опубл. 20.03.1998 г. (прототип)], включающий съемку с помощью лазерной подводной телевизионной системы со стробированием по дальности и подсчетом визуально или с помощью компьютера числа рыб, наблюдаемых в кадре.
Основной недостаток данного способа, применительно к изучению вертикального распределения и размерной структуры организмов зоопланктона заключаются в следующем: он не позволяет установить точное индивидуальное вертикальное положение исследуемых объектов, поскольку все объекты на видеокадре фиксируются в достаточно широкой области пространства, имеющей форму сферического конуса. По этой же причине невозможно точное определение размера организмов.
Техническим результатом изобретения является разработка более точного способа определения вертикального распределения планктонных организмов и их размерной структуры.
Технический результат достигается тем, что в способе определения вертикального распределения и размерной структуры зоопланктона, включающем подводную видеосъемку с лазерной подсветкой и подсчет организмов наблюдаемых в кадре с помощью компьютерного анализа изображений в видеофайле или визуально, новым является то, что используют узкую фронтальную лазерную подсветку организмов, при этом производят непрерывную регистрацию всех организмов в сканируемом столбе воды и определяют индивидуальную глубину нахождения и размер каждого организма, а вертикальное распределение организмов каждой размерной группы
xi,j=ni,j(h·l·z), где
xi,j - концентрация организмов зоопланктона размерной группы j в слое i высотой z;
ni,j - количество организмов размерной группы j с зафиксированным вертикальным положением d в диапазоне z·(i-1)≤d<z·i;
h - высота и l - ширина зоны видимости видеокамеры на уровне лазерной плоскости.
Признаки, отличающие заявляемое техническое решение от прототипа, не выявлены в других технических решениях при изучении данной и смежной областей техники и, следовательно, обеспечивают заявляемому решению соответствие критериям «новизна» и «изобретательский уровень».
Сущность изобретения поясняется графическими материалами:
На фиг.1 представлена схема устройства, осуществляющего видеодетекцию планктонных организмов описываемым способом.
На фиг.2 дан пример вертикального распределение численности организмов зоопланктона (экз./л) размером менее 2 мм, зарегистрированных с помощью системы видеодетекции с лазерной подсветкой в озере Шира (Россия, Хакасия) (09.10.2011).
Для решения данной проблемы предлагается использовать способ подводной видеодетекции, использующий узкую фронтальную лазерную подсветку организмов.
Устройство (фиг.1) состоит из погружаемого блока, включающего: цифровую цветную видеокамеру (1), лазерный модуль (2), гидростатический датчик глубины (3), и регистрирующего компьютера (4). Элементы погружаемого блока закреплены на треножном штативе (5). В верхней части штатива располагается направленная вниз видеокамера, помещенная в водонепроницаемый бокс (6) с обзорным окном (7). Опоры штатива служат для крепления гидростатического датчика глубины и лазерного модуля, которые располагаются на одном уровне. Видеокамера и датчик глубины соединены с регистрирующим компьютером комбинированным кабелем (8). По кабелю осуществляется передача видеоданных и управление видеокамерой, передача сигнала с датчика глубины, а также питание видеокамеры и лазерного модуля. Лазерный модуль крепится на штативе таким образом, чтобы генерируемая лазерная плоскость (9) была перпендикулярна главной оптической оси объектива видеокамеры, а зона видимости камеры (10) находилась внутри границ лазерной плоскости. Расстояние от объектива камеры до лазерной плоскости выбирается с таким расчетом, чтобы исследуемые объекты, находящиеся на этом расстоянии, были достаточно хорошо различимы на видеокадрах с целью последующего определения их размера.
Предлагаемый способ подсчета организмов в водной толще осуществляется следующим образом. Погружаемый блок устройства опускают в водоем от поверхности до дна равномерно с заданной скоростью. При опускании ведется непрерывная запись изображения с камеры и значений датчика глубины с помощью регистрирующего компьютера. В результате сканирования водной толщи лазерной плоскостью все встреченные организмы подсвечиваются и их изображения записываются в видеофайл. Максимальная скорость опускания устройства определяется скоростью захвата изображений видеокамерой, т.е. камера должна сделать не менее одного кадра за то время, пока объект остается подсвеченным.
Определение размерного состава и вертикального распределения планктонных организмов выполняется на основе компьютерного анализа изображений в видеофайле или визуально (в случае малых численностей или низких требований к точности). В кадре подсвеченные организмы имеют более высокую яркость и оттенок, соответствующий цвету лазера (фиг.1, позиция 77), что позволяет их легко отличать от фона и организмов, находящихся вне лазерной плоскости (фиг.1, позиция 72). Точное вертикальное положение каждого подсвеченного организма определяется на основе показаний датчика глубины, установленного на одном уровне с лазерной плоскостью. В видеофайле отмечается время, когда организм попадает в свет лазера и для этого же времени находится значение в файле данных датчика глубины. Найденное значение глубины присваивается наблюдаемому организму. В итоге, после обработки всего видеофайла, устанавливается вертикальное положение всех организмов в сканированном столбе воды. Поскольку расстояние от объектива камеры до подсвеченного объекта всегда постоянно, то размеры организмов находят путем прямого измерения их изображений в кадре в пикселях и последующего перевода в метрические единицы. Для перевода используют коэффициент k, определяющий, сколько метрических единиц зоны лазерной плоскости отображает один пиксель. Коэффициент k может быть найден как

где
l - длина (или ширина) зоны видимости камеры на уровне лазерной плоскости в метрических единицах; lfr - соответствующая длина (или ширина) кадра в пикселях.
Например, если длина изображения подсвеченного объекта в кадре limg=10 пикселей, ширина кадра lf=640 пикселей, а ширина зоны видимости камеры на уровне лазерной плоскости l=50 мм, то реальный размер объекта lobj в мм будет
В гидробиологических исследованиях часто необходимо получить данные о вертикальном распределении численности и биомассы планктонных организмов, а также найти их интегральные величины в столбе воды под метром квадратным. Предлагаемый способ позволяет легко рассчитать эти значения по результатам видеодетекции. Если вся вертикаль водной толщи разбита на N слоев высотой z, то концентрация численности организмов зоопланктона xi,j каждой размерной группы j в слое i будет определяться как
xi,j=ni,j(h·l·z),
где
ni,j - количество организмов размерной группы j с зафиксированным вертикальным положением d в диапазоне z·(i-1)≤d<z·i,
h - высота и l - ширина зоны видимости видеокамеры на уровне лазерной плоскости.
Биомасса организмов зоопланктона bε, в слое i будет определяться как

Интегральная численность Х и биомасса B в выделенном столбе воды под метром квадратным будет определяться согласно формулам
Пример вертикального распределения концентрации организмов зоопланктона представлен на фиг.2.
Заявляемый способ определения размерной структуры и вертикального распределения планктонных организмов за счет использования узкой фронтальной лазерной подсветки организмов позволяет определить точное местоположение объекта (до нескольких миллиметров) в пространстве, его размерные характеристики, а также получить более контрастное изображение относительно фона, что значительно облегчает автоматический подсчет количества встреченных объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Видеорегистратор зоопланктона | 2017 |
|
RU2670713C9 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ ПОД ВОДОЙ | 2009 |
|
RU2424542C2 |
| СПОСОБ ДЛЯ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ СКОРОСТИ И ПЕРЕМЕЩЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2518018C2 |
| СПОСОБ РЕГИСТРАЦИИ ПЛАНКТОНА | 2016 |
|
RU2623984C1 |
| СПОСОБ КОЛИЧЕСТВЕННОЙ ОЦЕНКИ ПРОФИЛЯ И СОСТАВА ПРИТОКА В МАЛОДЕБИТНЫХ ОБВОДНЕННЫХ НЕФТЯНЫХ СКВАЖИНАХ | 2018 |
|
RU2724814C2 |
| ПРОЖЕКТОР С ДИФРАКЦИОННЫМ МИКРОРЕЛЬЕФОМ ДЛЯ СИСТЕМЫ НАБЛЮДЕНИЯ | 2006 |
|
RU2431774C2 |
| Стереодисплей и видеокамера для съёмки 3D-видеоизображений для этого стереодисплея | 2019 |
|
RU2840856C2 |
| Стереодисплей (варианты), видеокамера для стереосъёмки и способ компьютерного формирования стереоизображений для этого стереодисплея | 2017 |
|
RU2698919C2 |
| СПОСОБ РЕГИСТРАЦИИ СЕЧЕНИЯ ПРОФИЛЯ ТОННЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2570835C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ КАПЕЛЬ В НЕСТАЦИОНАРНЫХ АЭРОЗОЛЬНЫХ ПОТОКАХ | 2023 |
|
RU2812314C1 |
Изобретение относится к области экологии, рыбного хозяйства и может быть использовано для оценки функционирования биотических сообществ водных экосистем с целью сбора сведений о численности, биомассе и пространственном распределении ключевых видов гидробионтов. Сущность: проводят подводную видеосъемку с узкой фронтальной лазерной подсветкой организмов. Подсчитывают организмы, наблюдаемые в кадре, с помощью компьютерного анализа изображений в видеофайле или визуально. При этом непрерывно регистрируют все организмы в сканируемом столбе воды и определяют индивидуальную глубину нахождения и размер каждого организма, а также вертикальное распределение организмов каждой размерной группы. Технический результат: повышение точности определения вертикального распределения планктонных организмов и их размерной структуры. 2 ил.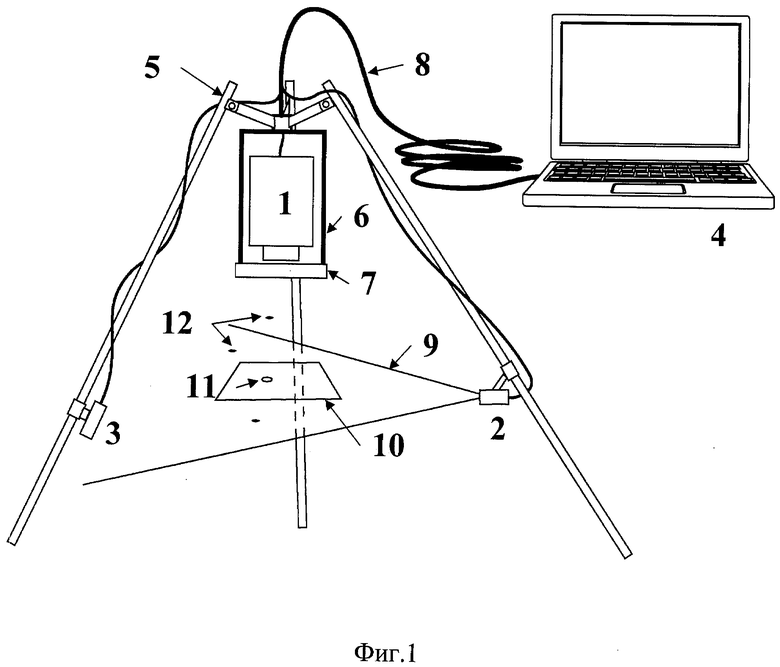
Способ определения вертикального распределения и размерной структуры зоопланктона в водоеме, включающий подводную видеосъемку с лазерной подсветкой и подсчет организмов, наблюдаемых в кадре, с помощью компьютерного анализа изображений в видеофайле или визуально, отличающийся тем, что используют узкую фронтальную лазерную подсветку организмов, при этом производят непрерывную регистрацию всех организмов в сканируемом столбе воды и определяют индивидуальную глубину нахождения и размер каждого организма, а вертикальное распределение организмов каждой размерной группы определяют по формуле
xi,j=ni,j(h·l·z),
где xi,j - концентрация организмов зоопланктона размерной группы j в слое i высотой z;
ni,j - количество организмов размерной группы j с зафиксированным вертикальным положением d в диапазоне z·(i-l)≤d<z·i;
h - высота и l - ширина зоны видимости видеокамеры на уровне лазерной плоскости.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЛОТНОСТИ КОНЦЕНТРАЦИИ РЫБ | 1996 |
|
RU2167434C2 |
| Zadereev E | |||
| and others | |||
| The vertical distribution and abundance of Gammarus lacustris in the pelagic zone of the meromictic lakes Shira and Shunet (Khakassia, Russia) / Aquatic Ecology, 2010, vol.44, №3, p.531-539 | |||
| Способ дистанционного обнаружения рыбных косяков | 1983 |
|
SU1119456A1 |

