ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение в целом относится к системам и способам для определения измеренного значения уровня топлива в топливном баке, а еще конкретнее к определению измеренного значения уровня топлива в топливном баке на основании выходных данных оптических датчиков, установленных внутри топливного бака.
УРОВЕНЬ ТЕХНИКИ
В настоящее время многие самолеты используют емкостные системы для указания количества топлива, в которых топливные зонды содержат две концентрические трубки, выполняющие функцию конденсаторов. Зонды имеют металлические провода, вставляемые в топливный бак, и избыточные опоры, обеспеченные для прокладки проводов, что увеличивает общий вес системы и время изготовления системы.
При эксплуатации по мере погружения зондов в топливо в топливном баке, диэлектрический материал изменяет емкостные выходные данные этих зондов. Выходные данные зонда передают на обрабатывающий блок для определения общего количества топлива в топливном баке.
Зонды других типов включают ультразвуковые зонды, используемые вместо емкостных зондов. Ультразвуковые зонды представляют собой трубки, а верхняя часть таких зондов направляет ультразвуковой сигнал к их днищу. Путь, по которому сигнал распространяется через среду, в частности топливо или воздух, в сочетании с тем, контактирует ли сигнал с поверхностью топлива, определяет высоту топлива в топливном баке. Кроме того, системы указанного типа для указания количества топлива требуют наличия в топливном баке металлических проводов и избыточных опор, которые увеличивают вес системы и время ее изготовления.
Существует потребность в системе для указания количества топлива, предоставляющей систему защиты от электромагнитных помех, которая не требует наличия металла в топливном баке, что исключает наличие металлических проводов в топливном баке и необходимость в использовании избыточных опор, а также уменьшает вес системы и время ее изготовления.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
В одном из примеров описана система, содержащая топливный бак и множество оптических датчиков, установленных внутри топливного бака. Каждый из множества оптических датчиков содержит сенсорный чип и диафрагму, отклоняющуюся, когда давление окружающей среды отлично от опорного давления сенсорного чипа. Система также содержит волоконно-оптический жгут, имеющий оптическое волокно, соединенное с каждым оптическим датчиком из множества оптических датчиков для направления в него света, а также один или более процессоров, соединенных с волоконно-оптическим жгутом для приема выходных данных указанного множества оптических датчиков, характеризующих соответствующие значения давления, и определения измеренного значения уровня топлива в топливном баке на основании выходных данных указанного множества оптических датчиков.
Еще в одном примере описан летательный аппарат, содержащий топливный бак, расположенный в крыле и/или фюзеляже летательного аппарата, и множество оптических датчиков, установленных внутри топливного бака. Каждый из множества оптических датчиков содержит сенсорный чип и диафрагму, отклоняющуюся, когда давление окружающей среды отлично от опорного давления сенсорного чипа. Летательный аппарат также содержит волоконно-оптический жгут, имеющий оптическое волокно, соединенное с каждым оптическим датчиком из множества оптических датчиков для направления в него света, а также один или более процессоров, соединенных с волоконно-оптическим жгутом для приема выходных данных указанного множества оптических датчиков, характеризующих соответствующие значения давления, определения измеренного значения уровня топлива в топливном баке на основании выходных данных указанного множества оптических датчиков и учета любых отклонений крыла и динамических характеристик полета.
Еще в одном примере описан способ определения измеренного значения уровня топлива в топливном баке. Данный способ включает прием от множества оптических датчиков, установленных внутри топливного бака, выходных данных, характеризующих соответствующие значения давления, причем каждый из указанного множества оптических датчиков содержит сенсорный чип и диафрагму, отклоняющуюся, когда давление окружающей среды отлично от опорного давления сенсорного чипа. Способ также включает определение посредством одного или более процессоров измеренного значения уровня топлива в топливном баке на основании выходных данных множества оптических датчиков.
Признаки, функции и преимущества, которые были описаны в данном документе, можно достичь независимо друг от друга в различных примерах или можно объединить еще в одних примерах, дополнительные сведения о которых можно найти по ссылке на приведенные далее описание и чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
В прилагаемой формуле изобретения заданы новые признаки, характеризующие иллюстративные примеры. Однако иллюстративные примеры, а также предпочтительный режим использования, дополнительные задачи и их описания будут лучше понятны со ссылкой на приведенное далее подробное описание иллюстративного примера настоящего изобретения при прочтении этого описания с использованием прилагаемых чертежей.
На фиг. 1 показана структурная схема системы согласно примеру.
На фиг. 2 показана структурная схема примера летательного аппарата согласно примеру.
На фиг. 3 показан пример крыла, содержащего топливный бак, согласно примеру.
На фиг. 4 показан пример одного из оптических датчиков согласно примеру.
На фиг. 5 показана часть топливного бака с оптическими датчиками согласно примеру.
На фиг. 6 показана часть топливного бака с оптическими датчиками согласно примеру, который наклонен по причине условий полета летательного аппарата и у которого не имеется какой-либо видимой деформации.
На фиг. 7 показана часть топливного бака с оптическими датчиками согласно примеру, который наклонен по причине условий полета летательного аппарата, а на верхней части и днище топливного бака имеется видимая деформация.
На фиг. 8 показана блок-схема примера способа определения измеренного значения уровня топлива в топливном баке согласно примеру.
На фиг. 9 показана блок-схема примера способа для использования со способом согласно примеру.
На фиг. 10 показана блок-схема примера способа для использования со способом согласно примеру.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Далее более подробно будут описаны раскрытые примеры со ссылкой на прилагаемые чертежи, на которых показаны некоторые из раскрытых примеров, но не все из них. В действительности могут быть описаны несколько различных примеров, при этом не следует считать, что настоящее изобретение ограничено примерами, раскрытыми в данном документе. Скорее эти примеры будут описаны для того, чтобы настоящее изобретение было законченным и полным, а также будут полностью передавать объем настоящего изобретения специалистам в данной области техники.
В рамках примеров, раскрытых в данном документе, описан пример системы для указания количества топлива, содержащей топливный бак, оптические датчики, которые установлены внутри топливного бака и каждый из которых содержит сенсорный чип и диафрагму, отклоняющуюся, когда давление окружающей среды отлично от опорного давления сенсорного чипа, волоконно-оптический жгут, который имеет оптическое волокно, соединенное с каждым из оптических датчиков для направления в него света, а также процессор, соединенный с волоконно-оптическим жгутом для приема выходных данных оптических датчиков, характеризующих соответствующие значения давления, и определения измеренного значения уровня топлива в топливном баке на основании выходных данных оптических датчиков.
На фиг. 1 показана структурная схема системы 100 согласно примеру. Система 100 содержит топливный бак 102, множество оптических датчиков 104, установленных внутри топливного бака 102, волоконно-оптический жгут 106, который имеет оптическое волокно или оптические волокна 108, соединенные с каждым из оптических датчиков 104 для направления в него света, а также один или более процессоров 110, соединенных с волоконно-оптическим жгутом 106 для приема выходных данных оптических датчиков 104, характеризующих соответствующие значения давления, и определения измеренного значения уровня топлива в топливном баке 102 на основании выходных данных оптических датчиков 104.
Топливный бак 102 может представлять собой одиночный топливный бак с одиночной секцией, одиночный топливный бак с множеством секций или множество топливных баков.
Каждый из оптических датчиков 104 содержит сенсорный чип 140 и диафрагму 142, отклоняющуюся, когда давление окружающей среды отлично от опорного давления сенсорного чипа, как описано более подробно ниже со ссылкой на фиг.4. В одном из примеров оптические датчики 104 содержат динамические оптические датчики давления на основе фотонных кристаллов.
Волоконно-оптический жгут 106 содержит оптическое волокно или оптические волокна 108, используемые для проведения света. Оптическое волокно или оптические волокна 108 могут быть по-отдельности покрыты слоями пластика и могут содержаться в защитной трубке. Кабели различных типов могут быть использованы и расположены вместе в волоконно-оптическом жгуте 106. Волоконно-оптический жгут 106 размещен с возможностью входа в топливный бак 102 в одном месте, а также расположен внутри топливного бака 102 и оканчивается соответствующим оптическим волокном или соответствующими оптическими волокнами 108 в соответствующих положениях оптических датчиков 104. Несмотря на то что на фиг. 1 показан целый волоконно-оптический жгут 106, расположенный внутри топливного бака 102, часть указанного волоконно-оптического жгута 106 может быть размещена снаружи топливного бака 102 для соединения с процессором или процессорами 110.
Также показано, что система 100 содержит вычислительное устройство 112, которое содержит процессор или процессоры 110, а также интерфейс 114 связи, хранилище 116 данных, выходной интерфейс 118 и дисплей 120, каждый из которых соединен с шиной 122 связи. Вычислительное устройство 112 также может содержать аппаратные средства для обеспечения возможности связи в вычислительном устройстве 112 и между вычислительным устройством 112 и иными устройствами (не показаны). Аппаратные средства могут содержать, например, передатчики, приемники и антенны.
Интерфейс 114 связи может представлять собой беспроводной интерфейс и/или один или более проводных интерфейсов, которые позволяют осуществлять связь в узком диапазоне и связь в широком диапазоне с одной или более сетями или с одним или более удаленных устройств. Такие беспроводные интерфейсы могут обеспечивать связь в соответствии с одним или более протоколом беспроводной связи, таким как линия передачи данных (VDL) на очень высокой частоте (VHF), линия передачи данных (VDL) режима 2, линия цифровой связи авиационной системы связи летательного аппарата с адресацией и оповещением (ACARS) посредством линий радиосвязи на очень высокой частоте (VHF) и спутниковых линий связи (SATCOM), линии связи на основе технологии «Bluetooth», линии связи на основе технологии «WiFi» (например, протокол 802.11 института инженеров по электротехнике и электронике (IEEE), протокол связи на основе технологии долгосрочного развития (LTE), сотовые линии связи, протоколы на основе стандарта ближней радиосвязи (NFC) и/или другие протоколы беспроводной связи. Такие проводные интерфейсы могут содержать шины данных летательного аппарата, такие как интерфейсы на основе стандартов 429, 629 или 664 корпорации «Авиационное радио» (ARINC), интерфейс сети «Ethernet», интерфейс универсальной последовательной шины (USB) или аналогичный интерфейс для связи посредством провода, скрученной пары проводов, коаксиального кабеля, оптической линии связи, оптоволоконной линии связи или другого физического соединения с проводной сетью. Таким образом, интерфейс 114 связи может быть выполнен с возможностью приема входных данных от одного или более устройств, а также может быть выполнен с возможностью отправки выходных данных на другие устройства.
Хранилище 116 данных может содержать или иметь форму одного или более компьютерочитаемых носителей данных, которые могут быть считаны или к которым могут получить доступ процессор или процессоры 110. Компьютерочитаемый носитель данных может содержать энергонезависимые и/или энергозависимые запоминающие компоненты, такие как оптические запоминающие устройства, магнитные запоминающие устройства, органические запоминающие устройства или иные запоминающие устройства, или запоминающее устройство на дисках, которое может быть встроено целиком или частично в процессор или процессоры 110. В качестве хранилища 116 данных используют компьютерочитаемый носитель данных для длительного хранения данных. В некоторых примерах хранилище 116 данных может быть реализовано с использованием одиночного физического устройства (например, одного оптического запоминающего устройства, магнитного запоминающего устройства, органического запоминающего устройства или запоминающего устройства другого типа, или запоминающего устройства на дисках), а в других примерах хранилище 116 данных может быть реализовано с использованием двух или более физических устройств.
Таким образом, хранилище 116 данных представляет собой компьютерочитаемый носитель данных для длительного хранения данных, на котором хранятся исполняемые инструкции 124. Инструкции 124 содержат исполняемый компьютером код. Исполнение инструкций 124 посредством процессора или процессоров 110 вызывает то, что процессор или процессоры 110 осуществляют заданные функции. Такие функции включают в себя прием выходных данных, характеризующих соответствующие значения давления, от оптических датчиков 104, а также определение высоты топлива в топливном баке 102 на основании выходных данных оптических датчиков 104.
Процессор или процессоры 110 могут представлять собой процессор общего назначения или процессор специального назначения (например, процессоры для цифровой обработки сигналов, специализированные интегральные схемы и т.п.). Процессор или процессоры 110 могут принимать входные данные от волоконно-оптического жгута 106, а также обрабатывать эти входные данные для создания выходных данных, которые хранят в хранилище 116 данных, и выдавать их на дисплей 120. Процессор или процессоры 110 могут быть выполнены с возможностью исполнения исполняемых инструкций 124 (например, компьютерочитаемых программных инструкций), которые хранят в хранилище 116 данных и исполняют для реализации функциональных возможностей системы 100, описанной в данном документе.
Выходной интерфейс 118 выдает информацию на дисплей 120 или на иные компоненты. Таким образом, выходной интерфейс 118 может быть аналогичен интерфейсу 114 связи и может представлять собой беспроводной интерфейс (например, передатчик) или проводной интерфейс.
Система 100 также содержит источник 126 света, связанный или соединенный с волоконно-оптическим жгутом 106 для создания света, который пропускают по оптическому волокну или оптическим волокнам 108. Источник 126 света может содержать, например, один светодиод или множество светодиодов. Источник 126 света может быть соединен с волоконно-оптическим жгутом 106 за пределами топливного бака 102.
Система 100 может содержаться в нескольких различных транспортных средствах, в том числе, например, в летательном аппарате, автомобилях или лодках.
На фиг. 2 показана структурная схема примера летательного аппарата 130 согласно примеру. Летательный аппарат 130 может содержать систему 100 несмотря на то, что на фиг. 2 для простоты показана только часть системы 100. Летательный аппарат 130 содержит топливный бак 102, расположенный в крыле 132 и/или фюзеляже 134 летательного аппарата 130. В некоторых примерах топливный бак 102 может быть полностью размещен в крыле 132. В других примерах топливный бак 102 может быть полностью размещен в фюзеляже 134. Еще в одних примерах, как показано на фиг.2, топливный бак 102 может быть расположен таким образом, что одна его часть находится в крыле 132 и еще одна его часть находится в фюзеляже 134.
На фиг. 3 показан пример крыла 132, содержащего топливный бак 102 согласно примеру. На фиг. 3 показан топливный бак 102, расположенный в крыле 132 и проходящий до кончика крыла 132. Кроме того, показано, что топливный бак 102 разделен на множество секций. Каждая секция может содержать, например, по меньшей мере один оптический датчик 104. В других примерах топливный бак 102 может и не содержать множество секций.
Согласно фиг. 2, иные компоненты системы 100, такие как источник 126 света и процессор или процессоры 110, могут быть размещены в другом месте в летательном аппарате 130 или возле топливного бака 102.
Процессор или процессоры соединены с волоконно-оптическим жгутом 106 для приема выходных данных оптических датчиков 104, характеризующих соответствующие значения давления, определения измеренного значения уровня топлива в топливном баке 102 на основании выходных данных оптических датчиков 104 и учета любых отклонений крыла 132 и динамических характеристик полета. При этом летательный аппарат 130 содержит систему 136 управления полетом, которая может определить динамические характеристики полета летательного аппарата 130, такие как крен, тангаж и рысканье, а процессор или процессоры 110 могут принимать информацию, связанную с креном, тангажом и рысканьем летательного аппарата 130 и, таким образом, топливного бака 102, из системы 136 управления полетом.
В рамках примеров процессор или процессоры 110 могут исполнять исполняемые инструкции 124, сохраненных в хранилище 116 данных для выполнения функций в реальном времени во время полета летательного аппарата 130. В дальнейшем такая функция может выполняться без задержки или с небольшой задержкой для обработки дополнительных данных, принятых от других источников или введенных вручную. Обработка в реальном времени означает, что процессор или процессоры 110 осуществляют операции во время полета летательного аппарата 130. Обработка в реальном времени может обеспечивать непрерывную обработку информации, принимаемой от оптических датчиков 104. Другими словами, аспект реального времени содержит процессор или процессоры 110, определяющие измеренное значение уровня топлива по существу мгновенно после приема новых или обновленных выходных данных от оптических датчиков 104. Термин «по существу» означает, что указанная характеристика, параметр или значение не обязательно точно достигать, а также означает, что отклонения или изменения, в том числе, например, допустимые отклонения, погрешность измерения, ограничения точности измерения и другие факторы, известные специалисту в данной области техники, могут наблюдаться в величинах, которые не устраняют эффект, который, как предполагалось, обеспечивает указанная характеристика.
На фиг. 4 показан пример одного из оптических датчиков 104, показанных в виде оптического датчика 104а согласно примеру. Оптический датчик 104а содержит сенсорный чип 140 и диафрагму 142, причем диафрагма 142 может представлять собой центральную часть сенсорного чипа 140. Оптическое волокно 108 установлено во втулке 144, а сенсорный чип 140 установлен на скошенной поверхности втулки 144 с использованием адгезива 146 с образованием полости 148 с опорным давлением, которая имеет опорное давление. Когда давление окружающей среды отлично от опорного давления, происходит отклонение диафрагмы 142 сенсорного чипа 140.
В одном из примеров оптический датчик 104а представляет собой устройство микроэлектромеханической системы, а изменения в отклонении диафрагмы могут быть измерены на основании отражения света.
В примере работы оптического датчика 104а свет, проходящий по оптическому волокну 108 по направлению вниз к диафрагме 142, частично отражается от скошенной поверхности 150 волокна (например, первого отражателя), а в дальнейшем частично отражается от диафрагмы 142 сенсорного чипа 140, показанного в стрелке 152 (например, второго отражателя). Эти две отраженные волны интерферируют, а если расстояние между первым отражателем и вторым отражателем составляет целое значение от половины длины волн, то отражения света условно интерферируют, а полное отражение является высоким (или больше порогового значения). Если расстояние между первым отражателем и вторым отражателем составляет целое значение от половины длины волн и четверти длины волны, то в дальнейшем отражения света разрушительно интерферируют, а полное отражение является низким (или меньше порогового значения). Если разделение первого отражателя и второго отражателя находится между этими значениями, то в дальнейшем полное отражение находится между высоким значением и низким значением. Таким образом, отраженный свет является мерой разделения отражателей, которое является мерой давления окружающей среды. В дополнительных примерах интенсивность отраженного света и фаза между различными отражениями обеспечивают результат измерения давления. Справочные таблицы могут быть обеспечены ссылкой на давление, которое соответствует отраженному свету.
В одном из примеров выходные данные оптических датчиков 104 содержат свет, отраженный от соответствующих диафрагм, а процессор или процессоры определяют соответствующее значение давления на основании отраженного света. Процессор или процессоры 110 могут обращаться к справочной таблице для идентификации измеренного давления, которое соответствует количеству отраженного света. В некоторых примерах может иметься датчик света или спектрометр, выдающий дополнительные выходные данные на процессор или процессоры 110 для обеспечения информации, полезной для определения давления.
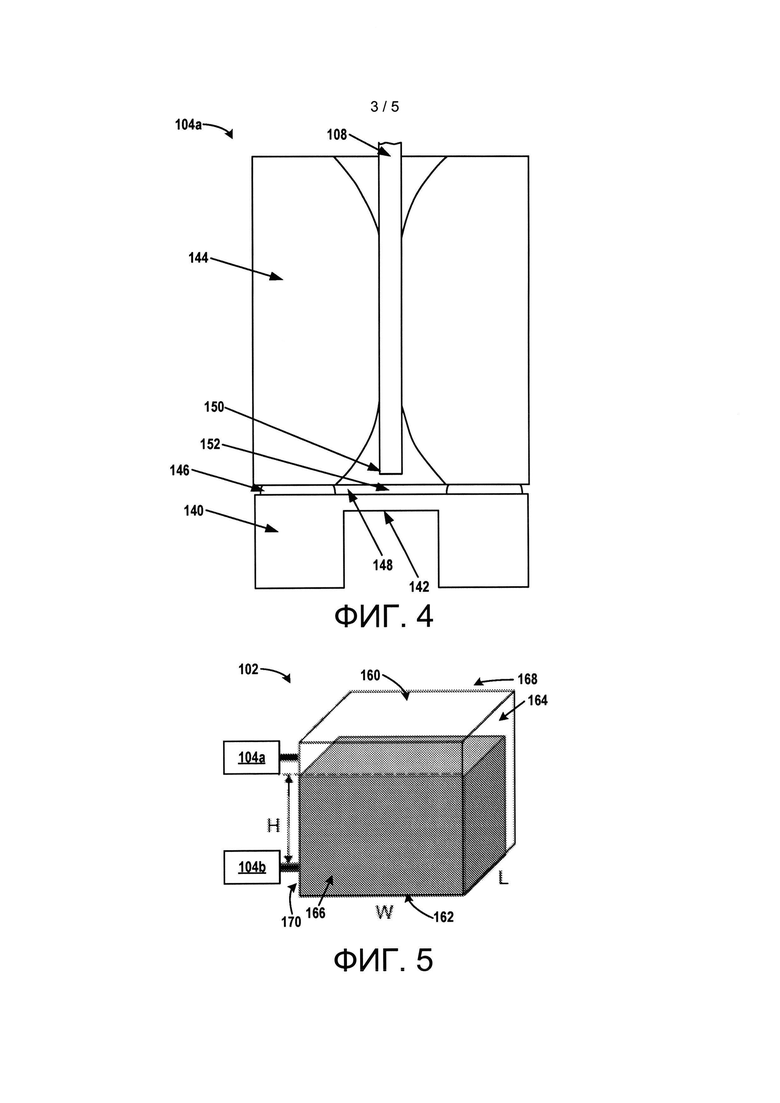
На фиг. 5 показана часть топливного бака 102 с оптическими датчиками 104а-b согласно примеру. В одном из примеров топливный бак 102 имеет верхнюю часть 160, днище 162 и боковины 164, 166, 168 и 170, при этом соответствующие оптические датчики могут быть размещены на любой из боковин 164-170, верхней части 160 и днище 162 в зависимости от размера и конфигурации топливного бака 102. Еще в одном примере, показанном на фиг. 5, оба оптических датчика 104а-b расположены на стороне 170, при этом оптический датчик 104а расположен на стороне 170 рядом с верхней частью 160, а оптический датчик 104b расположен на стороне 170 рядом с днищем 162. Могут быть использованы и многие другие отличные местоположения оптических датчиков на топливном баке 102. Оптические датчики 104а-b могут выдавать информацию, полезную для определения измеренного значения уровня топлива в топливном баке 102.
На фиг. 5 оптические датчики 104а-b показаны таким образом, что они находятся снаружи по отношению к топливному баку 102, однако по меньшей мере соответствующая диафрагма 142 каждого из оптических датчиков 104а-b находится внутри топливного бака 102 таким образом, что топливо или воздух/газ контактирует с диафрагмой 142. В примере, показанном на фиг. 5, воздух/газ контактирует с оптическим датчиком 104а, а топливо контактирует с оптическим датчиком 104b. Кроме того, в примере, показанном на фиг. 5, соединители могут быть размещены на поверхности топливного бака 102 для соединения каждого оптического датчика 104а-b с топливным баком 102. Соединитель может представлять собой вставку для вставки оптических датчиков 104а-b в топливный бак 102. Таким образом, волоконно-оптический жгут 106 может соединяться с соединителем и проникать в топливный бак 102 в одном месте для проведения жгута кабелей внутрь топливного бака 102 и может оканчиваться в каждом положении оптического датчика. Оптические датчики 104 могут быть размещены внутри и на днище 162 топливного бака 102 для получения показаний давления.
В других примерах волоконно-оптический жгут 106 и оптические датчики 104 полностью расположены в топливном баке 102 и могут быть прикреплены к его внутренней поверхности с помощью адгезива.
Для определения измеренного значения уровня топлива в топливном баке рассчитывают объем топлива и плотность используемого топлива. Для определения объема сначала определяют высоту топлива в топливном баке. Для определения высоты могут быть использованы выходные данные оптических датчиков 104а-b. Например, когда давление окружающей среды отлично от опорного давления сенсорного чипа 140, происходит отклонение диафрагмы 142 оптических датчиков 104а-b, что будет возникать в случае, когда топливо находится на уровне оптических датчиков 104а-b или выше этого уровня для контакта с диафрагмой 142. Таким образом, когда оптические датчики 104а-b в топливном баке 102 погружены в топливо или находятся в воздухе во время полета, наблюдается заметная разница давлений, а выходные данные оптических датчиков 104а-b изменяются по причине отклонения диафрагмы 142.
Высота Н, как показано на фиг. 5, может быть рассчитана для горизонтального топливного бака (то есть, ненаклоненного), как показано ниже в уравнении (1).

где
 является удельным весом (например, плотность * вес) топлива, а
является удельным весом (например, плотность * вес) топлива, а
p1 и р2 являются давлениями, измеренными с использованием оптических датчиков 104а-b.
Измеренное значение уровня топлива включает объем топлива в топливном баке 102, а объем топлива может быть определен следующим образом:
Н×W×L, где
Н определяют из уравнения (1),
W является шириной топливного бака 102, а
L является длиной топливного бака 102, как показано на фиг. 5.
Высота может быть определена с использованием уравнения (1) в примерах, в которых оптический датчик 104b расположен на днище топливного бака 102.
Таким образом, в рамках примеров соответствующие положения оптических датчиков 104а-b внутри топливного бака 102 представлены высотой (Н) выше днища 162 топливного бака 102, а процессор или процессоры 110 определяют высоту (Н) топлива в топливном баке 102 на основании соотношения разницы давлений, указанных первым оптическим датчиком 104а и вторым оптическим датчиком 104b, и удельного веса топлива, содержащегося в топливном баке 102, когда бак имеет горизонтальное расположение.
В одном из примеров процессор или процессоры 110 определяют удельный вес топлива, содержащегося в топливном баке 102, на основании температуры внутри топливного бака 102 и ссылки на справочную эмпирическую таблицу зависимости плотности от температуры. Плотность топлива не является постоянной и основана на функции от температуры. Например, в топливном баке 102 имеется топливо известного типа, которое при конкретной температуре будет иметь известную плотность. Датчики температуры могут содержаться в топливном баке 102 и могут быть соединены с процессором или процессорами 110, а в дальнейшем эмпирическая справочная таблица может быть использована для определения плотности топлива известного типа при заданной температуре топлива. При эксплуатации топливного бака 102, установленного на летательном аппарате 130, при нахождении летательного аппарата 130 на земле может быть выбрана кривая зависимости плотности от температуры, а в дальнейшем при нахождении летательного аппарата 130 в полете показания от датчиков температуры могут быть использованы в справочной таблице для определения плотности.
Еще в одном примере для определения плотности и, таким образом, удельного веса топлива процессор или процессоры 110 могут определить удельный вес топлива, содержащегося в топливном баке, на основании (i) разницы между выходными данными двух оптических датчиков 104а-b для определения разницы в весе топлива и (и) известного расстояния между двумя оптическими датчиками 104а-b для расчета веса на единицу объема топлива.
Еще в одном примере оптические датчики 104а-b могут быть выполнены с возможностью дополнительного предоставления выходных данных для определения температуры внутри топливного бака 102. Например, при измерении разности фаз между двумя отраженными пучками света, температура может быть определена снова по ссылке на справочную таблицу, связывающую разность фаз с температурой.
В примере применения топливного бака 102, установленного в крыле 132 летательного аппарата 130, во время полета по причине вихревого движения ветра и других условий полета происходит отклонение крыла 132. По мере увеличения длины крыла 132 также увеличивается величина отклонения. Отклонение крыла 132 может вызвать изменение в приведенном выше результате расчета объема.
Использование оптических датчиков 104 позволяет процессору или процессорам 110 учитывать отклонение крыла и динамические характеристики полета в вышеописанном расчете измеренного значения уровня топлива на основании измеренного давления.
На фиг. 6 показана часть топливного бака 102 с оптическими датчиками 104а-b, причем топливный бак 102 наклонен с углом крена в по причине условий полета летательного аппарата 130, а в топливном баке 102 согласно примеру не видно какой-либо деформации. Таким образом, топливный бак 102 отклоняется на угол крена, а текучая среда распределяется в топливном баке 102. В данном случае высота (Н) может быть рассчитана так, как это показано ниже с использованием уравнений (2) и (3).


Угол (θ) может быть определен на основании крена топливного бака 102 или летательного аппарата 130, при этом указанный угол обеспечивается системой 136 управления полетом. Таким образом, система 136 управления полетом может выдавать угол (в) на процессор или процессоры 110. Поскольку высоту (Н) определяют с использованием уравнения (3), затем может быть произведен вышеописанный расчет объема. Аналогичный расчет может быть осуществлен для летательного аппарата с использованием отклонений значений рысканья и тангажа.
Таким образом, в одном из примеров процессор или процессоры 110 дополнительно принимают информацию, связанную с одним или более из следующего: крен, тангаж и рысканье топливного бака 102, а также определяют высоту (Н) топлива в топливном баке 102 на основании (i) соотношения разницы давлений, указанных первым оптическим датчиком 104а и вторым оптическим датчиком 104b, и удельного веса топлива, содержащегося в топливном баке 102, и (ii) угла (θ) наклона топливного бака 102, определенного на основании информации, связанной с одним или более из следующего: крен, тангаж и рысканье топливного бака 102.
На фиг. 7 показана часть топливного бака 102 с оптическими датчиками 104а-n, причем топливный бак 102 наклонен по причине условий полета летательного аппарата 130, а на верхней части 160 и на днище 162 топливного бака 102 согласно примеру видна деформация. В данном документе объем топлива в топливном баке 102 может быть рассчитан так, как это показано ниже с использованием уравнения (4).

где  Δх=x1-xi-1, и Δh=hi-hi-1.
Δх=x1-xi-1, и Δh=hi-hi-1.
Каждый из оптических датчиков 104а-n, представленных как рi(х) в приведенных выше уравнениях, предоставляет на выходе давление для расчета высоты hi(x) в месте х. По причине наклона летательного аппарата 130 и топливного бака 102, берут cos θ, а также дискретизируют и суммируют объемы топлива с использованием измеренного давления каждого участка. Кроме того, по причине имеющейся на верхней части 160 и на днище 162 деформации, изменения объема топливного бака 102 могут быть учтены с использованием выходных данных от всех оптических датчиков 104а-n.
Таким образом, в рамках одного из примеров процессор или процессоры 110 определяют высоту (Н) топлива в топливном баке 102 в положении каждого из оптических датчиков 104а-n на основании соответствующих значений давления и угла наклона топливного бака 102, а также определяют измеренное значение уровня топлива в топливном баке 102 на основании суммарного объема топлива, определяемого с учетом высоты (Н) для каждого из оптических датчиков 104а-n.
Несмотря на то, что в примере по фиг. 7 показан оптический датчик 104а, расположенный на стороне 170 топливного бака, и оптические датчики 104b-n, расположенные на днище 162 топливного бака 102, оптические датчики могут быть расположены и во многих других местах на топливном баке 102 или в нем. Когда топливный бак 102 установлен в крыле 132 летательного аппарата 130, то ввиду того, что крыло 132 отклоняется в большей степени и является более гибким, использование большего количества оптических датчиков может обеспечить большую точность при измерении уровня топлива. В отличие от этого, когда крыло 132 представляет собой жесткое крыло 132, для обеспечения высокой точности при измерении уровня топлива может быть необходимо меньшее количество оптических датчиков. Аналогичным образом, более короткие крылья могут использовать меньшее количество оптических датчиков по сравнению с более длинными крыльями. В зависимости от размера и формы крыла может быть использовано любое количество оптических датчиков.
На фиг. 8 показана блок-схема примера способа 200 определения измеренного значения уровня топлива в топливном баке 102 согласно примеру. Способ 200, показанный на фиг. 8, представляет пример способа, который может быть использован, например, системой 100, показанной на фиг. 1, и летательным аппаратом 130, показанным на фиг. 2. Кроме того, устройства или системы могут быть использованы для осуществления или выполнены с возможностью осуществления логических функций, представленных на фиг. 8. В некоторых примерах компоненты устройств и/или систем могут быть выполнены с возможностью осуществления функций таким образом, что компоненты в действительности выполнены и сконструированы (с помощью аппаратных средств и/или программного обеспечения) для обеспечения таких рабочих характеристик. В других примерах компоненты устройств и/или систем могут быть расположены таким образом, что они адаптированы, выполнены или подходят для осуществления функций, например при их приведении в действие конкретным образом. Способ 200 может включать одну или более операций, функций или действий, показанных посредством одного или более блоков 202 и 204. Несмотря на то что блоки показаны в последовательном порядке, эти блоки также могут быть осуществлены параллельно и/или в порядке, отличном от порядка, описанного в данном документе. Кроме того, в зависимости от необходимой реализации различные блоки могут быть объединены в меньшее количество блоков, разделены на дополнительные блоки и/или удалены.
Следует понимать, что для этого и других процессов и способов, раскрытых в данном документе, блок-схемы иллюстрируют функциональные возможности и работу одной из возможных реализаций настоящих примеров. При этом, каждый блок может представлять модуль, сегмент или часть программного кода, который содержит одну или более инструкций, исполняемых процессором для реализации конкретных логических функций или этапов в процессе. Программный код может храниться в компьютерочитаемом носителе любого типа или хранилище данных, таком как, например, запоминающее устройство, содержащее диск или жесткий диск. Кроме того, программный код может быть зашифрован на компьютерочитаемом носителе данных в компьютерочитаемом формате или на другом носителе для длительного хранения данных, или промышленных изделиях. Компьютерочитаемый носитель может содержать компьютерочитаемый носитель для длительного хранения данных или память, такой как, например, компьютерочитаемые носители, которые хранят данные в течение коротких периодов времени аналогично памяти регистра, кэшу процессора и оперативному запоминающему устройству (RAM). Компьютерочитаемый носитель также может содержать среду для длительного хранения данных, такую как внешняя память или долговременная память, такая как, например, постоянное запоминающее устройство (ROM), оптические или магнитные диски, постоянное запоминающее устройство на компакт-дисках (CD-ROM). Компьютерочитаемый носитель также может представлять собой любые другие энергозависимые или энергонезависимые системы хранения данных. В качестве компьютерочитаемого носителя можно использовать, например, материальный компьютерочитаемый носитель данных.
Кроме того, каждый блок, показанный на фиг. 8, может представлять схему, которая присоединена проводом для осуществления конкретных логических функций в процессе. Альтернативные реализации входят в объем примеров настоящего изобретения, в которых функции могут быть осуществлены в порядке, отличном от показанного или описанного, в том числе по существу одновременно или в обратном порядке в зависимости от задействованных функциональных возможностей, что было бы лучше понятно специалистами в данной области техники.
В блоке 202 способ 200 включает прием выходных данных, характеризующих соответствующие значения давления, от множества оптических датчиков 104, установленных внутри топливного бака 102. Каждый из множества оптических датчиков 104 содержит сенсорный чип 140 и диафрагму 142, отклоняющуюся, когда давление окружающей среды отлично от опорного давления сенсорного чипа 140.
В некоторых примерах могут быть приняты дополнительные входные данные, в том числе показания датчика температуры и показания по управлению полетами для расчета измеренного значения уровня топлива в топливном баке 102 в примерах, в которых топливный бак 102 не имеет горизонтального положения.
В блоке 204 способ 200 включает определение посредством процессора или процессоров 110 измеренного значения уровня топлива в топливном баке 102 на основании выходных данных множества оптических датчиков 104. Измеренное значение уровня топлива может быть определено с использованием приведенных выше уравнений (1)-(4).
На фиг. 9 показана блок-схема примера способа для использования со способом 200 согласно примеру. В блоке 206 функции включают определение высоты топлива в топливном баке 102 на основании соотношения разницы давлений, указанных первым оптическим датчиком 104а и вторым оптическим датчиком 104b, и удельного веса топлива, содержащегося в топливном баке 102. В данном примере соответствующие положения множества оптических датчиков 104 внутри топливного бака 102 представлены высотой над днищем 162 топливного бака 102.
На фиг. 10 показана блок-схема примера способа для использования со способом 200 согласно примеру. В блоке 208 функции включают определение высоты топлива в топливном баке 102 в положении каждого из множества оптических датчиков 104 на основании соответствующих значений давления и угла наклона топливного бака 102, а в блоке 210 функции включают определение измеренного значения уровня топлива в топливном баке 102 на основании суммарного объема топлива, определяемого с учетом высоты для каждого из множества оптических датчиков 104.
Описанная система 100 может использовать оптические датчики 104 для замены существующих систем для указания количества топлива (FQIS) новым типом системы защиты от электромагнитных помех, которая не требует наличия металла в топливном баке 102. Например, при использовании волоконно-оптического жгута 106 в топливном баке 102 отсутствует необходимость в металлических проводах, а также нет необходимости в избыточных опорах. При этом необходимо исключить использование медных проводов в топливном баке 102, а использование волоконно-оптического жгута 106 позволяет этого добиться. Это уменьшает вес системы и время ее изготовления.
Примеры применения датчиков давления на фотонных кристаллах для измерения уровня топлива летательного аппарата обеспечивают возможность расчета измеренного значения уровня топлива при возникновении отклонений крыла и определенных динамических характеристиках полета. Пример преимуществ использования системы 100 включают высокоточные результаты измерения давления, которые удовлетворяют требованиям к отсутствию источников воспламенения, поскольку эта система использует маломощный полностью закрытый пучок света, не имеет взаимодействия с топливом и не имеет источников воспламенения в топливном баке 102. В системе 100 обеспечена возможность большого снижения веса по отношению к существующим системам измерения, поскольку оптические датчики 104 имеют малый вес по сравнению с существующими емкостными датчиками.
Система 100 может быть использована в областях, таких как топливные баки, среда в которых по причине условий, таких как тепло или факторы безопасности, может привести к сложным техническим проблемам.
Далее, описание включает в себя примеры согласно следующим пунктам.
Пункт 1. Система (100), содержащая:
топливный бак (102),
множество оптических датчиков (104), которые установлены внутри топливного бака (102) и каждый из которых содержит сенсорный чип (140) и диафрагму (142), отклоняющуюся, когда давление окружающей среды отлично от опорного давления сенсорного чипа (140),
волоконно-оптический жгут (106), имеющий оптическое волокно (108), соединенное с каждым из указанного множества оптических датчиков (104) для направления света в каждый из указанного множества оптических датчиков, и
один или более процессоров (110), соединенных с волоконно-оптическим жгутом (106) для приема выходных данных указанного множества оптических датчиков (104), характеризующих соответствующие значения давления, и определения измеренного значения уровня топлива в топливном баке (102) на основании выходных данных указанного множества оптических датчиков (104).
Пункт 2. Система (100) по пункту 1, в которой топливный бак (102) имеет верхнюю часть (160), днище (162) и боковины (164-170),
причем соответствующие датчики из указанного множества оптических датчиков (104) по меньшей мере расположены на одной боковине (164-170) и днище (162).
Пункт 3. Система (100) по пункту 1, в которой по мере погружения указанного множества оптических датчиков (104) в топливо в топливном баке (102) обеспечено изменение их выходных данных.
Пункт 4. Система (100) по пункту 1, в которой волоконно-оптический жгут (106) входит в топливный бак (102) в одном месте, расположен внутри топливного бака (102) и оканчивается соответствующими оптическими волокнами (108) в соответствующих положениях указанного множества оптических датчиков (104).
Пункт 5. Система (100) по пункту 1, в которой выходные данные указанного множества оптических датчиков (104) включают в себя свет, отраженный от соответствующих диафрагм (142),
причем указанные один или более процессоров (110) выполнены с возможностью определения соответствующего значения давления на основании отраженного света.
Пункт 6. Система (100) по пункту 1, в которой измеренное значение уровня топлива включает в себя объем топлива в топливном баке (102).
Пункт 7. Система (100) по пункту 1, в которой указанное множество оптических датчиков (104) также выполнены с возможностью предоставления выходных данных для определения температуры внутри топливного бака (102).
Пункт 8. Система (100) по пункту 1, также содержащая источник (126) света, соединенный с волоконно-оптическим жгутом (106) для создания света.
Пункт 9. Система (100) по пункту 1, в которой соответствующие положения указанного множества оптических датчиков (104) внутри топливного бака (102) представлены высотой над днищем топливного бака (102),
причем указанные один или более процессоров (110) выполнены с возможностью определения высоты топлива в топливном баке (102) на основании соотношения разницы давлений, указанных первым оптическим датчиком (104а) и вторым оптическим датчиком (104b), и удельного веса топлива, содержащегося в топливном баке (102).
Пункт 10. Система (100) по пункту 1, в которой указанные один или более процессоров (110) выполнены с возможностью определения удельного веса топлива, содержащегося в топливном баке (102), на основании температуры внутри топливного бака (102) и ссылки на график зависимости плотности от температуры.
Пункт 11. Система по пункту 1, в которой указанные один или более процессоров (110) выполнены с возможностью определения удельного веса топлива, содержащегося в топливном баке (102), на основании
(i) разницы между выходными данными двух датчиков из указанного множества оптических датчиков (104) для определения разницы в весе топлива и
(ii) известного расстояния между указанными двумя датчиками для расчета веса на единицу объема топлива.
Пункт 12. Система по пункту 1, в которой указанные один или более процессоров (110) дополнительно выполнены с возможностью приема информации, связанной с одним или более из следующего: крен, тангаж и рысканье топливного бака (102),
причем указанные один или более процессоров (110) выполнены с возможностью определения высоты топлива в топливном баке (102) на основании
(i) соотношения разницы давлений, указанных первым оптическим датчиком (104а) и вторым оптическим датчиком (104b), и удельного веса топлива, содержащегося в топливном баке (102), и
(ii) угла наклона топливного бака (102), определенного на основании указанной информации, связанной с одним или более из следующего: крен, тангаж и рысканье топливного бака (102).
Пункт 13. Система по пункту 1, в которой указанные один или более процессоров (110) выполнены с возможностью определения высоты топлива в топливном баке (102) в положении каждого из указанного множества оптических датчиков (104) на основании соответствующих значений давления и угла наклона топливного бака (102) и с возможностью определения измеренного значения уровня топлива в топливном баке (102) на основании суммарного объема топлива, определяемого с учетом высоты для каждого из указанного множества оптических датчиков (104).
Пункт 14. Летательный аппарат (130), содержащий:
топливный бак (102), расположенный в крыле (130) и/или фюзеляже (134) летательного аппарата (130),
множество оптических датчиков (104), которые установлены внутри топливного бака (102) и каждый из которых содержит сенсорный чип (140) и диафрагму (142), отклоняющуюся, когда давление окружающей среды отлично от опорного давления сенсорного чипа (140),
волоконно-оптический жгут (106), имеющий оптическое волокно (108), соединенное с каждым из указанного множества оптических датчиков (104) для направления света в каждый из указанного множества оптических датчиков, и
один или более процессоров (110), соединенных с волоконно-оптическим жгутом (106) для приема выходных данных указанного множества оптических датчиков (104), характеризующих соответствующие значения давления, определения измеренного значения уровня топлива в топливном баке (102) на основании выходных данных указанного множества оптических датчиков (104) и учета любых отклонений крыла и динамических характеристик полета.
Пункт 15. Летательный аппарат (130) по пункту 14, также содержащий источник (126) света, соединенный с волоконно-оптическим жгутом (106) для создания света.
Пункт 16. Летательный аппарат (130) по пункту 14, в котором соответствующие положения указанного множества оптических датчиков (104) внутри топливного бака (102) представлены высотой над днищем (162) топливного бака (102),
причем указанные один или более процессоров (110) выполнены с возможностью определения высоты топлива в топливном баке (102) на основании соотношения разницы давлений, указанных первым оптическим датчиком (104а) и вторым оптическим датчиком(104b), и удельного веса топлива, содержащегося в топливном баке (102).
Пункт 17. Летательный аппарат по пункту 14, в котором указанные один или более процессоров (110) выполнены с возможностью определения высоты топлива в топливном баке (102) в местоположении каждого из указанного множества оптических датчиков (104) на основании соответствующих значений давления и угла наклона топливного бака (102) с учетом динамических характеристик полета и с возможностью определения измеренного значения уровня топлива топливного бака (102) на основании суммарного объема топлива, определяемого с учетом высоты для каждого из указанного множества оптических датчиков (104).
Пункт 18. Способ (200) определения измеренного значения уровня топлива в топливном баке, включающий:
прием (202) от множества оптических датчиков (104), установленных внутри топливного бака (102), выходных данных, характеризующих соответствующие значения давления, причем каждый из указанного множества оптических датчиков (104) содержит сенсорный чип (140) и диафрагму (142), отклоняющуюся, когда давление окружающей среды отлично от опорного давления сенсорного чипа (140), и
определение (204) посредством одного или более процессоров (110) измеренного значения уровня топлива в топливном баке (102) на основании выходных данных указанного множества оптических датчиков (104).
Пункт 19. Способ по пункту 18, согласно которому соответствующие положения указанного множества оптических датчиков (104) внутри топливного бака (102) представлены высотой над днищем (162) топливного бака (102), а способ также включает
определение (206) высоты топлива в топливном баке (102) на основании соотношения разницы давлений, указанных первым оптическим датчиком (104а) и вторым оптическим датчиком (140b), и удельного веса топлива, содержащегося в топливном баке (102).
Пункт 20. Способ по пункту 18, также включающий: определение (208) высоты топлива в топливном баке (102) в местоположении каждого из указанного множества оптических датчиков (104) на основании соответствующих значений давления и угла наклона топливного бака (102) и
определение (210) измеренного значения уровня топлива в топливном баке (102) на основании суммарного объема топлива, определяемого с учетом высоты каждого из указанного множества оптических датчиков (104).
Описание различных предпочтительных конфигураций было представлено с целью иллюстрации и описания, при этом описание не следует считать избыточным или ограниченным раскрытыми примерами. Специалистам в данной области техники будут очевидны многие модификации или изменения. Кроме того, различные предпочтительные примеры могут описывать различные преимущества по сравнению с другими предпочтительными примерами. Отбираемый пример или отбираемые примеры выбирают и описывают для наилучшего пояснения принципов примеров, практического применения, а также для обеспечения возможности понимания специалистами в данной области техники сущности различных примеров с различными модификациями, подходящими для конкретного предполагаемого использования.




Группа изобретений относится к системе и способу для определения измеренного значения уровня топлива в топливном баке и летательному аппарату. Система содержит топливный бак, внутри которого установлены множество оптических датчиков, волоконно-оптический жгут, один или более процессоров. Для определения измеренного значения уровня топлива в топливном баке принимают от множества оптических датчиков выходные данные, характеризующие соответствующие значения давления, определяют посредством одного или более процессоров измеренное значение уровня топлива в топливном баке на основании выходных данных. Летательный аппарат содержит топливный бак, расположенный в крыле и/или фюзеляже летательного аппарата, и систему для определения измеренного значения уровня топлива. Обеспечивается повышение надежности измерения количества топлива в топливном баке, снижение веса и упрощение конструкции системы. 3 н. и 17 з.п. ф-лы, 10 ил.
1. Система для измерения уровня топлива в топливном баке, содержащая:
топливный бак,
множество оптических датчиков, которые установлены внутри топливного бака и каждый из которых содержит сенсорный чип и диафрагму, отклоняющуюся, когда давление окружающей среды отлично от опорного давления сенсорного чипа,
волоконно-оптический жгут, имеющий оптическое волокно, соединенное с каждым из указанного множества оптических датчиков для направления света в каждый из указанного множества оптических датчиков, и
один или более процессоров, соединенных с волоконно-оптическим жгутом для приема выходных данных указанного множества оптических датчиков, характеризующих соответствующие значения давления, и определения измеренного значения уровня топлива в топливном баке на основании выходных данных указанного множества оптических датчиков.
2. Система по п. 1, в которой топливный бак имеет верхнюю часть, днище и боковины,
причем соответствующие датчики из указанного множества оптических датчиков расположены по меньшей мере на одной боковине и днище.
3. Система по п. 1 или 2, в которой по мере погружения указанного множества оптических датчиков в топливо в топливном баке обеспечено изменение их выходных данных.
4. Система по п. 1 или 2, в которой волоконно-оптический жгут входит в топливный бак в одном месте, расположен внутри топливного бака и оканчивается соответствующими оптическими волокнами в соответствующих положениях указанного множества оптических датчиков.
5. Система по п. 1 или 2, в которой выходные данные указанного множества оптических датчиков включают в себя свет, отраженный от соответствующих диафрагм,
причем указанные один или более процессоров выполнены с возможностью определения соответствующего значения давления на основании отраженного света.
6. Система по п. 1 или 2, в которой измеренное значение уровня топлива включает в себя объем топлива в топливном баке.
7. Система по п. 1 или 2, в которой указанное множество оптических датчиков также выполнены с возможностью предоставления выходных данных для определения температуры внутри топливного бака.
8. Система по п. 1 или 2, также содержащая источник света, соединенный с волоконно-оптическим жгутом для создания света.
9. Система по п. 1 или 2, в которой соответствующие положения указанного множества оптических датчиков внутри топливного бака представлены высотой над днищем топливного бака,
причем указанные один или более процессоров выполнены с возможностью определения высоты топлива в топливном баке на основании соотношения разницы давлений, указанных первым оптическим датчиком и вторым оптическим датчиком, и удельного веса топлива, содержащегося в топливном баке.
10. Система по п. 1 или 2, в которой указанные один или более процессоров выполнены с возможностью определения удельного веса топлива, содержащегося в топливном баке, на основании температуры внутри топливного бака и ссылки на график зависимости плотности от температуры.
11. Система по п. 1 или 2, в которой указанные один или более процессоров выполнены с возможностью определения удельного веса топлива, содержащегося в топливном баке, на основании
(i) разницы между выходными данными двух датчиков из указанного множества оптических датчиков для определения разницы в весе топлива и
(ii) известного расстояния между указанными двумя датчиками для расчета веса на единицу объема топлива.
12. Система по п. 1 или 2, в которой указанные один или более процессоров дополнительно выполнены с возможностью приема информации, связанной с одним или более из следующего: крен, тангаж и рысканье топливного бака,
причем указанные один или более процессоров выполнены с возможностью определения высоты топлива в топливном баке на основании
(i) соотношения разницы давлений, указанных первым оптическим датчиком и вторым оптическим датчиком, и удельного веса топлива, содержащегося в топливном баке, и
(ii) угла наклона топливного бака, определенного на основании указанной информации, связанной с одним или более из следующего: крен, тангаж и рысканье топливного бака.
13. Система по п. 1 или 2, в которой указанные один или более процессоров выполнены с возможностью определения высоты топлива в топливном баке в положении каждого из указанного множества оптических датчиков на основании соответствующих значений давления и угла наклона топливного бака и с возможностью определения измеренного значения уровня топлива в топливном баке на основании суммарного объема топлива, определяемого с учетом высоты для каждого из указанного множества оптических датчиков.
14. Летательный аппарат, содержащий:
топливный бак, расположенный в крыле и/или фюзеляже летательного аппарата,
множество оптических датчиков, которые установлены внутри топливного бака и каждый из которых содержит сенсорный чип и диафрагму, отклоняющуюся, когда давление окружающей среды отлично от опорного давления сенсорного чипа,
волоконно-оптический жгут, имеющий оптическое волокно, соединенное с каждым из указанного множества оптических датчиков для направления света в каждый из указанного множества оптических датчиков, и
один или более процессоров, соединенных с волоконно-оптическим жгутом для приема выходных данных указанного множества оптических датчиков, характеризующих соответствующие значения давления, определения измеренного значения уровня топлива в топливном баке на основании выходных данных указанного множества оптических датчиков и учета любых отклонений крыла и динамических характеристик полета.
15. Летательный аппарат по п. 14, также содержащий источник света, соединенный с волоконно-оптическим жгутом для создания света.
16. Летательный аппарат по п. 14 или 15, в котором соответствующие положения указанного множества оптических датчиков внутри топливного бака представлены высотой над днищем топливного бака,
причем указанные один или более процессоров выполнены с возможностью определения высоты топлива в топливном баке на основании соотношения разницы давлений, указанных первым оптическим датчиком и вторым оптическим датчиком, и удельного веса топлива, содержащегося в топливном баке.
17. Летательный аппарат по п. 14 или 15, в котором указанные один или более процессоров выполнены с возможностью определения высоты топлива в топливном баке в положении каждого из указанного множества оптических датчиков на основании соответствующих значений давления и угла наклона топливного бака с учетом динамических характеристик полета и с возможностью определения измеренного значения уровня топлива топливного бака на основании суммарного объема топлива, определяемого с учетом высоты для каждого из указанного множества оптических датчиков.
18. Способ определения измеренного значения уровня топлива в топливном баке, включающий:
прием от множества оптических датчиков, установленных внутри топливного бака, выходных данных, характеризующих соответствующие значения давления, причем каждый из указанного множества оптических датчиков содержит сенсорный чип и диафрагму, отклоняющуюся, когда давление окружающей среды отлично от опорного давления сенсорного чипа, и
определение посредством одного или более процессоров измеренного значения уровня топлива в топливном баке на основании выходных данных указанного множества оптических датчиков.
19. Способ по п. 18, согласно которому соответствующие положения указанного множества оптических датчиков внутри топливного бака представлены высотой над днищем топливного бака, а способ также включает
определение высоты топлива в топливном баке на основании соотношения разницы давлений, указанных первым оптическим датчиком и вторым оптическим датчиком, и удельного веса топлива, содержащегося в топливном баке.
20. Способ по п. 18, также включающий:
определение высоты топлива в топливном баке в положении каждого из указанного множества оптических датчиков на основании соответствующих значений давления и угла наклона топливного бака и
определение измеренного значения уровня топлива в топливном баке на основании суммарного объема топлива, определяемого с учетом высоты каждого из указанного множества оптических датчиков.
| ВОЛОКОННО-ОПТИЧЕСКИЙ УРОВНЕМЕР И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2014 |
|
RU2564683C1 |
| Причальная цилиндрическая пала | 1927 |
|
SU18292A1 |
| US 0005026984 A1, 25.06.1991 | |||
| US 20160231231 A1, 11.08.2016 | |||
| ОТВЕРЖДАЮЩАЯСЯ, СОСТОЯЩАЯ ИЗ ДВУХ ЧАСТЕЙ АКРИЛОВАЯ КОМПОЗИЦИЯ | 2009 |
|
RU2503466C2 |

