ОБЛАСТЬ ТЕХНИКИ И УРОВЕНЬ ТЕХНИКИ
[001] Раскрытие настоящего изобретения относится в целом к летательным аппаратам, а в частности к способам и устройствам для управления плавным увеличением тяги двигателя летательного аппарата.
[002] На начальном этапе взлета при небольшой путевой скорости можно ограничивать тягу двигателя или ею можно управлять, чтобы уменьшить нагрузку на двигатель. Например, ограничение доступной тяги во время взлета при некоторых параметрах бокового ветра уменьшает износ двигателей летательных аппаратов, что приводит к уменьшению затрат на техническое обслуживание и/или уменьшению шума.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[003] На ФИГ. 1 показан пример летательного аппарата, реализованного с помощью приведенной в качестве примера системы плавного увеличения тяги, в соответствии с идеями раскрытия настоящего изобретения.
[004] На ФИГ. 2 показана блок-схема приведенного в качестве примера устройства управления плавным увеличением тяги для примера системы плавного увеличения тяги по ФИГ. 1.
[005] На ФИГ. 3А и 3В показаны структурные схемы, на которых представлены приведенные в качестве примеров способы, которые могут быть осуществлены для реализации приведенного в качестве примера устройства управления плавным увеличением тяги по ФИГ. 1 и 2.
[006] На ФИГ. 4 показан график, представляющий режимы плавного увеличения тяги, которые могут быть использованы приведенным в качестве примера устройством управления плавным увеличением тяги по ФИГ. 1 и 2.
[007] На ФИГ. 5 показана блок-схема приведенной в качестве примера процессорной платформы, выполненной с возможностью исполнения инструкций для реализации способов по ФИГ. 3А и 3В, и приведенного в качестве примера устройства управления плавным увеличением тяги по ФИГ. 1 и 2.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[008] Приведенная в качестве примера система управления тягой включает в себя датчик для измерения скорости бокового ветра и блок управления тягой для сравнения измеренной скорости бокового ветра с диапазоном пороговых значений бокового ветра. Блок управления тягой выполнен с возможностью приведения в действие режима частичного плавного увеличения тяги во время взлета, когда измеренная скорость бокового ветра находится в пределах диапазона пороговых значений бокового ветра. Режим частичного плавного увеличения тяги выбирают из множества режимов плавного увеличения тяги.
[009] Приведенный в качестве примера способ включает измерение скорости бокового ветра при выруливании летательного аппарата; сравнение измеренной скорости бокового ветра с диапазоном пороговых значений бокового ветра и приведения в действие режима частичного плавного увеличения тяги во время взлета на основе измеренной скорости бокового ветра, когда измеренная скорость бокового ветра находится в пределах диапазона пороговых значений бокового ветра.
[0010] Приведенный в качестве примера материальный компьютерочитаемый носитель данных включает в себя инструкции, которые при своем исполнении побуждают машину измерять скорость бокового ветра; сравнивать измеренную скорость бокового ветра с диапазоном пороговых значений бокового ветра и приводить в действие режим частичного плавного увеличения тяги во время взлета на основе измеренной скорости бокового ветра, когда измеренная скорость бокового ветра находится в пределах диапазона пороговых значений бокового ветра.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0011] Неблагоприятные аэродинамические условия на входном отверстии двигателя летательного аппарата оказывают влияние на характеристики двигателя.
Например, во время взлета боковой ветер может обусловливать разделение воздушного потока, проходящего через входное отверстие двигателя, вдоль внутренней поверхности входного отверстия по мере перемещения воздушного потока по направлению к ротору или вентилятору двигателя. Такое разделение воздушного потока может приводить к недостаточной аэродинамике в отношении лопастей вентилятора внутри двигателя, когда ротор или вентилятор разгоняется слишком быстро при неблагоприятных аэродинамических условиях. Например, неблагоприятные аэродинамические условия могут сообщать вибрационные силы лопастям вентилятора, которые могут вызвать износ и/или повреждение лопастей вентилятора, что приводит к более частой замене лопастей или более объемному техническому обслуживанию лопастей. Таким образом, вследствие параметров бокового ветра во время взлета скорость разгона ротора или лопасти вентилятора может влиять на программу технического обслуживания, необходимого для двигателя. Более объемное техническое обслуживание приводит к увеличению затрат и/или выводу летательного аппарата из парка доступных воздушных судов.
[0012] Для уменьшения или предотвращения повреждения двигателя летательного аппарата вследствие параметров бокового ветра во время взлета, мощность или тяга двигателя может быть ограничена (например, меньше полной доступной мощности) и/или корректироваться (например, последовательно корректироваться) постепенно для управления скоростью разгона ротора или вентилятора до тех пор, пока скорость летательного аппарата (например, поступательная скорость воздушного потока, параллельная продольной оси двигателя летательного аппарата) не станет такой, при которой на входном отверстии двигателя исчезает неблагоприятная аэродинамика. Например, когда воздушный поток (например, относительная скорость воздушного потока) во входное отверстие двигателя достигает определенной скорости (например, когда летательный аппарат достигнет порогового значения относительной скорости, подходящей для отрыва от земли), боковой ветер воздушного потока, перпендикулярный входному отверстию двигателя летательного аппарата, пренебрежимо мал по сравнению с воздушным потоком, параллельным входному отверстию двигателя летательного аппарата. Иными словами, когда летательный аппарат развивает достаточную воздушную скорость, вектор воздушного потока, поступающего во входное отверстие, параллельный продольной оси двигателя, значительно больше, чем вектор воздушного потока бокового ветра, который является непараллельным (например, перпендикулярным) продольной оси впускного отверстия летательного аппарата. Таким образом, когда летательный аппарат достигает конкретной воздушной скорости, воздействие бокового ветра становится пренебрежимо малым и больше не влияет на работу двигателя и/или техническое обслуживание двигателя летательного аппарата.
[0013] Для уменьшения износа двигателя вследствие бокового ветра с неблагоприятными параметрами во время части этапа взлета, в некоторых приведенных в качестве примеров летательных аппаратах используются системы плавного увеличения тяги для ограничения выходной тяги двигателя. Например, плавное увеличение тяги ограничивает скорость разгона ротора или вентилятора, когда летательный аппарат движется с относительно небольшими путевыми скоростями. Например, системы плавного увеличения тяги могут приводить к тому, что электронное устройство управления двигателем компенсирует высокие нагрузки на лопасти вентилятора, возникающие вследствие бокового ветра и небольших путевых скоростей, посредством медленного увеличения тяги до достижения величины порогового значения воздушной скорости, при которой боковой ветер больше не влияет на аэродинамические характеристики двигателя. Такое пороговое значение воздушной скорости зависит от рабочих характеристик двигателя (например, входного отверстия гондолы).
[0014] Однако некоторые системы плавного увеличения тяги приведены в действие при выполнении взлетов всех видов независимо от того, требуют ли параметры бокового ветра ограничения тяги. Например, ограничения на значение тяги могут быть наложены, когда параметры бокового ветра (например, скорость бокового ветра величиной 10 узлов или менее) не влияют на работу двигателя (например, позволяют использование полной доступной тяги). Кроме того, некоторые системы плавного увеличения тяги применяют одинаковое ограничение тяги для всех параметров бокового ветра. Например, некоторые системы ограничения тяги могут вводить одно и то же ограничение тяги, когда параметры боковой скорости составляют 12 узлов (22,2 км/ч) или 30 узлов (55,6 км/ч).
[0015] Хотя плавное увеличение тяги во время взлета уменьшает механическое напряжение на двигателе летательного аппарата во время большого бокового ветра, ограничение тяги во время взлета влияет на скорость взлета и вес летательного аппарата. Например, более тяжелый летательный аппарат требует большей скорости для отрыва от земли. Таким образом, ограничение тяги во время взлета может потребовать более длинной взлетно-посадочной полосы для достижения надлежащих скоростей взлета вследствие задействованных ограничений тяги в течение этапа взлета. Таким образом, системы плавного увеличения тяги могут обусловливать ухудшение характеристик летательного аппарата, касающихся взлетной дистанции и/или полезной нагрузки. Например, системы плавного увеличения тяги могут обусловливать небольшое увеличение взлетной дистанции на величину 120 футов (36,6 м) при высоте взлетно-посадочной полосы, составляющей 14000 футов (4267 м). В результате, для летательных аппаратов, оснащенных системами плавного увеличения тяги, могут потребоваться более длинные взлетно-посадочные полосы и/или может потребоваться уменьшение нагрузки (например, перевоз груза, который меньше максимальной разрешенной нагрузки). Таким образом, некоторые системы плавного увеличения тяги могут привести к тому, что летательный аппарат будет работать с меньшей эффективностью вследствие ограничения нагрузки в условиях бокового ветра, параметры которого могут не требовать ограничений тяги или плавного увеличения тяги во время взлета.
[0016] Приведенные в качестве примеров способы и устройства, раскрытые в настоящем документе, по выбору включения плавного увеличения тяги на основании параметров взлета (например, параметров боковой скорости). В частности, в отличие от некоторых систем плавного увеличения тяги, приведенные в качестве примеров способы и устройства, раскрытые в настоящем документе, используют управление тягой или плавное увеличение тяги на основании измеренного бокового ветра, определенного во время выруливания. Например, приведенный в качестве примера способ, раскрытый в настоящем документе, включает измерение скорости бокового ветра во время выруливания (например, когда летательный аппарат неподвижен) и сравнение измеренной скорости бокового ветра с диапазоном пороговых значений бокового ветра. В некоторых примерах способы и устройства, раскрытые в настоящем документе, обеспечивают ограничение значений тяги и/или обеспечивают плавное увеличение тяги, когда скорость бокового ветра больше, чем пороговое значение бокового ветра. Таким образом, приведенные в качестве примеров способы и устройства, раскрытые в настоящем документе, могут не применять ограничения тяги и/или плавное увеличение тяги, когда измеренный боковой ветер меньше порогового значения бокового ветра. Таким образом, летательный аппарат может использовать всю доступную тягу во время взлетов при боковом ветре с неблагоприятными параметрами (например, такими параметрами бокового ветра, которые не требуют плавного увеличения тяги). В некоторых таких случаях выполнение взлета летательного аппарата может быть реализовано, когда плавное увеличение тяги не приведено в действие. Например, без плавного увеличения тяги, летательный аппарат может взлетать с использованием более короткой взлетно-посадочной полосы и/или может взлетать с более тяжелой полезной нагрузкой (например, грузом).
[0017] Кроме того, приведенные в качестве примеров способы и устройства, раскрытые в настоящем документе, используют множество различных режимов плавного увеличения тяги, соответствующих различным измеренным параметрам бокового ветра. Приведенные в качестве примеров способы и устройства, раскрытые в настоящем документе, используют частичное плавное увеличение тяги, когда измеренная скорость бокового ветра находится в пределах диапазона пороговых значений бокового ветра, и используют полное плавное увеличение тяги, когда измеренная скорость бокового ветра превышает верхний предел диапазона пороговых значений бокового ветра.
[0018] В некоторых примерах частичное плавное увеличение тяги обеспечивает масштабированное или оптимизированное плавное увеличение тяги для измеренной скорости бокового ветра. Таким образом, когда частичное плавное увеличение тяги приведено в действие, режим плавного увеличения тяги выбирают на основе измеренной скорости бокового ветра. Например, выбирают первый режим плавного увеличения тяги, когда измеренная скорость бокового ветра имеет первую величину в пределах диапазона пороговых значений бокового ветра, и второй режим плавного увеличения тяги, когда измеренная скорость бокового ветра имеет вторую величину в пределах диапазона пороговых значений бокового ветра. Например, ограничение выходной тяги первого режима плавного увеличения тяги, выбранное на основании первой измеренной скорости бокового ветра, может быть меньше ограничения выходной тяги второго режима плавного увеличения тяги, выбранного на основании второй измеренной скорости бокового ветра (например, при верхнем пределе диапазона пороговых значений бокового ветра). Например, режим плавного увеличения тяги, связанный с измеренной скоростью бокового ветра, составляющей приблизительно 15 узлов (27,8 км/ч), может ограничивать начальное значение тяги величиной приблизительно 80% от доступной тяги двигателя, а режим плавного увеличения тяги, связанный с измеренной скоростью бокового ветра, составляющей приблизительно 25 узлов (46,3 км/ч), может ограничивать начальное значение тяги величиной приблизительно 50% от доступной тяги двигателя. Кроме того, в некоторых примерах скорость разгона двигателя между начальным ограничением тяги и полной доступной тягой изменяется с помощью различных режимов плавного увеличения тяги. Например, скорость разгона согласно первому режиму плавного увеличения тяги, связанному с относительно небольшими скоростями бокового ветра, может быть больше, чем скорость разгона согласно второму режиму плавного увеличения тяги, связанному с относительно большими скоростями бокового ветра.
[0019] Режим полного плавного увеличения тяги выбирают, когда измеренная величина бокового ветра больше, чем верхний предел диапазона пороговых значений бокового ветра. Например, один и тот же режим полного плавного увеличения тяги применяют для всех измеренных скоростей бокового ветра, которые больше, чем верхний предел диапазона пороговых значений бокового ветра. Таким образом, для всех величин бокового ветра больше, чем, например, 30 узлов (55,6 км/ч), приводят в действие режим полного плавного увеличения тяги. Плавное увеличение тяги отключают, когда измеренная скорость бокового ветра меньше, чем нижний предел диапазона пороговых значений бокового ветра. Таким образом, приведенные в качестве примеров способы, раскрытые в настоящем документе, не ограничивают значения тяги во время взлета, когда функция плавного увеличения тяги отключена.
[0020] На ФИГ. 1 показан приведенный в качестве примера летательный аппарат 100, реализованный с помощью системы 102 управления тягой, также называемой в настоящем документе системой 102 плавного увеличения тяги, в соответствии с идеями раскрытия настоящего изобретения. Летательный аппарат 100 представлен в качестве примера и, таким образом, приведенные в качестве примеров способы и устройства, раскрытые в настоящем документе, могут быть реализованы с другими летательными аппаратами, космическими аппаратами или транспортными средствами без отхода от сущности и объема раскрытия настоящего изобретения. Приведенный в качестве примера летательный аппарат 100 согласно показанному примеру представляет собой коммерческий летательный аппарат, имеющий первое крыло 104 и второе крыло 106, проходящие от фюзеляжа 108. Летательный аппарат 100 согласно показанному примеру включает в себя первый двигатель 110, соединенный с первым крылом 104 и второй двигатель 112, соединенный со вторым крылом 106. Команды управления выходной тягой первого двигателя 110 и второго двигателя 112 передают с помощью рычага 114 управления тягой, расположенного в кабине 115 летательного аппарата 100. Например, во время эксплуатации, рычагом 114 управления тягой манипулируют для выдачи команд управления выходной тягой первого двигателя 110 и второго двигателя 112.
[0021] Для управления работой (например, выходной тягой) первого двигателя 110 и второго двигателя 112 на основании команд управления тягой, подаваемых рычагом 114 управления тягой, каждый из двигателей 110 и 112 согласно показанному примеру использует электронное устройство 116 управления двигателем. Например, электронное устройство 116 управления двигателем определяет величину мощности или выходной тяги согласно командам от первого двигателя 110 и второго двигателя 112 посредством рычага 114 управления тягой. Кроме того, электронное устройство 116 управления двигателем согласно показанному примеру определяет или принимает рабочую характеристику (рабочие характеристики) (например, скорость летательного аппарата, угол атаки, высоту, статическое и/или динамическое давление воздуха, воздушную скорость, плотность воздуха, температуру воздуха, давление воздуха, давление двигателя, температуру двигателя и т.д.) для достижения тяги, установленной рычагом 114 управления тягой. Например, электронное устройство 116 управления двигателем вычисляет скорость вентилятора для достижения тяги, соответствующей командам управления тягой, вводимым рычагом 114 управления тягой. На основании требуемой мощности или выходной тяги и/или рабочей характеристики (рабочих характеристик) электронные устройства 116 управления двигателями регулируют поток топлива (например, на основании соотношения топливо-воздух), поступающего в первый двигатель 110 и второй двигатель 112.
[0022] Во время взлета, летательный аппарат 100 согласно показанному примеру по выбору приводит в действие плавное увеличение тяги во время бокового ветра с определенным параметром (определенными параметрами). Например, летательный аппарат 100 согласно показанному примеру ограничивает скорость разгона вентилятора первого двигателя 110 и второго двигателя 112 во время бокового ветра с неблагоприятными параметрами, который в противном случае может привести к повреждению вентиляторов (например, лопастей вентилятора) двигателей 110 и 112, когда путевая скорость летательного аппарата 100 относительно мала. Например, во время относительно небольших путевых скоростей, большой боковой ветер 118, дующий перпендикулярно продольным осям 120 входных отверстий 122 первого двигателя 110 и второго двигателя 112, может вызвать разделение потока вдоль внутренней поверхности входных отверстий 122. Такое разделение потока может вызвать турбулентный поток, который может привести к повреждению лопастей вентилятора первого двигателя 110 и/или второго двигателя 112, если скорость разгона двигателей 110 и 112 увеличивается слишком быстро. По мере увеличения воздушной скорости 124 летательного аппарата 100 (например, в прямом направлении, параллельном продольным осям 120), боковой ветер с неблагоприятными параметрами больше не влияет на характер воздушного потока, поступающего во входное отверстие 122.
[0023] Для выборочного ограничения скорости разгона первого двигателя 110 и второго двигателя 112, приведенный в качестве примера летательный аппарат 100 согласно показанному примеру использует систему 102 плавного увеличения тяги. В частности, приведенная в качестве примера система 102 плавного увеличения тяги согласно показанному примеру использует ограничения выходной тяги для управления скоростью разгона первого двигателя 110 и второго двигателя 112, когда система 102 плавного увеличения тяги регистрирует определенный рабочий параметр (параметры). В некоторых примерах система 102 плавного увеличения тяги согласно показанному примеру обеспечивает плавное увеличение тяги по требованию. Например, система 102 плавного увеличения тяги согласно показанному примеру определяет необходимость плавного увеличения тяги посредством измерения скорости бокового ветра при выруливании летательного аппарата (например, перед взлетом). Например, система 102 плавного увеличения тяги согласно показанному примеру измеряет скорости бокового ветра, когда летательный аппарат 100 неподвижен (например, начальную скорость бокового ветра). Например, когда летательный аппарат 100 неподвижен, путевая скорость летательного аппарата 100 равна нулю и измеренный воздушный поток равен скорости ветра. Вектор скорости ветра может быть подвергнут анализу для определения скорости бокового ветра 118. На основании скорости бокового ветра система 102 плавного увеличения тяги согласно показанному примеру может ограничивать выходную тягу во время взлета, когда параметры бокового ветра, измеренные во время выруливания, больше порогового значения бокового ветра (например, больше 12 узлов (22,2 км/ч)).
[0024] Кроме того, как описано более подробно ниже, приведенная в качестве примера система плавного увеличения тяги согласно показанному примеру задействует различные режимы плавного увеличения тяги, имеющие различные ограничения выходной тяги, на основе измеренной скорости бокового ветра. Когда приведено в действие плавное увеличение тяги для управления скоростью разгона вентиляторов первого двигателя 110 и второго двигателя 112, система плавного увеличения тяги согласно показанному примеру увеличивает выходную тягу от начального ограничения выходной тяги до значения всей доступной выходной тяги как функцию измеренной воздушной скорости летательного аппарата 100 во время взлета. Например, система 102 плавного увеличения тяги согласно показанному примеру ограничивает выходную тягу во время начального участка взлета и постепенно увеличивает выходную тягу до тех пор, пока не будет доступна вся имеющаяся выходная тяга. Система 102 плавного увеличения тяги может быть соединена с возможностью передачи данных с электронными устройствами 116 управления двигателями посредством оптоволоконного кабеля 126, беспроводной системы, сотовой системы и/или любой другой подходящей системы (любых других подходящих систем) связи. В некоторых примерах система 102 плавного увеличения тяги может быть образована с помощью электронных устройств 116 управления двигателями (например, встроена в них).
[0025] Для регистрации или измерения воздушных параметров, связанных с воздушным потоком (например, скоростью бокового ветра и т.д.) и/или воздушной скоростью летательного аппарата 100, приведенная в качестве примера система 102 плавного увеличения тяги согласно показанному примеру использует систему 130 оптических датчиков (например, систему на основе лидарных датчиков). Система 130 оптических датчиков согласно показанному примеру включает в себя множество датчиков 132, соединенных с возможностью передачи данных с устройством 134 управления плавным увеличением тяги (например, блоком обработки сигналов датчиков), который анализирует сигналы от датчиков 132 для определения или измерения (например, расчета) воздушных параметров, таких как скорость ветра. Иными словами, система 130 оптических датчиков согласно показанному примеру регистрирует боковой ветер 118 и воздушную скорость 124 летательного аппарата 100 (например, скорость летательного аппарата 100 относительно воздушного потока). Например, когда летательный аппарат 100 не движется (например, путевая скорость равна нулю), датчик 132 измеряет скорость ветра воздушного потока. Когда летательный аппарат 100 движется относительно земли, датчики 132 измеряют воздушную скорость летательного аппарата 100.
[0026] В показанном примере каждый из датчиков 132 соединен с возможностью передачи данных с устройством 134 управления плавным увеличением тяги посредством кабеля 136 (например, оптоволоконного кабеля). В некоторых примерах система 130 оптических датчиков может быть использована для измерения или определения других воздушных параметров или рабочей характеристики (рабочих характеристик), таких как, например, давление воздуха, высота, температура воздуха, плотность воздуха и/или другой рабочей характеристики (других рабочих характеристик). В некоторых таких примерах рабочая характеристика (рабочие характеристики) может быть передана на электронные устройства 116 управления двигателями и/или другую систему (другие системы) управления летательного аппарата 100 (например, электронно-цифровое устройство управления с полной ответственностью, FADEC)). В некоторых примерах летательный аппарат 100 может использовать другие датчики для обеспечения выдачи рабочей характеристики (рабочих характеристик) на электронные устройства 116 управления двигателями, такой как, например, давление воздуха, высота, температура воздуха, температура двигателя, давление в двигателе и т.д. В некоторых примерах информация или данные (например, опорная величина бокового ветра) могут быть предоставлены в систему 102 плавного увеличения тяги и/или электронное устройство 116 управления двигателем посредством интерфейса 138 ввода/вывода данных (например, дисплея, сенсорного экрана, визуального индикатора и т.д.), расположенного в кабине 115 летательного аппарата 100.
[0027] Датчики 132 согласно показанному примеру включают в себя первый датчик 132а, второй датчик 132b и третий датчик 132с. В частности, первый датчик 132а размещен возле первой стороны 140 (например, правой стороны) летательного аппарата 100, второй датчик 132b размещен возле второй стороны 142 (например, левой стороны) летательного аппарата 100 напротив первой стороны 140, а третий датчик 132с размещен возле носовой части 144 летательного аппарата 100. Например, первый датчик 132а может регистрировать или определять воздушные параметры (например, скорость ветра, относительную скорость и т.д.) воздушного потока возле первого двигателя 110 или первой стороны 140 летательного аппарата 100, второй датчик 132b может регистрировать или определять воздушные параметры (например, скорость ветра, относительную скорость и т.д.) воздушного потока возле второго двигателя 112 или второй стороны 142, а третий датчик 132с может регистрировать или определять воздушные параметры (например, скорость ветра, относительную скорость и т.д.) воздушного потока возле носовой части 144 летательного аппарата 100. Таким образом, если боковой ветер 118 дует в направлении от второго двигателя 112 к первому двигателю 110 при ориентации по ФИГ. 1, фюзеляж 108 может блокировать первый датчик 132 или мешать ему точно измерить боковой ветер 118. В некоторых таких случаях второй датчик 132b и/или третий датчик 132с может регистрировать боковой ветер 118 (например, скорость бокового ветра). В некоторых примерах информация, предоставляемая первым датчиком 132а, может быть использована в сочетании с информацией, представляемой вторым датчиком 132b и/или третьим датчиком 132с, для регистрации воздушных параметров или рабочей характеристики (рабочих характеристик). Например, характеристика (характеристики) воздушного потока, предоставляемая (предоставляемые) каждым из датчиков 132, может быть использована (могут быть использованы) для отображения или построения графиков полных характеристик воздушного потока относительно летательного аппарата 100. Хотя примеры, показанные на ФИГ. 1, иллюстрируют множество датчиков 132, приведенная в качестве примера система 130 оптических датчиков, раскрытая в настоящем документе, может быть реализована с помощью только одного датчика, двух датчиков или более чем трех датчиков.
[0028] Приведенные в качестве примеров датчики 132 согласно показанному примеру являются датчиками или приемопередатчиками лазерной локации (например, лидарными датчиками). Например, каждый из датчиков 132 согласно показанному примеру включает в себя лазерный передатчик и приемник. Датчики 132 согласно показанному примеру могут быть установлены на фюзеляже 108 летательного аппарата 100. В некоторых примерах датчики 132 могут быть расположены внутри фюзеляжа 108 и расположены так, чтобы излучать энергию лазера через окно летательного аппарата 100. В некоторых примерах датчики 132 могут быть установлены на внешней поверхности летательного аппарата 100 (например, аэродинамической поверхности крыла и/или первого двигателя 110, второго двигателя 112 и/или носовой части 144). В некоторых примерах датчики 132 согласно показанному примеру могут быть установлены заподлицо с внешней поверхностью (например, аэродинамической поверхностью, фюзеляжем и т.д.) летательного аппарата 100 таким образом, что датчики 132 не мешают, не нарушают, не изменяют и/или не нарушают (например, конфигурацию или профиль) воздушного потока, движущегося по внешней поверхности (например, фюзеляжу и/или аэродинамической поверхности), на которой установлены датчики 132. В некоторых примерах одно или более покрытий (например, прозрачные покрытия) могут быть расположены поверх лазерных передатчика и/или приемника.
[0029] Для измерения воздушной скорости, скорости ветра, бокового ветра и/или иных воздушных параметров или характеристики (характеристик), система 130 оптических датчиков характеризует или анализирует объем воздуха и/или воздушное облако (например, воздушные частицы, молекулы воздуха, капли жидкости и т.д.). Чтобы охарактеризовать или проанализировать объем воздуха или воздушное облако, приведенные в качестве примеров датчики 132 вырабатывают или излучают лазерный луч или лазерную энергию (например, излучение с одной или более длинами волн и т.д.), например, от передатчика. Например, для измерения трехмерного вектора скорости воздушного потока (например, вектора скорости ветра) каждый из датчиков 132 (например, передатчик датчика) излучает три лазерных луча 150 (например, перпендикулярно датчику и/или фюзеляжу) для измерения трех различных векторов скорости под различными заданными углами по отношению к передатчику и/или фюзеляжу 108. В некоторых примерах лазерная энергия (например, непрерывная или импульсная), которая передается в атмосферу, рассеивается обратно воздушным облаком (например, вследствие столкновений с воздушными частицами, молекулами воздуха и т.д.), при этом отраженную и рассеянную назад лазерную энергию принимают приемники датчиков 132. Как описано более подробно ниже в связи с ФИГ. 2, устройство 134 управления плавным увеличением тяги согласно показанному примеру преобразует или модифицирует лазерную энергию обратного рассеяния с выработкой электронных сигналов для измерения скорости воздушного потока.
[0030] На ФИГ. 2 показана блок-схема приведенного в качестве примера устройства 134 управления плавным увеличением тяги по ФИГ. 1. Приведенное в качестве примера устройство 134 управления плавным увеличением тяги согласно показанному примеру включает в себя приведенные в качестве примеров лазерный дальномерный блок 202, блок 204 управления плавным увеличением тяги, хранилище 206 данных (например, запоминающее устройство) и контроллер 208 предупредительных сигналов.
[0031] Приведенный в качестве примера лазерный дальномерный блок 202 согласно показанному примеру анализирует сигналы от датчиков 132 по ФИГ. 1 для определения данных воздушного потока и/или рабочей характеристики (рабочих характеристик), такой как, например, боковой ветер и воздушная скорость. Лазерный дальномерный блок 202 согласно показанному примеру включает в себя приведенный в качестве примера сигнальный процессор 210, который принимает сигналы (например, лазерную энергию обратного рассеяния) от приемника датчиков 132 по ФИГ. 1. Например, сигналы, выдаваемые датчиками 132 на сигнальный процессор 210, могут быть данными (например, необработанными данными), относящимися к информации, обеспечиваемой лазерной энергией обратного рассеяния. Приведенный в качестве примера сигнальный процессор 210 преобразует такую информацию в электронные сигналы, которые могут быть обработаны компьютером и могут быть использованы для определения рабочей характеристики (рабочих характеристик) и/или параметров воздушного потока. Например, сигнальный процессор 210 может включать в себя, например, аналого-цифровой (A/D) преобразователь и/или оптический преобразователь для преобразования данных от датчиков 132 в электронные сигналы (например, цифровые электронные сигналы).
[0032] Преобразованную или модифицированную лазерную энергию обратного рассеяния (например, электронные сигналы) после этого обрабатывают или анализируют для измерения воздушных параметров (например, скорости ветра). Для измерения скорости воздушного потока, лазерный дальномерный блок 202 согласно показанному примеру включает в себя устройство 212 определения скорости воздушного потока. Устройство 212 определения скорости воздушного потока принимает электронные сигналы от сигнального процессора 210 и обрабатывает электронные сигналы для определения скорости воздушного потока относительно летательного аппарата 100 с использованием, например, алгоритмов, применяющих уравнение скорости на основе доплеровского эффекта для определения воздушного потока или скорости ветра исходя из анализа частотного сдвига. Например, приведенный в качестве примера сигнальный процессор 210 регистрирует величину доплеровского сдвига между светом передачи и светом приема для измерения скорости воздушного потока. В некоторых примерах лазерная энергия обратного рассеяния может быть обработана для определения или измерения температуры воздуха, давления воздуха, плотности воздуха и/или других воздушных параметров или характеристики (характеристик).
[0033] Для определения или измерения воздушной скорости летательного аппарата 100 лазерный дальномерный блок 202 согласно показанному примеру включает в себя устройство 214 определения воздушной скорости. Кроме того, для определения или измерения бокового ветра, лазерный дальномерный блок включает в себя устройство 216 определения бокового ветра. Устройство 214 определения воздушной скорости и устройство 216 определения бокового ветра анализируют вектор скорости воздушного потока, выдаваемый устройством 212 определения скорости воздушного потока. Например, устройство 214 определения воздушной скорости определяет или рассчитывает воздушную скорость летательного аппарата 100 исходя из вектора скорости воздушного потока, выдаваемого устройством 212 определения скорости воздушного потока и параллельного относительно продольных осей 120 двигателей 110 и/или 112. В некоторых примерах устройство 214 определения воздушной скорости рассчитывает или измеряет воздушную скорость на основании угла разделения лазерных лучей 150 датчиков 132 (например, угла каждого из лазерных лучей 150 относительно передатчиков датчиков 132 и/или фюзеляжа 108). Например, устройство 212 определения скорости воздушного потока определяет воздушную скорость с учетом путевой скорости и характеристик ветра (например, попутного ветра, встречного ветра, восходящих потоков, нисходящих потоков и т.д.), когда летательный аппарат 100 движется относительно земли.
[0034] Схожим образом, устройство 216 определения бокового ветра определяет или рассчитывает величину бокового ветра (бокового ветра, который перпендикулярен продольным осям 120 двигателей 110 и 112) исходя из вектора скорости воздушного потока, выдаваемого устройством 212 определения скорости воздушного потока. Например, когда устройство 212 определения скорости воздушного потока измеряет скорость воздушного потока, когда летательный аппарат 100 неподвижен, при этом скорость воздушного потока равна скорости ветра. В некоторых примерах устройство 134 управления плавным увеличением тяги определяет (например, с использованием датчика путевой скорости на шасси летательного аппарата 100), что летательный аппарат 100 выполняет выруливание или неподвижен. В некоторых примерах устройство 216 определения бокового ветра, на основании углов датчиков 132 и/или лазерных лучей 150, определяет перпендикулярную составляющую вектора измеренной скорости воздушного потока (например, измеренного, когда летательный аппарат 100 неподвижен) для определения скорости бокового ветра. Устройство 214 определения воздушной скорости и устройство 216 определения бокового ветра сообщают воздушную скорость и скорость бокового ветра в блок 204 управления плавным увеличением тяги.
[0035] Блок 204 управления плавным увеличением тяги принимает воздушную скорость и/или скорость бокового ветра от лазерного дальномерного блока 202. На основании этой принятой информации блок 204 управления плавным увеличением тяги определяет, нужно ли приводить в действие плавное увеличение тяги (например, ограничивать ли значения выходной тяги) или отключить плавное увеличение тяги (например, удалить ограничения выходной тяги). Например, блок 204 управления плавным увеличением тяги определяет, нужно ли приводить в действие плавное увеличение тяги, когда летательный аппарат 100 выполняет выруливание и перед взлетом (например, когда путевая скорость летательного аппарата 100 равна нулю). Если блок 204 управления плавным увеличением тяги задействует плавное увеличение тяги, блок 204 управления плавным увеличением тяги согласно показанному примеру сообщает величину ограничения выходной тяги в электронные устройства 116 управления двигателями. Электронные устройства 116 управления двигателями не допускают, чтобы двигатели 110 и 112 выходили за пределы ограничения выходной тяги, определенного блоком 204 управления плавным увеличением тяги. В таких примерах электронное устройство 116 управления двигателем уменьшает командный сигнал на управление тягой, вводимый рычагом 114 управления тягой, который выходит за пределы ограничения выходной тяги. Например, электронные устройства 116 управления двигателями устанавливают выходную тягу двигателей 110 и 112 на величину ограничения выходной тяги, выдаваемую блоком 204 управления плавным увеличением тяги, когда сигнал управления тягой, вводимый рычагом 114 управления тягой, больше, чем величина ограничения выходной тяги, выдаваемая блоком 204 управления плавным увеличением тяги.
[0036] Если блок 204 управления плавным увеличением тяги определяет, что плавное увеличение тяги не требуется, блок 204 управления плавным увеличением тяги отключает плавное увеличение тяги. Когда плавное увеличение тяги отключено, блоком 204 управления плавным увеличением тяги на выходную тягу двигателей 110 и 112 не наложены ограничения. В таких примерах электронные устройства 116 управления двигателями управляют выходной тягой двигателей 110 и 112 на основании сигналов управления тягой, вводимых рычагом 114 управления тягой, и/или рабочего параметра (рабочих параметров).
[0037] Для определения необходимости задействования плавного увеличения тяги приведенный в качестве примера блок 204 управления плавным увеличением тяги включает в себя устройство 218 определения ограничения тяги, которое принимает измеренную скорость бокового ветра, выдаваемую устройством 216 определения бокового ветра. Для определения необходимости плавного увеличения тяги устройство 218 определения ограничения тяги сравнивает, посредством компаратора 220, измеренную скорость бокового ветра с диапазоном пороговых значений бокового ветра. Диапазон пороговых значений бокового ветра может быть сохранен в хранилище 206 данных (например, посредством таблицы поиска). Диапазон пороговых значений бокового ветра может быть изменен на основании рабочей характеристики (рабочих характеристик) двигателя летательного аппарата. Например, аэродинамические характеристики входного отверстия гондолы двигателя летательного аппарата могут быть выполнены с возможностью предотвращения разделения потока при больших скоростях бокового ветра, чем аэродинамические характеристики входного отверстия другой гондолы. В некоторых таких примерах двигатель может иметь первый диапазон пороговых значений бокового ветра, который может отличаться от диапазона пороговых значений бокового ветра второго двигателя, отличного от первого двигателя. Таким образом, диапазон пороговых значений бокового ветра может отличаться для различных типов двигателей летательных аппаратов. Например, диапазон пороговых значений бокового ветра может быть обеспечен заданной таблицей поиска, определенной в лаборатории во время испытаний конкретного двигателя.
[0038] На основании сравнения скорости бокового ветра с диапазоном пороговых значений бокового ветра, устройство 218 определения ограничения тяги определяет необходимость плавного увеличения тяги и/или полного плавного увеличения тяги или частичного плавного увеличение тяги. В показанном примере устройство 218 определения ограничения тяги приводит в действие частичное плавное увеличение тяги, когда измеренная скорость бокового ветра находится в пределах диапазона пороговых значений бокового ветра, и приводит в действие полное плавное увеличение тяги, когда измеренная скорость бокового ветра больше, чем верхний предел диапазона пороговых значений бокового ветра. В целом, режим полного плавного увеличения тяги может плавно увеличивать разгон двигателей 110 и 112 до получения полной выходной тяги с меньшей скоростью по сравнению с режимом частичного плавного увеличения тяги.
[0039] Кроме того, когда частичное плавное увеличение тяги приведено в действие, устройство 218 определения ограничения тяги согласно показанному примеру выбирает режим плавного увеличения тяги, соответствующий измеренной скорости бокового ветра, выдаваемой устройством 216 определения бокового ветра. Например, хранилище 206 данных может хранить множество режимов плавного увеличения тяги, соответствующих множеству параметров бокового ветра. Таким образом, приведенный в качестве примера блок 204 управления плавным увеличением тяги согласно показанному примеру применяет или задействует отличающееся плавное увеличение тяги и/или отличающиеся ограничения выходной тяги для отличающихся скоростей бокового ветра, которые находятся в пределах диапазона пороговых значений бокового ветра. Например, первый режим частичного плавного увеличения тяги может разрешать разгон двигателя с большей скоростью, когда скорость бокового ветра ближе к нижнему пределу диапазона пороговых значений бокового ветра по сравнению со скоростью бокового ветра, которая ближе к верхнему пределу диапазона пороговых значений бокового ветра. Иными словами, частичное плавное увеличение тяги согласно показанному примеру обеспечивает режим плавного увеличения тяги с плавным масштабированием в зависимости от измеренных параметров бокового ветра, определенных устройством 216 определения бокового ветра. Таким образом, для относительно небольших скоростей бокового ветра в диапазоне пороговых значений бокового ветра, блок 204 управления плавным увеличением тяги согласно показанному примеру задействует плавное увеличение тяги в течение этапа взлета меньшей продолжительности (например, требуется более короткая взлетно-посадочная полоса) по сравнению с плавным увеличением тяги, задействуемым для относительно больших скоростей бокового ветра в диапазоне пороговых значений бокового ветра. В некоторых примерах указанное множество режимов плавного увеличения тяги могут быть определены на основании рабочих характеристик двигателя и различаться для разных двигателей.
[0040] Когда приведено в действие полное или частичное плавное увеличение тяги, блок 204 управления плавным увеличением тяги согласно показанному примеру плавно увеличивает допустимую выходную тягу (например, ограничивает скорость разгона) двигателей 110 и 112 как функцию воздушной скорости летательного аппарата 100. Скорость, с которой блок 204 управления плавным увеличением тяги уменьшает ограничение тяги двигателей 110 и 112 как функцию воздушной скорости, может быть определена исходя из выбранного режима плавного увеличения тяги, извлеченного из хранилища 206 данных (например, посредством таблицы поиска).
[0041] Выбранный режим плавного увеличения тяги на основании скорости бокового ветра может включать в себя корректировки (например, уменьшение) ограничений выходной тяги по мере увеличения воздушной скорости. Например, блок 204 управления плавным увеличением тяги согласно показанному примеру последовательно уменьшает ограничение мощности двигателя (например, ограничение тяги) от начального ограничения тяги, задействованного, когда воздушная скорость равна нулю, до достижения полной имеющейся тяги (например, нулевое ограничение тяги), когда воздушная скорость является такой, что больше не возникает неблагоприятного воздействия на аэродинамику на входном отверстии 122 первого двигателя 110 и второго двигателя 112 вследствие бокового ветра. Иными словами, блок 204 управления плавным увеличением тяги согласно показанному примеру последовательно корректирует (например, уменьшает) ограничение выходной тяги на основании воздушной скорости летательного аппарата 100, когда летательный аппарат 100 перемещается от положения выруливания (например, неподвижного положения с нулевой путевой скоростью) до отрыва от земли (например, когда скорость взлета является достаточной для отрыва от земли). Скорость уменьшения тяги как функция воздушной скорости может быть линейной, экспоненциальной, непрерывной, постепенной, ступенчатой функцией и/или может иметь любую другую зависимость от воздушной скорости. Кроме того, скорость уменьшения тяги как функция воздушной скорости может изменяться в зависимости от выбранного режима плавного увеличения тяги. Например, скорость уменьшения тяги может быть больше для режимов плавного увеличения тяги, связанных со скоростями бокового ветра, которые ближе к нижнему пределу диапазона пороговых значений бокового ветра по сравнению со скоростью уменьшения тяги режимов плавного увеличения тяги, связанных со скоростями бокового ветра, которые ближе к верхнему пределу диапазона пороговых значений бокового ветра.
[0042] В некоторых примерах устройство 218 определения ограничения тяги согласно показанному примеру сравнивает опорный входной сигнал бокового ветра, выдаваемый посредством интерфейса 138 ввода/вывода данных, и скорость бокового ветра, выдаваемую устройством 216 определения бокового ветра. Блок 204 управления плавным увеличением тяги подает команду на контроллер 208 предупредительных сигналов для инициирования предупредительного сигнала в кабине 115, когда опорный входной сигнал бокового ветра меньше, чем измеренная скорость бокового ветра, выдаваемая устройством 216 определения бокового ветра. В некоторых примерах предупреждение, инициированное контроллером 208 предупредительных сигналов, предупреждает пилота о необходимости произвести переоценку полезной нагрузки летательного аппарата 100.
[0043] Приведенная в качестве примера система 102 плавного увеличения тяги и/или устройство 134 управления плавным увеличением тяги согласно показанному примеру обеспечивают для летательных аппаратов возможность иметь большую полезную нагрузку, когда параметры бокового ветра не требуют плавного увеличения тяги. Например, максимальную полезную нагрузку летательного аппарата 100 определяют на основании оптимизации взлета, которая включает в себя учет опорной величины бокового ветра, длины взлетно-посадочной полосы, давления воздуха, температуры воздуха, высоты и т.д. Например, перед загрузкой летательного аппарата командно-диспетчерский пункт выдает опорную величину бокового ветра пилоту, который вводит ее посредством интерфейса 138 ввода/вывода данных. На основании опорной боковой скорости и других параметров, отмеченных выше, пилот определяет максимальную нагрузку для оптимизации взлета на основании нормы безопасности авиакомпании и/или государственных органов. В некоторых примерах, если опорная величина бокового ветра меньше, чем нижний предел диапазона пороговых значений бокового ветра, связанных с летательным аппаратом 100, летательный аппарат 100 согласно показанному примеру может быть загружен без учета ограничений по длине взлетно-посадочной полосы, связанных с известными системами плавного увеличения тяги. Однако другие летательные аппараты, реализованные с помощью известных систем плавного увеличения тяги, требуют задействования фактора плавного увеличения тяги при выполнении оптимизации взлета, что уменьшает максимально допустимую полезную нагрузку летательного аппарата. Кроме того, приведенная в качестве примера система 102 плавного увеличения тяги и/или устройство 134 управления плавным увеличением тяги согласно показанному примеру оптимизируют взлетные показатели за счет приведения в действие частичного плавного увеличения тяги во время бокового ветра с определенными параметрами. Таким образом, для летательного аппарата 100 могут быть обеспечены меньшие ограничения по весу и длине взлетно-посадочной высоты.
[0044] Хотя на ФИГ. 2 показан пример реализации приведенного в качестве примера устройства 134 управления плавным увеличением тяги по ФИГ. 1, один или более элементов, процессов и/или устройств, показанных на ФИГ. 2, могут быть скомбинированы, разделены, перегруппированы, не использованы, удалены и/или реализованы любым другим способом. Кроме того, приведенные в качестве примеров устройства: лазерный дальномерный блок 210, блок 204 управления плавным увеличением тяги, хранилище 206 данных, контроллер 208 предупредительных сигналов, сигнальный процессор 210, устройство 212 определения скорости воздушного потока, устройство 214 определения воздушной скорости, устройство 216 определения бокового ветра, устройство 218 определения ограничения тяги, компаратор 220 и/или, в целом, устройство 134 управления плавным увеличением тяги по ФИГ. 2, - могут быть реализованы с помощью аппаратных средств, программного обеспечения, прошивки и/или любой комбинации аппаратных средств, программного обеспечения и/или прошивки. Так, например, любые из следующих приведенных в качестве примеров устройств: лазерный дальномерный блок 210, приведенный в качестве примера блок 204 управления плавным увеличением тяги, приведенное в качестве примера хранилище 206 данных, приведенный в качестве примера контроллер 208 предупредительных сигналов, приведенный в качестве примера сигнальный процессор 210, приведенное в качестве примера устройство 212 определения скорости воздушного потока, приведенное в качестве примера устройство 214 определения воздушной скорости, приведенное в качестве примера устройство 216 определения бокового ветра, приведенное в качестве примера устройство 218 определения ограничения тяги, компаратор 220 и/или, в целом, устройство 134 управления плавным увеличением тяги по ФИГ. 2, - могут быть реализованы посредством одной или более аналоговых или цифровых схем, логических схем, программируемого процессора (программируемых процессоров), специализированной интегральной схемы (специализированных интегральных схем) (application specific integrated circuit, ASIC), программируемого логического устройства (программируемых логических устройств) (programmable logic device, PLD) и/или программируемой логической интегральной схемы (программируемых логических интегральных схем) (field programmable logic device, FPLD). При рассмотрении пунктов формулы настоящего патента, относящихся к любым устройствам или системам с охватом реализации программного обеспечения и/или прошивок, в настоящем документе ясно выражается, что по меньшей мере одно из приведенных в качестве примеров устройств: лазерный дальномерный блок 210, блок 204 управления плавным увеличением тяги, хранилище 206 данных, контроллер 208 предупредительных сигналов, сигнальный процессор 210, устройство 212 определения скорости воздушного потока, устройство 214 определения воздушной скорости, устройство 216 определения бокового ветра, устройство 218 определения ограничения тяги, компаратор 220, - включает в себя материальное компьютерочитаемое устройство для хранения или диск для хранения, такие как запоминающее устройство, цифровой универсальный диск (DVD), компакт-диск (CD), Blu-Ray диск и т.д., хранящие указанные программное обеспечение и/или прошивки. Кроме того, приведенное в качестве примера устройство 134 управления плавным увеличением тяги по ФИГ. 1 может включать в себя один или более элементов, процессов и/или устройств в дополнение или вместо показанных на ФИГ. 2 и/или может включать в себя более одного из любых или всех показанных элементов, процессов и устройств.
[0045] На ФИГ. 3А и 3В показана структурная схема приведенного в качестве примера способа 300 реализации устройства 134 управления плавным увеличением тяги по ФИГ. 1 и 2. В этом примере способ может быть реализован с использованием машиночитаемых инструкций, которые содержат программу для исполнения процессором, таким как процессор 512, показанный в приведенной в качестве примера процессорной платформе 500, раскрытой ниже в связи с ФИГ. 5. Программа может быть реализована в программном обеспечении, сохраненном на материальном компьютерочитаемом носителе данных, таком как диск CD-ROM, гибкий диск, жесткий диск, цифровой универсальный диск (DVD), Blu-Ray диск или запоминающее устройство, связанное с процессором 512, при этом вся программа и/или ее части в альтернативных вариантах реализации могут быть исполнены устройством, отличным от процессора 512, и/или реализованы в прошивке или специальных аппаратных средствах. Кроме того, хотя приведенная в качестве примера программа описана ниже со ссылкой на структурные схемы, проиллюстрированные на ФИГ. 3А и 3В, в альтернативных вариантах реализации могут быть использованы многие другие способы реализации приведенного в качестве примера устройства 134 управления плавным увеличением тяги. Например, порядок выполнения блоков может быть изменен и/или некоторые из описанных блоков могут быть изменены, удалены или скомбинированы.
[0046] Как уже упоминалось выше, приведенные в качестве примеров способы по ФИГ. 3А и 3В могут быть реализованы с использованием кодированных инструкций (например, компьютеро- и/или машиночитаемых инструкций), сохраненных на материальном компьютерочитаемом носителе данных, таком как дисковод жесткого диска, флэш-память, постоянное запоминающее устройство (ROM), компакт-диск (CD), цифровой универсальный диск (DVD), кэш-память, оперативное запоминающее устройство (RAM) и/или любое другое устройство для хранения или диск для хранения, в котором информация хранится в течение времени любой продолжительности (например, в течение длительных периодов времени, постоянно, в течение кратких периодов времени, для временной буферизации и/или для кэширования информации). При использовании в настоящем документе термин "материальный компьютерочитаемый носитель данных" явным образом означает, что он включает в себя любой тип компьютерочитаемого устройства для хранения и/или диска для хранения и исключает распространяемые сигналы, а также исключает средства передачи. При использовании в настоящем документе выражения "материальный компьютерочитаемый носитель данных" и "материальный машиночитаемый носитель данных" используются как взаимозаменяемые. В дополнительном или альтернативном варианте реализации приведенные в качестве примеров способы по ФИГ. 3А и 3В могут быть реализованы с использованием кодированных инструкций (например, компьютеро- и/или машиночитаемых инструкций), сохраненных на имеющем некратковременную природу компьютере и/или машиночитаемом носителе, таком как дисковод жесткого диска, флэш-память, постоянное запоминающее устройство, компакт-диск, цифровой универсальный диск, кэш-память, оперативное запоминающее устройство и/или любое другое устройство для хранения или диск для хранения, в котором информация хранится в течение времени любой продолжительности (например, в течение длительных периодов времени, постоянно, в течение кратких периодов времени, для временной буферизации и/или для кэширования информации). При использовании в настоящем документе термин "некратковременный компьютерочитаемый носитель" явным образом означает, что он включает любой тип компьютерочитаемого устройства для хранения и/или диска для хранения и исключает распространяемые сигналы, а также исключает средства передачи. При использовании в настоящем документе, когда выражение "по меньшей мере" используется в качестве переходного термина в ограничительной части пункта формулы изобретения, оно является открытым в том смысле, в котором является открытым термин "содержащий".
[0047] Способ 300 по ФИГ. 3А и 3В начинают в блоке 302, когда блок 204 управления плавным увеличением тяги принимает опорное значение скорости бокового ветра (блок 302). Например, блок 204 управления плавным увеличением тяги согласно показанному примеру принимает опорное значение скорости бокового ветра от находящегося в кабине 115 интерфейса 138 ввода/вывода данных. В некоторых примерах пилот принимает опорное значение скорости бокового ветра (например, 15 узлов (27,8 км/ч)) от командно-диспетчерского пункта. Блок 204 управления плавным увеличением тяги может хранить опорную скорость бокового ветра в хранилище 206 данных. Пилот может выполнить загрузку летательного аппарата 100 на основании длины взлетно-посадочной полосы и доступности тяги двигателя, используя опорное значение скорости бокового ветра, выдаваемое командно-диспетчерским пунктом. В некоторых примерах пилот может добавить буферную величину бокового ветра (например, величиной 5 узлов (9,3 км/ч)) к опорному значению скорости бокового ветра.
[0048] Устройство 134 управления плавным увеличением тяги измеряет скорость бокового ветра (блок 304). Например, система 102 плавного увеличения тяги согласно показанному примеру измеряет скорость бокового ветра, когда летательный аппарат 100 выполняет выруливание (например, неподвижен). Устройство 216 определения бокового ветра измеряет скорость бокового ветра на основании вектора скорости воздушного потока, выдаваемого устройством 212 определения скорости воздушного потока, и сообщает измеренное значение скорости бокового ветра в блок 204 управления плавным увеличением тяги.
[0049] Затем блок 204 управления плавным увеличением тяги сравнивает опорную скорость бокового ветра и измеренную скорость бокового ветра (блок 306). После этого блок 204 управления плавным увеличением тяги определяет, меньше ли опорная скорость бокового ветра измеренной скорости бокового ветра (блок 308). Если при реализации блока 308 опорная скорость бокового ветра меньше, чем измеренная скорость бокового ветра, блок 204 управления плавным увеличением тяги вынуждает контроллер 208 предупредительных сигналов инициировать предупредительный сигнал возврата к выходу на посадку (блок 310). Например, контроллер 208 предупредительных сигналов может инициировать предупредительный сигнал в кабине 115 посредством интерфейса 138 ввода/вывода данных (например, звуковой сигнал, визуальный индикатор и т.д.). Например, во время выруливания, если система 102 плавного увеличения тяги измеряет скорость бокового ветра, как имеющего величину 18 узлов (33,3 км/ч), что больше, чем опорная скорость бокового ветра, величиной 15 узлов (27,8 км/ч), пилот получает уведомление о необходимости возврата к выходу на посадку для уменьшения полезной нагрузки.
[0050] Если при реализации блока 308 опорная скорость бокового ветра меньше, чем измеренная скорость бокового ветра, устройство 218 определения ограничения тяги сравнивает измеренную скорость бокового ветра с диапазоном пороговых значений бокового ветра (блок 312). Например, устройство 218 определения ограничения тяги может определять/извлекать диапазон пороговых значений бокового ветра из хранилища 206 данных. Например, диапазон пороговых значений бокового ветра может находиться между приблизительно 12 узлами (22,2 км/ч) (например, нижний предел) и 25 узлами (46,3 км/ч) (например, верхний предел).
[0051] Устройство 218 определения ограничения тяги определяет, превышает ли измеренная скорость бокового ветра нижний предел диапазона пороговых значений бокового ветра (блок 314). Если при реализации блока 414 устройство 218 определения ограничения тяги определяет, что измеренная скорость бокового ветра не превышает нижний предел диапазона пороговых значений бокового ветра, устройство 218 определения ограничения тяги отключает плавное увеличение тяги (блок 316). Например, если измеренная скорость бокового ветра составляет менее 12 узлов (22,2 км/ч), блок 204 управления плавным увеличением тяги отключает плавное увеличение тяги.
[0052] Если при реализации блока 414 устройство 218 определения ограничения тяги определяет, что измеренная скорость бокового ветра превышает нижний предел диапазона пороговых значений бокового ветра, устройство 218 определения ограничения тяги приводит в действие плавное увеличение тяги (блок 318). Когда плавное увеличение тяги приведено в действие, устройство 218 определения ограничения тяги определяет, превышает ли измеренная скорость бокового ветра верхний предел диапазона пороговых значений бокового ветра (блок 320). Если при реализации блока 320 скорость бокового ветра превышает верхний предел диапазона пороговых значений бокового ветра, блок 204 управления плавным увеличением тяги выбирает или приводит в действие режим полного плавного увеличения тяги (блок 322). Если при реализации блока 320 скорость бокового ветра не превышает верхний предел диапазона пороговых значений бокового ветра, блок 204 управления плавным увеличением тяги выбирает или приводит в действие режим частичного плавного увеличения тяги (блок 324). Например, блок 204 управления плавным увеличением тяги выбирает режим частичного плавного увеличения тяги, связанный с измеренной скоростью бокового ветра.
[0053] Затем устройство 214 определения воздушной скорости измеряет воздушную скорость летательного аппарата 100 (блок 326). Например, устройство 214 определения воздушной скорости сообщает значение воздушной скорости в блок 204 управления плавным увеличением тяги. Устройство 218 определения ограничения тяги определяет, требует ли выбранный режим плавного увеличения тяги ограничения выходной тяги при измеренной воздушной скорости (блок 328). Если при реализации блока 328 устройство 218 определения ограничения тяги определяет, что выбранный режим плавного увеличения тяги не требует ограничения выходной тяги, связанного с измеренной воздушной скоростью, блок 204 управления плавным увеличением тяги отключает выбранный режим плавного увеличения тяги, и выполнение способа завершают. В некоторых таких примерах, когда плавное увеличение тяги отключено, электронное устройство 116 управления двигателем задает выходную тягу первого двигателя 110 и второго двигателя 112 в виде командного сигнала на управление тягой от рычага 114 управления тягой.
[0054] Если при реализации блока 328 устройство 218 определения ограничения тяги определяет, что выбранный режим плавного увеличения тяги требует ограничения выходной тяги, устройство 218 определения ограничения тяги определяет ограничение выходной тяги, которое соответствует измеренной воздушной скорости исходя из выбранного режима плавного увеличения тяги (блок 330). Например, устройство 218 определения ограничения тяги извлекает ограничение выходной тяги, соответствующее измеренной воздушной скорости, из таблицы поиска, связанной с выбранным режимом плавного увеличения тяги. Блок 204 управления плавным увеличением тяги задает ограничение выходной тяги как максимальное допустимое значение выходной тяги первого двигателя 110 и второго двигателя 112 (блок 332). Например, согласно способу 300, после этого возвращаются к блоку 326 и продолжают корректировку ограничения выходной тяги по мере изменения воздушной скорости (например, ее увеличения) на основании выбранного режима плавного увеличения тяги до тех пор, пока при реализации блока 328 измеренная воздушная скорость больше не будет требовать ограничения выходной тяги. Например, ограничение выходной тяги не требуется, когда измеренная воздушная скорость является такой, что боковой ветер больше не влияет на рабочие характеристики первого двигателя 110 и второго двигателя 112.
[0055] На ФИГ. 4 в качестве примера приведен график 400, на котором представлены примеры режимов плавного увеличения тяги, которые могут быть использованы для реализации приведенного в качестве примера устройства 134 управления плавным увеличением тяги по ФИГ. 1 и 2. Например, на графике 400 показаны первый режим 402 плавного увеличения тяги, связанный с первой скоростью бокового ветра (например, 15 узлов (27,8 км/ч)), второй режим 404 плавного увеличения тяги, связанный со второй скоростью бокового ветра (например, 20 узлов (37,0 км/ч)), третий режим 406 плавного увеличения тяги, связанный с третьей скоростью бокового ветра (например, 25 узлов (46,3 км/ч)), и четвертый режим 408 плавного увеличения тяги, связанный с четвертой скоростью бокового ветра (например, 30 узлов (55,6 км/ч)). Например, первый, второй и третий режимы 402-406 плавного увеличения тяги согласно показанному примеру обеспечивают частичное плавное увеличение тяги, а четвертый режим 408 плавного увеличения тяги согласно показанному примеру обеспечивает полное плавное увеличение тяги.
[0056] На графике 400 согласно показанному примеру приведена зависимость ограничения тяги от воздушной скорости для различных приведенных в качестве примера режимов 402-408 плавного увеличения тяги. В показанном примере, на оси у графика представлены значения 410 ограничения выходной тяги в процентах от полной доступной тяги, а на оси x представлена воздушная скорость 412 (например, направленный вперед вектор относительной скорости летательного аппарата 100). Таким образом, для каждого из режимов 402-408 плавного увеличения тяги ограничение 410 выходной тяги обеспечивается как функция воздушной скорости 412.
[0057] Во время работы, например, устройство 218 определения ограничения тяги согласно показанному примеру определяет ограничение 410 выходной тяги как функцию измеренной воздушной скорости 412 для одного выбранного режима из режимов 402-408 плавного увеличения тяги. Например, во время работы, когда скорость бокового ветра, измеренная системой 102 плавного увеличения тяги, составляет 15 узлов (27,8 км/ч), когда летательный аппарат 100 неподвижен или выполняет выруливание, блок 204 управления плавным увеличением тяги выбирает или приводит в действие первый режим 402 плавного увеличения тяги (например, режим частичного плавного увеличения тяги). Устройство 218 определения ограничения тяги принимает воздушную скорость 412 от устройства 214 определения воздушной скорости и использует график 400 для определения ограничения 410 выходной тяги, связанного с выбранными режимами 402-408 плавного увеличения тяги на основании измеренной воздушной скорости 412. Таким образом, когда выбран первый режим 402 плавного увеличения тяги и измеренная воздушная скорость 412, полученная от устройства 214 определения воздушной скорости, составляет от 0 узлов (0 км/ч) до 15 узлов (27,8 км/ч), устройство 218 определения ограничения тяги определяет, что ограничение 410 выходной тяги составляет 80 процентов от тяги двигателя. По мере увеличения воздушной скорости 412 от 15 узлов (27,8 км/ч) до приблизительно 20 узлов (37,0 км/ч) устройство 218 определения ограничения тяги изменяет ограничение 410 выходной тяги от 80 процентов тяги двигателя до 100 процентов тяги двигателя. Таким образом, первый режим 402 плавного увеличения тяги согласно показанному примеру обеспечивает для первого двигателя 110 и второго двигателя 112 возможность достижения полной тяги, когда воздушная скорость 412 составляет приблизительно 20 узлов (37,0 км/ч).
[0058] И наоборот, второй режим 404 плавного увеличения тяги ограничивает выходную тягу до 65 процентов тяги двигателя, когда воздушная скорость 412 составляет от приблизительно 0 узлов (0 км/ч) до 15 узлов (27,8 км/ч), и позволяет первому двигателю ПО и второму двигателю 112 достичь тяги двигателя величиной 100 процентов, когда воздушная скорость 412 составляет приблизительно 45 узлов (83,3 км/ч). Таким образом, второй режим 404 плавного увеличения тяги обеспечивает более постепенное увеличение тяги до 100 процентов тяги двигателя, чем первый режим 402 плавного увеличения тяги. Приведенные в качестве примеров режимы 402-408 плавного увеличения тяги согласно показанному примеру могут быть сконфигурированы для различных типов двигателей летательных аппаратов и/или могут отличаться в зависимости от характеристик различных двигателей.
[0059] На ФИГ. 5 показана блок-схема приведенной в качестве примера процессорной платформы, выполненной с возможностью исполнения инструкций для реализации способа 300 по ФИГ. 3А и 3В и приведенного в качестве примера устройства 134 управления плавным увеличением тяги по ФИГ. 1 и 2. Процессорная платформа 500 может представлять собой, например, сервер, персональный компьютер, мобильное устройство (например, мобильный телефон, смартфон, планшет, такой как планшет iPad™), персональный цифровой помощник (personal digital assistant, (PDA), Интернет-устройство, DVD-плеер, проигрыватель компакт-дисков, цифровой видеомагнитофон, Blu-Ray плеер или вычислительное устройство любого другого типа.
[0060] Процессорная платформа 500 согласно показанному примеру включает в себя процессор 512. Процессор 512 согласно показанному примеру выполнен в виде аппаратных средств. Например, процессор 512 может быть реализован посредством одной или более интегральных схем, логических схем, микропроцессоров или контроллеров любого необходимого бренда или изготовителя.
[0061] Процессор 512 согласно показанному примеру включает в себя локальную память 513 (например, кэш-память). Процессор 512 согласно показанному примеру имеет связь с основной памятью, включая энергозависимую память 514 и энергонезависимую память 516, посредством шины 518. Энергозависимая память 514 может быть реализована посредством синхронного динамического ОЗУ (SDRAM), динамического ОЗУ (DRAM), динамической памяти с произвольным доступом от компании RAMBUS (RDRAM) и/или посредством любого другого типа запоминающего устройства с произвольным доступом. Энергонезависимая память 516 может быть реализована посредством флэш-памяти и/или устройства памяти любого другого необходимого типа. Доступ к основной памяти 514, 516 управляется контроллером памяти.
[0062] Процессорная платформа 500 согласно показанному примеру также включает в себя интерфейсную схему 520. Интерфейсная схема 520 может быть реализована посредством стандартного интерфейса любого типа, такого как Ethernet интерфейс, универсальная последовательная шина (USB) и/или экспресс-интерфейс PCI.
[0063] В показанном примере одно или более устройств 522 ввода соединены с интерфейсной схемой 520. Устройство (устройства) 522 ввода позволяет (позволяют) пользователю вводить данные и команды в процессор 512. Устройство (устройства) ввода может быть реализовано, например, посредством аудиодатчика, микрофона, камеры (камеры покадровой съемки или видео), клавиатуры, кнопки, мыши, сенсорного экрана, сенсорной площадки, шарового манипулятора, манипулятора типа isopoint и/или системы распознавания голоса.
[0064] Одно или более устройств 524 вывода также соединены с интерфейсной схемой 520 согласно показанному примеру. Устройства 524 вывода могут быть реализованы, например, посредством устройств отображения (например, светоизлучающего диода (LED), органического светоизлучающего диода (OLED), жидкокристаллического дисплея, дисплея с электронно-лучевой трубкой (CRT), сенсорного экрана, тактильного устройство вывода, принтера и/или динамиков). Интерфейсная схема 520 согласно показанному примеру, таким образом, обычно включает в себя карту с графическим драйвером, чип с графическим драйвером или процессор с графическим драйвером.
[0065] Интерфейсная схема 520 согласно показанному примеру также включает в себя устройство связи, такое как передатчик, приемник, приемопередатчик, модем и/или сетевую интерфейсную плату для обеспечения обмена данными с внешними машинами (например, вычислительными устройствами любого типа) через сеть 526 (например, соединение Ethernet, цифровую абонентскую линию (digital subscriber line, DSL), телефонную линию, коаксиальный кабель, систему сотовой телефонии и т.д.).
[0066] Процессорная платформа 500 согласно показанному примеру также включает в себя одно или более запоминающих устройств 528 большой емкости для хранения программного обеспечения и/или данных. Примеры таких запоминающих устройств 528 большой емкости включают дисководы гибких дисков, накопители на жестких магнитных дисках, приводы компакт-дисков, приводы компакт-дисков формата Blu-Ray, системы типа RAID на основе независимых дисковых накопителей с избыточностью и приводы компакт-дисков формата DVD.
[0067] Кодированные инструкции 532 для реализации способов по ФИГ. 3А и 3В могут быть сохранены в устройстве 528 для хранения большой емкости, в энергозависимой памяти 514, в энергонезависимой памяти 516 и/или на съемном материальном компьютерочитаемом носителе данных, таком как компакт-диск или диск DVD.
Кроме того, раскрытие настоящего изобретения содержит примеры согласно следующим пунктам:
Пункт 1. Система управления тягой для использования с летательным аппаратом, содержащая:
датчик для измерения скорости бокового ветра и
блок управления плавным увеличением тяги для сравнения измеренной скорости бокового ветра с диапазоном пороговых значений бокового ветра и для приведения в действие режима частичного плавного увеличения тяги во время взлета, когда измеренная скорость бокового ветра находится в пределах диапазона пороговых значений бокового ветра,
при этом режим частичного плавного увеличения тяги выбран из множества режимов плавного увеличения тяги.
Пункт 2. Система по пункту 1, в которой блок (204) управления плавным увеличением тяги выполнен с возможностью приема опорной скорости бокового ветра.
Пункт 3. Система по пункту 2, в которой блок управления плавным увеличением тяги выполнен с возможностью сравнения опорной скорости бокового ветра и измеренной скорости бокового ветра.
Пункт 4. Система по пункту 3, также содержащая контроллер предупредительных сигналов для инициирования предупредительного сигнала, когда опорная скорость бокового ветра меньше, чем измеренная скорость бокового ветра.
Пункт 5. Система по пункту 1, в которой указанное устройство управления тягой выполнено с возможностью приведения в действие режима полного плавного увеличения тяги во время взлета, когда измеренная скорость бокового ветра больше, чем верхний предел диапазона пороговых значений бокового ветра.
Пункт 6. Система по пункту 5, в которой указанное устройство управления тягой выполнено с возможностью отключения плавного увеличения тяги, когда измеренная скорость бокового ветра меньше, чем нижний предел диапазона пороговых значений бокового ветра.
Пункт 7. Способ управления тягой летательного аппарата, включающий: измерение скорости бокового ветра при выруливании летательного аппарата; сравнение измеренной скорости бокового ветра с диапазоном пороговых значений бокового ветра и
приведение в действие режима частичного плавного увеличения тяги во время взлета на основе измеренной скорости бокового ветра, когда измеренная скорость бокового ветра находится в пределах диапазона пороговых значений бокового ветра.
Пункт 8. Способ по пункту 7, также включающий применение режима полного плавного увеличения тяги во время взлета, когда измеренная скорость бокового ветра больше, чем верхний предел диапазона пороговых значений бокового ветра.
Пункт 9. Способ по пункту 8, также включающий отключение плавного увеличения тяги во время взлета, когда измеренная скорость бокового ветра меньше, чем нижний предел диапазона пороговых значений бокового ветра.
Пункт 10. Способ по пункту 7, также включающий сравнение опорной скорости бокового ветра и измеренной скорости бокового ветра и инициирование предупредительного сигнала, когда опорная скорость бокового ветра меньше, чем измеренная скорость бокового ветра.
Пункт 11. Способ по пункту 7, согласно которому обеспечение режима частичного плавного увеличения тяги включает в себя извлечение режима частичного плавного увеличения тяги из таблицы поиска.
Пункт 12. Способ по пункту 7, также включающий измерение воздушной скорости летательного аппарата во время взлета и изменение ограничения выходной тяги как функции измеренной воздушной скорости.
Пункт 13. Способ по пункту 12, также включающий уменьшение ограничения выходной тяги по мере увеличения измеренной воздушной скорости.
Пункт 14. Материальный компьютерочитаемый носитель данных, содержащий инструкции, которые при своем исполнении побуждают машину:
измерять скорость бокового ветра;
сравнивать измеренную скорость бокового ветра с диапазоном пороговых значений бокового ветра и
приводить в действие режим частичного плавного увеличения тяги во время взлета на основе измеренной скорости бокового ветра, когда измеренная скорость бокового ветра находится в пределах диапазона пороговых значений бокового ветра.
Пункт 15. Компьютерочитаемый носитель данных по пункту 14, также содержащий инструкции, которые при своем исполнении побуждают машину применять режим полного плавного увеличения тяги во время взлета, когда измеренная скорость бокового ветра больше, чем верхний предел диапазона пороговых значений бокового ветра.
Пункт 16. Компьютерочитаемый носитель данных по пункту 15, также содержащий инструкции, которые при своем исполнении побуждают машину отключать плавное увеличение тяги во время взлета, когда измеренная скорость бокового ветра меньше, чем нижний предел диапазона пороговых значений бокового ветра.
Пункт 17. Компьютерочитаемый носитель данных по пункту 14, также содержащий инструкции, которые при своем исполнении побуждают машину сравнивать опорную скорость бокового ветра и измеренную скорость бокового ветра и инициировать предупредительный сигнал, когда опорная скорость бокового ветра меньше, чем измеренная скорость бокового ветра.
Пункт 18. Компьютерочитаемый носитель данных по пункту 14, также содержащий инструкции, которые при своем исполнении побуждают машину извлекать режим частичного плавного увеличения тяги, соответствующий измеренной скорости бокового ветра, из заданной таблицы поиска.
Пункт 19. Компьютерочитаемый носитель данных по пункту 14, также содержащий инструкции, которые при своем исполнении побуждают машину измерять воздушную скорость летательного аппарата во время взлета и изменять ограничение выходной тяги как функцию измеренной воздушной скорости.
Пункт 20. Компьютерочитаемый носитель данных по пункту 19, также содержащий инструкции, которые при своем исполнении побуждают машину уменьшать ограничение выходной тяги по мере увеличения измеренной воздушной скорости.
Хотя в настоящем документе раскрыты некоторые приведенные в качестве примеров способы, устройства и изделия, объем охвата данного патента ими не ограничен. Напротив, этот патент охватывает все способы, устройства и изделия, в достаточной степени охватываемые объемом формулы изобретения по данному патенту.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ ТЯГОЙ В ПОЛЁТЕ | 2017 |
|
RU2734364C2 |
| Способ управления перепуском воздуха из компрессора низкого давления турбореактивного двухвального двигателя с высокой степенью двухконтурности | 2024 |
|
RU2836207C1 |
| СИСТЕМА И СПОСОБ КОМПЕНСАЦИИ ПОРЫВА ВОЗДУШНОЙ МАССЫ ДЛЯ ВОЗДУШНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2706679C2 |
| СИСТЕМА АДАПТИВНОЙ ФИЛЬТРАЦИИ ДЛЯ АЭРОДИНАМИЧЕСКИХ УГЛОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2735751C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| Интеллектуальная система поддержки экипажа летательного аппарата | 2024 |
|
RU2839176C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С ГИБРИДНОЙ СИЛОВОЙ УСТАНОВКОЙ | 2017 |
|
RU2724940C2 |
| МУЛЬТИКОПТЕР С ВОЗДУШНЫМИ ВИНТАМИ РАЗЛИЧНОГО НАЗНАЧЕНИЯ | 2016 |
|
RU2718460C1 |
| УСТРОЙСТВО ПРОГНОЗИРОВАНИЯ И ВИЗУАЛИЗАЦИИ ВИХРЕЙ В СПУТНОМ СЛЕДЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2463638C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
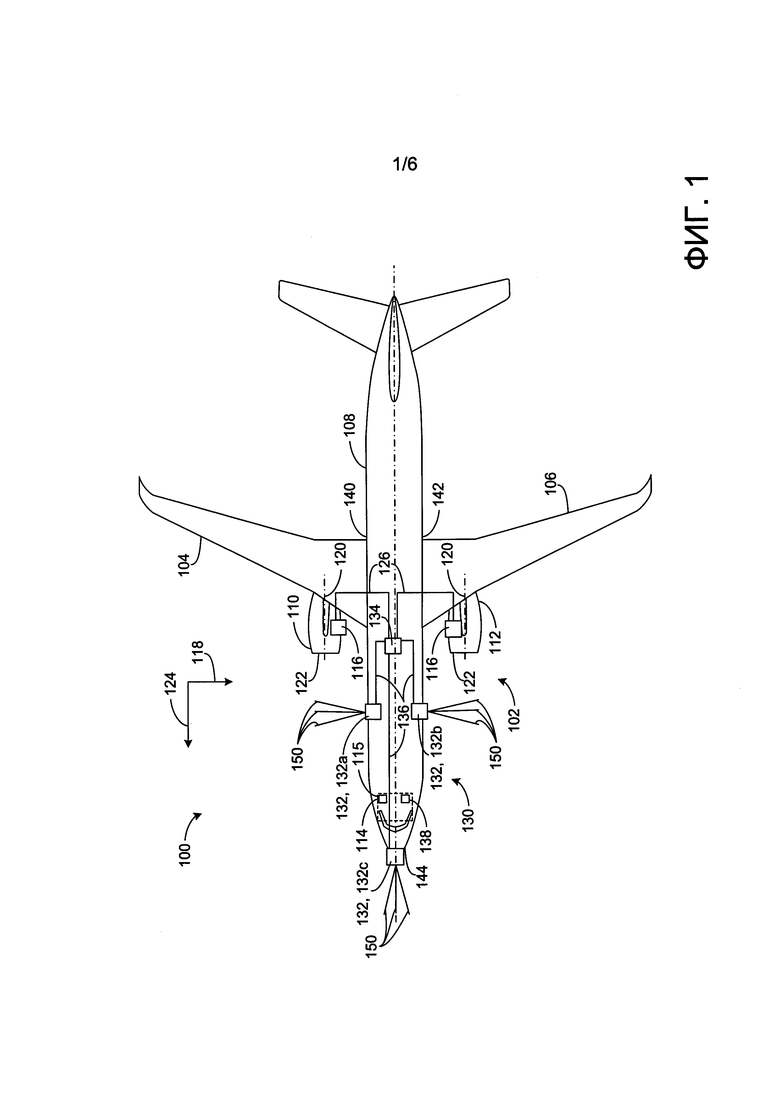
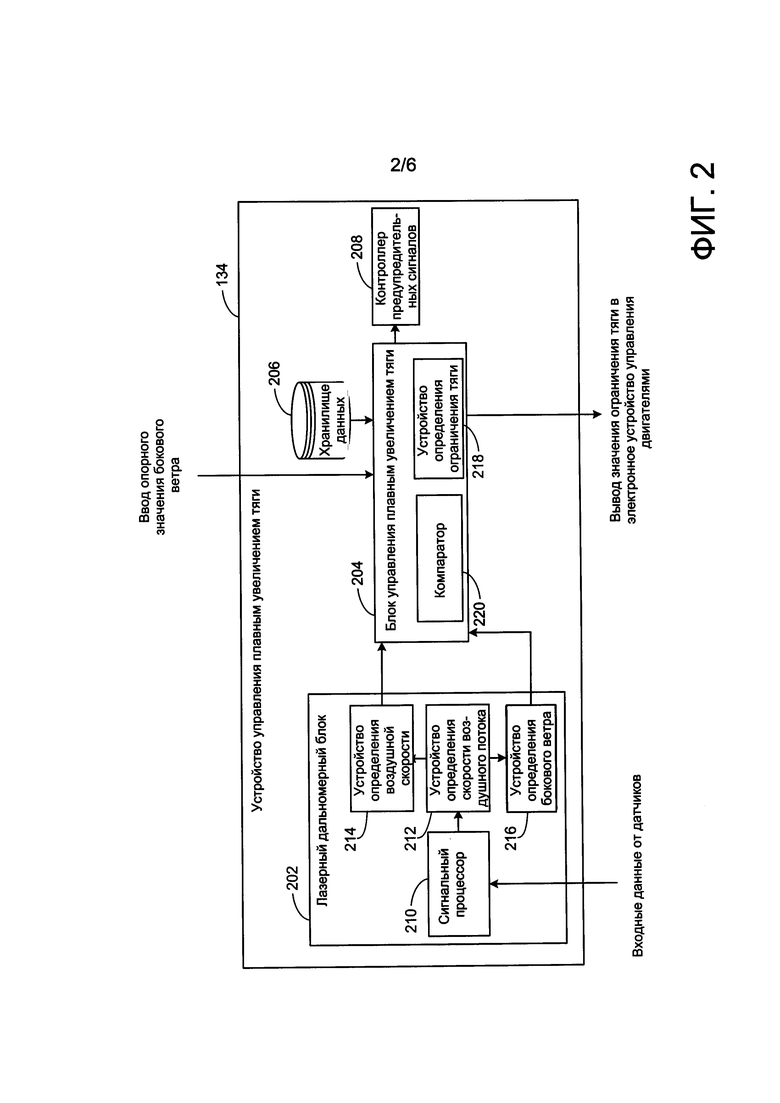
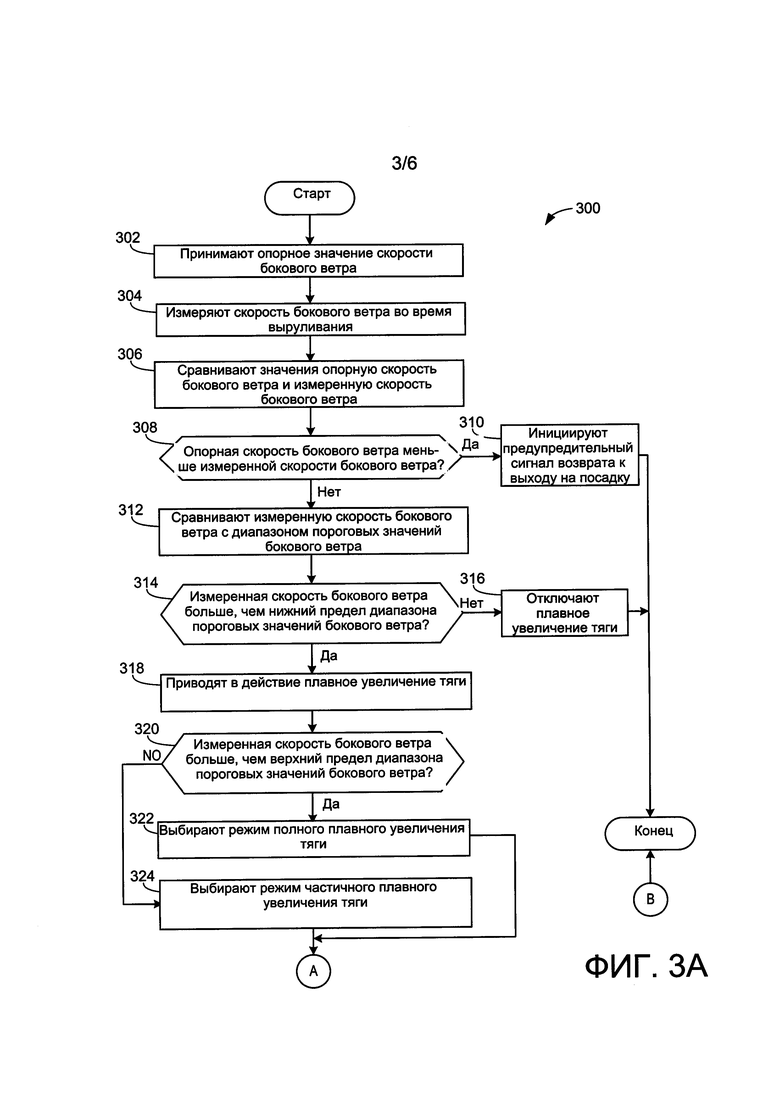
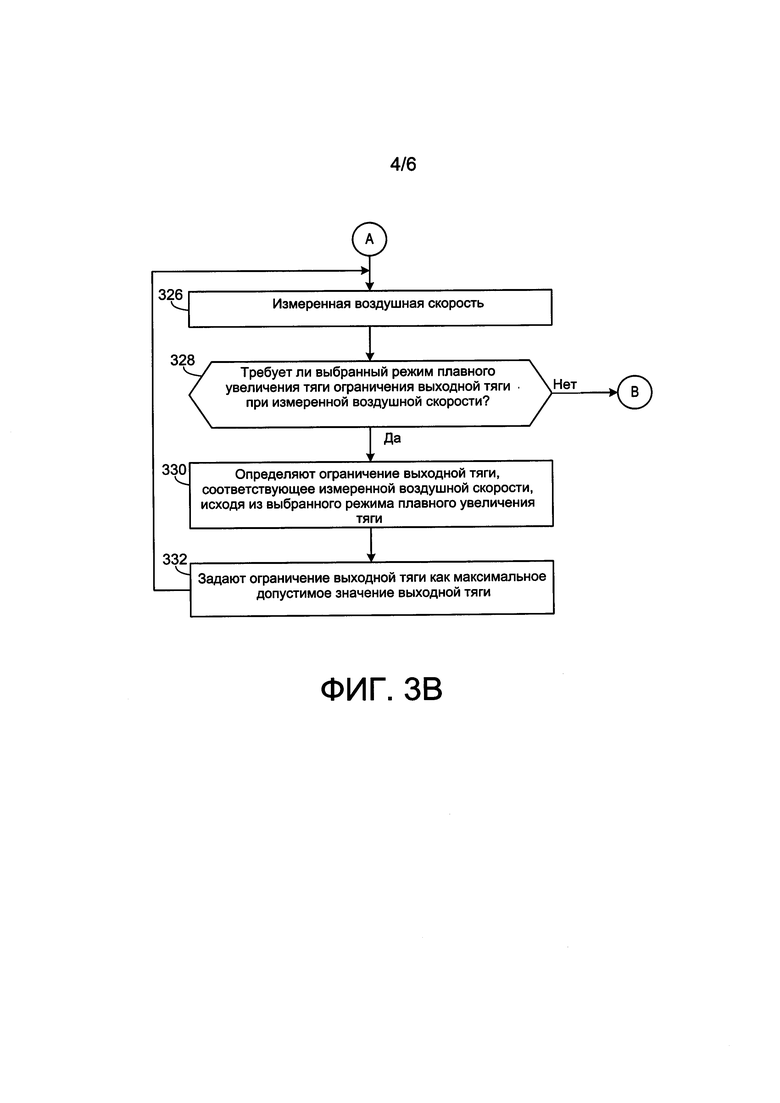
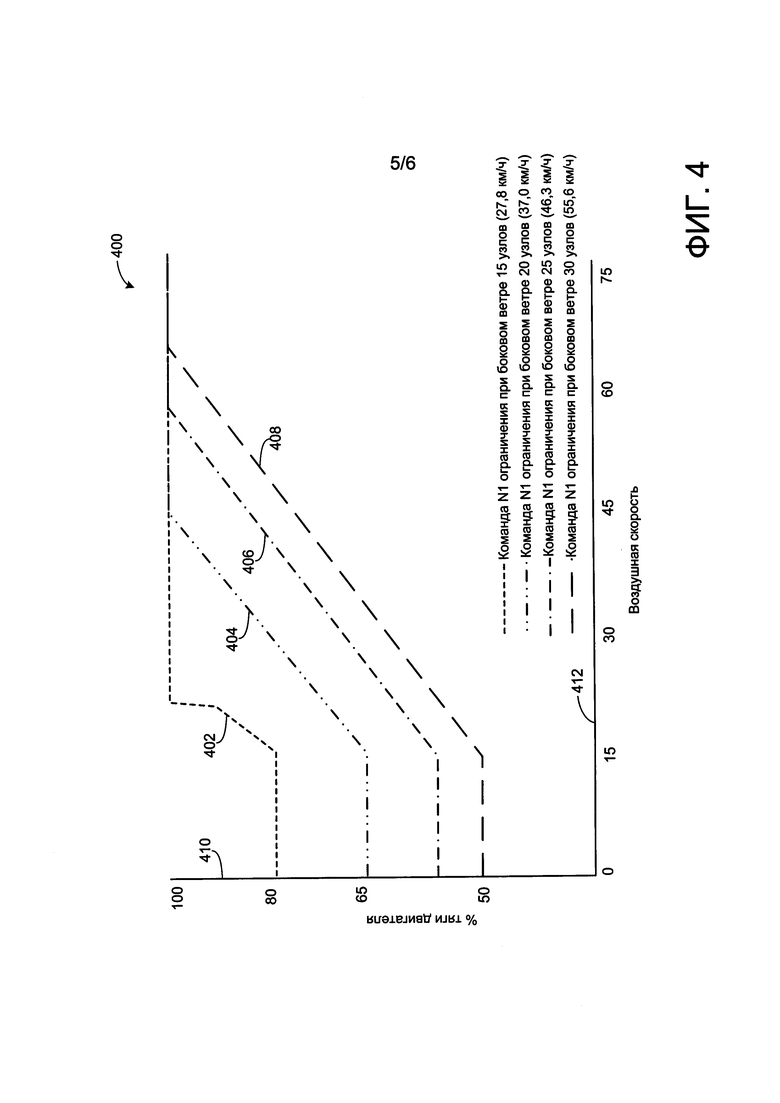
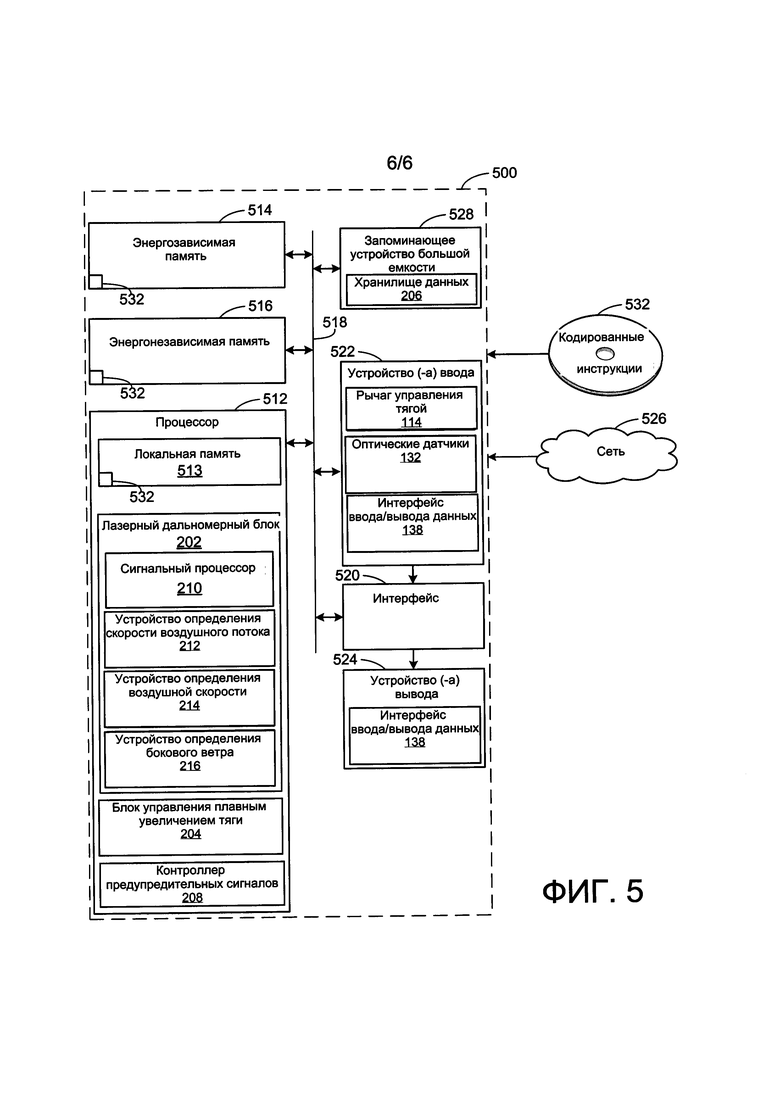
Группа изобретений относится к системе и способу управления тягой летательного аппарата, материальному компьютерочитаемому носителю данных, содержащих инструкции для осуществления способа. Система управления тягой содержит датчик измерения скорости бокового ветра, блок управления плавным увеличением тяги. Для осуществления способа измеряют скорость бокового ветра при выруливании летательного аппарата и сравнивают ее с диапазоном пороговых значений, плавно увеличивают тягу во время взлета при нахождении значений скорости бокового ветра в пределах диапазона пороговых значений, отключают режим увеличения тяги при значении скорости бокового ветра меньше нижнего значения диапазона и включают полный режим плавного увеличения тяги, если оно находится выше диапазона. Обеспечивается повышение ресурса двигателя летательного аппарата за счет возможности регулировки его тяги. 3 н. и 17 з.п. ф-лы, 5 ил.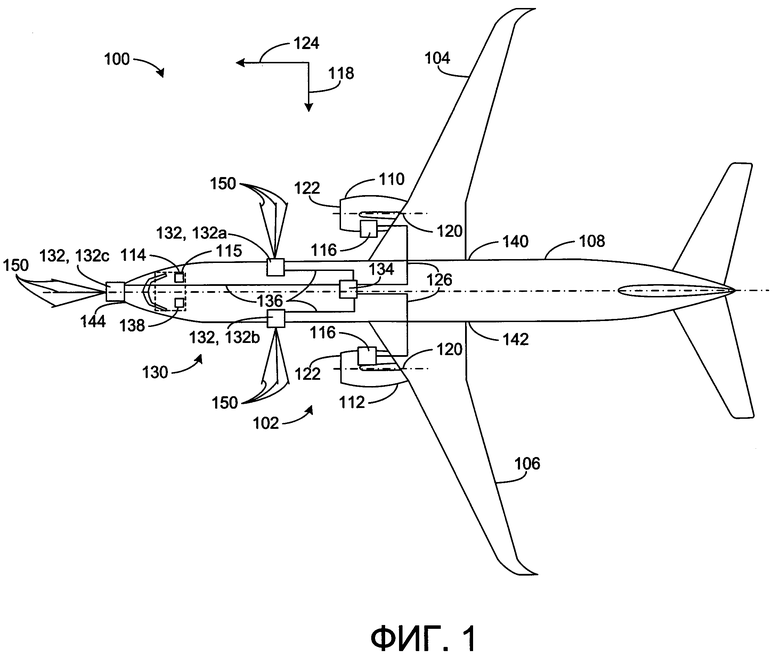
1. Система (102) управления тягой для использования с летательным аппаратом, содержащая:
датчик (132) для измерения скорости бокового ветра и
блок (204) управления плавным увеличением тяги для сравнения измеренной скорости бокового ветра с диапазоном пороговых значений бокового ветра и для приведения в действие режима частичного плавного увеличения тяги во время взлета, когда измеренная скорость бокового ветра находится в пределах диапазона пороговых значений бокового ветра,
при этом обеспечена возможность выбора режима частичного плавного увеличения тяги из множества режимов (402, 404, 406, 408) плавного увеличения тяги.
2. Система (102) по п. 1, в которой блок (204) управления плавным увеличением тяги выполнен с возможностью приема опорной скорости бокового ветра.
3. Система (102) по п. 2, в которой блок (204) управления плавным увеличением тяги выполнен с возможностью сравнения опорной скорости бокового ветра и измеренной скорости бокового ветра.
4. Система (102) по п. 3, также содержащая контроллер (208) предупредительных сигналов для инициирования предупредительного сигнала, когда опорная скорость бокового ветра меньше, чем измеренная скорость бокового ветра.
5. Система (102) по п. 1 или 2, в которой блок (204) управления плавным увеличением тяги выполнен с возможностью приведения в действие режима полного плавного увеличения тяги во время взлета, когда измеренная скорость бокового ветра больше, чем верхний предел диапазона пороговых значений бокового ветра.
6. Система (102) по п. 5, в которой блок (204) управления плавным увеличением тяги выполнен с возможностью отключения плавного увеличения тяги, когда измеренная скорость бокового ветра меньше, чем нижний предел диапазона пороговых значений бокового ветра.
7. Способ (300) управления тягой летательного аппарата, включающий:
измерение (304) скорости бокового ветра при выруливании летательного аппарата;
сравнение (312) измеренной скорости бокового ветра с диапазоном пороговых значений бокового ветра и
приведение в действие (324) режима частичного плавного увеличения тяги во время взлета на основе измеренной скорости бокового ветра, когда измеренная скорость бокового ветра находится в пределах диапазона пороговых значений бокового ветра.
8. Способ (300) по п. 7, также включающий применение (320, 322) режима полного плавного увеличения тяги во время взлета, когда измеренная скорость бокового ветра больше, чем верхний предел диапазона пороговых значений бокового ветра.
9. Способ (300) по п. 8, также включающий в себя отключение (314, 316) плавного увеличения тяги во время взлета, когда измеренная скорость бокового ветра меньше, чем нижний предел диапазона пороговых значений бокового ветра.
10. Способ (300) по п. 7 или 8, также включающий сравнение (306) опорной скорости бокового ветра и измеренной скорости бокового ветра и инициирование (310) предупредительного сигнала, когда опорная скорость бокового ветра меньше, чем измеренная скорость бокового ветра.
11. Способ (300) по п. 7 или 8, согласно которому обеспечение режима частичного плавного увеличения тяги включает в себя извлечение режима частичного плавного увеличения тяги из таблицы поиска.
12. Способ (300) по п. 7 или 8, также включающий измерение воздушной скорости летательного аппарата во время взлета и изменение ограничения выходной тяги как функции измеренной воздушной скорости.
13. Способ (300) по п. 12, также включающий уменьшение ограничения выходной тяги по мере увеличения измеренной воздушной скорости.
14. Материальный компьютерочитаемый носитель данных, содержащий инструкции, которые при своем исполнении побуждают машину:
измерять скорость бокового ветра;
сравнивать измеренную скорость бокового ветра с диапазоном пороговых значений бокового ветра и
приводить в действие режим частичного плавного увеличения тяги во время взлета на основе измеренной скорости бокового ветра, когда измеренная скорость бокового ветра находится в пределах диапазона пороговых значений бокового ветра.
15. Компьютерочитаемый носитель данных по п. 14, также содержащий инструкции, которые при своем исполнении побуждают машину применять режим полного плавного увеличения тяги во время взлета, когда измеренная скорость бокового ветра больше, чем верхний предел диапазона пороговых значений бокового ветра.
16. Компьютерочитаемый носитель данных по п. 15, также содержащий инструкции, которые при своем исполнении побуждают машину отключать плавное увеличение тяги во время взлета, когда измеренная скорость бокового ветра меньше, чем нижний предел диапазона пороговых значений бокового ветра.
17. Компьютерочитаемый носитель данных по п. 14 или 15, также содержащий инструкции, которые при своем исполнении побуждают машину сравнивать опорную скорость бокового ветра и измеренную скорость бокового ветра и инициировать предупредительный сигнал, когда опорная скорость бокового ветра меньше, чем измеренная скорость бокового ветра.
18. Компьютерочитаемый носитель данных по п. 14 или 15, также содержащий инструкции, которые при своем исполнении побуждают машину извлекать режим частичного плавного увеличения тяги, соответствующий измеренной скорости бокового ветра, из заданной таблицы поиска.
19. Компьютерочитаемый носитель данных по п. 14 или 15, также содержащий инструкции, которые при своем исполнении побуждают машину измерять воздушную скорость летательного аппарата во время взлета и изменять ограничение выходной тяги как функцию измеренной воздушной скорости.
20. Компьютерочитаемый носитель данных по п. 19, также содержащий инструкции, которые при своем исполнении побуждают машину уменьшать ограничение выходной тяги по мере увеличения измеренной воздушной скорости.
| WO 2013160626 A1, 31.10.2013 | |||
| WO 2013190218 A1, 27.12.2013 | |||
| US 0004763266 A1, 09.08.1988 | |||
| US 20100070112 A1, 18.03.2010 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТЯГОЙ МНОГОДВИГАТЕЛЬНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2383474C1 |

