Настоящее изобретение относится к области радиолокации, в частности к области испытания бортовых радиолокационных станций (РЛС) в лабораторных условиях.
При разработке современных РЛС широко используется полунатурное моделирование, при котором в лабораторных условиях создается сигнально-помеховая обстановка, соответствующая работе станции в реальных условиях. Это позволяет сократить временные и материальные затраты на отработку алгоритмов, точностную и функциональную проверки РЛС.
Комплексы для полунатурного моделирования базируются, в первую очередь, на создании физико-математических моделей отражений от объектов, позволяющих осуществлять имитацию в реальном времени. Имитация отражений в реальном времени является необходимым условием для проведения полноценного эксперимента, поскольку позволяет динамически изменять его условия: траекторию полета носителя РЛС, боевую обстановку, погодные условия. Согласно теории радиолокации протяженных целей, для замещения отражений от распределенных объектов общепринятой является многоточечная геометрическая модель, предложенная Р. Делано. Основная идея при этом заключается в представлении моделируемого объекта совокупностью некоторого количества статистически независимых излучателей, распределенных в области пространства, ограниченной размерами моделируемого объекта. Таким образом, в основу модели Делано положены физические особенности образования сигнала, рассеянного сложным объектом. Основная проблема, возникающая при разработке и использовании таких моделей, заключается в том, что для обеспечения достаточной точности моделирования требуется использовать огромное число отражателей. При моделировании необходимо рассчитывать сигнал для каждого излучателя. Это не позволяет выполнять имитацию отражений в реальном времени без использования уникальных вычислительных средств.
Известны способы имитации радиолокационных отражений, при которых при помощи двух излучателей изменяют положение кажущегося центра излучения (КЦИ), который характеризует направление, с которого поступает электромагнитная волна. Двухточечные модели, а также результаты их исследований рассмотрены в работах: Статистическая теория радиолокации протяженных целей. / Р.В. Островитянов, Ф.А. Басалов - М.: Радио и связь, 1982. - 232 с.; Рассеяние радиоволн на телах сложной формы./ Штагер Е.А. - М.: Радио и связь, 1986. - 184 с., Малоточечная модель протяженного отражающего объекта/ А.В. Киселев, А.В. Никулин, С.В. Тырыкин// Доклады АН ВШ РФ. Новосибирск: Изд-во НГТУ, 2014. С. 78-88 и др.
На основе двухточечной модели построены такие устройства как: US патент №20090058715 «Methods and systems for generating virtual radar targets», 2009; US патент №6950057 «Complex radar target simulator», 2005; US патент №4467327 «Active millimeter wave simulator for missile seeker evaluations», 1984; US патент №5457463 «Radar return signal simulator», 1995; US патент №4660041 «Radar scene simulator», 1987, РФ патент №2386143, 2009 и устройства описанные в публикациях: Thierry Cathala, Jean Latger. Image simulation for HardWare In the Loop simulation in EO domain. Target and Background Signatures. Proc. of SPIE Vol. 9653. 2015., J. Ma, C. Jin, B. Shi, и D. Chen, «Analysis of the Simulation Fidelity in Millimeter Wave Simulation System», в Theory, Methodology, Tools and Applications for Modeling and Simulation of Complex Systems, 2016, pp. 333-343. и др.
Все эти устройства моделируют на апертуре приемной антенны, исследуемой РЛС электромагнитные поля, соответствующие отражениям от точечной радиолокационной цели. Они представляют собой формирователь радиолокационных эхосигналов и излучающую часть, состоящую из совокупности неподвижных антенн. В устройствах используется один из трех принципов перемещения цели по угловым координатам.
Первый принцип заключается механическом перемещение излучающей антенны. В этом случае излучающая антенна имитатора является подвижной. Она может быть, как установленной на подвижной каретке, так и располагаться на каком-либо носителе. Перемещение излучателя по угловым координатам моделирует пространственные перемещения объекта. Как правило, излучение производится из одной точки. Следовательно, подобные устройства могут быть использованы при моделировании отражений лишь от точечных объектов. Кроме того, подобным устройствам присущи достаточно серьезные ограничения по скорости и диапазону угловых перемещений имитируемого объекта.
Второй принцип заключается в коммутации излучающих антенн. Имитатор содержит совокупность неподвижных антенн. В каждый момент времени эхосигнал от точечной цели излучают лишь одной антенной, угловое положение которой соответствует угловому положению моделируемой точечной цели. К недостаткам этого способа можно отнести дискретность изменения углового положения цели. Для обеспечения малого шага переключения углового положения требуется большое количество антенн и сложный коммутатор СВЧ сигналов.
Третий принцип основан на использовании двухточечной или трехточечной когерентных геометрических моделей. Излучатели трехточечной модели располагаются в вершинах правильного треугольника. В точке наблюдения присутствует суммарный сигнал от двух или трех антенн. РЛС измеряет его параметры и оценивает угловые положения КЦИ. Угловое положение КЦИ зависит от отношения уровней сигналов, подводимых к этим излучателям и их разности фаз. С использованием этого способа возможно моделировать точечные объекты с изменяющимися угловыми координатами. Недостатком этого принципа является то, что для моделирования отражений от распределенных объектов, необходимо значительно увеличивать количество излучающих точек.
Прототипом предлагаемого изобретения является способ имитации радиолокационных отражений, описанный в патенте №2610837 «Способ имитации радиолокационных отражений», 2017. При использовании этого способа осуществляют наложение допплеровских флуктуаций, соответствующих отражениям от распределенного объекта на зондирующий сигнал РЛС, переносят сформированные сигналы на рабочую частоту и подводят к излучающим антеннам, отличающийся тем что рассчитывают три статистически не зависимые реализации эхосигнала от замещаемого объекта, для всех элементов разрешения по дальности устанавливают заданные уровни мощности каждой из рассчитанных реализаций сигналов, из совокупности антенн, расположенных неэквидистантно, определяют номера трех излучающих антенн, расположенных на одной линии. Затем к антеннам подводят рассчитанные реализации сигналов, при этом номера излучающих антенн определяют, исходя из определения границ изменения диапазона, в котором возможно независимое управление угловым положением и угловым размером моделируемого объекта.
Однако, описанный способ имеет следующий недостаток: при линейном расположении излучателей могут быть сформированы отражения лишь от одномерных объектов. В тоже время, большинство реальных радиолокационных объектов являются распределенными по двум координатам угловым координатам (азимуту и углу места).
Задачей (техническим результатом) предлагаемого «Способа имитации радиолокационных отражений» является формирование радиолокационных отражений от двумерных поверхностно-распределенных объектов в реальном масштабе времени.
Поставленная задача достигается тем, что в известном способе имитации радиолокационных отражений, в реальном масштабе времени осуществляют формирование электромагнитного поля на апертуре антенны исследуемого устройства, соответствующего отражениям от распределенного объекта, с учетом местоположения, параметров движения носителя РЛС и замещаемого объекта, его отражающей способности, углового шума, заключающимся в том, что на рабочей частоте РЛС формируют пять некоррелированных сигналов с заданными спектральными свойствами, сумма которых является эхосигналом от замещаемого объекта, а их мощности устанавливают исходя из параметров распределения угловых шумов для двух ортогональных направлений угловых координат, сигналы подводят к пяти излучателям, четыре из которых размещаются в углах квадрата, а пятый в пределах этого квадрата.
На фиг. 1 показано положение точек геометрической модели на плоскости.
На фиг. 2. изображена укрупненная структура комплекса полунатурного моделирования, на основе устройства, реализующего предложенный способна основе предложенной пятиточечной двумерной геометрической модели.
Координаты излучающих точек (1)-(5) геометрической модели (6) (фиг. 1.) в полярной системе координат: (L1, ψ1)=(L, ψ); (L2, ψ2)=(L, π-ψ); (L3, ψ3)=(L, -ψ); (L4,ψ4)=(L, -π+ψ); (L5, ψ5).
Если пеленг объекта производится вдоль оси OY (θ=π/2, плоскость азимута) или оси ОХ (θ=0, плоскость угла места) модель сводится к трехточечной неэквидистантной с параметрами:
θ=0:

где,
ξi - проекции координаты i-й излучающей точки на два ортогональных направления обобщенной координаты ξ,
m и μ - параметры плотности распределения вероятности (ПРВ) угловых шумов,
 - дисперсия сигнала i-й излучающей точки.
- дисперсия сигнала i-й излучающей точки.
Математическое ожидание и параметр μ ПРВ угловых шумов модели, для каждой из проекций, определяются выражениями:

Таким образом, получили для каждого из ортогональных направлений обобщенной координаты систему линейных алгебраических уравнений (СЛАУ) из трех уравнений с тремя неизвестными параметрами  ,
,  и
и  . Решение этой СЛАУ:
. Решение этой СЛАУ:
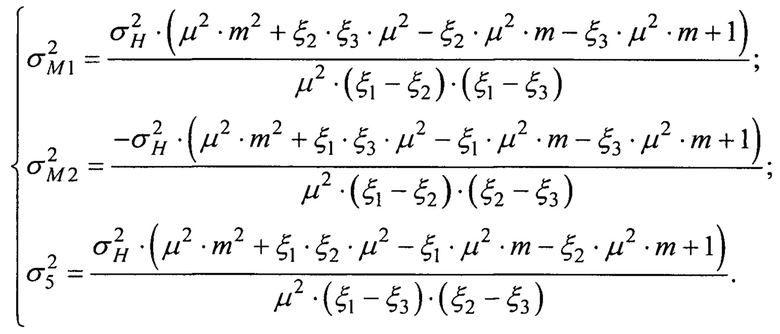
Из полученных соотношений видно, что пятиточечная геометрическая модель позволяет раздельно управлять параметрами ПРВ угловых шумов по двум ортогональным направлениям. Параметры ПРВ при θ=0 определяются суммой дисперсий сигналов  и
и  , а так же дисперсией
, а так же дисперсией  , а при
, а при  суммой дисперсий
суммой дисперсий  и
и  и
и  .
.
Границы диапазона, в котором возможно раздельное управление параметрами m и μ:
Однако в случае двумерной модели к условию (3) должно добавиться еще одно соотношение. Оно характеризует равенство дисперсий пятого излучателя для моделей по двум ортогональным направлениям  Его можно записать через параметры модели (для краткости записи проекции на направление обобщенной координаты при θ=0 обозначены индексами X, при
Его можно записать через параметры модели (для краткости записи проекции на направление обобщенной координаты при θ=0 обозначены индексами X, при  - индексами Y):
- индексами Y):

Полученное соотношение (4) определяет ограничения, накладываемые конфигурацией пятиточечной геометрической модели, на области независимого управления параметрами ПРВ угловых шумов по двум ортогональным направлениям обобщенной координаты. Для заданной конфигурации излучающих точек модели независимое управление параметрами ПРВ угловых шумов по двум ортогональным направлениям возможно лишь при выполнении равенства (4).
Выражение (4) не сложно преобразовать к виду:

Эта запись говорит о взаимосвязи областей допустимых значений параметров ПРВ угловых шумов по одной из координат при заданных m и μ по другой. Так, например, если по одной из координат область допустимых значений, которые могут принимать параметры ПРВ угловых шумов, определяется системой уравнений (3) и соответствует трехточечной неэквидистантной модели, то по второй координате модель, по сути, сводится к двухточечной, с величиной базы (расстоянием между излучателями) равной:

Таким образом, по второй координате появляется жесткая взаимосвязь параметров m и μ, свойственная двухточечной модели.
Важно отметить, что при синтезе пятиточечной модели можно произвольно выбрать координату, по которой ей будут свойственны ограничения (3), т.е. возможности трехточечной неэквидистантной геометрической модели. Это приведет к тому, что по другой координате возможности модели будут определяться соотношением (4).
Укрупненная структура комплекса полунатурного моделирования (фиг. 2) содержит:
Слабонаправленные антенны (1) - (5), соответствующие точкам геометрической модели (6). Максимум их диаграммы направленности ориентирован в сторону антенны РЛС. Поляризация антенн совпадает с поляризацией антенны исследуемой РЛС.
Имитатор эхосигналов (7), осуществляющий расчет отсчетов комплексных огибающих пяти сигналов, подводимых к излучателям, задание их мощностей и формирование радиочастотных сигналов;
Исследуемую РЛС (8), осуществляющую прием и обработку сигналов;
Информационный канал связи (9), по которому в имитатор передается информация о режиме работы РЛС.
Способ реализуется следующим образом. От РЛС в имитатор эхосигналов поступает информация о текущем режиме работы и сигналы, обеспечивающие временную и частотную привязку. После этого выполняют следующую последовательность действий:
Рассчитывают параметры эхосигнала от распределенного объекта и его угловых шумов с учетом геометрии взаимного расположения и движения носителя РЛС и замещаемого объекта, ориентации диаграммы направленности антенны РЛС, параметров зондирующего сигнала (мощности, форма доплеровского спектра, mX, mY, μX, μY);
Затем, рассчитывают мощности пяти сигналов, подводимых к излучающим антеннам (точкам модели) для обеспечения параметров угловых шумов, соответствующих замещаемому объекту, распределенному по двум угловым координатам;
После этого, с учетом рассчитанных величин производят вычисление отсчетов комплексных огибающих (КО) пяти некоррелированных сигналов, сумма которых является эхосигналом от распределенного объекта;
В итоге, для рассчитанных КО формируют пять радиочастотных сигналов, подводимых к излучающим антеннам (точкам модели). Все сигналы являются некоррелированными нормальными случайными процессами с заданными спектрально-корреляционными свойствами.
Техническим результатом предлагаемого «Способа имитации радиолокационных отражений» является появление возможности формирование радиолокационных отражений от двумерных поверхностно-распределенных объектов в реальном масштабе времени.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ имитации радиолокационных отражений от протяженных целей | 2022 |
|
RU2815439C1 |
| СПОСОБ ИМИТАЦИИ РАДИОЛОКАЦИОННЫХ ОТРАЖЕНИЙ | 2015 |
|
RU2610837C1 |
| Способ имитации радиолокационных отражений для систем с двумя приемными антеннами | 2021 |
|
RU2782407C1 |
| СПОСОБ И УСТРОЙСТВО ИМИТАЦИИ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2011 |
|
RU2489753C2 |
| Имитатор радиолокационных целей | 2021 |
|
RU2787576C1 |
| ИМИТАТОР РАДИОЛОКАЦИОННОГО СИГНАЛА СЦЕНЫ | 2014 |
|
RU2549884C1 |
| СПОСОБ ИМИТАЦИИ РАДИОСИГНАЛА, ОТРАЖЕННОГО ОТ ПРОСТРАНСТВЕННО РАСПРЕДЕЛЕННОЙ ДИНАМИЧЕСКОЙ РАДИОФИЗИЧЕСКОЙ СЦЕНЫ, В РЕАЛЬНОМ ВРЕМЕНИ | 2008 |
|
RU2386143C2 |
| ИМИТАТОР РАДИОЛОКАЦИОННОЙ ЦЕЛИ | 1979 |
|
SU1840948A1 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ ЦЕЛЕЙ | 1997 |
|
RU2125275C1 |
| СПОСОБ НАБЛЮДЕНИЯ ЗА ПОВЕРХНОСТЬЮ И ВОЗДУШНОЙ ОБСТАНОВКОЙ НА БАЗЕ МНОГОКАНАЛЬНОЙ БОРТОВОЙ РЛС | 2006 |
|
RU2316787C1 |
Изобретение относится к области радиолокации, в частности к области испытания бортовых радиолокационных станций (РЛС) в лабораторных условиях. Технический результат состоит в появлении возможности формирования радиолокационных отражений от двумерных поверхностно-распределенных объектов в реальном масштабе времени. Для этого в способе в реальном масштабе времени осуществляют формирование электромагнитного поля на апертуре антенны исследуемого устройства, соответствующего отражениям от распределенного объекта, с учетом местоположения, параметров движения носителя РЛС и замещаемого объекта, его отражающей способности, углового шума. При этом на рабочей частоте РЛС формируют пять некоррелированных сигналов с заданными спектральными свойствами, сумма которых является эхосигналом от замещаемого объекта, а их мощности устанавливают исходя из параметров распределения угловых шумов для двух ортогональных направлений угловых координат, сигналы подводят к пяти излучателям, четыре из которых размещаются в углах квадрата, а пятый - в пределах этого квадрата. 2 ил.
Способ имитации радиолокационных отражений, состоящий в том, что в реальном масштабе времени осуществляют формирование электромагнитного поля на апертуре антенны исследуемого устройства радиолокационной станции (РЛС), соответствующего отражениям от распределенного объекта, с учетом местоположения, параметров движения носителя РЛС и замещаемого объекта, его отражающей способности, углового шума, отличающийся тем, что формирование электромагнитного поля на апертуре антенны РЛС осуществляют на рабочей частоте посредством имитатора эхосигналов, формирующего пять некоррелированных сигналов с заданными спектральными свойствами, сумма которых является эхосигналом от замещаемого объекта, а мощности пяти некоррелированных сигналов устанавливают исходя из параметров распределения угловых шумов для двух ортогональных направлений угловых координат, сигналы подводят к пяти излучателям имитатора эхосигналов, которые размещают в пяти излучающих точках геометрической модели в полярной системе координат, расположенной на апертуре антенны исследуемого устройства (РЛС), при этом излучатели имитатора эхосигналов представляют собой слабонаправленные антенны, максимумы диаграммы направленности которых ориентированы в сторону антенны РЛС, при этом поляризация излучателей имитатора эхосигналов совпадает с поляризацией антенны РЛС, причем четыре излучающих точки размещают в углах квадрата геометрической модели, а пятую точку - в пределах этого квадрата.
| US 4467327 A, 21.08.1984 | |||
| СПОСОБ ИМИТАЦИИ РАДИОЛОКАЦИОННЫХ ОТРАЖЕНИЙ | 2015 |
|
RU2610837C1 |
| US 5457463 A, 10.10.1995 | |||
| US 4660041 A, 21.04.1987 | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| US 6950057 B1, 19.092001. | |||

