Изобретение относится к области радиолокационной техники, а именно к устройствам, предназначенным для имитации пространственной и частотно-временной структуры радиолокационных сигналов, содержащих комбинацию отражений от одной или нескольких подвижных или стационарных целей на фоне сигналов, отраженных подстилающей поверхностью и пассивными помехами, для различных типов радиолокационных систем (РЛС), включая моноимпульсные когерентные РЛС.
Общей проблемой создания имитаторов радиолокационных целей является многообразие типов сигналов РЛС: импульсное, непрерывное, с различными видами модуляции и пр., а также режимов их работы: поиск, сопровождение и их чередование в различных диапазонах дальностей и углов обзора. В настоящее время для каждого конкретного типа РЛС и радиовысотомера применяется также конкретный имитатор. Это приводит к их большому типажу, что приводит к увеличению общей стоимости и неудобству эксплуатации имитаторов при производстве, настройке и тестировании РЛС.
В современных радиолокаторах для повышения точности и/или защиты от помех, а также для получения дополнительной информации о целях, используют различные сигналы с переменными параметрами: периодом и полосой модуляции, длительностью и видом модуляции. Кроме того, каждый образец РЛС может иметь индивидуальные отклонения, обусловленные неточностью настройки и нестабильностью параметров радиоэлементов. Указанные особенности исключают возможность предварительного расчета отраженного сигнала даже в случае точно заданных траекторий движения и имитируемого рельефа подстилающей поверхности. Поэтому расчет отраженного сигнала и последующее его воспроизведение необходимо выполнять в реальном масштабе времени на основе конкретной формы - реализации зондирующего сигнала, сохраняя возможность последующей когерентной обработки сымитированных сигналов в радиолокаторе.
Это приводит к необходимости прямой имитации отраженного сигнала как суммы сигналов, отраженных различными достаточно малыми по сравнению с облучаемой площадью участками поверхности или эквивалентными блестящими точками.
Известно устройство для имитации радиолокационных портретов реальных целей (Перунов Ю.М., Фомичев К.И., Юдин Л.М. «Радиоэлектронное подавление информационных каналов систем управления оружием», М.: «Радиотехника», 2008, с. 134-135), в котором зондирующий импульс от радиолокатора, для которого создается радиолокационный портрет, поступает через приемную антенну, усилитель, устройство грубой задержки, устройство точной задержки, модуляторы набора модуляторов и сумматор на выход имитатора. Устройство грубой задержки осуществляет задержку по времени, соответствующую расстоянию до ближайшей блестящей точки имитируемой цели. Линия задержки (ЛЗ) с отводами обеспечивает имитацию блестящих точек цели. Амплитудные и фазовые модуляции выполняются в модуляторах набора модуляторов с помощью эталонных сигналов, соответствующих характеристикам целей. С выходов модуляторов сигналы, имитирующие соответствующие блестящие точки, поступают на сумматор и далее в передающую антенну. Описанное устройство имитирует сигнал одиночной цели с одного направления в одном канале приема, при этом не уделено внимание необходимости реализации одновременной имитации различных типов целей в различных сценариях имитации для различных типов радиолокаторов.
Известны имитаторы радиолокационной цели (патенты РФ 2317563, 2402036), использующие две передающие антенны, в которых внешний сигнал, совпадающий с зондирующим сигналом РЛС, запускает формирователь отраженного сигнала, формирующий СВЧ импульс на несущей частоте, задержанный относительно запускающего сигнала в соответствии с расстоянием для цели и модулированный по амплитуде законом амплитудной флюктуации отраженного сигнала. Для имитации углового положения цели полученный сигнал делится на два канала, в каждом из которых осуществляется независимая регулировка мощности, усиливаются по мощности и излучаются в сторону проверяемой РЛС через две передающие антенны. При этом угловое положение энергетического центра (ЭЦ) переизлучения имитируемой цели определяется не только геометрическим положением антенной системы имитатора, но также соотношением мощностей сигналов, излучаемых передающими антеннами, что позволяет моделировать изменение углового положения цели без механического перемещения антенной системы имитатора.
Известны устройства и способы реализации имитации на основе метода радиочастотной памяти для РВС и РЛС с различными видами излучения (патенты РФ 2486540, 2504799, 2568899, 2625567, 2676469, 2522502, патент на полезную модель РФ 186130). Группа вышеперечисленных патентов содержит описания изобретений для имитации отраженных сигналов точечных или распределенных по дальности целей, находящихся в одном угловом направлении без возможности имитации пространственной структуры радиолокационных сигналов подвижных в 2-х плоскостях по угловым координатам целей.
Известен имитатор углового положения цели для моноимпульсной когерентной РЛС (пат РФ 2391682), в котором использует две пары передающих антенн в азимутальной плоскости, позволяющие выполнять имитацию углового положения множества разрешаемых элементов сцены в азимутальной плоскости при ориентации оси Ох моноимпульсной антенной системы РЛС βА, отличной от направления на центр передающей антенной системы имитатора βИ, |βА - βИ|≤0,5 ΔθПХ, где ΔθПХ - половина ширины рабочего участка пеленгационной характеристики моноимпульсной РЛС. Это позволяет имитировать угловое положение элементов сцены по заданному оператором закону βA(t). Недостатком способа и устройства (пат. РФ 2391682) является имитация углового положения элементов сцены только в одной плоскости.
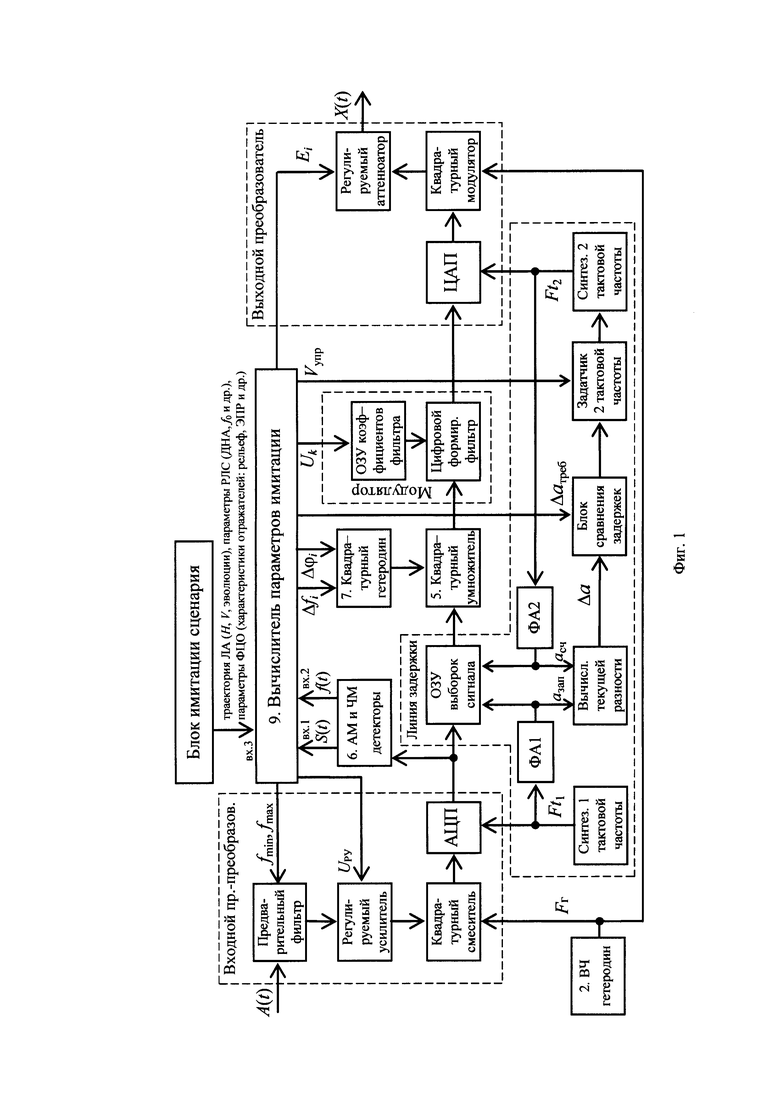
Известно устройство имитатора отраженных радиолокационных сигналов (патент на полезную модель РФ 189247), принятое в качестве прототипа, как наиболее близкое по конструкции и принципу работы к заявляемому устройству. Прототип (фиг. 1) содержит высокочастотный гетеродин, входной приемник-преобразователь, блок AM и ЧМ детекторов, переменную (управляемую) линию задержки, квадратурный умножитель, квадратурный гетеродин, модулятор, выходной преобразователь, вычислитель параметров имитации и блок имитации сценария. Прототип выполняет формирование частотно-временной структуры отраженного сигнала на основе текущего излучаемого РЛС сигнала с динамическим управлением параметрами имитации задержки, доплеровской частоты и ослабления формируемого сигнала при произвольном виде модуляции зондирующего сигнала радиолокатора, без дополнительных связей и импульсов запуска от проверяемой РЛС, но не имеет возможности имитации углового положения цели.
Технической задачей предлагаемого изобретения является имитация сигнала сцены для моноимпульсных когерентных РЛС, обеспечивающая как имитацию эхосигналов в координатах «дальность-доплеровская частота», так и углового положения элементов сцены в двух плоскостях при произвольном виде модуляции зондирующего сигнала радиолокаторабез дополнительных связей с проверяемой РЛС.
Технический результат достигается за счет введения (прототип патент на полезную модель РФ 189247) в имитатор одной приемной антенны и четырех передающих с крестообразным размещением их пар, две в горизонтальной плоскости и две в вертикальной плоскости, и дополнительных трех параллельных каналов формирования излучаемых сигналов. Каждая передающая антенна запитана выходом соответствующего канала формирования излучаемого сигнала. Передающие антенны установлены на равных расстояниях от фазового центра антенной системы проверяемого радиолокатора (АС РЛС), а в моделируемых горизонтальной и вертикальной плоскостях - на расстояниях, соответствующих размерам пятна облучения антенны исследуемого радиолокатора на сфере размещения передающих антенн имитатора (в центре сферы АС РЛС). Ось АС РЛС проходит через середины баз, соединяющих первую пару антенн Y1 и Y2 и вторую пару антенн Z1 и Z2, при этом база первой пары передающих антенн Y1 и Y2 ориентирована в вертикальной плоскости, база второй пары антенн Z1 и Z2 ортогональна оси 0x АС РЛС и базе первой пары.
Параметры сигналов, формируемых в четырех параллельных каналах и излучаемых четырьмя антеннами сигналов, динамически перестраиваются путем свертки наблюдаемой модуляции зондирующего сигнала с расчетными импульсными характеристиками сцены в дискретных положениях радиолокатора, разнесенных по времени периодом повторения зондирующих импульсов радиолокатора.
Для решения поставленной задачи с возможностью цифрового управления параметрами углового положения имитируемых элементов сцены в 2-х плоскостях в различных сценариях имитации для различных типов радиолокаторов, в базу данных сценариев имитации введены данные о радиолокационном портрете разных типов целей, параметрах рассеяния подстилающих поверхностей и пассивных помех: (rk, βk, εk, νk, δk) -дальность, угол азимута, угол места, радиальная скорость и эффективная площадь рассеяния (ЭПР) каждого k-го элемента сцены. При описании поверхностно- и объемно-распределенных поверхностей (целей), элементы сцены - точки k могут быть расположены в узлах трехмерной сетки с размерами по угловым координатам и дальности меньшими или равными половинному разрешению РЛС в соответствующих направлениях.
Наличие интерфейса ввода-вывода позволяет использовать имитатор в составе комплексов полунатурного моделирования путем согласования режимов работы РЛС и имитатора, передачи дополнительных параметров сцены (моделируемых траекторий РЛС и цели), ввода-вывода контрольных и управляющих сигналов.
Изобретение является новым, поскольку авторам не известны способы и устройства, содержащие совокупность характеристик, которые фигурируют в предлагаемом изобретении в качестве отличительных признаков.
Сущность изобретения поясняется чертежами, на которых приведены:
- на фиг. 1 - структурная схема имитатора - прототипа;
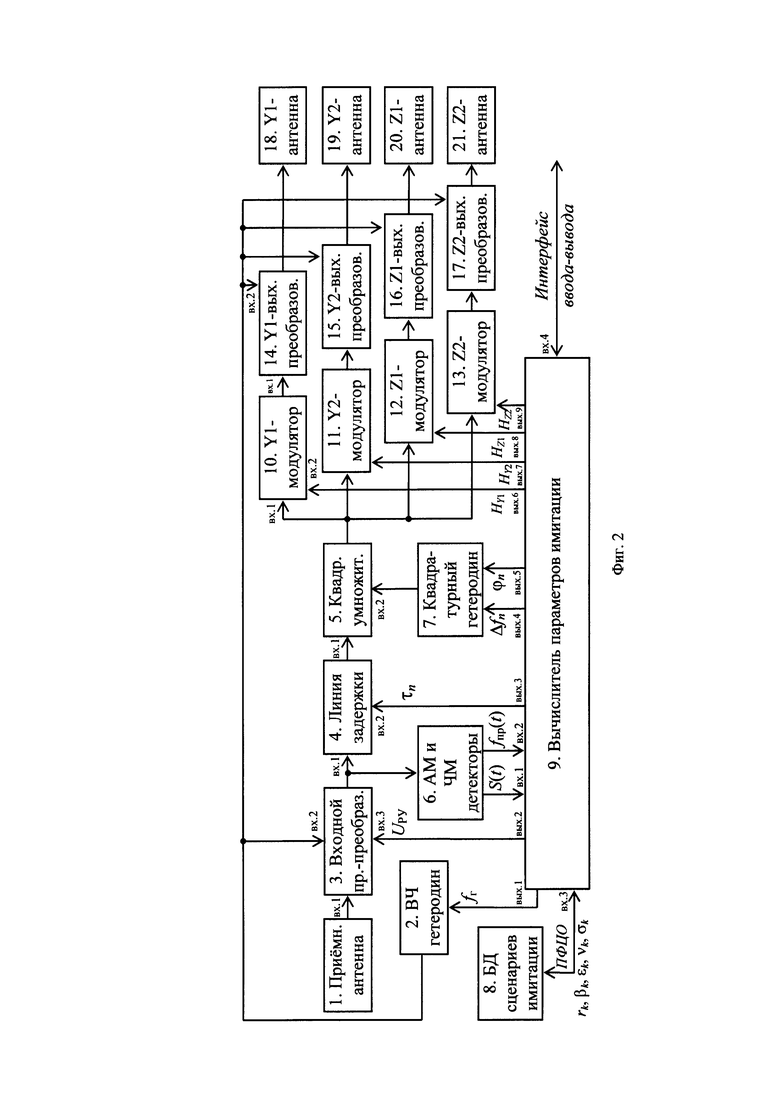
- на фиг. 2 - структурная схема имитатора радиолокационного сигнала целей на фоне подстилающей поверхности и пассивных помех;
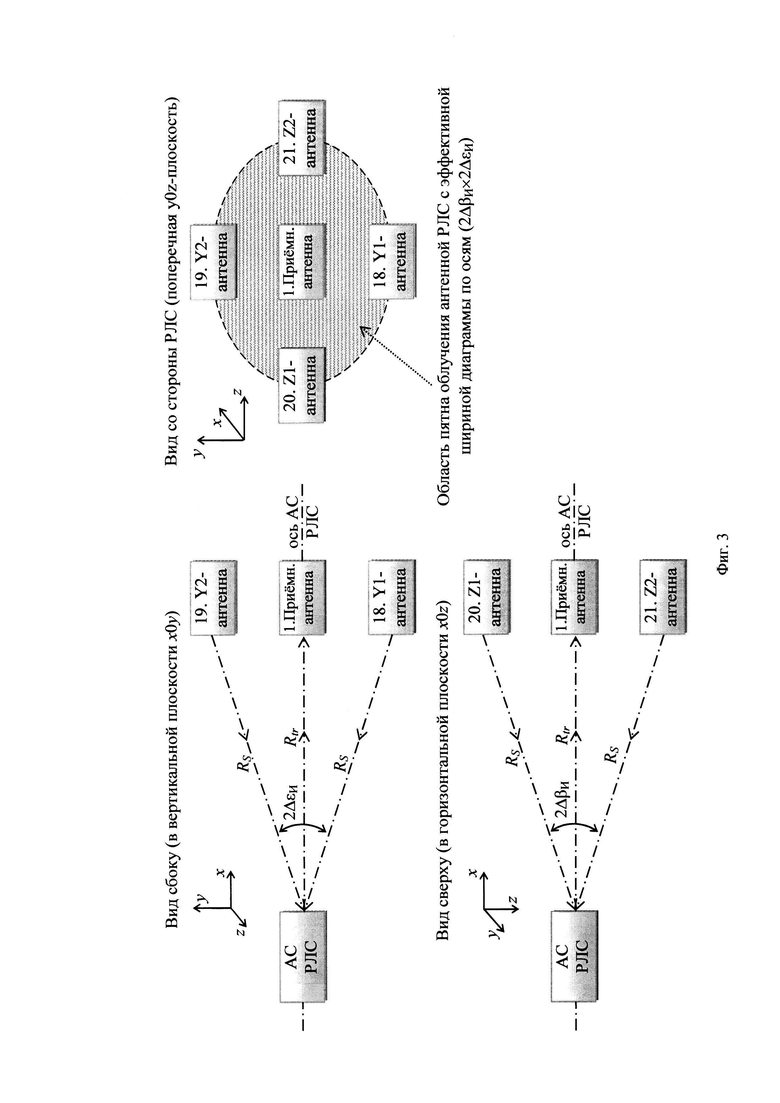
- на фиг. 3 - взаимное положение антенн имитатора и РЛС в трех плоскостях;
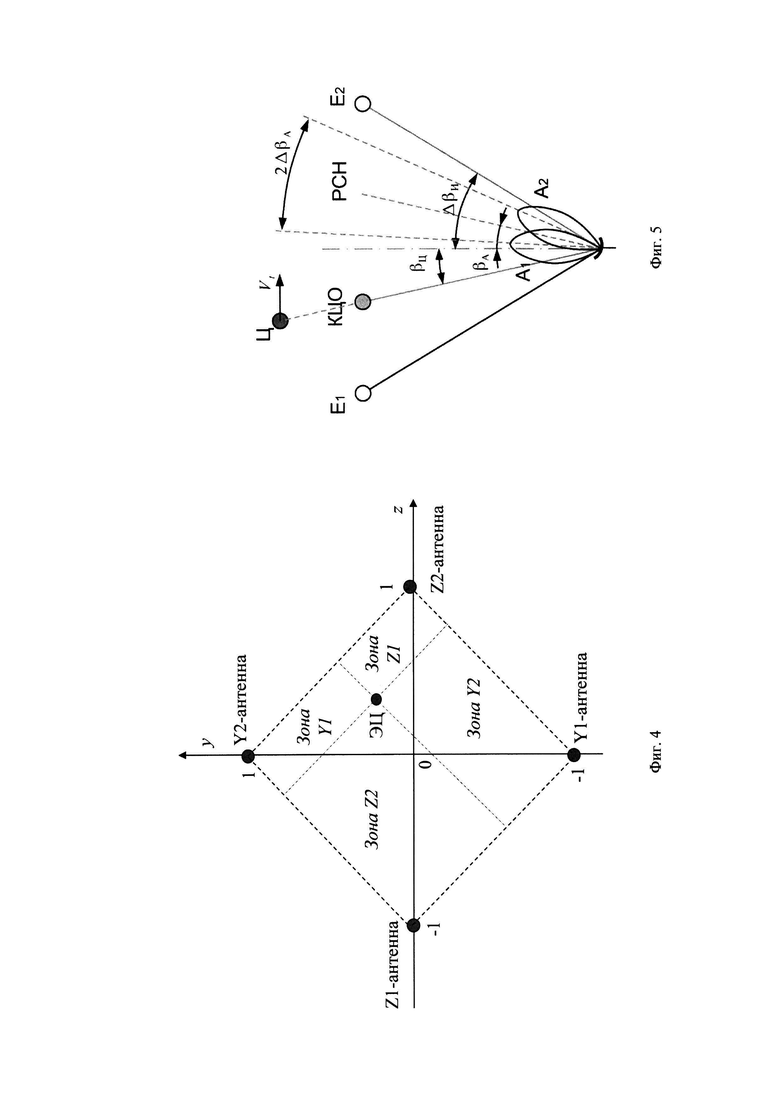
- на фиг. 4 - двумерное распределение мощностей имитируемого энергетического центра (ЭЦ) блестящей точки в угловых координатах, нормированных к половине ширины диаграммы направленности (ДН) ΔβИ, ΔεИ в соответствующей плоскости АС РЛС;
- на фиг. 5 - геометрия и обозначения направлений углов ДН АС РЛС, цели и антенн имитатора в горизонтальной плоскости x0z (в вертикальной плоскости х0у обозначения аналогичны);
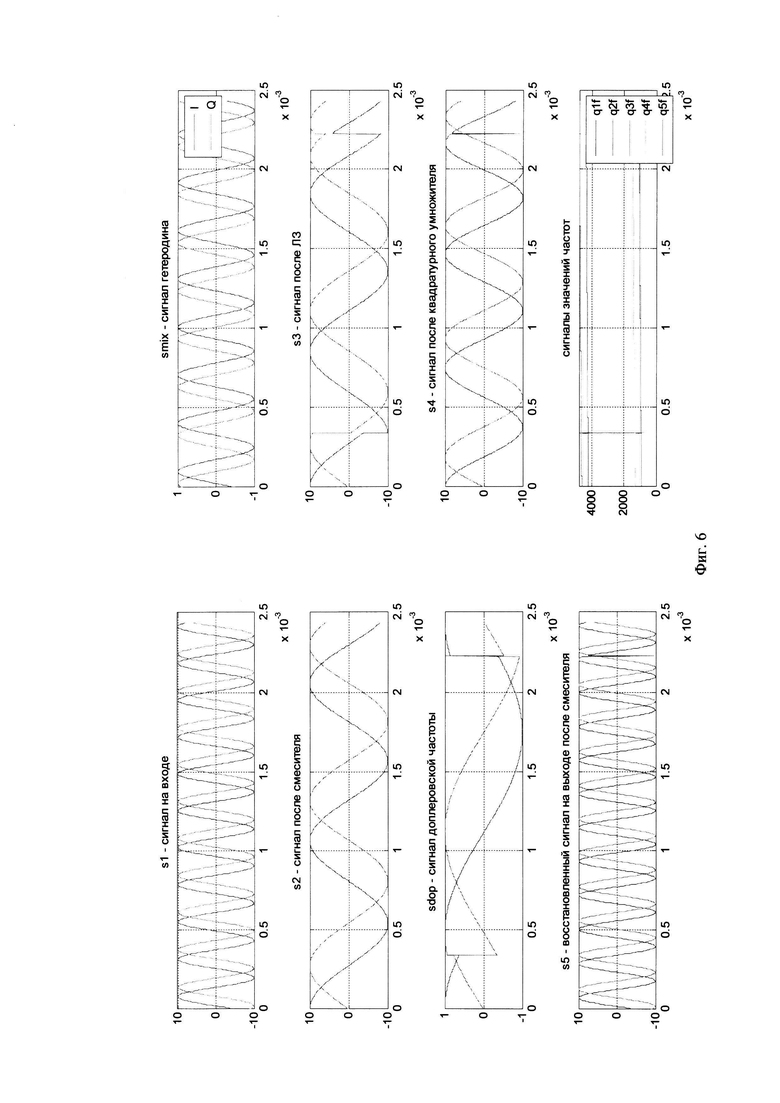
- на фиг. 6 - графики примера процесса коррекции скачка по фазе на промежуточной частоте при дискретном изменении дальности подвижной цели.
На фиг. 2 показана предлагаемая структурная схема имитатора радиолокационных целей, на которой изображены:
1 - приемная антенна;
2 - высокочастотный (ВЧ) гетеродин;
3 - входной приемник-преобразователь;
4 - управляемая линия задержки;
5 - квадратурный умножитель;
6 - блок амплитудного и частотного (AM и ЧМ) детекторов;
7 - квадратурный гетеродин;
8 - база данных (БД) сценариев имитации;
9 - вычислитель параметров имитации;
10 - Y1 -модулятор;
11 - Y2-модулятор;
12 - Z1 -модулятор;
13 - Z2-модулятор;
14 - Y1-выходной преобразователь;
15 - Y2-выходной преобразователь;
16 - Z1-выходной преобразователь;
17 - Z2-выходной преобразователь;
18 -Y1-антенна;
19 - Y2-антенна;
20 -Z1-антенна;
21 - Z2-антенна.
Предлагаемый имитатор радиолокационных целей содержит последовательно соединенные приемную антенну 1, входной приемник-преобразователь 3, управляемую линию задержки 4, квадратурный умножитель 5, с разветвлением его выхода на последовательно соединенные четыре модулятора 10-13, четыре выходных преобразователя 14-17 и четыре выходных антенны 18-21. Высокочастотный гетеродин 2 имеет выход, соединенный со вторыми входами входного приемника-преобразователя 3 и всех четырех выходных преобразователей 14-17. Первый выход вычислителя параметров имитации соединен с управляющим входом ВЧ гетеродина 2. Блок амплитудного и частотного детектора 6 имеет вход, соединенный с выходом входного приемника-преобразователя 3, а выходные сигналы амплитуды и частоты детектируемого сигнала соединены с первым и вторым входом вычислителя параметров имитации 9, первый выход которого соединен с входом ВЧ гетеродина 2 для управления его частотой настройки, второй выход соединен с третьим входом входного приемника-преобразователя 3 для управления усилением, четвертый и пятый выходы вычислителя параметров имитации 9 с информацией о требуемой частоте и фазе сигнала на выходе квадратурного гетеродина 7 поступают на его управляющие входы, выход квадратурного гетеродина 7 поступает на второй сигнальный вход квадратурного умножителя 5, третий выход вычислителя параметров имитации 9 с информацией о требуемой величине задержки поступает на второй управляющий вход управляемой линии задержки 4, с шестого по девятый выходы параметров модуляции вычислителя параметров имитации 9 поступают на вторые управляющие входы модуляторов 10-13.
Третий вход-выход вычислителя параметров имитации 9 является входом-выходом интерфейса базы данных (БД) сценариев имитации 8, используемым для передачи параметров фоно-целевой обстановки (ПФЦО) для работы имитатора.
Четвертый вход-выход вычислителя параметров имитации 9 является входом-выходом двунаправленного шинного интерфейса, используемым для связи с внешним задатчиком для:
 ввода параметров имитации - ПФЦО: маршрут летательного аппарата (ЛА), его скорость, курс и высота, ЭПР элементов сцены и цели (целей), координаты элементов сцены (дальность, угол азимута и места) относительно ЛА, их радиальные скорости на каждом периоде зондирования РЛС, параметры и положения направления ДН АС РЛС, коэффициент потерь и др. Учет параметров РЛС, таких как текущие значения направления, ширины, ДН АС РЛС, формы суммарных и разностных ДН пеленгатора, позволяет повысить точность имитации характеристик обнаружения и сопровождения РЛС со сканированием пространства по угловым координатам;
ввода параметров имитации - ПФЦО: маршрут летательного аппарата (ЛА), его скорость, курс и высота, ЭПР элементов сцены и цели (целей), координаты элементов сцены (дальность, угол азимута и места) относительно ЛА, их радиальные скорости на каждом периоде зондирования РЛС, параметры и положения направления ДН АС РЛС, коэффициент потерь и др. Учет параметров РЛС, таких как текущие значения направления, ширины, ДН АС РЛС, формы суммарных и разностных ДН пеленгатора, позволяет повысить точность имитации характеристик обнаружения и сопровождения РЛС со сканированием пространства по угловым координатам;
вывода контрольной и диагностической информации для проверки качества работы блоков имитатора; такая информация может содержать все возможные внутренние сигналы, может формироваться в имитаторе и выводиться как при имитации, так и по ее окончании, что позволит обеспечить повышение качества обработки результатов имитации, выявление избыточности или недостаточности описания имитируемых условий (сцены);
ввода управляющих сигналов: смены режима работы имитатора (инициализация, пуск, пауза), выбор сценария имитации (из БД либо передача всех параметров по интерфейсу).
Данные сигналы могут формироваться во внешней системе полунатурного моделирования, обеспечивают синхронность времени моделирования и траекторий движения РЛС относительно сцены (целей).
Предлагаемое устройство имитатора (фиг.2) работает следующим образом. Зондирующий сигнал РЛС, принятый приемной антенной 1, фильтруется, усиливается и переносится входным приемником-преобразователем 3 на промежуточную частоту и оцифровывается. Выходной сигнал приемника-преобразователя 3 задерживается управляемой линией задержки 4 на дискретное время τn, соответствующее расстоянию τmin до ближайшей блестящей точки имитируемой цели (поверхности), сдвигается по частоте в квадратурном умножителе 5 на величину Δϕn, соответствующую средней радиальной скорости сближения РЛС и имитируемой цели и по фазе на величину ϕn для компенсации дискретности при смене времени задержки τn.
Далее в цифровой форме, на промежуточной частоте задержанный сигнал модулируется по амплитуде, длительности и фазе в четырех аналогичных по структуре модуляторах 10-13. Выходы модуляторов формируют путем свертки задержанного сигнала на выходе квадратурного умножителя 5 с соответствующими расчетными импульсными характеристиками сцены HY1, HY2, HZ1, HZ2, сформированными вычислителем параметров имитации 9. Выходные сигналы модуляторов 10-13 через выходные преобразователи 14-17 преобразуют входные оцифрованные сигналы в соответствующие аналоговые сигналы промежуточной частоты и переносят их на несущую частоту с помощью сигнала ВЧ гетеродина 2. Полученные выходными преобразователями 14-17 сигналы излучаются четырьмя передающими антеннами 18-21 в сторону проверяемой РЛС. Приемная антенна 1 имитатора расположена на строительной оси АС РЛС (далее оси 0х) на расстоянии Rtr, от фазового центра антенны РЛС (фиг.3). Передающие антенны имитатора 18-21 расположены вдоль вертикальной оси 0у (антенны 18-19) и вдоль горизонтальной оси 0z (антенны 20-21), симметрично относительно оси 0х в углах ромба на сфере с радиусом RS, центром которой является фазовый центр АС РЛС (см. фиг. 3).
В процессе настройки и работы имитации выставляется и при необходимости корректируется частота ϕг работы ВЧ гетеродина 2. Диапазон частот работы РЛС известен, а выбор достаточно широкополосных устройств входного приемника-преобразователя 3 и выходных преобразователей 14-17 позволяют использовать имитатор для проверки РЛС с различными сигналами - как с узкополосными (импульсные) и широкополосными (ЛЧМ и др. виды модуляции), так и с адаптирующимися (перестраиваемыми по центральной полосе и положению внутри диапазона частот) зондирующими сигналами. Во всех случаях для повышения качества имитации необходимо обеспечить попадание спектра рабочих частот РЛС (который может зависеть, например, от дальности и характеристик цели/фона) в диапазон частот сигналов входного приемника-преобразователя 3. Для решения этой задачи частота ƒг может поступать по интерфейсу ввода-вывода и/или корректироваться с учетом измеряемой ЧМ детектором блока 6 промежуточной частоты ƒnp(t), априорной информации о значении частоты РЛС или способе ее перестройки.
Входной приемник-преобразователь 3 выполняет частотную селекцию принимаемого приемной антенной 1 сигнала и перенос его частоты на промежуточную в соответствии с частотой ƒг ВЧ гетеродина 2.
Кроме того, принятый приемником-преобразователем 3 сигнал, регулируется по амплитуде с помощью сигнала UРУ, формируемого на втором управляющем выходе вычислителя параметров имитации 9 по данным об амплитуде принятого сигнала S(t) на выходе блока оценки параметров сигнала 6. Управляемое усиление входного сигнала исключает ограничение сигнала при приеме и оцифровке. Входной приемник-преобразователь 3 также выполняет оцифровку и дискретизацию по времени принимаемого сигнала. Все указанные операции, включая аналого-цифровое преобразование, выполняются по известным из уровня техники методам, например, в соответствии с прототипом на фиг. 1.
Вычислитель параметров имитации 9 обеспечивает расчет общих параметров имитации сцены. Дискретная задержка τn, соответствующая расстоянию τk_min до ближайшей блестящей точки имитируемой цели (поверхности), определяется вычислителем параметров имитации 9 и вводится в управляемую линию задержки 4 в соответствии с выражениями:



где trunc - функция взятия целой части числа;
n - номер периода обновления параметров имитации;
τk_min - минимальная задержка по всем k-м элементам цели (сцены);
min(rk) - минимальная дальность по всем k-м элементам цели (сцены);
τmin - минимальная имитируемая задержка;
Δτ - шаг выборки принятого имитатором сигнала по задержке;
с - скорость электромагнитной волны;
rmin - минимальная имитируемая дальность элемента сцены;
Rtr - расстояние между антенной РЛС и приемной антенной имитатора (см. фиг. 3);
RS - расстояние между передающей антенной имитатора и антенной исследуемого радиолокатора;
τzd - собственная минимальная задержка аппаратуры имитатора (волноводы, линии связи и преобразования сигнала);
FЦОС - частота выборки принимаемого сигнала во входном приемнике-преобразователе 3, определяющая шаг дискретной задержки сигнала в линии задержки 4, такт формирования цифровых сигналов в блоках 5, 7, 10-13 и цифроаналогового преобразования в выходных преобразователях 14-17.
Значение доплеровского сдвига частоты Δƒn, соответствующего средней радиальной скорости сближения РЛС с имитируемой целью, рассчитывается вычислителем параметров имитации 9 по «основным» (наиболее радиоконтрастным) k-м элементам цели (или по всем k-м элементам сцены):

где νk - текущее значение радиальной скорости k-го «основного» элемента сцены;
median - функция поиска среднего значения в массиве;
λ=c/ƒ0 - длина волны излучения радиолокатора;
ƒ0 - средняя несущая частота зондирующего сигнала РЛС.
При этом средняя несущая частота зондирующего сигнала РЛС априорно известна или может быть оценена с использованием ЧМ детектора:
где ƒпр - значение текущей промежуточной частоты принимаемого сигнала на выходе ЧМ детектора 6. Значение ƒпр(t) для импульсного сигнала оценивается и запоминается в пределах длительности огибающей зондирующего импульса S(t), формируемой AM детектором блока 6;
±ƒг - частота ВЧ гетеродина, использованная для переноса частоты входного сигнала на промежуточную (знак+/ - соответствует виду настройки частоты ƒг ВЧ гетеродина относительно ƒ0).
Значение доплеровского сдвига частоты Δƒn, с четвертого выхода вычислителя параметров имитации 9 поступает в квадратурный гетеродин 7.
Значение сдвига фазы ϕn необходимо для исключения скачка фазы и выполняется строго в моменты дискретного изменения задержки τn. Значение сдвига фазы ϕn рассчитывается вычислителем параметров имитации 9:

где n - номер периода обновления параметров имитации, а индекс n-1 соответствует значению параметра в предыдущем периоде;
ƒпр(t-τn) - значение промежуточной частоты принимаемого сигнала ƒпр(t) на выходе ЧМ детектора 6, в момент времени (t - τn).
Значение ƒпр(t) для импульсного сигнала оценивается и запоминается в пределах длительности огибающей зондирующего импульса S(t), формируемой AM детектором блока 6. Для повышения точности работы с модулированными сигналами используется значение промежуточной частоты ƒпр(t-τn), которое точно соответствует текущей частоте сигнала на выходе управляемой линии задержки 4, подключенной к первому входу квадратурного умножителя 5. Наличие дополнительного времени τn позволяет реализовать более точные методы оценки мгновенных значений ƒпр(t) (например, усреднение или линеаризация значений) по априорным данным о модуляции сигнала РЛС.
Скачок ϕn синхронизируется с моментом смены задержки τn, но нет необходимости синхронизации с периодом повторения зондирующих сигналов и интервалом когерентного накопления. Периодические скачки фазы ϕn=2πƒпрΔτn не разрушают когерентность имитируемых сигналов, т.к. в выходном сигнале эти скачки будут отсутствовать (см. пример моделирования на фиг 6). По этой же причине эти действия не изменят доплеровскую частоту и не приведут к сдвигу доплеровской фазы. Изменение Δƒn меняет доплеровскую частоту, но не меняет текущую фазу квадратурного гетеродина. Фаза доплеровского ЛЧМ сигнала от блестящей точки на текущей задержке учитывается импульсной характеристикой сцены в текущем периоде повторения. При этом приращение доплеровской фазы сигнала от блестящей точки за период повторения ТП на несущей частоте, пропорционально доплеровской частоте ƒДk и составляет 2πƒДkTП.
Графики примера процесса коррекции скачка по фазе на промежуточной частоте при дискретном изменении дальности подвижной цели, подтверждающие корректность имитации в предложенной схеме, в том числе для импульсов с внутриимпульсной модуляцией приведены на фиг. 6: значения несущих частот 4200-4400 МГц, частота гетеродина smix=-3300 МГц, доплеровская частота sdop=410 МГц показана с двумя скачками фазы, возникшими в моменты смены задержки, которые необходимы при перемещении импульсных характеристик на дискретную величину по дальности.
Значение сдвига фазы ϕn с пятого выхода вычислителя параметров имитации 9 поступает в квадратурный гетеродин 7, формирующий цифровой квадратурный сигнал, подаваемый на второй вход квадратурного умножителя 5.
Вычислитель параметров имитации 9 также обеспечивает расчет параметров имитации радиолокационных целей. Для этого может использоваться база данных БД сценариев имитации 8, из которой для предварительно выбранной фоно-целевой обстановки, ракурсов и траекторий движения целей и носителя РЛС на первый вход вычислителя 9 поступают параметры элементов сцены по rk - дальности, βk - азимуту, εk - углу места, νk - радиальной скорости и σk - эффективной площади рассеяния.
Элементы сцены - точки k могут быть расположены в узлах трехмерной сетки с размерами по угловым координатам и дальности меньшими или равными половинному разрешению РЛС в соответствующих направлениях. С учетом изменения взаимного положения цели и ЛА значения (rk, βk, εk, νk, σk) являются функциями времени, значения которых могут быть заранее размещены в базе данных (например, по результатам математического моделирования траектории и сцены без использования режима реального времени) либо в базе данных могут быть расположены начальные значения параметров, а значения могут рассчитываться вычислителем параметров имитации в режиме реального времени с учетом текущих данных о высоте, курсе, скорости ЛА, направлении ДН АС РЛС. Выбор сценария имитации из БД либо передача всех необходимых параметров из внешней системы полунатурного моделирования по интерфейсу ввода-вывода определяется соответствующим сигналом интерфейса ввода-вывода. Указанные способы формирования сигналов вычислителем известны из уровня техники и могут быть реализованы в предлагаемом изобретении в зависимости от удобства эксплуатации, быстродействия вычислителя и интерфейса ввода-вывода.
Набор точек сцены ограничен областью имитируемых дальностей и углов:

где rmax - максимальная (достаточная для имитации) дальность работы РЛС,
ΔβИ, ΔεИ - половина ширина эффективной диаграммы направленности АС РЛС по половинной мощности в соответствующих плоскостях работы РЛС и имитатора.
Пары передающих антенн 20-21 в горизонтальной плоскости и 18-19 в вертикальной плоскости (фиг. 3 и фиг. 4) установлены по краям пятна половинной мощности излучения-приема сигнала проверяемой РЛС (сечения главного луча суммарной диаграммы направленности антенны РЛС в области сферы размещения антенн имитатора). Угловой разнос передающих антенн имитатора 2ΔβИ и 2ΔεИ в точке расположения антенны проверяемой РЛС рассматривается в горизонтальной плоскости x0z и вертикальной х0у, соответственно.
Для моделирования радиолокационных сигналов сцены используют сумму сигналов, отраженных элементами сцены, размер которых в радиальном и поперечном направлении менее или равен половине разрешения проверяемой РЛС, и попадающих в диаграмму направленности АС РЛС. Для каждого k-го элемента сцены поступают (из БД или по интерфейсу ввода-вывода) текущие во времени имитируемые параметры: (rk, βk, εk, νk, σk) - дальность, угол азимута, угол места, радиальная скорость и эффективная площадь рассеяния соответственно. В вычислителе параметров имитации 9 они пересчитываются в задержки (общую τn и для каждой точки τk), доплеровские сдвиги частот (для каждой точки Δƒk и средний Δƒn) и значения ak, соответствующие амплитуде сигнала, отраженного k-тым элементом сцены на входе антенны РЛС.
Текущие параметры (τk Δƒk, ak) k-го элемента сцены определяет вычислитель параметров имитации 9 по известным в теории радиолокации зависимостям, с учетом их изменения во времени:


где rk - текущее имитируемое расстояние между антенной РЛС и k-м элементом сцены;
Δƒk - доплеровский сдвиг сигнала, отраженного k-м элементом сцены за вычетом вычисленного ранее среднего доплеровского смещения Δƒn;
νk - радиальная скорость k-го элемента сцены в текущем периоде обновления параметров имитации;
Kp - коэффициент учета ослабления по мощности при приеме и преобразовании сигнала в имитаторе;
Gt(βk-βA, εk-εA) - коэффициент усиления антенны РЛС на передачу с учетом направления на k-й элемент сцены в текущий момент времени;
βA, εA - текущие значения углов отклонения АС РЛС (равносигнального направления АС РЛС) от центрального направления на приемную антенну 1 имитатора в соответствующих плоскостях;
Gr(βk-βA, εk-εA) - коэффициент усиления антенны РЛС на прием с учетом направления на k-й элемент сцены в текущий момент времени;
L - коэффициент потерь при распространении сигнала в воздухе на несущей частоте.
Таким образом, доплеровский спектр элементов сцены формируется в квадратурном умножителе 5 (задается среднее значение Δƒn) и модуляторах 10-13 (задаются индивидуальные доплеровские смещения частот Δƒk элементов сцены относительно среднего значения Δƒn). Общее медианное значение сдвига частоты Δƒn обеспечивает перенос спектра индивидуальных доплеровских частот Δƒk к нулевым значениям, что позволяет существенно снизить частоту пересчета импульсных характеристик HY1, HY2, HZ1, HZ2 и/или повысить качество имитации доплеровских спектров всех точек сцены.
Для имитации отраженного сигнала сцены вычислитель параметров имитации 9 рассчитывает импульсные характеристики HY1, HY2, HZ1, HZ2 сцены в имитируемом диапазоне задержек от τn до max(2rk/c). Параметром импульсных характеристик является i-индекс задержки сигнала, отраженного k-м элементом сцены (i≥1):
Значения импульсных характеристик на каждом периоде обновления параметров имитации сигнала определяются выражениями:




где  - веса уровней мощности сигналов, излучаемых антеннами Yl, Y2, Z1 и Z2, определяющих имитируемое угловое положение k-го элемента сцены на каждом периоде обновления параметров имитации;
- веса уровней мощности сигналов, излучаемых антеннами Yl, Y2, Z1 и Z2, определяющих имитируемое угловое положение k-го элемента сцены на каждом периоде обновления параметров имитации;
Δψk - начальный сдвиг фазы имитируемого сигнала от k-го элемента сцены относительно зондирующего сигнала РЛС на интервале измерения, является случайным в диапазоне ±π.
Для двумерного случая необходимо учитывать перераспределение мощностей излучения четырех передающих антенн на сфере фиг. 4. Каждой передающей антенне Y1, Y2, Z1, Z2 сопоставляют некоторую эквивалентную зону (связанную с угловыми координатами k-го элемента сцены), площадь которой пропорциональна мощности излучения передающей антенны, противолежащей ей на той же оси. Геометрия эквивалентных зон для расчетов весов  приведена на фиг. 4.
приведена на фиг. 4.
В расчетах используют угловые координаты передающих антенн и имитируемых элементов сцены относительно осей антенной системы РЛС:

Значение весов  определяют через расчет площадей соответствующих зон SY1, SY2, SZ1 и SZ2, учет суммарной и разностной ДН антенн и нормировки по выражениям:
определяют через расчет площадей соответствующих зон SY1, SY2, SZ1 и SZ2, учет суммарной и разностной ДН антенн и нормировки по выражениям:
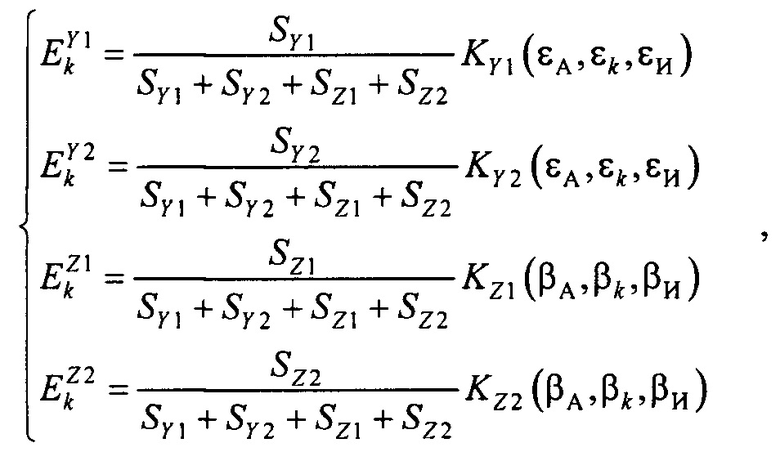
где βA, εA - углы между равносигнальным направлением АС РЛС и направлением на центр антенной системы имитатора;
βk, εk - углы между направлением на k-й элемент и направлением на центр антенной системы имитатора;
βИ, εИ - углы между направлением на передающую антенну имитатора и направлением на центр антенной системы имитатора относительно горизонтальной x0z и вертикальной х0у плоскостей, соответственно;
KY1, KY2, KZ1 и KZ2 - коэффициенты учета ДН пеленгатора.
Коэффициенты учета ДН пеленгатора (выражения и обозначения соответствуют фиг. 5 и пат. РФ 2391682 для случая использования двух антенн в одной плоскости при отсчете углов от направления на центр АС имитатора, при нулевом значении угла смещения пары βИi=0 антенн




где θY∑, θYΔ, θZ∑, θZΔ - суммарные и разностные ДН антенн пеленгатора, в общем случае различающиеся в горизонтальной x0z и вертикальной х0у плоскостях, соответственно.
В значения параметров имитации также могут быть внесены дополнительные искажения, например, флуктуации частоты и амплитуды, которые можно использовать для имитации флуктуаций ЭПР и шумов координат (Островитянинов Р.В., Басалов Ф.А. Статистическая теория радиолокации протяженных целей. М.: Радио и связь, 1988). Возможно сокращение числа имитируемых элементов сцены путем отбрасывания элементов сцены с низкой ЭПР, отстоящих далеко по положению/частоте от основной цели, объединения некоторых близких по параметрам точек (патент РФ 2386143 и др.). Для этого на вход имитатора по интерфейсу ввода-вывода могут поступать дополнительные данные определения параметров имитируемой сцены.
ВЧ гетеродин 2 может быть построен на базе синтезатора частоты с петлей фазовой автоподстройки частоты (Рыжков А.В., Попов В.Н. Синтезаторы частот в технике радиосвязи. М.: Радио и связь, 1991, с. 66). Кратные тактовые частоты для аналого-цифрового (АЦП) и цифроаналогового (ЦАП) преобразователей и других блоков ЦОС имитатора могут быть получены с использованием делителей частоты ВЧ гетеродина.
Входной приемник-преобразователь 3 может быть построен по одной из типовых схем, например, как линейный тракт супергетеродинного приемника, включающий преселектор, квадратурный демодулятор (смеситель), регулируемый усилитель, полосовой фильтр, АЦП. Выходной преобразователь может содержать ЦАП, квадратурный модулятор (смеситель), полосовой фильтр, усилитель мощности, в том числе с регулировкой мощности (при необходимости).
Модуляторы 10-13 выполняют свертку расчетной импульсной характеристики сцены с задержанной копией зондирующего сигнала и могут быть реализованы во временной области (в виде фильтров с конечной импульсной характеристикой) либо в частотной области (с использованием прямого и обратного преобразований Фурье). При этом модуляторы, подобно прототипу (см. фиг. 1), для фиксации коэффициентов импульсных характеристик могут содержать ОЗУ коэффициентов фильтра.
Квадратурный гетеродин 7 может быть построен на основе схемы прямого цифрового синтеза квадратурных составляющих гармонического сигнала, при этом начальная фаза ϕn и частота Δƒn сигнала квадратурного гетеродина 7 задаются управляющими сигналами от вычислителя параметров имитации 9.
Блок AM и ЧМ детекторов 6 служит для получения огибающей зондирующего сигнала S(t) и закона изменения частоты внутриимпульсной модуляции на промежуточной частоте ƒпр(t) по которым вычислитель параметров модуляции 9 определяет амплитуду, несущую частоту/длину волны, начало и конец зондирующего импульса РЛС. По огибающей амплитуды зондирующего сигнала РЛС S(t) вычислитель параметров имитации определяет требуемый сигнал управления UРУ усилением входного приемника преобразователя 3, обеспечивающего его работу в линейном режиме. Анализ изменений сигналов ƒпр(t) и S(t) позволяет реализовать в вычислителе 9 определение начала и конца периода модуляции или зондирующего импульса. Данная информация используется для синхронизации моментов обновления параметров имитации (выходы 1-9) с периодом модуляции/излучения зондирующего сигнала РЛС.
Блок AM и ЧМ детекторов 6 содержит детекторы амплитуды и частоты, реализуемые известными методами обработки аналоговых или цифровых сигналов (например, с применением ПЛИС: М. Savage, J.Е. Henry, J.J. Becker, and D.B. Wilson, «Wideband low latency repeater and methods», WO/2013/184232 Al, (US) 2012).
Линия задержки 4 может быть реализована, подобно прототипу или одному из рассмотренных аналогов, в том числе по известным в уровне техники методам формирования дискретной задержки по технологии цифровой сигнальной/радиочастотной памяти на базе многопортовой ОЗУ, например, на системе на кристалле 1879BM3(DSM). Все операции ЦОС, включая блоки квадратурного гетеродина, детектирования, квадратурного умножения, управляемой линии задержки могут быть также реализованы на основе устройств радиочастотной памяти (Егоров Н., Кочемасов В. Технология цифровой радиочастотной памяти. Электроника, №10, 2016. С. 62-71).
Вычислитель параметров имитации 9 может быть реализован на процессоре в составе системы на кристалле XC7Z045 или на другой ЭВМ с возможностью вычислений и управления блоками ЦОС в режиме реального времени. С помощью соответствующих команд, выполняемых в циклическом режиме программным обеспечением вычислителя 9, осуществляется динамическое изменение параметров имитируемых сигналов от элементов сцены и формирование соответствующих сигналов управления программируемых интегральных схем (ПЛИС).
База данных БД сценариев имитации 8 может быть реализована в составе вычислительной платформы или внешнем ПЗУ или ОЗУ (возможности и способы записи/перезаписи информации известны из уровня техники цифровых вычислителей).
Остальные элементы широко используются в технике приема, формирования и преобразования СВЧ и цифровых сигналов и не требуют пояснений по реализации. Дополнительные усилители, вентили, смесители, аттенюаторы для согласования уровней и рабочей полосы частот не показаны, но могут быть использованы и рассчитаны, например, в соответствии с RU2412449 («Имитатор радиолокационной цели». Дата приоритета: 26.12.2008).
Для повышения точности расстояния Rtr и RS должны быть выбраны с учетом выполнения условия работы всех антенн в дальней зоне.
При использовании описанного имитатора на интервале наблюдения когерентной моноимпульсной РЛС обеспечивается:
- имитация когерентного эхосигнала, представляющего совокупность сигналов, отраженных пространственно-разнесенными элементами земной поверхности и целью, дальность до которых и доплеровская частота непрерывно изменяются,
- имитация углового положения каждого разрешаемого элемента сцены в двух плоскостях в пределах ДН антенной системы РЛС,
- имитация сигналов сцены при произвольной несущей частоте и модуляции зондирующего сигнала РЛС без дополнительных связей с проверяемой РЛС.
Широкие возможности имитатора по имитации эхосигналов сцены и целей позволяют проверять сценарии работы РЛС разного типа и назначения, в том числе радиовысотомеры.
Изобретение может быть использовано для имитации эхосигналов, отраженных от подвижных и стационарных целей на фоне подстилающей поверхности в составе стендов полунатурного и имитационного моделирования для исследования процессов обнаружения и сопровождения целей при взаимном перемещении целей и РЛС, включая моноимпульсные когерентные РЛС.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИМИТАТОР РАДИОЛОКАЦИОННОЙ ЦЕЛИ ПРИ ЗОНДИРОВАНИИ ПРЕИМУЩЕСТВЕННО ДЛИТЕЛЬНЫМИ СИГНАЛАМИ | 2014 |
|
RU2568899C2 |
| ИМИТАТОР СИГНАЛА РАДИОЛОКАТОРА С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ | 2012 |
|
RU2522502C1 |
| ИМИТАТОР РАДИОЛОКАЦИОННОЙ ЦЕЛИ | 2018 |
|
RU2676469C1 |
| СПОСОБ И УСТРОЙСТВО ИМИТАЦИИ РАДИОЛОКАЦИОННОГО СИГНАЛА МОНОИМПУЛЬСНОЙ РЛС | 2008 |
|
RU2391682C1 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ ЛОЖНОЙ РАДИОЛОКАЦИОННОЙ ЦЕЛИ ПРИ ЗОНДИРОВАНИИ СИГНАЛАМИ С ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2016 |
|
RU2625567C1 |
| ИМИТАТОР РАДИОЛОКАЦИОННОЙ ЦЕЛИ ПРИ ЗОНДИРОВАНИИ ПРЕИМУЩЕСТВЕННО ДЛИТЕЛЬНЫМИ СИГНАЛАМИ | 2011 |
|
RU2504799C2 |
| ИМИТАТОР ЛОЖНОЙ РАДИОЛОКАЦИОННОЙ ЦЕЛИ ПРИ ЗОНДИРОВАНИИ СИГНАЛАМИ С ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2011 |
|
RU2486540C1 |
| ИМИТАТОР РАДИОЛОКАЦИОННОГО СИГНАЛА СЦЕНЫ | 2014 |
|
RU2549884C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ СИГНАЛА, ОТРАЖЕННОГО ОТ ЗЕМНОЙ ПОВЕРХНОСТИ, В РЕЖИМЕ КАРТОГРАФИРОВАНИЯ РЕАЛЬНЫМ ЛУЧОМ | 2013 |
|
RU2530544C1 |
| ИМИТАТОР РАДИОЛОКАЦИОННОЙ ЦЕЛИ | 2008 |
|
RU2412449C2 |
Изобретение относится к области радиолокации, а именно к устройствам, предназначенным для имитации пространственной и частотно-временной структуры радиолокационных сигналов, содержащих комбинацию отражений от одной или нескольких целей, а также сигналов, отраженных от подстилающей поверхности. Техническим результатом является имитация сигнала сцены для моноимпульсных когерентных РЛС, обеспечивающая как имитацию эхосигналов в координатах «дальность-доплеровская частота», так и углового положения разрешаемых элементов сцены в двух плоскостях при произвольном виде модуляции зондирующего сигнала радиолокатора. В заявленный имитатор введены приемная антенна и четыре передающих антенны с крестообразным размещением их пар, две в горизонтальной плоскости и две в вертикальной плоскости, и дополнительные три параллельные каналы формирования излучаемых сигналов. Каждая передающая антенна запитана выходом соответствующего канала формирования излучаемого сигнала. Передающие антенны установлены на равных расстояниях от фазового центра приемной антенны исследуемого радиолокатора, а в моделируемых горизонтальной и вертикальной плоскостях - на расстояниях, соответствующих размерам пятна облучения, определяемого эффективной шириной диаграммы направленности антенны исследуемого радиолокатора. Пары передающих антенн расположены в вертикальной и горизонтальной плоскости. Параметры сигналов, формируемых в четырех параллельных каналах и излучаемых четырьмя антеннами сигналов, динамически перестраиваются путем свертки наблюдаемой модуляции зондирующего сигнала с расчетными импульсными характеристиками сцены в дискретных положениях радиолокатора, разнесенных по времени периодом повторения зондирующих импульсов радиолокатора. 6 ил.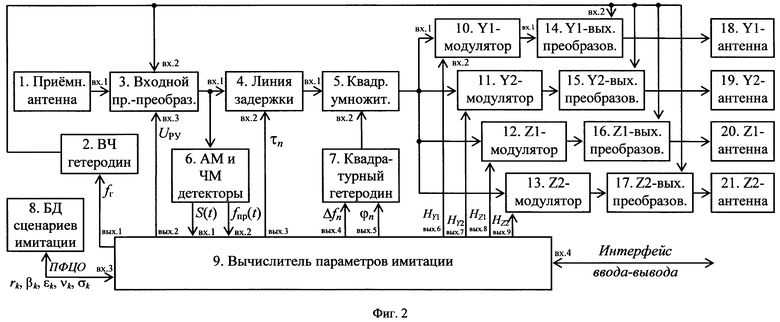
Имитатор радиолокационных целей, содержащий последовательно соединенные высокочастотный гетеродин, входной приемник-преобразователь, управляемую линию задержки, квадратурный умножитель, модулятор и выходной преобразователь, блок амплитудного и частотного детектора, вход которого соединен с выходом входного приемника-преобразователя, а выходные сигналы амплитуды и частоты детектируемого сигнала соединены с первым и вторым входом вычислителя параметров имитации, вычислитель параметров имитации, первый выход которого соединен с входом высокочастотного гетеродина для управления его частотой настройки, второй выход вычислителя параметров имитации соединен с третьим входом входного приемника-преобразователя для управления усилением, четвертый и пятый выходы вычислителя параметров имитации соединены с управляющими входами квадратурного гетеродина по частоте и фазе, выход которого соединен со вторым сигнальным входом квадратурного умножителя, третий выход вычислителя параметров имитации с информацией о требуемой величине задержки соединен со вторым входом управляемой линии задержки, шестой выход вычислителя параметров модуляции соединен со вторым управляющим входом модулятора, выход высокочастотного гетеродина соединен со вторым входом выходного преобразователя, отличающийся тем, что вводятся приемная антенна, база данных сценариев имитации, три модулятора, три выходных преобразователя и четыре передающих антенны, расположенные симметрично относительно плоскостей y0x и z0x антенной системы проверяемого радиолокатора с равными расстояниями до фазового центра антенной системы проверяемого радиолокатора и с угловым разносом от оси 0х в плоскостях у0х и z0x антенной системы проверяемого радиолокатора, равным половине ширины эффективной диаграммы направленности антенной системы проверяемого радиолокатора в вертикальной и горизонтальной плоскостях, соответственно, со следующими соединениями: выход приемной антенны соединен с сигнальным входом входного приемника-преобразователя, выход квадратурного умножителя соединен с сигнальными входами трех введенных модуляторов, выход каждого введенного модулятора соединен с сигнальным входом соответствующего введенного выходного преобразователя, выходы каждого из четырех выходных преобразователей соединены с соответствующими входами четырех передающих антенн, выход высокочастотного гетеродина соединен со вторыми входами трех введенных выходных преобразователей, вход-выход базы данных сценариев имитации соединен с третьим входом-выходом вычислителя параметров имитации, седьмой, восьмой и девятый выходы вычислителя параметров имитации, передающие информацию о параметрах модуляции, соединены со вторыми управляющими входами трех введенных модуляторов, при этом вычислитель параметров имитации имеет интерфейс ввода-вывода для передачи дополнительных параметров, контрольных и управляющих сигналов.
| ПИЛЬНОЕ УСТРОЙСТВО к МАШИНЕ ДЛЯ ПОВАЛА И ТРЕЛЕВКИ ДЕРЕВЬЕВ | 0 |
|
SU189247A1 |
| ИМИТАТОР РАДИОЛОКАЦИОННОЙ ЦЕЛИ | 2018 |
|
RU2676469C1 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ ЛОЖНОЙ РАДИОЛОКАЦИОННОЙ ЦЕЛИ ПРИ ЗОНДИРОВАНИИ СИГНАЛАМИ С ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2016 |
|
RU2625567C1 |
| ИМИТАТОР ЛОЖНОЙ РАДИОЛОКАЦИОННОЙ ЦЕЛИ ПРИ ЗОНДИРОВАНИИ СИГНАЛАМИ С ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2011 |
|
RU2486540C1 |
| РАДИОЛОКАЦИОННЫЙ ИМИТАТОР ЦЕЛИ | 2004 |
|
RU2267798C1 |
| ИМИТАТОР ИСТОЧНИКОВ РАДИОСИГНАЛОВ | 1994 |
|
RU2094815C1 |
| EP 3783383 A1, 24.02.2021 | |||
| US 2017363719 A1, 21.12.2017 | |||
| US 6067041 A, 23.05.2000 | |||
| DE 102015121297 A1, 09.03.2017. | |||

