Область техники, к которой относится изобретение
[0001] Настоящее раскрытие сущности, в общем, относится к системам и способам для обнаружения перемещения пользователя в ходе использования устройства для ухода за полостью рта и предоставления обратной связи пользователю, когда перемещение пользователя достигает или превышает пороговое значение.
Уровень техники
[0002] Известны различные традиционные формы отслеживания местоположения устройства для ухода за полостью рта во рту пользователя. Отслеживание местоположения устройства для ухода за полостью рта предоставляет возможность эффективной обратной связи пользователю относительно практического применения для гигиены полости рта пользователя. Например, если местоположение головки щетки отслеживается во рту пользователя, участки группы зубов, конкретная секция зуба или десны, еще не очищенная, могут идентифицироваться таким образом, что пользователь может сфокусироваться на этих областях. Дополнительно, надлежащая обратная связь относительно техники пользователя, например, слишком жесткая, слишком мягкая или недостаточно долгая чистка в конкретной секции рта, может предоставляться на основе реализации этой традиционной технологии.
[0003] Тем не менее, традиционная технология отслеживания и обратной связи не отслеживает местоположение и перемещение пользователя, в том числе местоположение и перемещение головы пользователя, относительно и/или отдельно и помимо местоположения устройства для ухода за полостью рта во рту пользователя. Фактически, традиционная технология основана на определенных допущениях, например, что голова пользователя является прямой, горизонтальной и стационарной. Эти ограничения традиционной технологии могут приводить к неточной или не совсем идеальной обратной связи и инструкциям/предложениям из традиционной технологии пользователю. Соблюдение требований такой обратной связи пользователем может приводить к не совсем предпочтительным результатам гигиены полости рта.
[0004] Соответственно, в данной области техники существует потребность в системах и способах для обнаружения перемещения пользователя в ходе использования устройства для ухода за полостью рта и предоставления полезной обратной связи, чтобы улучшать соблюдение требований пользователем и улучшать поведение при чистке и/или гигиену полости рта пользователя.
Сущность изобретения
[0005] Настоящее раскрытие сущности направлено на изобретаемые системы и способы для обнаружения перемещения пользователя в ходе использования устройства для ухода за полостью рта и предоставления обратной связи пользователю, когда перемещение пользователя достигает или превышает пороговое значение. Различные варианты осуществления и реализации в данном документе направлены на систему, которая включает в себя датчик соблюдения требований по местоположению, позиции и/или перемещению, который может конфигурироваться или программироваться с возможностью обнаруживать перемещение пользователя в ходе использования устройства для ухода за полостью рта. Датчик может соединяться (в беспроводном режиме или не в беспроводном режиме) с контроллером, включающим в себя процессор и энергонезависимый носитель хранения данных для сохранения программного кода, который может программироваться с возможностью осуществлять проверку соблюдения требований посредством сравнения считываемой величины (количества или качества) перемещения с пороговым значением/величиной (количеством или качеством) перемещения и определять то, достигает или превышает либо нет считываемая величина перемещения пороговое значение/величину. Контроллер дополнительно может программироваться с возможностью уведомлять пользователя в случае, если перемещение пользователя достигает или превышает пороговое значение/величину, посредством изменения/модификации пользовательского интерфейса (который может располагаться на или может быть отдельным от устройства для ухода за полостью рта, в том числе, например, на любом вычислительном устройстве или интеллектуальном зеркале) относительно нормального состояния или иного предоставления конкретного визуального индикатора пользователю. Альтернативно, индикатор может быть звуковым или вибрационным.
[0006] В некоторых вариантах осуществления, датчик может располагаться за пределами устройства для ухода за полостью рта и встраиваться в цифровой носитель. Например, такой датчик может встраиваться или функционально соединяться иным способом с мобильным или другим вычислительным устройством, включающим в себя процессор и энергонезависимый носитель хранения данных для сохранения программного кода, таким как смартфон или планшетный компьютер (как должны принимать во внимание и понимать специалисты в данной области техники в связи с прочтением этого раскрытия сущности). Дополнительно, такой датчик может включать в себя цифровую камеру либо двумерный, трехмерный, видео-, IR-, UV- или другой датчик изображений (как должны принимать во внимание и понимать специалисты в данной области техники в связи с прочтением этого раскрытия сущности), сконфигурированный и/или запрограммированный с возможностью обнаруживать или иным образом захватывать перемещение пользователя. Согласно другому варианту осуществления, датчик может встраиваться в устройство для ухода за полостью рта. Такой датчик может включать в себя акселерометр, гироскоп, GPS или другой датчик местоположения, позиционирования и/или перемещения (как должны принимать во внимание и понимать специалисты в данной области техники в связи с прочтением этого раскрытия сущности).
[0007] Обычно, в одном аспекте, способ для уменьшения отвлечения внимания пользователя устройства для ухода за полостью рта включает в себя этапы: обнаружение перемещения пользователя в ходе использования устройства для ухода за полостью рта; определение того, достигает или превышает либо нет величина перемещения пороговое значение для уведомления пользователя относительно перемещения; и в случае, если перемещение достигает или превышает пороговое значение, уведомление пользователя относительно перемещения посредством изменения пользовательского интерфейса относительно нормального состояния.
[0008] Согласно варианту осуществления, этап обнаружения перемещения пользователя включает в себя захват двумерных или трехмерных изображений.
[0009] Согласно варианту осуществления, этап обнаружения перемещения пользователя включает в себя использование акселерометра или гироскопа, позиционированного в устройстве для ухода за полостью рта.
[0010] Согласно варианту осуществления, этап обнаружения перемещения пользователя включает в себя захват изображений пользователя с использованием камеры.
[0011] Согласно варианту осуществления, этап определения того, достигает или превышает либо нет величина перемещения пороговое значение, включает в себя извлечение наборов видеопризнаков, включающих в себя позиции частей лица пользователя, из захваченных изображений, вычисление разностей между наборами видеопризнаков и сравнение разностей с предварительно заданными значениями.
[0012] Согласно варианту осуществления, этап определения того, достигает или превышает либо нет величина перемещения пороговое значение, включает в себя извлечение наборов линейных или нелинейных признаков из захваченных данных датчиков, вычисление разностей между наборами линейных или нелинейных признаков и сравнение разностей с предварительно заданными значениями.
[0013] Согласно варианту осуществления, этап определения того, достигает или превышает либо нет величина перемещения пороговое значение, включает в себя вычисление взвешенного расстояния между разностями и соответствующими предварительно заданными значениями.
[0014] Согласно варианту осуществления, разности между наборами видеопризнаков представляют собой расстояния между позициями частей лица пользователя для каждого изображения, и соответствующие предварительно заданные значения представляют собой приемлемые расстояния перемещения для каждой части лица.
[0015] Согласно варианту осуществления, пользовательский интерфейс включает в себя видеоизображение, при этом изменение пользовательского интерфейса относительно нормального состояния включает в себя размытие изображения.
[0016] Согласно другому аспекту, система для уменьшения отвлечения внимания пользователя устройства для ухода за полостью рта включает в себя: датчик позиции, выполненный с возможностью определять позиции пользователя в ходе использования устройства для ухода за полостью рта; процессор, поддерживающий связь с датчиком позиции и выполненный с возможностью вычислять разности между определенными позициями и определять то, достигают или превышают либо нет разности пороговое значение для уведомления пользователя; и пользовательский интерфейс, поддерживающий связь с процессором и выполненный с возможностью изменяться относительно нормального состояния в случае, если разности между определенными позициями достигают или превышают пороговое значение для уведомления пользователя.
[0017] Согласно варианту осуществления, датчик позиции включает в себя камеру для того, чтобы захватывать изображения пользователя.
[0018] Согласно варианту осуществления, процессор выполнен с возможностью извлекать наборы видеопризнаков, включающих в себя позиции частей лица пользователя, из захваченных изображений, вычислять разности между наборами видеопризнаков и сравнивать разности с предварительно заданными значениями.
[0019] Согласно варианту осуществления, процессор выполнен с возможностью извлекать наборы линейных или нелинейных признаков из захваченных данных датчиков, вычислять разности между наборами линейных или нелинейных признаков и сравнивать разности с предварительно заданными значениями.
[0020] Согласно варианту осуществления, датчик позиции представляет собой акселерометр или гироскоп, позиционированный в устройстве для ухода за полостью рта.
[0021] Согласно варианту осуществления, процессор выполнен с возможностью вычислять взвешенное расстояние между разностями и соответствующими предварительно заданными значениями.
[0022] Согласно варианту осуществления, разности между наборами видеопризнаков представляют собой расстояния между позициями частей лица пользователя для каждого изображения, при этом соответствующие предварительно заданные значения представляют собой приемлемые расстояния перемещения для каждой части лица.
[0023] Согласно варианту осуществления, пользовательский интерфейс включает в себя видеоизображение, при этом процессор выполнен с возможностью размывать изображение в случае, если разности между определенными позициями превышают пороговое значение.
[0024] При использовании в данном документе в целях настоящего раскрытия сущности, термин "контроллер" используется, в общем, для того, чтобы описывать различные устройства, связанные с работой устройства, системы или способа на основе потокового зонда. Контроллер может реализовываться множеством способов (например, c помощью специализированных аппаратных средств) для того, чтобы выполнять различные функции, поясненные в данном документе. "Процессор" представляет собой один пример контроллера, который использует один или более микропроцессоров, которые могут программироваться с использованием программного обеспечения (например, микрокода), с тем чтобы выполнять различные функции, поясненные в данном документе. Контроллер может реализовываться с применением или без применения процессора, а также может реализовываться как комбинация специализированных аппаратных средств, с тем чтобы выполнять некоторые функции, и процессора (например, одного или более программируемых микропроцессоров и ассоциированных схем), с тем чтобы выполнять другие функции. Примеры компонентов контроллера, которые могут использоваться в различных вариантах осуществления настоящего раскрытия сущности, включают в себя, но не только, традиционные микропроцессоры, специализированные интегральные схемы (ASIC) и программируемые пользователем вентильные матрицы (FPGA).
[0025] В различных реализациях, процессор или контроллер может быть ассоциирован с одним или более носителей хранения данных (обобщенно называются в данном документе "запоминающим устройством", например, энергозависимым и энергонезависимым компьютерным запоминающим устройством). В некоторых реализациях, носители хранения данных могут кодироваться с помощью одной или более программ, которые, при выполнении на одном или более процессоров и/или контроллеров, осуществляют, по меньшей мере, некоторые из функций, поясненных в данном документе. Различные носители хранения данных могут быть стационарными в процессоре или контроллере или могут быть переносимыми, так что одна или более программ, сохраненных на них, могут быть загружены в процессор или контроллер, чтобы реализовывать различные аспекты настоящего раскрытия сущности, поясненные в данном документе. Термины "программа" или "компьютерная программа" используются в данном документе в общем смысле, чтобы означать любой тип машинного кода (например, программного обеспечения или микрокода), который может использоваться для того, чтобы программировать один или более процессоров или контроллеров.
[0026] Термин "пользовательский интерфейс" при использовании в данном документе означает интерфейс между пользователем-человеком или оператором и одним или более устройств, который обеспечивает связь между пользователем и устройством(ами). Примеры пользовательских интерфейсов, которые могут использоваться в различных реализациях настоящего раскрытия сущности, включают в себя, но не только, переключатели, потенциометры, кнопки, наборные диски, ползунки, шаровые манипуляторы, экраны отображения, различные типы графических пользовательских интерфейсов (GUI), сенсорные экраны, микрофоны и другие типы датчиков, которые могут принимать некоторую форму формированного человеком управляющего воздействия и формировать сигнал в ответ.
[0027] Следует принимать во внимание, что все комбинации вышеприведенных принципов и дополнительных принципов, подробнее поясненных ниже (если такие принципы не являются взаимно несогласованными), считаются частью изобретаемого предмета изобретения, раскрытого в данном документе. В частности, все комбинации заявленного предмета изобретения, указанного в конце этого раскрытия сущности, считаются частью изобретаемого предмета изобретения, раскрытого в данном документе.
[0028] Эти и другие аспекты изобретения должны становиться очевидными и истолковываться со ссылкой на вариант(ы) осуществления, описанные ниже в данном документе.
Краткое описание чертежей
[0029] На чертежах, аналогичные ссылки с номером, в общем, ссылаются на идентичные части в различных представлениях. Кроме того, чертежи необязательно начерчены в масштабе, вместо этого акцент делается на понятности иллюстрирования принципов изобретения.
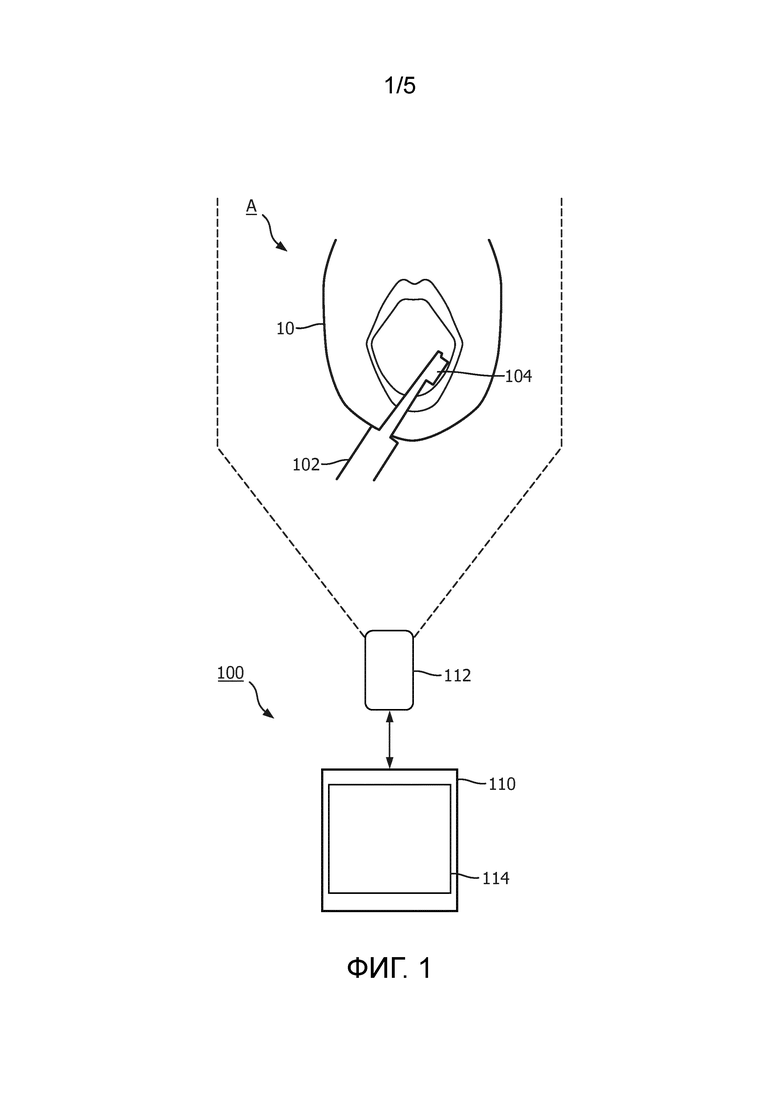
[0030] Фиг. 1 является схематичным представлением системы для обнаружения перемещения пользователя в ходе использования устройства для ухода за полостью рта и предоставления обратной связи пользователю, когда перемещение пользователя достигает или превышает пороговое значение согласно варианту осуществления.
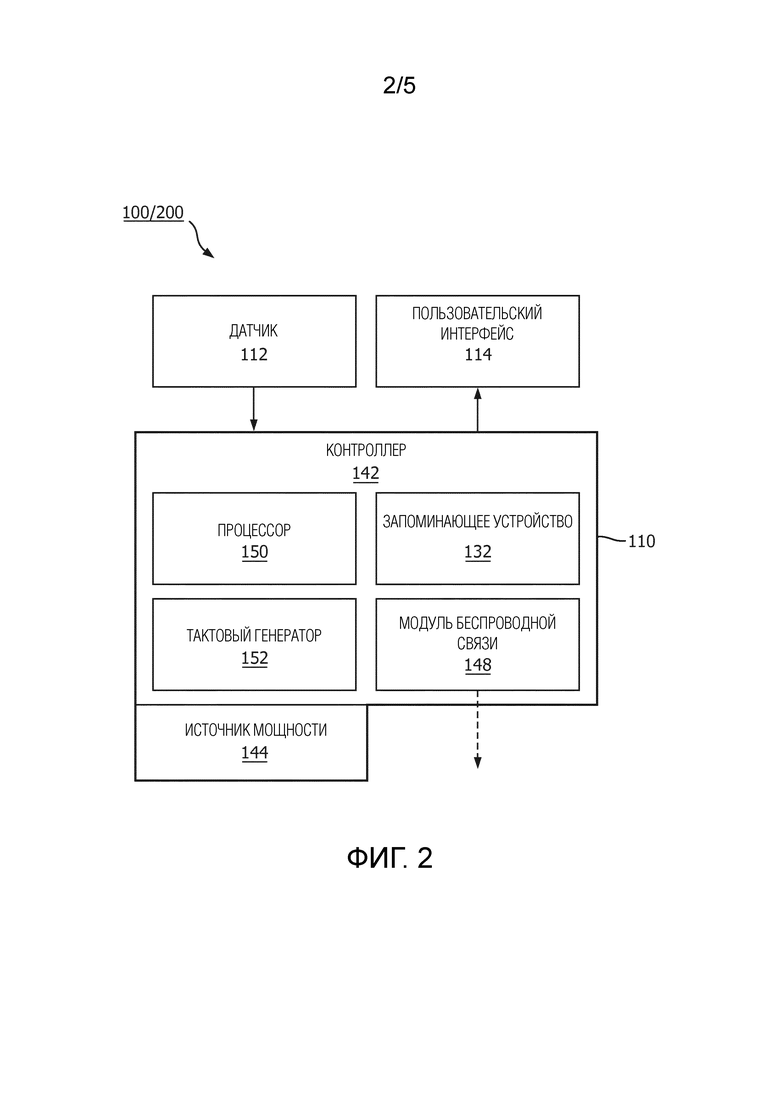
[0031] Фиг. 2 является схематичным представлением базовых управляющих компонентов систем по фиг. 1 и фиг. 4 согласно варианту осуществления.
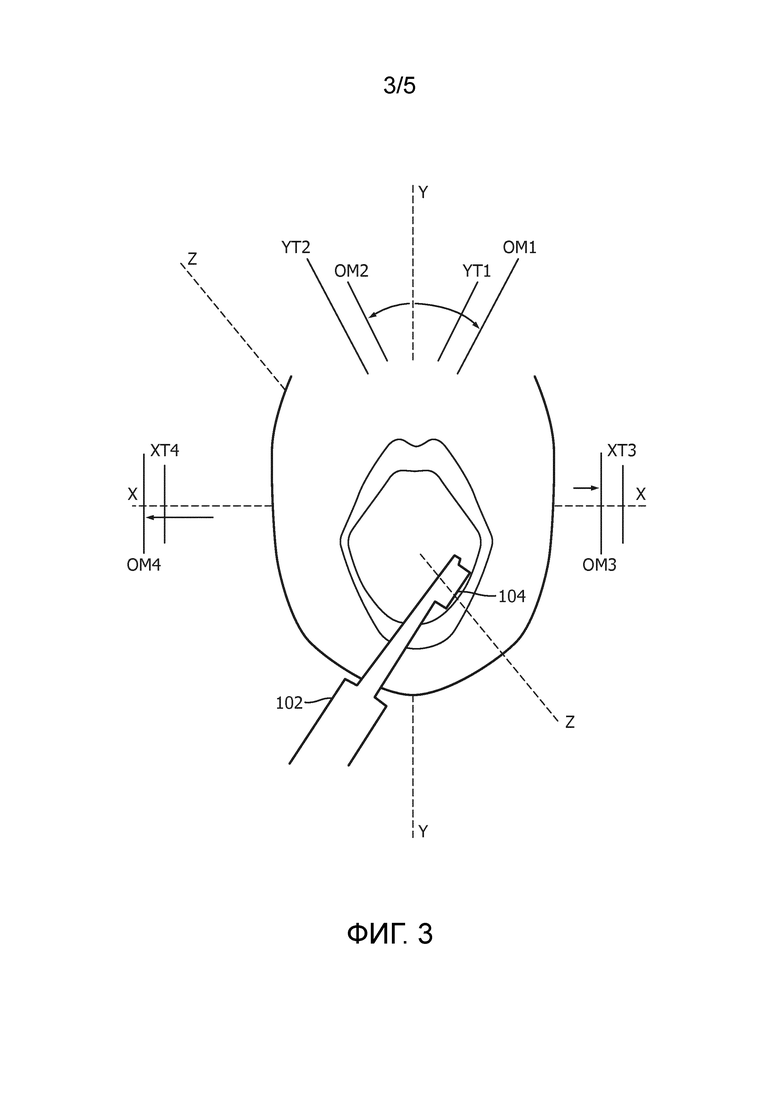
[0032] Фиг. 3 является схематичным представлением головы пользователя в ходе использования устройства для ухода за полостью рта с пороговым значением и индикаторами наблюдаемых перемещений/позиций согласно варианту осуществления.
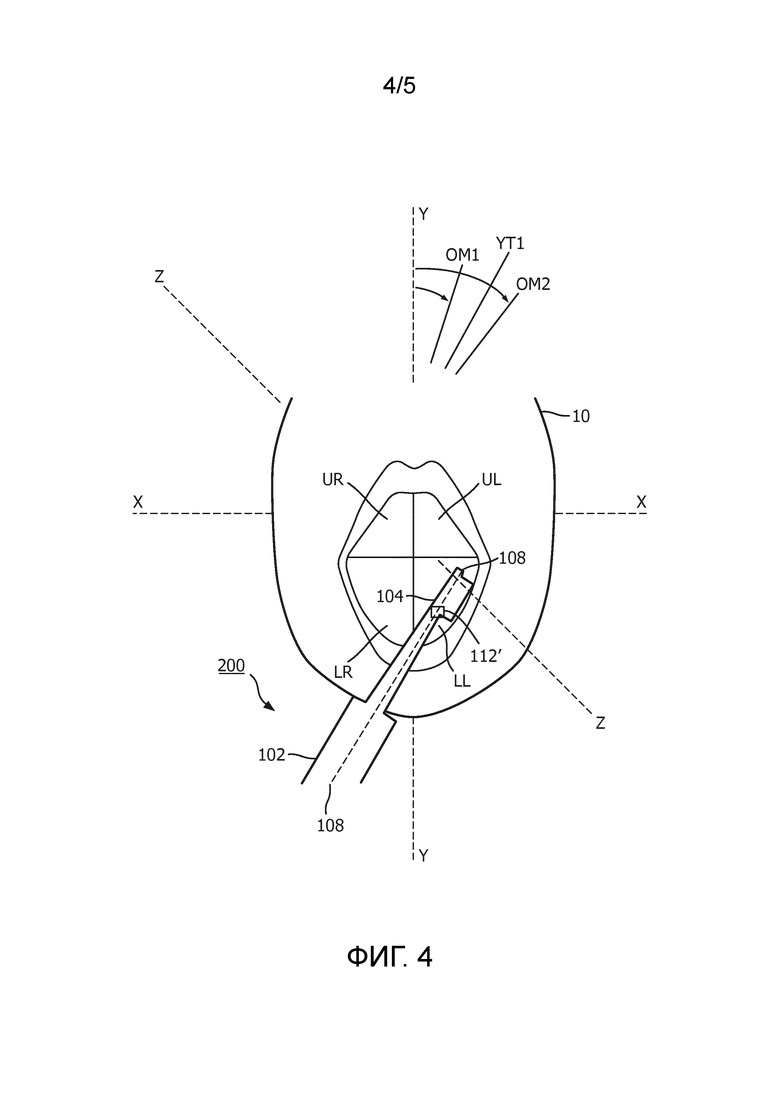
[0033] Фиг. 4 является схематичным представлением системы для обнаружения перемещения пользователя в ходе использования устройства для ухода за полостью рта и предоставления обратной связи пользователю, когда перемещение пользователя достигает или превышает пороговое значение согласно альтернативному варианту осуществления.
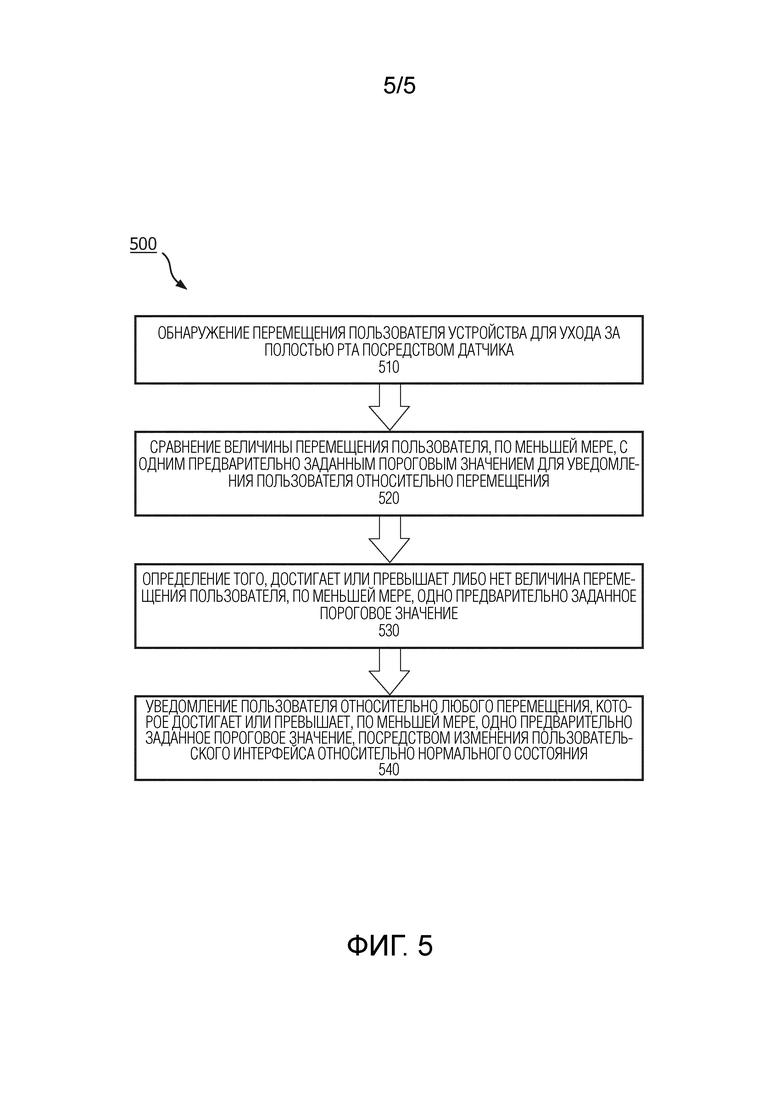
[0034] Фиг. 5 является блок-схемой последовательности операций способа для обнаружения перемещения пользователя в ходе использования устройства для ухода за полостью рта и предоставления обратной связи пользователю, когда перемещение пользователя достигает или превышает пороговое значение согласно варианту осуществления.
Подробное описание вариантов осуществления
[0035] Настоящее раскрытие сущности направлено на изобретаемые системы и способы для обнаружения перемещения пользователя в ходе использования устройства для ухода за полостью рта и предоставления обратной связи пользователю, когда перемещение пользователя достигает или превышает пороговое значение. Если обобщить, заявитель признает и принимает во внимание, что должно быть преимущественным отслеживать перемещение пользователя, отдельно от или помимо устройства для ухода за полостью рта, с тем чтобы предоставлять более точную обратную связь пользователю. Различные варианты осуществления и реализации в данном документе направлены на систему, которая включает в себя датчик соблюдения требований по местоположению, позиции и/или перемещению, который может конфигурироваться или программироваться с возможностью обнаруживать перемещение пользователя в ходе использования устройства для ухода за полостью рта. Датчик может располагаться за пределами устройства для ухода за полостью рта и встраиваться в цифровой носитель. Альтернативно, датчик может встраиваться в самом устройстве для ухода за полостью рта. Датчик может соединяться (в беспроводном режиме или не в беспроводном режиме) с контроллером, включающим в себя процессор и энергонезависимый носитель хранения данных для сохранения программного кода, который может программироваться с возможностью осуществлять проверку соблюдения требований посредством сравнения считываемой величины (количества или качества) перемещения с пороговым значением/величиной (количеством или качеством) перемещения и определять то, достигает или превышает либо нет считываемая величина перемещения пороговое значение/величину. Контроллер дополнительно может программироваться с возможностью уведомлять пользователя в случае, если перемещение пользователя достигает или превышает пороговое значение/величину, посредством изменения/модификации пользовательского интерфейса (который может располагаться на или может быть отдельным от устройства для ухода за полостью рта) относительно нормального состояния или иного предоставления конкретного индикатора (например, визуального индикатора) пользователю.
[0036] Конкретная неограничивающая цель использования вариантов осуществления и реализаций в данном документе состоит в том, чтобы предоставлять определенную обратную связь пользователю электрической зубной щетки, например, зубной щетки Philips Sonicare™ (изготовлена компанией Koninklijke Philips Electronics, N.V.). Эта информация, например, может быть связана с предупреждениями, инструкциями, индикаторами или сообщениями с результатами сенсорных измерений, связанными с перемещением тела (или, в частности, головы) пользователя за пределами предварительно заданного порогового значения(й), чтобы в результате обеспечивать лучшее использование электрической зубной щетки.
[0037] Согласно другим вариантам осуществления и реализациям, применимые предупреждения/информация/индикаторы/сообщения могут предоставляться пользователям любых электрических медицинских устройств, стоматологических устройств, устройств для бритья, устройств для ухода за внешностью, устройств для ухода за матерью и ребенком (карманных и некарманных) либо других устройств личной гигиены, например, которые могут включать и извлекать выгоду из конфигураций и функциональностей, описанных в данном документе (как должны принимать во внимание специалисты в данной области техники в связи с прочтением этого раскрытия сущности).
[0038] Ссылаясь на фиг. 1, в одном варианте осуществления, схематичное представление системы 100, сконфигурированной и/или запрограммированной с возможностью обнаруживать перемещение пользователя 10 в пределах области A датчиков в ходе использования устройства 102 для ухода за полостью рта (такого как зубная щетка, ороситель для полости рта либо другое устройство для очистки зубов или десен), имеющего участок 104 дальнего наконечника или головки, чтобы определять то, достигает или превышает либо нет перемещение пользователя пороговое значение, и предоставлять обратную связь пользователю, когда перемещение пользователя достигает или превышает пороговое значение. Система 100 может содержать вычислительное устройство 110 с одним или более датчиков 112 и пользовательским интерфейсом 114. Один или более датчиков 112 и пользовательский интерфейс 114 могут встраиваться в вычислительное устройство 110 либо быть отдельными по отношению к нему и соединяться с ним с возможностью связи и работы.
[0039] Согласно варианту осуществления, вычислительное устройство 110 может представлять собой компьютер общего назначения, мобильное устройство, смартфон, планшетный компьютер, пользовательское выделенное вычислительное устройство или любое другое вычислительное устройство, допускающее сохранение и выполнение алгоритма(ов)/программы, описанных в данном документе. Вычислительное устройство 110 может конфигурироваться и/или программироваться с помощью алгоритма/программы отслеживания лица, как должны принимать во внимание и понимать специалисты в данной области техники в связи с прочтением этого раскрытия сущности. Программа, управляемая посредством вычислительного устройства 110, может представлять собой мобильное или другое приложение, которое также может быть выполнено с возможностью отображать в пользовательском интерфейсе 114 индикаторы с обратной связью пользователю на основе анализа и определений, выполненных посредством контроллера 142 (см. фиг. 2), реализующего программу, на основе ввода датчика 112 относительно перемещения пользователя в ходе использования устройства 102 для ухода за полостью рта. В варианте осуществления, в котором вычислительное устройство 110 представляет собой устройство, физически отдельное и функционально соединенное с другим вычислительным устройством, выполняющим конкретное приложение, вычислительное устройство 110 может взаимодействовать с отдельным вычислительным устройством, выполняющим конкретное приложение, для такого анализа, определения и отображения. Дополнительно, вычислительное устройство 110 может быть ассоциировано с пользовательским интерфейсом 114, физически отдельным от вычислительного устройства 110, для отображения индикаторов с обратной связью пользователю 10. Например, вычислительное устройство 110 может быть ассоциировано с зеркалом, к примеру, с "интеллектуальным зеркалом", в котором пользователь может видеть свое лицо при использовании устройства 102 гигиены полости рта. Согласно варианту осуществления, интеллектуальное зеркало может содержать дисплей (или альтернативный пользовательский интерфейс 114) позади полуполупрозрачного зеркала.
[0040] Согласно дополнительному варианту осуществления, один или более датчиков 112 могут включать в себя двумерный, трехмерный, видео-, инфракрасный (IR), ультрафиолетовый (UV) или другой датчик изображений (как должны принимать во внимание и понимать специалисты в данной области техники в связи с прочтением этого раскрытия сущности) либо комбинацию вышеозначенного, сконфигурированную и/или запрограммированную с возможностью обнаруживать или иным образом захватывать перемещение пользователя (например, посредством захвата традиционных цифровых двумерных изображений или трехмерных изображений и т.д.). Например, датчик 112 может представлять собой стандартную CMOS-камеру или может представлять собой камеру, встроенную в мобильное устройство. Датчик 112 также может содержать множество оптических датчиков. Например, один оптический датчик может быть выполнен с возможностью принимать инфракрасный свет или ультрафиолетовый свет, в то время как другой выполнен с возможностью просматривать и захватывать двумерное или трехмерное изображение лица пользователя. В варианте осуществления более чем с одним датчиком 112, множество датчиков могут быть размещены во множестве позиций вокруг и сфокусированы на пользователе в пределах области A датчиков (надлежащим образом для данного окружения и формы, размера и позиции пользователя в пределах области A датчиков, как должны понимать специалисты в данной области техники в связи с прочтением этого раскрытия сущности). Если более чем один датчик 112 предусмотрен и используется, ввод датчика из используемого датчика может анализироваться по отдельности или в качестве комбинированного ввода посредством вычислительного устройства 110. Такой комбинированный ввод может усредняться, и/или ввод из определенных датчиков 112 может взвешиваться в зависимости от значимости показания конкретного датчика 112 (которое может зависеть от позиционирования и угла датчика 112 относительно пользователя 10).
[0041] Обращаясь к фиг. 2, согласно варианту осуществления, предоставляется схематичное представление базовых управляющих компонентов системы 100 (и системы 200, как описано ниже). Как описано в данном документе, система 100 может программироваться и/или конфигурироваться с возможностью обнаруживать перемещение пользователя 10 в пределах области A датчиков в ходе использования устройства 102 для ухода за полостью рта, имеющего участок 104 дальнего наконечника или головки, и предоставлять обратную связь пользователю, когда перемещение пользователя достигает или превышает пороговое значение. Согласно варианту осуществления, определенные управляющие компоненты могут встраиваться в вычислительное устройство 110 и могут включать в себя контроллер 142, который программируется и/или конфигурируется с возможностью анализировать информацию/данные, передавать/принимать информацию, данные и/или команды (управляющие сигналы) из/в каждый из других соответствующих компонентов вычислительного устройства 110 либо внешних компонентов/устройств надлежащим образом для того, чтобы выполнять функции, и способы, описанные в данном документе (как должны принимать во внимание и понимать специалисты в данной области техники в связи с прочтением этого раскрытия сущности). Как подробнее пояснено в данном документе, информация/данные, которые могут анализироваться и/или использоваться посредством контроллера 142, чтобы выполнять функции и способы, описанные в данном документе, могут обнаруживаться посредством и приниматься из одного или более датчиков 112. Короче говоря, контроллер 142 может программироваться и/или конфигурироваться с возможностью осуществлять (i) обнаружение посредством датчика 112 перемещения пользователя 10 в пределах области A датчиков в ходе использования устройства 102 для ухода за полостью рта, (ii) анализ обнаруженного перемещения пользователя, (iii) определение того, достигает или превышает либо нет перемещение пользователя пороговое значение, и (iv) предоставление обратной связи пользователю в пользовательском интерфейсе 114, когда перемещение пользователя достигает или превышает пороговое значение.
[0042] Согласно дополнительному варианту осуществления, как показано на фиг. 2, в дополнение к датчику 112, пользовательскому интерфейсу 114 и контроллеру 142, управляющие компоненты системы 100 также могут включать в себя, например, источник 144 мощности, процессор 150 и энергонезависимый носитель хранения данных, содержащий программный код (чтобы инструктировать процессору 150 выполнять алгоритм/программу в соответствии с различными вариантами осуществления, описанными в данном документе), запоминающее устройство 132, тактовый генератор 152 и модуль 148 беспроводной связи (каждый из которых может представлять собой часть контроллера 142). Датчик 112 может представлять собой любой из датчиков, описанных или иным образом предусмотренных в данном документе, и может программироваться и/или конфигурироваться с возможностью получать данные датчиков относительно одного или более аспектов перемещения пользователя (например, перемещения головы) во время сеанса чистки. Контроллер 142 может принимать данные датчиков из датчика 112 в реальном времени или периодически. Например, датчик 112 может отправлять постоянный поток данных датчиков в контроллер 142 для хранения и/или анализа либо может временно сохранять и агрегировать или обрабатывать данные до их отправки в контроллер 142. После приема посредством контроллера 142, данные датчиков из сеанса чистки могут обрабатываться посредством процессора 150. Согласно варианту осуществления, обработка, в общем, может содержать один или более следующих этапов: (i) нормализация или иная обработка данных датчиков для дополнительного анализа; (ii) извлечение сохраненных предварительно запрограммированных или определяемых пользователем стандартов/пороговых значений перемещения пользователя из запоминающего устройства 132 (которые могут вводиться в вычислительное устройство 110, как должны принимать во внимание специалисты в данной области техники в связи с прочтением этого раскрытия сущности); (iii) сравнение данных датчиков с извлеченными стандартами/пороговыми значениями; (iv) определение того, существуют или нет какие-либо данные датчиков, которые удовлетворяют или в достаточной степени отличаются (за пределами предварительно заданного порогового значения) от извлеченных стандартов; (v) определение того, инициируют или нет данные датчиков вывод пользователю на основе сохраненных стандартов; и (vi) вывод данных пользователю в индикаторе в пользовательском интерфейсе 114 относительно инициирующих данных датчиков. Другими словами, данные датчиков могут сравниваться с предварительно запрограммированными стандартами/пороговыми значениями, чтобы определять то, обеспечивается или нет отображение конкретного индикатора в пользовательском интерфейсе 114 (например, выпрямить голову посредством наклона немного налево). Дополнительно, временное распределение отображения конкретного индикатора в пользовательском интерфейсе 114 может быть в реальном времени или периодически, со ссылкой на тактовый генератор 152 при необходимости.
[0043] Модуль 148 беспроводной связи может конфигурироваться и/или программироваться с возможностью передавать данные датчиков в беспроводное приемо-передающее устройство (не показано). Например, модуль 148 беспроводной связи может передавать данные датчиков через Wi-Fi-соединение по Интернету или сети intranet специалисту-стоматологу, в базу данных или другое местоположение. Альтернативно, модуль 148 беспроводной связи может передавать данные датчиков или обратной связи через Bluetooth или другое беспроводное соединение в локальное устройство (например, отдельное вычислительное устройство), базу данных или другое приемо-передающее устройство. Например, модуль 148 беспроводной связи обеспечивает возможность пользователю передавать данные датчиков в отдельную базу данных, которая должна храниться для долговременного хранения, передавать данные датчиков для дополнительного анализа, передавать обратную связь с пользователем в отдельный пользовательский интерфейс 114 или совместно использовать данные со специалистом-стоматологом, в числе других вариантов использования. Модуль 148 беспроводной связи также может представлять собой приемо-передающее устройство, которое может принимать информацию пользовательского ввода, включающую в себя вышеуказанные стандарты (как должны принимать во внимание специалисты в данной области техники в связи с прочтением этого раскрытия сущности). Другие сигналы связи и управляющие сигналы, описанные в данном документе, могут осуществляться посредством проводного (небеспроводного) соединения либо посредством комбинации беспроводных и небеспроводных соединений.
[0044] Согласно варианту осуществления, статистически собираемые данные могут считываться посредством датчика 112 и собираться и сохраняться в запоминающем устройстве 132. Например, среднее значение за день, неделю, месяц и т.д. для перемещения пользователя, выше, ниже или равное предварительно заданному пороговому значению, может сохраняться со ссылкой на тактовый генератор 152. Конкретный индикатор может отображаться в пользовательском интерфейсе 114 с указанием пользователю того, что его перемещение улучшается или становится хуже со временем.
[0045] Преимущества вариантов осуществления (как кратко пояснено выше и показано на фиг. 1 и 2 и описано ниже и показано на фиг. 3) проиллюстрированы посредством нижеприведенного описания примерных вариантов использования со ссылкой на фиг. 3. Тем не менее, их конкретные компоненты, варианты использования, функциональности и величины, изложенные в этом описании, а также другие условия и подробности должны интерпретироваться как широко применяемые в данной области техники и не должны истолковываться как ненадлежащим образом сдерживающие или ограничивающие изобретение каким-либо образом.
[0046] Ссылаясь на фиг. 3, в одном варианте осуществления, схематичное представление головы пользователя 10 показано с осью X, осью Y и осью Z, позиционированными на ней. Определенные предварительно заданные/предварительно запрограммированные стандарты/пороговые значения (T), которые могут сохраняться в запоминающем устройстве 132 и извлекаться посредством процессора 150 надлежащим образом, показаны вдоль или относительно определенных осей (т.е. Y и X) и могут включать в себя следующее: (i) YT1: указывает первое пороговое расстояние от оси Y, на которое голова пользователя может быть наклонена влево относительно пользователя в направлении положительной оси X; (ii) YT2: указывает второе пороговое расстояние от оси Y, на которое голова пользователя может быть наклонена вправо относительно пользователя в направлении отрицательной оси X; (iii) XT3: указывает третье пороговое расстояние, на которое голова пользователя может перемещаться влево относительно пользователя вдоль положительной оси X; и (iv) XT4: указывает четвертое пороговое расстояние, на которое голова пользователя может перемещаться вправо относительно пользователя вдоль отрицательной оси X. Даже если множество пороговых значений показаны на фиг. 3, может быть предусмотрено одно пороговое значение или более одного порогового значения, которые могут реализовываться для любого данного сеанса чистки.
[0047] Согласно варианту осуществления, каждый из стандартов/пороговых значений, показанных на фиг. 3, может измеряться/иллюстрироваться/вычисляться из первой точки времени, т.е. когда голова пользователя существует, и три оси позиционируются на ней в конкретный момент времени (голова может не быть идеально прямой, но, тем не менее, эта точка головы в пространстве может представлять собой опорную точку во время 0), и наблюдаемое перемещение в течение периода времени от этой опорной точки может измеряться. Другими словами, эта опорная точка может представлять собой первый момент времени, когда датчик получает первое показание. Наблюдаемое перемещение пользователя (изменение/дельта местоположения относительно этой опорной точки 0 со ссылкой на одну или более из трех осей) может измеряться из этой точки, и анализ и определения могут выполняться в отношении того, достигает или превышает либо нет перемещение пользователя какие-либо пороговые значения, и в отношении того, должен или нет индикатор отображаться пользователю на пользовательском интерфейсе 114.
[0048] Датчик 112 системы 100 может использоваться для того, чтобы обнаруживать перемещение пользователя из опорной точки 0 в течение периода времени, и может передавать эти данные в контроллер 142. Контроллер 142 может передавать эти данные в процессор 150, который может программироваться с возможностью осуществлять различные алгоритм(ы)/программу(ы), описанные в данном документе, включающие в себя алгоритм(ы)/программа(ы) отслеживания лица. Алгоритм(ы)/программа(ы) отслеживания лица могут включать в себя алгоритмический модуль(и), включающий в себя субкомпоненты для извлечения характерных признаков из данных, предоставленных посредством датчика 112 (например, субкомпонент детектора лица и субкомпонент для характеристики перемещения лица пользователя в двумерной или трехмерной форме за период времени), сравнения этих признаков с одним или более предварительно заданных стандартов/пороговых значений (например, субкомпонент для сравнения наблюдаемого перемещения с предварительно заданными стандартами/пороговыми значениями) и отображения индикатора либо иного изменения пользовательского интерфейса 114 из существующего состояния, когда один или более предварительно заданных стандартов/пороговых значений удовлетворяется или превышается (субкомпонент для предоставления уровня соблюдения требований на основе расстояния между наблюдаемыми признаками и предварительно заданными стандартами/пороговыми значениями). Расстояние может задаваться, например, в качестве расстояния между двумя векторами признаков, как показано в двух отдельных цифровых изображениях, захваченных посредством датчика 112, и может соответствовать соответствующим пиксельным значениям, например, каждого цифрового изображения (как должны понимать специалисты в данной области техники в связи с прочтением этого раскрытия сущности). Это может включать в себя, например, расстояние между вектором признаков кончика носа пользователя в опорной точке 0 и во время 0 и вектором признаков кончика носа пользователя в точке N в пространстве во время N'. Альтернативно, расстояние может задаваться как расстояние между максимальными значениями измеренного расстояния вектора признаков кончика носа пользователя в течение конкретного периода времени после времени 0 и из опорной точки 0. Дополнительно, такие расстояния могут взвешиваться на основе критичности характерных признаков (например, перемещение в направлении от оси Y является менее желательным, чем перемещение вдоль оси Y). Алгоритм отслеживания лица может идентифицировать другие признаки лица пользователя, такие как контур лица пользователя, местоположение глаз, губ пользователя и т.д., каждый из которых может представляться посредством вектора признаков. Вычислительное устройство 110 после этого может обрабатывать сигналы, принимаемые посредством датчика 112, с тем чтобы идентифицировать местоположение пользователя в конкретное время после времени 0 и оценивать перемещение пользователя за пределами опорной точки 0.
[0049] Возвращаясь к фиг. 3, датчик 112 обнаруживает несколько фактических наблюдаемых перемещений/позиционирования (OM) в течение периода времени и передает эти наблюдаемые перемещения/позиции в контроллер 142 для дополнительного анализа, как изложено выше. Процессор 150 программируется с возможностью определять то, что наблюдаемые перемещения включают в себя следующее: (i) OM1: указывает первое наблюдаемое перемещение, при котором голова пользователя наклонена влево относительно пользователя на расстояние в направлении положительной оси X, и превышает первое пороговое расстояние YT1 во время 1; (ii) OM2: указывает второе наблюдаемое перемещение, при котором голова пользователя наклонена вправо относительно пользователя на расстояние в направлении отрицательной оси X, и не достигает или превышает второе пороговое расстояние YT2 во время 2; (iii) OM3: указывает третье наблюдаемое перемещение, при котором голова пользователя перемещается на расстояние вдоль положительной оси X, и не достигает или превышает третье пороговое расстояние XT3 во время 3; и (iv) OM4: указывает четвертое наблюдаемое перемещение, при котором голова пользователя перемещается на расстояние вдоль отрицательной оси X, и превышает четвертое пороговое расстояние XT4 во время 4.
[0050] Согласно варианту осуществления, в свете этих результатов, процессор 150 может отправлять управляющий сигнал в пользовательский интерфейс 114, чтобы предоставлять индикатор пользователю (например, выпрямить голову, прекратить перемещение головы, вернуть голову в опорную точку 0 или размыть пользовательский интерфейс до тех пор, пока пользователь не будет соблюдать требования по предпочтительной позиции головы или ограничению перемещения головы), когда пользователь превышает первое пороговое расстояние YT1 во время 1. Альтернативно, процессор 150 может отправлять управляющий сигнал в пользовательский интерфейс 114, чтобы предоставлять индикатор пользователю относительно того, когда пользователь превышает первое пороговое расстояние YT1 и четвертое пороговое расстояние XT4 либо только четвертое пороговое расстояние XT4 за конкретный период времени. Дополнительно, процессор 150 может отправлять управляющий сигнал в пользовательский интерфейс 114, чтобы предоставлять индикатор пользователю относительно того, когда пользователь достигает или превышает одно или более пороговых расстояний несколько раз за конкретный период времени. Согласно конкретным вариантам осуществления, не предусмотрено ограничителя периода времени. Специалисты в данной области техники должны принимать во внимание, в связи с прочтением этого раскрытия сущности, что процессор 150 может программироваться любым числом способов, чтобы предоставлять управляющий сигнал в пользовательский интерфейс, чтобы предоставлять конкретный индикатор пользователю с учетом конкретного отсутствия соблюдения требований любого числа возможных предварительно заданных пороговых значений.
[0051] Преимущества вариантов осуществления (как кратко пояснено выше и показано на фиг. 2 и описано ниже и показано на фиг. 4) проиллюстрированы посредством нижеприведенного описания примерных вариантов использования со ссылкой на фиг. 4. Тем не менее, их конкретные компоненты, варианты использования, функциональности и величины, изложенные в этом описании, а также другие условия и подробности должны интерпретироваться как широко применяемые в данной области техники и не должны истолковываться как ненадлежащим образом сдерживающие или ограничивающие изобретение каким-либо образом.
[0052] Ссылаясь на фиг. 4, согласно альтернативному варианту осуществления, показано схематичное представление системы 200, сконфигурированной и/или запрограммированной с возможностью обнаруживать перемещение пользователя 10 в ходе использования устройства 102 для ухода за полостью рта, определять то, достигает или превышает либо нет перемещение пользователя пороговое значение, и предоставлять обратную связь пользователю, когда перемещение пользователя достигает или превышает пороговое значение. В противоположность варианту осуществления датчика 112, показанного на фиг. 1, датчик 112' может встраиваться в устройство 102 для ухода за полостью рта. Такой датчик 112' может включать в себя одно или более из следующего: акселерометр, гироскоп, GPS или другое датчик местоположения, позиционирования и/или перемещения/движения (как должны принимать во внимание и понимать специалисты в данной области техники в связи с прочтением этого раскрытия сущности). Датчик 112' устройства для ухода за полостью рта может аналогично функционально соединяться с контроллером 142, с каждым из компонентов, как показано на фиг. 2, включающих в себя процессор 150, запоминающее устройство 132, тактовый генератор 152, источник 144 мощности, модуль 148 беспроводной связи и пользовательский интерфейс 114 (соответствующее раскрытие сущности которых явно содержится по ссылке полностью в данном документе в применении к этому варианту осуществления), который может встраиваться или быть отдельным от устройства 102 для ухода за полостью рта. Датчик 112' может быть выполнен с возможностью обнаруживать то, что пользователь берет устройство 102 для ухода за полостью рта либо снимает его из подставки и собирается использовать устройство 102 для ухода за полостью рта (т.е. позиционировано для использования). Например, датчик 112' может обнаруживать движение с использованием множества различных датчиков обнаружения движения и может отправлять сигнал в процессор 150 касательно того, что пользователь берет зубную щетку, и того, что надлежащий индикатор может проецироваться на пользовательском интерфейсе 114 надлежащим образом во время события чистки в соответствии с этим раскрытием сущности.
[0053] Как подробнее показано на фиг. 4, ось X, ось Y и ось Z позиционируются на голове пользователя 10 аналогично тому, как показано на фиг. 3. Определенные предварительно заданные/предварительно запрограммированные стандарты/пороговые значения (T) могут сохраняться в запоминающем устройстве 132 и извлекаться посредством процессора 150 надлежащим образом, как пояснено выше со ссылкой на фиг. 3. Например, показан следующий предварительно заданный/предварительно запрограммированный стандарт/пороговое значение: YT1: указывает первое пороговое расстояние от оси Y, на которое голова пользователя может быть наклонена влево относительно пользователя в направлении положительной оси X. Даже если одно пороговое значение показано на фиг. 4, может быть предусмотрено более одного порогового значения, которые могут реализовываться для любого данного сеанса чистки. Дополнительно, следующие сегменты рта проиллюстрированы на фиг. 4: верхний левый угол (UL), нижний левый угол (LL), верхний правый угол (UR) и нижний правый угол (LR).
[0054] Согласно варианту осуществления, как пояснено относительно фиг. 3, стандарт/пороговое значение, показанный на фиг. 4, может измеряться/иллюстрироваться/вычисляться из первой точки времени, т.е. когда голова пользователя существует, и три оси позиционируются на ней в конкретный момент времени (голова может не быть идеально прямой, но, тем не менее, эта точка головы в пространстве может представлять собой опорную точку во время 0), и наблюдаемое перемещение в течение периода времени от этой опорной точки может измеряться. Другими словами, эта опорная точка может представлять собой первый момент времени, когда датчик получает первое показание, и наблюдаемое перемещение пользователя (изменение/дельта местоположения относительно этой опорной точки 0 со ссылкой на одну или более из трех осей) может измеряться из этой точки, и анализ и определения может выполняться в отношении того, достигает или превышает либо нет перемещение пользователя какие-либо пороговые значения, и выполняться в отношении того, должен или нет индикатор отображаться пользователю на пользовательском интерфейсе 114.
[0055] Датчик 112' может использоваться для того, чтобы обнаруживать перемещение пользователя из опорной точки 0 в течение периода времени, и может передавать эти данные в контроллер 142. Контроллер 142 может передавать эти данные в процессор 150, который может программироваться с возможностью осуществлять различный алгоритм(ы)/программу(ы). Алгоритм(ы)/программа(ы) может включать в себя алгоритмический модуль(и), включающий в себя субкомпоненты для извлечения характерных признаков из данных, предоставленных посредством датчика 112' (например, субкомпонент для определения местоположения устройства 102 для ухода за полостью рта в сегменте рта на основе ввода датчика), сравнения этих признаков с одним или более предварительно заданных стандартов/пороговых значений (например, субкомпонент, сравнивающий наблюдаемое местоположение с предварительно заданными стандартами/пороговыми значениями) и отображения индикатора либо иного изменения пользовательского интерфейса 114 из существующего состояния, когда один или более предварительно заданных стандартов/пороговых значений удовлетворяется или превышается (субкомпонент, предоставляющий уровень соблюдения требований на основе расстояния между наблюдаемыми признаками/местоположениями и предварительно заданными стандартами/пороговыми значениями).
[0056] Возвращаясь к фиг. 4, датчик 112' обнаруживает устройство для ухода за полостью рта во рту пользователя 10 в сегменте LL и пользователя, чистящего нижний левый ряд зубов в направлении продольной оси 108 устройства 102 для ухода за полостью рта с щетинками, обращенными вниз к нижним левым зубам в опорной точке 0 во время 0 (например, как обнаружено посредством акселерометра, характеризующего ускорение устройства ухода за полостью рта в направлении вдоль продольной оси 108, гироскопа, указывающего то, что щетинки обращены вниз, и/или датчика GPS-позиции или другого датчика местоположения, чтобы указывать то, что устройство 102 для ухода за полостью рта находится внутри сегмента LL, каждый из которых может представлять собой часть датчика 112'). Вычислительное устройство 110, как показано и описано с помощью фиг. 1-3 выше, может использоваться в связи с вариантом осуществления, показанным и описанным относительно фиг. 4, чтобы помогать со считыванием местоположения лица пользователя и т.д.
[0057] Датчик 112' обнаруживает несколько фактических наблюдаемых перемещений (OM) из опорной точки 0 (например, наклон головы пользователя налево к положительной оси X, который может определяться посредством гироскопа по мере того, как пользователь продолжает чистку левого нижнего ряда зубов в сегменте LL рта, как описано выше, и частично определяться посредством акселерометра и/или других датчиков местоположения), в течение периода времени и передает эти наблюдаемые перемещения в контроллер 142 для дополнительного анализа, как изложено выше. Процессор 150 программируется с возможностью определять то, что наблюдаемые перемещения включают в себя следующее: (i) OM1: указывает первое наблюдаемое перемещение, при котором голова пользователя наклонена влево относительно пользователя на расстояние в направлении положительной оси X, и не достигает или превышает первое пороговое расстояние YT1 во время 1; и (ii) OM2: указывает второе наблюдаемое перемещение, при котором голова пользователя наклонена влево относительно пользователя на расстояние в направлении положительной оси X, и превышает первое пороговое расстояние YT1 во время 2.
[0058] Согласно варианту осуществления, в свете этих результатов и аналогично фиг. 3 и соответствующему описанию, процессор 150 может отправлять управляющий сигнал в пользовательский интерфейс 114, чтобы предоставлять индикатор пользователю (например, выпрямить голову, прекратить перемещение головы, вернуть голову в опорную точку 0 или размыть пользовательский интерфейс до тех пор, пока пользователь не будет соблюдать требования по предпочтительной позиции головы или ограничению перемещения головы), когда пользователь превышает первое пороговое расстояние YT1 во время 2. Специалисты в данной области техники должны принимать во внимание, в связи с прочтением этого раскрытия сущности, что процессор 150 может программироваться любым числом способов, чтобы предоставлять управляющий сигнал в пользовательский интерфейс, чтобы предоставлять конкретный индикатор пользователю с учетом конкретного отсутствия соблюдения требований любого числа возможных предварительно заданных пороговых значений.
[0059] Ссылаясь на фиг. 5, раскрыта блок-схема последовательности операций, иллюстрирующая способ 500 для обнаружения перемещения пользователя в ходе использования устройства для ухода за полостью рта и предоставления обратной связи пользователю, когда перемещение пользователя достигает или превышает пороговое значение. Этот способ может выполняться посредством связанного с датчиком 112 или 112' варианта осуществления, например, расположенного за пределами или встроенного в устройство 102 для ухода за полостью рта (или посредством вариантов осуществления в комбинации), как описано выше. На этапе 510, перемещение пользователя устройства для ухода за полостью рта обнаруживается посредством датчика 112/112', и эта информация передается в контроллер 142. На этапе 520, величина перемещения пользователя сравнивается посредством контроллера 142/процессора 150, по меньшей мере, с одним предварительно заданным пороговым значением для уведомления пользователя относительно перемещения. На этапе 530, выполняется определение посредством контроллера 142/процессора 150 относительно того, достигает или превышает либо нет величина перемещения пользователя, по меньшей мере, одно предварительно заданное пороговое значение. Этот этап может включать в себя этапы извлечения, посредством контроллера 142/процессора 150 (в любом датчике с камерой или без камеры, как пояснено в данном документе, и как должны понимать специалисты в данной области техники в связи с прочтением этого раскрытия сущности), наборов видеопризнаков, включающих в себя позиции частей лица пользователя, из захваченных изображений или других полученных данных датчиков, вычисления разностей между наборами видеопризнаков и сравнения разностей с предварительно заданными/пороговыми значениями. Разности между наборами видеопризнаков могут представлять собой расстояния между позициями частей лица пользователя для каждого изображения, и соответствующие предварительно заданные значения могут представлять собой приемлемые расстояния перемещения для каждой части лица. Если обобщить, этот этап может включать в себя извлечение, посредством контроллера 142/процессора 150, наборов линейных или нелинейных признаков из полученных данных датчиков, вычисление, посредством контроллера 142/процессора 150, разностей между наборами линейных или нелинейных признаков и сравнение разностей с предварительно заданными значениями. Этот этап также может включать в себя вычисление взвешенного расстояния между разностями и соответствующими предварительно заданными значениями. На этапе 540, контроллер 142/процессор 150 отправляет сигнал в пользовательский интерфейс 114, чтобы уведомлять пользователя относительно любого перемещения, которое достигает или превышает, по меньшей мере, одно предварительно заданное пороговое значение, посредством изменения пользовательского интерфейса относительно нормального состояния. Изменение пользовательского интерфейса относительно нормального состояния может включать в себя размытие видеоизображения.
[0060] Следует понимать, что все определения, задаваемые и используемые в данном документе, контролируются согласно словарным определениям, определениям в документах, включенных по ссылке, и/или обычному смыслу задаваемых терминов.
[0061] Использование единственного числа не исключает возможности использовать множественное число.
[0062] Фраза "и/или", при использовании в подробном описании и в формуле изобретения, должна пониматься как означающая "один или оба" из элементов, сочетающихся таким образом, т.е. элементов, которые совместно присутствуют в некоторых случаях и отдельно присутствуют в других случаях. Несколько элементов, перечисленных с "и/или", должны трактоваться одинаково, т.е. "один или более" из элементов, сочетающихся таким образом. Необязательно могут присутствовать другие элементы, отличные от элементов, конкретно идентифицированных посредством выражения "и/или", будь то связанные или несвязанные с конкретно идентифицированными элементами.
[0063] При использовании в подробном описании и в формуле изобретения, "или" должно пониматься как имеющее тот же смысл, как "и/или", как задано выше. Например, при разделении пунктов в списке, "или" или "и/или" должно интерпретироваться как включающее в себя, т.е. включение, по меньшей мере, одного, но также включающее в себя более одного из определенного числа или списка элементов и, необязательно, дополнительные не включенные в список пункты. Только термины, явно указанные с обратным смыслом, такие как "только один из" или "точно один из", либо, при использовании в формуле изобретения, "состоящий из", упоминаются как включение точно одного элемента из определенного числа или списка элементов. В общем, термин "или" при использовании в данном документе должен интерпретироваться только как указывающий исключающие альтернативы (т.е. "один или другой, но не оба"), когда ему предшествуют термины исключительности, такие как "любой", "один из", "только один из" или "точно один из".
[0064] При использовании в подробном описании и в формуле изобретения, фраза "по меньшей мере, один" в ссылке на список из одного или более элементов должна пониматься как означающая, по меньшей мере, один элемент, выбранный из любого одного или более элементов в списке элементов, но не обязательно включающий в себя, по меньшей мере, один из каждого элемента, конкретно перечисленного в списке элементов, и исключающий какие-либо комбинации элементов в списке элементов. Это определение также обеспечивает возможность того, что необязательно могут присутствовать элементы, отличные от элементов, конкретно идентифицированных в списке элементов, к которым относится фраза "по меньшей мере, один", будь то связанные или несвязанные с конкретно идентифицированными элементами.
[0065] Также следует понимать, что, если явно не указано иное, в любых способах, заявленных в данном документе, которые включают в себя более одного этапа или действия, порядок этапов или действий способа не обязательно ограничен порядком, в котором изложены этапы или действия способа.
[0066] В формуле изобретения, а также в вышеприведенном подробном описании, все переходные фразы, такие как "содержащий", "включающий в себя", "переносящий", "имеющий", "содержащий", "заключающий в себе", "хранящий", "состоящий из" и т.п., должны пониматься как открытые, т.е. означающие включающий в себя, но не только. Только переходные фразы "состоящий из" и "состоящий в своей основе из" должны быть закрытыми или полузакрытыми переходными фразами, соответственно.
[0067] Хотя несколько изобретаемых вариантов осуществления описано и проиллюстрировано в данном документе, специалисты в данной области техники должны легко представлять себе множество других средств и/или структур для осуществления функций и/или получения результатов и/или одного или более преимуществ, описанных в данном документе, и каждое из таких изменений и/или модификаций считается в пределах объема изобретаемых вариантов осуществления, описанных в данном документе. Если обобщать, специалисты в данной области техники должны легко принимать во внимание, что все параметры, размеры, материалы и конфигурации, описанные в данном документе, имеют намерение быть примерными, и что фактические параметры, размеры, материалы и/или конфигурации зависят от конкретного варианта применения или вариантов применения, для которых используются изобретаемые идеи. Специалисты в данной области техники должны признавать или иметь возможность устанавливать с помощью не более чем обычных экспериментов множество эквивалентов для конкретных изобретаемых вариантов осуществления, описанных в данном документе. Следовательно, необходимо понимать, что вышеприведенные варианты осуществления представлены только в качестве примера, и что, в пределах объема прилагаемой формулы изобретения и ее эквивалентов, изобретаемые варианты осуществления могут осуществляться на практике способом, отличным от конкретно описанного и заявленного. Изобретаемые варианты осуществления настоящего раскрытия сущности направлены на каждый отдельный признак, систему, изделие, материал, комплект и/или способ, описанный в данном документе. Помимо этого, любая комбинация двух или более таких признаков, систем, изделий, материалов, комплектов и/или способов, если такие признаки, системы, изделия, материалы, комплекты и/или способы не являются взаимно несогласованными, включается в пределы изобретаемого объема настоящего раскрытия сущности.
Изобретение относится к уходу за полостью рта. Технический результат заключается в обнаружении перемещения пользователя в ходе использования устройства для ухода за полостью рта и предоставлении полезной обратной связи, чтобы улучшать соблюдение требований пользователем и улучшать поведение при чистке и/или гигиену полости рта пользователя. Такой результат достигается тем, что обнаруживают перемещение пользователя в ходе использования устройства для ухода за полостью рта; определяют то, достигает или превышает либо нет величина перемещения пороговое значение для уведомления пользователя относительно перемещения; и в случае, если перемещение достигает или превышает пороговое значение, уведомляют пользователя в отношении перемещения посредством изменения пользовательского интерфейса, ассоциированного с устройством для ухода за полостью рта, чтобы предоставлять визуальный индикатор пользователю, причем визуальный индикатор связан с перемещением тела или головы пользователя за пределами предварительно заданного порогового значения. 2 н. и 11 з.п. ф-лы, 5 ил.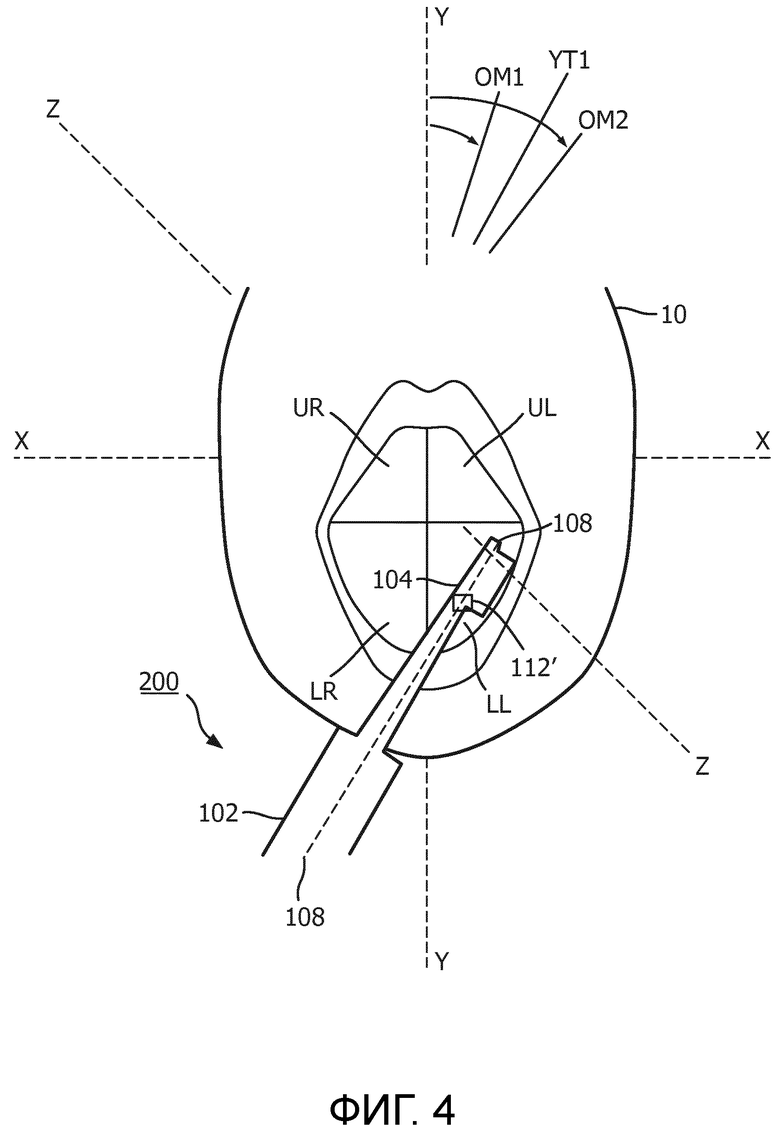
1. Способ для предоставления обратной связи пользователю устройства для ухода за полостью рта, при этом способ содержит этапы, на которых:
- обнаруживают (510) перемещение пользователя в ходе использования устройства для ухода за полостью рта;
- определяют (530) то, достигает или превышает либо нет величина перемещения пороговое значение для уведомления пользователя относительно перемещения; и
- в случае, если перемещение достигает или превышает пороговое значение, уведомляют (540) пользователя в отношении перемещения посредством изменения пользовательского интерфейса, ассоциированного с устройством для ухода за полостью рта, чтобы предоставлять визуальный индикатор пользователю,
причем визуальный индикатор связан с перемещением тела или головы пользователя за пределами предварительно заданного порогового значения.
2. Способ по п. 1, в котором этап обнаружения перемещения пользователя включает в себя этап, на котором захватывают двумерные или трехмерные изображения.
3. Способ по п. 1, в котором этап обнаружения перемещения пользователя включает в себя этап, на котором используют акселерометр или гироскоп, позиционированный в устройстве для ухода за полостью рта.
4. Способ по п. 1, в котором этап обнаружения перемещения пользователя включает в себя этап, на котором захватывают изображения пользователя с использованием камеры.
5. Способ по п. 4, в котором этап определения того, достигает или превышает либо нет величина перемещения пороговое значение, включает в себя этап, на котором извлекают наборы видеопризнаков, включающих в себя позиции частей лица пользователя, из захваченных изображений, вычисляют разности между наборами видеопризнаков и сравнивают разности с предварительно заданными значениями.
6. Способ по п. 5, в котором этап определения того, достигает или превышает либо нет величина перемещения пороговое значение, включает в себя этап, на котором вычисляют взвешенное расстояние между разностями и соответствующими предварительно заданными значениями.
7. Способ по п. 5, в котором разности между наборами видеопризнаков представляют собой расстояния между позициями частей лица пользователя для каждого изображения, при этом соответствующие предварительно заданные значения представляют собой пороговые расстояния перемещения для каждой части лица.
8. Способ по п. 1, в котором пользовательский интерфейс включает в себя видеоизображение, при этом изменение пользовательского интерфейса включает в себя размытие изображения.
9. Система (100, 200) для предоставления обратной связи пользователю путем осуществления способа по п. 1, при этом система содержит:
- датчик (112, 112') позиции, выполненный с возможностью определять позиции пользователя в ходе использования устройства для ухода за полостью рта;
- процессор (150), поддерживающий связь с датчиком позиции и выполненный с возможностью вычислять разности между определенными позициями и определять то, достигают или превышают либо нет разности пороговое значение для уведомления пользователя; и
- пользовательский интерфейс (114), поддерживающий связь с процессором и выполненный с возможностью предоставлять визуальный индикатор пользователю в случае, если разности между определенными позициями достигают или превышают пороговое значение.
10. Система по п. 9, в которой датчик позиции включает в себя камеру для того, чтобы захватывать изображения пользователя, при этом процессор выполнен с возможностью извлекать наборы видеопризнаков, включающих в себя позиции частей лица пользователя, из захваченных изображений, вычислять разности между наборами видеопризнаков и сравнивать разности с предварительно заданными значениями.
11. Система по п. 9, в которой датчик позиции представляет собой акселерометр или гироскоп, позиционированный в устройстве для ухода за полостью рта.
12. Система по п. 9, в которой процессор выполнен с возможностью вычислять взвешенное расстояние между разностями и соответствующими предварительно заданными значениями, при этом разности между наборами видеопризнаков представляют собой расстояния между позициями частей лица пользователя для каждого изображения, при этом соответствующие предварительно заданные значения представляют собой пороговые расстояния перемещения для каждой части лица.
13. Система по п. 9, в которой пользовательский интерфейс включает в себя видеоизображение, при этом процессор выполнен с возможностью размывать изображение в случае, если разности между определенными позициями превышают пороговое значение.
| US 20120190505 A1, 26.07.2012 | |||
| WO 2014202438 A1, 24.12.2014 | |||
| US 20150193134 A1, 09.07.2015 | |||
| US 20100170052 A1, 08.07.2010 | |||
| ИНСТРУМЕНТ ДЛЯ УХОДА ЗА ПОЛОСТЬЮ РТА, СОДЕРЖАЩИЙ ВЗАИМОДЕЙСТВУЮЩИЙ С ПОЛЬЗОВАТЕЛЕМ ДИСПЛЕЙ (ВАРИАНТЫ) | 2007 |
|
RU2421115C2 |
| СИСТЕМА ОТСЛЕЖИВАНИЯ ДЕНТАЛЬНОГО ПОЛОЖЕНИЯ ДЛЯ ЗУБНОЙ ЩЕТКИ | 2009 |
|
RU2496446C2 |
| ИНТЕЛЛЕКТУАЛЬНОЕ УСТРОЙСТВО КОНТРОЛЯ ДЛЯ ЗУБНОЙ ЩЕТКИ | 2009 |
|
RU2498786C2 |

