Изобретение относится к сельскому хозяйству, в частности механизация трудоемких процессов в животноводстве, и предназначается к использованию преимущественно на фермах крупного рогатого скота, для оптимизации процесса приготовления кормовой смеси и кормления животных.
Известен раздатчик-смеситель кормов (ав. св. СССР №1715265, А01K 5/00, 1990 г.), содержащий установленную на рельсы ходовую тележку с электроприводом, на тележке смонтирован конусообразный бункер с возможностью вращения вокруг своей продольной оси. Загрузочная горловина раздатчика смонтирована на меньшем основании бункера.
Недостатком известного устройства является, отсутствие системы весового контроля накопительной емкости, устройством не предусмотрено дозирование концентрированных кормовых добавок в состав корма, находящегося на кормовом столе или в кормушке, в устройстве отсутствуют компоненты связи для взаимодействия с системой управления стада, устройством не предусмотрена автономная работа без оператора.
Известно техническое решение по патенту (RU 2490879 С2, А01K 29/00, B01F 9/04 от 17.11.2011 г.), по которому мобильный раздатчик-смеситель кормов содержащий установленный на раме ходовой части с возможностью вращения вокруг своей продольной оси бункер, выполненный в виде полого цилиндра с одним закрытым торцем, загрузочную горловину и смонтированный у открытого торца бункера отделитель от монолита корма и его выгрузки, отличающийся тем, что загрузочная горловина выполнена на боковой поверхности бункера, а рядом с ним с двух его сторон параллельно продольной оси бункера закреплены поворотные валики, охваченные гибким бесконечным полотном, наружная поверхность которого примыкает к наружной поверхности бункера, при этом валики расположены с обеспечением перекрытия полотном загрузочной горловины при ее вращении на участках траектории, отклоненных от верхнего положения - «загрузка».
Недостатком известного устройства является, отсутствие автономности, функционирование только при агрегатировании трактором, а также бортовой системы взвешивания загружаемого корма.
Известно техническое решение по патенту (NL2015909B1, МПК A01K5/00. Заявка поданная «Lely Patent Nv», опубликованная 30.06.2017 года.), это транспортное средство, для перемещения корма, включающее систему навигации, состоящее из GPS маяков или реперных точек определяющие траекторию движения транспортного средства, где в качестве рабочего органа, который обеспечивает перемещение кормовой смеси в зону досягаемости животных используется бамперное устройство в форме юбки вращающееся на валу в момент перемещения робота, который имеет электропривод.
Недостатком известного устройства является сложность конструкции, цилиндрический бампер в котором замкнут торец с одной из сторон, при выталкивания корма происходит засорения бампера изнутри, а также отсутствие бортовой системы взвешивания загружаемого корма и смесителя.
Известен подталкиватель кормов РЭЙНДЖЕР - управляемый робот, выполненный как цилиндрический корпус с внутренним расположением колес внутри корпуса (https://rovibecagrisolutions.com/en/produit/ranger-feed-pusher). Автономный робот подталкивает кормовую массу рациона в животноводческом помещении в сторону животных несколько раз в день. Автоматически адаптируется к нужной дистанции до грудного упора или надхолочного бруса или края кормового стола. Обеспечивает равномерное наличие корма по всей длине кормового фронта, уменьшает процент недоедающих коров, тем самым способствует увеличению надоя.
Недостатком известного устройства является низкая проходимость, отсутствие бортовой системы взвешивания загружаемого корма и смесителя.
Наиболее близким по технической сущности к заявляемому устройству, является устройство введения кормов в техническое поле «DeLaval OptiDuo™» реализуемого по патенту (International Publication Number WO 2019/035756, МПК А 01 К 5/02, 2019.). Устройство содержит датчик для измерения составляющих, физических, химических свойств кормов, накопительное устройство для хранения результатов физических и химических показателей свойств кормовой смеси, блок управления системой электропривода робота, шнек (винтовой толкатель), перемещающий кормовую смесь в зону досягаемости животных, защитный корпус.
Недостатком известного устройства является малая эффективность смешивания корма, ввиду выбранной формы шнека, блок управления роботом не производит оценку физиологических показателей животных в процессе обслуживания кормового стола, отсутствие возможности осуществления одновременного дозирование кормовых добавок во время движения устройства.
Технической задачей предлагаемого изобретения является повышение эффективности смешивания корма, учет оценки физиологических показателей животных в процессе обслуживания кормового стола и осуществление одновременного дозирования кормовых добавок.
Технический результат достигается тем, роботизированное устройство для обслуживания кормового стола на животноводческих комплексах, характеризующееся тем, что оно включает корпус, внутри которого расположен блок управления, приводные мотор-колеса, опорное колесо и аккумулятор, на корпусе размещен пульт управления и тензодатчики, на которые устанавливают накопительные бункеры, которые содержат засыпные горловины, шнеки дозаторы, шаговый электропривод и вал, при этом на торце вала закреплен лопастной смеситель, вал вращается посредством электропривода и ременной передачи, также на валу закреплен планетарный редуктор, на шестерню которого установлен винтовой толкатель, при этом вал закрыт защитным кожухом, а на передней части корпуса закреплен датчик сканирования.
Изобретение поясняется чертежами
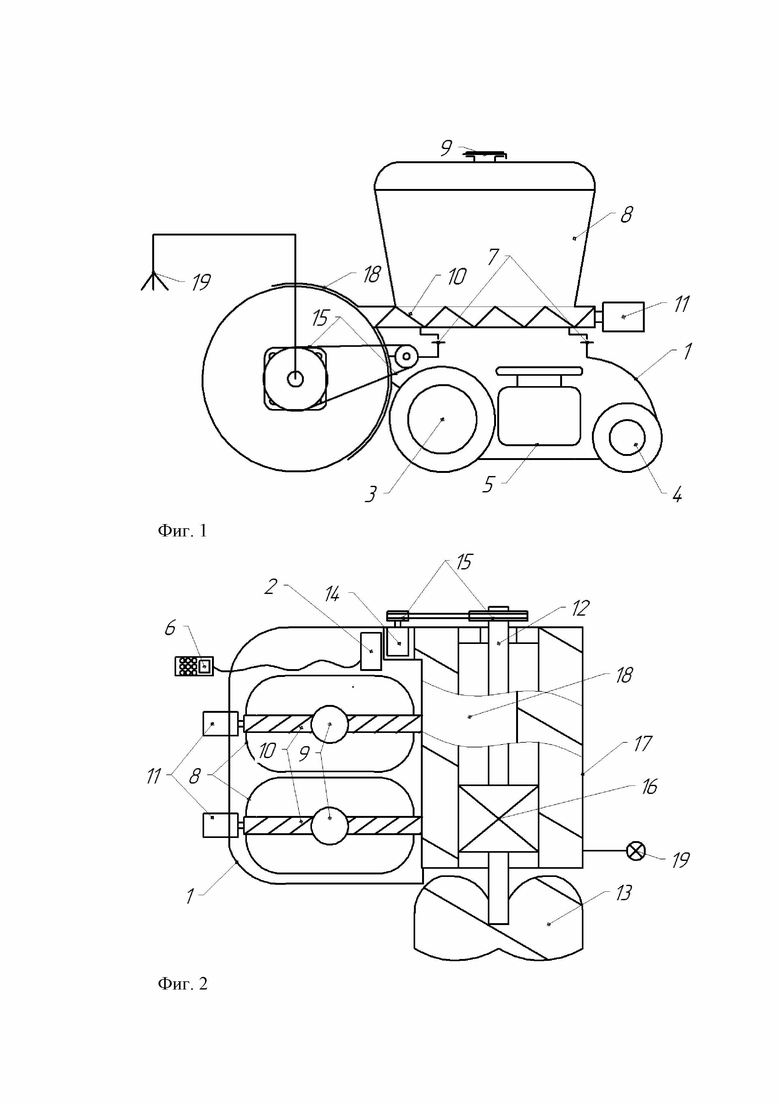
На фиг. 1 - принципиальная схема роботизированного устройства для обслуживания кормового стола на животноводческих комплексах; на фиг 2 - то же, вид сверху
Роботизированное устройство для обслуживания кормового стола на животноводческих комплексах содержит корпус 1, внутри которого устанавливается блок управления 2, приводные мотор-колеса 3, опорное колесо 4, аккумулятор 5.
На корпусе 1 размещены пульт управления 6, содержащий дисплей, и тензодатчики 7, на которые устанавливаются накопительные бункеры 8, которые содержат засыпные горловины 9, шнеки дозаторы 10, шаговый электропривод 11, вал 12. В передней части устройства размещен вал 12, на торце которого закреплен лопастной смеситель 13. Вал 12 вращается посредствам электропривода 14 и ременной передачи 15. На валу 12 закреплены солнечная шестерня (не показана) и планетарный редуктор 16, а на коронную шестерню (не показана) планетарного редуктора 16 установлен винтовой толкатель 17.
В передней части корпуса 1 закреплен защитный кожух 18 и датчик сканер 19.
Роботизированное устройство для обслуживания кормового стола на животноводческих комплексах работает следующим образом.
Миксер-раздатчик насыпает кормовую смесь на кормовой стол животноводческого комплекса.
Предварительно подзаряжают аккумулятор 5 устройства. Накопительные бункеры 8 автономно заполняют кормовыми добавками из кормового хранилища. Блок управления 2, отсчитывает время до момента начала движения устройства, а по завершении временного интервала подает команду «закрыть» на заслонки засыпных горловин 9, происходит их закрывание. Далее блок управления 2 устанавливает режим работы приводных мотор-колес 3, таким образом, что устройство движется вдоль ограждения кормового стола на животноводческом комплексе. Датчик-сканер 19, анализирует физические и химические показатели корма, а также его дальность разброса от ограждения кормового стола, предавая их на блок управления 2, который получает данные о физиологическом состоянии рядом стоящих животных с индивидуального датчика, нагрудного датчика или шагомера. Полученные данные служат для автоматического подбора параметров работы элементов устройства, а именно производительность шнеков дозаторов 10, угловая скорость и направление вращения вала 12, винтового толкателя 17, а также угловая скорость вращения приводных мотор-колес 3. Таким образом, перемещение вдоль ограждения кормового стола подразумевает дозирование различных кормовых добавок из накопительных бункеров 8, при этом дозируемые кормовые добавки попадают на спираль винтового толкателя 17 и перемещаются вместе с кормом, находящимся на кормовом столе, на лопастной смеситель 13 и смешиваются.
Блок управления 2 в зависимости от степени сопротивления оказываемого кормом на лопастной смеситель 13 и винтовой толкатель 17 изменяет их угловую скорость и направление посредствам электропривода 14, ременной передачи 15 и планетарного редуктора 16. Количество дозируемых кормовых добавок в процессе движения устройства может изменяться в зависимости от показателей датчика сканера 19 о количестве корма на кормовом столе и физиологического состояния животных. Для этого тензодатчики 7 оценивают динамические показатели расхода кормовых добавок и подают сигнал на блок управления 2 для корректировки работы шагового электропривода 11. Производительность винтового толкателя 17 и лопастного смесителя 13 зависит от количества корма на кормовом столе и удаленности от ограждения. Защитный кожух 18 предотвращает попадание корма с кормового стола внутрь корпуса 1. В случае аварийного режима автономной работы устройства блок управления 2 подает сигнал на смартфон оператора фермы или центральный компьютер, что позволяет оператору, используя пульт управления 6, скорректировать его работу и вывести систему из аварийного режима.
После завершения цикла обслуживания кормового стола устройство возвращается на место заряда аккумулятора 5. Блок управления 2 подает команду о прекращении вращения шагового электропривода 11, приводных мотор колес 3, электропривода 14, об открытии засыпных горловин 9. Происходит автономное наполнение накопительных бункеров 8, тензодатчики 7 отслеживают количество попавших внутрь кормовых добавок и при достижении верхнего порогового значения происходит завершение наполнения. В момент полного заряда аккумулятора 5 устройство готово к выполнению очередного цикла.
Содержание крупного рогатого скота на современных животноводческих комплексах предполагает включение концентрированных кормовых добавок в рацион кормления. Роботизированное устройство интегрируется с существующими системами управления стадом, роботизированными и автоматизированными системами доения.
Применение роботизированного устройства для обслуживания кормового стола на животноводческих комплексах позволит повысить эффективность смешивания корма, учесть физиологические показатели животных в процессе обслуживания кормового стола, осуществлять дозирование кормовых добавок и перемешивание их на кормовом столе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Роботизированный кормораздатчик | 2024 |
|
RU2821552C1 |
| Оптическая система управления процессом приготовления и раздачи кормовой смеси | 2023 |
|
RU2817884C1 |
| Роботизированная станция приготовления смесей для кормления животных | 2023 |
|
RU2818415C1 |
| Способ и устройство трёхстадийного измельчения, смешивания малоценного растительного сырья и пищевых отходов для приготовления высокопитательных кормовых добавок | 2017 |
|
RU2655214C1 |
| Установка производства фракционных смесей концентрированных кормов | 2019 |
|
RU2711595C1 |
| Мобильный кормосмеситель | 2017 |
|
RU2642122C1 |
| Смеситель-раздатчик кормов | 2018 |
|
RU2677792C1 |
| Мобильная установка для приготовления смеси лечебных комбикормов и премиксов в турбулентном потоке | 2021 |
|
RU2757721C1 |
| Роботизированное устройство для выпаивания поросят сосунов | 2019 |
|
RU2706204C1 |
| КОМБИКОРМОВЫЙ АГРЕГАТ | 2012 |
|
RU2492776C1 |
Изобретение относится к сельскому хозяйству, в частности механизация трудоемких процессов в животноводстве. Разработано роботизированное устройство для обслуживания кормового стола на животноводческом комплексе, характеризующееся тем, что оно включает корпус, внутри которого расположен блок управления, приводные мотор-колеса, опорное колесо и аккумулятор, на корпусе размещен пульт управления и тензодатчики, на которые устанавливают накопительные бункеры, которые содержат засыпные горловины, шнеки-дозаторы, шаговый электропривод и вал, при этом на торце вала закреплен лопастной смеситель, вал вращается посредством электропривода и ременной передачи, также на валу закреплен планетарный редуктор, на шестерню которого установлен винтовой толкатель, при этом вал закрыт защитным кожухом, а на передней части корпуса закреплен датчик сканирования. Изобретение позволяет повысить эффективность смешивания корма, учесть физиологические показатели животных в процессе обслуживания кормового стола, осуществлять дозирование кормовых добавок и перемешивание их на кормовом столе. 2 ил.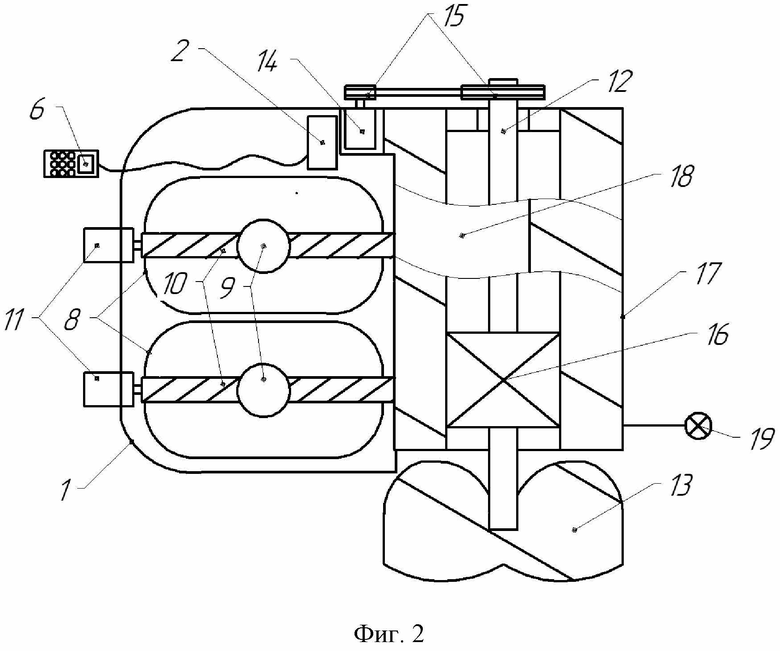
Роботизированное устройство для обслуживания кормового стола на животноводческом комплексе, характеризующееся тем, что оно включает корпус, внутри которого расположен блок управления, приводные мотор-колеса, опорное колесо и аккумулятор, на корпусе размещен пульт управления и тензодатчики, на которые устанавливают накопительные бункеры, которые содержат засыпные горловины, шнеки-дозаторы, шаговый электропривод и вал, при этом на торце вала закреплен лопастной смеситель, вал вращается посредством электропривода и ременной передачи, также на валу закреплен планетарный редуктор, на шестерню которого установлен винтовой толкатель, при этом вал закрыт защитным кожухом, а на передней части корпуса закреплен датчик сканирования.
| WO 2019035756 A1, 21.02.2019 | |||
| РАЗДАТЧИК КОРМА | 2015 |
|
RU2597967C1 |
| РАЗДАТЧИК-ИЗМЕЛЬЧИТЕЛЬ СТЕБЕЛЬЧАТЫХ КОРМОВ | 2013 |
|
RU2531324C1 |
| Смеситель-раздатчик кормов | 2018 |
|
RU2677792C1 |

