Изобретение относится к сельскому хозяйству и предназначено к использованию преимущественно на фермах КРС для приема, приготовления и раздачи кормовой смеси крупному рогатому скоту.
Известен роботизированный миксер-кормораздатчик, который состоит из бункера, вертикальных шнеков, раздаточного транспортера, кабины оператора (патент RU 2585043, МПК А01К 5/02, 2014).
Недостатком известного устройства являются большие габариты конструкции, наличие кабины оператора, высокие затраты энергии, раздача корма может осуществляться только вне помещений, низкая точность навигации, качество смешивания кормовой смеси определяется оператором.
Наиболее близким по технической сущности к заявляемому устройству является робот кормораздатчик Lely Vector, выпускаемый фирмой Lely Industries N.V. (www.lely.com), состоящий из бункера с одним вертикальным шнеком, перемещающейся платформы с двумя приводными колесами, выгрузного окна с дополнительным выгрузным шнеком, вращающейся юбки для пододвигания корма.
Недостатком известного устройства является отсутствие контроля приготовления кормовой смеси, низкая точность позиционирования, низкая скорость перемещения, низкая производительность. Приведенный кормораздатчик для навигации использует металлические полосы и ограждения, вследствие чего не может ориентироваться без них.
Технической задачей предлагаемого изобретения является повышение качества кормовой смеси, автономности автоматической раздачи корма, увеличение удоев КРС.
Техническим результатом предлагаемого изобретения является обеспечение крупного рогатого скота качественно приготовленной смесью и ее автономная, дозированная и своевременная раздача.
Вышеуказанный технический результат достигается тем, что в роботизированном кормораздатчике, состоящим из мобильной платформы в виде рамы с ходовой частью, имеющей колеса, на которых установлены электроприводы с тормозом, блока управления с управляющим контроллером, бункера хранения с смешивающим шнеком, контрножами и системой взвешивания согласно изобретению, интеллектуальный блок управления снабжен микрокомпьютером, системой навигации, системой технического зрения с датчиками в виде камер и программным обеспечением для определения качества приготовленной смеси, а смешивающий шнек снабжен специальными ножами с лезвиями эллипсоидной формы с волнистой кромкой, установленными на его витках.
Кроме того, внутренняя часть бункера снабжена магнитными пластинами, выгрузное окно снабжено выгрузным конвейером с заборным устройством, выгрузное окно снабжено выгрузным дозирующим шнеком, мобильная платформа снабжена датчиками лидар.
Сущность предлагаемого изобретения поясняется чертежами.
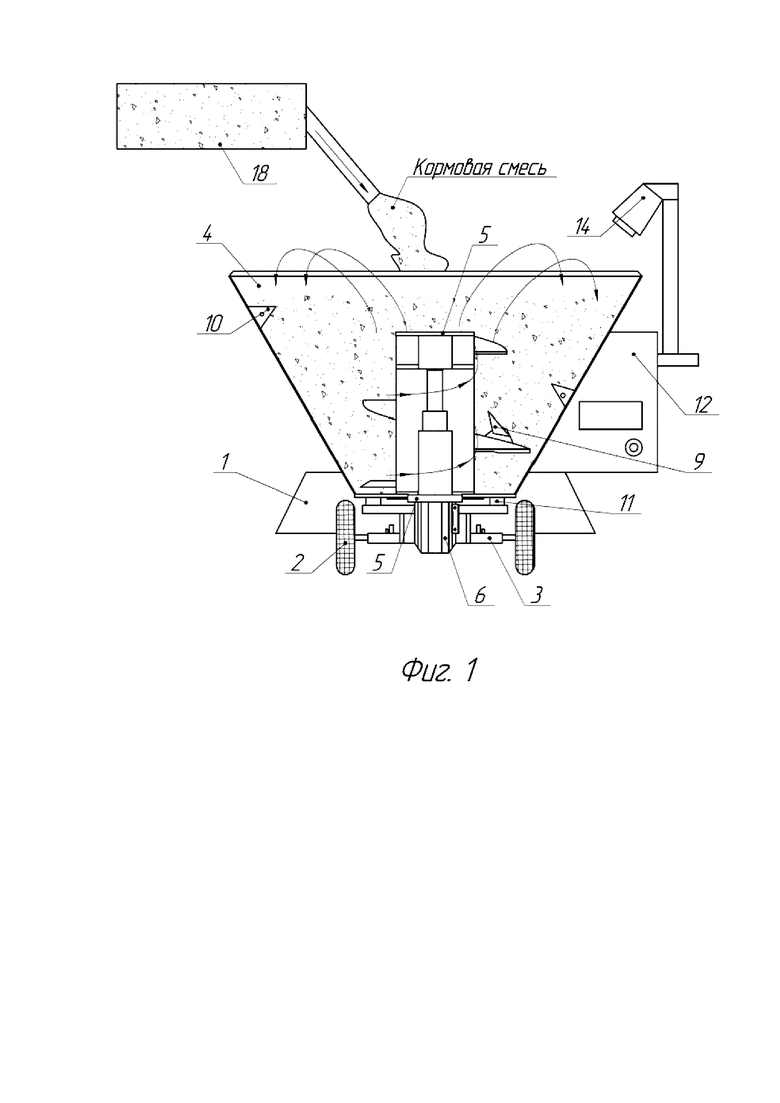
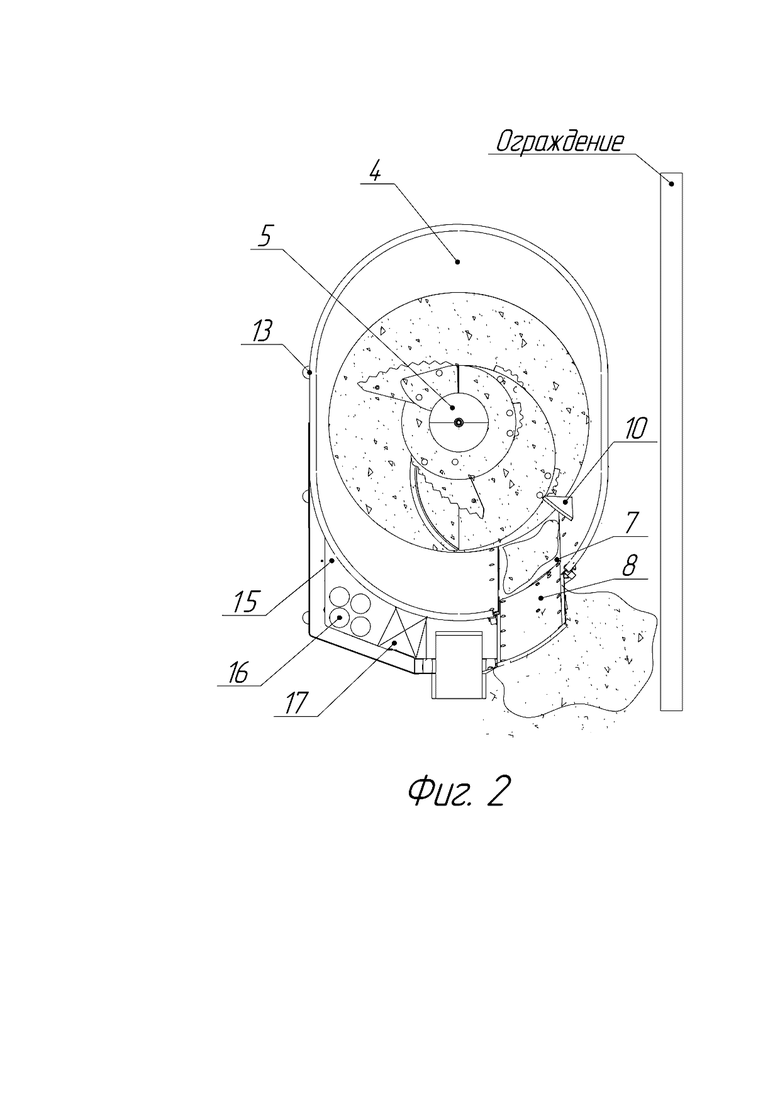
На фиг.1 представлена схема устройства спереди; на фиг.2 представлена схема устройства, вид сверху.
Роботизированный кормораздатчик содержит мобильную платформу 1 в виде металлического корпуса, снизу которого размещены колеса 2 из литой резины вместе с электроприводами 3. Хранение и смешивание кормовой смеси происходит в металлическом бункере 4. Бункер 4 - это сварная конструкция, состоящая из днища и боковых стенок. Днище бункера 4 имеет овальную форму, а боковые стенки конические. На внутренних стенках бункера 4 могут быть закреплены специальные магнитные пластины для снижения риска попадания инородных металлический тел в кормовую смесь, например, в результате износа бункера 4 или смешивающего шнека 5.
Внутри бункера 4 установлен стальной смешивающий шнек 5. По центру бункера 4 снизу установлен шнековый привод 6. Шнек 5 имеет конусную навивку витков, обеспечивающую смешивание компонентов преимущественно в горизонтальной плоскости. Он предназначен для измельчения и смешивания кормовых компонентов и подачи их к выгрузному окну 7.
Выгрузное окно 7 имеет шиберную заслонку 8, которая выполняет функцию регулятора выдачи кормовой смеси крупному рогатому скоту. Выгрузное окно 7 может быть дополнительно оснащено выгрузным конвейером с заборным устройством или выгрузным шнеком, предназначенными для улучшения точности дозирования кормовой смеси. На витках шнека 5 установлены специальные ножи 9 эллипсоидной формы с волнистой формой режущей кромки для обеспечения резания в разных плоскостях. В средней и в верхней части бункера 4 смонтированы контрножи (противоножи) 10, предназначенные для регулирования параметров смешивания и измельчения кормов.
Под бункером 4 размещена взвешивающая система, состоящая из набора тензодатчиков 11 и интеллектуального блока управления 12. Интеллектуальный блок управления 12 включает в себя систему навигации и технического зрения.
Система навигации содержит набор лазерных датчиков расстояния 13, расположенных на мобильной платформе 1. Мобильная платформа 1 может быть оснащена двумя датчиками лидар (на фиг. не показаны), расположенными на ней так, чтобы их область работы покрывала круговое пространство вокруг роботизированного кормораздатчика, и для навигации внутри помещения использован метод построения карты SLAM (Simultaneous Localization and Mapping). Система навигации использует систему технического зрения для определения местоположения робота. Система технического зрения включает датчики в виде камер 14 с необходимым программным обеспечением для определения качества приготовленной смеси. Внутри интеллектуального блока управления 12 находятся микрокомпьютер и контроллер, которые управляют приводами роботизированного кормораздатчика, датчиками 13 и 14 и работой всех его систем. На мобильной платформе 1 находится система питания, содержащая корпус 15, в котором установлены несколько аккумуляторов 16 и блок питания 17. Корпус 15 имеет разъем для зарядки роботизированного кормораздатчика на зарядной станции.
Устройство работает следующим образом.
Перед началом работы в интеллектуальный блок управления 12 автоматически загружают данные с рационами и режимами питания определенных групп коров, которые содержатся в общей базе рационов фермы, составленной зоотехниками. Процесс начинается с загрузки кормов из трубопровода 18 (силос, сенаж, стебельчатые корма, концентраты и минералы) и лекарственных добавок в бункер 4 роботизированного кормораздатчика.
Контроль процесса загрузки кормов осуществляет система взвешивания роботизированного кормораздатчика, которая включает набор тензодатчиков 11 и коммутационных связей, установленных под дном бункера 4. Взвешивающая система определяет массу загружаемого в бункер корма, после достижения заданного значения массы корма, на кормовую кухню поступает сигнал остановки процесса загрузки кормов.
Шнековый привод 6, расположенный в нижней части бункера 4, передает крутящий момент измельчающему шнеку 5. Для резания в разных плоскостях и доизмельчения кормовой массы по всей длине витка измельчающего шнека 5 установлены специальные ножи 9 эллипсоидной формы с волнистой кромкой лезвий. Загружаемая сверху кормовая масса затягивается шнеком 5 и измельчается с помощью установленных на нем ножей 9. Кормовая масса приподнимается вертикальным шнеком 5 вверх, а затем свободно сползает вниз по коническим стенка бункера 3. Зазор между шнеком 5 и стенками бункера 4 обеспечивает качественное приготовление загружаемых кормовых компонентов без повреждения их структуры, слипания или образования комков. В результате выполнения этой технологической операции происходит быстрое перемешивание кормовых составляющих и получается рыхлая однородная кормовая смесь. Для ускорения процесса измельчения, а также предотвращения проворачивания кормовой смеси и наматывания длинноволокнистых кормов на шнек 5 в бункере 4 установлены два контрножа 10. Контрножи 10 выдвигаются за счет линейных приводов, установленных снаружи бункера 4. Количество контрножей 10 зависит от объема бункера 4.
Одновременно с процессом перемешивания кормовой смеси роботизированный кормораздатчик начинает перемещение по ферме. Движение кормораздатчика осуществляется за счет приводов 3, установленных на его колесах 2.
Перед началом движения система технического зрения в виде камеры 14 считывает начальную метку, из которой получает информацию о своем местоположении и траектории движения до цели (коровника). Она осуществляет контроль за качеством приготовленной смеси. Для получения снимков видеосенсором во время процесса смешивания привод 6 останавливает шнек 5. Система технического зрения, используя алгоритм на основе нейронной сети, обрабатывает эти данные и получает информацию о качестве приготовленной смеси. Исходя из полученных результатов регулируется скорость шнека 5. При перемещении до коровника роботизированный кормораздатчик избегает динамические препятствия используя датчики расстояния 13.
Добравшись до точки назначения, роботизированный кормораздатчик, используя систему технического зрения, должен считать финальную метку и получить информацию о своем местоположении и начале кормового стола. Перед началом раздачи кормораздатчик проверяет качество кормовой смеси в бункере 4 и начинает раздачу только после завершения процесса приготовления. Раздача кормовой смеси осуществляется с помощью шнека 5, который направляет кормовую массу в сторону выгрузного окна 7. Дозирование кормовой смеси регулируется за счет шиберной заслонки 8, скорости вращения шнека 5 и скорости движения кормораздатчика. Для регулирования этих параметров в интеллектуальный блок управления 12 поступает полученная от тензодатчиков 11 информация о количестве выданной смеси. После раздачи кормовой смеси всем группам коров роботизированный кормораздатчик, используя камеру 14, получает информацию об остатках корма на кормовом столе и благодаря обтекаемой форме мобильной платформы 1 может сдвинуть корма ближе к коровам.
Использование предложенного устройства позволит повысить автономность автоматической раздачи корма, улучшить качество кормовой смеси, увеличить производительность крупного рогатого скота.
| название | год | авторы | номер документа |
|---|---|---|---|
| Роботизированная станция приготовления смесей для кормления животных | 2023 |
|
RU2818415C1 |
| Оптическая система управления процессом приготовления и раздачи кормовой смеси | 2023 |
|
RU2817884C1 |
| Система для оценки качества корма животных | 2021 |
|
RU2775170C1 |
| Роботизированное устройство для обслуживания кормового стола на животноводческих комплексах | 2020 |
|
RU2747167C1 |
| СИСТЕМА УПРАВЛЕНИЯ РОБОТИЗИРОВАННЫМ МИКСЕРОМ-КОРМОРАЗДАТЧИКОМ | 2014 |
|
RU2585043C2 |
| Смеситель-раздатчик кормов | 2018 |
|
RU2677792C1 |
| Способ раздачи зерновой смеси крупному рогатому скоту на откорме | 2022 |
|
RU2791733C1 |
| Многофункциональный измельчитель - раздатчик кормов | 2019 |
|
RU2714731C1 |
| Раздатчик кормов | 2020 |
|
RU2747732C1 |
| Самозагружающийся раздатчик кормов | 2022 |
|
RU2780232C1 |
Изобретение относится к сельскому хозяйству. Роботизированный кормораздатчик состоит из мобильной платформы, системы хранения, смешивания и раздачи кормовой смеси, интеллектуального блока управления и системы электропитания. Мобильная платформа выполнена в виде рамы с ходовой частью с колесами, на которых установлены электроприводы с тормозом. Интеллектуальный блок управления снабжен микрокомпьютером, системой навигации, системой технического зрения с датчиками в виде камер и программным обеспечением для определения качества приготовленной смеси. Смешивающий шнек снабжен ножами с лезвиями эллипсоидной формы с волнистой кромкой, установленными на его витках. Изобретение обеспечивает автономность устройства и контроль качества кормовой смеси. 4 з.п. ф-лы, 2 ил.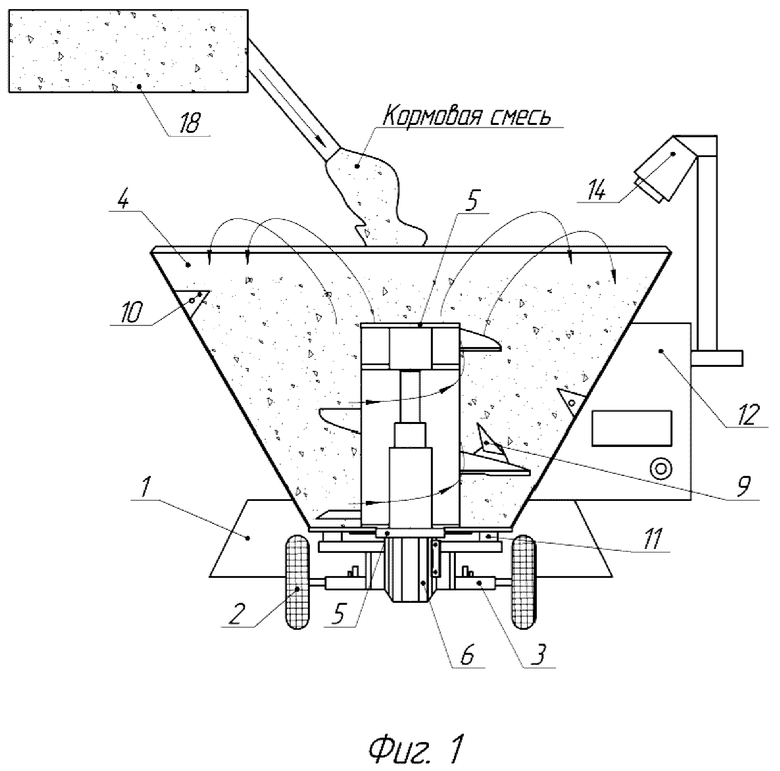
1. Роботизированный кормораздатчик, состоящий из мобильной платформы в виде рамы с ходовой частью, имеющей колеса, на которых установлены электроприводы с тормозом, блока управления с управляющим контроллером, бункера хранения с смешивающим шнеком, контрножами и системой взвешивания, отличающийся тем, что интеллектуальный блок управления снабжен микрокомпьютером, системой навигации, системой технического зрения с датчиками в виде камер и программным обеспечением для определения качества приготовленной смеси, а смешивающий шнек снабжен ножами с лезвиями эллипсоидной формы с волнистой кромкой, установленными на его витках.
2. Роботизированный кормораздатчик по п. 1, отличающийся тем, что внутренняя часть бункера снабжена магнитными пластинами.
3. Роботизированный кормораздатчик по п. 1, отличающийся тем, что выгрузное окно снабжено выгрузным конвейером с заборным устройством.
4. Роботизированный кормораздатчик по п. 1, отличающийся тем, что выгрузное окно снабжено выгрузным, дозирующим шнеком.
5. Роботизированный кормораздатчик по п. 1, отличающийся тем, что мобильная платформа снабжена датчиками лидар.
| СИСТЕМА УПРАВЛЕНИЯ РОБОТИЗИРОВАННЫМ МИКСЕРОМ-КОРМОРАЗДАТЧИКОМ | 2014 |
|
RU2585043C2 |
| ТРАНСПОРТЕР К ЧЕСАЛЬНЫМ, ТРЕПАЛЬНЫМ И Т. П. МАШИНАМ | 1946 |
|
SU70088A1 |
| WO 2009060442 A2, 14.05.2009. | |||

