УРОВЕНЬ ТЕХНИКИ, К КОТОРОМУ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Область техники, к которой относится изобретения
[0001] Настоящее изобретение относится, в общем, к обнаружению препятствий для способных двигаться устройств и, в частности, к способу обнаружения низкопрофильного объекта радиочастотным (РЧ) датчиком и РЧ датчику.
Описание предшествующего уровня техники
[0002] В настоящее время в робототехнике широко применяется обнаружение объектов. Существуют технические решения, которые обнаруживают объекты с помощью лидара, оптического датчика, использующего структурированный свет, ультразвукового датчика, радиочастотного датчика, например, такого как сканирующий радар миллиметрового диапазона длин волн и т.д. Известные технические решения способны обнаруживать высокопрофильные объекты с высоким разрешением. Такие технические решения известны, например, из нижеприведенных источников.
[0003] В публикации патентной заявки US 20160274580 A1, опубликованной 22.09.2016, озаглавленной «CLEANING ROBOT» предложен робот-уборщик, содержащий блок обнаружения находящегося впереди препятствия, выполненный с возможностью передачи радиоволны в направлении вперед относительно основного корпуса робота и обнаружения радиоволны, отраженной от находящегося впереди препятствия; и контроллер, выполненный с возможностью обнаружения информации о местоположении находящегося впереди препятствия на основе отраженной радиоволны, при этом блок обнаружения находящегося впереди препятствия содержит по меньшей мере два радиолокационных датчика сверхширокополосного диапазона, выполненных с возможностью передачи радиоволны в виде импульсов. Однако, предложенное техническое решение не обеспечивает обнаружение низкопрофильных объектов и не имеет защиты от ложных срабатываний/обнаружений объектов путем фильтрации фонового шума и различения подпольных и надпольных объектов.
[0004] В публикации патентной заявки US 20170023661 A1, опубликованной 26.01.2017, озаглавленной «APPARATUS AND METHODS FOR DETECTION OF OBJECTS USING BROADBAND SIGNALS» предложено техническое решение, в котором широкополосные передачи сигнала могут использоваться для обнаружения объекта и/или определения расстояния до объекта. Широкополосные передачи могут содержать псевдослучайную битовую последовательность или битовую последовательность, сформированную с использованием случайного процесса. Последовательность может использоваться для модуляции передач данного типа волны. Могут использоваться различные типы волн: механические, световые и радиоволны. Волны, отражаемые объектами в пределах объема обнаружения, могут быть собраны. Принятый сигнал может быть свернут с обращенной во времени копией переданной случайной последовательности, чтобы получить коррелограмму. Коррелограмма может быть проанализирована для определения дальности до объектов. Анализ может включать в себя определение одного или нескольких пиков/спадов в коррелограмме. Дальность до объекта может быть определена на основе временной задержки соответствующего пика. Однако, предложенное техническое решение не обеспечивает обнаружение низкопрофильных объектов и не имеет защиты от ложных срабатываний/обнаружений объектов путем фильтрации фонового шума и различения подпольных и надпольных объектов.
[0005] Известные технические решения не могут обнаруживать низкопрофильные объекты, такие как разлитая на поверхности жидкость, кабели, провода, трубы и т.д., что может затруднять передвижение способного двигаться устройства, такого как робот. Кроме того, передвижение устройства может быть затруднено за счет ложных обнаружений объектов, вызванных фоновым шумом и наличием подпольных объектов, таких как трубы, провода, кабели, металлические конструкции и т.д., находящиеся под поверхностью, по которой передвигается устройство.
[0006] Настоящее изобретение создано для устранения по меньшей мере одной из вышеописанных проблем и недостатков и для обеспечения по меньшей мере одного из нижеприведенных преимуществ.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0007] Целью настоящего изобретения является обеспечение способа обнаружения низкопрофильного объекта РЧ датчиком и РЧ датчик, которые позволяют получить по меньшей мере одно из следующих преимуществ:
- обнаружение низкопрофильных объектов;
- устранение ложных обнаружений объектов, вызванных фоновым шумом и наличием подпольных объектов.
[0008] Один аспект настоящего изобретения обеспечивает способ обнаружения низкопрофильного объекта радиочастотным (РЧ) датчиком, установленным на способном двигаться устройстве, причем упомянутый способ содержит: этап (101), на котором испускают передатчиком по меньшей мере одного радара широкополосные РЧ сигналы; этап (102), на котором принимают отраженные от объекта РЧ сигналы приемником по меньшей мере одного радара; этап (103), на котором формируют набор отраженных РЧ сигналов, содержащий заранее заданное количество отраженных РЧ сигналов, причем упомянутый набор содержит отраженные РЧ сигналы в порядке их приема; этап (104), на котором оцифровывают набор отраженных РЧ сигналов, причем каждый оцифрованный РЧ сигнал в упомянутом наборе представляет собой последовательность отсчетов; этап (105), на котором вычисляют частоту среза для фильтра низких частот; этап (106), на котором формируют объединенный сигнал из набора оцифрованных РЧ сигналов, причем объединенный сигнал представляет собой матрицу, состоящую из набора оцифрованных РЧ сигналов, в которой каждый столбец матрицы представляет собой последовательность отсчетов оцифрованного РЧ сигнала, в первой строке матрицы находится первый отчет каждого оцифрованного РЧ сигнала из набора, и оцифрованные РЧ сигналы в матрице расположены в порядке их приема; этап (107), на котором удаляют фоновый шум и вклад в сигнал объекта, находящегося под поверхностью, по которой движется упомянутое устройство, посредством построчной фильтрации объединенного сигнала фильтром низких частот с вычисленной частотой среза, при этом фильтрация применяется отдельно к каждой строке упомянутой матрицы; этап (108), на котором формируют результирующий сигнал из отфильтрованного объединенного сигнала посредством суммирования отсчетов в каждой строке матрицы отфильтрованного объединенного сигнала; этап (109), на котором вычисляют полную энергию результирующего сигнала посредством суммирования его отсчетов; этап (110), на котором обнаруживают объект посредством сравнения полной энергии с заранее заданным пороговым значением, при этом если полная энергия выше заранее заданного порогового значения, то объект обнаружен; и этап (111), на котором исключают из упомянутого набора РЧ сигнал, принятый раньше других в упомянутом наборе, и включают в упомянутый набор РЧ сигнал, принятый сразу после РЧ сигнала, принятого последним в упомянутом наборе, и выполняют этапы (101)-(110).
[0009] В дополнительном аспекте способ может дополнительно содержать этап, на котором определяют скорость упомянутого устройства и вычисляют расстояние от упомянутого устройства до объекта с использованием скорости упомянутого устройства.
[0010] В другом дополнительном аспекте на этапе (103) испускают передатчиками по меньшей мере двух радаров широкополосные РЧ сигналы, и на этапе (104) принимают отраженные РЧ сигналы приемниками по меньшей мере двух радаров, при этом упомянутый способ дополнительно содержит этапы, на которых: определяют направление на объект упомянутого устройства с использованием отраженных РЧ сигналов; и корректируют частоту среза фильтра низких частот.
[0011] В еще одном дополнительном аспекте способ может дополнительно содержать этап, на котором вычисляют местоположение объекта относительно упомянутого устройства с использованием скорости упомянутого устройства и угла между направлением на объект и направлением движения упомянутого устройства.
[0012] В еще одном дополнительном аспекте способ может дополнительно содержать этап, на котором обнаруживают объект по меньшей мере одним дополнительным датчиком, причем по меньшей мере один дополнительный датчик представляет собой одно из камеры, времяпролетной камеры, камеры со структурированной подсветкой, ультразвукового датчика и емкостного датчика.
[0013] Другой аспект настоящего изобретения обеспечивает радиочастотный (РЧ) датчик для обнаружения объекта, установленный на способном двигаться устройстве, причем РЧ датчик содержит: по меньшей мере один радар, причем каждый радар содержит передатчик и приемник, при этом передатчик выполнен с возможностью (101) испускать широкополосные РЧ сигналы, и приемник выполнен с возможностью (102) принимать отраженные от объекта РЧ сигналы; и процессор, выполненный с возможностью выполнять следующие операции: (103) формировать набор отраженных РЧ сигналов, содержащий заранее заданное количество отраженных РЧ сигналов, причем упомянутый набор содержит отраженные РЧ сигналы в порядке их приема, (104) оцифровывать набор отраженных РЧ сигналов, причем каждый оцифрованный РЧ сигнал в упомянутом наборе представляет собой последовательность отсчетов, (105) вычислять частоту среза для фильтра низких частот, (106) формировать объединенный сигнал из набора оцифрованных РЧ сигналов, причем объединенный сигнал представляет собой матрицу, состоящую из набора оцифрованных РЧ сигналов, в которой каждый столбец матрицы представляет собой последовательность отсчетов оцифрованного РЧ сигнала, в первой строке матрицы находится первый отчет каждого оцифрованного РЧ сигнала из набора, и оцифрованные РЧ сигналы в матрице расположены в порядке их приема, (107) удалять фоновый шум и вклад в сигнал объекта, находящегося под поверхностью, по которой движется упомянутое устройство, посредством построчной фильтрации объединенного сигнала фильтром низких частот с вычисленной частотой среза, при этом фильтрация применяется отдельно к каждой строке упомянутой матрицы, (108) формировать результирующий сигнал из отфильтрованного объединенного сигнала посредством суммирования отсчетов в каждой строке матрицы отфильтрованного объединенного сигнала, (109) вычислять полную энергию результирующего сигнала посредством суммирования его отсчетов, (110) обнаруживать объект посредством сравнения полной энергии с заранее заданным пороговым значением, при этом если полная энергия выше заранее заданного порогового значения, то объект обнаружен, (111) исключать из упомянутого набора РЧ сигнал, принятый раньше других в упомянутом наборе, и включать в упомянутый набор РЧ сигнал, принятый сразу после РЧ сигнала, принятого последним в упомянутом наборе, и выполнять операции (101)-(110).
[0014] В дополнительном аспекте процессор может быть дополнительно выполнен с возможностью определять скорость упомянутого устройства и вычислять расстояние от упомянутого устройства до объекта с использованием скорости упомянутого устройства.
[0015] В другом дополнительном аспекте РЧ датчик может содержать по меньшей мере два радара, при этом передатчики по меньшей мере двух радаров испускают широкополосные РЧ сигналы, и приемники по меньшей мере двух радаров принимают отраженные РЧ сигналы, и при этом процессор дополнительно выполнен с возможностью выполнять следующие операции: определять направление на объект упомянутого устройства с использованием отраженных РЧ сигналов; и корректировать частоту среза фильтра низких частот.
[0016] В еще одном дополнительном аспекте процессор может быть дополнительно выполнен с возможностью вычислять местоположение объекта относительно упомянутого устройства с использованием скорости упомянутого устройства и угла между направлением на объект и направлением движения упомянутого устройства.
[0017] В еще одном дополнительном аспекте РЧ датчик может дополнительно содержать по меньшей мере один дополнительный датчик для обнаружения объекта, причем по меньшей мере один дополнительный датчик представляет собой одно из камеры, времяпролетной камеры, камеры со структурированной подсветкой, ультразвукового датчика и емкостного датчика.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0018] Вышеописанные и другие аспекты, признаки и преимущества настоящего изобретения будут более понятны из последующего подробного описания, приведенного в сочетании с прилагаемыми чертежами, на которых:
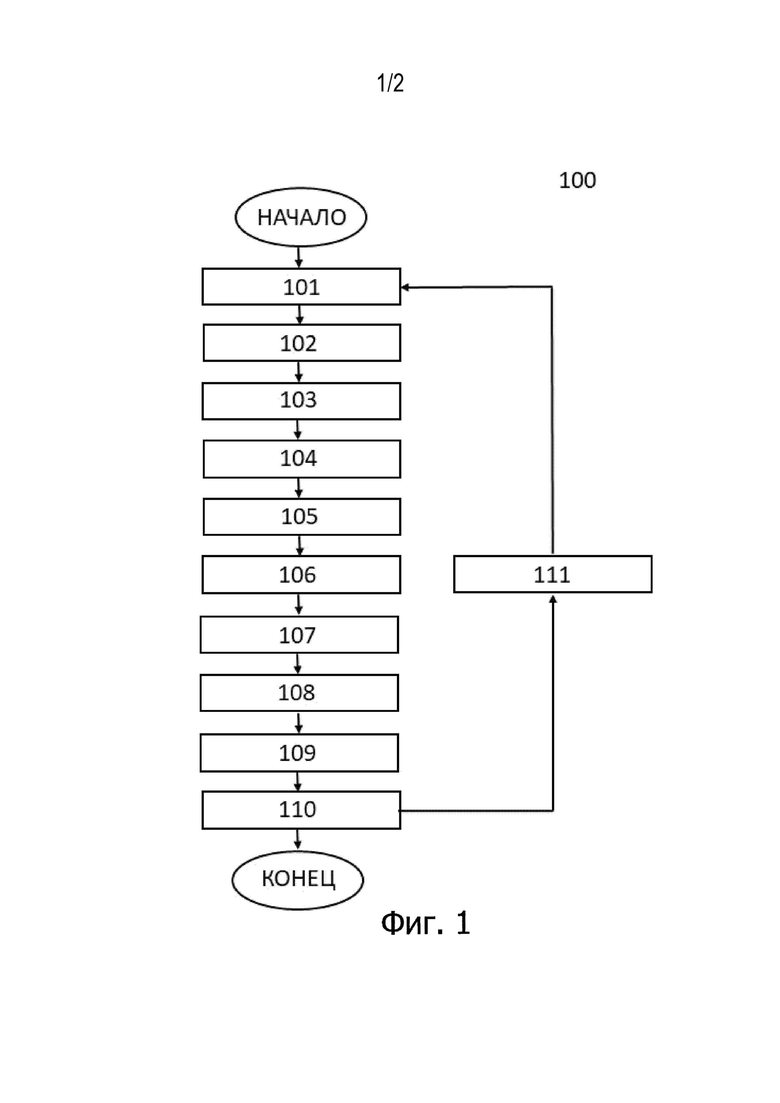
[0019] Фиг. 1 изображает блок-схему последовательности операций одного варианта осуществления способа обнаружения низкопрофильного объекта радиочастотным (РЧ) датчиком.
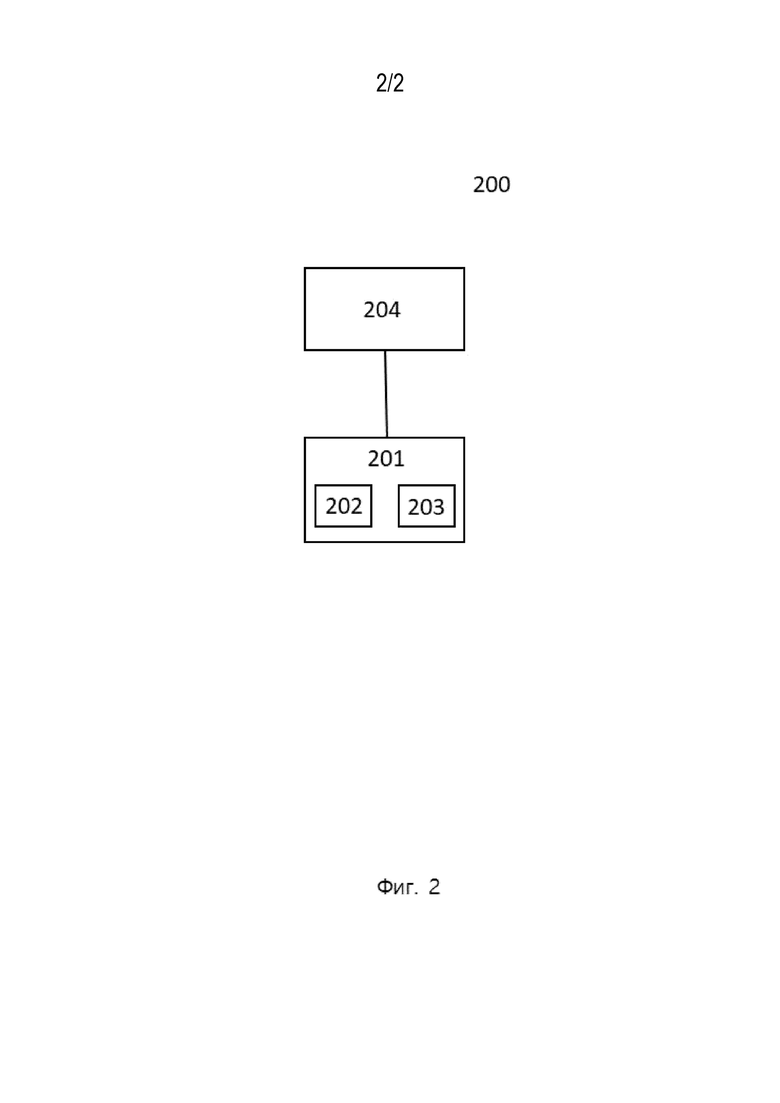
[0020] Фиг. 2 изображает блок-схему одного варианта осуществления РЧ датчика.
[0021] В последующем описании, если не указано иное, одинаковые ссылочные позиции используются для одинаковых элементов, когда они изображены на разных чертежах, и их параллельное описание не приводится.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
[0022] Нижеследующее описание со ссылкой прилагаемые чертежи приведено, чтобы облегчить полное понимание различных вариантов осуществления настоящего изобретения, заданного формулой изобретения, и его эквивалентов. Описание включает в себя различные конкретные подробности, чтобы облегчить такое понимание, но данные подробности следует считать только примерными. Соответственно, специалисты в данной области техники обнаружат, что можно разработать различные изменения и модификации различных вариантов осуществления, описанных в настоящей заявке, без выхода за пределы объема настоящего изобретения. Кроме того, описания общеизвестных функций и конструкций могут быть исключены для ясности и краткости.
[0023] Термины и формулировки, используемые в последующем описании и формуле изобретения не ограничены библиографическим значениями, а просто использованы создателем настоящего изобретения, чтобы обеспечить четкое и последовательное понимание настоящего изобретения. Соответственно, специалистам в данной области техники должно быть ясно, что последующее описание различных вариантов осуществления настоящего изобретения предлагается только для иллюстрации.
[0024] Следует понимать, что формы единственного числа включают в себя множественность, если контекст явно не указывает иное.
[0025] Дополнительно следует понимать, что термины «содержит», «содержащий», «включает в себя» и/или «включающий в себя», при использовании в настоящей заявке, означают присутствие изложенных признаков, значений, операций, элементов и/или компонентов, но не исключают присутствия или добавления одного или более других признаков, значений, операций, элементов, компонентов и/или их групп.
[0026] В дальнейшем, различные варианты осуществления настоящего изобретения описаны более подробно со ссылкой на прилагаемые чертежи.
[0027] Настоящее изобретение предназначено для обнаружения объектов радиочастотным (РЧ) датчиком и обеспечивает обнаружение низкопрофильных объектов, таких как разлитая на поверхности жидкость, кабели, провода, трубы и т.д., и устранение ложных обнаружений объектов, вызванных фоновым шумом и наличием подпольных объектов. Низкопрофильными объектами являются объекты, имеющие высоту менее 1 см. Подпольными объектами могут быть трубы, провода, кабели, металлические конструкции и т.д., находящиеся под поверхностью, по которой передвигается устройство.
[0028] Обнаружение низкопрофильных объектов невозможно выполнить известными способами, которые хорошо работают, когда расстояние от РЧ датчика до объекта намного больше, чем расстояние от передатчика РЧ датчика до приемника РЧ датчика. При таком условии отражения РЧ сигнала от разных точек объекта поступают на приемник по существу одновременно и формируют суммарный отраженный сигнал с одним большим пиком, указывающим на наличие объекта.
[0029] В случае низкопрофильного объекта, такого как провод, кабель или труба, у которого ширина намного больше, чем высота, и при условии, что расстояние от РЧ датчика до объекта сопоставимо с расстоянием от передатчика РЧ датчика до приемника РЧ датчика и шириной объекта, отражения РЧ сигнала от разных точек объекта поступают на приемник в разное время и формируют суммарный отраженный сигнал с несколькими малыми пиками. Отраженный сигнал с несколькими малыми пиками может быть принят, например, за фоновый шум и не обеспечить обнаружение объекта.
[0030] Настоящее изобретение обеспечивает обнаружение объектов при обоих вышеприведенных условиях за счет особой обработки сигналов до фильтрации, фильтрации обработанных сигналов и вычисления полной энергии отфильтрованного сигнала.
[0031] Настоящее изобретение может быть использовано в любом устройстве, для работы которого необходимо обнаружение объектов. Например, такими устройствами могут быть устройства, способные двигаться в автоматическом режиме. Обнаружение низкопрофильных объектов и устранение ложных обнаружений объектов позволяет устройствам избегать столкновений с объектами и обеспечивает стабильное и безаварийное перемещение устройства, при этом нет необходимости в предварительной подготовке помещений для устранения объектов, например, низкопрофильных объектов, мешающих перемещению устройства.
[0032] Кроме того, настоящее изобретение может быть использовано для составления плана/карты помещения с отображением находящихся в помещении объектов, в том числе и низкопрофильных объектов.
[0033] Использование дополнительных датчиков может обеспечить распознавание объектов. Например, робот-пылесос может определять с помощью камеры, установленной не нем, тип низкопрофильного объекта, являющегося загрязнением и подлежащего уборке. В зависимости от типа низкопрофильного объекта робот-пылесос может выбирать режим уборки, например, режим сухой уборки, если низкопрофильный объект является сухим мусором, или режим влажной уборки, если низкопрофильный объект является лужей жидкости. Кроме того, робот-пылесос может фотографировать камерой обнаруженный объект и отправлять, например, на смартфон пользователя изображение обнаруженного объекта, чтобы пользователь задал дальнейшие действия робота-пылесоса.
[0034] Материал поверхности, по которой перемещается способное двигаться устройство, влияет на интенсивность фонового шума и вклад подпольного объекта в отраженный сигнал. Способное двигаться устройство с помощью камеры или другого датчика, установленных не нем, может определять изменение материала поверхности, по которой оно перемещается, и вызывать пересчет параметров, используемых при обнаружении объекта, для увеличения точности обнаружения объекта и устранения ложных обнаружений объектов, вызванных сменой материала поверхности перемещения.
[0035] Один вариант осуществления способа 100 обнаружения низкопрофильного объекта радиочастотным (РЧ) датчиком, установленным на способном двигаться устройстве, описан со ссылкой на фиг. 1.
[0036] На этапе 101 испускают передатчиком по меньшей мере одного радара широкополосные РЧ сигналы.
[0037] На этапе 102 принимают отраженные от объекта РЧ сигналы приемником по меньшей мере одного радара.
[0038] На этапе (103) формируют набор отраженных РЧ сигналов из принятых отраженных РЧ сигналов в порядке их приема. Количество отраженных РЧ сигналов в наборе задано заранее.
[0039] На этапе (104) оцифровывают набор отраженных РЧ сигналов, причем каждый оцифрованный РЧ сигнал в упомянутом наборе представляет собой последовательность отсчетов. Оцифровка РЧ сигналов посредством их дискретизации и преобразование выборок в цифровую форму для получения последовательности отсчетов широко известна в уровне техники, поэтому подробное описание оцифровки РЧ сигналов не требуется.
[0040] На этапе (105) вычисляют частоту среза для фильтра низких частот. Частоту среза для фильтра низких частот вычисляют с использованием оцифрованных сигналов.
[0041] На этапе (106) формируют объединенный сигнал из набора РЧ сигналов, оцифрованных на этапе (104). Объединенный сигнал представляет собой матрицу, состоящую из набора оцифрованных РЧ сигналов, в которой каждый столбец матрицы представляет собой последовательность отсчетов оцифрованного РЧ сигнала. В первой строке матрицы находится первый отчет каждого оцифрованного РЧ сигнала из набора. Оцифрованные РЧ сигналы в матрице расположены в порядке их приема.
[0042] На этапе (107) удаляют фоновый шум и вклад в сигнал объекта, находящегося под поверхностью, по которой движется упомянутое устройство. Этап (107) выполняют посредством построчной фильтрации объединенного сигнала, сформированного на этапе (106), фильтром низких частот с частотой среза, вычисленной на этапе (105). Фильтрация применяется отдельно к каждой строке упомянутой матрицы. В качестве фильтра низких частот может применяться любой известный цифровой фильтр низких частот, например, такой как фильтр Чебышева, эллиптический фильтр, фильтр Бесселя, фильтр Баттерворта. Предпочтительным является фильтр Баттерворта, спроектированный так, чтобы его амплитудно-частотная характеристика была максимально гладкой на частотах полосы пропускания.
[0043] На этапе (108) формируют результирующий сигнал из объединенного сигнала, отфильтрованного на этапе (107). Результирующий сигнал получают посредством суммирования отсчетов в каждой строке матрицы отфильтрованного объединенного сигнала.
[0044] На этапе (109) вычисляют полную энергию результирующего сигнала, сформированного на этапе (108) посредством суммирования отсчетов результирующего сигнала.
[0045] На этапе (110) выполняют обнаружение объекта посредством сравнения полной энергии, вычисленной на этапе (109) с заранее заданным пороговым значением. Объект обнаружен, если полная энергия выше заранее заданного порогового значения. Пороговое значение вычисляется эмпирически на этапе заводского тестирования устройства для разных материалов поверхности, по которой движется устройство. Перед работой устройства пользователь может выбрать пороговое значение, соответствующее материалу поверхности, в настройках устройства и таким образом задать пороговое значение. Также устройство может автоматически выставить пороговое значение двигаясь некоторое время по поверхности, на которой отсутствуют препятствия. При автоматической установке порогового значения устройство, на котором установлен РЧ датчик, располагают в области пространства, на расстоянии 0,5 м-1 м от которой нет препятствии/объектов, что обеспечивает получение РЧ сигналов, не содержащих вклад объекта. Устройство перемещается в пределах этой области пространства. При перемещении устройство выполняет этапы (101)-(111) способа 100 обнаружения низкопрофильного объекта РЧ датчиком. Полная энергия, полученная при перемещении устройства пределах области пространства, на расстоянии 0,5м-1м от которой нет препятствии/объектов, и выполнении этапов (101)-(111), устанавливается в качестве порогового значения.
[0046] На этапе (111) исключают из упомянутого набора РЧ сигнал, принятый раньше других в упомянутом наборе, и включают в упомянутый набор РЧ сигнал, принятый сразу после РЧ сигнала, принятого последним в упомянутом наборе, и выполняют этапы (101)-(110).
[0047] Чтобы еще уменьшить вероятность ложного срабатывания или вероятность необнаружения объекта каждый набор отраженных РЧ сигналов может быть обработан несколько раз путем последовательного выполнения этапов 104-110. Неоднократная обработка набора отраженных РЧ сигналов позволяет улучшить соотношение сигнал/шум за счет усреднения, и, тем самым, дополнительно улучшить устранение фонового шума.
[0048] В другом варианте осуществления способ 100 обнаружения низкопрофильного объекта РЧ датчиком может дополнительно содержать этап, на котором определяют скорость способного двигаться устройства, на котором установлен РЧ датчик, и вычисляют расстояние от устройства, на котором установлен РЧ датчик, до объекта с использованием скорости устройства, на котором установлен РЧ датчик. Определение скорости может быть выполнено путем получения данных о скорости от способного двигаться устройства или любым известным в уровне техники способом. Вычисление расстояния до объекта с помощью испускания сигналов и приема сигналов, отраженных от объекта, широко известно в радиолокации и, поэтому, подробного описания этой операции не требуется.
[0049] В еще одном варианте осуществления способа 100 обнаружения низкопрофильного объекта РЧ датчиком на этапе (103) испускают передатчиками по меньшей мере двух радаров широкополосные РЧ сигналы, и на этапе (104) принимают отраженные РЧ сигналы приемниками по меньшей мере двух радаров, при этом упомянутый способ дополнительно содержит этапы, на которых: определяют направление на объект способного двигаться устройства с использованием отраженных РЧ сигналов; и корректируют частоту среза фильтра низких частот. Определение направления на объект с помощью испускания сигналов и приема сигналов, отраженных от объекта, широко известно в радиолокации и, поэтому, подробного описания этой операции не требуется.
[0050] В еще одном варианте осуществления способ 100 обнаружения низкопрофильного объекта РЧ датчиком может дополнительно содержать этап, на котором вычисляют местоположение объекта относительно упомянутого устройства с использованием скорости упомянутого устройства и угла между направлением на объект и направлением движения упомянутого устройства. Вычисление местоположения объекта относительно радара с использованием скорости устройства, на котором установлен радар, и угла между направлением на объект и направлением движения упомянутого устройства, широко известно в радиолокации и, поэтому, подробного описания этой операции не требуется.
[0051] В еще одном варианте осуществления способ 100 обнаружения низкопрофильного объекта РЧ датчиком может дополнительно содержать этап, на котором обнаруживают объект по меньшей мере одним дополнительным датчиком, причем по меньшей мере один дополнительный датчик представляет собой одно из камеры, времяпролетной камеры, камеры со структурированной подсветкой, ультразвукового датчика и емкостного датчика.
[0052] Один вариант осуществления РЧ датчика 200 для обнаружения низкопрофильного объекта описан в дальнейшем подробнее со ссылкой на фиг. 2. РЧ датчик 200 способен работать согласно вариантам осуществления способа 100 обнаружения низкопрофильного объекта РЧ датчиком.
[0053] Радиочастотный (РЧ) датчик для обнаружения объекта, установленный на способном двигаться устройстве, содержит по меньшей мере один радар 201 и процессор 204, содержащий фильтр низких частот. Каждый радар 201 содержит передатчик 202 и приемник 203.
[0054] Передатчик 202 выполняет операцию (101), в которой испускает широкополосные РЧ сигналы, и приемник 203 выполняет операцию (102), в которой принимает отраженные от объекта РЧ сигналы.
[0055] Процессор 204 выполняет операцию (103), в которой формирует набор отраженных РЧ сигналов из принятых отраженных РЧ сигналов в порядке их приема. Количество отраженных РЧ сигналов в наборе задано заранее.
[0056] Процессор 204 выполняет операцию (104), в которой оцифровывает набор отраженных РЧ сигналов, причем каждый оцифрованный РЧ сигнал в упомянутом наборе представляет собой последовательность отсчетов. Оцифровка РЧ сигналов посредством их дискретизации и преобразование выборок в цифровую форму для получения последовательности отсчетов широко известна в уровне техники, поэтому подробное описание оцифровки РЧ сигналов не требуется.
[0057] Процессор 204 выполняет операцию (105), в которой вычисляет частоту среза для фильтра низких частот. Частота среза для фильтра низких частот вычисляется с использованием оцифрованных сигналов.
[0058] Процессор 204 выполняет операцию (106), в которой формирует объединенный сигнал из оцифрованного набора РЧ сигналов. Объединенный сигнал представляет собой матрицу, состоящую из набора оцифрованных РЧ сигналов, в которой каждый столбец матрицы представляет собой последовательность отсчетов оцифрованного РЧ сигнала. В первой строке матрицы находится первый отчет каждого оцифрованного РЧ сигнала из набора. Оцифрованные РЧ сигналы в матрице расположены в порядке их приема.
[0059] Процессор 204 выполняет операцию (107), в которой удаляет фоновый шум и вклад в сигнал объекта, находящегося под поверхностью, по которой движется упомянутое устройство. Удаление фонового шума и вклада в сигнал объекта выполняется посредством построчной фильтрации объединенного сигнала фильтром низких частот с вычисленной частотой среза. Фильтрация применяется отдельно к каждой строке упомянутой матрицы. В качестве фильтра низких частот может применяться любой известный цифровой фильтр низких частот, например, такой как фильтр Чебышева, эллиптический фильтр, фильтр Бесселя, фильтр Баттерворта. Предпочтительным является фильтр Баттерворта, спроектированный так, чтобы его амплитудно-частотная характеристика была максимально гладкой на частотах полосы пропускания.
[0060] Процессор 204 выполняет операцию (108), в которой формирует результирующий сигнал из отфильтрованного объединенного сигнала. Результирующий сигнал получают посредством суммирования отсчетов в каждой строке матрицы отфильтрованного объединенного сигнала.
[0061] Процессор 204 выполняет операцию (109), в которой вычисляет полную энергию результирующего сигнала посредством суммирования отсчетов результирующего сигнала.
[0062] Процессор 204 выполняет операцию (110), в которой обнаруживает объект посредством сравнения полной энергии с заранее заданным пороговым значением. Объект обнаружен, если полная энергия выше заранее заданного порогового значения. Пороговое значение вычисляется эмпирически на этапе заводского тестирования устройства для разных материалов поверхности, по которой движется устройство. Перед работой устройства пользователь может выбрать пороговое значение, соответствующее материалу поверхности, в настройках устройства и таким образом задать пороговое значение. Также устройство может автоматически выставить пороговое значение двигаясь некоторое время по поверхности, на которой отсутствуют препятствия. При автоматической установке порогового значения устройство, на котором установлен РЧ датчик, располагают в области пространства, на расстоянии 0,5м-1м от которой нет препятствии/объектов, что обеспечивает получение РЧ сигналов, не содержащих вклад объекта. Устройство перемещается в пределах этой области пространства. При перемещении устройство выполняет этапы (101)-(111) способа 100 обнаружения низкопрофильного объекта РЧ датчиком. Полная энергия, полученная при перемещении устройства пределах области пространства, на расстоянии 0,5м-1м от которой нет препятствии/объектов, и выполнении этапов (101)-(111), устанавливается в качестве порогового значения.
[0063] Процессор 204 выполняет операцию (111), в которой исключает из упомянутого набора РЧ сигнал, принятый раньше других в упомянутом наборе, и включает в упомянутый набор РЧ сигнал, принятый сразу после РЧ сигнала, принятого последним в упомянутом наборе, и выполнять операции (101)-(110).
[0064] В другом варианте осуществления РЧ датчика 200 процессор 204 дополнительно выполнен с возможностью определять скорость способного двигаться устройства, на котором установлен РЧ датчик 200, и вычислять расстояние от устройства, на котором установлен РЧ датчик 200, до объекта с использованием скорости устройства, на котором установлен РЧ датчик 200. Определение скорости может быть выполнено путем получения данных о скорости от способного двигаться устройства или любым известным в уровне техники способом. Вычисление расстояния до объекта с помощью испускания сигналов и приема сигналов, отраженных от объекта, широко известно в радиолокации и, поэтому, подробного описания этой операции не требуется.
[0065] В еще одном варианте осуществления РЧ датчик содержит по меньшей мере два радара 201, при этом передатчики 202 по меньшей мере двух радаров 201 испускают широкополосные РЧ сигналы, и приемники 203 по меньшей мере двух радаров 201 принимают отраженные РЧ сигналы, и процессор дополнительно выполняет следующие операции: определяет направление на объект устройства, на котором установлен РЧ датчик 200, с использованием отраженных РЧ сигналов; и корректирует частоту среза фильтра низких частот. Определение направления на объект с помощью испускания сигналов и приема сигналов, отраженных от объекта, широко известно в радиолокации и, поэтому, подробного описания этой операции не требуется.
[0066] В еще одном варианте осуществления РЧ датчика 200 процессор 204 дополнительно выполнен с возможностью вычислять местоположение объекта относительно устройства, на котором установлен РЧ датчик 200, с использованием скорости упомянутого устройства и угла между направлением на объект и направлением движения упомянутого устройства. Вычисление местоположения объекта относительно радара с использованием скорости устройства, на котором установлен радар, и угла между направлением на объект и направлением движения упомянутого устройства, широко известно в радиолокации и, поэтому, подробного описания этой операции не требуется.
[0067] В еще одном варианте осуществления РЧ датчик дополнительно содержит по меньшей мере один дополнительный датчик для обнаружения объекта, причем по меньшей мере один дополнительный датчик представляет собой одно из камеры, времяпролетной камеры, камеры со структурированной подсветкой, ультразвукового датчика и емкостного датчика.
[0068] Вышеприведенные описания вариантов осуществления изобретения являются иллюстративными, и модификации конфигурации и реализации не выходят за пределы объема настоящего описания. Например, хотя варианты осуществления изобретения описаны, в общем, в связи с фигурами 1-2, приведенные описания являются примерными. Хотя объект изобретения описан на языке, характерном для конструктивных признаков или методологических операций, понятно, что объект изобретения, определяемый прилагаемой формулой изобретения, не обязательно ограничен конкретными вышеописанными признаками или операциями. Более того, конкретные вышеописанные признаки и операции раскрыты как примерные формы реализации формулы изобретения. Изобретение не ограничено также показанным порядком этапов способа, порядок может быть видоизменен специалистом без новаторских нововведений. Некоторые или все этапы способа могут выполняться последовательно или параллельно.
[0069] Соответственно предполагается, что объем вариантов осуществления изобретения ограничивается только нижеследующей формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОРЕЖИМНЫЙ РАДИОЧАСТОТНЫЙ ДАТЧИК | 2019 |
|
RU2721587C1 |
| Устройство и способ для распознавания жестов с использованием радиочастотного датчика | 2017 |
|
RU2641269C1 |
| ЛАЗЕРНЫЙ ДОППЛЕРОВСКИЙ ДАТЧИК ЖИВОЙ ТКАНИ | 2021 |
|
RU2779852C1 |
| БЕСПИЛОТНОЕ ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ЕГО ДВИЖЕНИЕМ | 2022 |
|
RU2809334C1 |
| РАДИОВОЛНОВОЕ УСТРОЙСТВО ДЛЯ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ С НЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ ЧАСТОТНО-МОДУЛИРОВАННЫХ КОЛЕБАНИЙ | 2014 |
|
RU2584496C1 |
| СПОСОБ ПОЛУЧЕНИЯ ТРЁХМЕРНОГО ИЗОБРАЖЕНИЯ В РАДАРЕ ПЕРЕДНЕБОКОВОГО ОБЗОРА С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2019 |
|
RU2709484C1 |
| СПОСОБ ПОЛУЧЕНИЯ ТРЁХМЕРНОГО ИЗОБРАЖЕНИЯ В РАДАРЕ БОКОВОГО ОБЗОРА С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2019 |
|
RU2709623C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ ОБЪЕКТОВ | 2022 |
|
RU2806452C1 |
| РАДИОЧАСТОТНЫЙ ДАТЧИК ДЛЯ КОНТРОЛЯ УВЛАЖНЕННОСТИ КОЖИ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ УВЛАЖНЕННОСТИ КОЖИ | 2024 |
|
RU2831219C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЙ ДО ОБЪЕКТА | 2014 |
|
RU2577079C1 |
Использование: изобретение относится к области обнаружения объекта радиочастотным (РЧ) датчиком. Сущность: предложены способ обнаружения низкопрофильного объекта РЧ датчиком и РЧ датчик. РЧ датчик предназначен для осуществления способа обнаружения низкопрофильного объекта. РЧ датчик содержит по меньшей мере один радар и процессор. Каждый радар содержит передатчик и приемник, при этом передатчик выполнен с возможностью испускать широкополосные РЧ сигналы и приемник выполнен с возможностью принимать отраженные от объекта РЧ сигналы. Процессор выполнен с возможностью выполнять следующие операции: формировать набор отраженных РЧ сигналов, содержащий заранее заданное количество отраженных РЧ сигналов, оцифровывать набор отраженных РЧ сигналов, определять скорость устройства, на котором установлен РЧ датчик, и вычислять частоту среза для фильтра низких частот с использованием определенной скорости, формировать объединенный сигнал из набора оцифрованных РЧ сигналов, причем объединенный сигнал представляет собой матрицу, состоящую из набора оцифрованных РЧ сигналов, в которой каждый столбец матрицы представляет собой последовательность отсчетов оцифрованного РЧ сигнала, в первой строке матрицы находится первый отчет каждого оцифрованного РЧ сигнала из набора и оцифрованные РЧ сигналы в матрице расположены в порядке их приема, удалять фоновый шум и вклад в сигнал объекта, находящегося под поверхностью, по которой движется упомянутое устройство, посредством построчной фильтрации объединенного сигнала фильтром низких частот с вычисленной частотой среза, при этом фильтрация применяется отдельно к каждой строке упомянутой матрицы, формировать результирующий сигнал из отфильтрованного объединенного сигнала посредством суммирования отсчетов в каждой строке матрицы отфильтрованного объединенного сигнала, вычислять полную энергию результирующего сигнала посредством суммирования его отсчетов, обнаруживать объект посредством сравнения полной энергии с заранее заданным пороговым значением, при этом если полная энергия выше заранее заданного порогового значения, то объект обнаружен, исключать из упомянутого набора РЧ сигнал, принятый раньше других в упомянутом наборе, и включать в упомянутый набор РЧ сигнал, принятый сразу после РЧ сигнала, принятого последним в упомянутом наборе, и повторно выполнять вышеприведенные операции. Технический результат: обеспечение обнаружения низкопрофильного объекта и устранение ложных обнаружений объектов, вызванных фоновым шумом и наличием подпольных объектов. 2 н. и 8 з.п. ф-лы, 2 ил.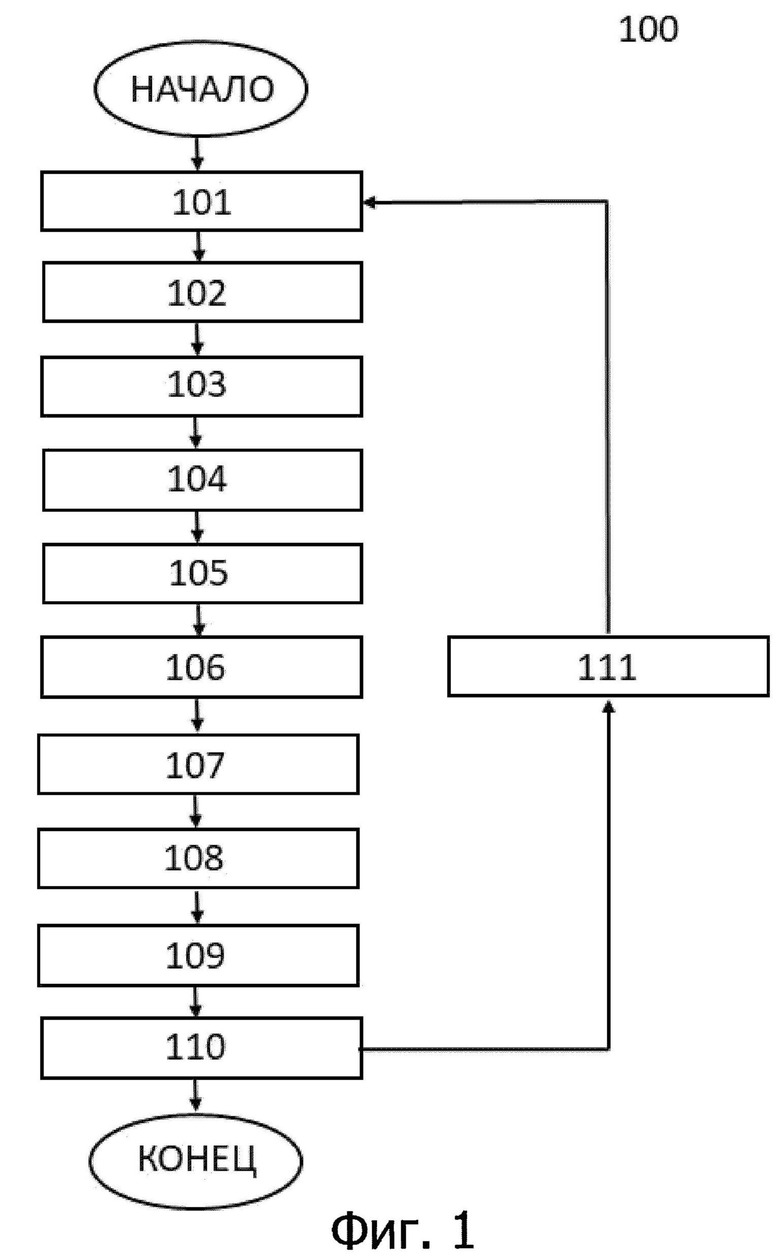
1. Способ обнаружения низкопрофильного объекта радиочастотным (РЧ) датчиком, установленным на способном двигаться устройстве, причем упомянутый способ содержит:
этап (101), на котором испускают передатчиком по меньшей мере одного радара широкополосные РЧ сигналы;
этап (102), на котором принимают отраженные от объекта РЧ сигналы приемником по меньшей мере одного радара;
этап (103), на котором формируют набор отраженных РЧ сигналов, содержащий заранее заданное количество отраженных РЧ сигналов, причем упомянутый набор содержит отраженные РЧ сигналы в порядке их приема;
этап (104), на котором оцифровывают набор отраженных РЧ сигналов, причем каждый оцифрованный РЧ сигнал в упомянутом наборе представляет собой последовательность отсчетов;
этап (105), на котором вычисляют частоту среза для фильтра низких частот;
этап (106), на котором формируют объединенный сигнал из набора оцифрованных РЧ сигналов, причем объединенный сигнал представляет собой матрицу, состоящую из набора оцифрованных РЧ сигналов, в которой каждый столбец матрицы представляет собой последовательность отсчетов оцифрованного РЧ сигнала, в первой строке матрицы находится первый отчет каждого оцифрованного РЧ сигнала из набора и оцифрованные РЧ сигналы в матрице расположены в порядке их приема;
этап (107), на котором удаляют фоновый шум и вклад в сигнал объекта, находящегося под поверхностью, по которой движется упомянутое устройство, посредством построчной фильтрации объединенного сигнала фильтром низких частот с вычисленной частотой среза, при этом фильтрация применяется отдельно к каждой строке упомянутой матрицы;
этап (108), на котором формируют результирующий сигнал из отфильтрованного объединенного сигнала посредством суммирования отсчетов в каждой строке матрицы отфильтрованного объединенного сигнала;
этап (109), на котором вычисляют полную энергию результирующего сигнала посредством суммирования его отсчетов;
этап (110), на котором обнаруживают объект посредством сравнения полной энергии с заранее заданным пороговым значением, при этом если полная энергия выше заранее заданного порогового значения, то объект обнаружен; и
этап (111), на котором исключают из упомянутого набора РЧ сигнал, принятый раньше других в упомянутом наборе, и включают в упомянутый набор РЧ сигнал, принятый сразу после РЧ сигнала, принятого последним в упомянутом наборе, и выполняют этапы (101)-(110).
2. Способ по п. 1, дополнительно содержащий этап, на котором определяют скорость упомянутого устройства и вычисляют расстояние от упомянутого устройства до объекта с использованием скорости упомянутого устройства.
3. Способ по п. 1, в котором на этапе (103) испускают передатчиками по меньшей мере двух радаров широкополосные РЧ сигналы и на этапе (104) принимают отраженные РЧ сигналы приемниками по меньшей мере двух радаров, при этом упомянутый способ дополнительно содержит этапы, на которых:
определяют направление на объект упомянутого устройства с использованием отраженных РЧ сигналов и
корректируют частоту среза фильтра низких частот.
4. Способ по п. 3, дополнительно содержащий этап, на котором вычисляют местоположение объекта относительно упомянутого устройства с использованием скорости упомянутого устройства и угла между направлением на объект и направлением движения упомянутого устройства.
5. Способ по п. 1, дополнительно содержащий этап, на котором обнаруживают объект по меньшей мере одним дополнительным датчиком, причем по меньшей мере один дополнительный датчик представляет собой одно из камеры, времяпролетной камеры, камеры со структурированной подсветкой, ультразвукового датчика и емкостного датчика.
6. Радиочастотный (РЧ) датчик для обнаружения объекта, установленный на способном двигаться устройстве, причем РЧ датчик содержит:
- по меньшей мере один радар, причем каждый радар содержит передатчик и приемник, при этом передатчик выполнен с возможностью (101) испускать широкополосные РЧ сигналы и приемник выполнен с возможностью (102) принимать отраженные от объекта РЧ сигналы; и
- процессор, выполненный с возможностью выполнять следующие операции:
(103) формировать набор отраженных РЧ сигналов, содержащий заранее заданное количество отраженных РЧ сигналов, причем упомянутый набор содержит отраженные РЧ сигналы в порядке их приема,
(104) оцифровывать набор отраженных РЧ сигналов, причем каждый оцифрованный РЧ сигнал в упомянутом наборе представляет собой последовательность отсчетов,
(105) вычислять частоту среза для фильтра низких частот,
(106) формировать объединенный сигнал из набора оцифрованных РЧ сигналов, причем объединенный сигнал представляет собой матрицу, состоящую из набора оцифрованных РЧ сигналов, в которой каждый столбец матрицы представляет собой последовательность отсчетов оцифрованного РЧ сигнала, в первой строке матрицы находится первый отчет каждого оцифрованного РЧ сигнала из набора и оцифрованные РЧ сигналы в матрице расположены в порядке их приема,
(107) удалять фоновый шум и вклад в сигнал объекта, находящегося под поверхностью, по которой движется упомянутое устройство, посредством построчной фильтрации объединенного сигнала фильтром низких частот с вычисленной частотой среза, при этом фильтрация применяется отдельно к каждой строке упомянутой матрицы,
(108) формировать результирующий сигнал из отфильтрованного объединенного сигнала посредством суммирования отсчетов в каждой строке матрицы отфильтрованного объединенного сигнала,
(109) вычислять полную энергию результирующего сигнала посредством суммирования его отсчетов,
(110) обнаруживать объект посредством сравнения полной энергии с заранее заданным пороговым значением, при этом если полная энергия выше заранее заданного порогового значения, то объект обнаружен,
(111) исключать из упомянутого набора РЧ сигнал, принятый раньше других в упомянутом наборе, и включать в упомянутый набор РЧ сигнал, принятый сразу после РЧ сигнала, принятого последним в упомянутом наборе, и выполнять операции (101)-(110).
7. РЧ датчик по п. 6, в котором процессор дополнительно выполнен с возможностью определять скорость упомянутого устройства и вычислять расстояние от упомянутого устройства до объекта с использованием скорости упомянутого устройства.
8. РЧ датчик по п. 6, содержащий по меньшей мере два радара, при этом передатчики по меньшей мере двух радаров испускают широкополосные РЧ сигналы и приемники по меньшей мере двух радаров принимают отраженные РЧ сигналы, и
при этом процессор дополнительно выполнен с возможностью выполнять следующие операции:
определять направление на объект упомянутого устройства с использованием отраженных РЧ сигналов и
корректировать частоту среза фильтра низких частот.
9. РЧ датчик по п. 8, в котором процессор дополнительно выполнен с возможностью вычислять местоположение объекта относительно упомянутого устройства с использованием скорости упомянутого устройства и угла между направлением на объект и направлением движения упомянутого устройства.
10. РЧ датчик по п. 6, дополнительно содержащий по меньшей мере один дополнительный датчик для обнаружения объекта, причем по меньшей мере один дополнительный датчик представляет собой одно из камеры, времяпролетной камеры, камеры со структурированной подсветкой, ультразвукового датчика и емкостного датчика.
| US 10197664 B2, 05.02.2019 | |||
| US 2016003946 A1, 07.01.2016 | |||
| US 2016274580 A1, 22.09.2016. |

