Область техники, к которой относится изобретение.
Данное изобретение относится к области измерения расстояний до объекта с помощью электромагнитных волн, а более конкретно к оптическим устройствам для определения расстояний до объекта, включающим в себя источник излучения на объект модулированного бинарного оптического сигнала, генератор создания модуляции в виде бинарной последовательности максимальной длины в бинарном оптическом сигнале, генератор тактового сигнала, светочувствительный элемент детектирования отраженного оптического сигнала от объекта, аналогово-цифровой преобразователь сигнала со светочувствительного элемента в цифровой сигнал, модуль вычисления корреляции излученного и отраженного сигналов, модуль порогового обнаружения сигнала, модуль вычисления расстояния до определяемого объекта по временной задержке отраженного сигнала.
Уровень техники.
В данном описании используются следующие термины:
Бинарная M-последовательность или бинарная последовательность максимальной длины (англ. Maximum length sequence, MLS) - псевдослучайная бинарная последовательность, порожденная регистром сдвига с линейной обратной связью и имеющая максимальный период N=pn-1, где n - целое натуральное число, большее 2, а p - простое число для случая бинарной последовательности равно 2. Для бинарных M-последовательностей, записанных в алфавите «0; 1», число единиц всегда больше на единицу, чем число нулей. При переходе к алфавиту «-1; 1» заменяют нуль на единицу, а единицу на минус единицу.
КМОП (комплементарная структура металл-оксид-полупроводник; англ. CMOS, complementary metal-oxide-semiconductor) - технология построения электронных схем. Отличительной особенностью схем КМОП по сравнению с биполярными технологиями является очень малое энергопотребление в статическом режиме (в большинстве случаев можно считать, что энергия потребляется только во время переключения состояний). КМОП-схемы обладают высокой скоростью действия и низким энергопотреблением.
ЛАДАР (LADAR) - лазерный локатор, сокращение от русского или английского варианта «лазерный радар», где радар от англ. radar (radio detection and ranging) - радиообнаружение и дальнометрия.
ЛИДАР (транслитерация LIDAR англ. Light Identification Detection and Ranging - световое обнаружение и определение дальности) - технология получения и обработки информации об удаленных объектах с помощью активных оптических систем, использующих явления отражения света и его рассеяния в прозрачных и полупрозрачных средах. Лидар как прибор представляет собой как минимум активный дальномер оптического диапазона. Обычно в России подобные устройства называются лазерными дальномерами.
БПУ - быстрое преобразование Уолша для функций Уолша, упорядоченных по Адамару, в иностранной литературе часто обозначается как FHT. Необходимо для вычисления взаимной циклической корреляции между выборкой длины N и M-последовательностью длины N, причем N=2n-1, где n - целое натуральное число, большее 2.
Измерение расстояний до объектов производится путем отправления оптического сигнала, например лазерного излучения, получения отраженного сигнала, определения времени запаздывания и вычисления по нему расстояния.
Так в патенте US 8537218, опубликованном в 2013 г., описан метод определения расстояний до объекта по задержке времени, то есть определения расстояния от некогерентного источника излучения до ячейки приемной матрицы, основанный на измерении времени прохождения излученного импульса некогерентного излучения фиксированной длительности T0, при этом импульс излучается периодически. Приемная матрица и излучатель расположены рядом. Метод измерения основан на том, что точное расстояние до поверхности объекта определяется как время прохождения переднего фронта излучаемого импульса до поверхности и отраженного от нее импульса до ячеек приемной матрицы (в иностранной патентной литературе обозначается как TOF - time of flight), умноженное на C/2 (C - скорость распространения электромагнитного излучения).
Метод определения TOF состоит в том, что априори известен интервал значений TOF=T1+dt, где dt может изменяться от T1 до T1+T0. Согласно патента US 8537218 ячейка (пиксел) приемной матрицы содержит один элемент, генерирующий фототок (photo gate), и две структуры (КМОП/МДП), способные накапливать, удерживать и удалять заряд Q. Для определения dt в период времени [T1, T1+T0] под воздействием управляющих сигналов фоток поступает через transfer gate 1 на накопитель заряда Q1, а в период времени [T1+T0, T1+2∙T0] поступает через transfer gate 2 на накопитель заряда Q2. Накопители зарядов выполняют функцию интеграторов фототока на отрезках T0. Draining gates используются для быстрого удаления накопленных зарядов Q1 и Q2. Значения накопленных зарядов Q1 и Q2 используются для определения dt путем следующего вычисления:
dt=T0(Q2/(Q1+Q2)).
Данный метод, как правило, используется для определения расстояния до поверхности объектов в тех случаях, когда T1 меньше или, по крайней мере, кратно соразмерим по порядку с T0 величины. В классификации, приведенной в справочнике «Handbook of 3D Machine Vision - Optical Metrology and lmaging» под редакцией Song Zhang, опубликованном в 2013 г., данный метод назван, как «Time-Dependent Charge Detection», что можно перевести, как определение заряда, зависящего от времени пролета (TOF). Частота периодического накопления заряда Q в ячейках подобной приемной матрицы может достигать 10-20 МГц.
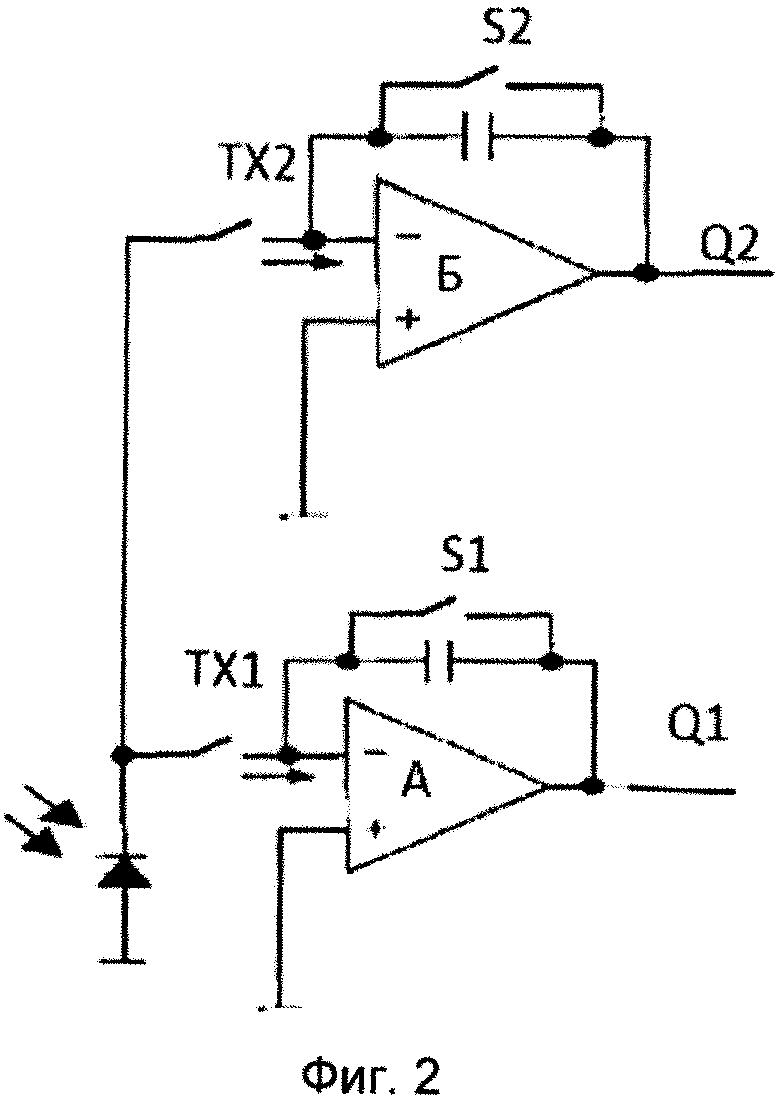
Для понимания сути метода приведем эквивалентную схему (блок интегрирования сигнала на интервалах времени T0), реализующую функции пиксела/ячейки приемной матрицы и временные диаграммы, объясняющие реализуемый этой схемой способ.
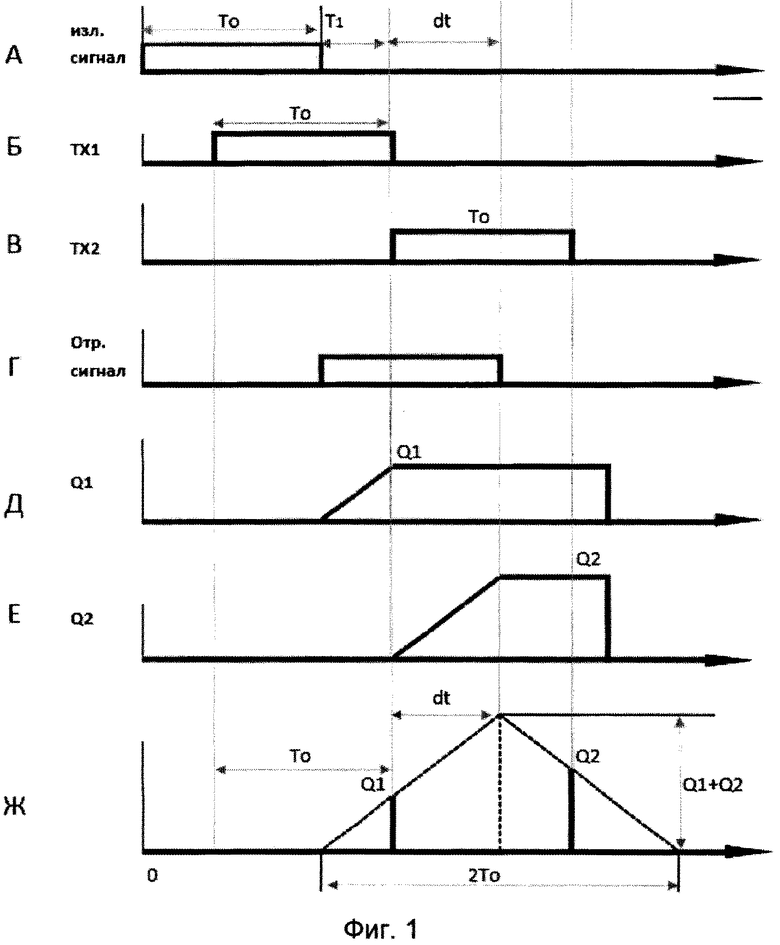
На объект излучается зондирующий оптический сигнал (импульс) длительности T0 (см. фиг.1, график А).
Отраженный от объекта сигнал задержан на время T1+dt (см. фиг. 1, график Г).
Для определения dt используется следующий способ.
По стробимпульсу TX1 (см. фиг. 1, график Б) длительности T0, задержанному относительно заднего фронта излученного сигнала (см. фиг. 1, график А) на время T1, фототок подается на интегратор А. (см. фиг. 2). По заднему фронту стробсигнала TX1 (см. фиг. 1, график Б) производится считывание дискретного отсчета Q1. Далее при помощи ключа S1 производится обнуление значения на интеграторе А (см. фиг. 2). Изменение сигнала на выходе интегратора А (см. фиг. 2) приведено на графике Д фиг. 1.
По стробимпульсу TX2 (см. фиг. 1, график В) длительности T0, задержанному относительно заднего фронта излученного сигнала (См. фиг. 1, график А) на время T0+T1, фототок подается на интегратор А (см. фиг. 2). По заднему фронту стробсигнала TX2 производится считывание дискретного отсчета Q2, далее при помощи ключа S2 производится обнуление значения на интеграторе Б (см. фиг. 2). Изменение сигнала на выходе интегратора Б приведено на графике Е фиг. 1.
Задержка отраженного принимаемого сигнала относительно зондирующего определяется как
Tзад=T1+dt,
где dt=T0∙Q2/(Q1+Q2) или dt=Т0∙(1-Q1/(Q1+Q2)).
На графике Ж фиг. 1 приведено графическое пояснение к способу определения dt.
На основе такого метода существуют устройства, которые имеют следующие недостатки:
- малый динамический диапазон разрешаемых целей, ограниченный возможностью ячейки памяти накапливать заряд, что соответственно ограничивает и длительность излучаемого сигнала, и максимально определяемую дальность до объекта;
- неспособность работать в условиях засветки от сторонних источников излучения;
- очень малый диапазон (интервал) разрешаемых дальностей, равный T0·C/2;
- малое значение начала диапазона (интервала) разрешаемых дальностей, равное T1∙C/2, ограниченное тем, что мощность принимаемого сигнала уменьшается обратно 4-й степени от дальности до объекта или TOF;
- влияние наведенных помех, связанных с переключением ключей, коммутирующих фототок на результаты измерения Q1 и Q2.
Данные недостатки решаются в сложных ЛИДАР и ЛАДАР системах. В них используют высокочастотную модуляцию излучаемых сигналов, но это существенным образом усложняет обработку сигналов. Фактически для каждой приемной ячейки нужен свой радиочастотный тракт.
Для увеличения измеряемой дальности также применяют и метод накопления - многократное зондирование цели. Некогерентное накопление позволяет при условии статистической независимости шумовой составляющей в принимаемом сигнале увеличить соотношение сигнал/шум в √N раз. N - количество зондирований в серии (объем накопления).
Для повышения измерения расстояний до объекта сигнал подается периодический, примером подобного способа определения дальности может служить, например, способ, описанный в патенте РФ №2359228, опубликован в 2009 г., или в международной патентной заявке WO/2005/006016, опубликованной в 2005 г.
Однако данный метод имеет недостаток, связанный с большим временем определения дальности, связанный с тем, что время накопления сигнала кратно времени рекуррентного периода посылки зондирующих импульсов, длительность которого равна максимальной разрешаемой дальности Rmax, умноженной на 2/C. Так для Rmax=10 км при накоплении сигнала за 200 рекуррентных периодов потребуется 13,4 мс.
Данный недостаток устраняется за счет использования в качестве зондирующих сигналов оптического диапазона, модулированного M-последовательностью. Это позволяет при той же мощности оптического передатчика и длительности рекуррентного периода увеличить энергию зондирующего сигнала в (N+1)/2, где N - период M-последовательности.
Так в патенте US 6753950, опубликованном в 2004 г., описан метод определения дальности до объекта и устройство, которое его реализует, где описано оптическое устройство для определения расстояний до объекта, включающее в себя источник излучения на объект модулированного бинарного оптического сигнала, вход которого соединен с выходом генератора создания модуляции в виде бинарной последовательности максимальной длины в бинарном оптическом сигнале, вход которого соединен с выходом генератора тактового сигнала, светочувствительный элемент детектирования отраженного оптического сигнала от объекта, выход которого соединен с первым входом аналогово-цифрового преобразователя сигнала со светочувствительного элемента в цифровой сигнал, а выход аналогово-цифрового преобразователя соединен с первым входом модуля вычисления корреляции излученного и отраженного сигналов, причем второй вход модуля вычисления корреляции излученного и отраженного сигналов соединен с выходом генератора создания модуляции в виде бинарной последовательности максимальной длины в бинарном оптическом сигнале, а выход модуля вычисления корреляции излученного и отраженного сигналов соединен с входом модуля порогового обнаружения сигнала, выход которого соединен с первым входом модуля вычисления расстояния до определяемого объекта по временной задержке отраженного сигнала, выход которого соединен со входом генератора создания модуляции в виде бинарной последовательности максимальной длины.
Данное устройство является наиболее близким по технической сути и достигаемому техническому результату и выбрано за прототип предлагаемого изобретения как устройства.
Недостатком этого прототипа является то, что для повышения точности определения дальности до объекта путем нахождения временного положения максимума корреляции используется повышенная частота квантования времени на дискреты, равная M/T0, где T0 временной интервал одной позиции в последовательности максимальной длины. Это приводит к существенному увеличению энергопотребления.
Это связано с тем, что для повышения точности определения расстояния необходимо увеличивать тактовую частоту в M раз. При этом использование частот свыше 125 МГц, что опубликовано, например, в патенте US 7206062, опубликованном в 2007 г., приводит к необходимости использования дорогостоящих процессоров и АЦП с высокими показателями рассеиваемой мощности. В патенте предлагается для снижения рассеиваемой мощности на каждый АЦП использовать промежуточное устройство быстродействующей дискретно-аналоговой памяти с последующим мультиплексированием данных с устройства дискретно-аналоговой памяти на АЦП преобразователь. В прототипе указано, что для оцифровки сигнала с частотой 1 ГГц с использованием 8-10-битных АЦП потребуются АЦП, рассеивающие 0,5-6 Вт на одно быстродействующее АЦП. Данное техническое решение приводит к увеличению времени обработки принимаемого сигнала.
Другим недостатком прототипа является необходимость проведения избыточных вычислений по сравнению с предлагаемым технически решением, для чего имеется дополнительный модуль вычисления корреляции с выборкой, произведенной с повышенной тактовой частотой.
Раскрытие изобретения.
Настоящее изобретение, главным образом, имеет целью предложить оптическое устройство для определения расстояний до объекта, позволяющее, по меньшей мере, сгладить как минимум один из указанных выше недостатков, а именно обеспечить снижение энергопотребления устройства за счет снижения нагрузки на вычислительные модули, что и является поставленной технической задачей.
Для достижения этой цели устройство дополнительно включает в себя:
- блок интегрирования, первый вход которого соединен с выходом светочувствительного элемента детектирования отраженного оптического сигнала от объекта, а выход которого соединен с входом аналогово-цифрового преобразователя сигнала,
- блок буферной памяти, первый вход которого соединен с выходом аналогово-цифрового преобразователя, а выход которого соединен с первым входом модуля вычисления корреляции излученного и отраженного сигналов,
- блок конъюнкции сигналов, первый вход которого соединен с выходом модуля вычисления расстояния до определяемого объекта по временной задержки отраженного сигнала, а второй вход которого соединен с выходом генератора тактового сигнала, а выход блока конъюнкции сигналов соединен со вторым входом блока интегрирования, вторым входом аналогово-цифрового преобразователя и вторым входом блока буферной памяти,
- блок формирования кратного синхроимпульса, по которому содержимое ячеек блока буферной памяти переписывается в модуль вычисления корреляции, соединенный с блоком буферной памяти,
- блок вычисления временной задержки отраженного сигнала, соединенный с выходом модуля порогового обнаружения сигнала и входом модуля вычисления расстояния до определяемого объекта по временной задержке отраженного сигнала,
- блок преобразования нулевого сигнала в отрицательный, соединенный с входом модуля вычисления корреляции излученного и отраженного сигналов и с выходом генератора создания модуляции в виде бинарной последовательности максимальной длины в бинарном оптическом сигнале, а выход модуля вычисления корреляции излученного и отраженного сигналов дополнительно соединен со вторым входом модуля вычисления расстояния до определяемого объекта по временной задержке отраженного сигнала.
Благодаря данным выгодным характеристикам появляется возможность организовать иную схему определения дальности до цели, которая основана на циклической свертке, что значительно сокращает количество операций, снижает энергопотребление.
Существует также вариант изобретения, в котором светочувствительный элемент детектирования отраженного оптического сигнала от объекта выполнен в виде элементов светочувствительной матрицы.
Благодаря данной выгодной характеристике появляется возможность использовать имеющую множество элементов светочувствительную матрицу для возможности определения дальности сразу в нескольких направлениях.
Существует также вариант изобретения, в котором элементы светочувствительной матрицы размещены на матрице вместе с устройствами интегрирования, в качестве которого применены КМОП или МДП (металл-диэлектрик-полупроводник) структуры, интегрирующие фототок. Например, аналогичные описанным в патенте US 8537218.
Благодаря данной выгодной характеристике появляется возможность простого исполнения блока интегрирования, когда он выполнен в виде МДП/КМОП структур, позволяющих накапливать фототок в виде заряда.
Существует также вариант изобретения, в котором светочувствительный элемент детектирования отраженного оптического сигнала расположен на гиростабилизированной платформе.
Благодаря данной выгодной характеристике появляется возможность расширения использования предлагаемого решения для летательных аппаратов, в частности для беспилотных летательных аппаратов, которые могут использовать предлагаемое решение в качестве основы технического зрения.
Совокупность существенных признаков предлагаемого изобретения как устройства неизвестна из уровня техники для устройств аналогичного назначения, что позволяет сделать вывод о соответствии критерию «новизна» для изобретения.
Краткое описание чертежей.
Другие отличительные признаки и преимущества данного изобретения ясно вытекают из описания, приведенного ниже для иллюстрации и не являющегося ограничительным, со ссылками на прилагаемые рисунки, на которых:
- фиг. 1 изображает временные диаграммы, объясняющие реализуемый уровнем техники способ определения расстояния,
- фиг. 2 изображает блок интегрирования сигнала на временных отрезках T0 и формирования дискретных отсчетов Q согласно уровню техники,
- фиг. 3 изображает функциональную схему оптического устройства для определения расстояний до объекта согласно изобретению,
- фиг. 4 изображает временные диаграммы к фиг. 3 и иллюстрирует пример работы устройства согласно изобретению,
- фиг. 5 иллюстрирует вычисление свертки для примера работы изобретения согласно изобретению,
- фиг. 6 иллюстрирует вычисление циклической свертки согласно изобретению,
- фиг. 7 иллюстрирует вычисление выборки G путем апериодической свертки в примере 1 работы изобретения согласно изобретению,
- фиг. 8 иллюстрирует устройство для вычисления апериодической свертки для вычисления выборки G согласно изобретению (иллюстрирует вычисление последовательности G с использованием трансверсального фильтра),
- фиг. 9 иллюстрирует вычисление выборки G в примере 2 работы изобретения, согласно изобретению,
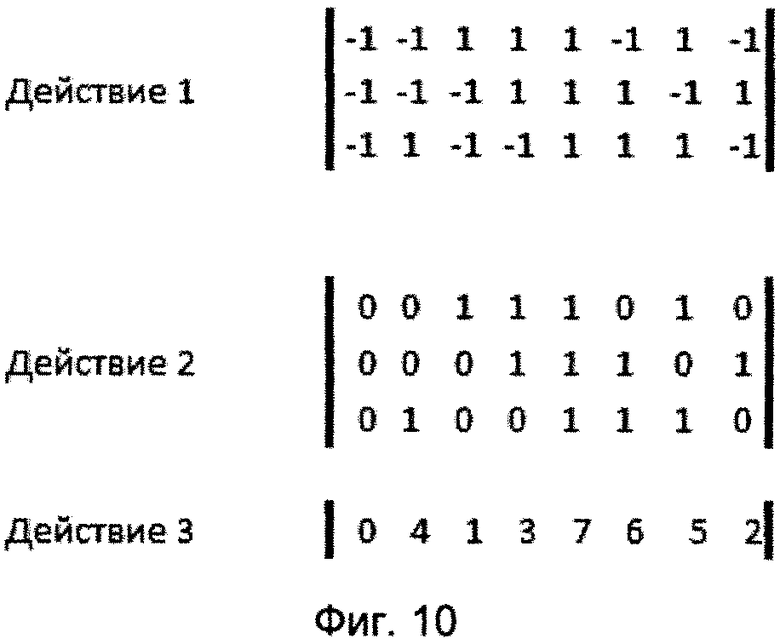
- фиг. 10 иллюстрирует действия 1, 2, 3 в примере 2 по приведению матрица A к матрице Уолша, упорядоченной по Адамару согласно изобретению,
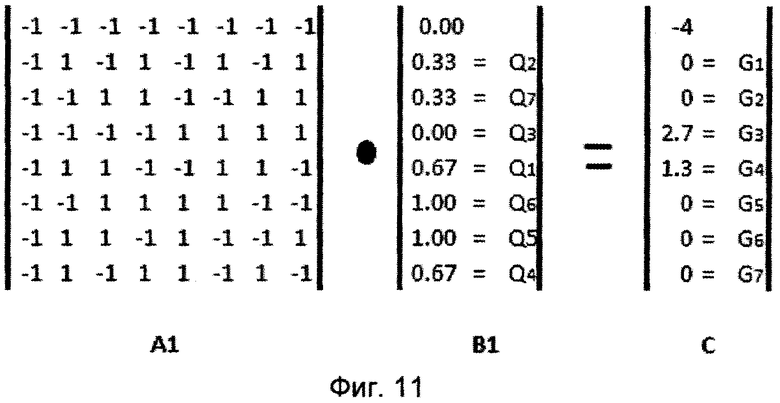
- фиг. 11 иллюстрирует столбцы B1 и C и матрицу A1 в примере 2 работы изобретения согласно изобретению,
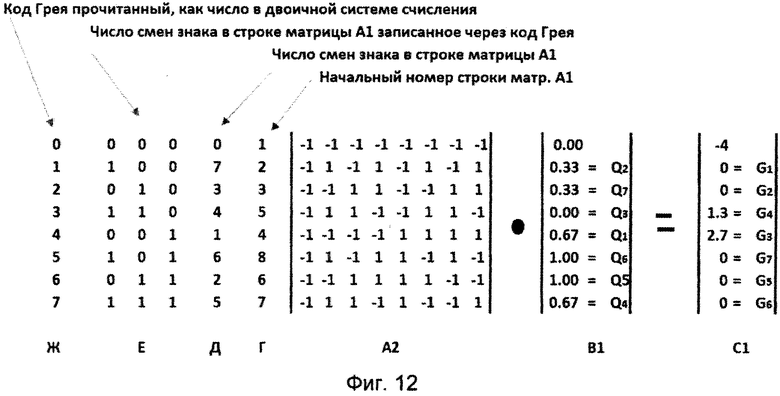
- фиг. 12 иллюстрирует столбцы B1 и B1 и матрицу A2 в примере 2 работы изобретения согласно изобретению,
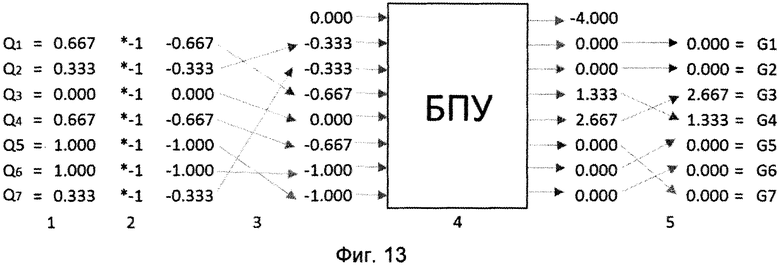
- фиг. 13 иллюстрирует порядок вычисления корреляции в модуле (блоке 6) с использованием БПУ в примере 2 работы изобретения согласно изобретению,
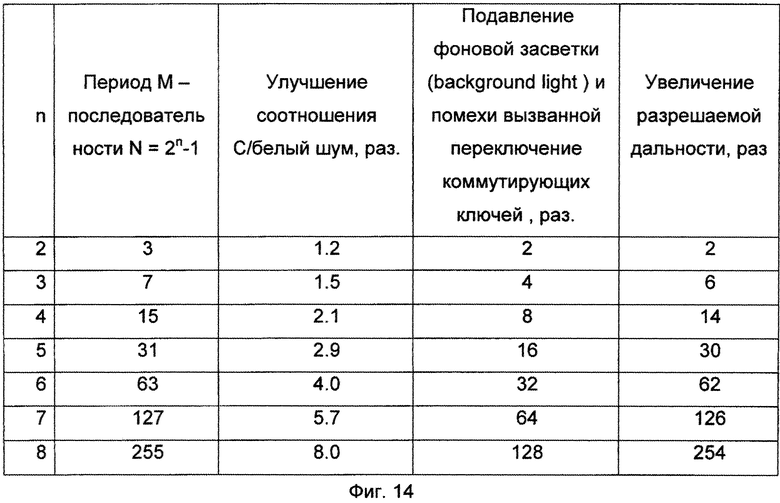
- фиг. 14 иллюстрирует таблицу сравнения с методом Time-Dependent Charge Detection и увеличения соотношения «Сингал/Шум» в зависимости от n для примера работы изобретения,
- фиг. 15 иллюстрирует таблицу сравнения с прототипом,
- фиг. 16 показывает этапы работы устройства с циклической сверткой согласно изобретению.
Согласно фиг. 3 оптическое устройство для определения расстояний до объекта включает в себя источник излучения 1 на объект модулированного бинарного оптического сигнала, вход которого соединен с выходом генератора 2 создания модуляции в виде бинарной последовательности максимальной длины в бинарном оптическом сигнале, вход которого соединен с выходом генератора тактового сигнала 3.
Светочувствительный элемент 4 детектирования отраженного оптического сигнала от объекта, выход которого соединен с первым входом аналогово-цифрового преобразователя сигнала 5 со светочувствительного элемента в цифровой сигнал, а выход аналогово-цифрового преобразователя 5 соединен с первым входом модуля 6 вычисления корреляции излученного и отраженного сигналов, причем второй вход модуля 6 вычисления корреляции излученного и отраженного сигналов соединен с выходом генератора 2 создания модуляции в виде бинарной последовательности максимальной длины в бинарном оптическом сигнале, а выход модуля 6 вычисления корреляции излученного и отраженного сигналов соединен с входом модуля 7 порогового обнаружения сигнала, выход которого соединен с первым входом модуля 8 вычисления расстояния до определяемого объекта по временной задержке отраженного сигнала, выход которого соединен с входом генератора 2 создания модуляции в виде бинарной последовательности максимальной длины.
Оптическое устройство для определения расстояний до объекта дополнительно включает в себя блок интегрирования 9, первый вход которого соединен с выходом светочувствительного элемента 4 детектирования отраженного оптического сигнала от объекта, а выход которого соединен с входом аналогово-цифрового преобразователя сигнала 5.
Оптическое устройство дополнительно включает в себя блок буферной памяти 10, первый вход которого соединен с выходом аналогово-цифрового преобразователя 5, а выход которого соединен с первым входом модуля 6 вычисления корреляции излученного и отраженного сигналов.
Оптическое устройство дополнительно включает в себя блок конъюнкции сигналов 11, первый вход которого соединен с выходом модуля 8 вычисления расстояния до определяемого объекта по временной задержки отраженного сигнала, а второй вход которого соединен с выходом генератора 3 тактового сигнала, а выход блока конъюнкции сигналов 11 соединен со вторым входом блока интегрирования 9, вторым входом аналогово-цифрового преобразователя 5 и вторым входом блока буферной памяти 10.
Оптическое устройство дополнительно включает в себя блок формирования кратного синхроимпульса 12, по которому содержимое ячеек блока буферной памяти 10 переписывается в модуль вычисления корреляции 6, соединенный с блоком буферной памяти 10.
Оптическое устройство дополнительно включает в себя блок вычисления временной задержки отраженного сигнала 13, соединенный с выходом модуля порогового обнаружения сигнала 7 и входом модуля 8 вычисления расстояния до определяемого объекта по временной задержке отраженного сигнала.
Оптическое устройство дополнительно включает в себя блок преобразования нулевого сигнала в отрицательный 14, соединенный с входом модуля вычисления корреляции излученного и отраженного сигналов бис выходом генератора 2 создания модуляции в виде бинарной последовательности максимальной длины в бинарном оптическом сигнале. Данный модуль заменяет в M-последовательности нули на минус единицы.
Выход модуля 6 вычисления корреляции излученного и отраженного сигналов дополнительно соединен со вторым входом модуля 8 вычисления расстояния до определяемого объекта по временной задержки отраженного сигнала. Объект обозначен как 15.
Светочувствительный элемент детектирования отраженного оптического сигнала от объекта 4 может быть выполнен в виде элементов светочувствительной матрицы. Элементы светочувствительной матрицы размещены на матрице вместе с устройствами интегрирования, в качестве которого применены структуры типа металл-диэлектрик-полупроводник, интегрирующие фототок.
Светочувствительный элемент детектирования отраженного оптического сигнала 4 может быть расположен на гиростабилизированной платформе.
Синхроимпульсы, подаваемые на блоки 5 и 10, должны быть задержаны на T0 по отношению к синхроимпульсам, подаваемым на блок 9. Для этого можно ввести дополнительный блок 16 задержки синхроимпульсов на T0.
Осуществление изобретения.
Оптическое устройство для определения расстояний до объекта работает следующим образом. Приведем наиболее исчерпывающий пример реализации изобретения, имея в виду, что данный пример не ограничивает применения изобретения.
Удаленность объекта определяют на интервале
dD=(N-1)·T0∙C/2,
где N - количество членов M-последовательности, N=2n-1, где
N - целое число больше 2,
T0 - длительность одного такта (нуля или единицы) в M-последовательности,
C - скорость распространения электромагнитного излучения в среде (скорость света).
Начало интервала определения дальности определяется
R1=(k+1)·T0∙С/2,
где Tстр.=T0.(N+k), которое кратно T0, где
k - натуральное число, большее или равное 0.
В прототипе параметры R1 и dD, суть которых априорная информация о диапазоне дальностей, в котором производится поиск и обнаружение цели, задается сигналом «Measure Range», подаваемым на модуль 8.
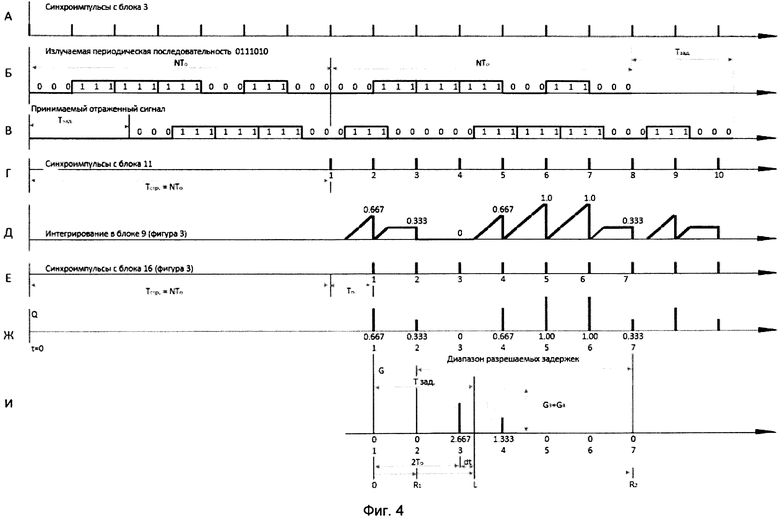
На фиг. 4 отражены синхроимпульсы, подаваемые с блока 3 (график А, на фиг. 4). Излучаемый сигнал, модулированный полседовательностью 0111010, изображен на графике Б на фиг. 4. Задержанный отраженный сигнал, детектированный приемником, изображен на графике В, фиг. 4. Синхроимпульсы с блока 11 показаны на графике Г, а с блока 16 - на графике Е, фиг. 4. Отражение процесса интегрирования входного сигнала на временных отрезках [0; T0] показано на графике Д, фиг. 4. Сформированная дискретная последовательность (выборка) {Q} на выходе блока 5 показана на график Ж, фиг. 4. Сформированая дискретная последовательность {G} и графические пояснения к способу определения задержки сигнала показаны на графике И, фиг. 4.
На графике И, фиг. 4 выборка {G} из N отсчетов приведена с условной привязкой к времени. Отсчеты G вычисляются в зависимости от способа вычисления корреляции в блоке 6, либо последовательно с задержкой между отсчетами на время вычисления отсчета, либо все одновременно с задержкой на время обработки выборки {Q}. На графике И, фиг. 4 отсчеты {G} по номеру отсчета приурочены ко времени появления соответствующего синхроимпульса с блока 16.
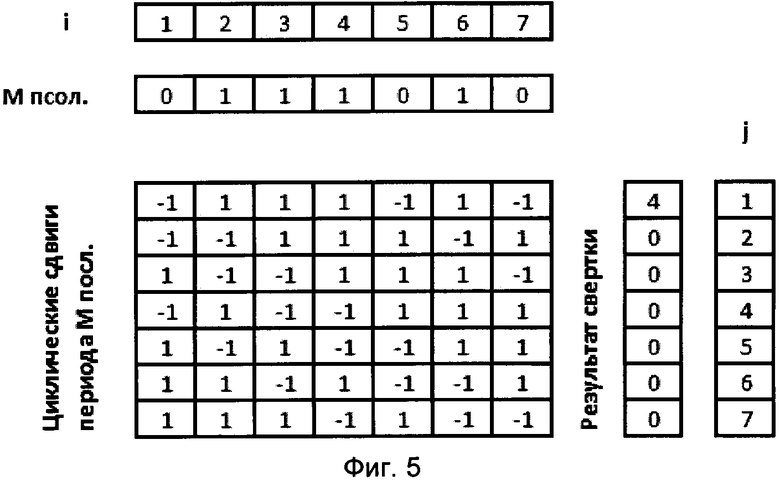
Один из аспектов изобретения основан на том наблюдении, что результатом циклической сверки одного периода M-последовательности длины N в алфавите 0, 1, с тем же периодом в котором нули замены на «-1», будет выборка, состоящая из нулей, либо (N+1)/2.
На фиг. 5 приведен пример, в котором показан один период M-последовательности, все циклические сдвиги той же M-последовательности, в которой нуль заменен на «-1», и результат сверки. «Результат свертки» - результаты, полученные почленным перемножением и последующим сложением результатов перемножения для строки M-последовательности и всех строк, содержащих циклические сдвиги M-последовательности, в которых нуль заменен на «-1».
Это позволяет использовать метод определения dt, получивший название Time-Dependent Charge Detection, в том числе когда в качестве зондирующих световых сигналов используются сигналы, модулированные M-последовательностью. Это связано с тем, что боковые лепестки вычисляемой корреляционной функции не накладываются (в силу их отсутствия согласно примера фиг. 5) на главный лепесток в виде равнобедренного треугольника. А это позволяет расширить возможности метода Time-Dependent Charge Detection, в том числе при использовании даже M-последовательностей с периодом 3, 7, 15, 31. Следует отметить, что в случае замены в M-последовательности 0 на 1, а 1 на «-1» подобный результат не получается.
В таблице на фиг. 14 приведена зависимость, показывающая как способ, основанный на предлагаемом устройстве, улучшает возможности метода Time-Dependent Charge Detection.
Столбец 1. Это n, а также число сложений, необходимое для вычисления одного отсчета циклической свертки с использованием алгоритма БПУ.
Столбец 2. Период M-последовательности.
Столбец 3. Показывает, во сколько улучшается соотношение сигнал/белый шум за счет предлагаемого способа.
Столбец 4. Показывает, во сколько раз подавляется постоянная составляющая в спектре шума (background light) за счет предлагаемого способа.
Столбец 5. Показывает, во сколько раз увеличивается разрешаемая дальность для метода Time-Dependent Charge Detection. Без способа - это T0·C/2
Приведем сравнение, которое основано на примере, приведенном в прототипе.
В прототипе число операций сложения для определения координат для варианта N=127 составляет 127∙127+16·127∙8=32385.
В рассматриваемом изобретении: вариант без использования БПУ
127·127=16129, т.е. выигрыш в 2 раза,
а с использованием БПУ
(127+1)∙log2(N+1)=128·7=1016,
т.е. выигрыш в 32 раза.
Кроме этого, сокращается частота работы АЦП в 8 раз, так как в прототипе M=8.
Опять вернемся к патенту US 7206062. Там указано, что на частотах до 130 МГЦ можно использовать АЦП и процессоры на КМОП технологиях. А с повышением частоты выше 1 ГГЦ (125·8=1 ГГЦ) рассеиваемая мощность на один элемент АЦП может составлять 0.5-6 Вт на одно быстродействующее АЦП (использованием 8-10), т.е. возрастает многократно, что не позволяет реализовывать компактные многоканальные системы 3D технического зрения с большим диапазоном разрешаемых дальностей.
Согласно фиг. 16:
Этап Э1. Создают генератором 2 создания модуляции в виде бинарной последовательности максимальной длины в бинарном оптическом сигнале циклическую импульсную M-последовательность. Для работы устройства необходимо передать как минимум три цикла M-последовательности. Если диапазон разрешаемых дальностей менее чем (N-1)∙T0, то можно излучать только часть третьего цикла (периода). Для варианта с использованием циклической свертки (корреляции) необходимо как минимум два следующих без пауз цикла.
Этап Э2. Передают источником излучения 1 на объект, модулированный на этапе Э1 бинарный оптический сигнал.
Этап Э3. Принимают отраженный сигнал от объекта светочувствительным элементом детектирования отраженного оптического сигнала от объекта 4.
Этап Э4. Передают его на блок интегрирования 9, где формируют дискретную последовательность (выборку) {Q}, путем интегрирования детектированного сигнала на периодах T0 с периодичностью T0 с помощью блока интегрирования 9.
Этап Э5. Начало каждого периода интегрирования T0 синхронизируют по синхроимпульсу с блока конъюнкции сигналов 11. Результату интегрирования Q ставят в соответствие номер синхроимпульса. Всего за период N·T0 формируют выборку из Q из N дискретных отсчетов.
Этап Э6. Результат интегрирования за промежуток времени T0 оцифровывают в дискретные отсчеты с помощью аналогово-цифрового преобразователя сигнала 5. Альтернативно, для обработки результатов интегрирования за период T0 для последующей обработки возможно использование, например, так называемых дискретно-аналоговых корреляторов, т.е. минуя этап Э6.
Этап Э7. Запоминают с помощью блока буферной памяти 10 каждый оцифрованный результат интегрирования в виде одного массива данных {QN}, где номер члена массива - это номер такта синхроимпульсов, с отсчетом тактов синхроимпульсов с момента начала приема Tстр. Моменту начала приема Tстр ставят в соответствие синхроимпульс с номером 1. Всего отбирают N последовательных отсчетов Q. Поскольку оцифровка и запись в память приходятся по времени на момент окончания интегрирования, синхроимпульсы на блоки 10 и 5 подаются с задержкой T0, производимой в блоке 16 «Задержка на T0».
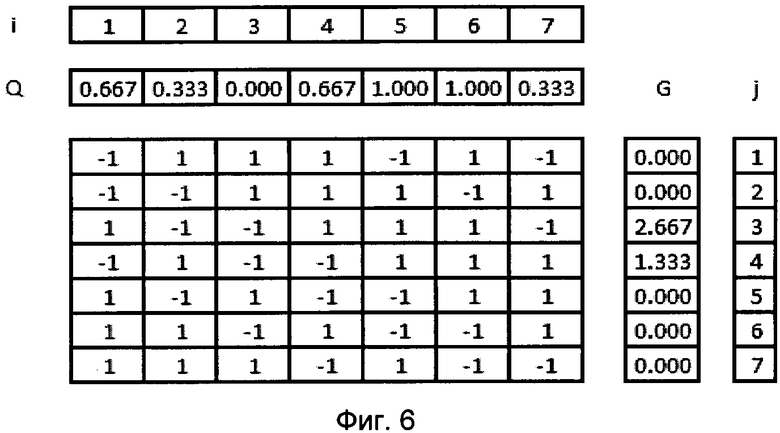
Этап Э8. Вычисляют члены выборки {G} в результате циклической свертки одного периода M-последовательности, в которой нули заменены на «-1» и выборкой {Q}.
Так, член выборки G1 получается путем почленного перемножения {Q} и выборки из периода M-последовательности, в котором нули заменены на «-1», и их последующего сложения. Член G2 получается путем почленного перемножения всех членов выборки {Q} и выборки из циклически сдвинутого на одну позицию периода M-последовательности, в котором нули заменены на «-1», и последующего сложения результатов почленного перемножения и так далее. Всего для последовательности из N возможен N-1 циклический сдвиг. Таким образом, получаются все N членов выборки {G}. На фиг. 6 приведен пример, который полностью соответствует графикам Ж и И, приведенным на фиг. 4, в матрице отражены все циклические сдвиги одного периода M-последовательности. Как только производится циклический сдвиг на одну позицию, член с номером 1 записывается на место члена с номером 2 и т.д., а последний член с номером N записывается на позицию 1. Это показано на фиг. 6.
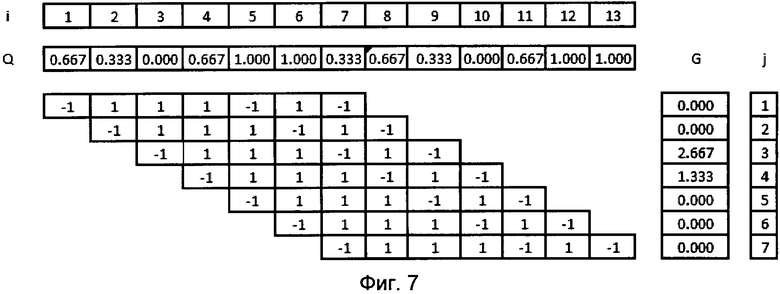
Вычисление циклической свертки может быть заменено на вычисление апериодической как показано на фиг. 7.
При этом в отличие от варианта циклической свертки для получения того же результата необходимо, чтобы излучаемая последовательность содержала не менее трех периодов (можно два целых и часть, если разрешаемый диапазон мене, чем (N-1)∙N0).
Этап Э10. Сравнивают значения полученных членов выборки {G1, …, GN} с пороговым значением. Выявляют превышение первого члена, превышающего порог (пусть номер этого члена i), запоминают последующий член, следующий за членом, превышающим порог рядом стоящих членов Gi и Gi+1 над уровнем порогового значения.
Этап Э11. Вычисляют время задержки принятого сигнала с помощью блока вычисления временной задержки отраженного сигнала 13 по формуле:
ΔT=T0∙(i-1)+Gi+1/(Gi+Gi+1)+k∙T0.
Этап Э12. Вычисляют с помощью модуля 8 вычисления расстояния до определяемого объекта по временной задержке отраженного сигнала расстояние L до объекта как:
L=C∙ΔT/2,
где C - скорость распространения электромагнитного сигнала в среде.
Промышленная применимость.
Предлагаемое оптическое устройство для определения расстояний до объекта может быть осуществлено специалистом на практике и при осуществлении обеспечивает реализацию заявленного назначения, что позволяет сделать вывод о соответствии критерию «промышленная применимость» для изобретения.
В соответствии с предложенным изобретением были проведены расчеты работы оптического устройства для определения расстояний до объекта.
Расчеты работы устройства показали, что оно обеспечивает возможность:
- сокращения количества операций, необходимых для вычисления расстояния до объекта,
- определения расстояний, превышающих порог дальности прототипа.
Покажем это на примере.
Пример 1 работы устройства с использованием трансверсального фильтра для определения расстояния до отражающей поверхности.
В рассматриваемом примере пусть n=3, N=7 (N=2n-1), k=0, Tстр.=N∙T0=7T0, R1=T0∙C/2, dD=6∙T0∙C/2.
Зондирующий сигнал - периодический бинарный оптический сигнал периода 7∙T0. Сигнал состоит из пауз и импульсов с постоянной мощностью излучения. Длительность пауз и импульсов одинакова и составляет T0. Паузе соответствует 0, импульсу - 1. Таким образом, осуществляется модуляция M-последовательностью [0111010]. Излучается по крайней мере три периода M-последовательности, что отражено на фиг. 4, график Б. Также на фиг. 4. отражены синхроимпульсы, подаваемые с блока 3, график А. Задержанный отраженный сигнал, детектированный приемником, показан на фиг. 4 на графике В. Синхроимпульсы, подаваемые с блока 11, отражены на фиг. 4 на графике Г. Отражение процесса интегрирования детектированного приемником сигнала показано на фиг. 4 на графике В, а на временных отрезках [0; T0] - на фиг. 4 на графике Д.
Синхроимпульсы, подаваемые с блока 16, отражены на фиг. 4 на графике Е. Сформированная дискретная последовательность Q на выходе блока 5 показана на фиг. 4 на графике Ж. Сформированная дискретная последовательность G и графические пояснения к способу определения задержки показаны на графике И, фиг. 4. На графике И, фиг. 4 выборка G из N отсчетов приведена с условной привязкой ко времени. Отсчеты G вычисляются в зависимости от способа вычисления корреляции в блоке 6, либо последовательно с задержкой между отсчетами на время вычисления отсчета, либо все одновременно с задержкой на время обработки выборки Q. На фиг. 4 на графике 3 отсчеты G приурочены ко времени появления переднего фронта синхроимпуса (фиг. 4, график Е) с соответствующим номером, отраженным на графике.
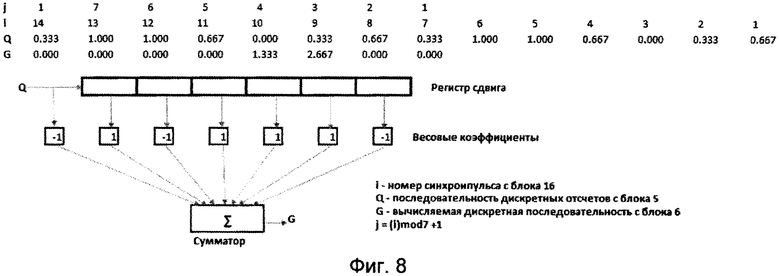
Для вычисления свертки используется трансверсальный фильтр, схема которого приведена на фиг. 8. Порядок вычисления последовательности G с использованием трансверсального фильтра (фиг. 8) отражен на фиг. 7.
В этом примере блок буферной памяти 10 не используется. Фильтр состоит из устройства запоминания N-1 отсчетов Q, представляющего собой сдвиговый регистр, и устройства суммирования входного отсчета, подаваемого на сдвиговый регистр, и N-1 отсчетов, считываемых из сдвигового регистра. Отсчеты подаются на устройство суммирования с весомыми коэффициентами (коэффициенты трансверсального фильтра), принимающими значения +1 и -1. Коэффициенты трансверсального фильтра согласно фиг. 8 определяются из исходной M-последовательности, используемой для модуляции передаваемого сигнала, путем замены в ней нулей на минус единицы.
Так, если для модуляции зондирующего сигнала используется M-последовательность [0, 1, 1, 1, 0, 1, 0], то коэффициенты для трансверсального фильтра будут согласно фиг. 8 [A1=-1; A2=1; A3=1; A4=1; A5=-1; A6=1; A7=-1]. Сформированная последовательность Q подается на трансверсальный фильтр (фиг. 8). На такте N=7 синхроимпульса с блока 16 (фиг. 3) считываем первый член выборки G, на такте N+1 - соответственно второй член выборки G. Номер члена выборки G соотносится с номером синхроимпульса с блока 16 (фиг. 3) по формуле j=(i)modN+1, где N=7, i - номер синхроимпульса с блока 16 (фиг. 3), a j - номер члена выборки G.
Первый отсчет (член выборки G): G1=0
Второй отсчет: G2=0
Третий отсчет: G3=2.6667
Четвертый отсчет: G4=1.3337
Пятый, шестой и седьмой отсчеты: G5=G6=G7=0
Видно, что отсчеты G3 и G4 больше нуля, т.е. превышают порог обнаружения. Пусть в этом варианте порог обнаружения равен 1.0. Берем первый отсчет, превышающий порог, - G3=Gпор. По его номеру путем отнимания единицы определяем равное 3 количество целых интервалов T0 в Tзад.
TOF=(3-1)·T0+dt.
Определим
dt=T0·(G4/(G3+G4))=T0·(1.333/4)=T0/3
Таким образом, расстояние до отражающей поверхности равно
L=2.333·T0·C/2.
Пример 2 работы устройства использованием вычисления циклической свертки для определения расстояния до отражающей поверхности.
Отличается от примера 1 тем, что излучается, по крайней мере, не три, а два периода M- последовательности. В этом примере используется блок буферной памяти 10 (фиг. 3). По синхроимпульсу с блока 16 (фиг. 3) с номером 7=N выборка Q, содержащая 7 отсчетов, переписывается в устройство вычисления циклической свертки. Порядок вычисления циклической светки описан в разделе этапа 8. Результатом вычисления является выборка G, содержащая 7 членов. Выборка G, получаемая в результате вычисления циклической свертки, отображена на фиг. 6.
Порядок определения L - расстояния до отражающей поверхности - полностью совпадает с порядком, описанным в предыдущем примере.
Можно вычислить циклическую свертку через БПУ, сократив число операций сложения при вычислении циклической свертки. В этом случае обязательно использование блока буферной памяти 10 (см. фиг. 11).
Покажем, как произвести указанное вычисление.
Сформируем ортогональную матрицу, отличающуюся от матрицы Уолша только перестановкой строк и столбцов и умножением на минус единицу. Назовем ее матрица А.
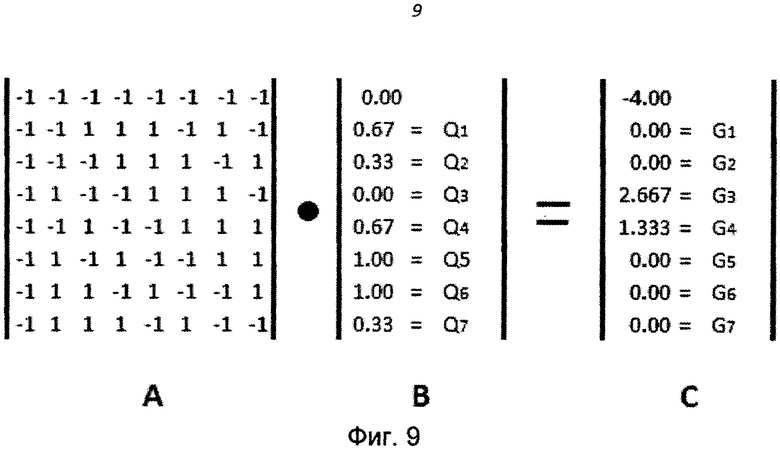
Для этого в исходной M-последовательности периода 23-1=7 заменим нули на «-1». Это будет первая строка формируемой матрицы 7×7. Сформируем все последующие строки матрицы, произведя последовательно все циклические сдвиги (вправо). Дополним все строки полученной матрицы «-1» слева. Дополним матрицу сверху строкой, состоящей из «-1». В результате операций из периода M-последовательности {0, 1, 1, 1, 0, 1, 0} получим матрицу А, отраженную на фиг. 9.
Сформируем из выборки Q вектор B длины N+1=8 для умножения на матрицу А, дополнив первую позицию в векторе нулем, а последующие позиции - элементами выборки Qi, получим вектор-столбец:
В={0,Q1,Q2,Q3,Q4,Q5,Q6,Q7},
приведенный на фиг. 9.
В результате умножения на матрицу А вектора В получим вектор C, также приведенный на фиг. 9.
Первая позиция вектора C представляет собой сумму всех элементов вектора В, умноженную на «-1», а последующие позиции содержат элементы выборки G.
Приведем матрицу А путем перестановки столбцов и умножения матрицы на «-1» к матрице Уолша, упорядоченной по Адамару.
Существуют эффективные быстрые алгоритмы умножения вектора-столбца на матрицу Уолша, упорядоченную по Уолшу и Адамару - БПУ.
Алгоритмы БПУ позволяют вычислять умножение вектора размерности 2n=N+1 на матрицу размерности 2n, использовав n∙2n операций сложения.
Покажем, как путем перестановки строк и столбцов привести матрицу А к матрице Уолша, упорядоченной по Адамару.
Действие 1. Возьмем любые три строки матрицы А, за исключением первой (верхней), состоящей из минус единиц. Допустим, это будут строки 2, 3, 4.
Действие 2. В полученной матрице заменим минус единицы на нули.
Действие 3. Столбцы полученной матрицы рассматриваем как двоичный код. Переведем столбцы матрицы, полученной в результате действия 2, в привычный десятичный код.
Пример выполнения действий 1, 2, 3 приведен на фиг. 10.
Действие 4. Упорядочим столбцы матрицы А в порядке возрастания в соответствии с десятичным кодом, полученным в результате действия 3. В результате получим матрицу А1, строки которой есть дискретные функции Уолша, умноженные на -1.
Действие 5. Упорядочим вектор-столбец в порядке возрастания в соответствии с десятичным кодом, полученным в результате действия 3. Результат упорядочивания вектор-столбец В1, матрица А1 и вектор В1 отражены на фиг. 11.
Действие 6. Сосчитаем в матрице А1 число смен знака в каждой строке и запишем результат в столбец Д (фиг. 12).
Действие 7. Запишем результат, полученный в столбце Д, в виде двоичного кода Грея столбец Е (фиг. 12).
Действие 8. Прочитаем столбец Е (фиг. 12) как двоичный код и результат как десятичный код запишем в столбец Ж (фиг. 12)
Действие 9. Упорядочим строки матрицы А1 и элементы вектора-столбца С в порядке возрастания чисел в столбце Ж. В результате получим матрицу А2 и вектор-столбец С1.
Матрица А2 отличается от матрицы Уолша, упорядоченной по Адамару, только умножением на минус единицу. Для получения вектора столбца С1 путем умножение вектора В1 на матрицу А2 с применением БПУ вычисляется с использованием только (N+1) log2(N+1) операций сложения.
На фиг. 13 отображен процесс вычисления циклической свертки с использованием БПУ по Адамару.
Действие 1. (фиг. 13.) Дискретная выборка Q из N членов переписывается из буферной памяти блок 10 (фиг. 3) в блок 6.
Действие 2. Все члены дискретной последовательности Q изменяют знак на противоположный.
Действие 3. Производим перестановку элементов выборки Q в соответствии с порядком их расположения в векторе В1 (фиг. 12) и добавляем в качестве первого члена вектора столбца В1 нуль.
Действие 4. Производим БПУ над вектором В1.
Действие 5. Записываем результат БПУ в виде вектора размерности N+1 и производим перестановки в соответствии с порядком членов G в векторе столбце С1 (фиг. 12) и отбрасываем первый результата БПУ.
Настоящее устройство позволяет сократить число операций сложения в зависимости от N. Действительно, число операций сокращается в N/log2(N+1).
Таким образом, в данном изобретении достигнута поставленная задача - увеличение снижение энергопотребления за счет снижения нагрузки на вычислительные модули.
Рекомендуется применять данное изобретение для:
- лазерной дальнометрии,
- трехмерного лазерного картографирования,
- систем технического зрения, в т.ч. и для летательных аппаратов, робототехнических систем, систем охраны и мониторинга за перемещением удаленных объектов,
- рефлектометрии оптических волокон, нахождения дефектов в оптоволоконных кабелях,
- устройств волоконно-оптического мониторинга удаленных протяженных объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЙ ДО ОБЪЕКТА | 2015 |
|
RU2605628C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЙ ДО ОБЪЕКТА | 2016 |
|
RU2626973C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЙ ДО ОБЪЕКТА | 2017 |
|
RU2653558C9 |
| УСТРОЙСТВО И СПОСОБ ПРИЕМА ОПТИЧЕСКОГО СИГНАЛА, ОТРАЖЕННОГО ОТ ЗОНДИРУЕМОГО ОБЪЕКТА | 2021 |
|
RU2778546C1 |
| СПОСОБ КОРРЕЛЯЦИОННОЙ ОБРАБОТКИ СИГНАЛОВ, ОТРАЖЕННЫХ ОТ БЫСТРОДВИЖУЩИХСЯ ЦЕЛЕЙ | 2005 |
|
RU2293997C1 |
| СПОСОБ ОЦЕНКИ ОТНОШЕНИЯ СИГНАЛ/ШУМ В УСТРОЙСТВАХ БЕСПРОВОДНОЙ СВЯЗИ | 2023 |
|
RU2809969C1 |
| Способ формирования радиолокационного изображения в радиолокационной станции с синтезированной апертурой антенны | 2016 |
|
RU2632898C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА ИЗОБРАЖЕНИЯ С ПОМОЩЬЮ МАТРИЧНЫХ ПРИБОРОВ С ЗАРЯДОВОЙ СВЯЗЬЮ | 2021 |
|
RU2766416C1 |
| Устройство формирования радиолокационного изображения в радиолокационной станции с синтезированной апертурой антенны | 2016 |
|
RU2619771C1 |
| ВЫСОКОСКОРОСТНОЙ КВАНТОВЫЙ ГЕНЕРАТОР СЛУЧАЙНЫХ ЧИСЕЛ НА ИНТЕРФЕРЕНЦИИ ЛАЗЕРНЫХ ИМПУЛЬСОВ С ИСПОЛЬЗОВАНИЕМ МНОГОКАНАЛЬНОГО АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАТЕЛЯ И СПОСОБ ФОРМИРОВАНИЯ СЛУЧАЙНОЙ ЧИСЛОВОЙ ПОСЛЕДОВАТЕЛЬНОСТИ С ЕГО ПОМОЩЬЮ | 2020 |
|
RU2758889C1 |


Изобретение относится к оптическим устройствам для определения расстояний до объекта. Устройство включает источник излучения модулированного бинарного оптического сигнала, генератор создания модуляции в виде бинарной последовательности максимальной длины, генератор тактового сигнала, светочувствительный элемент детектирования отраженного от объекта сигнала, аналогово-цифровой преобразователь, модуль вычисления корреляции излученного и отраженного сигналов, модуль порогового обнаружения сигнала, модуль вычисления расстояния до определяемого объекта по временной задержке отраженного сигнала. Устройство дополнительно включает блок интегрирования, блок буферной памяти, блок конъюнкции сигналов, блок формирования кратного синхроимпульса определения расстояния, блок вычисления временной задержки отраженного сигнала, блок преобразования нулевого сигнала в отрицательный. Технический результат - снижение энергопотребления устройства за счет снижения нагрузки на вычислительные модули. 3 з.п. ф-лы, 16 ил.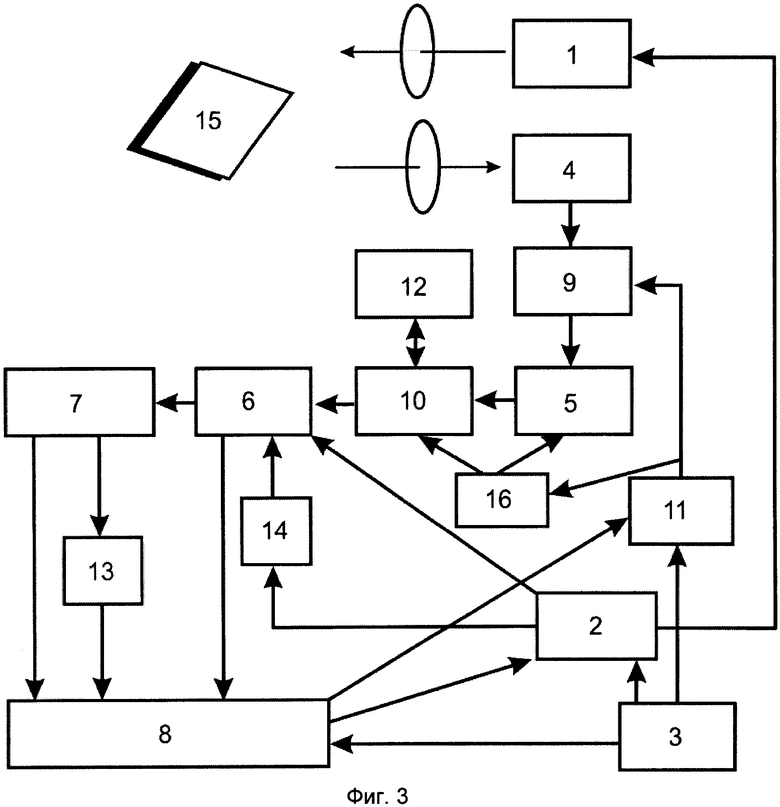
1. Оптическое устройство для определения расстояний до объекта, включающее в себя:
источник излучения на объект модулированного бинарного оптического сигнала, вход которого соединен с
выходом генератора создания модуляции в виде бинарной последовательности максимальной длины в бинарном оптическом сигнале, вход которого соединен с
выходом генератора тактового сигнала,
светочувствительный элемент детектирования отраженного оптического сигнала от объекта, выход которого соединен с
первым входом аналогово-цифрового преобразователя сигнала со светочувствительного элемента в цифровой сигнал, а
выход аналогово-цифрового преобразователя соединен с первым входом модуля вычисления корреляции излученного и отраженного сигналов, причем второй вход модуля вычисления корреляции излученного и отраженного сигналов соединен с выходом генератора создания модуляции в виде бинарной последовательности максимальной длины в бинарном оптическом сигнале, а
выход модуля вычисления корреляции излученного и отраженного сигналов соединен со входом модуля порогового обнаружения сигнала, выход которого соединен с
первым входом модуля вычисления расстояния до определяемого объекта по временной задержке отраженного сигнала, выход которого соединен со входом генератора создания модуляции в виде бинарной последовательности максимальной длины,
отличающееся тем, что
оптическое устройство для определения расстояний до объекта дополнительно включает в себя:
блок интегрирования, первый вход которого соединен с выходом светочувствительного элемента детектирования отраженного оптического сигнала от объекта, а выход которого соединен с входом аналогово-цифрового преобразователя сигнала,
блок буферной памяти, первый вход которого соединен с выходом аналогово-цифрового преобразователя, а выход которого соединен с первым входом модуля вычисления корреляции излученного и отраженного сигналов,
блок конъюнкции сигналов, первый вход которого соединен с выходом модуля вычисления расстояния до определяемого объекта по временной задержки отраженного сигнала, а второй вход которого соединен с выходом генератора тактового сигнала, а выход блока конъюнкции сигналов соединен со вторым входом блока интегрирования, вторым входом аналогово-цифрового преобразователя и вторым входом блока буферной памяти,
блок формирования кратного синхроимпульса, по которому содержимое ячеек блока буферной памяти переписывается в модуль вычисления корреляции, соединенный с блоком буферной памяти,
блок вычисления временной задержки отраженного сигнала, соединенный с выходом модуля порогового обнаружения сигнала и входом модуля вычисления расстояния до определяемого объекта по временной задержке отраженного сигнала,
блок преобразования нулевого сигнала в отрицательный, соединенный со входом модуля вычисления корреляции излученного и отраженного сигналов и с выходом генератора создания модуляции в виде бинарной последовательности максимальной длины в бинарном оптическом сигнале,
и тем, что выход модуля вычисления корреляции излученного и отраженного сигналов дополнительно соединен со вторым входом модуля вычисления расстояния до определяемого объекта по временной задержки отраженного сигнала.
2. Оптическое устройство по п. 1, отличающееся тем, что светочувствительный элемент детектирования отраженного оптического сигнала от объекта выполнен в виде элементов светочувствительной матрицы.
3. Оптическое устройство по п. 2, отличающееся тем, что элементы светочувствительной матрицы размещены на матрице вместе с устройствами интегрирования, в качестве которого применены структуры типа металл-диэлектрик-полупроводник, интегрирующие фототок.
4. Оптическое устройство по п. 1, отличающееся тем, что светочувствительный элемент детектирования отраженного оптического сигнала расположен на гиростабилизированной платформе.
| US 7202941 B2, 10.04.2007 | |||
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО ОБЪЕКТОВ С ПОМОЩЬЮ ПИКОСЕКУНДНЫХ ИМПУЛЬСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2195688C2 |
| Способ измерения расстояний до объекта и устройство для его осуществления | 1990 |
|
SU1779919A1 |
| WO 2012014077 A2, 02.02.2012. | |||

