[Область техники]
[0001]
Настоящее изобретение относится к способу и устройству для управления гибридным транспортным средством.
[Уровень техники]
[0002]
В гибридных транспортных средствах известно устройство управления, которое включает в себя средство задания целевой движущей силы двигателя и средство задания целевого значения (патентный документ 1). Средство задания целевой движущей силы двигателя вычисляет целевую движущую силу двигателя посредством деления требуемой мощности в лошадиных силах от батареи на скорость транспортного средства, чтобы получить частное, и вычитания частного из целевой движущей силы для транспортного средства. Средство задания целевого значения получает рабочую точку двигателя, в которой расход топлива является оптимальным, на основе целевой движущей силы двигателя и задает целевой крутящий момент двигателя и целевую скорость вращения входного вала автоматической коробки передач, используя рабочую точку. Средство задания целевого значения вычисляет целевую скорость вращения входного вала на основе характеристической кривой или карты скорости транспортного средства и скорости вращения входного вала относительно предварительно установленной движущей силы.
[Документ предшествующего уровня техники]
[Патентный Документ]
[0003]
Патентный документ 1: JP3997633B
[Сущность изобретения]
[Проблемы, решаемые изобретением]
[0004]
Когда скорость вращения двигателя исключительным образом определяется в отношении движущей силы приводного электрического мотора, как в вышеприведенном уровне техники, к сожалению, скорость вращения двигателя может быстро увеличиваться при ускорении при нажатии педали акселератора, потому что чувствительность скорости вращения приводного электрического мотора к положению педали акселератора выше, чем чувствительность двигателя. Соответственно, ощущение ускорения, воспринимаемое по звуку двигателя, отличается от намерения водителя ускоряться, и, таким образом, водитель может испытывать внезапное неприятное ощущение. Аналогичным образом, также при отпускании педали акселератора для замедления скорость вращения двигателя может быстро уменьшаться; следовательно, ощущение замедления, воспринимаемое из звука двигателя, отличается от намерения водителя замедляться, и, таким образом, водитель может испытывать внезапное неприятное ощущение. Такое неприятное ощущение особенно заметно в так называемом последовательном гибридном транспортном средстве, в котором двигатель используется для генерации мощности для приводного электрического мотора.
[0005]
Проблема, которая должна быть решена с помощью настоящего изобретения, состоит в том, чтобы предоставить способ и устройство для управления гибридным транспортным средством, которые способны ослабить чувство дискомфорта, испытываемое водителем.
[Средство для решения проблем]
[0006]
Настоящее изобретение обеспечивает способ управления гибридным транспортным средством, содержащим электрический мотор, который приводит в действие транспортное средство для движения, генератор, который подает мощность в электрический мотор, и двигатель, который приводит в действие генератор, и способ содержит этапы, на которых:
вычисляют величину или показатель изменения целевой движущей силы для транспортного средства;
устанавливают темп изменения скорости вращения двигателя в соответствии с величиной или показателем изменения целевой движущей силы; и
управляют скоростью вращения двигателя на основе темпа изменения скорости вращения двигателя, причем
скорость вращения двигателя управляется на основании темпа изменения скорости вращения двигателя в соответствии с величиной или показателем изменения целевой движущей силы с момента времени, в котором величина или показатель изменения целевой движущей силы становится предварительно определенным пороговым значением или больше, до истечения второго предварительно определенного времени, и
после истечения второго предварительно определенного времени скорость вращения двигателя управляется на основании предварительно определенного постоянного темпа изменения скорости вращения двигателя.
И настоящее изобретение обеспечивает способ управления гибридным транспортным средством, содержащим электрический мотор, который приводит в действие транспортное средство для движения, генератор, который подает мощность в электрический мотор, и двигатель, который приводит в действие генератор, причем способ содержит этапы, на которых:
вычисляют целевую движущую силу для транспортного средства; и
управляют скоростью вращения двигателя в соответствии с псевдодвижущей силой и фиксированной псевдодвижущей силой, причем псевдодвижущая сила постепенно приближается к целевой движущей силе до момента времени после первого предварительно определенного времени с задержкой по времени относительно целевой движущей силы, фиксировання псевдодвижущая сила представляет собой псевдодвижущую силу в моменте времени, в котором величина или показатель изменения целевой движущей силы становится предварительно определенным пороговым значением или больше.
[Эффект изобретения]
[0007]
В соответствии с настоящим изобретением, вместо того, чтобы задавать скорость вращения двигателя без исключения в отношении целевой движущей силы для транспортного средства, темп изменения скорости вращения двигателя определяется в соответствии с величиной или показателем изменения целевой движущей силы и управление осуществляется на основе темпа изменения; следовательно, даже когда абсолютное значение величины изменения или показателя изменения целевой движущей силы велико, быстрое увеличение или уменьшение скорости вращения двигателя может быть подавлено. В результате неприятное ощущение, испытываемое водителем, такое как внезапное неприятное ощущение, может быть смягчено.
[Краткое описание чертежей]
[0008]
Фиг. 1 - блок-схема, иллюстрирующая вариант осуществления гибридного транспортного средства, к которому применяется способ управления гибридным транспортным средством согласно настоящему изобретению.
Фиг. 2 - блок-схема управления, иллюстрирующая основную конфигурацию системы управления для гибридного транспортного средства по фиг. 1.
Фиг. 3 - блок-схема управления, иллюстрирующая основную конфигурацию блока вычисления целевой движущей силы по фиг. 2.
Фиг. 4 - блок-схема управления, иллюстрирующая основную конфигурацию блока вычисления заданной целевой скорости вращения двигателя по фиг. 2.
Фиг. 5 - блок-схема управления, иллюстрирующая основную конфигурацию блока вычисления конечной целевой скорости вращения двигателя по фиг. 2.
Фиг. 6 - блок-схема управления, иллюстрирующая основную конфигурацию блока вычисления для определения операции водителя по фиг. 5.
Фиг. 7 - блок-схема управления, иллюстрирующая основную конфигурацию блока вычисления по фиг. 5 для целевого темпа достижения заданной целевой скорости вращения двигателя.
Фиг. 8 - блок-схема управления, иллюстрирующая основную конфигурацию блока вычисления по фиг. 5 для целевого темпа изменения скорости вращения двигателя во время операции водителя.
Фиг. 9 - блок-схема управления, иллюстрирующая основную конфигурацию блока вычисления базовой целевой скорости вращения двигателя по фиг. 5.
Фиг. 10 является блок-схемой, иллюстрирующей основной контент обработки, выполняемый контроллером транспортного средства по фиг. 1 и 2.
Фиг. 11 представляет собой набор временных диаграмм, иллюстрирующих поведение соответствующих параметров в типичной сцене (во время ускорения) для гибридного транспортного средства, показанного на фиг. 1.
[Вариант(ы) осуществления настоящего изобретения]
[0009]
«Механическая конфигурация гибридного транспортного средства»
Фиг. 1 является блок-схемой, иллюстрирующей вариант осуществления гибридного транспортного средства, к которому применяется способ управления гибридным транспортным средством согласно настоящему изобретению. Гибридное транспортное средство 1 по настоящему варианту осуществления включает в себя двигатель 11, генератор 12, электрический мотор 13, батарею 14, ведущие колеса 15 и 15, ведущие оси 16 и 16 и дифференциальную передачу 17. Гибридное транспортное средство 1 по настоящему варианту осуществления представляет собой транспортное средство, в котором ведущие колеса 15 и 15 приводятся в движение только движущей силой электрического мотора 13, а не движущей силой двигателя 11. Этот тип гибридного транспортного средства 1 называется последовательным гибридным транспортным средством, в отличие от параллельного гибридного транспортного средства и гибридного транспортного средства с разделением мощности, поскольку двигатель 11, электрический мотор 13 и ведущие колеса 15 и 15 соединены последовательно (последовательное соединение).
[0010]
Двигатель 11 настоящего варианта осуществления управляется для запуска и остановки с помощью значения команды крутящего момента двигателя, которое вводится из контроллера 21 двигателя, что будет описано позже. Проворачивание коленчатого вала во время запуска осуществляется движущей силой от генератора 12, который выполнен в виде мотор-генератора. Затем управление впрыском топлива, управление количеством всасываемого воздуха, управление зажиганием и другое управление параметрами привода двигателя 11 выполняются в соответствии со значением команды крутящего момента двигателя, и двигатель 11 приводится в движение со скоростью вращения, определенной в соответствии со значением команды крутящего момента двигателя. Двигатель 11 имеет выходной вал 111, который механически соединен с вращающимся валом 121 генератора 12 через ускоряющую шестерню 112. Таким образом, когда двигатель 11 приводится в действие, вращающийся вал 121 генератора 12 вращается в соответствии с коэффициентом увеличения скорости ускоряющей шестерни 112 (который может быть постоянным коэффициентом увеличения скорости или переменным коэффициентом увеличения скорости). В результате генератор 12 вырабатывает электрическую мощность с величиной генерации мощности, соответствующей скорости вращения вращающегося вала 121.
[0011]
Двигатель 11 также служит нагрузкой при сбросе избыточной мощности, рекуперируемой электрическим мотором 13, что будет описано позже. Например, когда состояние заряда (SOC) батареи 14 является состоянием полного заряда или состоянием, близким к состоянию полного заряда, и желательно добиться торможения мотором посредством электрического мотора 13, электрическая мощность, рекуперируемая электрическим мотором 13, подается на генератор 12, который служит мотор-генератором. Таким образом, избыточная мощность может быть разряжена так, что генератор 12 эксплуатирует двигатель 11 без нагрузки, в котором впрыск топлива и зажигание прекращаются.
[0012]
Генератор 12 настоящего варианта осуществления служит не только в качестве генератора, но также в качестве мотора (электрического мотора) посредством управления переключением, выполняемого первым инвертором 141. Генератор 12 служит в качестве мотора при выполнении описанной выше операции проворачивания коленчатого вала во время запуска двигателя 11 или процесса разрядки избыточной мощности от электрического мотора 13. Достаточно, однако, что генератор 12 служит, по меньшей мере, в качестве генератора, чтобы реализовать способ и устройство для управления гибридным транспортным средством в соответствии с настоящим изобретением.
[0013]
Генератор 12 настоящего варианта осуществления электрически соединен с батареей 14 через первый инвертор 141, так что электрическая мощность может передаваться и приниматься. Кроме того, генератор 12 по настоящему варианту осуществления электрически соединен с электрическим мотором 13 через первый инвертор 141 и второй инвертор 142, так что электрическая мощность может передаваться и приниматься. Первый инвертор 141 преобразует мощность переменного тока, генерируемую генератором 12, в мощность постоянного тока и подает мощность постоянного тока на батарею 14 и/или второй инвертор 142. Первый инвертор 141 также преобразует мощность постоянного тока, подаваемую от батареи 14 и/или второго инвертора 142, в мощность переменного тока и подает мощность переменного тока в генератор 12. Первый инвертор 141 и генератор 12 управляются значением команды скорости вращения от контроллера 22 генератора, который будет описан позже.
[0014]
Батарея 14 настоящего варианта осуществления, которая состоит из вторичной батареи, такой как литий-ионная батарея, принимает и накапливает электрическую мощность, вырабатываемую генератором 12 через первый инвертор 141, а также принимает и накапливает электрическую мощность, рекуперируемую мотором 13 через второй инвертор 142. Хотя иллюстрация опущена, батарея 14 также может быть выполнена с возможностью зарядки от внешнего коммерческого источника питания. Батарея 14 по настоящему варианту осуществления подает накопленную электрическую мощность на электрический мотор 13 через второй инвертор 142 для приведения в действие электрического мотора 13. Батарея 14 по настоящему варианту осуществления также подает накопленную электрическую мощность на генератор 12, который служит в качестве мотора, через первый инвертор 141 для приведения в действие генератора 12, и выполняет проворот коленчатого вала двигателя 11, работу двигателя без нагрузки и т.д. Батарея 14 контролируется контроллером 23 батареи, который выполняет управление зарядкой/разрядкой в соответствии с состоянием заряда SOC. Что касается источника электропитания для электрического мотора 13 по настоящему варианту осуществления, батарея 14 может использоваться в качестве основного источника питания, в то время как генератор 12 может использоваться в качестве вспомогательного источника питания, или генератор 12 может использоваться в качестве основного источника питания, в то время как батарея 14 может использоваться в качестве вспомогательного источника питания. Для реализации способа и устройства для управления гибридным транспортным средством согласно настоящему изобретению батарея 14, как показано на фиг. 1, необязательна, и батарея 14 может быть опущена при необходимости, при условии, что предусмотрена батарея для проворота коленчатого вала двигателя 11, и номинальная генерируемая мощность генератора 12 достаточно велика для движения гибридного транспортного средства 1.
[0015]
Электрический мотор 13 по настоящему варианту осуществления имеет вращающийся вал 131, который соединен с входным валом 171 передачи дифференциальной передачи 17 посредством замедляющей передачи 132. Вращающий момент вращающегося вала 131 электрического мотора 13 передается на замедляющую передачу 132 и дифференциальную передачу 17. Дифференциальная передача 17 делит вращающий момент на правую и левую составляющие, которые соответственно передаются на правое и левое ведущие колеса 15 и 15 через правую и левую ведущие оси 16 и 16. Это позволяет ведущим колесам 15 и 15 вращаться в соответствии с крутящим моментом привода электрического мотора 13, и гибридное транспортное средство 1 движется вперед или назад. Коэффициент уменьшения скорости замедляющей передачи 132 может быть фиксированным коэффициентом уменьшения или также может быть переменным коэффициентом уменьшения. Например, трансмиссия может быть предусмотрена в качестве замены замедляющей передачи 132.
[0016]
Предусмотрен датчик 27 переключателя рычага переключения передач/датчик переключателя режима движения (который в дальнейшем также будет называться датчиком 27 S/M). Датчик 27 S/M включает в себя датчик переключателя рычага переключения передач, который обнаруживает переключатель рычага переключения передач. Переключатель рычага переключения передач представляет собой переключатель рычажного типа, который может выбирать любое из нейтрального положения, положения парковки, положения движения, положения заднего хода и положения тормоза. Переключатель рычага переключения передач обычно устанавливается на центральной консоли или тому подобном рядом с сиденьем водителя. Когда выбрано положение движения, электрический мотор 13 вращается в направлении, соответствующем направлению движения вперед транспортного средства, и, когда выбирается положение заднего хода, электрический мотор 13 вращается обратно в направлении, соответствующем направлению движения назад транспортного средства. Положение тормоза относится к положению, в котором целевая рекуперативная движущая сила электрического мотора 13 относительно скорости движения задается большей, и когда педаль акселератора отпускается, электрический мотор 13 осуществляет торможение двигателем, которое является достаточно большим, чтобы остановить гибридное транспортное средство 1 без использования тормоза. Датчик 27 S/M дополнительно включает в себя датчик переключателя режима движения, который обнаруживает переключатель режима движения. Переключатель режима движения относится, например, к кнопочному или дисковому переключателю для переключения между множеством режимов движения, таких как режим нормального движения, режим эко-движения и режим спортивного движения, в которых профили целевой движущей силы относительно скорости транспортного средства и положения педали акселератора различны (режимы движения будут описаны позже со ссылкой на фиг. 3). Переключатель режима движения обычно устанавливается на центральной консоли или тому подобном рядом с сиденьем водителя. Режим движения может быть установлен, когда переключатель рычага переключения передач установлен в положение движения или в положение тормоза.
[0017]
Электрический мотор 13 настоящего варианта осуществления служит не только в качестве мотора, но также и в качестве генератора (электрического генератора) посредством управления переключением, выполняемого вторым инвертором 142. Электрический мотор 13 служит в качестве генератора при зарядке вышеописанной батареи 14 в случае низкого уровня заряда SOC или когда требуется добиться торможения двигателя во время замедления. Однако достаточно, чтобы электрический мотор 13 служил по меньшей мере в качестве электрического мотора, чтобы реализовать способ и устройство для управления гибридным транспортным средством в соответствии с настоящим изобретением.
[0018]
Электрический мотор 13 настоящего варианта осуществления электрически соединен с батареей 14 через второй инвертор 142, так что электрическая мощность может передаваться и приниматься. Кроме того, электрический мотор 13 настоящего варианта осуществления электрически соединен с генератором 12 через первый инвертор 141 и второй инвертор 142, так что электрическая мощность может передаваться и приниматься. Второй инвертор 142 преобразует мощность постоянного тока, подаваемую от батареи 14 и/или первого инвертора 141, в мощность переменного тока и подает мощность переменного тока в электрический мотор 13. Второй инвертор 142 также преобразует мощность переменного тока, генерируемую электрическим мотором 13, в мощность постоянного тока и подает мощность постоянного тока на батарею 14 и/или первый инвертор 141. Второй инвертор 142 и электрический мотор 13 управляются значением команды крутящего момента привода от контроллера 24 электрического мотора, который будет описан позже.
[0019]
Как описано выше, в гибридном транспортном средстве 1 настоящего варианта осуществления, когда водитель нажимает педаль акселератора после включения выключателя питания и отпускания ручного тормоза, требуемый крутящий момент привода, соответствующий величине нажатия педали акселератора, вычисляется посредством контроллера 20 транспортного средства. Значение команды крутящего момента привода выводится на второй инвертор 142 и электрический мотор 13 через контроллер 24 электрического мотора, и электрический мотор 13 приводится в действие для генерирования крутящего момента, соответствующего значению команды крутящего момента привода. Это позволяет вращаться ведущим колесам 15 и 15, и гибридное транспортное средство 1 движется. В этой операции выполняется определение относительно того, следует ли приводить в действие двигатель 11, на основе входных значений от датчика 25 акселератора, датчика 26 скорости транспортного средства и датчика 27 S/M и состояния заряда батареи 14, контролируемого контроллером батареи 23, и когда необходимые условия удовлетворяются, гибридное транспортное средство 1 движется во время приведения в действие двигателя 11. Конфигурация системы управления будет описана ниже, включая управление приводом для двигателя 11.
[0020]
«Конфигурация системы управления для гибридного транспортного средства»
Фиг. 2 является блок-схемой управления, иллюстрирующей основную конфигурацию системы управления для гибридного транспортного средства 1 настоящего варианта осуществления, проиллюстрированного на фиг. 1. Как показано на фиг. 2, система управления по настоящему варианту осуществления включает в себя контроллер 23 батареи, датчик 25 акселератора, датчик 26 скорости транспортного средства и датчик 27 S/M в качестве элементов ввода, а также контроллер 21 двигателя, контроллер 22 генератора и контроллер 24 электрического мотора в качестве выходных целевых элементов. Соответствующие сигналы от входных элементов обрабатываются контроллером 20 транспортного средства и выводятся в качестве сигналов управления на выходные целевые элементы.
[0021]
Контроллер 23 батареи в качестве входного элемента вычисляет текущую доступную выходную мощность батареи (Вт) из текущего состояния заряда SOC (например, от 0% до 100%) и номинальной выходной мощности батареи 14, подлежащей мониторингу, и выводит вычисленную текущую доступную выходную мощность батареи (Вт) в блок 202 вычисления целевой генерируемой мощности. Датчик 25 акселератора в качестве входного элемента обнаруживает величину нажатия педали акселератора, которую водитель нажимает и отпускает, и выводит обнаруженную величину нажатия в качестве положения педали акселератора (например, от 0% до 100%) в блок 201 вычисления целевой движущей силы. Датчик 26 скорости транспортного средства в качестве входного элемента вычисляет скорость транспортного средства, например, на основе скорости вращения вращающегося вала 131 электрического мотора 13, степени уменьшения скорости замедляющей передачи 132 и радиуса ведущего колеса 15 и выводит вычисленную скорость транспортного средства в блок 201 вычисления целевой движущей силы, блок 202 вычисления целевой генерируемой мощности, блок 203 вычисления заданной целевой скорости вращения двигателя и блок 204 вычисления конечной целевой скорости вращения двигателя. Датчик 27 S/M в качестве входного элемента выводит сигнал переключения передач и сигнал режима в блок 201 вычисления целевой движущей силы, блок 203 вычисления заданной целевой скорости вращения двигателя и блок 204 вычисления конечной целевой скорости вращения двигателя. Сигнал переключения передач выбирается с помощью описанного выше переключателя рычага переключения передач (любое из нейтрального положения, положения парковки, положения движения, положения заднего хода и положения тормоза). Сигнал режима выбирается с помощью описанного выше переключателя режима движения (любое из режима нормального движения, режима эко-движения и режима спортивного движения).
[0022]
Предусмотрен блок 205 вычисления целевого крутящего момента двигателя, который вычисляет значение команды крутящего момента двигателя. Значение команды крутящего момента двигателя вводится в контроллер 21 двигателя в качестве выходного целевого элемента. На основе значения команды крутящего момента двигателя контроллер 21 двигателя управляет параметрами привода двигателя 11, такими как количество всасываемого воздуха, объем впрыска топлива и зажигание двигателя 11, чтобы управлять приведением в действие двигателя 11. Блок 204 вычисления конечной целевой скорости вращения двигателя вычисляет значение команды скорости вращения генератора, которое вводится в контроллер 22 генератора в качестве выходного целевого элемента. На основе значения команды скорости вращения генератора контроллер 22 генератора управляет электрической мощностью, подаваемой в генератор 12. Значение команды скорости вращения генератора является значением команды работы для генератора 12, соединенного с двигателем 11. Блок 201 вычисления целевой движущей силы вычисляет значение команды крутящего момента приводного мотора, которое вводится в контроллер 24 электрического мотора в качестве выходного целевого элемента. Контроллер 24 электрического мотора управляет электрической мощностью, подаваемой в электрический мотор 13. Значение команды крутящего момента приводного мотора является основным значением команды для управления гибридным транспортным средством 1 для движения в соответствии с работой акселератора водителя.
[0023]
Далее будет описана конфигурация контроллера 20 транспортного средства. Контроллер 20 транспортного средства обрабатывает соответствующие сигналы от вышеописанных входных элементов и выводит управляющие сигналы на выходные целевые элементы. Контроллер 20 транспортного средства по настоящему варианту осуществления включает в себя блок 201 вычисления целевой движущей силы, блок 202 вычисления целевой генерируемой мощности, блок 203 вычисления заданной целевой скорости вращения двигателя, блок 204 вычисления конечной целевой скорости вращения двигателя и блок 205 вычисления целевого крутящего момента двигателя.
[0024]
Контроллер 20 транспортного средства выполнен в виде компьютера, на котором установлено аппаратное и программное обеспечение. Более конкретно, контроллер 20 транспортного средства выполнен с возможностью включать в себя постоянное запоминающее устройство (ROM), в котором хранятся программы, центральный процессор (CPU), который выполняет программы, хранящиеся в ROM, и оперативное запоминающее устройство (RAM), которое служит в качестве устройства хранения с возможностью доступа. Микропроцессорный блок (MPU), цифровой сигнальный процессор (DSP), специализированная интегральная схема (ASIC), программируемая пользователем вентильная матрица (FPGA) и т.п. могут использоваться в качестве рабочей схемы в качестве замены или дополнения к CPU. Вышеописанный блок 201 вычисления целевой движущей силы, блок 202 вычисления целевой генерируемой мощности, блок 203 вычисления заданной целевой скорости вращения двигателя, блок 204 вычисления конечной целевой скорости вращения двигателя и блок 205 вычисления целевого крутящего момента двигателя выполняют соответствующие функции, которые будут описаны позже, с помощью программного обеспечения, установленного в ROM. Аналогично, контроллер 21 двигателя, контроллер 22 генератора и контроллер 24 электрического мотора в качестве выходных целевых элементов и контроллер 23 батареи в качестве входного элемента каждый сконфигурированы как компьютер, на котором установлено аппаратное и программное обеспечение, то есть сконфигурированы с возможностью включать в себя ROM, в котором хранятся программы, CPU (или MPU, DSP, ASIC или FPGA), который выполняет программы, хранящиеся в ROM, и RAM, которое служит доступным устройством хранения.
[0025]
Фиг. 3 является блок-схемой управления, иллюстрирующей основную конфигурацию блока 201 вычисления целевой движущей силы по фиг. 2. Соответствующие сигналы о положении педали акселератора от датчика 25 акселератора, скорости транспортного средства от датчика 26 скорости транспортного средства, а также о положении переключения передач и режиме движения от датчика 27 S/M вводятся в блок 201 вычисления целевой движущей силы, который выводит целевую движущую силу Fd и значение команды крутящего момента приводного мотора. Контроллер 20 транспортного средства включает в себя память, в которой хранятся соответствующие карты управления в трех режимах движения, то есть в режиме спортивного движения, в режиме нормального движения и в режиме эко-движения, для каждого из положений переключения передач (положения движения и положения тормоза). Фиг. 3 иллюстрирует, сверху вниз, примеры карт управления в трех режимах движения из режима спортивного движения, режима нормального движения и режима эко-движения, когда выбрана позиция движения. Аналогичным образом, также сохраняются карты управления в трех режимах движения в режиме спортивного движения, в режиме нормального движения и в режиме эко-движения, когда выбрано положение тормоза. Три режима движения, соответствующие каждой позиции переключения, различаются по величине целевой движущей силы (вертикальная ось) по отношению к скорости транспортного средства (горизонтальная ось) и положению педали акселератора (несколько линий). В режиме спортивного движения целевая движущая сила в отношении скорости транспортного средства и положения педали акселератора задается относительно большой, в то время как в режиме эко-движения целевая движущая сила в отношении скорости транспортного средства и положения педали акселератора задается относительно малой или среднее значение задано в режиме нормального движения. Режимы движения для каждой позиции переключения соответствуют спецификациям движения настоящего изобретения.
[0026]
Соответствующие сигналы положения переключения передач и режима движения от датчика 27 S/M вводятся в блок 201 вычисления целевой движущей силы, который извлекает карту управления в режиме движения, соответствующем положению переключения передач, и извлекает соответствующую целевую движущую силу в соответствии с положением педали акселератора от датчика 25 акселератора и скоростью транспортного средства от датчика 26 скорости транспортного средства. Это используется в качестве целевой движущей силы водителя, которая преобразуется в блоке в целевой крутящий момент приводного мотора с использованием динамического радиуса ведущих колес 15 и коэффициента уменьшения скорости замедляющей передачи 132. Здесь, если полученный целевой крутящий момент приводного мотора превышает верхнее предельное значение крутящего момента, которое предварительно установлено, верхнее предельное значение крутящего момента задается в качестве целевого крутящего момента приводного мотора, тогда как если полученный целевой крутящий момент приводного мотора меньше нижнего предельного значения крутящего момента, которое предварительно установлено, нижнее предельное значение крутящего момента устанавливается в качестве целевого значения крутящего момента приводного мотора. Затем целевой крутящий момент приводного мотора, полученный таким образом, выводится в качестве значения команды крутящего момента приводного мотора в электрический мотор 13. Кроме того, целевой крутящий момент приводного мотора, полученный таким образом, преобразуется в блоке в целевую движущую силу Fd с использованием динамического радиуса ведущих колес 15 и коэффициента уменьшения скорости замедляющей передачи 132, и целевая движущая сила Fd выводится в блок 202 вычисления целевой генерируемой мощности, блок 203 вычисления заданной целевой скорости вращения двигателя и блок 204 вычисления конечной целевой скорости вращения двигателя.
[0027]
Блок 202 вычисления целевой генерируемой мощности по фиг. 2 умножает целевую движущую силу Fd из блока 201 вычисления целевой движущей силы на скорость транспортного средства от датчика 26 скорости транспортного средства, чтобы получить требуемую мощность приведения в действие, и вычитает доступную выходную мощность батареи, которая получена из контроллера 23 батареи, из требуемой мощности приведения в действие для получения базовой целевой генерируемой мощности. Генерируемая мощность, которая должна добавляться по мере необходимости (например, требуемая зарядная мощность, полученная из состояния заряда SOC батареи 14), добавляется к базовой целевой генерируемой мощности для получения целевой генерируемой мощности Pe. Когда полученная целевая генерируемая мощность Pe больше нуля, требуется электрическая мощность, превышающая доступную выходную мощность батареи 14; следовательно, блок 202 вычисления целевой генерируемой мощности выводит запрос на генерирование мощности двигателя с тем, чтобы двигатель 11 приводился в действие для генерации мощности генератором 12. Напротив, когда полученная целевая генерируемая мощность Pe не больше нуля, электрический мотор 13 может приводиться в действие мощностью, которая не превышает доступную выходную мощность батареи 14; следовательно, блок 202 вычисления целевой генерируемой мощности не выводит запрос на генерирование мощности двигателя. Целевая генерируемая мощность Pe, вычисленная блоком 202 вычисления целевой генерируемой мощности, выводится, как показано на фиг. 2, к блоку 203 вычисления заданной целевой скорости вращения двигателя и к блоку 205 вычисления целевого крутящего момента двигателя. Кроме того, запрос на генерирование мощности двигателя, определенный блоком 202 вычисления целевой генерируемой мощности, выводится, например, в качестве сигнала флага в блок 204 вычисления конечной целевой скорости вращения двигателя.
[0028]
Фиг. 4 - блок-схема управления, иллюстрирующая основную конфигурацию блока 203 вычисления заданной целевой скорости вращения двигателя по фиг. 2. Контроллер 20 транспортного средства включает в себя память, в которой хранится карта управления, как показано на фиг. 4, для скорости вращения двигателя, при которой достигается наилучшая топливная эффективность в отношении целевой генерируемой мощности Pe и карта управления, как показано на фиг. 4, для верхнего предельного темпа вращения двигателя в требовании управляемости относительно скорости транспортного средства и целевой движущей силы Fd. Целевая генерируемая мощность Pe, вычисленная блоком 202 вычисления целевой генерируемой мощности, вводится в блок 203 вычисления заданной целевой скорости вращения двигателя, который извлекает скорость вращения двигателя, при которой достигается наилучшая топливная эффективность, со ссылкой на карту управления, проиллюстрированную на Фиг. 4, для скорости вращения двигателя, при которой достигается наилучшая топливная эффективность по отношению к целевой генерируемой мощности Pe. Кроме того, соответствующие сигналы положения переключения передач и режима движения от датчика 27 S/M вводятся в блок 203 вычисления заданной целевой скорости вращения двигателя, который извлекает карту управления для верхнего предельного темпа вращения двигателя в требовании управляемости относительно соответствующей скорости транспортного средства и целевой движущей силы Fd и извлекает верхнюю предельную скорость вращения двигателя в соответствующем требовании управляемости в соответствии с положением педали акселератора из датчика 25 акселератора и скоростью транспортного средства из датчика 26 скорости транспортного средства.
[0029]
Затем скорость вращения двигателя, при которой достигается наилучшая топливная эффективность, сравнивается с верхней предельной скоростью вращения двигателя в требовании управляемости, и скорость вращения двигателя, меньшая, чем другая, извлекается. Когда эта скорость вращения меньше нижнего предела скорости вращения двигателя, нижний предел скорости вращения двигателя устанавливается в качестве заданной целевой скорости Nt вращения двигателя, тогда как когда эта скорость вращения превышает верхний предел скорости вращения двигателя для защиты двигателя 11, верхний предел скорости вращения двигателя устанавливается как заданная целевая скорость Nt вращения двигателя. Когда эта скорость вращения находится между нижним пределом и верхним пределом скорости вращения двигателя, эта скорость вращения двигателя устанавливается без каких-либо изменений в качестве заданной целевой скорости Nt вращения двигателя. Заданная целевая скорость Nt вращения двигателя выводится в блок 204 вычисления конечной целевой скорости вращения двигателя, как показано на фиг. 2. Вычисление заданной целевой скорости Nt вращения двигателя в блоке 203 вычисления заданной целевой скорости вращения двигателя выполняется независимо от того, выводится ли запрос генерирования мощности двигателя из блока 202 вычисления целевой генерируемой мощности, и блок 204 вычисления конечной целевой скорости вращения двигателя может быть выполнен с возможностью считывания заданной целевой скорости Nt вращения двигателя.
[0030]
Фиг. 5 - блок-схема управления, иллюстрирующая основную конфигурацию блока 204 вычисления конечной целевой скорости вращения двигателя по фиг. 2. Блок 204 вычисления конечной целевой скорости вращения двигателя включает в себя блок 2041 вычисления для определения операции водителя, блок 2042 вычисления для целевого темпа достижения заданной целевой скорости вращения двигателя, блок 2043 вычисления для целевого темпа изменения скорости вращения двигателя во время операции водителя, блок 2044 вычисления базовой целевой скорости вращения двигателя и блок 2045 вывода конечной целевой скорости вращения двигателя. Как показано на фиг. 2, соответствующие сигналы о положении переключения передач и режиме движения от датчика 27 S/M, скорости транспортного средства от датчика 26 скорости транспортного средства, заданной целевой скорости Nt вращения двигателя от блока 203 вычисления заданной целевой скорости вращения двигателя, целевой движущей силы Fd из блока 201 вычисления целевой движущей силы и запрос на генерирование мощности двигателя из блока 202 вычисления целевой генерируемой мощности вводятся в блок 204 вычисления конечной целевой скорости вращения двигателя, который выполняет процессы, которые будут описаны ниже, затем выводит значение команды скорости вращения генератора в контроллер 22 генератора и выводит конечную целевую скорость вращения двигателя в блок 205 вычисления целевого крутящего момента двигателя. Процессы, выполняемые блоком 2041 вычисления для определения операции водителя, блоком 2042 вычисления для целевого темпа достижения заданной целевой скорости вращения двигателя, блоком 2043 вычисления для целевого темпа изменения скорости вращения двигателя во время операции водителя, блоком 2044 вычисления базовой целевой скорости вращения двигателя и блоком 2045 вычисления конечной целевой скорости вращения двигателя, которые составляют блок 204 вычисления конечной целевой скорости вращения двигателя, будут описаны ниже в этом порядке.
[0031]
Как показано на фиг. 5, целевая движущая сила Fd, вычисленная блоком 201 вычисления целевой движущей силы, и целевая движущая сила Fd0 до предварительно определенного количества вычислений, которая предварительно удерживается, вводятся в блок 2041 вычисления для определения операции водителя, который вычисляет величину или показатель изменения целевой движущей силы. Здесь целевая движущая сила Fd0 до предварительно определенного количества вычислений является целевой движущей силой, вычисленной в процедуре за один раз заранее или за предварительно определенное количество раз заранее. Здесь может вычисляться величина изменения, полученная путем вычитания движущей силы Fd0 до предварительно определенного количества вычислений из текущей целевой движущей силы Fd, или также может вычисляться показатель изменения, полученный путем деления текущей целевой движущей силы Fd на целевую движущую силу Fd0 до предварительно определенного количества вычислений. В последующем описании вариант осуществления будет описан в предположении, что величина изменения (ΔFd=Fd-Fd0) рассчитывается путем вычитания движущей силы Fd0 до предварительно определенного количества вычислений из текущей целевой движущей силы Fd. Примеры величины изменений включают в себя положительную величину изменения и отрицательную величину изменения. Положительная величина изменения означает, что целевая движущая сила увеличивается, в то время как отрицательная величина изменения означает, что целевая движущая сила уменьшается. То есть, когда водитель приводит в действие акселератор, увеличение величины нажатия педали акселератора (запрос на ускорение) приводит к положительной величине изменения, а уменьшение величины нажатия педали акселератора (запрос на замедление) приводит к отрицательной величине изменения.
[0032]
Фиг. 6 является блок-схемой управления, иллюстрирующей основную конфигурацию блока 2041 вычисления для определения операции водителя. Когда величина изменения ΔFd, полученная блоком 2041 вычисления для определения операции водителя, является положительной величиной изменения, то есть величиной увеличения (запрос на ускорение), как проиллюстрировано на верхней левой диаграмме фиг. 6, выполняется определение, что водитель запрашивает увеличение движущей силы в течение периода, в котором величина изменения ΔFd не меньше, чем предварительно определенное первое пороговое значение J1 (пороговое значение определения операции водителя), в то время как выполняется определение, что водитель не запрашивает увеличение движущей силы в течение периода, в котором величина изменения ΔFd не превышает предварительно определенное второе пороговое значение J2 (пороговое значение определения операции, не связанной с водителем). Причина, по которой первый пороговое значение J1 установлено на значение, большее, чем второе пороговое значение J2, состоит в том, чтобы предотвратить колебание результата определения. Затем, как показано на верхней правой диаграмме фиг. 6, таймер используется для измерения времени от момента времени, в который величина увеличения целевой движущей силы становится первым пороговым значением J1 или более, и сигнал флага запроса водителя об увеличении движущей силы очищается в момент времени, в который предварительно определенное время T0 (проиллюстрированное как пороговое значение T0 на фиг.6) истекло. Предварительно определенное время T0 конкретно не ограничено, но составляет, например, несколько секунд. До тех пор, пока не истечет предварительно определенное время T0, скорость вращения двигателя 11 управляется на основе темпа изменения скорости вращения двигателя 11, подвергнутой процессу запаздывания первого порядка или тому подобному, который будет описан позже, и после истечения предварительно определенного времени T0 скорость вращения двигателя 11 управляется на основе целевой движущей силы Fd. Предварительно определенное время T0 является временем, в течение которого водитель запрашивает увеличение движущей силы. Другими словами, предварительно определенное время T0 является временем, в течение которого водитель определяет, что изменение скорости вращения двигателя происходит из-за операции акселератора, предназначенной для ускорения. Если изменение скорости вращения двигателя задерживается относительно предварительно определенного времени T0, водитель может, возможно, определить, что изменение не связано с операцией акселератора.
[0033]
Аналогично, когда величина изменения ΔFd, полученная блоком 2041 вычисления для определения операции водителя, является отрицательной величиной изменения, то есть величиной уменьшения (запрос на замедление), как показано на нижней левой диаграмме фиг. 6, выполняется определение, что водитель запрашивает уменьшение движущей силы в течение периода, в котором величина изменения ΔFd не меньше, чем предварительно определенное третье пороговое значение J3 (пороговое значение определения операции водителя), в то время как выполняется определение, что водитель не запрашивает уменьшение движущей силы в течение периода, в котором величина изменения ΔFd не превышает предварительно определенное четвертое пороговое значение J4 (пороговое значение определения операции, не связанной с водителем). Причина, по которой третье пороговое значение J3 установлено на значение, превышающее четвертое пороговое значение J4, заключается в том, чтобы предотвратить колебание результата определения. Затем, как показано на нижней правой диаграмме фиг. 6, таймер используется для измерения времени от момента времени, в который величина уменьшения целевой движущей силы становится третьим пороговым значением J3 или более, и сигнал флага запроса водителя на уменьшение движущей силы очищается во момент времени, в который прошло предварительно определенное время T0 (показанное как пороговое значение T0 на фиг.6). Предварительно определенное время T0 конкретно не ограничено, но составляет, например, несколько секунд. До тех пор, пока не истечет предварительно определенное время T0, скорость вращения двигателя 11 управляется на основе темпа изменения скорости вращения двигателя 11, подвергнутой процессу запаздывания первого порядка или тому подобному, который будет описан позже, и после истечения предварительно определенного времени T0 скорость вращения двигателя 11 управляется на основе целевой движущей силы Fd. Предварительно определенное время T0 является временем, в течение которого водитель запрашивает уменьшение движущей силы. Другими словами, предварительно определенное время T0 является временем, в течение которого водитель определяет, что изменение скорости вращения двигателя происходит из-за операции акселератора, предназначенной для замедления. Если изменение скорости вращения двигателя задерживается относительно предварительно определенного времени T0, водитель может, возможно, определить, что изменение не связано с операцией акселератора.
[0034]
Блок 2041 вычисления для определения операции водителя использует сигнал флага для вывода результата определения того, находится ли величина изменения целевой движущей силы на стороне увеличения или на стороне уменьшения, к блоку 2042 вычисления для целевого темпа достижения заданной целевой скорости вращения двигателя.
[0035]
Как показано на фиг. 5, целевая движущая сила Fd, вычисленная блоком 201 вычисления целевой движущей силы, сигнал флага определения водителя (сторона увеличения или сторона уменьшения целевой движущей силы), вычисленный блоком 2041 вычисления для определения операции водителя, и сигналы положения переключения передач и режима движения от датчика 27 S/M вводятся в блок 2042 вычисления для целевого темпа достижения заданной целевой скорости вращения двигателя (в дальнейшем также называемой просто блоком 2042 вычисления целевого темпа достижения), который выполняет процессы, которые будут описаны ниже, и затем выводит целевой темп достижения заданной целевой скорости вращения двигателя (сторона увеличения или сторона уменьшения целевой движущей силы) в блок 2043 вычисления для целевого темпа изменения скорости вращения двигателя во время операции водителя.
[0036]
Фиг. 7 является блок-схемой управления, иллюстрирующей основную конфигурацию блока 2042 вычисления целевого темпа достижения. Верхние блоки управления на фиг. 7 представляют процессы, выполняемые, когда целевая движущая сила увеличивается (запрос на ускорение), а нижние блоки управления по фиг. 7 представляют процессы, выполняемые, когда целевая движущая сила уменьшается (запрос на замедление). Сначала процессы, выполняемые, когда целевая движущая сила увеличивается, будут описаны со ссылкой на верхние блоки управления по фиг. 7. Как показано рамкой A1 с пунктирной линией в верхней части фиг. 7, целевая движущая сила Fd, вычисленная блоком 201 вычисления целевой движущей силы, подвергается процессу запаздывания первого порядка с использованием постоянной времени в качестве параметра. График в рамке A1 с пунктирной линией иллюстрирует движущую силу (вертикальная ось) относительно времени (горизонтальная ось). На этом графике пунктирная линия представляет целевую движущую силу, в то время как сплошная линия представляет движущую силу, подвергнутую процессу запаздывания первого порядка (далее по тексту упоминается как псевдодвижущая сила для вычисления скорости вращения двигателя или просто псевдодвижущая сила).
[0037]
Постоянная времени настоящего варианта осуществления установлена на небольшое значение в случае режима спортивного движения, установлена на большое значение в случае режима эко-движения или установлена на среднее значение в случае режима нормального движения в соответствии с сигналами положения переключения передач и режима движения от датчика 27 S/M. Таким образом, постоянная времени устанавливается так, что наклон возрастания псевдодвижущей силы является большим в режиме спортивного движения, тогда как наклон возрастания псевдодвижущей силы является небольшим в режиме эко-движения. Даже в том же режиме движения, когда положение переключения передач является положением тормоза, постоянная времени задается меньшей, чем та, когда положение переключения передач является положением движения, то есть наклон возрастания псевдодвижущей силы устанавливается относительно большим. В настоящем варианте осуществления процесс запаздывания первого порядка иллюстрируется как типичный процесс для величины или показателя изменения целевой движущей силы Fd, но настоящее изобретение не ограничивается использованием процесса запаздывания первого порядка, и достаточно того, что получается профиль, в котором движущая сила постепенно приближается к целевой движущей силе до момента времени после предварительно определенного времени с задержкой по времени относительно функции времени целевой движущей силы, то есть достаточно того, что получен профиль, в котором темп изменения псевдодвижущей силы постепенно уменьшается со временем. Профиль предпочтительно выполнен таким образом, что темп изменения псевдодвижущей силы увеличивается с увеличением величины или показателя изменения целевой движущей силы.
[0038]
Блок 2042 вычисления целевого темпа достижения поддерживает движущую силу, подвергнутую процессу запаздывания первого порядка, в качестве псевдодвижущей силы. Кроме того, блок 2042 вычисления целевого темпа достижения относится к сигналу флага определения водителя (сторона увеличения целевой движущей силы) из блока 2041 вычисления для определения операции водителя и, как показано рамкой A2 со сплошной линией в верхней части фиг. 7, поддерживает псевдодвижущую силу в момент времени, когда выполняется определение операции водителя, как фиксированную псевдодвижущую силу. Затем блок 2042 вычисления целевого темпа достижения вычисляет значение (от 0 до 1) или его процент (от 0% до 100%) путем деления разницы между псевдодвижущей силой и фиксированной псевдодвижущей силой на разницу между целевой движущей силой Fd и фиксированной псевдодвижущей силой. Это вычисленное значение используется в качестве целевого темпа достижения заданной целевой скорости вращения двигателя (сторона увеличения целевой движущей силы). Хотя подробности будут описаны позже, цель вычисления целевого темпа достижения псевдодвижущей силы для целевой движущей силы состоит в том, чтобы использовать его в качестве эталона при вычислении темпа изменения скорости вращения двигателя, которую желательно получить в конечном итоге в настоящем варианте осуществления и для получения скорости вращения двигателя, которая не дает неприятных ощущений.
[0039]
Процессы, выполняемые, когда целевая движущая сила уменьшается, как показано в нижних блоках управления на фиг. 7, могут быть получены как симметричные вышеописанным процессам, выполняемым, когда целевая движущая сила увеличивается. Процессы, выполняемые, когда целевая движущая сила уменьшается, будут описаны со ссылкой на нижние блоки управления по фиг. 7. Как показано рамкой B1 с пунктирной линией в нижней части фиг. 7, целевая движущая сила Fd, вычисленная блоком 201 вычисления целевой движущей силы, подвергается процессу запаздывания первого порядка с использованием постоянной времени в качестве параметра. График в рамке B1 с пунктирной линией иллюстрирует движущую силу (вертикальная ось) относительно времени (горизонтальная ось). На этом графике пунктирная линия представляет целевую движущую силу, в то время как сплошная линия представляет движущую силу, подвергнутую процессу запаздывания первого порядка (далее по тексту упоминается как псевдодвижущая сила для вычисления скорости вращения двигателя или просто псевдодвижущая сила).
[0040]
Постоянная времени настоящего варианта осуществления установлена на небольшое значение в случае режима спортивного движения, установлена на большое значение в случае режима эко-движения или установлена на среднее значение в случае режима нормального движения в соответствии с сигналами положения переключения передач и режима движения от датчика 27 S/M. Таким образом, постоянная времени устанавливается так, что наклон падения псевдодвижущей силы является большим в режиме спортивного движения, тогда как наклон падения псевдодвижущей силы является небольшим в режиме эко-движения. Даже в том же режиме движения, когда положение переключения передач представляет собой положение тормоза, постоянная времени задается меньшей, чем таковая, когда положение переключения передач является положением движения, то есть наклон падения псевдодвижущей силы устанавливается относительно большим. В настоящем варианте осуществления процесс запаздывания первого порядка иллюстрируется как типичный процесс для величины или показателя изменения целевой движущей силы Fd, но настоящее изобретение не ограничивается использованием процесса запаздывания первого порядка, и достаточно того, что получается профиль, в котором движущая сила постепенно приближается к целевой движущей силе до момента времени после предварительно определенного времени с задержкой по времени относительно функции времени целевой движущей силы, то есть достаточно того, что получен профиль, в котором темп изменения псевдодвижущей силы постепенно уменьшается со временем. Профиль предпочтительно выполнен таким образом, что темп изменения псевдодвижущей силы увеличивается с увеличением величины или показателя изменения целевой движущей силы.
[0041]
Блок 2042 вычисления целевого темпа достижения поддерживает движущую силу, подвергнутую процессу запаздывания первого порядка, в качестве псевдодвижущей силы. Кроме того, блок 2042 вычисления целевого темпа достижения относится к сигналу флага определения водителя (сторона уменьшения целевой движущей силы) из блока 2041 вычисления для определения операции водителя и, как показано рамкой B2 со сплошной линией в нижней части фиг. 7, поддерживает псевдодвижущую силу в момент времени, когда выполняется определение операции водителя, как фиксированную псевдодвижущую силу. Затем блок 2042 вычисления целевого темпа достижения вычисляет значение (от 0 до 1) или его процент (от 0% до 100%) путем деления разницы между псевдодвижущей силой и фиксированной псевдодвижущей силой на разницу между целевой движущей силой Fd и фиксированной псевдодвижущей силой. Это вычисленное значение используется в качестве целевого темпа достижения заданной целевой скорости вращения двигателя (сторона уменьшения целевой движущей силы). Хотя детали будут описаны позже, цель вычисления целевого темпа достижения псевдодвижущей силы до целевой движущей силы заключается в том, чтобы использовать его в качестве эталона при расчете темпа изменения скорости вращения двигателя, который желательно получить в конечном счете в настоящем варианте осуществления, и получить скорость вращения двигателя, которая не дает неприятных ощущений.
[0042]
темп достижения заданной целевой скорости вращения двигателя (сторона увеличения или сторона уменьшения целевой движущей силы), вычисленный блоком 2042 вычисления целевого темпа достижения, выводится, как показано на Фиг. 5, в блок 2043 вычисления для целевого темпа изменения скорости вращения двигателя во время операции водителя.
[0043]
Как показано на Фиг. 5, заданная целевая скорость вращения двигателя (когда запрошена генерация мощности) от блока 203 вычисления заданной целевой скорости вращения двигателя, целевой темп достижения целевой скорости вращения двигателя (сторона увеличения или сторона уменьшения целевой движущей силы) от блока 2042 вычисления целевого темпа достижения, сигнал флага определения операции водителя (сторона увеличения или сторона уменьшения целевой движущей силы) от блока 2041 вычисления для определения операции водителя, и конечная целевая скорость вращения двигателя до предопределенного количества вычислений, которая выводится из блока 2045 вывода конечной целевой скорости вращения двигателя, вводятся в блок 2043 вычисления для целевого темпа изменения скорости вращения двигателя во время операции водителя, который выполняет процессы, которые будут описаны ниже, а затем выводит целевой темп увеличения скорости вращения двигателя во время операции водителя или целевой темп уменьшения скорости вращения двигателя во время операции водителя в блок 2044 вычисления базовой целевой скорости вращения двигателя. Конечная целевая скорость вращения двигателя до предопределенного количества вычислений является конечной целевой скоростью вращения двигателя, которая выводится в процедуре за один раз заранее или за предварительно определенное количество раз заранее.
[0044]
Фиг. 8 представляет собой блок-схему управления, иллюстрирующую основную конфигурацию блока 2043 вычисления для целевого темпа изменения скорости вращения двигателя во время операции водителя. Верхние блоки управления на фиг. 8 представляют процессы, выполняемые при увеличении целевой движущей силы (запрос на ускорение), а нижние блоки управления на фиг. 8 представляют процессы, выполняемые при уменьшении целевой движущей силы (запрос на замедление). Сначала, процессы, выполняемые при увеличении целевой движущей силы, будут описаны со ссылкой на верхние блоки управления на фиг. 8. Как показано в рамке A3 со сплошной линией в верхней части фиг. 8, заданная целевая скорость Nt вращения двигателя (когда запрошена генерация мощности) от блока 203 вычисления заданной целевой скорости вращения двигателя и флаг сигнала определения операции водителя (сторона увеличения целевой движущей силы) от блока 2041 вычисления для определения операции водителя используются для поддержания целевой скорости вращения двигателя в момент времени, в который выполняется определение операции водителя, в качестве фиксированной скорости вращения двигателя, и значение, полученное путем вычитания фиксированной скорости вращения двигателя из заданной целевой скорости Nt вращения двигателя (величина изменения скорости вращения двигателя) умножается на целевой темп достижения целевой скорости вращения двигателя от блока 2042 вычисления целевого темпа достижения. Это потому, что темп достижения псевдодвижущей силы до целевой движущей силы (соответствующей профилю псевдодвижущей силы) должен быть сделан в соответствии с темпом изменения скорости вращения двигателя.
[0045]
Затем, целевая скорость вращения двигателя во время операции водителя получается путем добавления фиксированной скорости вращения двигателя к значению, полученному путем умножения целевого темпа достижения целевой скорости вращения двигателя на значение (величина изменения скорости вращения двигателя), которое получается путем вычитания фиксированной скорости вращения двигателя из заданной целевой скорости Nt вращения двигателя, и значение (величина увеличения), полученное путем вычитания конечной целевой скорости NF вращения двигателя до предварительно определенного количества вычислений из целевой скорости вращения двигателя во время операции водителя, определяется как целевой темп увеличения скорости вращения двигателя во время операции водителя NRu на один расчет (одна процедура). Целевой темп увеличения скорости вращения двигателя во время операции водителя NRu выводится, как показано на фиг. 5, в блок 2044 вычисления базовой целевой скорости вращения двигателя.
[0046]
Процессы, выполняемые, когда целевая движущая сила уменьшается, как показано в нижних блоках управления на фиг. 8, могут быть получены как симметричные вышеописанным процессам, выполняемым, когда целевая движущая сила увеличивается. То есть, как показано рамкой B3 со сплошной линией в нижней части фиг. 8, заданная целевая скорость Nt вращения двигателя (когда запрашивается генерация мощности) из блока 203 вычисления заданной целевой скорости вращения двигателя и сигнал флага определения операции водителя (сторона уменьшения целевой движущей силы) из блока 2041 вычисления для определения операции водителя используются для поддержки целевой скорости вращения двигателя в момент времени, в который производится определение операции водителя, в качестве фиксированной скорости вращения двигателя, и значение, полученное путем сложения фиксированной скорости вращения двигателя с заданной целевой скоростью Nt вращения двигателя (величина изменения скорости вращения двигателя), умножается на целевой темп достижения целевой скорости вращения двигателя из блока 2042 вычисления целевого темпа достижения. Это связано с тем, что темп достижения псевдодвижущей силы до целевой движущей силы (соответствующей профилю псевдодвижущей силы) должен быть выполнен, чтобы соответствовать темпу изменения скорости вращения двигателя.
[0047]
Затем целевая скорость вращения двигателя во время операции водителя получается путем вычитания из фиксированной скорости вращения двигателя значения, полученного путем умножения целевого темпа достижения целевой скорости вращения двигателя на величину (величину изменения скорости вращения двигателя), которая получается вычитанием заданной целевой скорости Nt вращения двигателя из фиксированной скорости вращения двигателя, и значение (величина уменьшения), полученное путем вычитания конечной целевой скорости NF вращения двигателя до предварительно определенного количества вычислений из целевого скорости вращения двигателя во время операции водителя, меняется на противоположное по знаку (абсолютное значение величины уменьшения) и определяется как целевой темп уменьшения скорости вращения двигателя во время операции водителя NRd за один расчет (одна процедура). Целевой темп уменьшения скорости вращения двигателя во время операции водителя NRd выводится, как показано на фиг. 5, к блоку 2044 вычисления базовой целевой скорости вращения двигателя.
[0048]
Как показано на фиг. 5, сигнал запроса на генерацию мощности двигателя от блока 202 вычисления целевой генерируемой мощности, целевой темп увеличения скорости вращения двигателя во время операции водителя или целевой темп уменьшения скорости вращения двигателя во время операции водителя из блока 2043 вычисления для целевого темпа изменения скорости вращения двигателя во время операции водителя, скорость транспортного средства от датчика 26 скорости транспортного средства, сигнал флага определения операции водителя (сторона увеличения или сторона уменьшения целевой движущей силы) из блока 2041 вычисления для определения операции водителя и конечная целевая скорость вращения двигателя до предварительно определенного количества вычислений из блока 2045 вывода конечной целевой скорости вращения двигателя вводятся в блок 2044 вычисления базовой целевой скорости вращения двигателя, который выполняет процессы, которые будут описаны ниже, а затем выводит базовую целевую скорость вращения двигателя (сторона увеличения или сторона уменьшения) в блок 2045 вывода конечной целевой скорости вращения двигателя.
[0049]
На фиг.9 показана блок-схема управления, иллюстрирующая основную конфигурацию блока 2044 вычисления базовой целевой скорости вращения двигателя. Верхние блоки управления на фиг. 9 представляют процессы, выполняемые, когда целевая движущая сила увеличивается (запрос на ускорение), а нижние блоки управления на фиг. 9 представляют процессы, выполняемые, когда целевая движущая сила уменьшается (запрос на замедление). Сначала процессы, выполняемые, когда целевая движущая сила увеличивается, будут описаны со ссылкой на верхние блоки управления на фиг. 9. Скорость транспортного средства от датчика 26 скорости транспортного средства вводится, и темп NRnu увеличения скорости вращения двигателя, когда блок 2041 вычисления для определения операции водителя по фиг. 5 определяет, что операция водителя не выполняется (это определение также будет упоминаться как определение операции, не связанной с водителем), извлекается из проиллюстрированной карты управления. Затем, когда определение операции водителя не выполнено, переключатель выбора используется для выбора целевого темпа увеличения скорости вращения двигателя во время определения NRnu операции, не связанной с водителем, извлеченной из проиллюстрированной карты управления. В случае, когда водитель нажимает и отпускает педаль акселератора, так что педаль акселератора работает последовательно, и в других аналогичных случаях движение со скоростью вращения с оптимальным потреблением топлива может быть затруднено, поскольку заданная целевая скорость Nt вращения двигателя (когда запрашивается генерация мощности) меняется последовательно. Соответственно, по прошествии предварительно определенного времени (пороговое значение T0), то есть во время определения операции, не связанной с водителем, предварительно определенный постоянный темп увеличения скорости вращения двигателя во время операции, не связанной с водителем (постоянный темп увеличения задается относительно скорости транспортного средства), как на проиллюстрированной карте управления, используется таким образом для обеспечения того, чтобы конечная целевая скорость NF вращения двигателя достигала заданной целевой скорости Nt вращения двигателя (когда запрашивается генерация мощности) в максимально короткий промежуток времени. Напротив, когда определение операции водителя выполнено, переключатель выбора используется для выбора целевого темпа увеличения скорости вращения двигателя во время операции водителя NRu из блока 2043 вычисления для целевого темпа изменения скорости вращения двигателя во время операции водителя.
[0050]
Затем целевой темп увеличения скорости вращения двигателя во время операции водителя или целевой темп увеличения скорости вращения двигателя во время операции, не связанной с водителем, выбранный переключателем выбора, сравнивается с каждым из нижнего предельного темпа увеличения скорости вращения двигателя и верхнего предельного темпа увеличения скорости вращения двигателя (проиллюстрированный компаратор «выбранное значение-высокое значение» и компаратор «выбранное значение-низкое значение»), и процесс ограничения выполняется таким образом, что целевой темп увеличения скорости вращения двигателя во время операции водителя или целевой темп увеличения скорости вращения двигателя во время операции, не связанной с водителем, выбранный переключателем выбора не опускается ниже нижнего предельного темпа увеличения скорости вращения двигателя и не превышает верхнего предельного темпа увеличения скорости вращения двигателя. Здесь причина ограничения нижнего предела с использованием нижнего предельного темпа увеличения скорости вращения двигателя состоит в том, чтобы позволить ощущению подъема звука двигателя лучше реагировать на ощущение ускорения транспортного средства. Вычисленный таким образом целевой темп увеличения скорости вращения двигателя (когда запрашивается генерация мощности) вводится в переключатель выбора вместе с предварительно определенным целевым темпом увеличения скорости вращения двигателя (когда генерация мощности не запрашивается). Когда запрос на генерирование мощности двигателя выдается из блока 202 вычисления целевой генерируемой мощности, показанного на фиг. 2, выбирается целевой темп увеличения скорости вращения двигателя (когда запрашивается генерация мощности), в то время как, когда запрос на генерирование мощности двигателя не выдается, выбирается целевой темп увеличения скорости вращения двигателя (когда генерация мощности не запрашивается). Затем целевой темп увеличения скорости вращения двигателя (когда запрашивается или не запрашивается генерация мощности), выбранный переключателем выбора, добавляется к конечной целевой скорости NF вращения двигателя до предварительно определенного количества вычислений, чтобы получить базовую целевую скорость NBu вращения двигателя. Базовая целевая скорость NBu вращения двигателя выводится в блок 2045 вывода конечной целевой скорости вращения двигателя.
[0051]
Процессы, выполняемые, когда целевая движущая сила уменьшается, как показано в нижних блоках управления на фиг. 9, могут быть получены как симметричные вышеописанным процессам, выполняемым, когда целевая движущая сила увеличивается. То есть скорость транспортного средства от датчика 26 скорости транспортного средства вводится, и темп NRnd уменьшения скорости вращения двигателя, когда блок 2041 вычисления для определения операции водителя по фиг. 5 определяет, что операция водителя не выполняется (это определение также будет упоминаться как определение операции, не связанной с водителем), извлекается из проиллюстрированной карты управления. Затем, когда определение операции водителя не выполнено, переключатель выбора используется для выбора целевого темпа уменьшения скорости вращения двигателя во время определения NRnd операции, не связанной с водителем, извлеченной из проиллюстрированной карты управления. В случае, когда водитель нажимает и отпускает педаль акселератора так, что педаль акселератора последовательно управляется, и в других аналогичных случаях, вождение со скоростью вращения с оптимальным потреблением топлива может быть затруднено, потому что заданная целевая скорость Nt вращения двигателя (когда запрашивается генерация мощности) изменяется последовательно. Соответственно, после истечения предварительно определенного времени (пороговое значение T0), то есть, во время определения операции, не связанной с водителем, предопределенный постоянный темп уменьшения скорости вращения двигателя во время операции, не связанной с водителем (постоянный темп уменьшения устанавливается по отношению к скорости транспортного средства), как в проиллюстрированной карте управления используется таким образом, чтобы позволить конечной целевой скорости NF вращения двигателя достигнуть заданной целевой скорости Nt вращения двигателя (когда запрашивается генерация мощности) в максимально короткий период времени. В отличие от этого, при определении операции водителя, переключатель выбора используется для выбора целевого темпа уменьшения скорости вращения двигателя во время операции водителя NRd от блока 2043 вычисления для целевого темпа изменения скорости вращения двигателя во время операции водителя.
[0052]
Затем, целевой темп уменьшения скорости вращения двигателя во время операции водителя или целевой темп уменьшения скорости вращения двигателя во время операции, не связанной с водителем, выбранный переключателем выбора сравнивается с каждым из нижнего предельного темпа уменьшения скорости вращения двигателя и верхнего предельного темпа уменьшения скорости вращения двигателя (иллюстрированный компаратор «выбранное значение-высокое значение» и компаратор «выбранное значение-низкое значение») и процесс ограничения выполняется таким образом, что темп уменьшения скорости вращения двигателя во время операции водителя или темп уменьшения скорости вращения двигателя во время операции, не связанной с водителем, выбранный переключателем выбора, не опускается ниже нижнего предельного темпа уменьшения скорости вращения двигателя и не превышает верхний предельный темп уменьшения скорости вращения двигателя. Здесь, причина для ограничения нижнего предела с использованием нижнего предельного темпа уменьшения скорости вращения двигателя состоит в том, чтобы позволить ощущению подъема звука двигателя лучше отвечать чувству замедлению транспортного средства. Вычисленный таким образом целевой темп уменьшения скорости вращения двигателя (когда запрашивается генерация мощности) вводится в переключатель выбора вместе с предварительно определенным целевым темпом уменьшения скорости вращения двигателя (когда генерация мощности не запрашивается). Когда выдается запрос на генерацию мощности двигателя из блока 202 вычисления целевой генерируемой мощности, иллюстрированного на фиг. 2, выбирается целевой темп уменьшения скорости вращения двигателя (когда запрашивается генерация мощности), в то время как, когда не выдается запрос на генерацию мощности двигателя, выбирается целевой темп уменьшения скорости вращения двигателя (когда генерация мощности не запрашивается). Затем, целевой темп уменьшения скорости вращения двигателя (когда генерация мощности запрашивается или не запрашивается), выбранный переключателем выбора, добавляется к конечной целевой скорости NF вращения двигателя до предопределенного количества вычислений для получения базовой целевой скорости вращения двигателя NBd. Базовая целевая скорость вращения двигателя NBd выводится в блок 2045 вывода конечной целевой вращения скорости двигателя.
[0053]
Ссылаясь еще раз на Фиг. 5, заданная целевая скорость Nt вращения двигателя (когда запрашивается генерация мощности) от блока 203 вычисления заданной целевой скорости вращения двигателя на Фиг. 2 и базовая целевая скорость вращения двигателя (сторона увеличения NBu или сторона уменьшения NBd) от блока 2044 вычисления базовой целевой скорости вращения двигателя вводятся в блок 2045 вывода конечной целевой скорости вращения двигателя. Когда выдается запроса на генерацию мощности двигателя из блока 202 вычисления целевой генерируемой мощности на Фиг. 2, блок 2045 вывода конечной целевой скорости вращения двигателя выбирает меньшую из заданной целевой скорости Nt вращения двигателя (когда запрашивается генерация мощности) и базовой скорости вращения двигателя (сторона увеличения NBu) и большую из выбранной скорости вращения двигателя и базовой скорости вращения двигателя (сторона уменьшения NBd). В случае, когда водитель нажимает и отпускает педаль акселератора так, что педаль акселератора последовательно управляется, и в других аналогичных случаях, вождение со скоростью вращения с оптимальным потреблением топлива может быть затруднено, потому что заданная целевая скорость Nt вращения двигателя (когда запрашивается генерация мощности) изменяется последовательно. Соответственно, по истечении предварительно определенного времени (пороговое значение T0) (то есть во время определения операции, не связанной с водителем), как описано со ссылкой на фиг. 9, тем самым используется предварительно определенный постоянный темп увеличения скорости вращения двигателя во время операции, не связанной с водителем, чтобы позволить конечной целевой скорости NF вращения двигателя достичь заданной целевой скорости Nt вращения двигателя (когда запрашивается генерация мощности). После этого заданная целевая скорость Nt вращения двигателя (когда запрашивается генерация мощности) используется для управления скоростью вращения двигателя. Заданная целевая скорость Nt вращения двигателя (когда запрашивается генерация мощности) определяется на основе целевой движущей силы Fd, как описано для блока 203 вычисления заданной целевой скорости вращения двигателя по фиг. 2. Выбранная таким образом скорость вращения двигателя выводится как конечная целевая скорость NF вращения двигателя в блок 205 вычисления целевого крутящего момента двигателя, показанный на фиг. 2. Кроме того, выбранная таким образом скорость вращения двигателя делится на коэффициент увеличения скорости ускоряющей передачи 112 для получения значения команды скорости вращения генератора для генератора 12, и эта команда выводится на контроллер 22 генератора.
[0054]
Когда запрос генерирования мощности двигателя не выдается из блока 202 вычисления целевой генерируемой мощности по фиг. 2, блок 2045 вывода конечной целевой скорости вращения двигателя выбирает меньшую из отдельно определенной заданной целевой скорости вращения двигателя (когда не запрашивается генерация мощности) и базовой скорости вращения двигателя (сторона увеличения NBu) и большую из выбранной скорости вращения двигателя и базовой скорости вращения двигателя (сторона уменьшения NBd). Выбранная таким образом скорость вращения двигателя выводится как конечная целевая скорость NF вращения двигателя в блок 205 вычисления целевого крутящего момента двигателя, показанный на фиг. 2. Кроме того, выбранная таким образом скорость вращения двигателя делится на коэффициент увеличения скорости ускоряющей передачи 112 для получения значения команды скорости вращения генератора для генератора 12, и эта команда выводится на контроллер 22 генератора.
[0055]
Обращаясь снова к фиг. 2, конечная целевая скорость NF вращения двигателя из блока 204 вычисления конечной целевой скорости вращения двигателя и целевая генерируемая мощность Pe из блока 202 вычисления целевой генерируемой мощности вводятся в блок 205 вычисления целевого крутящего момента двигателя, который делит целевую генерируемую мощность Pe на конечную целевую скорость NF вращения двигателя, чтобы получить базовый целевой крутящий момент двигателя, ограничивают верхний предел и нижний предел, используя предварительно определенный нижний предельный крутящий момент двигателя и верхний предельный крутящий момент двигателя, и затем вычисляют значение Te команды крутящего момента двигателя. Значение Te команды крутящего момента двигателя выводится на контроллер 21 двигателя, и двигатель 11 приводится в действие в соответствии со значением команды.
[0056]
Далее будет описан пример работы гибридного транспортного средства 1 вышеописанного варианта осуществления. Фиг. 10 - блок-схема, иллюстрирующая контент обработки, выполняемый контроллером 20 транспортного средства, а фиг. 11 является набором временных диаграмм (a) - (g), иллюстрирующих поведение соответствующих параметров в типичной сцене для гибридного транспортного средства 1. Процессы в блок-схеме последовательности операций на фиг. 10 повторяются с интервалами времени, например, 10 мсек.
[0057]
Фиг. 11 иллюстрирует состояние или сцену, в которой водитель ведет гибридное транспортное средство. Как показано на графике положения/времени педали акселератора на фиг. 11 (a), водитель нажимает педаль акселератора с постоянной величиной в течение времени от t0 до t1, затем дополнительно нажимает педаль акселератора в течение времени от t1 до t4 и поддерживает величину нажатия после времени t4. Настоящий вариант осуществления может применяться не только к гибридному транспортному средству, в котором водитель выполняет ручное вождение, но также к гибридному транспортному средству, имеющему так называемую автоматическую (автономную) функцию вождения, в которой такая операция акселератора выполняется в соответствии со значением команды акселератора, которое рассчитывается с использованием автоматической (автономной) функции вождения.
[0058]
Как показано на графике скорости/времени транспортного средства на фиг. 11 (b), операция акселератора водителя позволяет транспортному средству двигаться с постоянной скоростью в течение времени от t0 до t1, а затем ускоряться в момент времени t1, чтобы постепенно увеличивать скорость транспортного средства. Заряд батареи SOC/время на фиг. 11 (d) иллюстрируется разными толщинами линий, когда состояние заряда SOC батареи 14 является большим, средним и малым, а толщины линий изменения параметров на каждом графике на фиг. 11 (e) - (g) проиллюстрированы так, чтобы соответствовать состояниям заряда SOC (большой/средний/маленький) батареи 14. График движущей силы/времени на фиг. 11 (c) иллюстрирует целевую движущую силу Fd, вычисленную блоком 201 вычисления целевой движущей силы по фиг. 2, и псевдодвижущую силу (псевдодвижущая сила для вычисления скорости вращения двигателя), вычисленную блоком 2042 вычисления целевого темпа достижения по фиг. 5 и 7. График мощности/времени по фиг. 11 (e) иллюстрирует целевую мощность привода, требуемую для электрического мотора 13, соответствующую целевой движущей силе Fd и доступной выходной мощности батареи 14 (когда состояние заряда SOC батареи 14 большое/среднее/маленькое). График целевой генерируемой мощности/времени на фиг. 11 (f) иллюстрирует целевую генерируемую мощность, вычисленную блоком 202 вычисления целевой генерируемой мощности по фиг. 2 для каждого состояния заряда SOC (большой/средний/маленький) батареи 14. График скорости вращения двигателя/времени на фиг. 11 (g) иллюстрирует конечную целевую скорость NF вращения двигателя, вычисленную с помощью блока 2045 вывода конечной целевой скорости вращения двигателя по фиг. 5 для каждого состояния заряда SOC (большой/средний/маленький) батареи 14.
[0059]
На графике мощности/времени по фиг. 11 (e), при условии, что требуемая мощность привода изменяется в соответствии с графиком мощности/времени на фиг. 11 (e), когда водитель выполняет операцию акселератора, как показано на графике фиг. 11 (a), когда состояние заряда SOC батареи 14 является малым, требуемая мощность привода превышает доступную выходную мощность батареи в момент времени t2, и поэтому выдается запрос на увеличение генерации мощности двигателя, тогда как когда состояние заряда SOC батарея 14 является средним, запрос на увеличение генерации мощности двигателя аналогичным образом выдается в момент времени t3. Аналогично, когда состояние заряда SOC батареи 14 является большим, запрос на увеличение генерации мощности двигателя выдается в момент времени t5. Это продемонстрировано на графике генерируемой целевой мощности/времени на фиг. 11 (е). Когда целевая генерируемая мощность увеличивается (или уменьшается, хотя это не показано), скорость вращения двигателя 11 должна соответственно увеличиваться (или уменьшаться).
[0060]
В гибридном транспортном средстве 1 по настоящему варианту осуществления, когда скорость вращения двигателя 11 увеличивается или уменьшается, когда целевая генерируемая мощность увеличивается или уменьшается, если предпринята попытка быстрого увеличения или уменьшения скорости вращения, чтобы соответствовать целевой движущей силе Fd в течение времени t1-t4, как указано пунктирными линиями на графике на фиг. 11 (g), скорость вращения двигателя 11 должна быть быстро увеличена или уменьшена, поскольку чувствительность двигателя 11 к положению педали акселератора ниже, чем чувствительность электрического мотора 13. Соответственно, звук двигателя может резко увеличиваться, даже если водитель несильно нажимает на педаль акселератора, или звук двигателя может резко уменьшаться, даже если водитель несильно отпускает педаль акселератора, и, таким образом, может возникать внезапное неприятное ощущение у водителя. Дополнительно или в качестве альтернативы, если предпринята попытка увеличить или уменьшить скорость вращения двигателя 11, чтобы она соответствовала целевой движущей силе Fd в течение времени t4-t6 на графике на фиг. 11 (g), ощущение повышения или понижения звука двигателя может быть низким по отношению к ощущению ускорения или замедления транспортного средства, потому что движущая сила электрического мотора 13 увеличивается или уменьшается, чтобы соответствовать целевой движущей силе Fd, тогда как увеличение или уменьшение скорости вращения двигателя 11 невелико. В гибридном транспортном средстве 1 настоящего варианта осуществления скорость вращения двигателя 11 управляется, чтобы ослабить неприятное ощущение, такое как внезапное неприятное ощущение или неприятное ощущение при повышении или понижении звука двигателя.
[0061]
Таким образом, в такой сцене осуществляется следующее управление. На этапе S1, показанном на фиг. 10, соответствующие сигналы положения педали акселератора от датчика 25 акселератора, скорости транспортного средства от датчика 26 скорости транспортного средства и положения переключения передач и режима движения от датчика 27 S/M вводятся в блок 201 вычисления целевой движущей силы. На этапе S2 блок 201 вычисления целевой движущей силы выполняет процессы, показанные на фиг. 3, чтобы получить целевую движущую силу Fd и значение команды крутящего момента приводного мотора.
[0062]
На этапе S3 блок 202 вычисления целевой генерируемой мощности умножает целевую движущую силу Fd из блока 201 вычисления целевой движущей силы на скорость транспортного средства от датчика 26 скорости транспортного средства для получения целевой мощности вождения и вычитает доступную выходную мощность батареи, которая получается из контроллера 23 батареи, из целевой мощности привода для получения базовой целевой генерируемой мощности. Генерируемая мощность, которая должна добавляться по мере необходимости (например, требуемая зарядная мощность, полученная из состояния заряда SOC батареи 14), добавляется к базовой целевой генерируемой мощности для получения целевой генерируемой мощности Pe.
[0063]
На этапе S4 соответствующие сигналы целевой генерируемой мощности Pe, вычисленной с помощью блока 202 вычисления целевой генерируемой мощности, целевой движущей силы Fd, вычисленной с помощью блока 201 вычисления целевой движущей силы, и положения переключения передач и режима движения от датчика 27 S/M вводятся в блок 203 вычисления заданной целевой скорости вращения двигателя, который выполняет процессы, показанные на фиг. 4, чтобы получить заданную целевую скорость Nt вращения двигателя (когда запрашивается генерация мощности).
[0064]
На этапе S5 выполняется определение относительно того, была ли выполнена операция водителя, на основе результата определения операции водителя, вычисленного блоком 2041 вычисления для определения операции водителя, проиллюстрированным на фиг. 5 и 6. Когда определено, что была выполнена операция водителя, процесс переходит к этапу S6, в то время как при определении, что операция водителя не была выполнена, процесс переходит к этапу S8. Была ли выполнена операция водителя, определяется на основании того, превышает ли абсолютное значение величины увеличения или уменьшения целевой движущей силы Fd пороговое значение J1 или J3. То есть, когда величина нажатия или величина отпускания педали акселератора водителем больше, чем пороговое значение, выполняется определение, что операция водителя была выполнена, тогда как, когда величина нажатия или величина отпускания меньше порогового значения, выполняется определение, что никакая операция водителя не была выполнена. В сцене на фиг. 11, в общем, выполняется определение, что операция водителя была выполнена в течение времени от t1 до t4, и выполняется определение, что никакая операция водителя не была выполнена в течение времени от t0 до t1 и после времени t4.
[0065]
На этапе S6, как показано на фиг. 5, целевая движущая сила Fd, вычисленная блоком 201 вычисления целевой движущей силы, сигнал флага определения водителя (сторона увеличения или сторона уменьшения целевой силы движения), вычисленная блоком 2041 вычисления для определения операции водителя, и сигналы положения переключения передач и режима движения от датчика 27 S/M вводятся в блок 2042 вычисления целевого темпа достижения, который выполняет процессы, показанные на фиг. 7, чтобы рассчитать целевой темп достижения заданной целевой скорости вращения двигателя (сторона увеличения Ru или сторона уменьшения Rd целевой движущей силы). Согласно этапу S6, после времени t1, показанного на фиг. 11, получают профиль псевдодвижущей силы для вычисления скорости вращения двигателя, подвергаемой процессу запаздывания первого порядка относительно целевой движущей силы Fd (проиллюстрированный пунктирной линией на графике фиг. 11 (c)), и темп достижения псевдодвижущей силы до целевой движущей силы Fd в единицу времени после момента времени t1.
[0066]
На этапе S7, как показано на фиг. 5, заданная целевая скорость вращения двигателя (когда запрашивается генерация мощности) из блока 203 вычисления заданной целевой скорости вращения двигателя, целевой темп достижения целевой скорости вращения двигателя (сторона увеличения или сторона уменьшения целевой движущей силы) из блока 2042 вычисления целевого темпа достижения, сигнал флага определения операции водителя (сторона увеличения или сторона уменьшения целевой движущей силы) из блока 2041 вычисления определения операции водителя и конечная целевая скорость вращения двигателя до предварительно определенного количества вычислений, которая выводится из блока 2045 вывода конечной целевой скорости вращения двигателя, вводятся в блок 2043 вычисления для целевого темпа изменения скорости вращения двигателя во время операции водителя, который выполняет процессы, проиллюстрированные на фиг. 8 для вычисления целевого темпа увеличения скорости вращения двигателя во время операции NRu водителя или целевого темпа уменьшения скорости вращения двигателя во время операции NRd водителя.
[0067]
В соответствии с процессами на этапах S6 и S7 получают целевой темп увеличения скорости вращения двигателя во время операции NRu водителя или целевой темп уменьшения скорости вращения двигателя во время операции NRd водителя, соответствующий темпу достижения псевдодвижущей силы для вычисления скорости вращения двигателя, показанной на фиг. 11 (c), и скорость вращения двигателя 11 плавно изменяется, даже когда величина изменения целевой движущей силы Fd велика.
[0068]
Когда на этапе S5 выполняется определение, что не было выполнено ни одной операции водителя (например, в течение времени t0-t1 на фиг.11), процесс переходит к этапу S8. На этапе S8 вычисляется целевой темп изменения скорости вращения двигателя во время операции, не связанной с водителем (темп NRnu увеличения или темп NRnd уменьшения), когда никакая операция водителя не была выполнена.
[0069]
На этапе S9 сигнал запроса на генерацию мощности двигателя от блока 202 вычисления целевой генерируемой мощности, целевой темп увеличения скорости вращения двигателя во время операции водителя или целевой темп уменьшения скорости вращения двигателя во время операции водителя из блока 2043 вычисления для целевого темпа изменения скорости вращения двигателя во время операции водителя, скорость транспортного средства от датчика 26 скорости транспортного средства, сигнал флага определения операции водителя (сторона увеличения или сторона уменьшения целевой силы движения) из блока 2041 вычисления для определения операции водителя, и конечная целевая скорость вращения двигателя до предварительно определенного количества вычислений из блока 2045 вывода конечной целевой скорости вращения двигателя вводятся в блок 2044 вычисления базовой целевой скорости вращения двигателя, который выполняет процессы, проиллюстрированные на фиг. 9, чтобы вычислить базовую целевую скорость вращения двигателя (сторона увеличения NBu или сторона уменьшения NBd).
[0070]
На этапе S10, заданная целевая скорость Nt вращения двигателя (когда запрашивается генерация мощности) из блока 203 вычисления заданной целевой скорости вращения двигателя и базовая целевая скорость вращения двигателя (сторона увеличения NBu или сторона уменьшения NBd) от блока 2044 вычисления базовой целевой скорости вращения вводятся в блок 2045 вывода конечной целевой скорости вращения двигателя. Когда запрос на генерирование мощности двигателя выдается из блока 202 вычисления целевой генерируемой мощности, блок 2045 вывода конечной целевой скорости вращения двигателя выбирает меньшую из заданной целевой скорости Nt вращения двигателя (когда запрашивается генерация мощности) и базовой скорости вращения двигателя (сторона увеличения NBu) и большую из выбранной скорости вращения двигателя и базовой скорости вращения двигателя (сторона уменьшения NBd), таким образом, чтобы получить конечную целевую скорость NF вращения двигателя. Кроме того, выбранная таким образом скорость вращения двигателя делится на коэффициент увеличения скорости ускоряющей передачи 112, чтобы получить значение команды скорости вращения генератора для генератора 12.
[0071]
На этапе S11 конечная целевая скорость NF вращения двигателя из блока 204 вычисления конечной целевой скорости вращения двигателя и целевая генерируемая мощность Pe из блока 202 вычисления целевой генерируемой мощности вводятся в блок 205 вычисления целевого крутящего момента двигателя, который делит конечную целевую скорость NF вращения двигателя на целевую генерируемую мощность Pe, чтобы получить базовый целевой крутящий момент двигателя, ограничивает верхний предел и нижний предел, используя предварительно определенный нижний предельный крутящий момент двигателя и верхний предельный крутящий момент двигателя, а затем вычисляет значение Te команды крутящего момента двигателя. Значение Te команды крутящего момента выводится в контроллер 21 двигателя, а двигатель 11 приводится в соответствии со значением команды. В блоке 2041 вычисления для определения операции водителя по фиг. 6, таймер используется для измерения времени от момента времени, в котором величина увеличения целевой движущей силой становится первым пороговым значением J1 или более или момента времени, в котором величина уменьшения целевой движущей силы становится третьим пороговым значением J3 или более, и сигнал флага запроса водителя на увеличение или уменьшение движущей силы очищается в момент времени, когда истекло предварительно определенное время T0 (иллюстрированное как пороговое значение T0 по фиг.6). До истечения предварительно определенного времени T0, таким образом, скорость вращения двигателя 11 управляется на основе темпа изменения скорости вращения двигателя 11, подвергаемой вышеописанному процессу запаздывания первого порядка или тому подобному, но после того, как предварительно определенное время T0 прошло, операция водителя не будет выполнена на этапе S5 по фиг. 10, и процесс, следовательно, переходит к этапу S8, на котором скорость вращения двигателя 11 управляется на основании целевой движущей силы Fd.
[0072]
Как описано выше, в соответствии со способом и устройством для управления гибридным транспортным средством 1 настоящего варианта осуществления, темп изменения скорости вращения двигателя 11 устанавливается в соответствии с величиной или показателем изменения целевой движущей силы; поэтому, даже если величина увеличения или темп увеличения целевой движущей силы является большой, быстрое увеличение скорости вращения двигателя 11 может быть подавлено, в то время как даже если величина уменьшения или темп уменьшения целевой движущей силы является большой, быстрое уменьшение скорости вращения двигателя 11 может быть подавлено. В результате, неприятные ощущения, воспринимаемые водителем, такие как внезапное неприятное ощущение, могут быть смягчены. Другими словами, водитель может почувствовать изменение звука двигателя и указание тахометра двигателя в ответ на операцию акселератора без неприятного ощущения.
[0073]
В соответствии со способом и устройством управления для гибридного транспортного средства настоящего варианта осуществления, когда темп изменения скорости вращения двигателя устанавливается в соответствии с величиной или показателем изменения целевой движущей силы, темп изменения скорости вращения двигателя устанавливается выше по мере увеличения величины или показателя изменения целевой движущей силы; поэтому неприятное ощущение, воспринимаемое водителем, например, внезапное неприятное ощущение, может быть облегчено, и в то же время водитель может почувствовать изменение звука двигателя и указание на тахометр двигателя в ответ на операцию акселератора.
[0074]
В соответствии со способом и устройством для управления гибридным транспортным средством настоящего варианта осуществления, когда темп изменения скорости вращения двигателя 11 устанавливается в соответствии с величиной или показателем изменения целевой движущей силы, темп изменения скорости вращения двигателя 11 устанавливается в соответствии с псевдодвижущей силой, полученной путем подвергания целевой движущей силы процессу запаздывания первого порядка; поэтому, как показано во времени t1-t4 по фиг. 11(g), даже когда величина увеличения или темп увеличения целевой движущей силы является большой, быстрое увеличение скорости вращения двигателя 11 может быть подавлено, в то время как даже когда величина уменьшения или темп уменьшения целевой движущей силы является большой, быстрое снижение скорости вращения двигателя 11 может быть подавлено. В результате, неприятные ощущения, воспринимаемые водителем, такие как внезапное неприятное ощущение, могут быть смягчены. Кроме того, в течение времени t4-t6 на графике по фиг. 11(g), темп увеличения (или темп уменьшения) скорости вращения двигателя 11 становится больше, чем те, которые указаны пунктирными линиями в фигуре по отношению к ощущению ускорения (ощущению замедления) транспортного средства; поэтому повышение или понижение звука двигателя и изменение в индикации тахометра двигателя могут отвечать на чувство ускорения или замедления транспортного средства. Другими словами, водитель может почувствовать изменение звука двигателя и указания тахометра двигателя в ответ на операцию акселератора без неприятного ощущения. Кроме того, когда темп увеличения (или темп уменьшения) скорости вращения двигателя 11 делается равным предварительно определенному значению или более с использованием нижнего предельного темпа увеличения скорости вращения двигателя, повышение или понижение звука двигателя и изменение индикации тахометра двигателя может лучше реагировать на ощущение ускорения или замедления транспортного средства.
[0075]
Согласно способу и устройству для управления гибридным транспортным средством согласно настоящему варианту осуществления темп изменения скорости вращения двигателя 11 устанавливается равным значению, коррелирующему с темпом достижения псевдодвижущей силы до целевой движущей силы; следовательно, даже когда происходит задержка в скорости вращения двигателя, скорость вращения становится скоростью, соответствующей изменению целевой движущей силы. Таким образом, водитель может чувствовать изменение звука двигателя и индикации тахометра двигателя в ответ на операцию акселератора без неприятного ощущения.
[0076]
Согласно способу и устройству для управления гибридным транспортным средством настоящего варианта осуществления, когда возможна настройка для множества спецификаций движения, в которых профили целевой движущей силы, которые установлены относительно скорости движения и положения педали акселератора, различны, постоянная времени процесса запаздывания первого порядка задается меньшей по мере того, как целевая движущая сила, установленная в отношении скорости движения, увеличивается в спецификациях движения, и поэтому водитель может чувствовать изменение звука двигателя и индикации тахометра двигателя в ответ на операцию акселератора и заданные спецификации движения без неприятного ощущения.
[0077]
Согласно способу и устройству для управления гибридным транспортным средством по настоящему варианту осуществления электрический мотор управляется на основе целевой движущей силы, которая не подвергается процессу запаздывания первого порядка, и, следовательно, фактическое ощущение движения транспортного средства реагирует на операцию ускорителя. Таким образом, подавляется ощущение ускорения/замедления, отличное от звука двигателя.
[0078]
Согласно способу и устройству для управления гибридным транспортным средством по настоящему варианту осуществления, после истечения предварительно определенного времени скорость вращения двигателя 11 управляется на основе заранее определенного постоянного темпа изменения скорости вращения двигателя и скорость вращения двигателя 11, следовательно, может быть определена так, что ускорение или замедление транспортного средства переводится в устойчивое состояние. Таким образом, водитель может чувствовать изменение звука двигателя и индикации тахометра двигателя в ответ на операцию акселератора без неприятного ощущения.
[0079]
Согласно способу и устройству для управления гибридным транспортным средством по настоящему варианту осуществления, когда требуемая мощность, соответствующая целевой движущей силе, недостаточна с мощностью, подаваемой от батареи на электрический мотор, мощность, включая недостаточную мощность, подается от генератора в электрический мотор; следовательно, водитель может чувствовать изменение звука двигателя и индикации тахометра двигателя в ответ на операцию акселератора без неприятного ощущения, и, в дополнение к этому, может быть достигнуто удовлетворительное движение транспортного средства относительно целевой движущей силы.
[Описание ссылочных обозначений]
[0080]
1 Гибридное транспортное средство
11 Двигатель
111 Выходной вал
112 Ускоряющая передача
12 Генератор
121 Вращающийся вал
13 Электрический мотор
131 Вращающийся вал
132 Замедляющая передача
14 Батарея
141 Первый инвертор
142 Второй инвертор
15 Ведущее колесо
16 Ведущая ось
17 Дифференциальная передача
171 Входной вал передачи
20 Контроллер транспортного средства
21 Контроллер двигателя
22 Контроллер генератора
23 Контроллер батареи
24 Контроллер электрического мотора
25 Датчик ускорения
26 Датчик скорости транспортного средства
27 Датчик переключателя рычага переключения передач/датчик переключателя режима движения
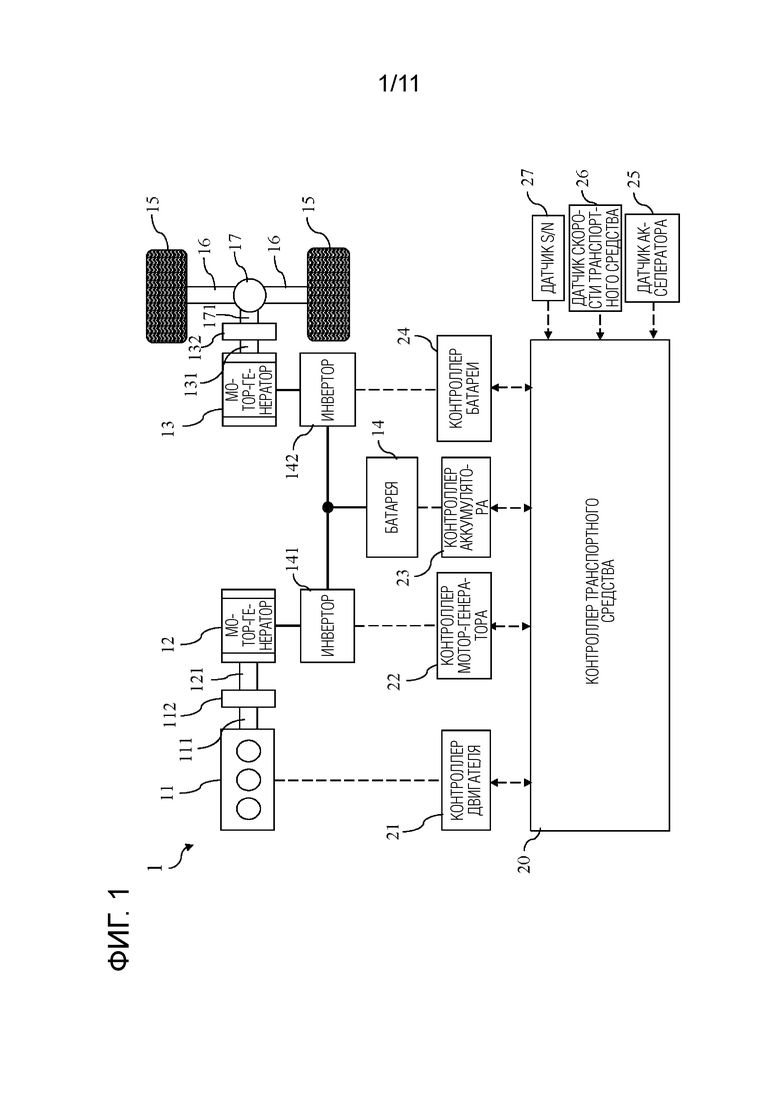
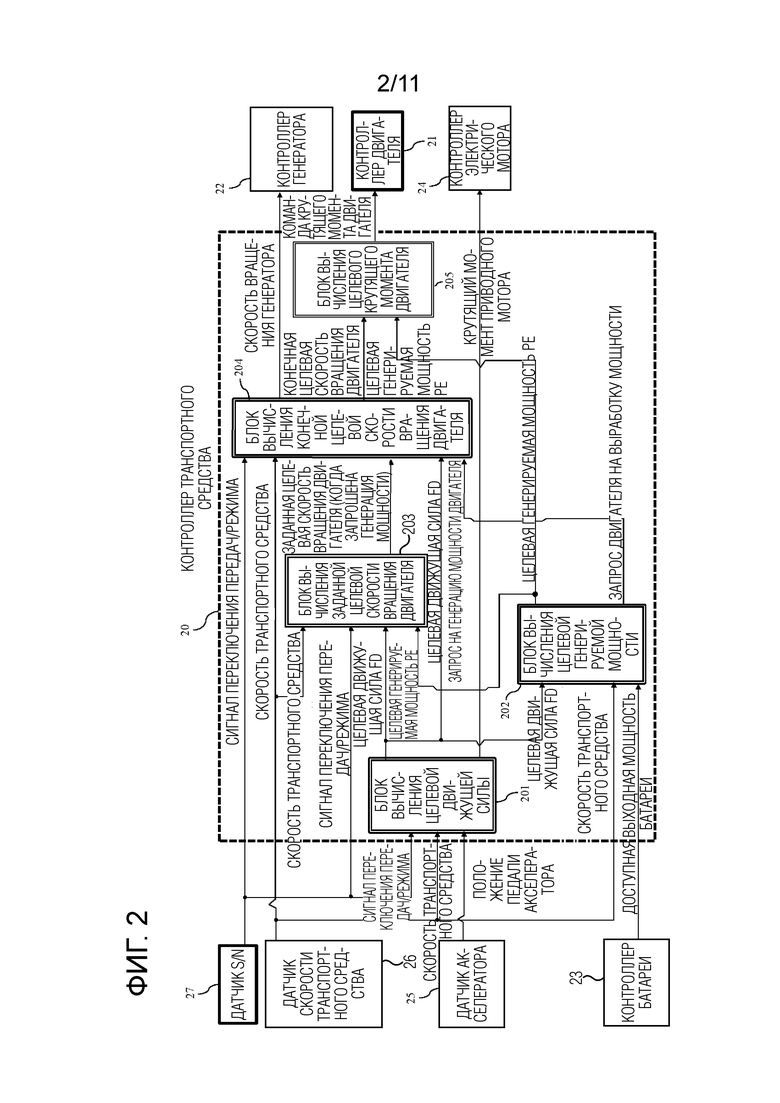
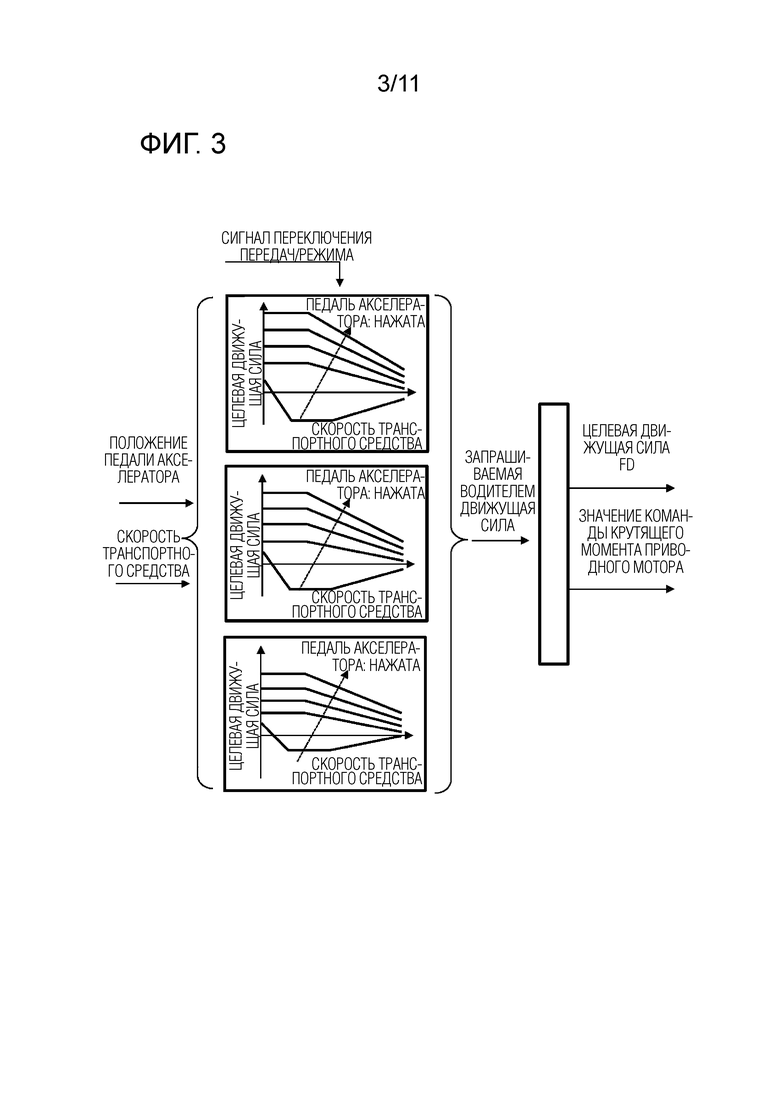
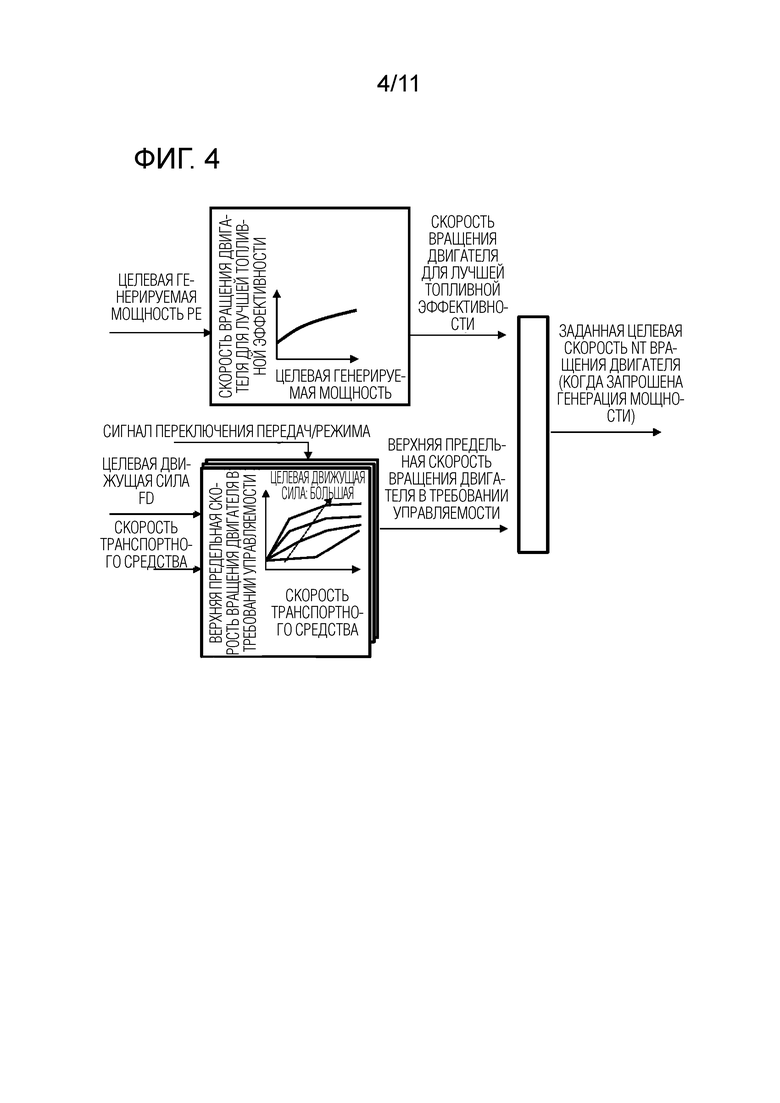
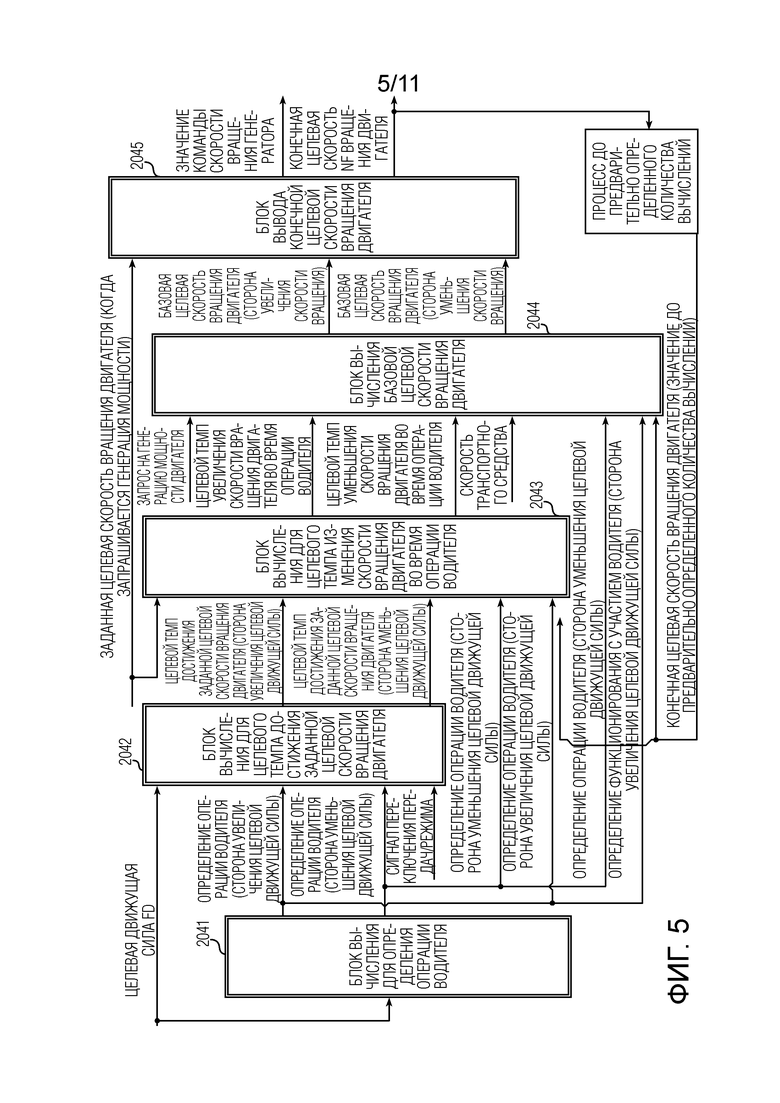
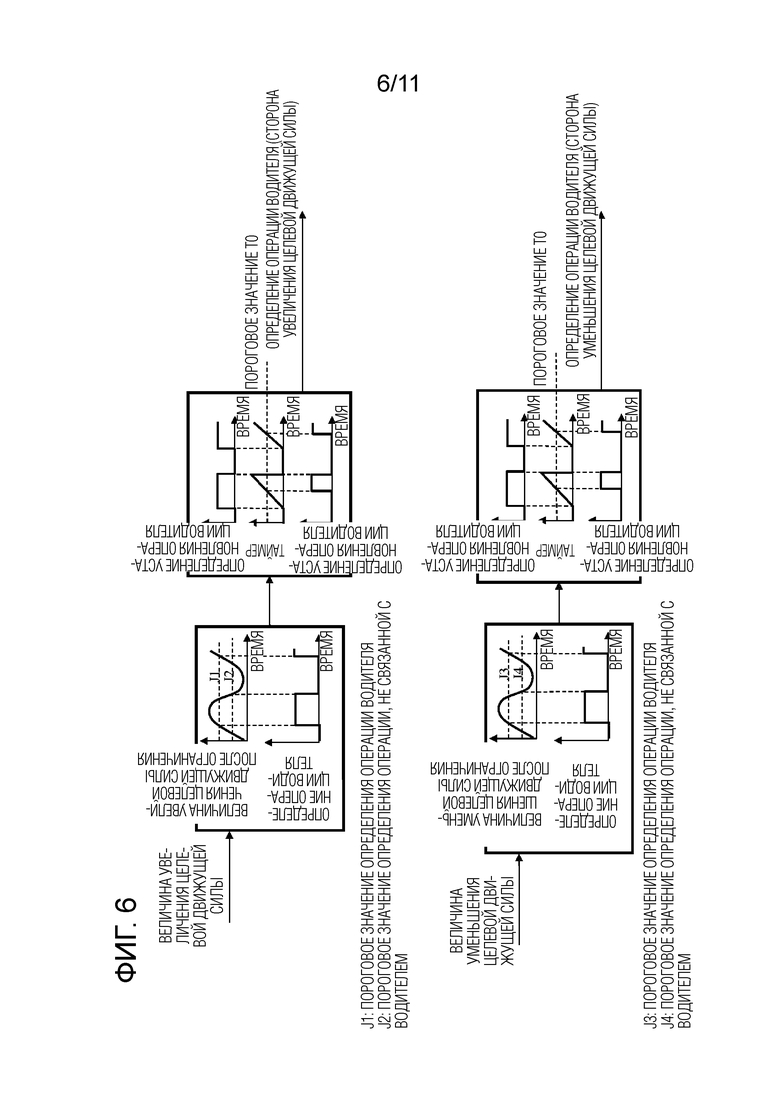
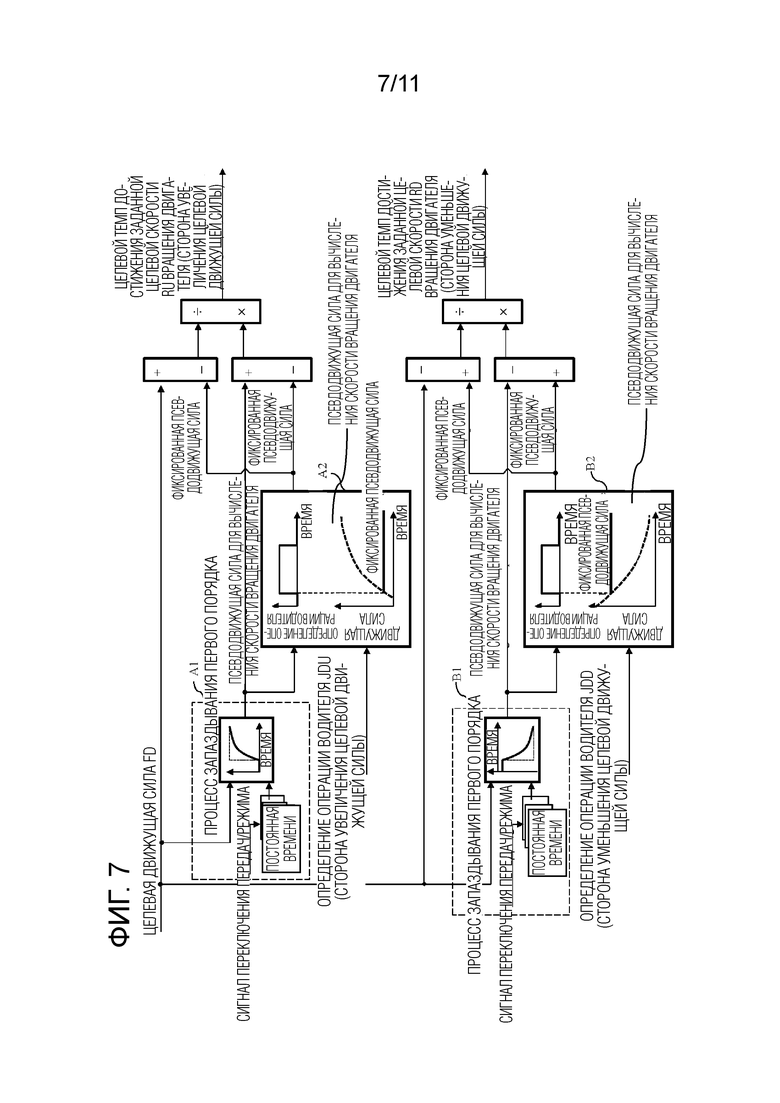
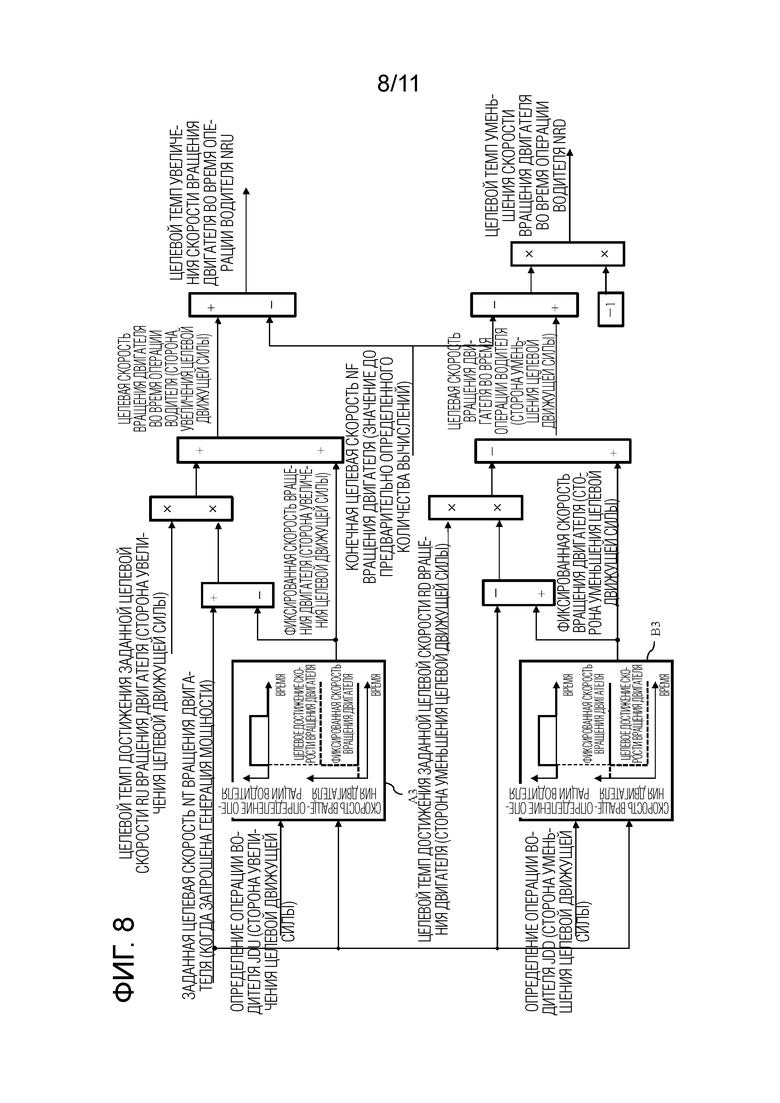
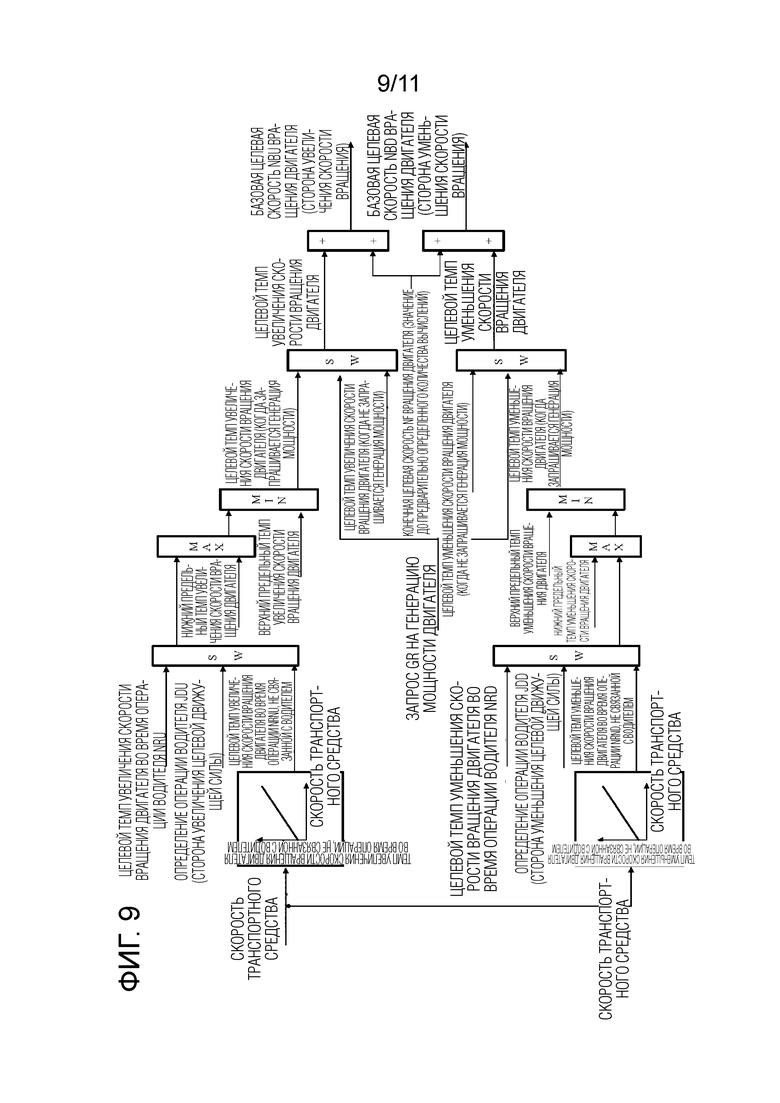
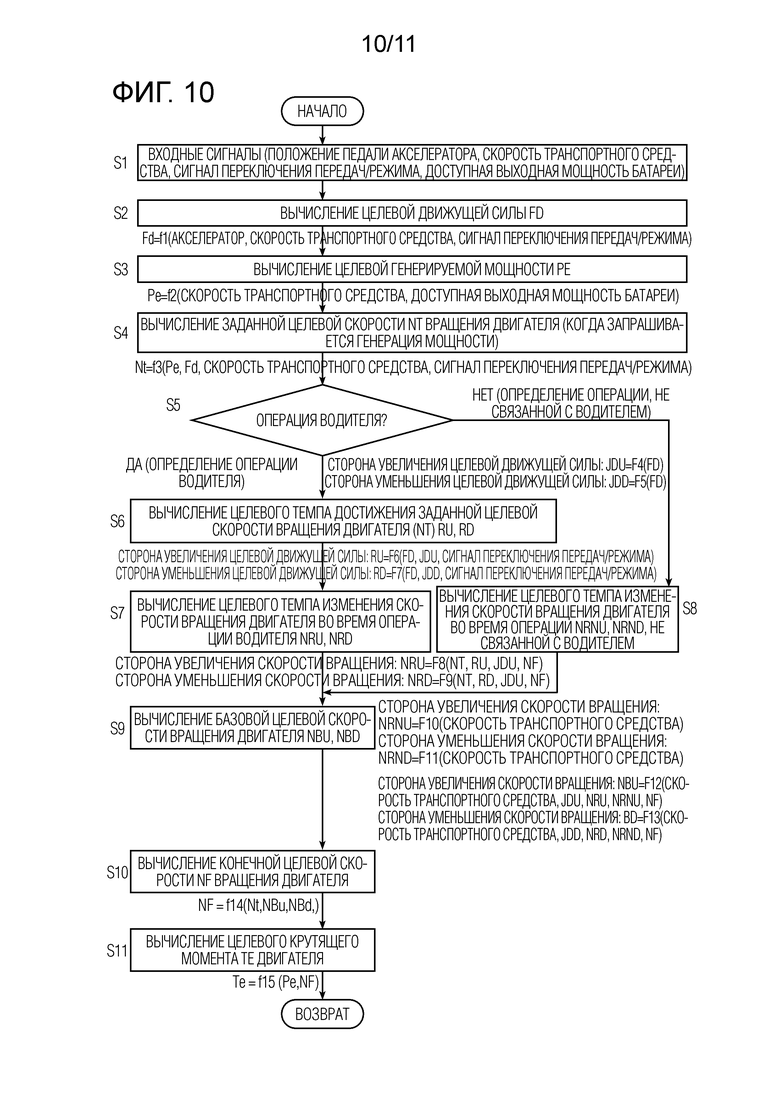
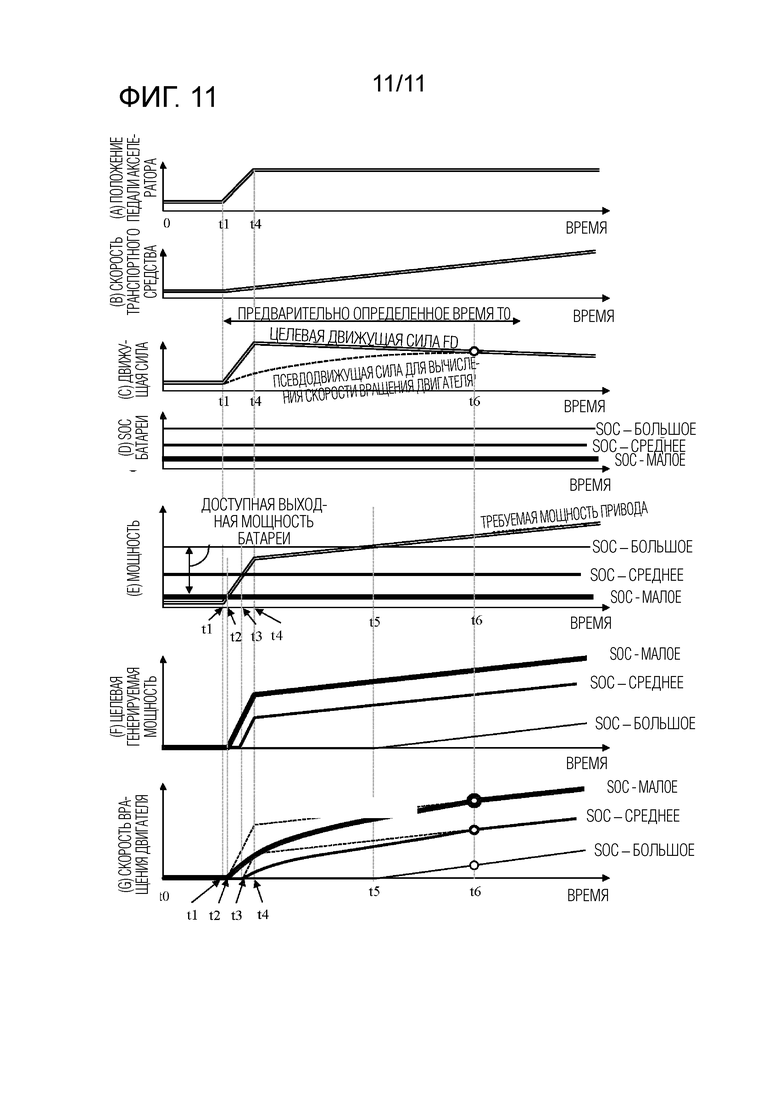
Изобретение относится к гибридному транспортному средству. В способе управления двигателем гибридного транспортного средства вычисляют целевую движущую силу для транспортного средства и управляют скоростью вращения двигателя в соответствии с псевдодвижущей силой и фиксированной псевдодвижущей силой. Причем псевдодвижущая сила постепенно приближается к целевой движущей силе до момента времени после первого предварительно определенного времени с задержкой по времени относительно целевой движущей силы. Фиксированная псевдодвижущая сила представляет собой псевдодвижущую силу в моменте времени, в котором величина или показатель изменения целевой движущей силы становится предварительно определенным пороговым значением или больше. Повышается комфорт при вождении. 4 н. и 8 з.п. ф-лы, 11 ил.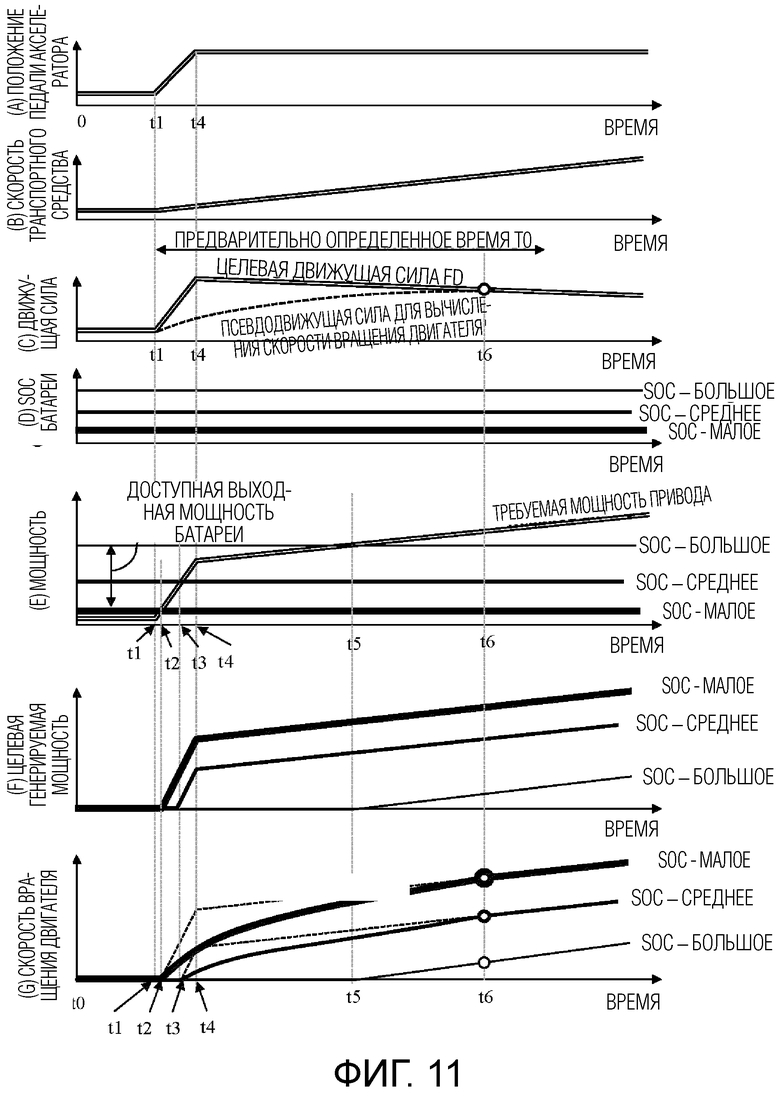
1. Способ управления двигателем гибридного транспортного средства, содержащего электрический мотор, который приводит в действие транспортное средство для движения, генератор, который подает мощность на электрический мотор, и двигатель, который приводит в действие генератор, причем способ содержит этапы, на которых:
вычисляют целевую движущую силу для транспортного средства; и
управляют скоростью вращения двигателя в соответствии с псевдодвижущей силой и фиксированной псевдодвижущей силой, причем псевдодвижущая сила постепенно приближается к целевой движущей силе до момента времени после первого предварительно определенного времени с задержкой по времени относительно целевой движущей силы, фиксированная псевдодвижущая сила представляет собой псевдодвижущую силу в моменте времени, в котором величина или показатель изменения целевой движущей силы становится предварительно определенным пороговым значением или больше.
2. Способ управления двигателем гибридного транспортного средства по п. 1, содержащий этапы, на которых:
вычисляют величину или показатель изменения целевой движущей силы для транспортного средства;
вычисляют псевдодвижущую силу, полученную посредством подвергания целевой движущей силы процессу запаздывания первого порядка;
устанавливают значение, коррелирующее с темпом достижения псевдодвижущей силы до целевой движущей силы, в качестве темпа изменения скорости вращения двигателя; и
управляют скоростью вращения двигателя на основании темпа изменения скорости вращения двигателя.
3. Способ управления двигателем гибридного транспортного средства, содержащего электрический мотор, который приводит в действие транспортное средство для движения, генератор, который подает мощность в электрический мотор, и двигатель, который приводит в действие генератор, причем способ содержит этапы, на которых:
вычисляют величину или показатель изменения целевой движущей силы для транспортного средства;
устанавливают темп изменения скорости вращения двигателя в соответствии с величиной или показателем изменения целевой движущей силы; и
управляют скоростью вращения двигателя на основании темпа изменения скорости вращения двигателя, причем
скорость вращения двигателя управляется на основании темпа изменения скорости вращения двигателя в соответствии с величиной или показателем изменения целевой движущей силы с момента времени, в котором величина или показатель изменения целевой движущей силы становится предварительно определенным пороговым значением или больше, до истечения второго предварительно определенного времени, и
после истечения второго предварительно определенного времени скорость вращения двигателя управляется на основании предварительно определенного постоянного темпа изменения скорости вращения двигателя.
4. Способ управления двигателем гибридного транспортного средства по п. 3, причем, когда темп изменения скорости вращения двигателя устанавливается в соответствии с величиной или показателем изменения целевой движущей силы, темп изменения скорости вращения двигателя устанавливается большим по мере увеличения величины или показателя изменения целевой движущей силы.
5. Способ управления двигателем гибридного транспортного средства по п. 3 или 4, причем, когда темп изменения скорости вращения двигателя устанавливается в соответствии с величиной или показателем изменения целевой движущей силы, темп изменения скорости вращения двигателя устанавливается в соответствии с псевдодвижущей силой, полученной посредством подвергания целевой движущей силы процессу запаздывания первого порядка.
6. Способ управления двигателем гибридного транспортного средства по п. 5, причем темп изменения скорости вращения двигателя устанавливается равным значению, коррелирующему с темпом достижения псевдодвижущей силы до целевой движущей силы.
7. Способ управления двигателем гибридного транспортного средства по любому из пп. 2-6, причем абсолютное значение темпа изменения скорости вращения двигателя ограничено, чтобы быть предварительно определенным темпом изменения или более.
8. Способ управления двигателем гибридного транспортного средства по любому из пп. 2, 5 и 6, причем
транспортное средство выполнено с возможностью установки множества спецификаций движения, в которых профили целевой движущей силы, которые установлены относительно скорости движения и положения педали акселератора, отличаются, и
постоянная времени процесса запаздывания первого порядка устанавливается меньшей по мере того как целевая движущая сила относительно скорости движения увеличивается в спецификациях движения.
9. Способ управления двигателем гибридного транспортного средства по любому из пп. 2, 5, 6 и 8, причем электрический мотор управляется на основании целевой движущей силы, которая не подвергнута обработке процесса запаздывания первого порядка.
10. Способ управления двигателем гибридного транспортного средства по любому из пп. 1-9, причем
транспортное средство дополнительно содержит батарею, которая подает мощность в электрический мотор, и
когда требуемая мощность, соответствующая целевой движущей силе, недостаточна с мощностью, подаваемой от батареи в электрический мотор, мощность, включающая в себя недостаточную мощность, подается из генератора в электрический мотор.
11. Устройство для управления двигателем гибридного транспортного средства, содержащего электрический мотор, который приводит в действие транспортное средство для движения, генератор, который подает мощность на электрический мотор, и двигатель, который приводит в действие генератор,
причем устройство функционирует с возможностью: вычислять целевую движущую силу для транспортного средства; и управлять скоростью вращения двигателя в соответствии с псевдодвижущей силой и фиксированной псевдодвижущей силой, причем псевдодвижущая сила постепенно приближается к целевой движущей силе до момента времени после первого предварительно определенного времени с задержкой по времени относительно целевой движущей силы, фиксированная псевдодвижущая сила представляет собой псевдодвижущую силу в моменте времени, в котором величина или показатель изменения целевой движущей силы становится предварительно определенным пороговым значением или больше.
12. Устройство для управления двигателем гибридного транспортного средства, содержащего электрический мотор, который приводит в действие транспортное средство для движения, генератор, который подает мощность в электрический мотор, и двигатель, который приводит в действие генератор,
причем устройство функционирует с возможностью: вычислять величину или показатель изменения целевой движущей силы для транспортного средства; устанавливать темп изменения скорости вращения двигателя в соответствии с величиной или показателем изменения целевой движущей силы; и управлять скоростью вращения двигателя на основании темпа изменения скорости вращения двигателя, причем
скорость вращения двигателя управляется на основании темпа изменения скорости вращения двигателя в соответствии с величиной или показателем изменения целевой движущей силы с момента времени, в котором величина или показатель изменения целевой движущей силы становится предварительно определенным пороговым значением или больше, до истечения второго предварительно определенного времени, и
после истечения второго предварительно определенного времени скорость вращения двигателя управляется на основании предварительно определенного постоянного темпа изменения скорости вращения двигателя.

