Область техники
Изобретение относится к области железнодорожного транспорта, а именно к системам управления тормоза железнодорожного транспортного средства, преимущественно грузового и предназначено для электрического и пневматического управления изменением давления сжатого воздуха в тормозных цилиндрах грузовых вагонов и диагностики работы тормозного оборудования.
Уровень техники
Известна система управления торможением железнодорожного транспортного средства (патент № RU 251298 C1, B60T 8/32, B60T 17/22, B60T 13/66, B60T 13/74, опубл. 20.05.2015), содержащая компоненты исполнительной части, подключенной к тормозной магистрали, тормозному цилиндру и запасному резервуару, блок управления и коммутационную часть. Электропневматическая часть включает подключенные к контроллеру электропневматический вентиль торможения, предназначенный для сообщения тормозной магистрали с атмосферой, электропневматический вентиль отпуска, предназначенный для соединения канала тормозной магистрали с рабочей камерой воздухораспределителя. Система содержит автономный источник электропитания, который через поездную управляющую линию соединен с указанным, по меньшей мере, одним исполнительным устройством.
Известна система управления торможением железнодорожного транспортного средства (патент № RU 2600470 C1, В60Т 15/18, В60Т 13/36, В60Т 13/68, опубл. 20.10.2016), которая содержит расположенные на каждой единице, входящей в состав транспортного средства, пневматическую часть, подключенную к тормозной магистрали, блок управления, подключенный к контроллеру, электропневматическую часть, включающую электропневматический вентиль торможения, предназначенный для сообщения тормозной магистрали с атмосферой, электропневматический вентиль отпуска, предназначенный для соединения канала тормозной магистрали с рабочей камерой воздухораспределителя, и датчик давления. Датчик давления подключен к тормозной магистрали и блоку управления, соединенному с установленным на локомотиве блоком управления, к которому подключен кран машиниста, соединенный с пневматической тормозной магистралью.
Данная система также предполагает оснащение локомотива блоком управления, подключенного к крану машиниста, и радиооборудованием, а всех вагонов - радиооборудованием и аккумуляторами, зарядка которых предполагается от осевых генераторов.
Наиболее близким аналогом заявляемому изобретению является система цифрового управления тормоза пассажирского железнодорожного транспортного средства (патент № RU 2633664 C1, B60T 13/68, B60T 15/36, В60T 17/18, опубл. 16.10.2017), содержащая электровоздухораспределитель, связанный с электрической линией электропневматического тормоза и пневматически соединенный с тормозной магистралью, запасным резервуаром, тормозными цилиндрами, и имеющий в составе блок управления, работающий под управлением программного обеспечения и связанный с устройствами контроля, выполненными в виде датчиков давления тормозной магистрали, запасного резервуара, каждого тормозного цилиндра и датчиками загрузки вагона. При этом блок управления связан с поездной электролинией управления электропневматического тормоза (ЭПТ) через цифровой модем и блок разделения цифровых и аналоговых сигналов, а с исполнительной частью - через блок реле, который соединен с электромагнитными вентилями электровоздухораспределителя, при этом блок разделения сигналов выходом связан с входами блока питания и блока реле, а выход блока питания связан с цифровым модемом и электронным блоком управления.
Недостатком упомянутой системы является неуправляемое состояние тормоза в режиме «Отпуск» поскольку в данном режиме система обесточена и не может функционировать и, как следствие, происходит неравномерный отпуск тормоза в пределах поезда, приводящий к возникновению в поезде продольнодинамических сил, воздействующих на автосцепные устройства. Диагностика тормоза в положении «Отпуск» также невозможна. Кроме того, система управления не может функционировать без специализированного оборудования, передающего цифровые команды, установленного в локомотиве. Точность и синхронность выполнения ступеней торможения обеспечивается исключительно благодаря цифровым командам, задающим требующую величину ступени торможения и отпуска. В случае наличия сильных электромагнитных помех в пути следования поезда существует вероятность неприема или приема не с первого раза цифровой команды, формируемой в локомотиве и передаваемой по поездной электролинии управления ЭПТ отдельным вагонным тормозным устройствами, что может приводить к несинхронному срабатыванию и отпуску тормозов в пределах поезда так же приводящему к возникновению продольнодинамических сил.
У электровоздухораспределителей, работающих без цифрового управления, исполнительными элементами в которых являются электромагнитные вентили, соединенные непосредственно с поездной электролинией управления ЭПТ, например, электровоздухораспределитель усл. № 305 величина давления в тормозном цилиндре зависит от длительности подачи управляющего напряжения на вход электровоздухораспределителя, диаметра отверстий, через которые происходит наполнение и опустошение тормозного цилиндра, точности изготовления пневматической части. Как следствие, возникает разница в величинах давлений в тормозных цилиндрах вагонов поезда и, соответственно, увеличиваются продольнодинамические силы в поезде, воздействующие на автосцепные устройства.
Раскрытие изобретения
При создании изобретения решалась задача создания интеллектуальной системы управления торможением железнодорожного транспортного средства, исключающей описанные недостатки известных аналогов, повышающего эффективность тормозных процессов железнодорожного подвижного состава.
Технический результат, который будет получен при осуществлении предлагаемого изобретения, заключается в повышении эффективности управления тормоза железнодорожного транспортного средства, в том числе и в режиме отпуска, с сохранением унификации элементов тормоза железнодорожного грузового вагона.
Повышение эффективности системы управления тормоза железнодорожного транспортного средства достигается за счет:
1. Сохранения активности системы в положении «Отпуск» и осуществления процесса управления отпуском тормоза. Тем самым в поезде снижаются продольнодинамические силы, вызываемые процессами отпуска тормозов.
2. Управления тормозом непосредственно электросигналами управления, формируемыми в поездной электролинии стандартным устройством управления ЭПТ таким, например, как СПН ЭПТ М. Благодаря чему нет необходимости устанавливать в локомотив дополнительное оборудование. Улучшается синхронность выполнения команд управления тормозом, благодаря крайне высокой помехоустойчивости электросигналов управления ЭПТ. В поезде снижаются продольнодинамические силы, вызываемые процессами торможения/отпуска.
3. Диагностики тормоза, в случае необходимости и наличия в локомотиве дополнительного оборудования, которая может осуществляться в любом режиме работы ЭПТ: «Торможение», «Перекрыша», «Отпуск».
4. Применения специализированных программных алгоритмов управления исполнительными устройствами, благодаря которым удается обеспечить точное задание величины давления в тормозных цилиндрах всех вагонов поезда без необходимости применения цифрового обмена данными локомотив-вагон.
Кроме того, представленное изобретение упрощает процесс формирования подвижного состава, поскольку вагоны, оснащенные предложенной системой управления торможением, могут формироваться с любыми локомотивами, оснащенными стандартными устройствами управления ЭПТ, не требуется оснащение локомотивов дополнительными адаптационными электронными устройствами для взаимодействия с системой управления торможением на отдельной единице подвижного состава.
Указанный технический результат достигается тем, что система управления и диагностики тормоза железнодорожного транспортного средства содержит блок управления, включающий программы, основанные на алгоритмах управления тормозным оборудованием, электрически связанный с поездной электролинией управления, в том числе посредством блока питания; с исполнительной частью посредством блока коммутации, пневматически связанной с запасным резервуаром, тормозной магистралью и с тормозным цилиндром; с устройствами контроля исполнительной части, при этом, согласно изобретению, блок питания связан с автономным источником электропитания и выполнен с возможностью обеспечения бесперебойным электропитанием своих потребителей во всех режимах работы тормоза и переключения потребителей между питанием от автономного источника электропитания и питанием от поездной электролинии управления.
При этом, согласно изобретению, блок питания выполнен с возможностью изменения режимов своей работы в зависимости от управляющих электросигналов от блока управления, в том числе отключения питания от всех или части своих потребителей.
При этом, согласно изобретению, блок питания выполнен с возможностью формирования различных уровней напряжения на своих выходах согласно требованиям подключаемых потребителей.
При этом, согласно изобретению, исполнительная часть содержит электромагнитные вентили или пневмораспределители с электроприводом, обеспечивающие установку необходимого давления в тормозном цилиндре по сигналу от блока управления.
При этом, согласно изобретению, устройства контроля исполнительной части выполнены в виде датчиков давления, электрически связанных с блоком управления.
При этом, согласно изобретению, блок управления выполнен с возможностью считывания сигналов напряжения, формируемых в поездной электролинии управления, определяя заданный режим работы, и формирования управляющих электросигналов, воздейсвующих на исполнительные устройства, длительность и период подачи которых обеспечивают поддержание необходимой величины давления в тормозном цилиндре или темп изменения величины давления в тормозном цилиндре в зависимости от режима работы.
При этом, согласно изобретению, блок управления содержит энергонезависимую память.
При этом, согласно изобретению, блок управления на основе заложенных в него программных алгоритмов выполнен с возможностью контроля и управления темпом изменения давления в тормозном цилиндре в течение всего времени присутствия в поездной электролинии управления управляющих электросигналов «Отпуск» и «Торможение».
При этом, согласно изобретению, блок управления на основе заложенных в него программных алгоритмов выполнен с возможностью контроля и поддержания давления в тормозном цилиндре в течение всего времени присутствия в поездной электролинии управления управляющего электросигнала «Перекрыша».
При этом, согласно изобретению, блок управления на основе заложенных в него программных алгоритмов выполнен с возможностью осуществления диагностики системы управления и тормозной системы вагона.
При этом, согласно изобретению, блок управления связан с поездной электролинией управления через PLC-модем с возможностью передачи настроек, команд управления, диагностики системы управления, считывания данных с датчиков, считывания данных регистрации и обеспечения двухстороннего обмена данными локомотив-вагон и/или вагон-вагон во всех режимах тормоза.
При этом, согласно изобретению, автономный источник электропитания выполнен на основе электрических аккумуляторов или ионисторов.
При этом, согласно изобретению, блок питания выполнен с возможностью зарядки автономного источника электропитания от поездной электролинии управления во всех режимах работы тормоза.
При этом, согласно изобретению, блок управления выполнен с возможностью определения количества энергии в единицу времени, отбираемой из поездной электролинии управления для заряда автономного источника путем подачи команд в блок питания в зависимости от заданного режима работы тормоза, измеренной величины напряжения поездной электролинии управления, фактического потребления энергии системой в данный момент времени, данных о состоянии источника электрической энергии, полученных от блока питания, обнаруженных ошибок в работе системы.
При этом, согласно изобретению, автономный источник электропитания выполнен на основе незаряжаемых химических источников электрического тока.
Электропневматические тормоза обладают рядом преимуществ по сравнению с пневматическими. Их применение позволяет повысить эффективность торможения поездов и заметно сократить длину тормозных путей, что достигается благодаря одновременности действия тормозов во всем поезде и уменьшению времени наполнения тормозных цилиндров воздухом. При этом резко снижаются продольно-динамические усилия, и достигается плавность торможения.
При управлении электропневматическими тормозами можно производить точные ступени торможения и быстрый ступенчатый отпуск, что позволяет гибко регулировать скорость движения поездов. Управление электропневматическими тормозами осуществляется при помощи электрического тока, а в качестве источника энергии для торможения используется давление сжатого воздуха на поршни тормозных цилиндров.
На пассажирских поездах с локомотивной тягой применяется двухпроводный электропневматический тормоз. Вдоль всего поезда проложены линейные провода тормоза: провод № 1 - рабочий (поездная электролиния управления), предназначенный для управления действием электровоздухораспределителей, и провод № 2 - контрольный, для сигнализации машинисту о состоянии цепи управления. В качестве обратного провода используются рельсы железнодорожного пути.
Устройство управления электропневматическим тормозом СПН ЭПТ М устанавливается в локомотиве и формирует напряжения специальной формы в поездной электролинии управления электропневматического тормоза (ЭПТ), предназначенные для управления исполнительными устройствами электропневматического тормоза.
Устройство управления электропневматическим тормозом рассчитано на работу с электровоздухораспределителями, исполнительными элементами в которых являются электромагнитные вентили, соединенные непосредственно с поездной электролинией управления ЭПТ, например, электровоздухораспределитель усл. № 305. В режимах «Торможение» и «Перекрыша» в поездную электролинию управления подается постоянное напряжение разной полярности плюс 50 В и минус 50 В соответственно, ограничение электрического тока потребления 15 А. Предполагается включение электромагнитных вентилей.
В известных устройствах в режиме «Отпуск» включение электромагнитных вентилей не предполагается. Устройством управления ЭПТ осуществляется только контроль целостности цепи. В поездную электролинию управления подается переменное напряжение 50 В, 625 Гц с ограничением электрического тока потребления 800 мА. Электромагнитные вентили в режиме «Отпуск» не включаются по причине высокой индуктивности собственных обмоток, препятствующей протеканию электрического тока через обмотки вентилей. Ограничение тока потребления в режиме «Отпуск», установленное равным 800 мА, накладывает жесткие ограничения на работу электронных устройств, подключаемых к поездной электролинии управления ЭПТ, особенно при работе в длинносоставных поездах. Питание мощных потребителей в режиме «Отпуск» от поездной электролинии управления ЭПТ, таких, например, как электромагнитные вентили или модемы для передачи данных является практически невозможным.
В предлагаемом решении добавив в систему управления тормозом, питаемой от поездной электролинии управления ЭПТ, автономный источник электропитания можно осуществлять питание мощных потребителей энергии в режиме «Отпуск». Автономный источник электропитания подключен к блоку питания, выполненному:
- с возможностью обеспечения бесперебойным электропитанием своих потребителей во всех режимах работы тормоза,
- с возможностью изменения режимов своей работы в зависимости от управляющих электросигналов от блока управления, в том числе отключения питания от всех или части своих потребителей и формирования различных уровней напряжения на своих выходах согласно требованиям подключаемых потребителей;
- с возможностью переключения всех или части своих потребителей между питанием от автономного источника электропитания и питанием от поездной электролинии управления.
Указанные усовершенствования позволяют осуществлять управление и диагностику тормоза железнодорожного транспортного средства во всех режимах его работы, что увеличивает эффективность тормозных процессов железнодорожного подвижного состава.
Краткое описание чертежей
Изобретение поясняется описанием конкретного примера ее выполнения и прилагаемыми графическими материалами, где на фиг. 1 представлена функциональная блок-схема системы управления тормоза железнодорожного транспортного средства.
Осуществление изобретения
Система управления тормоза железнодорожного транспортного средства одной подвижной единицы (вагона) содержит установленный на каждом вагоне и работающий под управлением программного обеспечения электронный блок управления 1, который включает программы, основанные на алгоритмах управления тормозным оборудованием, диагностики тормозного оборудования и самодиагностики (фиг. 1).
Блок управления 1 непосредственно связан с поездной электролинией управления 2 электропневматического тормоза (ЭПТ), проходящей по всей длине подвижного состава от локомотива. Блок управления 1 выполнен с возможностью считывания сигналов напряжения, формируемых в поездной электролинии управления 2 устройством управления ЭПТ, установленным в локомотиве (не показано), и, соответственно, определения заданного режима работы: «Отпуск», «Торможение» и «Перекрыша», а также определения ошибки, замыкания или обрыва поездной электролинии управления 2.
Блок управления 1 непосредственно связан с устройствами контроля исполнительной части 3. Блок управления 1 электрически связан с исполнительными устройствами исполнительной части 3 посредством блока коммутации 4. Блок коммутации выполнен с возможностью по команде блока управления 1 подачи электросигналов на исполнительные устройства исполнительной части 3. В качестве исполнительных устройств могут быть использованы, например, электромагнитные вентили или пневмораспределители с электроприводом, обеспечивающие установку необходимого давления в тормозном цилиндре по команде от блока управления 1. Устройства контроля могут быть выполнены в виде датчиков давления.
Блок управления 1 связан с поездной электролинией управления 2 через блок питания 5, содержащий в своем составе контроллер заряда (в случае применения автономного источника электропитания, способного накапливать энергию), разряда и мониторинга состояния автономного источника электропитания (не показаны). Блок питания 5 выполнен с возможностью формирования различных уровней напряжения на своих выходах, удовлетворяя требованиям подключаемых потребителей (блок управления, PLC-модем (PLC power line communication), блок коммутации). Блок питания 5 выполнен с возможностью изменения режимов своей работы в зависимости от управляющих электросигналов блока управления 1 таких, например, как переключение всех или части своих потребителей между питанием от автономного источника электропитания и питанием от поездной электролинии управления 2, отключения питания от всех или части своих потребителей, изменение тока заряда автономного источника электропитания (в случае применения автономного источника электропитания, способного накапливать энергию).
Заряд автономного источника электропитания 7, в случае применения автономного источника электропитания, способного накапливать энергию, осуществляется электрической энергией, отобранной из поездной электролинии управления 2. Заряд может осуществляется во всех режимах тормоза: Отпуск», «Торможение» и «Перекрыша». Количество отбираемой энергии в единицу времени определяет блок управления 1 путем подачи команд в блок питания 5 в зависимости от заданного режима работы тормоза: «Отпуск», «Торможение» и «Перекрыша», измеренной величины напряжения поездной электролинии управления 2, фактического потребления энергии системой в данный момент времени, данных о состоянии автономного источника электропитания 7, полученных от блока питания 5, обнаруженных ошибок в работе системы.
Блок управления 1 связан с поездной электролинией управления 2 через PLC-модем 6 с возможностью передачи настроек, команд управления, диагностики системы управления, считывания данных с датчиков, считывания данных регистрации и обеспечения двухстороннего обмена данными локомотив-вагон и/или вагон-вагон во всех режимах тормоза «Отпуск», «Торможение» и «Перекрыша». Питание PLC-модема обеспечивается посредством блока питания 5.
Блок питания 5 связан с автономным источником электропитания 7 выполненным с возможностью обеспечения бесперебойным электропитанием тормозного оборудования. Автономный источник электропитания 7 выполнен, например, на основе электрических аккумуляторов, ионисторов или не заряжаемых химических источников электрического тока.
Исполнительная часть 3 пневматически связана с запасным резервуаром 8, тормозной магистралью 9 и с тормозным цилиндром 10. Управление исполнительной частью 3 осуществляется блоком управления 1 по заложенным в него программным алгоритмам, в зависимости от сигналов напряжения, поступающим из локомотива, формируемых в поездной электролинии 2 устройством управления ЭПТ.
В представленном примере осуществления изобретения исполнительная часть 3 состоит из нормально закрытого электромагнитного вентиля торможения, нормально открытого электромагнитного вентиля отпуска, датчика давления в тормозном цилиндре. Датчики давления, могут быть установлены, например, в каналах тормозной магистрали, запасного резервуара, каждого тормозного цилиндра соответственно, также могут быть установлены дополнительные датчики, например датчик определения загрузки вагона. При этом блок управления 1 выполнен с возможностью контроля величины давления с помощью датчиков давления и подачи управляющих электросигналов на блок коммутации 4 для управления электромагнитными вентилями торможения и отпуска исполнительной части 3.
В представленном примере осуществления изобретения коммутационная часть выполнена с возможностью соединения исполнительных устройств с источником питания и реализована с помощью электромагнитных реле и/или полупроводниковых ключах.
Блок управления 1 может быть связан с дополнительными вагонными исполнительными устройствами 11 через блок коммутации 4, подающий по команде блока управления 1 питание на дополнительные исполнительные устройства 11, установленные на вагоне, например, электромагнитные вентили, устройства с электроприводом, элементы светосигнальной арматуры, а также сторонние интеллектуальные системы.
Блок управления 1 может быть связан с дополнительными вагонными датчиками 12 через блок коммутации 4, подающий по команде блока управления 1 питание на дополнительные датчики 12, установленные на вагоне, и цифровые или аналоговые линии связи для считывания показаний с датчиков 12. Могут быть использованы датчики, например, вибрации, температуры, давления, загрузки вагона, различные концевые выключатели.
В блоке управления 1 установлена энергонезависимая память для записи данных регистрации, настроек, программ.
Работа системы управления тормозным оборудованием осуществляется следующим образом. При подаче устройством управления ЭПТ (установлено на локомотиве) управляющего электросигнала «Торможение» по поездной электролинии управления 2 блок управления 1 подает в блок коммутации 4 команду на включение вентиля отпуска, разрывая тем самым связь тормозного цилиндра 10 с атмосферой, параллельно блок управления 1 подает в блок коммутации 4 команды на включение вентиля торможения. Все время, в течение которого в поездной электролинии управления 2 присутствует управляющий электросигнал «Торможение», блок управления 1 многократно производит вычисление требуемой величины давления в тормозном цилиндре 10, через заложенные в программном коде или заданные в настройках интервалы времени, исходя из заложенной в программном коде или заданной в настройках величины темпа (скорости изменения) роста давления в тормозном цилиндре 10. При этом так же многократно в течение времени присутствия в поездной электролинии управления 2 управляющего электросигнала «Торможение», через заложенные в программном коде или заданные в настройках интервалы времени, блоком управления 1 производится измерение величины давления в тормозном цилиндре 10 и расчет длительности включения и отключения вентиля торможения. При этом длительность подачи команд на включение и отключение вентиля торможения рассчитывается с учетом обратной связи по давлению в тормозном цилиндре 10, то есть с учетом разности рассчитанной величины давления в тормозном цилиндре 10 и фактическим измеренным значением величины давления в тормозном цилиндре 10. Тем самым, обеспечивается требуемый темп роста давления в тормозном цилиндре 10 и, соответственно, равномерность давления в тормозных цилиндрах во всем составе. Команда «Торможение» выполняется тормозными системами каждого вагона поезда синхронно, благодаря крайне высокой помехоустойчивости электросигналов управления ЭПТ.
При подаче устройством управления ЭПТ управляющего электросигнала «Отпуск» блок управления 1 подает в блок коммутации 4 команду на отключение вентиля торможения, параллельно блок управления 1 подает в блок коммутации 4 команды на отключение вентиля отпуска. Все время, в течение которого в поездной электролинии управления 2 присутствует управляющий электросигнал «Отпуск», блок управления 1 многократно производит вычисление требуемой величины давления в тормозном цилиндре 10, через заложенные в программном коде или заданные в настройках интервалы времени, исходя из заложенной в программном коде или заданной в настройках величины темпа (скорости изменения) снижения давления в тормозном цилиндре 10. При этом так же многократно в течение времени присутствия в поездной электролинии управления 2 управляющего электросигнала «Отпуск», через заложенные в программном коде или заданные в настройках интервалы времени, блоком управления 1 производится измерение величины давления в тормозном цилиндре 10 и расчет длительности включения и отключения вентиля отпуска. При этом длительность подачи команд на включение и отключение вентиля отпуска рассчитывается с учетом обратной связи по давлению в тормозном цилиндре 10, то есть с учетом разности рассчитанной величины давления в тормозном цилиндре 10 и фактическим измеренным значением величины давления в тормозном цилиндре 10. Тем самым обеспечивается требуемый темп снижения давления в тормозном цилиндре 10 и, соответственно, равномерность давления в тормозных цилиндрах во всем составе. Таким образом, осуществляется контролируемый отпуск, при котором управляющие электросигналы, поступающие от блока управления 1 прерывистые или непрерывные обеспечивают требуемый темп отпуска. При этом питание исполнительных элементов исполнительной части и, в случае необходимости, остальных элементов тормозной системы обеспечивается за счет энергии от автономного источника электропитания 7. Команда «Отпуск» выполняется тормозными системами каждого вагона поезда синхронно, благодаря крайне высокой помехоустойчивости электросигналов управления ЭПТ.
При подаче устройством управления ЭПТ управляющего электросигнала «Перекрыша» по поездной электролинии управления 2 блок управления 1 фиксирует расчетное значение величины давления в тормозном цилиндре 10 и подает в блок коммутации 4 команды на включение вентиля отпуска и отключения вентиля торможения. В течение времени присутствия в поездной электролинии управления 2 управляющего электросигнала «Перекрыша», через заложенные в программном коде или заданные в настройках интервалы времени, блоком управления 1 производится измерение величины давления в тормозном цилиндре 10. В случае отклонения фактического измеренного значения величины давления в тормозном цилиндре 10 от расчетной величины давления в тормозном цилиндре 10, зафиксированной в момент подачи устройством управления ЭПТ электросигнала «Перекрыша», блок управления 1 подает в блок коммутации 4 команды на включение вентиля торможения или отключения вентиля отпуска для увеличения или, соответственно, снижения давления в тормозном цилиндре 10. Длительность подачи команд на включение или отключение вентилей торможения и отпуска рассчитывается с учетом обратной связи по давлению в тормозном цилиндре 10, то есть с учетом разности расчетной величины давления в тормозном цилиндре 10 и фактическим измеренным значением величины давления в тормозном цилиндре 10, тем самым обеспечивается поддержание давления в тормозном цилиндре 10 и, соответственно, равномерность давления в тормозных цилиндрах во всем составе. Команда «Перекрыша» также выполняется тормозными системами каждого вагона поезда синхронно, благодаря крайне высокой помехоустойчивости электросигналов управления ЭПТ.
Таким образом, благодаря использованию предлагаемого изобретения осуществляется непрерывный процесс управления торможением, что позволяет обеспечить надежность управления тормозными процессами за счет улучшения качества процессов торможения путем повышения точности и синхронности срабатывания и отпуска всех исполнительных тормозных устройств поезда без применения дополнительного оборудования, установленного на локомотиве, оперативности диагностики состояния тормозов, за счет активного состояния системы управления во всех режимах работы тормоза.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЛОК АДАПТИВНОГО УПРАВЛЕНИЯ ТОРМОЗОМ ТЕЛЕЖКИ | 2012 |
|
RU2524751C1 |
| СПОСОБ ДЕЙСТВИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКОГО ТОРМОЗА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2392141C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ ТОРМОЗ С ЦИФРОВЫМ УПРАВЛЕНИЕМ | 2016 |
|
RU2633664C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ ТОРМОЗ ЖЕЛЕЗНОДОРОЖНЫХ ПОДВИЖНЫХ ЕДИНИЦ | 2002 |
|
RU2243913C2 |
| Кран машиниста локомотива | 1982 |
|
SU1081035A1 |
| СПОСОБ ЭЛЕКТРОПНЕВМАТИЧЕСКОГО УПРАВЛЕНИЯ ВОЗДУХОРАСПРЕДЕЛИТЕЛЕМ ГРУЗОВОГО ВАГОНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2015 |
|
RU2608191C2 |
| СИСТЕМА УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2600470C1 |
| СПОСОБ ТОРМОЖЕНИЯ ЛОКОМОТИВА И КРАН ВСПОМОГАТЕЛЬНОГО ТОРМОЗА ЛОКОМОТИВА | 2010 |
|
RU2444453C1 |
| Система тормозного оборудования для железнодорожного транспортного средства | 2021 |
|
RU2763060C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ ТОРМОЗОМ | 2010 |
|
RU2428333C1 |

Изобретение относится к области железнодорожного транспорта и предназначено для электрического и пневматического управления изменением давления сжатого воздуха в тормозных цилиндрах грузовых вагонов и диагностики работы тормозного оборудования. Система управления тормоза железнодорожного транспортного средства содержит блок управления, включающий программы, основанные на алгоритмах управления тормозным оборудованием, электрически связанный с поездной электролинией управления, в том числе посредством блока питания; с исполнительной частью посредством блока коммутации, пневматически связанной с запасным резервуаром, тормозной магистралью и с тормозным цилиндром; с устройствами контроля исполнительной части. При этом блок питания связан с автономным источником электропитания и выполнен с возможностью обеспечения бесперебойным электропитанием своих потребителей во всех режимах работы тормоза и переключения потребителей между питанием от автономного источника электропитания и питанием от поездной электролинии управления. Технический результат - повышение эффективности управления тормоза железнодорожного транспортного средства. 14 з.п. ф-лы, 1 ил.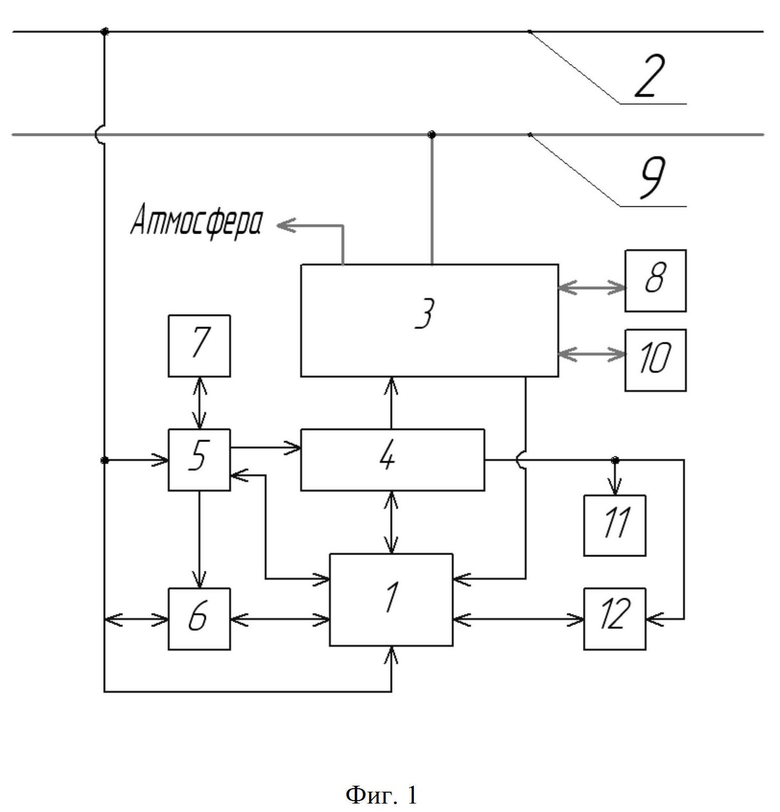
1. Система управления тормоза железнодорожного транспортного средства содержит блок управления, включающий программы, основанные на алгоритмах управления тормозным оборудованием, электрически связанный с поездной электролинией управления, в том числе посредством блока питания; с исполнительной частью посредством блока коммутации, пневматически связанной с запасным резервуаром, тормозной магистралью и с тормозным цилиндром; с устройствами контроля исполнительной части, отличающаяся тем, что блок питания связан с автономным источником электропитания и выполнен с возможностью обеспечения бесперебойным электропитанием своих потребителей во всех режимах работы тормоза и переключения потребителей между питанием от автономного источника электропитания и питанием от поездной электролинии управления.
2. Система управления по п. 1, отличающаяся тем, что блок питания выполнен с возможностью изменения режимов своей работы в зависимости от управляющих электросигналов от блока управления, в том числе отключения питания от всех или части своих потребителей.
3. Система управления по п. 1, отличающаяся тем, что блок питания выполнен с возможностью формирования различных уровней напряжения на своих выходах согласно требованиям подключаемых потребителей.
4. Система управления по п. 1, отличающаяся тем, что исполнительная часть содержит электромагнитные вентили или пневмораспределители с электроприводом, обеспечивающие установку необходимого давления в тормозном цилиндре по сигналу от блока управления.
5. Система управления по п. 1, отличающаяся тем, что устройства контроля исполнительной части выполнены в виде датчиков давления, электрически связанных с блоком управления.
6. Система управления по п. 1, отличающаяся тем, что блок управления выполнен с возможностью считывания сигналов напряжения, формируемых в поездной электролинии управления, определяя заданный режим работы, и формирования управляющих электросигналов, воздействующих на исполнительные устройства, длительность и период подачи которых обеспечивают поддержание необходимой величины давления в тормозном цилиндре или темп изменения величины давления в тормозном цилиндре в зависимости от режима работы.
7. Система управления и диагностики по п. 1, отличающаяся тем, что блок управления содержит энергонезависимую память.
8. Система управления по п. 1, отличающаяся тем, что блок управления на основе заложенных в него программных алгоритмов выполнен с возможностью контроля и управления темпом изменения давления в тормозном цилиндре в течение всего времени присутствия в поездной электролинии управления управляющих электросигналов «Отпуск» и «Торможение».
9. Система управления по п. 1, отличающаяся тем, что блок управления на основе заложенных в него программных алгоритмов выполнен с возможностью контроля и поддержания давления в тормозном цилиндре в течение всего времени присутствия в поездной электролинии управления управляющего электросигнала «Перекрыша».
10. Система управления по п. 1, отличающаяся тем, что блок управления на основе заложенных в него программных алгоритмов выполнен с возможностью осуществления диагностики системы управления и тормозной системы вагона.
11. Система управления по п. 1 или 10, отличающаяся тем, что блок управления связан с поездной электролинией управления через PLC-модем с возможностью передачи настроек, команд управления, диагностики системы управления, считывания данных с датчиков, считывания данных регистрации и обеспечения двухстороннего обмена данными локомотив-вагон и/или вагон-вагон во всех режимах тормоза.
12. Система управления по п. 1, отличающаяся тем, что автономный источник электропитания выполнен на основе электрических аккумуляторов или ионисторов.
13. Система управления по п. 12, отличающаяся тем, что блок питания выполнен с возможностью зарядки автономного источника электропитания от поездной электролинии управления во всех режимах работы тормоза.
14. Система управления по п. 13, отличающаяся тем, что блок управления выполнен с возможностью определения количества энергии в единицу времени, отбираемой из поездной электролинии управления для заряда автономного источника путем подачи команд в блок питания в зависимости от заданного режима работы тормоза, измеренной величины напряжения поездной электролинии управления, фактического потребления энергии системой в данный момент времени, данных о состоянии источника электрической энергии, полученных от блока питания, обнаруженных ошибок в работе системы.
15. Система управления по п. 1, отличающаяся тем, что автономный источник электропитания выполнен на основе незаряжаемых химических источников электрического тока.
| 0 |
|
SU174641A1 | |
| RU 110040 U1, 10.11.2011 | |||
| Устройство для управления электропневматическим тормозом железнодорожного транспортного средства | 1976 |
|
SU652002A1 |

