Область техники
Изобретение относится к машиностроению и может быть использовано в устройствах, где требуется преобразование вращательного движения в возвратно-поступательное и наоборот, совместно с получением неравномерного вращательного движения.
Уровень техники
Известен планетарный механизм для преобразования движения: Патент RU 2471099 - Устройство преобразования вращательного движения в возвратно-поступательное и наоборот. Недостаток известного механизма заключается в том, что увеличение амплитуды продольного возвратно-поступательного движения невозможно без одновременного увеличения поперечного размера механизма, так как и то, и другое определяется радиусом внешней шестерни.
Известен также принятый в качестве прототипа планетарный механизм для преобразования движения:
Патент RU 2416747 - Планетарный механизм для преобразования движения. Недостаток указанного механизма заключается в том, что его работа основана на периодическом поочередном вхождении и выхождении в/из зацепления сателлитов с зубчатыми венцами и зубчатыми рейками траверсы, совершающей возвратно-поступательное движение, что уменьшает надежность.
Задача
Задачей изобретения является разработка устройства более простой и надежной конструкции с возможностью увеличения амплитуды и равномерности возвратно-поступательного движения совместно с получением неравномерного вращательного движения.
Данная задача решается посредством:
- применения в конструкции механизма некруглой шестерни (6), включающей чередующиеся секторы различной кривизны, одни из которых являются более закругленными (7), другие менее закругленными (8), находящейся в непрерывном зацеплении с сателлитом (5);
- возможностью изменения длин более прямолинейных участков независимо от размеров более криволинейных участков;
- изменением соотношения радиусов кривизны некруглой шестерни, радиусов сателлита (5) и центральной шестерни (3), а также применением сдвоенных сателлитов.
Технический результат
Технический результат изобретения заключается в возможности получения различных законов возвратно-поступательного и вращательного движения, например, увеличения амплитуды возвратно-поступательного движения, достижения более постоянной скорости возвратно-поступательного движения в одном направлении в сочетании с более быстрой сменой направлений движения, а также в повышении надежности устройства благодаря непрерывности зубчатого зацепления.
Краткое описание чертежей
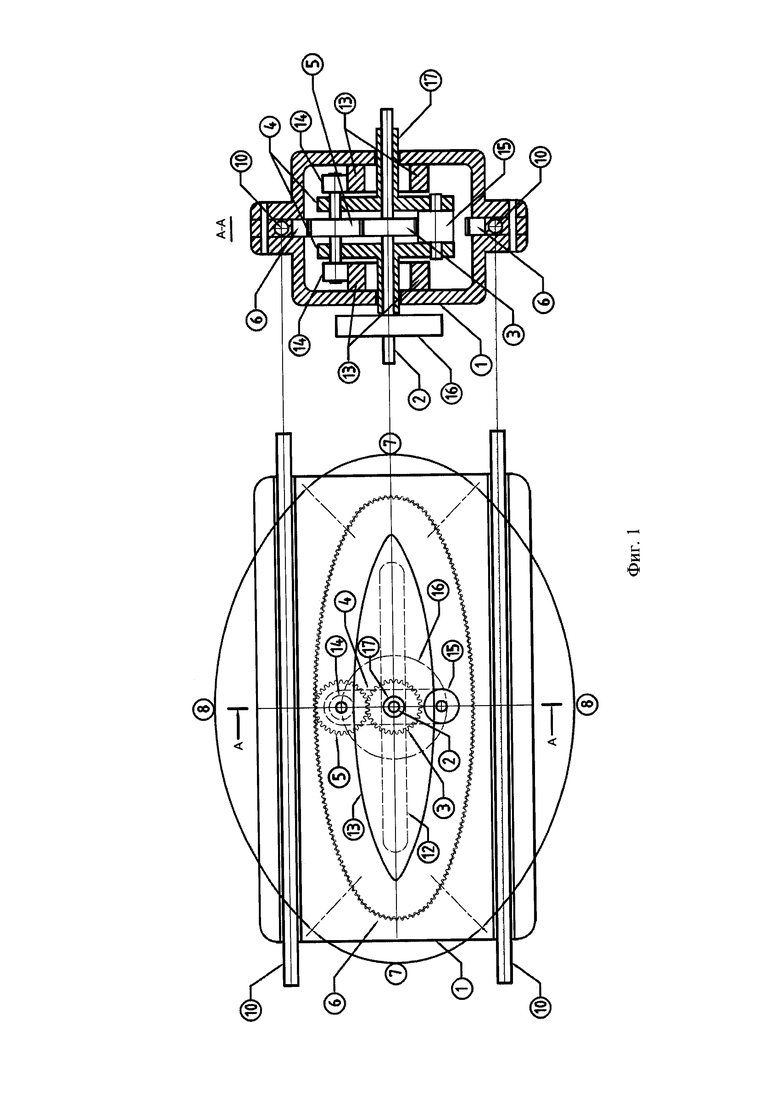
Фиг. 1 - Общий вид механизма для преобразования движения.
Фиг. 2 - Последовательное положение звеньев механизма в рабочем цикле.
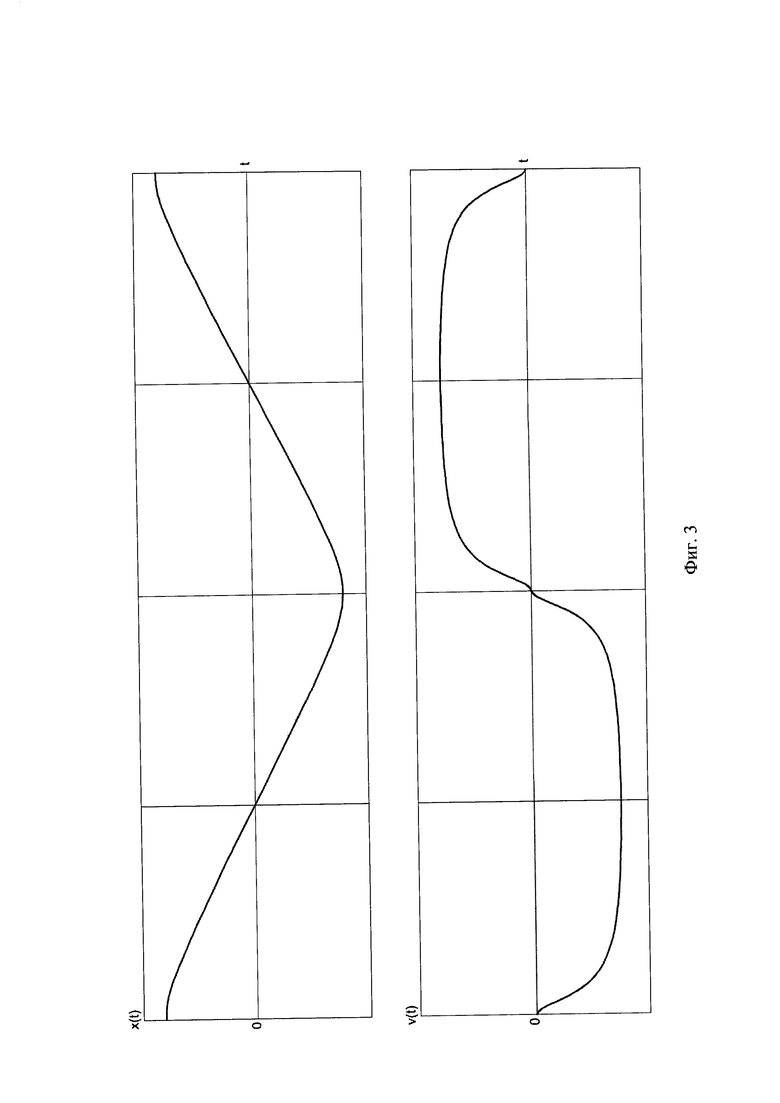
Фиг. 3 - Графики положения и скорости за один цикл возвратно-поступательного движения корпуса по направляющим для механизма с шестерней (6) в форме эллипса с эксцентриситетом 0.93 и одинаковыми диаметрами центральной шестерни (3) и сателлита (5).
Сущность изобретения
Изобретение относится к машиностроению и может быть использовано для преобразования движения в устройствах для преобразования вращательного движения в возвратно-поступательное и наоборот.
Планетарный механизм для преобразования движения содержит (Фиг. 1) корпус (1), входной вал (2) с центральной шестерней (3), водило (4), установленное с возможностью вращения вокруг входного вала (2), сателлит (5), расположенный на водиле (4), контактирующий как с центральной шестерней (3), так и с неподвижно закрепленной в корпусе (1) некруглой шестерней (6).
Указанная шестерня (6) состоит из секторов различной кривизны, одни из которых являются более закругленными (7), например, выполненными как полуокружности, другие являются менее закругленными, например, почти или полностью прямолинейными (8), причем секторы разной кривизны чередуются. Шестерня (6) может быть и другой формы, например, эллиптической.
Корпус (1) установлен на основании (условно не показано) с возможностью прямолинейного перемещения по направляющим (10), тогда как входной вал (2) установлен с возможностью вращения в опорах (11), неподвижно закрепленных на основании.
В боковых поверхностях корпуса (1) выполнены вырезы (12), обеспечивающие при движении корпуса по направляющим (10) входному валу (2) возможность относительного перемещения.
В корпусе (1) установлен направляющий рельс (13), расположенный концентрично некруглой шестерне (6), по которому обкатывается опора качения (14), установленная на водиле (4).
Указанный направляющий рельс (13) совместно с опорой качения (14) предотвращает потерю контакта и обеспечивает точность зацепления зубьев сателлита (5) с некруглой шестерней (6).
На водиле (4) центрально-симметрично сателлиту (5) установлен балансир (15), уравновешивающий массу сателлита (5) и опоры качения (14).
На входном валу (2) может быть установлен маховик (16), сглаживающий неравномерность вращения при преобразовании вращательного движения в возвратно-поступательное и обеспечивающий прохождение мертвых точек при обратном преобразовании.
С водилом (4) может быть соединен выходной вал (17), совершающий неравномерное вращение, более быстрое и на большую часть окружности, в то время как сателлит (5) проходит скругленные секторы некруглой шестерни (6), и медленное и на меньшую часть окружности, в то время как сателлит (5) проходит прямолинейные участки.
Таким образом, совместно с преобразованием вращательного движения в возвратно-поступательное и наоборот, обеспечивается возможность преобразования вращательного или возвратно-поступательного движения в неравномерное вращательное движение.
Указанный сателлит (5), как вариант, может быть сдвоенным, состоящим из двух вращающихся совместно шестерен различных радиусов, причем одна из шестерен контактирует с некруглой шестерней (6), в то время как другая с центральной шестерней (3). В случае сдвоенного сателлита (5) некруглая шестерня (6) может быть с внутренним, либо внешним зацеплением.
Гашение инерции поступательного движения корпуса (1) на максимальном выбеге обеспечивается, если необходимо, амортизирующими упорами (условно не показаны), установленными на основании.
Механизм для преобразования движения работает следующим образом (Фиг. 1, 2).
В режиме преобразования вращательного движения в возвратно-поступательное, когда ведущим звеном в механизме является входной вал (2), центральная шестерня (3) приводит во вращение сателлит (5), расположенный на водиле (4), контактирующий с установленной в корпусе некруглой шестерней (6). В результате вращения сателлит (5) обкатывается по шестерне (6), поочередно проходя ее секторы с различной кривизной, более закругленные (7) (положения 20, 26 на Фиг. 2) и более прямолинейные (8) (положения 21-25 и 27-31 на Фиг. 2). Во то время, как сателлит (5) проходит один из секторов (7) (положение 20 на Фиг. 2), водило (4) соединенное с выходным валом (17) совершает поворот на почти половину окружности, тогда как корпус (1) остается почти неподвижен относительно направляющих (10) и входного вала (2).
В момент перехода сателлита (5) на один из более прямолинейных секторов (8) вращение водила (4) и выходного вала (17) почти останавливается, а корпус (1) начинает поступательное движение по направляющим (10) (положение 21 на Фиг. 2), продолжающееся до перехода сателлита (5) на другой сектор (7) (положение 25 на Фиг. 2). Далее корпус (1) опять почти останавливается, поворот водила (4) повторяется до перехода сателлита (5) на другой сектор (8) (положения 26, 27 на Фиг. 2), что приводит к началу движения корпуса (1) по направляющим (10) в противоположную сторону (до положения 31 на Фиг. 2). Далее цикл работы механизма повторяется (с положения 20 на Фиг. 2).
В режиме обратного преобразования, усилие, приложенное к корпусу (1) вдоль направляющих (10), при нахождении сателлита (5) на одном из прямолинейных секторов (8)) (положения 21-25 на Фиг. 2), приводит к обкатыванию сателлита (5) по шестерне (6) и его вращение передается центральной шестерне (3) и входному валу (2). При переходе сателлита (5) на более закругленный сектор (7) (положение 26 на Фиг. 2) начинается вращение водила (4), а вместе с ним выходного вала (17). Движение корпуса при достижении максимального выбега останавливается, но так как вращение входного вала (2) и центральной шестерни (3) продолжается по инерции, запасенной маховиком (16), сателлит (5) продолжает вращаться, чтобы закончить обкатывание закругленного сектора (7), в конце которого движение водила постепенно останавливается, а движение сателлита с приходом усилия противоположного направления продолжается по следующему из прямолинейных секторов (8) (положения 27-31 на Фиг. 2). Далее цикл работы механизма повторяется (с положения 20 на Фиг. 2).

Изобретение относится к машиностроению. Планетарный механизм с некруглой шестерней для преобразования движения содержит корпус, входной вал с центральной шестерней, водило, установленное с возможностью вращения вокруг входного вала, сателлит, расположенный на водиле, контактирующий как с центральной шестерней, так и с неподвижно закрепленной в корпусе некруглой шестерней, состоящей из секторов различной кривизны, корпус которого установлен на основании с возможностью прямолинейного перемещения по направляющим. Входной вал установлен с возможностью вращения в опорах, неподвижно закрепленных на основании, и имеет установленный на нем направляющий рельс, расположенный концентрично некруглой шестерне, по которому обкатывается опора качения, установленная на водиле, предотвращающая потерю контакта и обеспечивающая точность зацепления сателлита с некруглой шестерней, при том что на водиле центрально-симметрично сателлиту установлен балансир, уравновешивающий массу сателлита и опоры качения. Обеспечивается повышение надежности механизма. 5 з.п. ф-лы, 3 ил.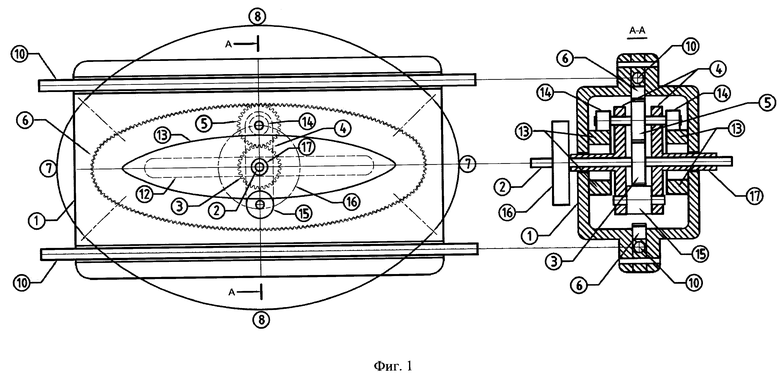
1. Планетарный механизм с некруглой шестерней для преобразования движения, содержащий корпус, входной вал с центральной шестерней, водило, установленное с возможностью вращения вокруг входного вала, сателлит, расположенный на водиле, контактирующий как с центральной шестерней, так и с неподвижно закрепленной в корпусе некруглой шестерней, состоящей из секторов различной кривизны, корпус которого установлен на основании с возможностью прямолинейного перемещения по направляющим, тогда как входной вал установлен с возможностью вращения в опорах, неподвижно закрепленных на основании, и имеет установленный на нем направляющий рельс, расположенный концентрично некруглой шестерне, по которому обкатывается опора качения, установленная на водиле, предотвращающая потерю контакта и обеспечивающая точность зацепления сателлита с некруглой шестерней, при том что на водиле центрально-симметрично сателлиту установлен балансир, уравновешивающий массу сателлита и опоры качения.
2. Планетарный механизм с некруглой шестерней для преобразования движения по п. 1, отличающийся тем, что для преобразования вращательного движения входного вала или возвратно-поступательного движения корпуса в неравномерное вращательное движение с водилом соединен выходной вал, совершающий неравномерное вращение, более быстрое и на большую часть окружности, в то время как сателлит проходит скругленные секторы некруглой шестерни, и медленное и на меньшую часть окружности, в то время как сателлит проходит более прямолинейные секторы.
3. Планетарный механизм с некруглой шестерней для преобразования движения по п. 1, отличающийся тем, что сателлит является сдвоенным, состоящим из двух вращающихся совместно шестерен различных радиусов, причем одна из шестерен контактирует с некруглой шестерней, в то время как другая с центральной шестерней, причем некруглая шестерня может быть с внутренним либо внешним зацеплением.
4. Планетарный механизм с некруглой шестерней для преобразования движения по п. 1, отличающийся тем, что содержит маховик, установленный на входном валу, для более равномерного поступательного движения корпуса при преобразовании вращательного движения в возвратно-поступательное, а также для обеспечения прохождения мертвых точек по инерции при обратном преобразовании движения.
5. Планетарный механизм с некруглой шестерней для преобразования движения по п. 1, отличающийся тем, что гашение инерции поступательного движения корпуса на максимальном выбеге обеспечивается амортизирующими упорами, установленными на основании.
6. Планетарный механизм с некруглой шестерней для преобразования движения по п. 1, отличающийся тем, что пара механизмов по п. 1 установлена на один входной вал таким образом, что движутся в противофазе для взаимного уравновешивания сил и моментов инерции.
| ПЛАНЕТАРНЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 2007 |
|
RU2416747C2 |
| US 8734288 B2, 27.05.2014 | |||
| US 8409051 B2, 02.04.2013 | |||
| JP 2011214594 A, 27.10.2011. | |||

