Изобретение относится к машиностроению, а именно к рычажно-зубчатым преобразователям движения, и может найти применение в различных устройствах, где требуется преобразование вращательного движения в колебательное с перемещающейся траекторией и во вращательно-возвратно-поступательное.
Известен механизм преобразования вращательного движения в возвратно-поступательное по перемещающейся траектории, содержащий кривошип с шестерней, установленный в шкиве привода его вращения, коромысло, шатун, один конец которого шарнирно связан с коромыслом, а другой - с кривошипом, и установленное на корпусе механизма и взаимодействующее с шестерней зубчатое колесо (авт. св. N 1027455, кл. F 16 H 21/16, 1982).
Недостатками известного механизма являются недостаточные кинематические возможности (в частности, не позволяет получить на выходе вращательное движение с редуцированием скорости), а также затруднительность передачи больших вращающих моментов из-за применения для этой цели клиноременной передачи.
Известно устройство для преобразования вращательного движения в сложное, состоящее из вращательного и возвратно-поступательного движений, содержащее корпус с направляющей в виде цилиндра, размещенный в нем с возможностью вращательного и возвратно-поступательного движения ползун, соосный цилиндру ведущий вал, кривошипно-шатунный механизм, шатун которого выполнен в виде вилки и жестко связан с ползуном, и взаимодействующую с кривошипно-шатунным механизмом коническую планетарную передачу, включающую жестко связанное с ведущим валом водило, в котором размещен кривошипный вал, концентрично вяжущему валу и жестко связанное с корпусом центральное колесо и размещенный с возможностью вращения на одном конце кривошипного вала сателлит, на другом конце кривошипного вала размещен второй сателлит, а на сателлитах жестко закреплены кривошипные пальцы, связанные каждый с соответствующим концом вилки через шарниры с перпендикулярными осями, ведущий вал выполнен пустотелым и на нем с возможностью вращательного и возвратно-поступательного движения размещен дополнительный ползун, жестко с закрепленный на вилке соосно и противоположно основному (авт. свид. СССР N 1182220, кл. F 16 H 37/12, 1984).
Наиболее близким по технической сущности и достигаемому результату к изобретению является рычажно-зубчатый механизм для преобразования вращательного движения в сложное, содержащий корпус и планетарную коническую зубчатую передачу, включающую закрепленное на корпусе центральное колесо, полое водило, установленное в корпусе с возможностью вращения, по крайней мере один сателлит, расположенный на водиле с возможностью вращения и входящий в зацепление с центральным колесом, кривошип, жестко связанный с сателлитом, выходной ползун, установленный в полости водила, и основной шатун, шарнирно связанный одним концом с кривошипом, а другим - выходным - с ползуном, в корпусе выполнена кольцевая проточка, соосная оси вращения водила, а механизм снабжен коромыслом, вал которого перпендикулярен оси вращения водила и установлен в кольцевой проточке с возможностью кругового вращения, дополнительным шатуном, шарнирно связанным одним концом с кривошипом, а другим - с коромыслом, ведомым валом, установленным в корпусе соосно водилу, и конической зубчатой передачей, ведущее колесо которой связано с валом коромысла, ведомое колесо закреплено на ведомом валу, при этом ведущее колесо конической зубчатой передачи связано с валом коромысла через муфту свободного хода [1] .
Однако известный механизм обладает недостаточными кинематическими возможностями, так как не позволяет осуществлять селективное управление выходным звеном. Кроме того, кинематическая схема механизма относительно сложна.
Цель изобретения - расширение кинематических возможностей и упрощение кинематической схемы механизма.
Это достигается тем, что в рычажно-зубчатом механизме для преобразования вращательного движения в сложное, содержащем корпус и планетарную коническую зубчатую передачу, включающую закрепленное на корпусе центральное колесо, полое водило, установленное в корпусе с возможностью вращения, по крайней мере один сателлит, установленный на водиле с возможностью вращения и входящий в зацепление с центральным колесом, кривошип, жестко связанный с сателлитом, выходной ползун, установленный в полости водила, основной шатун, шарнирно связанный одним концом с кривошипом, а другим - с выходным ползуном, коромысло, ось вращения которого перпендикулярна оси вращения водила, дополнительный шатун, шарнирно связанный одним концом с кривошипом, а другим - с коромыслом, ведомый вал, установленный в корпусе соосно с водилом, коническую зубчатую передачу, ведомое колесо которой закреплено на ведомом валу, и муфту свободного хода, установленную в ведущем элементе конической зубчатой передачи, шатун кривошипа выполнен из трех частей - двух вилок и соединяющего из ползуна, первая вилка, шарнирно соединенная с кривошипом, имеет на внутренней поверхности продольные пазы, в которых размещен один конец ползуна, другой конец этого ползуна шарнирно соединен со второй вилкой, с возможностью вращения установленный на выходном ползуне, ползун шатуна и выходной ползун могут быть жестко соединены с вилками шатуна кривошипа, например, с помощью штифтов, ведущий элемент конической зубчатой передачи выполнен в виде зубчатого сектора и через муфту свободного хода установлен на ступице коромысла, а последнее, в свою очередь, с возможностью вращения установлено на валу кривошипа.
На чертеже показана конструктивная схема механизма.
Рычажно-зубчатый механизм для преобразования вращательного движения в сложное содержит корпус 1 и планетарную коническую зубчатую передачу, включающую закрепленное на корпусе центральное колесо 2, полое водило 3, установленное в корпусе 1 с возможностью вращения, и по меньшей мере один сателлит 4, расположенный на полом водиле 3 с возможностью вращения и входящий в зацепление с центральным колесом 2.
С сателлитом 4 жестко связан кривошип 5, а в полости 6 водила 3 установлен выходной ползун 7, через основной шатун 8 шарнирно связанный с кривошипом 5. Выходной ползун 7 является первым выходным звеном. Коромысло 9 с возможностью вращения установлено на валу кривошипа 5 и через дополнительный шатун 10 шарнирно связано с кривошипом 5. На ступице коромысла 9 установлен ведущий зубчатый сектор 11 конической передачи, который может быть связан с коромыслом 9 либо жестко (не показано), либо через муфту 12 свободного хода.
Ведомое колесо 13 этой передачи закреплено на ведомом валу 14, являющемся вторым выходным звеном механизма. На валу 14 установлен рабочий орган в виде, например, планшайбы 15. На ведущем валу 16, жестко связанном с полым водилом 3, закреплено приводное зубчатое колесо 17, связанное с приводом (не показан).
Основной шатун 8 кривошипа 5 состоит из трех частей - двух вилок 18 и 19 и соединяющего их ползуна 20. Вилка 18 шарнирно соединена с кривошипом 5, а вилка 19 также шарнирно с ползуном 20. На внутренней поверхности вилки 18 выполнены продольные пазы 21, в которых размещен ползун 20. Вилка 19 с возможностью вращения установлена на выходном ползуне 7. В этом случае связь между вилкой 19 и выходным ползуном 7 осуществляется через радиально-упорный подшипник. Вилка 18 и ползун 20 могут быть жестко соединены между собой с помощью, например, штифта 22, а вилка 19 также жестко может быть соединена с выходным ползуном 7 с помощью штифта 23. Для удобства эксплуатации в стенках центрального колеса 2 выполнены окна 24.
Механизм работает следующим образом.
В исходном положении вилка 18 и ползун 20, а также вилка 19 и выходной ползун 7 жестко соединены между собой штифтами 22 и 23 соответственно, так что основной шатун 8 представляет собой единое целое. Вращение вокруг оси Х-Х от привода через колесо 17 передается полому водилу 3, от него через кривошип 5 и основной шатун 8 - выходному ползуну 7, а через дополнительный шатун 10 - коромыслу 9. Связанный с коромыслом 9 ведущий сектор 11 через ведомое колесо 13 сообщает вращение ведомому валу 14 с закрепленной на нем планшайбой 15.
Одновременно сателлит 4, обкатываясь при вращении водила 3 по центральному колесу 2, сообщает вращение вокруг оси Х-Х кривошипу 5, который через основной шатун 8 сообщает выходному ползуну 7 возвратно-поступательное движение в полости 6 водила 3, а через дополнительный шатун 10 - колебательное движение коромыслу 9 и жестко связанному с ним ведущему коническому сектору 11, который через колесо 13 передает эти колебания ведомому валу 14.
Таким образом, равномерное вращение водила 3 преобразуется в сложное движение выходного ползуна 7, состоящее из вращательного и возвратно-поступательного движений, и в сложное движение ведомого вала 14, состоящего из вращательного и колебательного, причем амплитуда колебательного движения перемещается по окружности вращения вала.
Если ведущий конический сектор 11 связан с коромыслом 9 не непосредственно, а через муфту 12 свободного хода, то колебательное движение коромысла 9 будет превращаться в прерывистое однонаправленное вращение конического сектора 11, и в соответствии с этим вал 14 будет совершать неравномерное или прерывистое (в зависимости от направления прерывистого вращения сектора 11) однонаправленное вращение, причем фаза остановки или ускорения вала 14 будет смещаться по окружности его вращения.
Для перехода выходного ползуна 7 от сложного движения к простому непрерывно вращательному (или, иначе, исключая из сложного движения возвратно-поступательное) при помощи стопора 22 расстопоривают основной шатун 8, после чего последний начинает работать в режиме кулисного соединения, и выходной ползун 7 получает только вращательное движение. В результате первое выходное звено будет работать как редуктор.
Для перехода выходного ползуна 7 от сложного движения к простому возвратно-поступательному с помощью штифта 23 расстопоривают выходной ползун 7 (ползун 20 застопорен шифтом 22), в результате чего выходной ползун получает только возвратно-поступательное движение.
Если необходимо, чтобы выходной ползун был полностью выключен от работы при работающем втором выходном звене - ведомом вале 14 с помощью штифтов 22 и 23 расстопоривают ползун 20 и выходной ползун 7. В результате последний не будет получать ни возвратно-поступательного, ни вращательного движений и поэтому останется неподвижным.
Предложенный механизм позволяет селективно управлять работой одного из выходных звеньев, а именно осуществлять по необходимости переход от сложного движения, состоящего из возвратно-поступательного и вращательного движений, к простым движениям - возвратно-поступательному или вращательному, и наоборот, а также останавливать работу этого выходного звена при работающем втором выходном звене. Это расширяет кинематические возможности механизма.
Кроме того, в предложенном механизме кривошип и коромысло размещены на одном валу, что позволяет исключить из схемы вал коромысла и концентричный паз на внутренней поверхности корпуса, где располагается этот вал, и таким образом упростить кинематическую схему механизма.
Использование: рычажно-зубчатые преобразователи вращательного движения ведущего звена в колебательное с перемещающейся траекторией и во вращательно-возвратно-поступательное. Сущность: при жестко соединенных один с другим вилки 18 и ползуна 20, а также вилки 19 и выходного ползуна 7 вращение вокруг оси Y - Y от привода передается через основной шатун 8 выходному ползуну 7, а через дополнительный шатун 10 - коромыслу 9 и далее - ведомому валу 14 с планшайбой 15. Одновременно кривошип 5 вместе с сателлитом 4 вращается вокруг оси X -X и через основной шатун 8 сообщает выходному ползуну 7 возвратно-поступательное движение, а через дополнительный шатун 10 и коромысло 9 - колебательное движение ведомому валу 14. При расстопоренном ползуне 20 выходной ползун 7 будет совершать только вращательное движение, при расстопоренном выходном ползуне 7 последний будет совершать только возвратно-поступательное движение. При одновременном расстопорении ползуна 20 и выходного ползуна 7 последний будет неподвижен и будет работать только второе выходное звено - ведомый вал 14. Манипулируя штифтами 22 и 23 можно получить сочетание работы двух выходных звеньев в виде либо двух сложных вдижений, либо в одном звене сложного движения, а в другом вращательного или возвратно-поступательного. 1 з. п. ф-лы, 1 ил.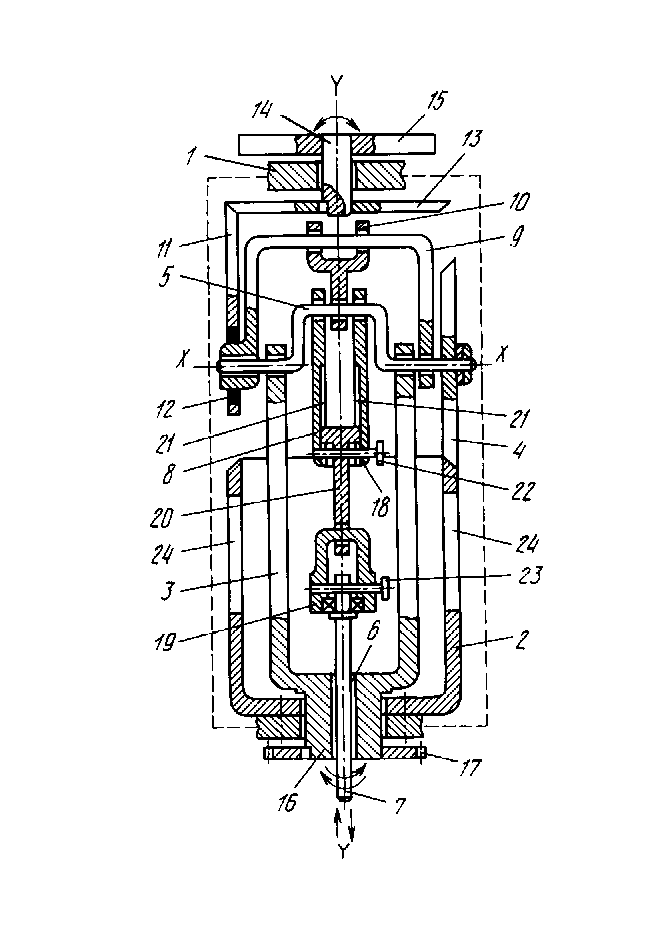
РЫЧАЖНО-ЗУБЧАТЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В СЛОЖНОЕ, содержащий смонтированную в корпусе планетарную зубчатую передачу в виде закрепленного на корпусе центрального колеса, установленного в корпусе с возможностью вращения полого водила, установленного на последнем с возможностью вращения и входящего в зацепление с центральным колесом по меньшей мере одного сателлита, жестко соединенного с сателлитом кривошипа, установленного в полости водила выходного ползуна, основного шатуна, шарнирно связанного одним концом с кривошипом, а другим - с выходным ползуном, коромысла с осью вращения, перпендикулярной оси вращения водила, дополнительного шатуна, шарнирно связанного одним концом с кривошипом, а другим с коромыслом, установленного в корпусе соосно с водилом ведомого вала, конической зубчатой передачи с закрепленным на ведомом валу ведомым колесом и ведущим элементом и установленной в последнем муфты свободного хода, отличающийся тем, что, с целью расширения кинематических возможностей, основной шатун выполнен в виде двух вилок, ползуна и штифтов, одна из вилок выполнена с продольными пазами на ее внутренней поверхности и шарнирно соединена с кривошипом, вторая вилка установлена на выходном ползуне с возможностью вращения, ползун шатуна одним концом размещен в продольных пазах первой вилки, другим концом шарнирно соединен с второй вилкой, при этом выходной ползун и ползун шатуна установлены с возможностью жесткого соединения с вилками шатуна кривошипа посредством штифтов.
