Изобретение относится к области машиностроения, а именно к устройствам преобразования движения.
Наиболее близким техническим решением, выбранным в качестве прототипа, является отдельный стеклоочиститель ветрового стекла автомобиля, патент США 4630327, МПК B 60 S 1/36, публикация 23.12.86 г., содержащий ползун, связанный со щеткой и изменяющийся в длину во время движения щетки, т.е. возвратно-поступательно перемещающийся относительно направляющей подвижного корпуса, содержащего устройство для управления возвратно-поступательным перемещением ползуна, которое состоит из первого внутреннего зубчатого венца, прикрепленного к корпусу, первой зубчатой шестерни, зацепляющейся с первым внутренним зубчатым венцом для втягивания и вытягивания (возвратно-поступательного движения) ползуна, где первая зубчатая шестерня через шип, расположенный на ее делительной окружности, подвижно связана с ползуном и выполнена с диаметром делительной окружности, равным половине диаметра делительной окружности первого внутреннего зубчатого венца. Первая зубчатая шестерня вращается на первом вале водила, жестко связанным с последним (с водилом), второй вал которого проходит через отверстие стенки подвижного корпуса с соосным расположением с первым зубчатым венцом. Второй вал водила является ведущим валом устройства для управления возвратно-поступательным перемещением ползуна и жестко связан с второй зубчатой шестерней второго устройства для управления поворотным перемещением подвижного (поворачивающегося) корпуса. Вторая зубчатая шестерня второго устройства для управления поворотным перемещением подвижного корпуса (и конечно привода, размещенного в этом подвижном корпусе устройства для возвратно-поступательного перемещения ползуна) имеет зубчатое зацепление с вторым внутренним зубчатым венцом, прикрепленным к второму неподвижному корпусу, через отверстие в котором проходит основной ведущий вал привода подвижного корпуса, жестко соединенный с последним.
При рассмотрении динамики устройства для управления возвратно-поступательным перемещением ползуна видно, что в результате вращения второго вала водила (за счет обкатывания второй зубчатой шестерни второго внутреннего зубчатого венца неподвижного корпуса второго устройства при повороте подвижного корпуса относительно неподвижного) первая зубчатая шестерня обкатывает первый внутренний зубчатый венец и благодаря половинному соотношению их диаметров делительных окружностей - шип первой зубчатой шестерни (расположенный на ее делительной окружности и подвижно соединенный с ползуном), вращаясь относительно своей продольной оси симметрии (оси вращения), совершает возвратно-поступательные перемещения по диаметрально расположенной относительно первой зубчатой шестерни линии, тем самым перемещая возвратно-поступательно ползун со щеткой.
Недостатками данного технического решения механизма стеклоочистителя ветрового стекла, а именно его устройства преобразования движения (устройства для управления возвратно-поступательным перемещением ползуна), являются: невозможность воспринимать осевые нагрузки, так как в нем вторая ось водила, на которой жестко закреплена вторая зубчатая шестерня (второго устройства), опирается только на одну стенку подвижного корпуса, а первая ось водила, на которой вращается первая зубчатая шестерня, и шип ползуна имеют одностороннее закрепление; низкий коэффициент полезного действия из-за больших потерь на трение скольжения между взаимодействующими составляющими; невозможность изменения направления вектора возвратно-поступательного перемещения шипа (т.е. элемента, совершающего возвратно-поступательные перемещения) вследствие жесткой привязки его к одному (определенному) месту первой зубчатой шестерни на ее делительном диаметре; большой внутренний дисбаланс конструкции из-за неуравновешенности несимметрично расположенных в ней ее составляющих; невозможность получать возвратно-поступательное или иное движение ведомого элемента (в данной конструкции - ползуна) без направляющих.
Задача изобретения: увеличение надежности и долговечности устройства преобразования движения, снижение его внутреннего дисбаланса до минимального значения, повышение его КПД и расширение его функциональных возможностей - преобразование вращательного движения водил в иное ведомого звена (жесткого соединительного звена) без направляющих, в том числе в возвратно-поступательное, и наоборот, за счет применения двух планетарных механизмов и конструктивной возможности изменения векторов перемещений их кривошипов.
Решение поставленной задачи достигается тем, что в устройстве преобразования движения, включающем планетарный механизм, содержащий корпус с центральным зубчатым колесом, имеющим внутреннее зубчатое зацепление с сателлитом, диаметр делительной окружности которого равен половине диаметра делительной окружности центрального зубчатого колеса, вал сателлита, установленный во взаимодействующем с корпусом водиле, ось вращения которого совпадает с продольной осью симметрии центрального зубчатого колеса, кривошип, связанный с сателлитом с параллельным расположением их осей вращения, согласно изобретению оно (устройство) дополнительно включает второй аналогичный планетарный механизм, в каждом из которых водило образовано двумя частями, расположенными напротив торцевых плоскостей центрального зубчатого колеса и взаимодействующими с корпусом через основные подшипниковые узлы качения, соосные с центральным зубчатым колесом, сателлит же жестко соединен со своим валом, установленным в обеих частях водила через дополнительные подшипниковые узлы качения, а кривошип закреплен с возможностью изменения межосевого расстояния между ним и валом сателлита на установочном элементе регулировочного устройства, которое своим опорным элементом закреплено на одном из концов вала сателлита, обе же части водила жестко связаны между собой по меньшей мере через один компенсатор, расположенный между ними и обеспечивающий необходимые рабочие зазоры в основных подшипниковых узлах и балансировку масс механизма, причем корпуса планетарных механизмов неподвижно взаимосвязаны друг с другом с параллельным расположением продольных осей симметрии их центральных зубчатых колес, водилы же планетарных механизмов взаимосвязаны между собой кинематической связью с передаточным числом, равным единице, а кривошипы планетарных механизмов кинематически взаимосвязаны между собой через жесткое соединительное звено.
В частном случае выполнения в каждом из обоих планетарных механизмов устройства преобразования движения части водила выполнены дискообразной формы с плоскими поверхностями, расположенными с зазорами напротив торцов центрального зубчатого колеса.
В частном случае выполнения в каждом из обоих планетарных механизмов устройства преобразования движения центральное зубчатое колесо выполнено за одно целое в виде единой детали с корпусом.
В частном случае выполнения в каждом из обоих планетарных механизмов устройства преобразования движения сателлит выполнен за одно целое в виде единой детали со своим валом.
В частном случае выполнения в каждом из обоих планетарных механизмов устройства преобразования движения на частях водила выполнены дорожки качения основных и дополнительных подшипниковых узлов качения.
В частном случае выполнения в каждом из обоих планетарных механизмов устройства преобразования движения на свободном конце вала сателлита установлена опорная втулка с дорожкой качения одного из дополнительных подшипниковых узлов качения.
В частном случае выполнения в каждом из обоих планетарных механизмов устройства преобразования движения на опорном элементе регулировочного устройства выполнена дорожка качения одного из дополнительных подшипниковых узлов качения.
В частном случае выполнения в каждом из обоих планетарных механизмов устройства преобразования движения на корпусе выполнены дорожки качения основных подшипниковых узлов качения.
В частном случае выполнения в каждом из обоих планетарных механизмов устройства преобразования движения диаметры выполненных на частях водила и корпуса дорожек качения основных подшипниковых узлов качения больше диаметра делительной окружности центрального зубчатого колеса.
В частном случае выполнения в каждом из обоих планетарных механизмов устройства преобразования движения основные и дополнительные подшипниковые узлы качения выполнены в виде радиально-упорных шариковых подшипников.
В частном случае выполнения кинематическая связь между водилами планетарных механизмов выполнена в виде жестко установленных на водилах и взаимодействующих между собой зубчатых шестерен с одинаковыми диаметрами делительных окружностей.
В частном случае выполнения кинематическая связь между водилами планетарных механизмов выполнена в виде жестко установленных на водилах и взаимодействующих между собой через паразитную шестерню зубчатых шестерен с одинаковыми диаметрами их делительных окружностей.
В частном случае выполнения в каждом из обоих планетарных механизмов устройства преобразования движения в установочном и опорном элементах регулировочного устройства выполнены соответствующие по форме и размерам взаимодействующие между собой выступ и паз соответственно, которые расположены поперечно к валу сателлита, причем установочный элемент регулировочного устройства зафиксирован относительно его опорного элемента посредством фиксирующего болта.
В частном случае выполнения в каждом из обоих планетарных механизмов устройства преобразования движения имеется один компенсатор, выполненный в виде массивной детали, занимающей свободное пространство между частями водила, которые жестко связаны между собой посредством по меньшей мере одного стяжного болта, проходящего сквозь компенсатор.
В частном случае выполнения корпуса планетарных механизмов устройства преобразования движения неподвижно взаимосвязаны между собой посредством общего корпуса, в котором они установлены.
В частном случае выполнения соединительное звено устройства преобразования движения соединено с кривошипами его планетарных механизмов через подшипниковые узлы.
Сравнение заявляемого технического решения с уровнем техники по научно-технической и патентной документации на дату приоритета показывает, что совокупность существенных признаков заявляемого решения ранее не была известна, следовательно, оно соответствует условию патентоспособности "новизна".
Анализ известных технических решений в данной области техники показал, что предлагаемое решение имеет признаки, отсутствующие в известных решениях, а их использование в заявляемой совокупности признаков дает возможность получить новый технический эффект, следовательно, предложенное техническое решение имеет изобретательский уровень по сравнению с существующим уровнем техники.
Предложенное техническое решение промышленно применимо, так как может быть изготовлено промышленным способом, работоспособно, осуществимо и воспроизводимо, следовательно, соответствует условию патентоспособности "промышленная применимость".
Сущность изобретения поясняется на чертежах:
фиг.1 изображает устройство преобразования движения, продольный разрез;
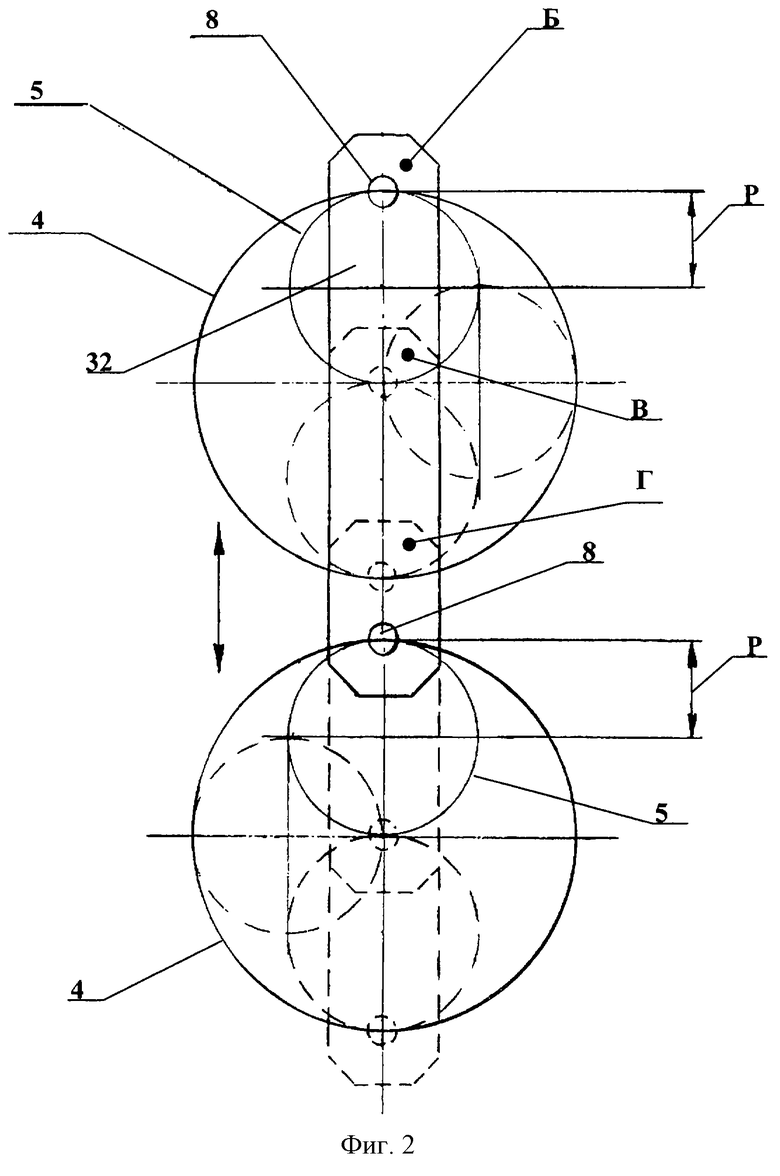
фиг. 2. - схема поступательного движения жесткого соединительного звена кривошипов планетарных механизмов устройства преобразования движения;
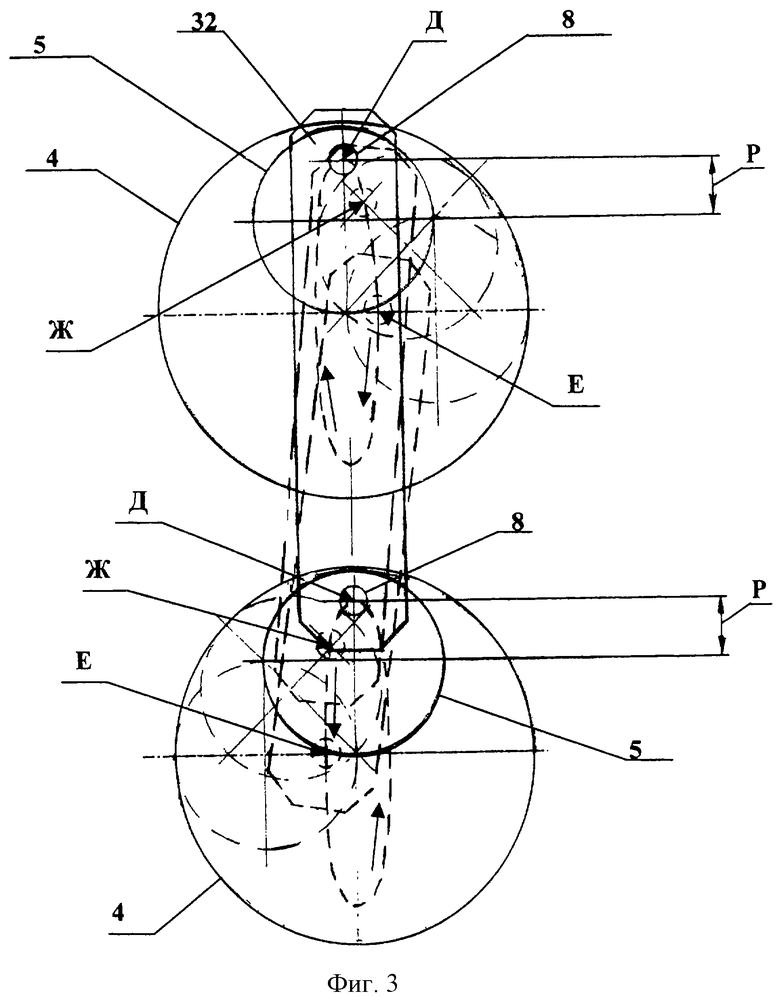
фиг.3. - схема сложного движения жесткого соединительного звена кривошипов планетарных механизмов устройства преобразования движения.
Устройство преобразования движения включает два аналогичных (одинаковых) друг другу планетарных механизма 1 и 2. Каждый из планетарных механизмов 1 и 2 содержит корпус 3, в частном случае выполненный за одно целое в виде единой детали с центральным зубчатым колесом 4, имеющим внутреннее зубчатое зацепление с сателлитом 5, диаметр d делительной окружности которого равен половине диаметра D1 делительной окружности центрального зубчатого колеса 4, вал 6 сателлита 5, установленный во взаимодействующем с корпусом 3 водиле 7, ось вращения L которого совпадает с продольной осью симметрии центрального зубчатого колеса 4, кривошип 8, связанный с сателлитом 5 с параллельным расположением их осей вращения М и N соответственно.
В каждом планетарном механизме 1 и 2 водило 7 образовано двумя частями 9 и 10, расположенными напротив торцевых плоскостей "α" и "β" центрального зубчатого колеса 4 и взаимодействующими с корпусом 3 через основные подшипниковые узлы качения 11, соосные с центральным зубчатым колесом 4. В частном случае выполнения, представленном на фиг.1, части 9 и 10 водила 7 каждого из планетарных механизмов 1 и 2 выполнены дискообразной формы с плоскими поверхностями 12 расположенными с зазорами S напротив торцов Т центрального зубчатого колеса 4, причем на части 9 водила 7 каждого планетарного механизма 1 и 2 выполнен цилиндрический выступ 13, соосный оси вращения L водила 7. В частном случае выполнения основные подшипниковые узлы качения 11 каждого из планетарных механизмов 1 и 2 выполнены в виде радиально-упорных шариковых подшипников, дорожки качения 14 и 15 которых выполнены соответственно на частях 9, 10 водила 7 и на корпусе 3, причем диаметры этих дорожек качения 14 и 15 больше диаметра "D1" делительной окружности центрального зубчатого колеса 4.
В каждом из планетарных механизмов 1 и 2 сателлит 5 жестко соединен, а в частном случае, показанном на фиг.1, выполнен за одно целое в виде единой детали со своим валом 6, установленным в обоих частях 9 и 10 водила 7 через дополнительные подшипниковые узлы качения 16.
В каждом из планетарных механизмов 1 и 2 кривошип 8 связан с сателлитом 5 посредством закрепления его (кривошипа 8) с возможностью изменения межосевого расстояния Р между ним (кривошипом 8) и валом 6 сателлита 5 (т.е. между их осями вращении М и N) на установочном элементе 17 регулировочного устройства 18, которое своим опорным элементом 19, взаимодействующим со своим установочным элементом 17, закреплено на одном из концов вала 6 сателлита 5. В частном случае выполнения (см. фиг.1) в установочном 17 и опорном 19 элементах регулировочного устройства 18 каждого из планетарных механизмов 1 и 2 выполнены соответствующие по форме и размерам взаимодействующие между собой выступ 20 и паз 21 соответственно, которые расположены поперечно к валу 6 сателлита 5, причем установочный элемент 17 регулировочного устройства 18 зафиксирован относительно его опорного элемента 19 посредством фиксирующего болта 22. В каждом планетарном механизме 1 и 2 путем ослабления фиксирующего болта 22 и перемещения выступа 20 установочного элемента 17 по пазу 21 опорного элемента 19 регулировочного устройства 18 можно изменить межосевое расстояние Р и зафиксировать его путем затяжки болта 22. В другом частном случае в планетарных механизмах 1 и 2 изменения межосевых расстояний Р между осями вращении М кривошипов 8 и осями вращении N валов 6 сателлитов 5 может осуществляться без остановки механизма (так сказать "на ходу"), например, с помощью пневмо- или гидроэлементов, размещенных между установочными 17 и опорными 19 элементами регулировочных устройств 18. Различные по величине межосевые расстояния Р между осями вращении М кривошипов 8 и осями вращении N валов 4 сателлитов 5 (но одинаковые между собой в каждом планетарном механизме 1 и 2) позволяют получить различные траектории движения кривошипов 8.
В частном случае выполнения в каждом из планетарных механизмов 1 и 2 дополнительные подшипниковые узлы качения 16 выполнены в виде радиально-упорных шариковых подшипников, дорожки качения 23 и 24 которых выполнены соответственно на частях 9, 10 водила 7, а дорожки 25 и 26 - соответственно на опорной втулке 27, установленной на конце вала 6 сателлита 5 со стороны части 9 водила 7 и на опорном элементе 19 регулировочного устройства 18.
Обе части 9 и 10 водила 7 каждого из планетарных механизмов 1 и 2 жестко связаны между собой, в частности, через один компенсатор 28, выполненный в виде массивной детали, занимающей свободное пространство между частями 9 и 10 водила 7. Через компенсатор 28 и части 9 и 10 водила 7 каждого из планетарных механизмов 1 и 2, в частности, проходят два стяжных болта 29, которые обеспечивают жесткую связь между этими частями 9 и 10 водила 7. Компенсатор 28 каждого из планетарных механизмов 1 и 2 обеспечивает необходимые рабочие зазоры в основных подшипниковых узлах 11 и балансировку масс планетарного механизма.
В устройстве преобразования движения корпуса 3 планетарных механизмов 1 и 2 неподвижно взаимосвязаны друг с другом с параллельным расположением продольных осей симметрии L их центральных зубчатых колес 4, в частном случае выполнения, показанном на фиг.1, корпуса 3 его планетарных механизмов 1 и 2 неподвижно взаимосвязаны между собой посредством общего корпуса 30, в котором они неподвижно установлены.
Водилы 7 планетарных механизмов 1 и 2 подвижно взаимосвязаны между собой кинематической связью с передаточным числом, равным единице, в частности, выполненной (как показано на фиг.1) в виде взаимодействующих между собой зубчатых шестерен 31 с одинаковыми диаметрами D2 их делительных окружностей, жестко установленных соответственно на цилиндрических выступах 13 частей 9 водил 7 планетарных механизмов 1 и 2 (т.е. шестерни 31 установлены неподвижно без проворотов на соответствующих выступах 13 частей 9 водил 7).
В другом частном случае (на чертежах не показано) кинематическая связь между водилами 7 планетарных механизмов 1 и 2 может быть выполнена, например, в виде взаимодействующих между собой, но в отличии от предыдущего случая - уже через паразитную шестерню, зубчатых шестерен с одинаковыми диаметрами D2 их делительных окружностей (подобных зубчатым шестерням 31), жестко установленных на цилиндрические выступы 13 частей 9 или части 10 водил 7 (с некоторыми доработками посадочных мест на этих частях 10) планетарных механизмов 1 и 2.
Кривошипы 8 планетарных механизмов 1 и 2 кинематически взаимосвязаны между собой через жесткое соединительное звено 32 (при преобразовании вращательного движения водил 7 в иное, жесткое соединительное звено 32 является ведомым звеном), в частном случае выполнения, показанном на фиг.1, жесткое соединительное звено 32 выполнено в виде планки и соединено с кривошипами 8 через подшипниковые узлы 33.
В случае выполнения кинематической связи между водилами 7 планетарных механизмов 1 и 2 с паразитной шестерней - они (водилы 7) будут вращаться в одном направлении и тогда появляется возможность получить такое сложное движение жесткого соединительного звена 32, при котором все точки на нем совершают движения по замкнутым траекториям, имеющим одинаковую форму (конгруэнтную форму).
Работает устройство преобразования движения следующими образом.
Устройство преобразования движения может работать в режиме преобразования вращательного движения в поступательное или иное (сложное) в зависимости от межосевых расстояний "Р" в планетарных механизмах 1 и 2 или в обратном режиме, т. е. преобразования поступательного движения или иного (сложного) во вращательное движение.
Рассмотрим режим преобразования вращательного движения в поступательное или иное (сложное).
При подаче вращательного движения на одну из зубчатых шестерен 31 устройства преобразования движения в каждом из планетарных механизмов 1 и 2 части 9 и 10 их водил 7 вращаются относительно их корпусов 3 через основные подшипниковые узлы 11, при этом оси вращении N их валов 6 сателлитов 5 будут перемещаться по окружностям с диаметрами, равными диаметрам d делительных окружностей их сателлитов 7, так как эти диаметры d делительных окружностей их сателлитов 5 равны половине диаметров D1 делительных окружностей их центральных зубчатых колес 4, и при этом, так как сателлиты 5 имеют зубчатые зацепления с центральными зубчатыми колесами 4 и жестко связаны со своими валами 6, то последние (валы 6) будут вращаться относительно своих осей вращении N. При условии, если оси вращении М кривошипов 8 находится на делительных окружностях сателлитов 5, т.е. когда межосевые расстояния Р между осями вращении М кривошипов 8 и осями вращении N валов 6 равны половине диаметров делительных окружностей сателлитов 5 (это обеспечивается регулировочными устройствами 18), то при повороте (вращении) валов 6 в частях 9, 10 водил 7, которые в свою очередь одновременно перемещаются по окружностям, кривошипы 8 вращаются относительно своих осей вращении М, которые в свою очередь совершают возвратно-поступательные движения по прямым линиям (векторам движения), проходящим через продольные оси симметрии центральных зубчатых колес 4, совпадающих с их осями вращения L водил 7 и тем самым перемещают возвратно-поступательно жесткое соединительное звено 32 без наличия каких-либо направляющих для него.
На фиг.2 схематично показан случай, когда в каждом планетарном механизме 1 и 2 межосевые расстояния P=1/2d, при которых кривошипы 8, а следовательно, и жесткое соединительное звено 32 совершают поступательные движения, так, например, произвольная точка на звене 32 поступательно перемещается из крайнего положения Б через какое-то промежуточное положение В в крайнее положение Г и обратно.
Если поменять положения кривошипов 8 на 180 градусов (т.е. отвернуть стяжные болты 22 регулировочных устройств 18 и установочные элементы 17 вынуть из опорных элементов 19, развернуть их на 180 градусов и снова установить их в опорных элементах 19), сохраняя расположения осей вращении М кривошипов 8 на делительных окружностях сателлитов 5 (т.е. сохраняя прежние параметры межосевых расстояний Р), то их (кривошипов 8) вектора (направления) возвратно-поступательных движений изменятся на 90 градусов относительно предыдущих, следовательно, то же самое произойдет с вектором (направлением) возвратно-поступательного движения жесткого соединительного звена 32. В этом случае вектора возвратно-поступательных движений кривошипов 8 будут также проходить через продольные оси симметрии центральных зубчатых колес 4 планетарных механизмов 1 и 2.
При изменении параметров межосевых расстояний Р кривошипы 8 (точнее их оси вращении М) планетарных механизмов 1 и 2 будут совершать движения, отличные от возвратно-поступательных, и описывать в пространстве какие-то определенные фигуры, как и любая точка на жестком соединительном звене 32.
На фиг.3 схематично показан случай, когда в каждом планетарном механизме 1 и 2 межосевые расстояния P<1/2d, но равны между собой, при которых кривошипы 8 (точнее их оси вращении М) и жесткое соединительное звено 32 (точнее любая его точка) совершают иные (сложные, отличные от возвратно-поступательных) движения, причем в данном случае, когда водилы 7 планетарных механизмов 1 и 2 связаны непосредственно через зубчатые шестерни 31, кривошипы 8 (точнее их оси вращении М) совершают движения по одним сложным траекториям - одинаковым между собой, а любая точка, взятая на жестком соединительном звене 32, совершает движение по другой сложной траектории. Так, например, каждая из двух точек, совпадающих соответственно с осями вращении М кривошипов 8 планетарных механизмов 1 и 2, последовательно перемещается из положения Д в положение Ж, а из него в "Е" и далее опять в положение Д, т.е. по замкнутой траектории.
Таким образом, за счет применения в заявляемом техническом решении устройства преобразования движения в каждом планетарном механизме 1 и 2 двухопорной схемы установки водила 7 в корпусе 3 и двухопорной схемы установки вала 6 сателлита 5 в водило 7, а также за счет применения в качестве опор водила 7 и вала 6 сателлита 5 именно подшипниковых узлов качения (основных 11 и дополнительных 16 подшипниковых узлов качения, а не скольжения - как в прототипе) и за счет применения компенсатора 28 по сравнению с конструкцией прототипа решается задача изобретения: увеличение надежности и долговечности в целом устройства преобразования движения, снижение внутреннего дисбаланса каждого планетарного механизма, а значит и внутреннего дисбаланса в целом устройства преобразования до минимального значения, повышение КПД (коэффициента полезного действия) последнего.
Кроме того, за счет применения в заявляемом техническом решении устройства преобразования движения двух планетарных механизмов 1 и 2 с регулировочными устройствами 18, позволяющими легко изменять параметры межосевых расстояний Р между осями вращения М кривошипов 8 и осями вращении N валов 6 сателлитов 5 соответственно и тем самым изменять вектора перемещений кривошипов 8, а значит и жесткого соединительного звена 32 по сравнению с конструкцией прототипа решается и такая задача изобретения, как расширение функциональных возможностей устройства - преобразование вращательного движения водил 7 в иное ведомого звена - жесткого соединительного звена 32 без направляющих, в том числе в возвратно-поступательное, и наоборот.
Заявляемое техническое решение устройства преобразования движения может быть использовано в различных устройствах, где требуется:
- преобразовать вращательное движение водил в возвратно-поступательное жесткого соединительного звена без направляющих;
- преобразовать вращательное движение водил в иное сложное движение жесткого соединительного звена без направляющих по определенной заданной траектории (в зависимости от Р);
- преобразование вращательного движения водил в возвратно-поступательное движение жесткого соединительного звена без направляющих с переходом в иное (сложное) движение его, не останавливая устройство (т.е. на "ходу", когда Р может изменяться в процессе работы устройства);
- преобразование возвратно-поступательного движения или иного (сложного) движения жесткого соединительного звена во вращательное движения водил.
Устройство преобразования движения, например, может быть использовано в дискретно подающих механизмах, в которых исполнительный инструмент, например резец, устанавливается непосредственно на жесткое соединительное звено для выполнения операции по обработки детали сложной формы, или устройство может быть использовано для распиловки различного материала (дерева, металла) - в этом случае на жесткое соединительное звено закрепляется пила, и может использоваться (устройство) в других разнообразных машинах и узлах.
Изобретение относится к машиностроению, а именно к устройствам преобразования движения. Устройство преобразования движения включает два аналогичных друг другу планетарных механизма 1 и 2, каждый из которых содержит корпус 3 с центральным зубчатым колесом 4, имеющим внутреннее зубчатое зацепление с сателлитом 5, диаметр d делительной окружности которого равен половине диаметра D1 делительной окружности центрального зубчатого колеса 4, вал 6 сателлита 5, установленный во взаимодействующем с корпусом 3 водиле 7, ось вращения L которого совпадает с продольной осью симметрии центрального зубчатого колеса 4, кривошип 8, связанный с сателлитом 5 с параллельным расположением их осей вращении М и N соответственно. В каждом механизме водило 7 образовано двумя частями 9 и 10, расположенными напротив торцевых плоскостей α и β центрального зубчатого колеса 4 и взаимодействующими с корпусом 3 через основные подшипниковые узлы качения 11, соосные с центральным зубчатым колесом 4. В каждом из механизмов сателлит 5 жестко соединен со своим валом 6, установленным в обеих частях 9 и 10 водила 7 через дополнительные подшипниковые узлы качения 16. В каждом из механизмов 1 и 2 кривошип 8 связан с сателлитом 5 посредством закрепления его с возможностью изменения межосевого расстояния Р между ним и валом 6 сателлита 5 на установочном элементе 17 регулировочного устройства 18, которое своим опорным элементом 19 закреплено на одном из концов вала 6 сателлита 5. Обе части 9 и 10 водила 7 каждого механизма жестко связаны между собой через один компенсатор 28. В устройстве корпусы 3 механизмов неподвижно взаимосвязаны друг с другом. Водилы 7 механизмов взаимосвязаны между собой зубчатыми шестернями 30 с одинаковыми диаметрами D их делительных окружностей. Кривошипы 8 механизмов кинематически взаимосвязаны между собой через жесткое соединительное звено 31. Технический результат - увеличение надежности и долговечности устройства, снижение его внутреннего дисбаланса, повышение КПД. 16 з.п.ф-лы, 3 ил.
| US 4630327, 23.12.1986 | |||
| RU 2059133 С1, 27.04.1996 | |||
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ВО ВРАЩАТЕЛЬНОЕ И НАОБОРОТ | 1991 |
|
RU2020333C1 |
| Автоматическая линия | 1984 |
|
SU1284789A1 |
| СПОСОБ РАЗГОНА ГЛИССИРУЮЩЕГО СУДНА | 2019 |
|
RU2716514C1 |
| US 3861223, 21.06.1975 | |||
| WO 00/37827 А1, 29.06.2000 | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

