Изобретение относится к области управления движением космических аппаратов (КА), классу систем стыковки и расстыковки космических кораблей или их частей, например, устройств для причаливания и может быть использовано для организации стыковки активного космического аппарата с пассивным космическим аппаратом при проведении операций орбитального обслуживания.
Известно защищенное патентом изобретение - аналог: патент RU №2090463, МПК B64G 1/24, «Система стабилизации космического аппарата» (Гришин В.Н., Дубчак B.C., Климов В.А., Охапкин В.А., Панков О.В.). Система стабилизации КА содержит каналы управления по тангажу и рысканью из последовательно соединенных датчика отклонения углового ускорения и угловой скорости, суммирующего усилителя и рулевой машинки, датчика отклонения линейного ускорения и линейной скорости, двигательной установки, камера сгорания которой установлена с возможностью линейного перемещения вдоль поперечной оси КА. Данная система обеспечивает автономное управление КА безотносительно его движения по сравнению с другими космическими объектами и поэтому является неэффективной для проведения операций орбитального обслуживания.
Известно защищенное патентом изобретение - аналог: патент RU №22505461, заявка РСТ: US 2010/057665 20101122, публикация РСТ: WO 2011/066233 20110603, МПК B64G 1/24, B64G 1/26, «Стабилизация движения неустойчивых фрагментов космического мусора» (Поулос Деннис, США). Предложенный способ относится к управлению движением космических объектов и обеспечивает стабилизацию относительного движения фрагментов космического мусора (вокруг собственного центра масс). Способ стабилизации движения указанных фрагментов включает приложение силы к фрагменту в определенных расчетных точках. Силу, воздействующую на фрагмент, создают с использованием пневматического действия газового факела, генерируемого на борту находящегося рядом КА. Газовый факел может создаваться устройствами типа ракетных двигателей разного рода. При этом возможно одновременное изменение орбиты фрагмента космического мусора. К недостаткам способа следует отнести сложность позиционирования ракетных двигателей КА относительно фрагмента космического мусора, а также необходимость компенсации импульса, создаваемого этими ракетными двигателями, для удержания КА в требуемой орбитальной позиции.
Известно защищенное патентом изобретение - аналог: патент RU №2521082 МПК B64G 1/64, «Способ стыковки космических аппаратов и устройство для его реализации» (Трушляков В.И., Юткин Е.А., Макаров Ю.Н., Олейников И.И., Шатров Я.Т.). Согласно способу выполняют стыковку двух КА, один из которых пассивный, а другой, сближающийся с ним - активный. Способ включает использование самонаводящегося космического микробуксира для доставки троса, выпускаемого с активного КА при сближении с пассивным КА на минимальное расстояние и оснащенного стыковочным штырем. Далее выполняют стягивание КА с помощью троса. Способ отличается тем, что в качестве устройства зацепления на пассивном КА используют сопло маршевого двигателя, вводят стыковочный штырь в камеру двигателя и при проходе критического сечения двигателя, достигнув передней стенки камеры сгорания, последовательно задействуют устройства фиксации и стягивания, установленные на стыковочном штыре. В процессе стягивания синхронизируют угловые скорости связки микробуксира и пассивного КА и активного КА, совмещают продольные оси активного КА и связки с направлением линии, соединяющей их центры масс, осуществляют стабилизацию углового положения, с помощью продольных ускорений, развиваемых двигателями АКА и КМБ, осуществляют снижение натяжения троса до минимального. После касания связки с посадочным местом на активном КА осуществляют фиксацию связки с помощью системы, установленной на активном КА.
Недостатком способа является механическое повреждение двигательной установки пассивного КА устройством фиксации, что исключает возможность дальнейшего его использования при проведении операций орбитального обслуживания.
Известно изобретение, защищенное патентом RU №2603301 МПК B64G 1/64 «Способ синхронизации угловых скоростей движения активного космического аппарата с пассивным космическим аппаратом» (Яковлев М.В., Яковлева Т.М., Яковлев Д.М.).
Согласно способу управляют угловыми скоростями активного космического аппарата по данным наблюдения пассивного космического аппарата, причем наблюдают фигуру треугольника, вершинами которого являются изображения трех отражающих элементов, установленных на пассивном космическом аппарате и расположенных на максимальном удалении от его центра тяжести, а управление угловыми скоростями выполняют до момента регистрации неподвижной фигуры треугольника.
Для реализации способа-прототипа на активном КА устанавливают генератор излучения, устройство приема сигналов, отраженных от пассивного КА, и аппаратуру преобразования принятых сигналов в изображение на плоском регистраторе (ПЗС матрице или плоском экране), пространственное положение которого жестко фиксировано в собственной системе координат активного КА. На пассивном КА устанавливают три отражающих элемента, которые расположены на максимальном удалении от его центра тяжести. В пределах угла ~4π стерадиан каждый из трех отражающих элементов имеет высокий коэффициент отражения излучения, генерируемого активным КА, по сравнению с другими элементами конструкции пассивного КА. На плоском регистраторе активного КА изображение отражающих элементов пассивного КА будет представлено в виде трех светящихся точек, которые образуют фигуру треугольника. Условие максимального удаления отражающих элементов от центра тяжести пассивного КА обеспечивает максимальное линейное разрешение светящихся точек в плоскости регистратора.
Произвольное угловое движение пассивного КА вызывает изменение фигуры треугольника: изменяются длины сторон треугольника, периодически исчезает одна из вершин треугольника и треугольник преобразуется в отрезок прямой линии. Последнее происходит за счет затенения одного из отражающих элементов элементами конструкции пассивного КА в процессе его углового движения. Управление угловыми скоростями активного КА выполняют до момента регистрации неподвижной фигуры треугольника что соответствует синхронизации углового движения космических аппаратов.
Данное изобретение выбрано прототипом.
Недостатком способа по выбранному прототипу является необходимость заблаговременного оборудования пассивного КА дополнительным оборудованием - тремя отражателями излучения, генерируемого активным КА. Поэтому пассивный КА проектируется как объект, кооперируемый с комплексом активных КА. Для пассивных КА, не оборудованных специализированными отражателями излучения, указанный способ неприменим.
Сущность предлагаемого изобретения заключается в обеспечении синхронизации вращения активного космического аппарату с пассивным для проведения операции его обслуживания, для чего активный космический аппарат оснащают системой наблюдения за пассивным космическим аппаратом с моделью его визуального образа, используя которую для сравнения с данными системы наблюдения, определяют параметры движения пассивного космического аппарата, рассчитывают команды системы управления для двигательной установки, обеспечивающих придание активному космическому аппарату необходимого вращения и его поддержание в течение проведения операции облуживания. При таком способе не требуется наличие на пассивном космическом аппарате ответных устройств для его обнаружения и индикации.
Целью предполагаемого изобретения является придание активному космическому аппарату вращения с угловой скоростью равной угловой скорости собственного вращения пассивного космического аппарата после приближения к нему на расстояние создания позиции, необходимой для последующего выполнения операции орбитального обслуживания. При синхронном вращении активного и космического аппарата достигается неподвижность их взаимного положения в собственной системе координат, что является необходимым условием для выполнения операции обслуживания: захвата пассивного космического аппарата манипулятором, стыковки для заправки компонентами топлива, ремонта, неконтактного силового воздействия, других видов операции.
Указанная цель в заявляемом способе синхронизации угловых скоростей движения активного космического аппарата с пассивным космическим аппаратом достигается использованием системы наблюдения за пассивным космическим аппаратом и обработкой информации его визуального образа при сравнении с параметрами его образа, заложенными в память активного космического аппарата для определения характеристик его вращения при удержании заданной дистанции между центрами масс космических аппаратов.
Способ синхронизации угловой скорости вращения активного космического аппарата с пассивным космическим аппаратом для выполнения операции обслуживания, при управлении угловыми скоростями активного космического аппарата по данным наблюдения пассивного космического аппарата, заключается в том, что в систему наблюдения и управления активного космического аппарата вводят программу с визуальным образом пассивного космического аппарата, например его сверткой до индикаторной линии на контуре пассивного космического аппарата, активный космический аппарат выводят на орбиту пассивного космического аппарата на расчетное расстояние между центрами масс космических аппаратов, включают систему наблюдения за пассивным космическим аппаратом, сравнивают показания размера и положения фактической индикаторной линии с данными индикаторной линии визуального образа пассивного космического аппарата, определяют угловую скорость его собственного одноосного вращения и выдают команды для импульсного включения двигательной установки на придание вращения активного космического аппарата, синхронного с вращением пассивного космического аппарата.
Сущность изобретения иллюстрируется следующими фигурами:
фиг. 1 - выведение активного космического аппарата на заданную позицию около пассивного космического аппарата на его орбите;
фиг. 2 - включение системы наблюдения активного космического аппарата для определения параметров линейных координат и осевого вращения пассивного космического аппарата, сравнения их с моделью визуального образа и выдача команд для двигателей на уточнение положения относительно пассивного космического аппарата и осевую раскрутку активного космического аппарата;
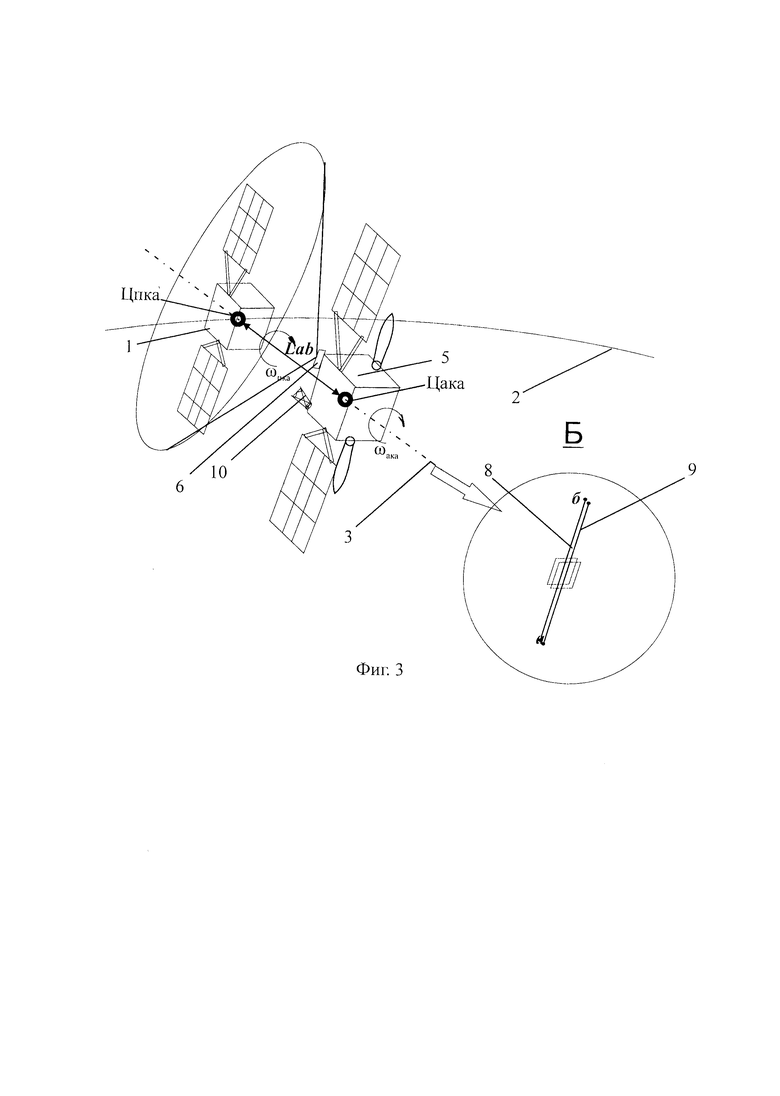
фиг 3 - синхронное вращение активного и пассивного космических аппаратов на расстоянии, обеспечивающем создание позиции необходимой для последующего сближения с пассивным космическим аппаратом и выполнения операции орбитального обслуживания.
Реализация способа осуществляется следующим образом.
Пассивный космический аппарат 1 (фиг. 1) находится, например, в одноосевом вращении ωпка при движении по своей орбите 2, ось вращения 3 совпадает с осью инерции пассивного космического аппарата и поверхность его обслуживания 4 перпендикулярна этой оси.
Для выполнения операции обслуживания в ближнюю область на орбиту 2 пассивного космического аппарата с помощью наземных средств управления выводят активный космический аппарат 5. По параметрам движения пассивного космического аппарата определяют направление оси его собственного одноосного вращения и выводят активный космический аппарат на линию этой оси, используя устройства управления при ближней стыковке, например систему «Курс-Л», разработанную АО «Научно-исследовательский институт точных приборов» (НИИ ТП) (входит в холдинг «Российские космические системы»), и обеспечивают удержание этой линии центра масс активного космического аппарата во время Τ проведения операции орбитального обслуживания.
По результатам измерения взаимного положения космических аппаратов рассчитывают необходимые импульсные команды двигательной системы активного космического аппарата для занятия позиции на оси вращения пассивного космического аппарата со стороны поверхности его обслуживания и производят раскрутку активного космического аппарата до скорости вращения ωака равную по величине и фазе скорости вращения ωпка пассивного космического аппарата. Скорость вращения ωака активного космического аппарата поддерживают постоянной, внося периодические поправки в случае изменения скорости вращения ωпка пассивного космического аппарата. Для этого активный космический аппарат 5 в дополнение к бортовой системе управления оснащают системой наблюдения 6 с датчиками (угол обзора α) и блоком обработки информации в программу которого вводят визуальный 3-D образ пассивного космического аппарата. В целях экономии информации и повышении быстродействия в программу вводят данные по контуру 7 пассивного космического аппарата, сворачивают эти данные в характерную индикаторную форму, например, вычисляют индикаторную линию 8. Для определения индикаторной линии 8 на контуре изображения ПКА 7 выделяют две распознаваемые виртуальные граничные точки a и b на возможно большом расстоянии между ними Lab при условии отсутствия на этом расстоянии участков с относительным перемещением точек между ними, например существенным колебанием солнечных батарей [К.И. Кий. Виртуальные граничные точки и контуры контрастных объектов: новый подход к анализу движения в реальном времени. Федеральное государственное бюджетное учреждение науки Институт прикладной математики им. М.В. Келдыша Российской академии наук (ИПМ РАН), Москва. Стр. 112-117 в «Сборнике трудов научно-технической конференции техническое зрение в системах управления» под редакцией Р.Р. Назирова. ИКИ РАН, Механика, Управление и Информатика, Москва, 2012].
В блоке обработки информации системы наблюдения используют введенное значения индикаторной линии 7, включая ее нормализованный размер и положение, для сравнения с изображением пассивного космического аппарата на котором выделяется фактическая индикаторная линия 8.
При сравнении размера и положения фактической индикаторной линии со значениями индикаторной линии образа пассивного космического аппарата определяют характеристики движения пассивного космического аппарата в собственных координатах x, y, z, ωxпка, ωyпка, ωzпка. В данном примере показано одноосное вращение пассивного космического аппарата ωпка.
При выполнении синхронизации вращения пассивного космического аппарата с активным космическим аппаратом в блоке отображают и оценивают рассогласование размера и положения индикаторных линий от наблюдаемого пассивного космического аппарата 8 и индикаторной линии образа ПКА 9 в памяти активного космического аппарата. Пример рассогласования показан на виде А (рассогласование β) (фиг. 2).
При достижении синхронизации вращения космических аппаратов индикаторные линии: наблюдаемая от пассивного космического аппарата и из образа активного космического аппарата совпадают, пример на виде Б (фиг. 3) и такое совпадение поддерживается с помощью работы двигательной установки активного космического аппарата в течение всего процесса проведения орбитального обслуживания (до момента установления жесткой связи космических аппаратов).
Окончательная позиция, которую создают для активного космического аппарата, это совместное постоянное синхронное вращение активного 5 и пассивного 1 космических аппаратов на одной оси на расстоянии Lab между центрами масс космических аппаратов, задаваемым из требований баллистики. Их необходимо обеспечить по условиям уменьшения риска столкновения космических аппаратов. Для этого задают величину радиуса безопасности, который ограничивает пространство вблизи цели стыковки и определяет переход от полярного управления активным космическим аппаратом к использованию систем ближнего причаливания.
Таким образом, осуществляют управление двумя независимыми движениями активного космического аппарата: а) движением центра масс активного космического аппарата и б) вращением активного космического аппарата вокруг своего центра масс.
В первом случае необходимо учесть ограничения на время Тоо удержания космических аппаратов на расстоянии Lab. Это время необходимо для надежного обеспечения выполнения операции орбитального обслуживания, но оно ограничено условиями орбитального движения космических аппаратов. Так, это особенно критично при движении на высокоэллиптических орбитах когда расстояние между аппаратами будет быстро меняться и потребуются затраты топлива на его компенсацию. Также на изменение расстояния Lab будет влиять разница наклонений орбит активного космического аппарата и пассивного космического аппарата и другие факторы возмущения движения [Основы теории полета космических аппаратов. Под ред. Г.С. Нариманова, М.К. Тихомирова. Изд. «Машиностроение» Москва, 1972].
Для обеспечения вращения активного космического аппарата вокруг своего центра масс проводят оценку энергетических затрат на его раскрутку и рассчитывают запас топлива для выполнения этой процедуры.
Исходные параметры: момент инерции активного космического аппарата относительно оси вращения
Jz=miz2,
где m - масса активного космического аппарата;
iz - радиус инерции активного космического аппарата относительно оси 3.
Моменты сил вращения М0, создаваемых двигательной установкой активного космического аппарата
М0=r×Ρ,
где r - радиус-вектор приложения силы;
Ρ - сила, создаваемая двигательной установкой активного космического аппарата.
Момент количества движения при вращении активного космического аппарата LO вокруг оси 3
LO=r×mV,
где V - линейная скорость при вращении активного космического аппарата на конце вектора r
По заданному проектным расчетом Р, исходя из показателей характеристик двигателей активного космического аппарата - их удельного импульса, удельной тяги, определяют количество топлива для обеспечения создания и поддержания момента количества движения при вращении активного космического аппарата LO вокруг оси 3, необходимого за время Τ подготовки и выполнения операции орбитального обслуживания [А.А. Яблонский. Курс теоретической механики. Ч. 2. Высшая школа. 1964].
Из позиции совместного синхронного вращения активного и пассивного космических аппаратов на контролируемом расстоянии между ними производят дальнейшие действия по обслуживанию пассивного космического аппарата, которые заключаются, например, в том, что сокращают расстояния между аппаратами и производят захват пассивного космического аппарата манипулятором 10, или осуществляют стыковку космических аппаратов для дозаправки компонентами топлива или проводят другие операции.
Предлагаемый способ может быть реализован также в случаях двухосного или трехосного вращения пассивного космического аппарата вокруг центра массы. В этом случае добиваются синхронизации вращения активного космического аппарата по каждой из этих осей так, чтобы ось активного космического аппарата в сложном вращении совпадала с осью пассивного космического аппарата со стороны поверхности обслуживания.
Технический эффект при реализации предлагаемого способа заключается в расширении возможностей проведения операций с пассивными космическими аппаратами находящимися в собственном вращательном движении, как прекратившими срок активного существования, так и действующими, но пришедшими по какой-либо причине во вращательное движение. Экономический эффект от применения способа зависит от характера и вида орбитального обслуживания пассивного космического аппарата при оценке комплекса всех необходимых затрат конкретного проекта, который, например, решает задачу удаления космического мусора, дозаправку топливом космического аппарата, ремонт элементов космического аппарата, изменение его орбиты и др.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СИНХРОНИЗАЦИИ УГЛОВЫХ СКОРОСТЕЙ ДВИЖЕНИЯ АКТИВНОГО КОСМИЧЕСКОГО АППАРАТА С ПАССИВНЫМ КОСМИЧЕСКИМ АППАРАТОМ | 2015 |
|
RU2603301C1 |
| Способ управления сервисным космическим аппаратом при бесконтактном удалении фрагментов космического мусора | 2019 |
|
RU2720606C1 |
| Способ синхронизации угловых скоростей активного космического аппарата с пассивным космическим аппаратом | 2017 |
|
RU2662318C1 |
| СПОСОБ СТЫКОВКИ КОСМИЧЕСКИХ АППАРАТОВ | 2012 |
|
RU2521082C2 |
| Способ стабилизации углового движения некооперируемого объекта при бесконтактной транспортировке | 2018 |
|
RU2684022C1 |
| Способ определения времени до встречи активного объекта с космическим аппаратом при параллельном сближении | 2017 |
|
RU2668140C1 |
| Устройство автоматической стыковки космических аппаратов в операциях орбитального обслуживания | 2017 |
|
RU2669763C1 |
| Способ безопасного сближения сервисного космического аппарата с обслуживаемым космическим аппаратом | 2019 |
|
RU2711487C1 |
| Способ изменения траектории опасного космического объекта | 2019 |
|
RU2745378C1 |
| Способ инспекции космических аппаратов в области низких околоземных круговых орбит | 2019 |
|
RU2720758C1 |


Изобретение относится к управлению относительным движением активного (АКА) и пассивного (ПКА) космических аппаратов. Способ включает введение в систему наблюдения и управления АКА программы с визуальным образом ПКА, например свернутым до индикаторной линии на контуре ПКА. АКА выводят на орбиту ПКА на расчетное расстояние между центрами их масс, включают систему наблюдения за ПКА, сравнивают показания размера и положения фактической индикаторной линии с данными индикаторной линии визуального образа ПКА, определяют угловую скорость собственного одноосного вращения ПКА и выдают команды для импульсного включения двигательной установки на придание вращения АКА, синхронного с вращением ПКА. Технический результат состоит в упрощении системы управления движением АКА. 3 ил.
Способ синхронизации угловой скорости вращения активного космического аппарата с пассивным космическим аппаратом для выполнения операции обслуживания при управлении угловыми скоростями активного космического аппарата по данным наблюдения пассивного космического аппарата, отличающийся тем, что в систему наблюдения и управления активного космического аппарата вводят программу с визуальным образом пассивного космического аппарата, например его сверткой до индикаторной линии на контуре пассивного космического аппарата, активный космический аппарат выводят на орбиту пассивного космического аппарата на расчетное расстояние между центрами масс космических аппаратов, включают систему наблюдения за пассивным космическим аппаратом, сравнивают показания размера и положения фактической индикаторной линии с данными индикаторной линии визуального образа пассивного космического аппарата, определяют угловую скорость его собственного одноосного вращения и выдают команды для импульсного включения двигательной установки на придание вращения активного космического аппарата, синхронного с вращением пассивного космического аппарата.
| US 5119305 A1, 06.02.1992 | |||
| СПОСОБ СИНХРОНИЗАЦИИ УГЛОВЫХ СКОРОСТЕЙ ДВИЖЕНИЯ АКТИВНОГО КОСМИЧЕСКОГО АППАРАТА С ПАССИВНЫМ КОСМИЧЕСКИМ АППАРАТОМ | 2015 |
|
RU2603301C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНЫХ ПОЛОЖЕНИЯ И ТРАЕКТОРИИ ДВУХ КОСМИЧЕСКИХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2103202C1 |

