Изобретение относится к ветроэнергетике и может быть использовано для повышения энергоэффективности ветроэнергетических установок (ВЭУ).
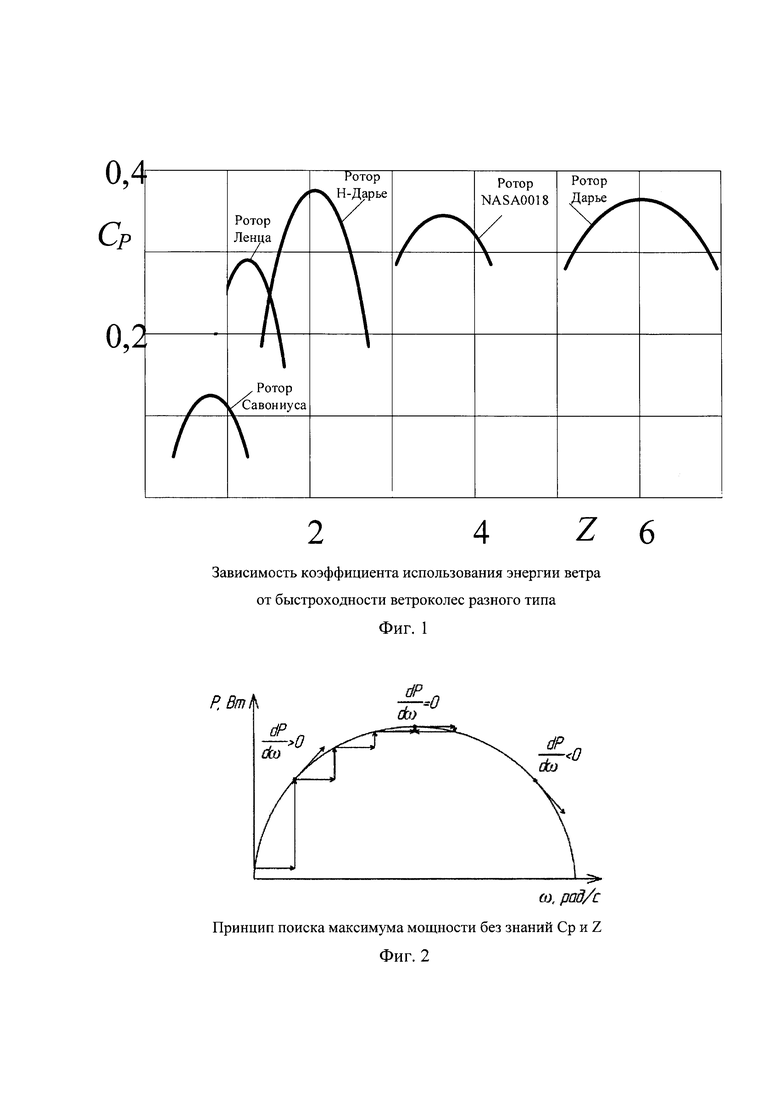
Независимо от конструкции ветроколеса и типа электрического генератора мощность ВЭУ зависит от соотношения скорости вращения ротора и скорости ветра. При этом для каждого значения скорости ветра ВЭУ имеет свой максимум мощности при определенной скорости вращения ротора. На фиг. 1 приведены зависимости CP от быстроходности ветроколеса Z для разных типов ветроколес. Основной характеристикой ветроустановок является коэффициент использования энергии ветра CP, по смыслу сходный с коэффициентом полезного действия. Быстроходность ветряка Z - соотношение скорости ветра и скорости движения конца лопасти ветроколеса. Для каждого ветроколеса есть ярко выраженный максимум энергоэффективности.
Для того чтобы получать максимально возможную мощность от ВЭУ при любых скоростях ветра, необходимо регулировать скорость вращения турбины так, чтобы она всегда соответствовала оптимальной скорости вращения при данной скорости ветра. Скорость вращения ветроколеса регулируется с помощью изменения выходного тока генератора.
Существует два типа алгоритмов отслеживания точки максимальной мощности (ТММ), а именно: алгоритмы, основанные на знании параметров и характеристик ветрогенератора (коэффициента использования энергии ветра Ср, быстроходности Z), и алгоритмы, которые позволяют выполнить поиск точек, соответствующих максимальной мощности, не зная характеристик ветрогенератора. В рамках этих алгоритмов существует три метода поиска ТММ: метод обеспечения работы ветрогенератора с постоянной оптимальной величиной быстроходности Z; метод на основе сигнала обратной связи и метод поиска экстремума. Все три метода описаны в [D. Rekioua. Wind Power Electric Systems. Modeling, Simulation and Control. Springer-Verlag London, 2014, P. 77-86].
В первом методе управления регулируется скорость вращения генератора в целях поддержания оптимального значения быстроходности Z, при котором мощность ветрогенератора является максимальной. Этот метод требует наличия датчиков скорости ветра для измерения скорости и частоты вращения ветрогенератора, а также знания оптимального значения Z ветроколеса для того, чтобы система могла извлечь максимально возможную мощность. Данный метод и устройство для его осуществления реализованы в соответствии с патентом US 4525633. В основе метода лежит выход на оптимальное соотношение частоты вращения и скорости ветра при помощи датчика скорости ветра и системы преобразования энергии ветровой установки.
Недостатком данной конструкции является необходимость применения датчика скорости ветра, который либо не обладает достаточной точностью, либо имеет высокую стоимость, при этом является дополнительным источником возможных неисправностей.
Во втором методе управления требуется знать максимальную мощность ветровой турбины и отслеживать эту мощность через его механизмы контроля. В патенте US 4695736 представлен метод управления и реализующая его структура ВЭУ. В основе метода лежит регулирование крутящего момента в соответствии с графиком, определяющим скорость генератора по отношению к измеренной генерируемой мощности, с целью повышения эффективности ветровой установки. Таким образом, если оптимальная частота вращения лежит ниже фактической, то частота, соответствующая мощности, будет ниже фактической и формируется задание по току (моменту) в сторону снижения частоты вращения. При оптимальной частоте выше фактической, мощность будет соответствовать большей частоте вращения, и ветродвигатель будет разгоняться.
Недостатком двух вышеописанных методов управления является то, что они основаны на знании оптимальной мощности и быстроходности ветрогенератора в зависимости от частоты вращения ветроколеса, которая обычно не известна с высокой степенью точности.
В третьем методе алгоритм управления непрерывно ищет ТММ ветрового колеса. Это позволяет преодолеть некоторые из общих проблем, которые обычно присущи двум другим методам. Принцип поиска точки максимальной мощности ВЭУ представлен на фиг. 2. При значении производной dP/dω=0 значение мощности находится в точке максимума. При значении производной dP/dω<0 точка на мощностной характеристике смещена вправо от точки максимума. Для возврата этой точки в ТММ необходимо уменьшить частоту вращения ротора генератора. При значении производной dP/dω>0 точка на мощностной характеристике смещена влево от точки максимума. Для возврата этой точки в ТММ необходимо увеличить частоту вращения ротора генератора.
В патенте US 8242620 описана структура ветроэнергетической установки, предусматривающая использование активного выпрямителя с возможностью регулирования частоты вращения в заданном диапазоне за счет формирования задания по току. Это позволяет стабилизировать частоту вращения и обеспечить эффективную работу ВЭУ при определенных скоростях ветра, соответствующих частоте вращения ветродвигателя.
Недостатком указанного технического решения является низкая эффективность работы ВЭУ в широком диапазоне ветровых режимов.
Наиболее близким является способ регулирования отбора мощности ветродвигателя, патент WO 2018/111128 А1 в котором управление ВЭУ осуществляется при помощи регулируемой системы отбора мощности ветродвигателя, состоящей из синхронного электрического генератора на постоянных магнитах, активного выпрямителя с микропроцессорным контроллером, блока питания, системы торможения, балластной нагрузки и понижающего преобразователя. Для данной структуры ВЭУ реализован способ регулирования, обеспечивающий повышение коэффициента преобразования энергии ветра во всем диапазоне рабочих скоростей и стабилизирующий электромагнитный момент на валу генератора при скорости ветра выше расчетной, соответствующей номинальному значению мощности. Способ регулирования основан на управлении частотой вращения ветродвигателя в соответствии с алгоритмом поиска оптимальной частоты вращения, который оценивает изменение вырабатываемой энергии на заданном интервале времени и производит задание нового значения частоты вращения.
Недостатком указанного технического решения является необходимость постоянного принудительного изменения скорости вращения ротора, сложность определения пика характеристики при постоянно изменяющейся скорости ветра, большее возмущение ветра приведет к более высокому значению амплитуды колебаний вокруг пиковой точки, что уменьшает быстродействие метода.
Задачей изобретения является повышение энергоэффективности ВЭУ путем настройки на ТММ и отслеживания нахождения текущей скорости вращения ветроколеса и генерируемой мощности в заданном диапазоне в окрестностях ТММ. При этом не замедляется искусственно скорость ветроколеса для нахождения ТММ. При выходе текущей точки скорости вращения ветроколеса и мощности за заданные пределы производится новая настройка на ТММ и задание новых пределов, в которых может находиться текущая точка мощности ветроколеса.
Поставленная задача решается тем, что в системе управления ветрогенератором, состоящей из ветроколеса, связанного механическим валом с ротором электрического генератора, соединенного с измерителем частоты вращения ротора и выпрямителем, который подключен к силовым входам первого, второго и третьего управляемых конвертеров, ключа, устройства управления, четырех датчиков напряжения и четырех датчиков тока, инвертора, нагрузки, аккумулятора и балластной нагрузки, при этом выход измерителя частоты вращения ротора связан с первым аналоговым входом устройства управления, выход первого управляемого конвертера через инвертор подключен к нагрузке, выход второго управляемого конвертера подключен к аккумулятору и через ключ к входу инвертора, выход третьего управляемого конвертера связан с балластной нагрузкой, первые, вторые, третьи и четвертые датчики напряжения и тока подключены соответственно к выходам выпрямителя, первого управляемого конвертера, к аккумулятору, к выходу третьего управляемого конвертера, выходы перечисленных датчиков напряжения и тока подключены к, соответственно, восьми аналоговым входам устройства управления, второй, третий и четвертый аналоговые выходы устройства управления связаны с управляющими входами соответственно первого, второго и третьего управляемых конверторов, дискретный выход устройства управления подключен к управляющему входу ключа, с целью повышения энергоэффективности дополнительно введен двухпороговый компаратор, измерительный вход которого связан с выходом измерителя частоты вращения ротора, управляющий вход подключен к первому аналоговому выходу устройства управления, а первый и второй выходы соединены с первым и вторым дискретными входами устройства управления.
Изобретение поясняется чертежами.
На фиг.1 изображена зависимость коэффициента использования ветра от быстроходности ветроколес разного типа.
На фиг.2 изображен принцип поиска точки максимальной мощности ВЭУ.
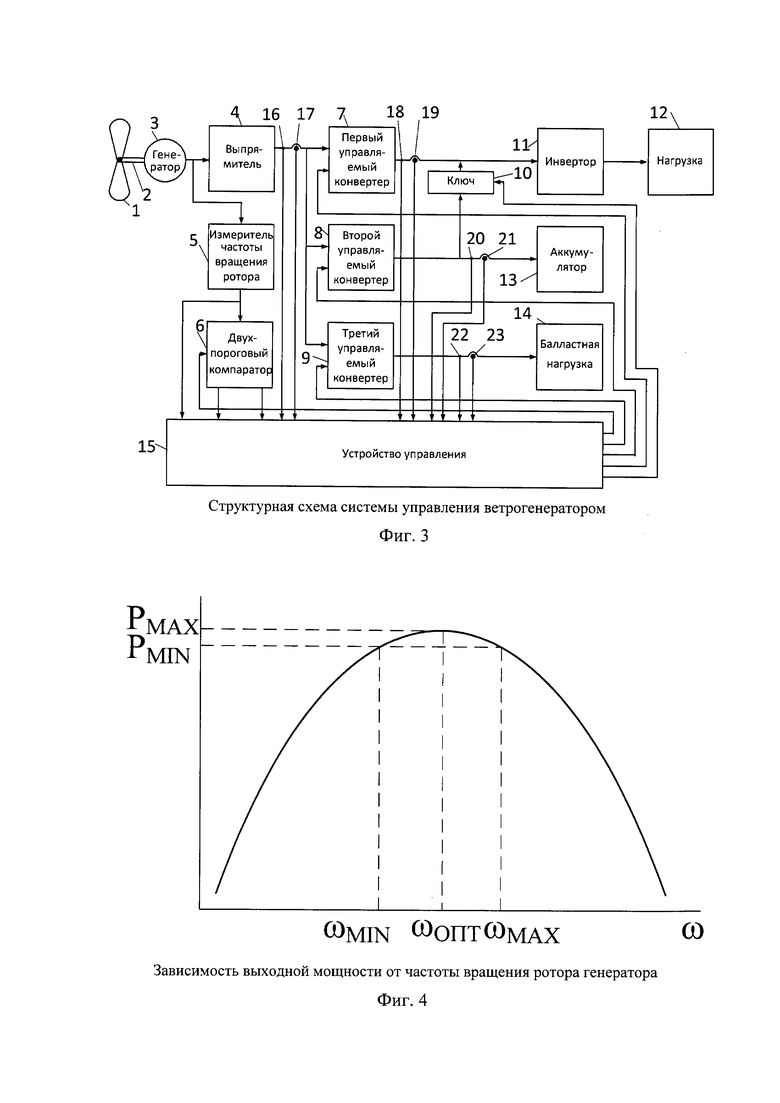
На фиг.3 изображена структурная схема системы управления ветрогенератором.
На фиг.4 изображена зависимость выходной мощности от частоты вращения ротора генератора.
Структурная схема системы управления ветрогенератором представлена на фиг. З. Ветроколесо 1 связано механическим валом 2 с ротором электрического генератора 3, подключенного к выпрямителю 4 и измерителю 5 частоты вращения ротора 5, к которому подключен двухпороговый компаратор 6. Сигнал с выпрямителя 4 поступает на силовые входы первого, второго и третьего управляемых конвертеров 7, 8 и 9 соответственно, которые осуществляют ШИМ-управление выходным током и напряжением в соответствии с сигналами, поступающими с аналоговых выходов устройства управления 15 на управляющие входы управляемых конвертеров 7, 8 и 9 соответственно. Первый управляемый конвертер 7 подключен через инвертор 11 к нагрузке 12. Второй управляемый конвертер 8 предназначен для управления зарядкой аккумулятора 13 и через ключ 10 может подключаться к входу инвертора 11 по сигналу от устройства управления 15. Третий управляемый конвертер 9 служит для регулирования тока балластной нагрузки 14. Первый, второй, четвертый датчики напряжения 16, 18, 22 соответственно, первый, второй, четвертый датчики тока 17, 19, 23 соответственно измеряют величины выходных напряжений и токов соответственно выпрямителя 4, первого и третьего управляемых конвертеров 7 и 9, третий датчик напряжения 20 и третий датчик тока 21 измеряют напряжение и ток заряда/разряда аккумулятора 13.
Система управления ветрогенератором может работать в трех режимах.
Первый режим - поиск ТММ. Этот режим предполагает изменение выходной мощности выпрямителя 4 с помощью трех управляемых конвертеров 7, 8 и 9 до тех пор, пока не будет достигнута ТММ. При этом определяется оптимальная частота вращения ротора ωОПТ, допустимый диапазон изменения скорости вращения ротора ωMIN≤ωОПТ≤ωMAX и диапазон изменения мощности в указанном диапазоне PMIN≤P≤PMAX. По сигналу от устройства управления 15 величина ωОПТ запоминается двухпороговым компаратором 6, при этом величины ωMIN и ωMAX определяются двухпороговым компаратором 6 автоматически. При определении ТММ устройство управления 15 высчитывает величины PMIN и PMAX.
На фиг. 4 показан оптимальный диапазон, в котором работает система управления, определяемый величинами PMIN, PMAX и ωMIN, ωMAX. Этот диапазон определяется в первом режиме.
Второй режим работы: выходная мощность выпрямителя больше номинальной мощности. При этом система управления 15 определяет нахождение частоты вращения ротора в диапазоне ωMIN≤ω≤ωMAX. При обеспечении этого условия устройство управления обеспечивает выходную мощность выпрямителя 4 в диапазоне PMIN≤P≤PMAX за счет управления первым, вторым и третьим управляемыми конвертерами 7, 8 и 9 соответственно, при этом РВЫПР=РНАГР+РАККУМ+РБАЛЛАСТ, где РВЫПР - выходная мощность выпрямителя 4, РНАГР - мощность, отдаваемая через инвертор 11 в нагрузку 12, РАККУМ - мощность, отдаваемая в аккумулятор 13, РБАЛЛАСТ - мощность, отдаваемая в балластную нагрузку 14. При изменении скорости ветра и, соответственно, выходе частоты вращения ротора за заданные пределы включается режим поиска ТММ.
Третий режим работы устройства включается при выходной мощности выпрямителя, меньшей номинальной мощности. В этом случае устройство управления 15 подает управляющий сигнал на ключ 10, при этом аккумулятор 13 подключается ко входу инвертора 11 параллельно с первым управляемым конвертером 7. В этом случае мощность, отдаваемая через инвертор в нагрузку, будет равна РВЫПР=РНАГР-РАККУМ. В остальном работа системы управления аналогична второму режиму.
Таким образом, предложенное техническое решение с дополнительным введением двухпорогового компаратора позволяет системе управления большую часть времени работать в заданном диапазоне изменения скоростей вращения ротора в зоне, близкой к точке максимальной мощности, не изменяя принудительно скорости вращения ротора, что обеспечит повышение энергоэффективности ветроэнергетической установки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления ветрогенератором | 2020 |
|
RU2750080C1 |
| Ветрогенератор | 2017 |
|
RU2674815C2 |
| Система управления ветрогенератором | 2021 |
|
RU2787630C1 |
| ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА С ОБОГРЕВАЕМЫМ ДИФФУЗОРНЫМ УСКОРИТЕЛЕМ | 2012 |
|
RU2499913C1 |
| Ветроэлектрическая установка с инерционным аккумулятором энергии | 1980 |
|
SU951626A1 |
| УСТРОЙСТВО БЕСПЕРЕБОЙНОГО ЭЛЕКТРОСНАБЖЕНИЯ ПОТРЕБИТЕЛЕЙ ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ СИСТЕМЫ, РАБОТАЮЩЕЙ НА НЕСТАБИЛЬНЫХ ИСТОЧНИКАХ ЭНЕРГИИ | 2006 |
|
RU2304836C1 |
| СИСТЕМА ДЛЯ АВТОНОМНОГО ЭЛЕКТРОСНАБЖЕНИЯ ПОТРЕБИТЕЛЕЙ | 2009 |
|
RU2382900C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ВЕТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2468251C1 |
| ВЕТРОЭЛЕКТРИЧЕСКАЯ УСТАНОВКА | 1996 |
|
RU2115020C1 |
| Стабилизированный вентильный аксиально-конический ветрогенератор постоянного тока | 2018 |
|
RU2688925C1 |
Изобретение относится к ветроэнергетике. Система управления ветрогенератом состоит из ветроколеса 1, связанного валом 2 с ротором электрического генератора 3, подключенного к выпрямителю 4 и измерителю 5 частоты вращения ротора, к которому подключен двухпороговый компаратор 6. Сигнал с выпрямителя 4 поступает на силовые входы управляемых конвертеров 7, 8 и 9, которые осуществляют ШИМ-управление выходным током и напряжением в соответствии с сигналами, поступающими с аналоговых выходов устройства управления 15 на входы конвертеров 7, 8 и 9. Конвертер 7 подключен через инвертор 11 к нагрузке 12. Конвертер 8 предназначен для управления зарядкой аккумулятора 13 и через ключ 10 подключается к входу инвертора 11 по сигналу от устройства 15. Конвертер 9 служит для регулирования тока балластной нагрузки 14. Датчики напряжения 16, 18, 22, датчики тока 17, 19, 23 измеряют величины выходных напряжений и токов соответственно выпрямителя 4, конвертеров 7 и 9. Датчик напряжения 20 и датчик тока 21 измеряют напряжение и ток заряда/разряда аккумулятора 13. Изобретение направлено на повышение энергоэффективности ветроэнергетической установки. 4 ил.
Система управления ветрогенератором, состоящая из ветроколеса, связанного механическим валом с ротором электрического генератора, соединенного с измерителем частоты вращения ротора и выпрямителем, который подключен к силовым входам первого, второго и третьего управляемых конвертеров, ключа, устройства управления, четырех датчиков напряжения и четырех датчиков тока, инвертора, нагрузки, аккумулятора и балластной нагрузки, при этом выход измерителя вращения ротора связан с первым аналоговым входом устройства управления, выход первого управляемого конвертера через инвертор подключен к нагрузке, выход второго управляемого конвертера подключен к аккумулятору и через ключ к входу инвертора, выход третьего управляемого конвертера связан с балластной нагрузкой, первые, вторые, третьи и четвертые датчики напряжения и тока подключены соответственно к выходам выпрямителя, первого управляемого конвертера, к аккумулятору, к выходу третьего управляемого конвертера, выходы перечисленных датчиков напряжения и тока подключены к, соответственно, восьми аналоговым входам устройства управления, второй, третий и четвертый аналоговые выходы устройства управления связаны с управляющими входами соответственно первого, второго и третьего управляемых конверторов, дискретный выход устройства управления подключен к управляющему входу ключа, отличающаяся тем, что дополнительно введен двухпороговый компаратор, измерительный вход которого связан с выходом измерителя частоты вращения ротора, управляющий вход подключен к первому аналоговому выходу устройства управления, а первый и второй выходы соединены с первым и вторым дискретными входами устройства управления.
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| US 8242620 B2, 14.08.2012 | |||
| US 7456510 B2, 25.11.2008 | |||
| Ветрогенератор | 2017 |
|
RU2674815C2 |
| Ветроэлектрический агрегат, способ управления ветроэлектрическим агрегатом и устройство для его осуществления | 1985 |
|
SU1492078A1 |

