Область техники, к которой относится изобретение
Изобретение относится к области беспроводных оптических каналов и может быть использовано для проектирования систем двусторонней связи между стационарными и подвижными объектами.
Задача изобретения состоит в создании устойчивых и надежных высокоскоростных систем передачи информации, адаптированных к условиям эксплуатации на железнодорожном транспорте, соединяющих мобильные устройства пассажиров, машиниста и членов поездной бригады подвижного состава с коммутаторами сетей оперативно-технологической, сотовой, спутниковой связи и др.
Уровень техники
Известны варианты систем передачи данных на подвижные объекты (поезда) с помощью устройств беспроводной оптической связи, рассмотренные в литературе:
1) M. Sivaranjani, Dr. J. Vidhya "System Performance of Free Space Optics in Underground Moving Train Using Optisystem 14"; "Asian Journal of Applied Science and Technology (AJAST)" 2017;
2) R. Paudel, Z. Ghassemlooy, H. Li. Minh, S.Rajbhanderi; "Modelling of free space optical link for ground-to-train communications using a Gaussian source." "The Institution of Engineering and Technology" 2013;
3) R. Paudel, H. Le-Minh, Z. Ghassemlooy, M. Ijaz and S. Rajbhandari "High speed train communications system using free space optics"; "Optical Communications Research Group, NCRLab, Northumbria University" 2017;
4) RU 2 281 610, C1, кл. H04B 10/10, опубл. 10.08.2006 г. " Устройство передачи данных через открытый оптический атмосферный канал связи";
5) RU 2 451 397, С2, кл. Н04В 10/10, опубл. 10.08.2011; " Устройство системы оптической связи с автоматическим сопровождением светового луча на приемнике информации";
6) RU 2 155 450, С1, кл. Н04В 10/12, опубл. 27.08.2000; "Устройство двухсторонней оптической связи";
7) RU 57 995, U1, кл. Н04В 17/00. опубл. 27.10.2006; "Система беспроводной оптической связи";
8) RU 2 225 024, С1, кл. G02B 27/64 опубл. 27.02.2004. " Система стабилизации изображения на подвижном основании".
Для организации двусторонней связи предусматриваются устройства беспроводной двусторонней оптической связи (БОС) двух типов: стационарные (СУБОС) и подвижные (ПУБОС). Стационарные устанавливаются на опорах контактной сети на расстоянии друг от друга таким образом, чтобы диаграмма направленности оптического пучка охватывала участок, равный максимально возможной длине поезда. Подвижные устройства устанавливаются на крышах вагонов таким образом, чтобы минимизировать действие аэродинамического «ветра», а именно, в середине вагона. Количество подвижных ПУБОС зависит от типа вагона и длины поезда. Все подвижные ПУБОС объединяются с помощью коммутатора, который выбирает и подключает к каналу БОС одну из них с помощью микропроцессора по алгоритму детектора максимального значения.
Для повышения надежности канала БОС предусмотрено резервирование с помощью радиостанций на случай резкого ухудшения условий распространения оптического сигнала, устанавливаемых на опорах контактной сети и локомотиве поезда, и работающих в свободном частотном диапазоне (2,4ГГц).
Изобретение относится к области беспроводной оптической связи БОС и может быть применено при проектировании устройств передачи данных по информационным сетям с подвижными объектами. Необходимость использования БОС обусловлено потребностью в повышении пропускной способности каналов связи и огромными преимуществами перед другими видами связи, а именно:
1) возможность использования диапазона частот, не требующего лицензирования;
2) нечувствительность БОС к электромагнитным помехам;
3) отсутствие электромагнитных помех от БОС для других средств связи;
4) высокая скорость передачи данных;
5) высокий уровень безопасности передачи информации;
6) простота монтажа, демонтажа и небольшие габариты оборудования;
7) возможность инсталляция связи без использования дополнительной инфраструктуры.
Однако имеются и недостатки:
1) зависимость от погодных условий;
2) ограниченная дальность связи;
3) необходимость прочного крепления оборудования;
4) относительная дороговизна оборудования.
Известны варианты систем передачи данных на подвижные объекты (поезда) с помощью устройств беспроводной оптической связи, рассмотренные в литературе: [1-8]
В них рассмотрены общие схемы организации связи между стационарным пунктом и движущимся поездом и приведены зависимости уровней сигнала и вероятности ошибки от расстояния, полученные экспериментальным путем и с помощью математического моделирования. В работах [1, 2] сделаны выводы: 1) непрерывный канал оптической связи сохраняется при вибрациях во время движения поезда; 2) в условиях железнодорожного транспорта можно организовать высокоскоростную передачу данных по каналам БОС. Недостатком материала, изложенного в [1, 2], является отсутствие схемы включения каналов БОС в общую сеть связи железнодорожного транспорта и других конструктивных особенностей приемопередающей аппаратуры, учитывающих специфику связи в условиях движущегося поезда.
В каждом из источников [3-8] рассматриваются отдельные устройства, повышающие качество беспроводной оптической связи: 1) борьбы с возмущениями положения светового пучка из-за изменений атмосферных условий или вибраций с помощью системы автоматической подстройки (коррекции) оптической оси [3]; 2) устранения вибраций для стационарного СУБОС и подвижного ПУБОС при движении поезда [4]; 3) автоматической регулировки усиления приемника при изменениях уровня оптического сигнала во время движения поезда [5]; 4) резервирования канала БОС с помощью радиостанций [6]; 5) регулирования мощности лазеров и глубины амплитудной модуляции в зависимости от погодных условий [7]; 6) стабилизации изображения при движении объекта [8]. Общим недостатком работ [3-8] является отсутствие комплексных мер по обеспечению работоспособности БОС при движении поезда, которые требуются для адаптации БОС к условиям эксплуатации на железнодорожном транспорте.
Наиболее близким по технической сущности является устройство двусторонней беспроводной оптической связи [7], содержащее два приемопередающих узла, каждый из которых имеет передатчик с оптической системой в виде коллимирующей оптики с автоматической компенсацией возмущений положения светового пучка, лазером с регулируемым источником питания; фотоприемник с оптической системой в виде собирающих и фокусирующих линз, а также поворотных зеркал для устранения солнечной засветки, схему обработки, регулирования и формирования импульсов управления мощностью лазеров и глубиной модуляции для адаптивного отслеживания условий распространения сигнала в атмосфере. Главный недостаток прототипа - невозможность использования устройства для железнодорожного транспорта без дополнительных систем, обеспечивающих работоспособность приемопередающих устройств при движении поезда.
Раскрытие изобретения
Принципиальным отличием заявляемого изобретения от прототипа является следующее. При движении поезда уровень сигнала в приемопередатчиках устройств беспроводной оптической связи (УБОС), будет меняться по мере удаления подвижного ПУБОС от одного стационарного устройства СУБОС и приближения к другому СУБОС. Следовательно, в приемниках УБОС необходимо устройство автоматической регулировки усиления АРУ для стабилизации амплитуды электрического импульса на выходе фотоприемника в определенном рабочем диапазоне значений. Кроме того, длина поезда и кривизна пути может привести к потери «прямой видимости» в канале БОС, что требует установки на поезде нескольких ПУБОС, количество которых зависит от типа вагонов (габаритов и установленного оборудования на крыше), а также наличия сети Wi-Fi и длины поезда. Следовательно, для создания беспроводной оптической связи на железнодорожном транспорте канал БОС должен состоять как минимум из одного стационарного СУБОС на опоре контактной сети и нескольких ПУБОС в движущемся поезде, которые по очереди подключаются к каналу БОС с помощью коммутатора после измерения и сравнения уровней сигнала по принципу детектора максимального значения. В прототипе рассматривается вариант соединения «точка-точка» и предусматривается наличие двух приемопередатчиков без системы АРУ в приемниках.
Сущность изобретения заключается в следующем.
Задача изобретения состоит в создании устойчивых и надежных высокоскоростных каналов связи, адаптированных к условиям эксплуатации на железнодорожном транспорте, и соединяющих мобильные устройства пассажиров, машиниста и членов поездной бригады подвижного состава с коммутаторами сетей оперативно-технологической, мобильной, спутниковой связи с помощью волоконно-оптической системы передачи информации (ВОСП).
Техническая реализация изобретения возможна за счет применения комплексных мер, учитывающих не только общеизвестные факторы, ухудшающие качество оптической связи: перекрытие «прямой видимости», солнечная засветка, атмосферное поглощение, сцинтилляция, движение «опоры» и т.д., но и специфику эксплуатации устройств беспроводной оптической связи в условиях железнодорожного транспорта. К этим условиям относятся: изменение уровня сигнала при движении поезда, вибрация, дополнительные источники света от прожекторов матч освещения, встречных поездов, сигналов семафоров, электромагнитные помехи от контактной сети в линиях связи, аэродинамический «ветер» от движущегося поезда и т.д.
Технический результат заявляемого изобретения достигается в результате того, что максимально используется существующая инфраструктура, а именно: проложенные вдоль железнодорожного полотна волоконно-оптические линии связи (ВОЛС) и опоры контактной сети, высота которых соответствует изменениям рельефа местности. Установка стационарных СУБОС на опорах под углом, учитывающим направление «восток-запад», на уровне высоты подвижного состава обеспечит минимальную длину траектории луча и максимальное отношение сигнал/шум для ПУБОС, установленных на крышах вагонов. Стационарные СУБОС соединяются при помощи электрического кабеля (витой пары) длиной порядка 100 л/ через маршрутизаторы и мультиплексоры (MUX) волоконно-оптической системы передачи. Имеются варианты УБОС, позволяющие использовать вместо витой пары оптическое волокно [9]. Отсюда, можно создать широкополосный канал связи с подвижными объектами с использованием беспроводного оптического канала, протяженность которого зависит от мощности лазеров, удаленности места установки СУБОС от MUX и расстояния между станциями, оснащенными мультиплексорами ВОСП. С увеличением мощности лазера можно построить систему связи, позволяющую пассажирам поезда с помощью сети Wi-Fi и БОС выйти на коммутаторы сети мобильной или спутниковой связи. Для повышения надежности связи дополнительно предусмотрена установка радиостанций на опорах контактной сети и крыше локомотива, работающих в свободном диапазоне 2,4 ГГц, которые также связаны через маршрутизаторы (на опорах контактной сети) с системой ВОСП. Для реализации двусторонней связи предлагается использовать две несущие длины волн: от стационарной СУБОС к подвижной - λ1, в обратном направлении - λ2. Это позволит уменьшить объем оборудования на крышах вагонов.
Таким образом, система двусторонней беспроводной оптической связи, состоящая из нескольких приемопередающий узлов, содержащих приемопередающие интерфейсы, приемопередающие оптические системы с автоматическим регулированием оптической оси, лазер с управляемым источником питания для регулирования мощности оптического сигнала и глубины амплитудной модуляции, фотоприемник, имеет следующие особенности:
1) приемопередающие узлы подразделяются по месту расположения на стационарные, устанавливаемые на опорах контактной сети, и подвижные, устанавливаемые на крышах вагонов подвижного состава, подключаемые к каналу беспроводной оптической связи через коммутатор сети поезда согласно алгоритма детектора максимального значения;
2) приемники приемопередающих узлов оснащены автоматической регулировкой усиления для стабилизации амплитуды электрического импульса из-за изменения уровня оптического сигнала при движении подвижного состава;
3) для повышения надежности связи предусматривается установка радиостанций на опорах контактной сети и крыше локомотива.
Проведенный заявителем анализ уровня техники позволил установить, что заявителем не обнаружен аналог, характеризующийся признаками, идентичными всем существенным признакам заявляемого изобретения, а определение прототипа из перечня выявленных аналогов, как наиболее близкого по совокупности признаков аналога, позволило выявить совокупность существенных отличительных признаков, изложенных в формуле изобретения.
Следовательно, заявляемое изобретение соответствует требованию «новизны» по действующему законодательству.
Для проверки соответствия заявляемого изобретения требованию изобретательского уровня заявитель провел дополнительный поиск известных решений, результаты которого показывают, что заявляемое изобретение не следует из известного уровня техники, поскольку не выявлено устройство системы двусторонней оптической связи, полностью адаптированное к условиям эксплуатации на железнодорожном транспорте.
Следовательно, заявляемое изобретение соответствует требованию «Изобретательский уровень» по действующему законодательству.
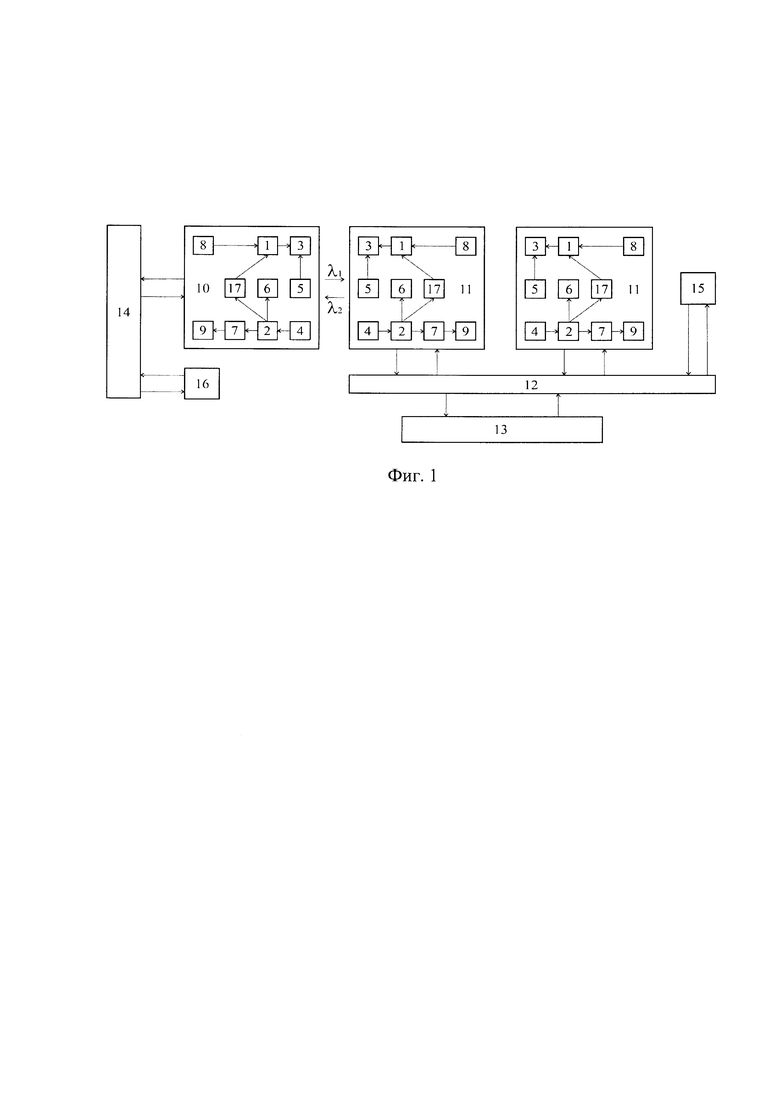
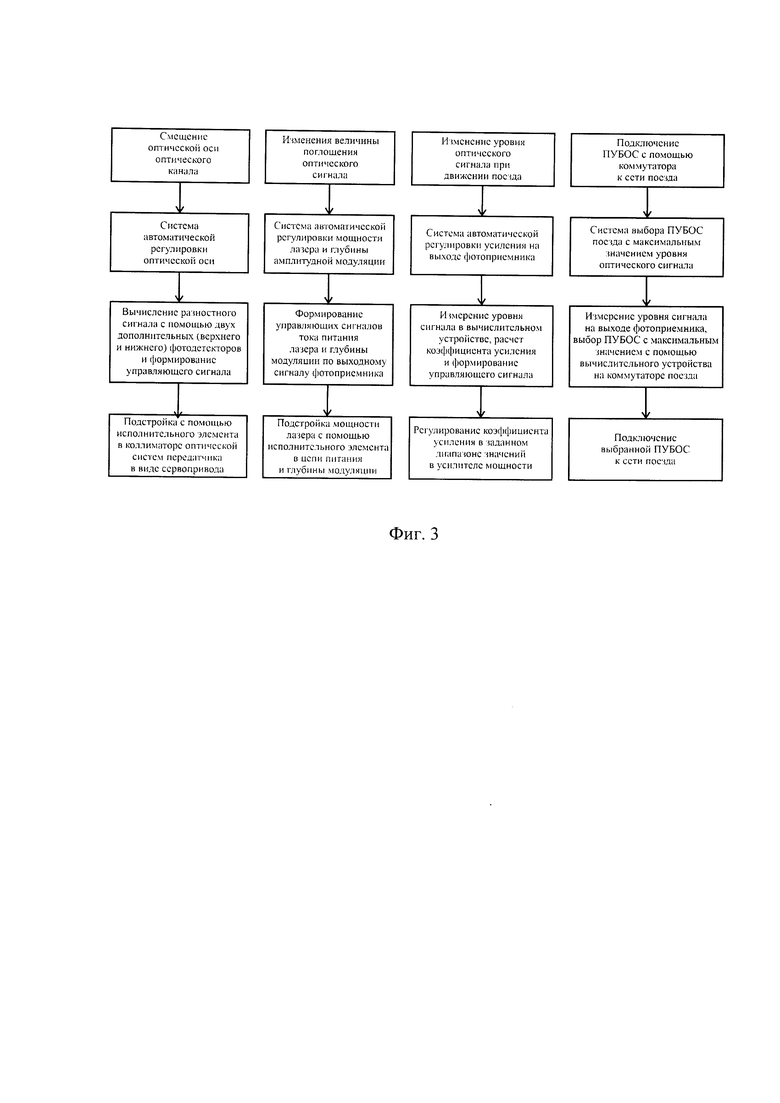
Система работает следующим образом. Излучение лазера 1 с длиной волны λ1 через коллиматорную систему 3 поступает от стационарного приемопередающего узла 10 на подвижные приемопередающие узлы 11 на крышах вагонов подвижного состава через оптическую систему 4 на фотоприемники 2 (Фиг. 1). Сигнал с выхода фотоприемника 2 поступает на устройство измерения мощности оптического сигнала 6. Результаты измерений от всех блоков 6 приемопередающих узлов 11 передаются в коммутатор 12, который с помощью микропроцессора осуществляет сравнение, выбор и подключение к каналу оптической связи приемопередающего узла 11, имеющего максимальное значение сигнала. Подключенный узел 11 остается в рабочем состоянии пока уровень мощности сигнала не упадет за допустимую границу (Фиг. 2). Это происходит при удалении приемопередающего узла 11 от стационарного узла 10. Далее к каналу подключается следующий приемопередающий узел 11, ближе всего находящийся к стационарному узлу 10. Ввиду того, что при движении поезда нельзя обеспечить постоянную амплитуду импульса на выходе фотоприемника 2, то предусмотрена система автоматической регулировки усиления 7. Далее через интерфейс приемника 9 сигнал поступает через коммутатор 12 на контроллер 13 сети Wi-Fi поезда. В обратном направлении информация поступает через блоки 13 и 12 и интерфейс передатчика 8 на модулятор, где главным элементом является лазер 1 с длиной волны λ2 и регулируемым источником питания, затем на оптическую систему 3, состоящую из коллиматорной оптики и системы автоматической подстройки оптической оси. Излучение лазера с длиной волны λ2 поступает в фотоприемник 2 приемопередающего узла 10 через оптическую систему приемника 4, состоящую из оптического концентратора и полосового фильтра, далее - на интерфейс приемника 9 и маршрутизатор 14 сети ВОСП. Для резервирования оптического канала используется радиоканал, построенный с помощью стационарной 16 и локомотивной 15 радиостанций. При ухудшении условий распространения сигнала из-за повышения затухания в атмосфере предусмотрена система регулирования мощности лазеров и величины амплитуды импульсов 17 в приемнике узла 10 и приемнике активного узла 11. В блоке 17 осуществляются: 1) оценка уровня входного сигнала, расчеты величины среднего значения тока питания лазера и величины амплитуды импульса с помощью микроконтроллера; 2) формирование управляющих сигналов для регулировки мощности лазеров 1 в передатчиках узлов 10 и 11 через исполнительный элемент в источнике питания (Фиг. 3). Блок 17 включается в случае, если измеренный уровень сигнала в блоке 6 вышел за границы допустимых значений (Фиг. 2). Устойчивое и надежное функционирование беспроводного оптического канала связи обеспечивают следующие системы, связывающие стационарный узел и подвижные узлы УБОС:
1. Система автоматического регулирования оптической оси (АПОО) 3, исполнительным элементом в которой является сервопривод для изменения углового положения коллиматора. Смещение луча лазера происходит после прохождения пучка света по трассе (между узлами 10 и 11), который фиксируется верхним и нижним фотодетекторами. Разностный сигнал фотодетекторов корректирует угловое положение коллиматора СУБОС и ПУБОС.
2. Система автоматической регулировки усиления АРУ 7 в приемнике сигналов.
3. Система автоматического подключения с помощью блока 12 приемопередающего узла 11.
4. Система автоматического регулирования мощности лазера и глубины модуляции с помощью блока 17 (АРМЛ).
Устройство системы двусторонней оптической беспроводной связи функционирует без ошибок, если выполняются перечисленные ниже условия.
1. Время прохождения сигнала в системе автоматической подстройки оптической оси (АПОО) между узлами 10 и 11, а также время срабатывания (быстродействие) исполнительного элемента в петле обратной связи блока 3 (сервопривода) должно быть меньше длительности элементарного импульса. Время на преодоление сигналом расстояния 25 м (учитывающее высоту опоры контактной сети) со скоростью света между узлами 10 и 11 в петле обратной связи составит 162 нс. При скорости передачи двухпозиционных сигналов (информации) 1Гбит/с длительность элементарного импульса равна 1 нс. С учетом инерционности исполнительного элемента можно сделать вывод: во время подстройки системы 3 возможны искажения элементарных импульсов в информационном пакете.
2. Время срабатывания (быстродействие) элементов, входящих в систему автоматической регулировки усиления в приемнике УБОС, должно быть значительно меньше длительности элементарного импульса (1нс). Время срабатывания элементов в петле АРУ, реализованных с помощью наноэлектроники, не превысит 10 пс [10], что позволит обеспечить своевременную подстройку уровня сигнала в приемнике.
3. Время переключения с одного подвижного ПУБОС на другое, зависящее от быстродействия исполнительных элементов и тактовой частоты микропроцессора 12, должно быть: 1) значительно меньше времени активной работы подвижного ПУБОС; 2) меньше длительности элементарного импульса. Если поезд движется со скоростью 120 км/ч (33,3 м/с), то предполагаемое расстояние 25 м (между узлами связи 11 на крыше вагона) поезд пройдет за 0,75 с. Это значит, что каждые 0,75 с потребуется переключать узлы 11 в движущемся поезде. Тактовая частота современных микропроцессоров имеет порядок 4ГГц (может быть и выше), что соответствует длительности переключения 0,25 нс. Поэтому временные затраты на переключения блоков 11 соответствуют первому и второму условиям.
4. Время срабатывания устройств, входящих в петлю обратной связи регулирования мощности лазера, состоящего из времени прохождения оптического сигнала между узлами 11 и 10 и обратно, а также времени работы устройств 17 и исполнительного элемента в источнике питания лазера, должно быть меньше длительности элементарного импульса (1нс). Время на преодоление сигналом расстояния 25 м (между СУБОС и ПУБОС) со скоростью света в петле обратной связи составит 162 нс (см. пункт 1). Поэтому искажения элементарных импульсов в информационном пакете неизбежны во время подстроек системы при скорости передачи информации 1Гб/с и выше.
Таким образом, для оценки работоспособности заявляемого устройства нужно определить эффективность систем АПОО и АРМЛ с помощью вероятностей ошибки Рош и потерь информационного пакета Рпотерипакета при совпадении времени передачи пакета с процессом подстройки оптической оси или мощности лазера.
Вероятности можно подсчитать с помощью математических ожиданий длительностей подстройки системы M[tподстройки] и отсутствия ее M[tотсутствиеподстройки] по причине турбулентности следующим образом [11]:


где M[tподстройки]+M[tотсутствиеподстройки]=M[Tпериод] - длительность периода турбулентности;
Рподстройки - вероятность наличия периода подстройки системы;
Рпакета - вероятность передачи информационного пакета;
tпакет, - длительность информационного пакета;
tпаузы - длительность паузы между пакетами;
tподстройки - длительность периода подстройки системы;
tотсутствиеподстройки - длительность периода отсутствия подстройки.
Длительность периода подстройки системы АРМЛ состоит из времени прохождения луча от подвижного ПУБОС к стационарному и обратно, а также времени работы функциональных блоков 4, 2, 17, 1, 3 в узлах 10 и 11.
С учетом быстродействия современной элементной базы электроники (время срабатывания порядка 10 пс) и количества функциональных блоков, период процесса подстройки может длиться порядка 167 нс.
Для расчетов вероятностей потерь и ошибки требуется статистика метеорологических изменений. Известно, например, что периоды турбулентности в атмосфере делятся на медленные и быстрые. [12]
Так, для быстрой турбулентности с периодом наступления \мс и медленной с периодом 10 с вероятности по формуле (2) соответственно будут равна:


Наиболее опасны частые изменения турбулентности. Вероятность ошибки разряда (элементарного импульса) можно определить по формуле [13]:

где Ран - аномальная ошибка, что означает ошибка хотя бы в одном разряде пакета (Рпотеряпакета), n - число разрядов.
Учитывая, что при передаче информации основное время занимают полезные сигналы (разряды пакетов), паузы между ними составляют меньше 10% от длительности пакета [14], то вероятность передачи пакета во время сеанса связи равна 0,88. Отсюда, вероятность потери пакета (1) имеет порядок 1,5⋅10-4 для частых и 1,5⋅10-8 для редких турбулентностей. Для гиперкадра, состоящего из нескольких сот бит, вероятность ошибки равна (6):
Рош=(1,5⋅10-4/103)=1,5⋅10-7 (для быстрой турбулентности);
Рош=(1,5⋅10-8/103)=1,5⋅10-11 (для медленной турбулентности). Эти цифры характеризуют работу системы АРМЛ.
Для системы АПОО время подстройки может занять величину на порядок большую, чем в системе АРМЛ из-за большей инерционности исполнительного элемента (сервопривода). Однако период подстройки оптической оси (частота подстроек оптической оси), который включает (помимо длительности работы АПОО) временные промежутки, когда не происходят подстройки системы, может быть значительно большим, чем периодичность турбулентности. Поэтому вероятность совпадения процесса подстройки оптической оси и передачи информационных пакетов может оказаться меньше, чем для случая медленной турбулентности (Pперестройки=1,67⋅10-8 (5)).
Полученные результаты (значения вероятностей ошибки) свидетельствуют о том, что современный уровень техники позволяет реализовать системы двусторонней оптической беспроводной связи с движущимся поездом.
Краткое описание чертежей
На Фиг. 1 приведена блок-схема системы двусторонней беспроводной оптической связи с движущимся поездом.
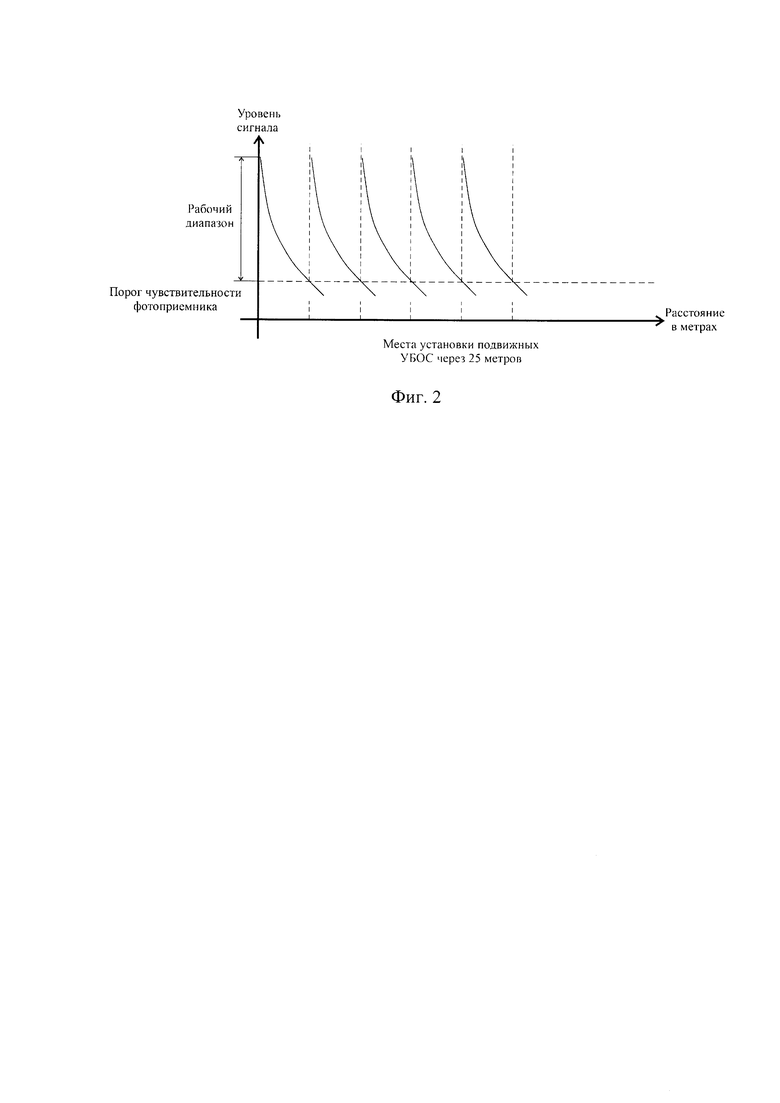
На Фиг. 2 изображены графики зависимости уровня сигнала от расстояния в приемниках УБОС при движении поезда.
На Фиг. 3 представлена функциональная схема узлов УБОС, обеспечивающих работоспособность канала беспроводной оптической связи с движущимся поездом.
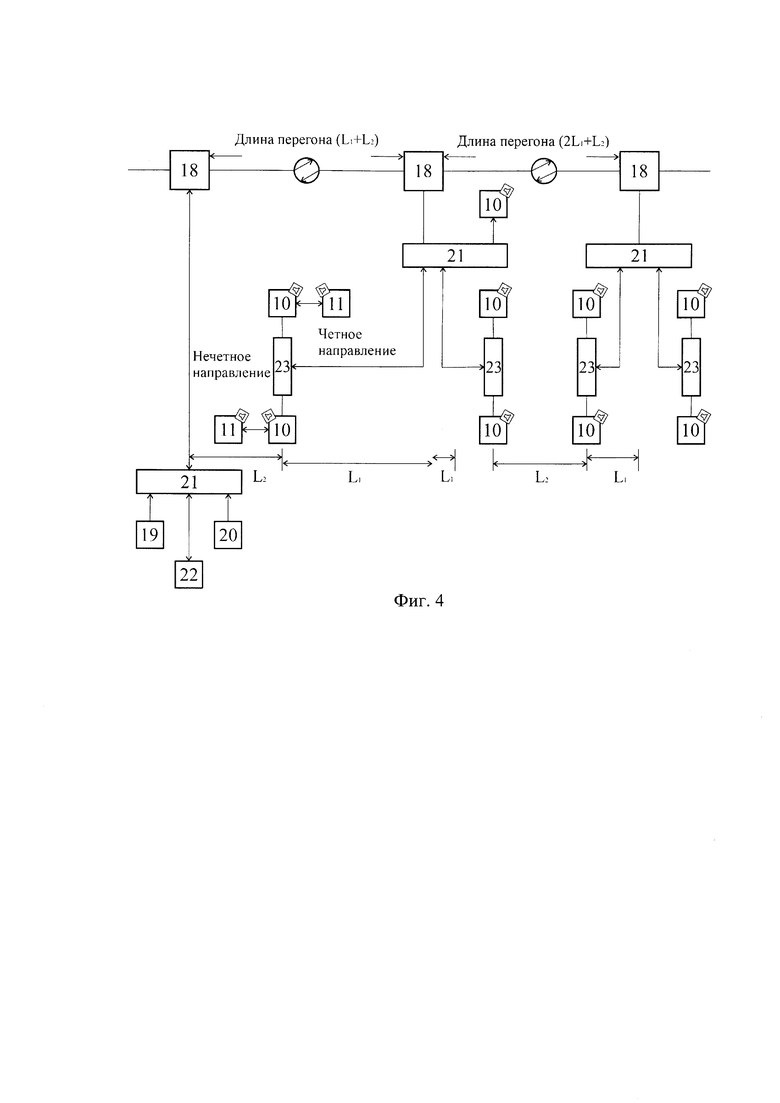
На Фиг. 4 показана структурная схема организации сети связи с поездом с использованием каналов БОС.
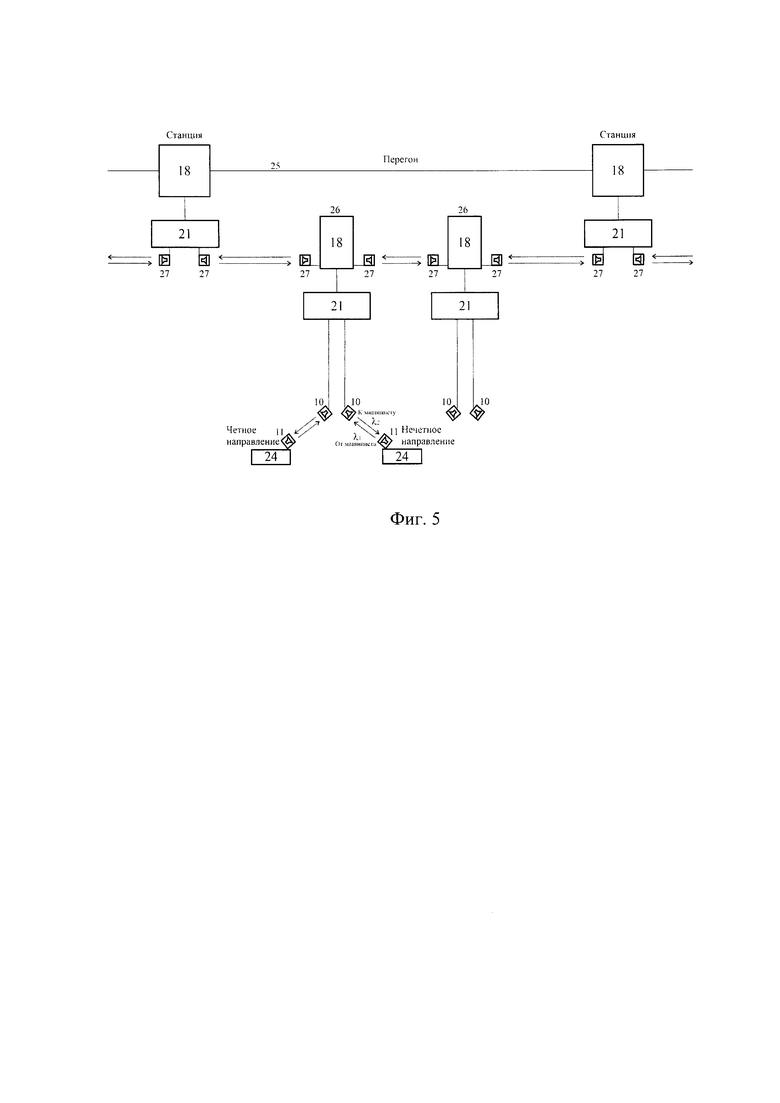
На Фиг. 5 показана структурная схема организации двухуровневой сети с использованием каналов БОС для поездной связи.
Осуществление изобретения
На Фиг. 1 изображена система двухстороннего канала беспроводной оптической связи, состоящее из:
1 - лазер (модулятор) с длиной волны λ1, или λ2 и управляемым источником питания;
2 - демодулятор (фотоприемник);
3 - оптическая система передатчика (коллимирующая оптика с регулировкой оптической оси);
4 - оптическая система приемника (оптические концентратор и полосовой фильтр);
5 - вычислитель разностного сигнала для корректировки оптической оси;
6 - устройство измерения уровня оптического сигнала;
7 - автоматическая регулировка усиления приемника;
8 - интерфейс передатчика;
9 - интерфейс приемника;
10 - стационарный приемопередатчик СУБОС;
11 - подвижный приемопередатчик ПУБОС;
12 - коммутатор с функциями оценки уровней сигналов и сравнения их согласно алгоритму детектора максимального значения;
13 - контроллер сети Wi-Fi поезда;
14 - маршрутизатор сети ВОСП;
15 - подвижная радиостанция;
16 - стационарная радиостанция (резервный канал связи);
17 - устройство формирования сигналов управления глубиной модуляции.
На Фиг. 2 изображены зависимости уровней сигнала от расстояния между УБОС на входе фотоприемников 2 и приемопередающих узлов ПУБОС 11, установленных на крышах вагонов, при движении поезда в моменты прохождения ПУБОС мимо опоры контактной сети (СУБОС).
На Фиг. 3 представлена функциональная схема узлов УБОС, обеспечивающих работоспособность канала беспроводной оптической связи на железнодорожном транспорте.
На Фиг. 4 показана структурная схема сети связи стационарных объектов с поездом:
18 - MUX;
19 - видеокамера;
20 - тепловизор;
21 - маршрутизатор
22 - пульт поездного диспетчера;
23 - разветвитель на опоре контактной сети.
Связь организована с помощью оборудования ВОСП для участков с длиной перегонов не более (2L1+L2), где L - протяженность однопролетного канала БОС, рассчитанная с учетом расположения СУБОС на опоре контактной сети, максимальное удаление которой от MUX ограничивается возможностями «витой пары» и дополнительного усилителя (не менее 100 м). Длина перегона с помощью электрического кабеля и разветвителей на опорах контактной сети делится на три участка, с разной длиной L. Стационарный СУБОС устанавливается на опоре контактной сети на максимальном расстоянии от мультиплексора ВОСП на станции, и может с помощью оптического канала БОС передавать и принимать высокоскоростные сигналы, связывая между собой, например, машиниста, диспетчера и др. При этом длина оптического однопролетного канала L выбирается в зависимости от мощности лазера и заданной дальности связи (от 100 м и более). Так, на одной опоре рядом с MUX может быть установлен СУБОС с дальностью канала БОС L1, на другой опоре - протяженностью L2, при этом (L2, φ L1,). На опорах контактной сети могут устанавливаться по паре СУБОС с направленными (фокусированными) пучками света в противоположных направлениях (четное и нечетное направления движения поездов), которые работают на одной длине волны, не создавая помех друг другу.
На Фиг. 5 показана структурная схема двухуровневой сети с двухсторонним беспроводным оптическим каналом связи с поездом для случая, когда длина перегонов более (2L1,+L2):
24 - подвижной состав;
25 - ВОЛС;
26 - опора контактной сети;
27 - УБОС для организации нижнего уровня сети.
Для решения задачи построения беспроводной оптической связи на перегонах большой протяженности (свыше 5 км), превышающей возможности БОС, предлагается создание нижнего уровня сети, состоящей из УБОС (27) и MUX (18), разделяющих информационные потоки в разных направлениях, и работающих по принципу радиорелейной линии. Причем для организации дуплексной связи с поездом целесообразно использовать оборудование с двумя длинами волн λ1 и λ2, в противном случае нужно устанавливать по два комплекта УБОС. Рабочие длины волн выбираются, исходя из условий безопасности для пассажиров поезда в диапазоне выше 800 нм в окнах прозрачности инфракрасного диапазона [11].
Литература
1. M. Sivaranjani, Dr. J. Vidhya "System Performance of Free Space Optics in Underground Moving Train Using Optisystem 14"; "Asian Journal of Applied Science and Technology (AJAST)" 2017;
2. R. Paudel, Z. Ghassemlooy, H. Li. Minh, S.Rajbhanderi; "Modelling of free space optical link for ground-to-train communications using a Gaussian source." "The Institution of Engineering and Technology" 2013;
3. R. Paudel, H. Le-Minh, Z. Ghassemlooy, M. Ijaz and S. Rajbhandari "High speed train communications system using free space optics"; "Optical Communications Research Group, NCRLab, Northumbria University" 2017;
4. RU 2 281 610, C1, кл. H04B 10/10, опубл. 10.08.2006;
5. RU2 451 397, C2, кл. H04B 10/10, опубл. 10.08.2011;
6. RU 2 155 450, C1, кл. H04B 10/12, опубл. 27.08.2000;
7. RU 57 995, U1, кл. H04B 17/00. опубл. 27.10.2006;
8. RU 2 225 024, C1, кл. G02B 27/64 опубл. 27.02.2004.
9. AO «Мостком» [Электронный ресурс]. - Режим доступа: http://www.moctkom.ru/ru/терминалы-для-мобильных-объектов/, свободный - (20.08.2020.)
10. Дж. М. Мартинес-Дуарт и др. Нанотехнологии для микро- и оптоэлектроники. М.: Техносфера, 2007.-368 с;
11. Н.М. Сидякин. Элементы теории случайных импульсных потоков. М.: Сов. Радио, 1965. - 263 с;
12. Российская библиотека научных журналов и статей (РАН) [Электронный ресурс]. - Режим доступа: https://cvberleninka.ru/article/n/veroyatnostnoe-opisanie-turbulentnyh-protsessov-v-atmosfere/viewer, свободный - (20.08.2020.)
13. Г.В. Горелов, А.Ф. Фомин и др. Теория передачи сигналов, М. Транспорт, 2001. - 415 с;
14. Ю.А. Громаков. Стандарты и системы подвижной радиосвязи. М.: Эко-Трендз, 2000. - 239 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система мониторинга подвижного состава и инфраструктуры железнодорожного транспорта на основе беспроводных технологий | 2022 |
|
RU2794600C1 |
| Система двустороннего беспроводного оптического канала связи с беспилотным летательным аппаратом | 2024 |
|
RU2841515C1 |
| Система и способ дистанционного контроля и регистрации технологических операций на транспорте | 2020 |
|
RU2744500C1 |
| Система определения скорости локомотива и направления движения | 2023 |
|
RU2808860C1 |
| СИГНАЛЬНОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И ОПОВЕЩЕНИЯ О ПРИБЛИЖЕНИИ ПОДВИЖНОГО СОСТАВА | 2024 |
|
RU2834653C1 |
| СПОСОБ И СИСТЕМА АВТОМАТИЧЕСКОГО КОНТРОЛЯ КОНТАКТНОГО ПРОВОДА ЭЛЕКТРОТРАНСПОРТА | 2017 |
|
RU2750823C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА МОНИТОРИНГА ПЕРЕВОЗОК ГРУЗОВ ЖЕЛЕЗНОДОРОЖНЫМ ТРАНСПОРТОМ | 2010 |
|
RU2466460C2 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ ИДЕНТИФИКАЦИИ БОРТОВОГО НОМЕРА ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА | 2012 |
|
RU2494904C1 |
| СИСТЕМА ДЛЯ СПУТНИКОВОЙ СВЯЗИ В ТУННЕЛЯХ | 2009 |
|
RU2528166C2 |
| СПОСОБ МОНИТОРИНГА СОСТОЯНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ ПРИ ДВИЖЕНИИ ПОЕЗДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2829561C2 |
Изобретение относится к области беспроводной оптической связи (БОС) и может быть использовано для проектирования систем двусторонней связи между стационарными и подвижными объектами. Технический результат состоит в создании устойчивых и надежных высокоскоростных каналов, адаптированных к условиям эксплуатации на железнодорожном транспорте и соединяющих мобильные устройства пассажиров, машиниста и членов поездной бригады подвижного состава с коммутаторами сетей оперативно-технологической, мобильной, спутниковой связи с помощью волоконно-оптической системы передачи информации (ВОСП). Для этого система беспроводной оптической связи помещается в термостабилизированный, экранированный от электромагнитных помех корпус и оснащается устройством автоматической подстройки оптической оси (АПОО) в передатчике, оптическим концентратором и полосовым фильтром в приемнике, автоматической регулировкой усиления приемника (АРУ), адаптивной системой подстройки мощности лазера (АСПМЛ). 1 з.п. ф-лы, 5 ил.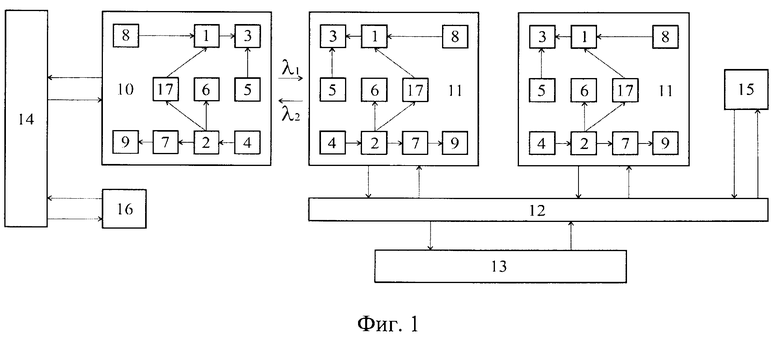
1. Система беспроводной оптической связи (БОС), состоящая из нескольких приемо-передающих узлов, каждый из которых содержит приемные и передающие оптические системы с автоматическим регулированием оптической оси, лазер с управляемым источником питания для регулирования мощности оптического сигнала и глубины амплитудной модуляции, фотоприемник, отличающаяся тем, что система включает стационарные устройства беспроводной двусторонней оптической связи (СУБОС) с приемо-передающими узлами и подвижные устройства беспроводной двусторонней оптической связи (ПУБОС) с приемо-передающими узлами, при этом СУБОС устанавливаются на опорах контактной сети на расстоянии друг от друга таким образом, чтобы диаграмма направленности оптического узла охватывала участок, равный максимально возможной длине поезда, ПУСОБ устанавливаются на крышах вагонов в середине вагона, вдоль железнодорожного полотна и опор контактной сети проложены волоконно-оптические линии связи (ВОЛС), соединяющие СУБОС с сетью оперативно-технологической связи, все ПУБОС по очереди подключаются к каналу БОС с помощью коммутатора и микропроцессора, расположенных на крыше поезда, которые выбирают и подключают к каналу БОС одну из ПУБОС по алгоритму детектора максимального значения.
2. Система по п. 1, отличающаяся тем, что приемники приемо-передающих узлов ПУБОС оснащены автоматической регулировкой усиления для стабилизации амплитуды электрического импульса из-за изменения уровня оптического сигнала в ПУБОС при движении поезда.
| УСТРОЙСТВО ПЕРЕДАЧИ ДАННЫХ ЧЕРЕЗ ОТКРЫТЫЙ ОПТИЧЕСКИЙ АТМОСФЕРНЫЙ КАНАЛ СВЯЗИ | 2005 |
|
RU2281610C1 |
| УСТРОЙСТВО ДВУСТОРОННЕЙ ОПТИЧЕСКОЙ СВЯЗИ | 1999 |
|
RU2155450C1 |
| Способ изготовления поверхностно алитированных топливников из ковкого чугуна | 1939 |
|
SU57995A1 |
| US 6760532 B1, 06.07.2004 | |||
| US 6775480 B1, 10.08.2004. | |||

