Область техники, к которой относится изобретение
Изобретение относится к области беспроводных оптических каналов связи (БОКС) инфракрасного диапазона и может быть использовано для проектирования систем двусторонней связи между стационарными объектами и беспилотными летательными аппаратами (БПЛА).
Задача изобретения состоит в создании устойчивых и надежных высокоскоростных каналов передачи информации с БПЛА для решения сложных задач мониторинга и управления в различных областях техники, экономики, транспорта, сельского хозяйства, а также силовых ведомств. Наиболее перспективным применением БПЛА является использование их в качестве базовых станций или ретрансляторов, связывающихся между собой с помощью атмосферной оптической связи или БОКС. Такая структура сети позволяет организовать мобильную связь в труднодоступных районах со сложным рельефом, где сооружение вышек связи затруднительно. Целесообразность применения БОКС для этих целей в качестве физических каналов связи обусловлено потребностью в повышении пропускной способности и преимуществами перед радиоканалами:
1) возможность использования диапазона частот, не требующего лицензирования;
2) нечувствительность к электромагнитным помехам;
3) электромагнитная совместимость с радиосредствами;
4) высокая скорость передачи данных;
5) высокий уровень безопасности передачи информации;
6) простота установки и небольшие габариты оборудования;
7) возможность совместного использования БОКС с БПЛА, позволяющая обеспечить структурную гибкость сети мобильной связи.
Однако имеются недостатки:
1) зависимость доступности и качества канала связи от погодных условий;
2) ограниченная дальность связи;
3) влияние вибраций на стабильность работы БОКС;
4) относительная дороговизна оборудования.
Целью изобретения является создание системы из беспроводных оптических каналов связи, работающей совместно с БПЛА, функционирующей в условиях нестабильности положения беспилотника и атмосферных воздействий, обеспечивающей требуемые показатели доступности и качества связи (Фиг. 1).
Уровень техники
Для создания канала управления БПЛА в сети мобильной связи с помощью беспроводной (атмосферной) оптической связи (Фиг. 2) необходимо решить две задачи: отслеживание положения БПЛА (оптической оси канала) в определенном секторе небесной сферы и регулирование оптического баланса в случае изменения погоды или положения БПЛА. Отслеживать перемещения БПЛА можно на основании данных от приемника спутниковой навигации беспилотника, переданных на стационарный пункт. В отсутствии приемника GPS или сигнала от спутниковой радиосвязи отслеживать оптическую ось двустороннего атмосферного канала возможно с помощью координат БПЛА, рассчитанных по проекции от конуса света на фотоматрице (ФМ) стационарного пункта (оператора). Для этого требуется восстановить контуры и диагонали эллипса, искаженные рэлеевским рассеянием, турбулентностью и другими воздействиями атмосферы с помощью компьютерного зрения и искусственных нейросетей (ИНС). Далее на основании измеренных координат (х, у) трех точек (пикселей) на контуре (диагоналях) эллипса (Фиг. З), полученных благодаря координатной сетки ФМ, с помощью несложных вычислений рассчитываются пространственные координаты БПЛА. Если помимо координат пикселей измерить мощность сигнала в этих трех точках, то на основании уравнения оптического баланса БОКС также можно получить координаты БПЛА (при условии известных величин: углов расхождения луча и подвески модема, мощности передатчиков и первоначальной высоты БПЛА). Ошибка в значениях координат БПЛА, вычисленных геометрическим способом и с помощью оптического баланса, возможна за счет ухудшения погоды или изменения положения БПЛА. Величину ошибки предлагается использовать для подстройки мощности лазеров и глубины модуляции в канале БОКС. Координаты БПЛА нужны для формирования «восходящего» конуса света от стационарного пункта к БПЛА (решения первой задачи для создания канала управления БПЛА). Заявляемый способ отслеживания оптической оси БОКС описывает один из возможных вариантов реализации оптической фазированной антенной решетки (ОФАР). Алгоритм работы «ОФАР» для канала управления БПЛА состоит из трех этапов: 1) обнаружение луча на ФМ оператора; 2) вычисление пространственных координат БПЛА; 3) формирование восходящего конуса света. По первым двум этапам имеются большое количество решений в иностранных и отечественных патентах, общим недостатком которых является применение элементов электромеханического сканирования, понижающих вероятность «захвата цели». Наиболее технически совершенные решения описаны в следующих патентах: 1) RU2 168 753 CI [1]; 2) RU 2 639 321 С1 [2]; 3) RU 152656U1 [3]; 4) RU 2 451 397 С2 [4]. Различные идеи реализации оптоэлектронных систем обнаружения БПЛА, изложенные в [1-3], предназначены для пеленгации и поражения целей в виде беспилотных летательных аппаратов и не предназначены для организации двусторонней связи. Координаты БПЛА определяются с помощью информации от «следа» (точки) отраженного от объекта света на ФМ оператора. В расчетах пространственных координат БПЛА используются координаты пикселя, привязанные к координатам планшета оператора. В качестве решения для формирования восходящего канала «ОФАР» наиболее технологичным является вариант, изложенный в RU 2552142С2 [5], в котором «ОФАР» реализуется на основе массива оптических волокон, работающих на эффекте электропреломления. В заявляемом изобретении также предлагается использовать оптические волокна, но другого типа, а именно фотонно-кристаллические (ФКВ) в сочетании с жидкими кристаллами (нематитами), функционирующими на основании эффекта Фридерикса.
Наиболее близкое решение к созданию «ОФАР» для двусторонней связи излагается в патенте [4] (прототип), в основе которого лежит использование двумерных матриц из светодиодов на передающей стороне и двумерной матрицы из пикселей на приемной стороне. По световому лучу от БПЛА на стороне оператора измеряются угловые координаты и затем с помощью линейки светодиодов формируется индикатриса излучения восходящего канала.
Главное отличие от заявляемого изобретения заключается в том, что для определения направления оптической оси на модем БПЛА на ФМ стационарного пункта фиксируется «след» (точка) в виде координат (х, у) с помощью с бифокального объектива и двух ПЗС-линеек. Для формирования направления оптического луча передатчика на БПЛА на стационарном пункте передающий блок стационарного устройства имеет линейку лазерных диодов, один из которых при известном угловом положении БПЛА «зажигается» с помощью электрооптического переключателя. К сожалению, в прототипе отсутствуют описания схем формирования индикатрисы лазерного луча передатчика на стационаре, а также пример расчета пространственного угла оптической оси лазерного диода с помощью двух линеек ПЗС.
В заявляемом изобретении для определения направления оптической оси предлагается оценивать координаты БПЛА по проекции конуса света на ФМ стационарного пункта или оператора. На основании этих координат с помощью специальных матриц: оптической из ФКВ и управляющей из электрических проводов в виде координатной сетки, лазерного диода и оптических линз формируется пространственный угол оптической оси БОКС на фотоприемник БПЛА. Таким образом, в заявляемом способе создания «ОФАР» используется эллипс на ФМ оператора, по очертаниям которого (координатам трех точек на диагоналях) согласно проективной геометрии, рассчитываются пространственные координаты БПЛА (Фиг. 3). Параметры эллипса (площадь, расположение диагоналей относительно начала координат ФМ, эксцентриситет, эллиптичность, распределение яркости пикселей внутри контура и т.д.) дают больше информации о расположении БПЛА и позволяют прогнозировать требуемые изменения в условиях работы (высоты или мощности передатчиков). Для регулировки оптического баланса БОКС в заявляемом изобретении предлагается дополнительно рассчитывать координаты с помощью уравнения оптического баланса. Сравнение значений пространственных координат БПЛА, рассчитанные двумя способами, покажет величину ошибки, которая возникает за счет изменений атмосферного затухания или высоты. В прототипе отсутствует возможность адаптивной регулировки мощности передатчиков в канале БОКС.
Дополнительным отличием прототипа от заявляемого изобретения является использование видимого света, что означает невозможность использования существующей элементной базы, разработанной для известных «окон прозрачности» и применяемой в волоконно-оптической связи.
Теоретические вопросы проектирования оптических беспроводных каналов, касающиеся заявляемого изобретения, освещены в работах [6-11]. В них изложены вопросы управления БПЛА с помощью беспроводных оптических каналов связи, а также имеются обоснования возможности оценки координат БПЛА с помощью проекции конуса света на ФМ стационарного пункта управления. Так, в источнике [6] представлены математические модели и аналитические исследования статистических характеристик оптического атмосферного канала с БПЛА на основании изображений эллипса на ФМ оператора при условии известных координат беспилотника. В заявляемом изобретении рассматривается обратная задача: по эллипсу (проекции конуса света на ФМ) рассчитываются координаты БПЛА. В источнике [7] анализируются способы использования изображения от видеокамеры для навигационных целей (геолокации) для следующих целей: определения дальности до цели (БПЛА); расстояния до столкновения с БПЛА по размерам «следа» (точки) на ФМ оператора; визуализация и сопровождение целей на основании разработанных компьютерных алгоритмов по пикселям на ФМ. Отличием от заявляемого изобретения является использование видимого диапазона и представления цели в виде точки. Для указанных выше целей не вычисляются координаты БПЛА. Поэтому не решаются задачи автоматической подстройки мощностей передатчиков. В источнике [8] описываются вопросы установления канала БОКС и организацию эстафетной передачи информации между ретрансляторами с БПЛА. Рассматривается только часть задач, решаемых в заявляемом изобретении. В отличие от заявляемого изобретения, в работе [8] имеются только алгоритмы решения задач, отсутствуют предложения по технической реализации. В источнике [9] рассматривается вариант подстройки оптической оси за счет ошибки положения луча (точки) в центре ФМ оператора. Величина ошибки передается по радиоканалу (обратной связи с БПЛА) и подстройка осуществляется за счет изменения оптической длины света в линзах модемов БОКС. В отличии от [9], в заявляемом изобретении не предполагается использование радиоканала для связи между БПЛА, который нарушил бы скрытность информации и защищенность от действия средств радиоэлектронной борьбы (РЭБ). Проблема подстройки оптической оси в заявляемом изобретении решается за счет варианта реализации оптической фазированной антенной решетки для оптического атмосферного канала БОКС. В источнике [10] рассматривается вариант БОКС, способной противостоять искажениям за счет турбулентности. Задача решается за счет детектора большой площади и короткофокусного объектива (камеры на 360°). Конструкция громоздкая и малопригодная для установки на БПЛА, используемого в телекоммуникационных сетях связи. В заявляемом изобретении предлагается использовать компьютерное зрение и искусственные нейросети, способные восстановить разрушенный за счет турбулентности контур эллипса на ФМ (Фиг. 1).
Раскрытие изобретения
Принципиальное отличие заявляемого изобретения от прототипа заключается в следующем. Предлагается двусторонний канал связи между стационарным пунктом управления сетью и БПЛА, выполняющего функцию ретранслятора или базовой станции мобильной связи, имеющего возможность во время функционирования сети изменять свое положение в ограниченном секторе небесной сферы. Для организации «восходящих» и «нисходящих» каналов обмена информацией (в том числе для управления работой БПЛА) предлагается организовать в инфракрасном диапазоне широкополосную устойчивую связь, не подверженную электромагнитным помехам (в том числе РЭБ) и не создающую такие помехи другим радиосредствам. Известными считаются следующие параметры оптических модемов, установленные в процессе инсталляции оборудования: углы расходимости и подвески лазера, первоначальная высота излучателя, а также мощность передатчика на БПЛА. На приемной стороне измеряются координаты и величина заряда пикселей (трех точек) проекции конуса света (эллипса) на ФМ стационарного пункта (Фиг. 3). Оценка пространственных координат БПЛА позволяет сформировать оптическую ось канала БОКС с помощью специальной оптоэлектронной матрицы из направляющих световодов, представляющих из себя оптические волокна (фотонно-кристаллические) и матрицы из горизонтальных и вертикальных шин в виде координатной сетки, управляемой путем включения электрического напряжения. Оценка пространственных координат БПЛА позволяет также регулировать мощность передатчиков БОКС в случае ухудшения погоды или высоты БПЛА. В прототипе заявляемого изобретения «след» от передатчика БПЛА представляется в виде точки на ФМ, что позволяет оценить угол между плоскостями расположения стационарного пункта и БПЛА с помощью бифокальной линзы и двух линеек фотоприемников. Этот угол используется для формирования направления излучения лазерного передатчика стационара на модем БПЛА с помощью одиночного лазерного диода LD, управляемого расположенным за ним дискретным однокоординатным электрооптическим поляризационным переключателем EOS. Выходной зрачок переключателя, находящийся в передней фокальной плоскости объектива оптического волокна (ОВ), «зажигается» в соответствии с угловым положением БПЛА. В заявляемом изобретении предлагается более простая схема выбора передающего канала (направления излучения передатчика) в виде полусферы из световодов (ФКВ), равномерно расположенных относительно друг друга, каждый из которых проводит свет от лазера (включается) в нужном пространственном угле при условии подачи электрического тока в соответствующие шины (горизонтальную и вертикальную) управляющей матрицы. При этом «открывается заглушка» из нематитов в нижней части ФКВ и волокно становится прозрачным. Таким образом, рассчитанный пространственный угол оптической оси (излучения лазера в сторону БПЛА) формируется с помощью полусферы из двумерных ФКВ (с первоначально полыми сердцевиной и отверстиями в оболочке, заполненными жидкими кристаллами) за счет эффекта Фридерикса. При пропускании электрического тока через соответствующие шины, на пересечении которых располагаются «заглушки» (основания ФКВ), создается необходимое электрическое поле, под действием которого меняется «прозрачность» волокна. Использование двумерного ФКВ в схеме формирования оптической оси, допускающего изгибы структуры волокна для достижения пространственного угла излучения, позволит упростить схему формирования луча в направлении БПЛА.
Сущность изобретения заключается в следующем. Задача заявляемого изобретения состоит в создании надежной системы двустороннего оптического беспроводного канала связи с беспилотным летательным аппаратом, позволяющей отслеживать оптическую ось БОКС между стационарным пунктом и БПЛА и регулировать мощность передатчиков оптических модемов. Для решения этой задачи предложен вариант «ОФАР», в основе которой лежат расчеты пространственных координат БПЛА по проекции конуса света на ФМ стационарного пункта и конструкция передатчика (Фиг. 4) из пучка световодов (фотонно-кристаллического волокна ФКВ) [11], один из которых пропускает свет от лазерного диода в направлении, соответствующем координатам БПЛА. Все остальные световоды (ФКВ) закрыты с помощью «заглушек» в виде оптических переключателей [12], представляющих из себя нижнюю часть ФКВ, заполненную жидкими кристаллами типа нематитов [13] и расположенных на специальных платах (в точках пересечения горизонтальных и вертикальных шин управляющей матрицы в виде координатной сетки), к которым подведено электрическое напряжение. Использование ФКВ (с полыми сердцевиной и отверстиями в оболочке) в качестве направляющих каналов объясняется уникальными свойствами оптического волокна по сравнению с обычным одномодовым волокном из диоксида кремния: одномодовый режим в ФКВ спектрально не ограничен и имеется большая эффективная площадь моды для транспортировки мощного светового излучения. Жидкие кристаллы (обычно мутные) под действием электрического поля, ориентирующего молекулы кристаллов сразу во всем объеме, становятся прозрачными (эффект Фридерикса). Нужный переключатель становится прозрачным в результате подключения электрического напряжения с помощью вертикальной и горизонтальной шин к плате (месту установки оптического переключателя, т.е. «заглушки» из нематитов в нижней части ФКВ) на координатной матрице. Место установки ФКВ (световода от излучателя) на управляющей матрице соответствует вычисленному углу оптической оси на полусфере передатчика стационарного пункта. Быстродействие срабатывания оптического переключателя на нематитах зависит от вязкости кристалла и может составлять доли миллисекунды.
Техническая реализация изобретения возможна за счет учета особенностей распространения света инфракрасного диапазона в атмосфере (рассеяний, поглощения, турбулентности и т.д.), сложностей захвата и слежения за оптической осью БОКС подвижного объекта, а также применения элементной базы современной электроники, позволяющей реализовать алгоритмы компьютерного зрения, искусственных нейросетей, конструкции передатчика стационарного пункта, отслеживающего БПЛА, а также учет оптоэлектронных характеристик направляющих световодов от источника излучения, состоящих из сочетания ФКВ и жидких кристаллов:
Технический результат заявляемого изобретения достигается за счет использования современных оптических модемов БОКС, работающих в «окнах прозрачности» атмосферы в диапазонах инфракрасного света, доказавших надежность, доступность, качество и дальность связи [14], необходимых для организации каналов с БПЛА. Большие достижения в области нейросетей, решающих задачи распознавания образов, позволят получить достоверную информацию о координатах БПЛА в условиях искажений конуса света турбулентностью в атмосфере.
Проведенный заявителем анализ уровня техники позволил установить, что заявителем не обнаружен аналог, характеризующийся признаками, идентичными всем существенным признакам заявляемого изобретения, а определение прототипа из перечня выявленных аналогов, как наиболее близкого по совокупности признаков аналога, позволило выявить совокупность существенных отличительных признаков, изложенных в формуле изобретения.
Следовательно, заявляемое изобретение соответствует требованию «новизны» по действующему законодательству.
Для проверки соответствия заявляемого изобретения требованию изобретательского уровня заявитель провел дополнительный поиск известных решений, результаты которого показывают, что заявляемое изобретение не следует из известного уровня техники, поскольку не выявлена система двустороннего беспроводного оптического канала связи с беспилотным летательным аппаратом, решающая одновременно две задачи: отслеживание оптической оси с БПЛА и регулировка оптического баланса.
Следовательно, заявляемое изобретение соответствует требованию «Изобретательский уровень» по действующему законодательству.
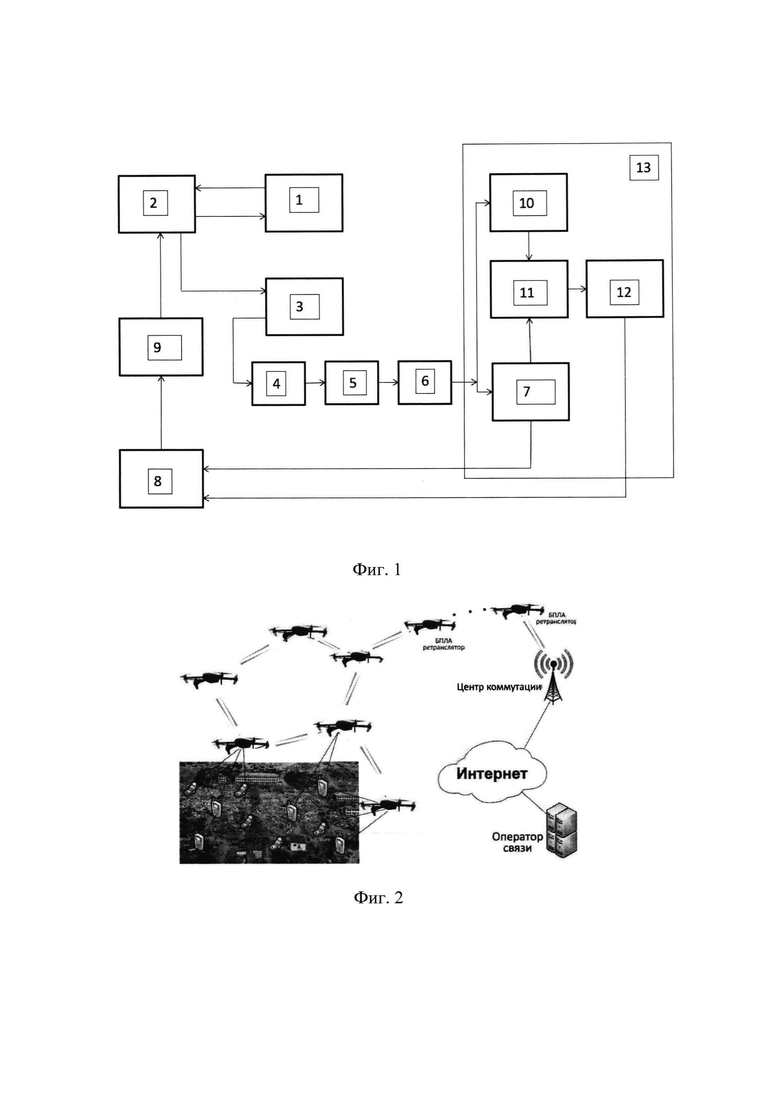
Система работает следующим образом. Световой сигнал с выхода передатчика (1) через атмосферный канал (2) поступает сквозь оптические линзы (3) приемника на вход фотоматрицы (4). Используя алгоритм компьютерного зрения (5), распознается проекция светового конуса и далее восстанавливается контур эллипса с помощью искусственной нейросети 6. На основании измеренных координат (х, у) и мощности сигнала в пикселях трех точек на диагоналях эллипса производятся расчеты пространственных координат БПЛА двумя способами: согласно проективной геометрии [15] в блоке (7) и на основании уравнения оптического баланса [16] в блоке (10) определяются длины ребер конуса, исходя из которых составляется система уравнений для расчета пространственных координат БПЛА для каждого способа отдельно. В блоке (11) вычисляется ошибка в расчетах пространственных координат в блоках (7) и (10), по величине которой в блоке (12) формируется электрический сигнал регулировки мощности лазерных передатчиков БОКС. Сигнал регулировки подается: 1) на устройство (8) в цепи питания лазера; 2) через оптическую систему передатчика стационарного пункта (9), канал (2) и приемник (1) в цепь питания лазера БПЛА. Подстройка оптической оси БОКС на стационарном пункте осуществляется с помощью вычисленных значений координат БПЛА от блока (7) и устройства (8). Расчеты, осуществляемые в блоках (7, 10, 11, 12), производятся в вычислительном устройстве (микропроцессоре) (13).
Таким образом, система двустороннего беспроводного оптического канала связи с беспилотным летательным аппаратом, состоящая, из оптических модемов стационарного и подвижного приемо-передающих устройств, отличающееся тем, что стационарное устройство, содержащее фотоматрицу из пикселей, расположенных в виде координатной сетки, устройство обнаружения восстановления контура проекции (эллипса) светового конуса, вычислительные устройства для расчета пространственных координат БПЛА двумя способами (с помощью проективной геометрии и уравнения оптического баланса) по измеренным координатам и мощности сигналов трех точек (пикселей) контура эллипса на ФМ, углам расхождения конуса света, подвески и высоты лазерного излучателя, мощности передатчика БПЛА, а также устройство формирования направления излучения лазерного передатчика стационарного пункта согласно рассчитанным координатам БПЛА, устройство вычисления ошибки координат БПЛА разными способами, устройство формирования сигнала регулировки мощности передатчиков и глубины модуляции в канале БОКС на основании величины ошибки, имеет следующие особенности:
1) для оценки пространственных координат БПЛА используется информация от проекции конуса света на ФМ стационарного пункта;
2) для распознавания контура (диагоналей) эллипса используются алгоритмы компьютерного зрения и искусственных нейросетей;
3) для регулировки оптического баланса БОКС и обеспечения требуемого коэффициента доступности канала при изменениях атмосферного затухания или дальности связи используются расчетные данные пространственных координат БПЛА, вычисленные с помощью проективной геометрии и уравнения оптического баланса;
4) для формирования направления излучения передатчика стационарного модема, отслеживающего оптическую ось БОКС согласно вычисленным координатам БПЛА, используется оптоэлектронная система, состоящая из лазерного диода и расположенных в виде полусферы световодов (оптических ФКВ, заполненных в нижней части нематитами для включения режима пропускания света в соответствии с рассчитанным пространственным углом излучения лазерного передатчика), управляемых с помощью двумерной матрицы в виде координатной сетки, состоящей из плат для установки оснований волокон на пересечении горизонтальных и вертикальных шин, по которым пропускается электрический ток, изменяющий оптические свойства ФКВ.
Краткое описание чертежей
На Фиг. 1 приведена структурная схема системы двухстороннего канала беспроводной оптической связи, предназначенная для отслеживания оптической оси БОКС и регулирования оптического баланса.
На Фиг. 2 приведено изображение телекоммуникационной сети с БПЛА в качестве ретрансляторов и базовых станций мобильной связи, которые соединяются между собой и центром коммутации с помощью БОКС.
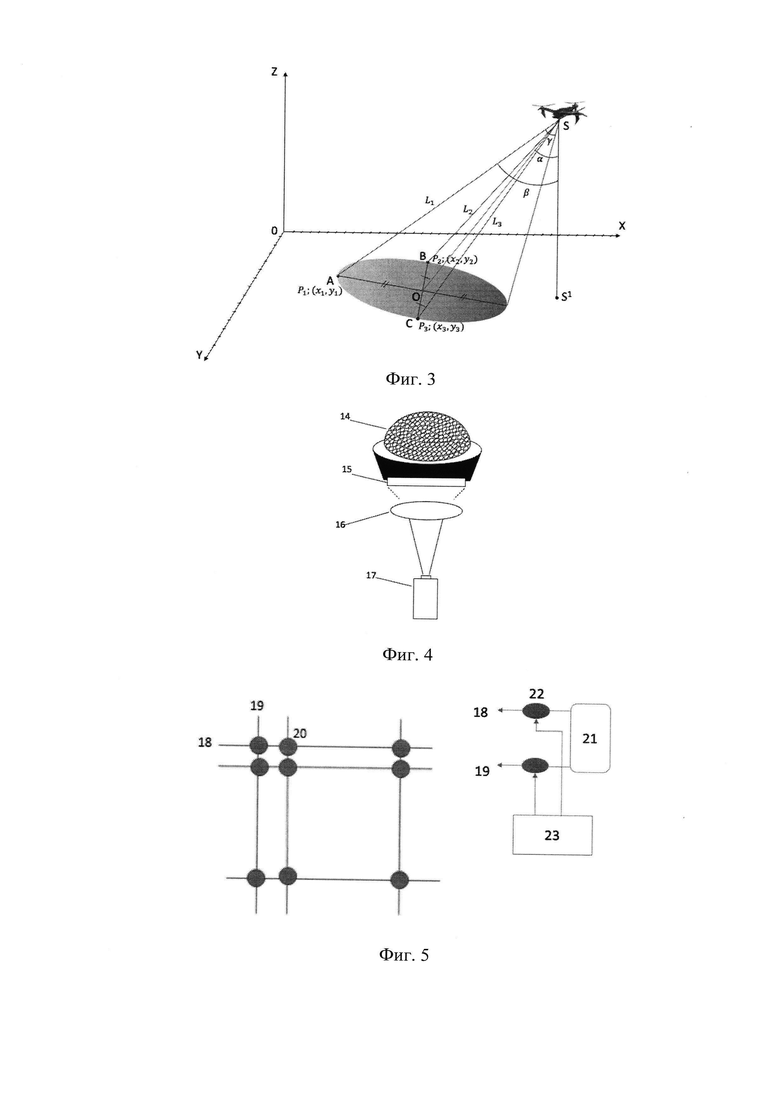
На Фиг. 3 приведен рисунок, поясняющий порядок расчета пространственных координат БПЛА с помощью проекции конуса света на ФМ (координат трех точек А, В, С эллипса) и уравнения оптического баланса (на основании накопленного заряда в пикселях точек А, В, С).
На Фиг. 4 приведено изображение передающего устройства на стационарном пункте в виде полусферы из световодов (ФКВ), управляемых с помощью двумерной матрицы в виде координатной сетки, состоящей из вертикальных и горизонтальных шин и прозрачных плат для установки оснований ФКВ. При пропускании электрического тока через соответствующие (горизонтальную и вертикальную) шины создается достаточное электрическое поле для режима пропускания света по выбранному оптическому волокну ФКВ (согласно рассчитанному пространственному углу).
На Фиг. 5 приведен рисунок управляющей матрицы в виде координатной сетки, в которой на пересечениях вертикальных и горизонтальных шин находятся прозрачные платы круглой формы для установки оснований ФКВ, а также источник питания с электронными ключами и устройством формирования сигналов, управляющих ключами.
Осуществление изобретения
На Фиг. 1 изображена система двухстороннего канала беспроводной оптической связи, состоящая из:
1 - приемо-передатчик БПЛА; уменьшить интервал между строками
2 - атмосферный канал;
3 - оптическая система приемника стационарного пункта;
4 - фотоматрица (ФМ) на стационарном пункте;
5 - устройство компьютерного зрения;
6 - искусственная нейросеть (ИНС);
7 - вычислительное устройство для расчета координат БПЛА (геометрия);
8 - система управления мощностью лазерного излучателя на стационарном пункте;
9 - оптическая система передатчика на стационарном пункте;
10 - вычислительное устройство для расчета координат БПЛА (оптический баланс);
11 - устройство вычисления ошибки в расчетах координат БПЛА;
12 - вычислительное устройство для расчета сигнала регулировки мощности лазеров;
13 - вычислительное устройство (микропроцессор).
Конус света от БПЛА (1) через атмосферный оптический канал (2) и оптическую систему приемника стационарного пункта (3), например, нахождения коммутатора доступа мобильной сети, поступает на ФМ (4) приемника. Контур эллипса (проекции конуса света на ФМ), искаженные рэлеевским рассеянием, восстанавливается с помощью компьютерного зрения (5). Затем контрастность (распределение яркости согласно накопленному заряду в пикселях) эллипса, разрушенного турбулентностью, восстанавливается с помощью ИНС (6). Восстановленная проекция конуса света подается на устройства расчета координат БПЛА (7) и (10) двумя способами, с выходов которых результаты поступают на устройство вычисления ошибки (11). Полученная ошибка используется для расчета сигнала регулировки мощности лазеров (12), который через передатчик (8) и оптическую систему (9) передается на БПЛА. Значения пространственных координат БПЛА с выхода (7) поступают в оптоэлектронную систему управления излучением лазера (8) для формирования угла оптической оси БОКС в сферической системе координат. Все вычисления происходят в микропроцессоре (13).
На Фиг. 2 изображены схема мобильной связи на базе БПЛА, где помимо беспилотников (вышек базовых станций), реализующих структуру сети сотовой связи, показаны мобильные абоненты, стационарная вышка с коммутатором доступа, соединенная через оптический кабель с сетью интернет и оператором.
На Фиг. 3 изображен наклонный конус света от БПЛА, который принимается фотоматрицей на стационарном пункте в виде эллипса. По координатам трех точек на главных диагоналях эллипса и величинам мощностей (заряда пикселей) в этих точках рассчитываются длины ребер двумя способами: геометрическим путем и на основании уравнения оптического баланса. В результате решения системы из трех уравнений, состоящих из координат точек и вычисленных двумя способами длин ребер, рассчитываются пространственные координаты БПЛА. Ошибка в результатах отображает несоответствие в величине атмосферного затухания при изменении погоды, учтенного ранее в уравнении оптического баланса. Ошибка используется для формирования сигнала управления мощностью лазеров БОКС.
На Фиг. 4 изображен рисунок передающего блока модема стационарного пункта (8), состоящего из световодов, расположенных в виде полусферы (14), управляемых с помощью двумерной матрицы (15) из электрических шин и плат для установки ФКВ, оптической системы передатчика (16) и лазерного излучателя (17). Отслеживание оптической оси осуществляется на стационарном пункте путем включения световода (на основе ФКВ с жидкими кристаллами), проводящего свет от лазера в направлении приемника БПЛА. Выбор требуемого световода и его включение осуществляется с помощью специальной матрицы (15) после подачи электрического тока в вертикальную и горизонтальную шину на основании рассчитанных координат БПЛА вычислительным устройством (13).
На Фиг. 5 изображена схема расположения проводящих горизонтальных и вертикальных шин в управляющей матрице (15), на пересечении которых расположены прозрачные платы в виде окружности (20) для установки нижней части ФКВ, заполненной нематитами для «включения» света от лазера (17). Верхняя часть ФКВ закрепляется в круглое отверстие («зрачок») полусферы (14), соответствующее вычисленному пространственному углу оптической оси БПЛА в сферической системе координат. При этом волокно подвергается изгибу по длине, что не влияет на параметры распространения света благодаря уникальным свойствам ФКВ. Подача электрического напряжения в горизонтальные (18) и вертикальные (19) шины происходит от источника (21) через электронные ключи (22) с помощью управляющих сигналов, формируемых в устройстве (23) согласно вычисленным координатам БПЛА в устройстве (7).
Работа системы двустороннего беспроводного оптического канала связи с беспилотным летательным аппаратом подтверждается результатами расчетов, полученных на основании формул, рассмотренных ниже и описывающих задачу расчета пространственных координат вершины конуса (БПЛА), представленного на Фиг. 3.
Исходные данные для расчета пространственных координат БПЛА:
1) угол расхождения лазерного луча передатчика БПЛА γ;
2) углы падения луча α, β соответственно между SO (оптической осью) и высотой SS1 конуса, между ребром конуса SA и высотой SS1 Фиг. 3);
3) первоначальная высота БПЛА и площадь эллипса (проекции конуса) на ФМ;
4) координаты диагоналей эллипса на ФМ приемника стационарного пункта;
5) начало координат на ФМ, привязанная к координатам места.
Расчет пространственных координат БПЛА после начала работы сети связи требуется для отслеживания оптической оси БОКС и предотвращения срыва связи в случае изменения положения БПЛА (Фиг. 3).
I. Порядок расчета пространственных координат БПЛА геометрическим путем.
1. Расчет изменившейся высоты конуса Н (БПЛА) с помощью измеренной площади эллипса на ФМ: чем больше высота, тем сильнее расхождение конуса и больше площадь проекции на ФМ.
2. Расчеты длины оптической оси (гипотенузы) из прямоугольного треугольника ΔOSS1 на основании высоты Н при известном угле α, а также и ребра конуса L1 (SA) из прямоугольного треугольника ΔASS1 при известном угле β.
3. Расчеты ребер конуса L2 (SB), L3 (SC) на основании измеренных на ФМ длин и координат диаметра эллипса из треугольников ΔCSO, ΔBSO (Фиг. 3) на основании следующего алгоритма: а) с помощью перпендикуляра из точки 0 на ребро конуса, входящего в треугольник (например, ΔBSO), последний делится на два прямоугольных треугольника (ΔFSO, ΔBFO), в которых ребро SB (L2) делится на две части (X1, Х2); б) расчет X1 по формуле:  в) расчет Х2 по формуле
в) расчет Х2 по формуле  (величина ВО есть половина малой диагонали эллипса), FO = SO ⋅ sin(β - α).
(величина ВО есть половина малой диагонали эллипса), FO = SO ⋅ sin(β - α).
4. Расчет пространственных координат БПЛА (X, Y, Z) на основании решения системы из трех уравнений:

где - измеренные координаты трех точек (пикселей)
- измеренные координаты трех точек (пикселей)
на диагоналях эллипса в точках А, В, С относительно начала координат ФМ (Фиг. 3).
Исходные данные для расчета пространственных координат БПЛА с помощью уравнения оптического баланса БОКС (Фиг. 3):
1) угол расхождения лазерного луча и мощность передатчика БПЛА соответственно γ, 
2) величина затухания сигнала в атмосфере для выбранной местности W и потерь в линзах приемо-передающих устройств БОКС 
3) размеры и ориентация эллипса в виде «следа» на ФМ стационарного пункта (координаты и значения величин заряда пикселей ФМ трех точек  на диагоналях эллипса (Фиг. 3) (см. пункт I);
на диагоналях эллипса (Фиг. 3) (см. пункт I);
4) начало координат на ФМ стационарного пункта (см. пункт I).
II. Порядок расчета пространственных координат БПЛА на основании уравнения оптического баланса.
1. Расчет составляющих (потерь) в уравнении оптического баланса с учетом мощности лазера БПЛА.
2. Расчет длин ребер на основании уравнения оптического баланса.
3. Расчет пространственных координат БПЛА с помощью системы из трех уравнений, рассмотренных выше согласно формулам (1)-(3) (см. пункт I).
Общие энергетические потери (Робщ) можно оценить по формуле:
 где
где
 - потери оптического согласования в оптических системах, т.е. приемопередающих линзах (величина постоянная порядка 1 дБм),
- потери оптического согласования в оптических системах, т.е. приемопередающих линзах (величина постоянная порядка 1 дБм),
 - затухание сигнала в атмосфере (потери мощности сигнала за счет поглощения и рассеивания при распространении через атмосферу W (дБм/км) и расстояния L (км),
- затухание сигнала в атмосфере (потери мощности сигнала за счет поглощения и рассеивания при распространении через атмосферу W (дБм/км) и расстояния L (км),
 - потери за счет расширения конуса света в процессе распространения, зависящие от величины угла расходимости лазерного луча у и дальности связи (дБм).
- потери за счет расширения конуса света в процессе распространения, зависящие от величины угла расходимости лазерного луча у и дальности связи (дБм).
Общие потери должны соответствовать оптическому балансу Q=

Для каждой из трех точек (А, В, С) на ФМ, соответствующих ребрам L1, L2, L3 (Фиг. 3), составляется уравнение оптического баланса. Расстояния L1, L2, L3 могут быть рассчитаны следующим образом:

На основании измеренных координат трех точек (А, В, С) на ФМ, соответствующих ребрам конуса, и вычисленным длинам L1, L2, L3 (согласно оптическому балансу) путем решения системы из трех уравнений (1)-(3) (см. пункт I) рассчитываются пространственные координаты БПЛА.
По каждой пространственной координате БПЛА, вычисленной двумя способами, рассчитывается ошибка. Эта ошибка возникает за счет изменения погоды (атмосферному затуханию W) или высоты БПЛА. По вычисленной ошибке формируется сигнал регулирования мощностей лазеров в канале БОКС. Результатом подстройки оптического баланса должно стать соответствие значениям координат БПЛА, полученных геометрическим путем.
При изменении величины W пропорционально изменятся по формуле (4), расчетные длины ребер конуса света (согласно оптическому балансу). Так, например, если величина W=20 дБм/км увеличится до 22 дБм/км, то длины ребер конуса света уменьшатся также в 1,1 раза. Отсюда ошибка в расчетах координат БПЛА (прежде всего высоты) будут иметь такой же порядок. По величине ошибки вычисляется значение подстройки мощности лазеров в канале БОКС (Фиг. 1).
Результаты расчета координат БПЛА для следующих исходных данных (см. пункт I):

Относительно начала координат на ФМ длины ребер L1,2,3 и пространственные координаты БПЛА X, Y, Z согласно системе уравнений (1) - (3) (Фиг. 3) имеют следующие значения:
Полученные результаты расчетов пространственных координат БПЛА свидетельствуют о том, что современный уровень техники и заявляемые алгоритмы расчетов позволяют реализовать систему двустороннего оптического беспроводного канала связи с беспилотным летательным аппаратом.
Литература
[1] Пат. №2168753 Российская Федерация, МПК G 05 D 3/12. Оптико-электронная следящая система / Н.В. Петров, И.М. Горчаков, В.И. Жемеров, Н.П. Баранов; патентообладатель Государственное Унитарное Предприятие Бюро Приборостроения». - №2000103587/09; заявл. 02.14.2000; опубл. 10.06.2001.
[2] Пат. №2639321 Российская Федерация, МПК G 01 S 5/16, G 01 S 3/781. Оптико-электронная система обнаружения объектов / А.В. Горобинский, С.К. Манкевич, Ю.В. Серякова; патентообладатель Акционерное общество «Швабе-исследования». - №2016152491; заявл. 29.12.2016; опубл. 21.12.2017; Бюл. №36.
[3] Пат. №152656 Российская Федерация, МПК G 01 S 3/78. Оптико-электронное устройство для обнаружения малогабаритных беспилотных летательных аппаратов /СВ. Шишков, А.И. Годунов, Д.В. Искоркин, А.В. Терешин, К. Музауи, К.С.Петелин, А.В. Молоствов, Е.Г. Синяев, С.В. Черный; патентообладатель Федеральное государственное казенное военное учреждение высшего профессионального образования «Военная академия материально технического обеспечения имени генерала армии А.В. Хрулева». - №2014137919/07; заявл. 18.09.2014; опубл. 10.06.2015; Бюл. №16.
[4] Пат.№2451397 Российская Федерация, МПК Н 04 В 10/10. Устройство системы оптической связи с автоматическим сопровождением светового луча на приемнике информации / А.Ф. Ширанков, А.Г. Аниканов, С.А. Штыков, A.M. Горелов, К.В. Гусев; патентообладатель Корпорация «САМСУНГ ЭЛЕКТРОНИКС Ко., Лтд.». - №2009137969/07; заявл. 14.10.2009; опубл. 20.05.2012; Бюл. №14.
[5] Пат.№2552142 Российская Федерация, МПК Н 01 Q 21/00. ОПТИЧЕСКАЯ ФАЗИРОВАННАЯ АНТЕННАЯ РЕШЕТКА / B.C. Верба, Л.В. Воронцов, Д.А. Даниленко, А.А. Бабайлов; патентообладатель Открытое акционерное общество «Концерн радиостроения «Вега». - №2013127797/08; заявл. 19.06.2013; опубл. 10.06.2015; Бюл. №16.
[6] Marzieh Najafi. Statistical Modeling of the FSO Fronthaul Channel for UAV-based Communications / Marzieh Najafi, Hedieh Ajam, Vahid Jamali, Panagiotis D. Diamantoulakis, George K. Karagiannidis and Robert Schober.
[7] Рэндал У. Биард. Малые беспилотные летательные аппараты: теория и практика / Рэндал У. Биард., Тимоти У. МакЛэйн // Техносфера. 2021.312 с.
[8] Пантелеймонов И.Н. Основные направления создания высоконадежной системы связи и управления БПЛА / Пантелеймонов И.Н., Белозерцев А.В., Монастыренко А.А., Боцва В.В., Наумкин А.В. // ИЗВЕСТИЯ ВЫСШИХ УЧЕБНЫХ ЗАВЕДЕНИЙ. МАШИНОСТРОЕНИЕ. -2020. - №6. - С.78-88. DOI: 10.18698/0536-1044-2020-6-78-88.
[9] Назарова К.С.Разработка автоматической системы подстройки положения лазерного излучения для воздушного канала связи / Назарова К.С, Давыдов В.В. // Ученые записки физического факультета московского университета. - 2023. - №4, 2341112. - С.1-5.
[10] Yiqing Zhang. Design of a Free Space Optical Communication System for an Unmanned Aerial Vehicle Command and Control Link / Yiqing Zhang, Yuehui Wang, Yangyang Deng, Axin Du, Jianguo Liu // Photonics. - 2021. - №8(5). С 163
[11] Фотонно-кристаллическое оптическое волокно // Википедия. Свободная энциклопедия. 2020. URL: https://clck.ru/3B3wLP (дата обращения: 30.03.2024).
[12] Fang Du. Electrically tunable liquid-crystal photonic crystal fiber / Fang Du, Yan-Qing Lu, Shin-Tson Wu // Applied Physics Letters. - 2004. - T. 85. С 2181-2183
[13] Нематические жидкие кристаллы // Википедия. Свободная энциклопедия. 2019. URL: https://clck.ru/3B3wp5 (дата обращения: 30.03.2024).
[14] Терминалы для мобильных объектов // МОСТКОМ: bridge your data. URL: https://moctkom.ru/ru/терминалы-для-мобильных-объектов/ (дата обращения: 30.03.2024).
[15] Проективная геометрия // Википедия. Свободная энциклопедия. 2023. URL: http://surl.li/uedpu (дата обращения: 30.03.2024).
[16] FSO (технология) // АКАДЕМИК. 2010. URL: https://dic.academic.m/dic.nsf/ruwiki/725898?vsclid=lwowo6fxie607915662 (дата обращения: 30.03.2024).
| название | год | авторы | номер документа |
|---|---|---|---|
| Пилотажно-навигационная система транспортного летательного аппарата | 2024 |
|
RU2822088C1 |
| СИСТЕМА ДВУСТОРОННЕЙ БЕСПРОВОДНОЙ ОПТИЧЕСКОЙ СВЯЗИ | 2020 |
|
RU2750237C1 |
| Способ определения с субпиксельной точностью пиксельных координат центра лазерного пятна маломощного лазера | 2024 |
|
RU2834963C1 |
| СПОСОБ ПРИМЕНЕНИЯ РОБОТИЗИРОВАННОГО ТАХЕОМЕТРА И БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ НАЗЕМНОГО ОБЪЕКТА | 2023 |
|
RU2809177C1 |
| Способ точной посадки беспилотного летательного аппарата и устройство для реализации способа | 2021 |
|
RU2773978C1 |
| УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ КРОВЯНОГО ДАВЛЕНИЯ | 2016 |
|
RU2648029C2 |
| СПОСОБ ПОСАДКИ БВС САМОЛЕТНОГО ТИПА НА ВЗЛЕТНО-ПОСАДОЧНУЮ ПОЛОСУ С ИСПОЛЬЗОВАНИЕМ ОПТИЧЕСКИХ ПРИБОРОВ РАЗЛИЧНОГО ДИАПАЗОНА | 2019 |
|
RU2724908C1 |
| ОПТИЧЕСКАЯ СИСТЕМА СВЯЗИ ЧЕРЕЗ АТМОСФЕРУ | 2020 |
|
RU2813447C2 |
| Система автоматической дозаправки беспилотного летательного аппарата | 2020 |
|
RU2757400C1 |
| УСТРОЙСТВО ДЛЯ ОТОБРАЖЕНИЯ ВИДЕОИНФОРМАЦИИ НА ТРЕХМЕРНЫХ ЭКРАНАХ | 2004 |
|
RU2258949C1 |
Изобретение относится к области беспроводных оптических каналов связи (БОКС) инфракрасного диапазона и может быть использовано в системах двусторонней связи между стационарными объектами и беспилотными летательными аппаратами (БПЛА), а также другими подвижными объектами. Техническим результатом является создание устойчивых и надежных высокоскоростных каналов передачи информации с БПЛА для решения сложных задач мониторинга и управления. Таким образом, для создания канала управления БПЛА с помощью атмосферной оптической связи необходимо решить две задачи: отслеживание положения БПЛА (оптической оси канала) в определенном секторе небесной сферы и регулирование оптического баланса в случае изменения погоды или координат. Предлагается решить эти задачи с помощью оценки положения проекции от конуса света на фотоматрице (ФМ) стационарного пункта. Предлагается алгоритм действий: 1) восстановление контура и диагоналей эллипса с помощью компьютерного зрения и искусственной нейросети; 2) расчет с помощью проективной геометрии пространственных координат БПЛА на основании измеренных координат (х, у) трех точек (пикселей) эллипса на ФМ; 3) аналогичный расчет координат БПЛА на основании уравнения оптического баланса и измеренной мощности сигнала в пикселях трех точек ФМ; 4) расчет ошибки в значениях координат БПЛА, вычисленных геометрическим способом и с помощью оптического баланса (при условии известных: углах расхождения и мощности передатчика), и использование ее для подстройки мощности лазеров; 5) формирование на основании вычисленного пространственного угла оптической оси БПЛА восходящего канала связи с помощью специальной полусферы из оптических волокон ФКВ. Заявленный способ организации атмосферного оптического канала описывает один из возможных вариантов реализации оптического аналога фазированной антенной решетки. 3 з.п. ф-лы, 5 ил.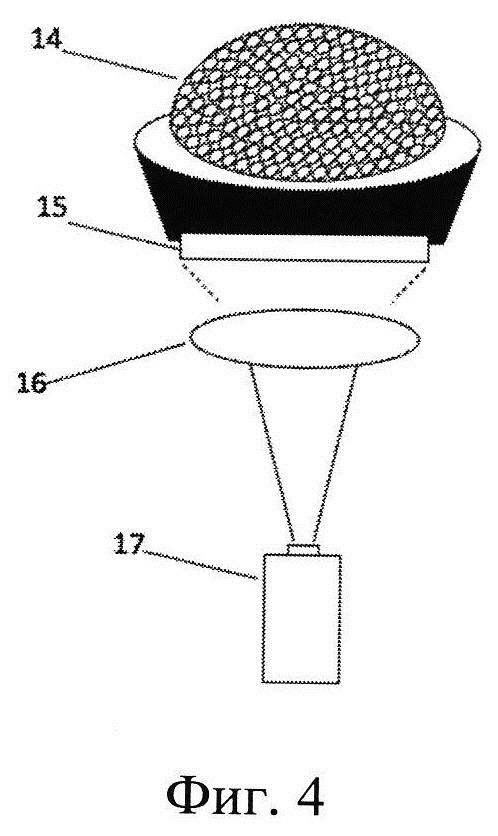
1. Система двустороннего беспроводного оптического канала связи (БОКС) с беспилотным летательным аппаратом (БПЛА), состоящая из оптических модемов стационарного и подвижного приемо-передающих устройств, отличающаяся тем, что стационарное устройство содержит фотоматрицу (ФМ) из пикселей, расположенных в виде координатной сетки, устройство обнаружения и восстановления контура проекции светового конуса, вычислительные устройства для расчета пространственных координат БПЛА двумя способами - с помощью проективной геометрии и уравнения оптического баланса - по измеренным координатам и мощности сигналов трех точек контура эллипса на ФМ, известным углам расхождения конуса света, подвески и высоты лазерного излучателя, мощности передатчика БПЛА, а также устройство формирования направления излучения лазерного передатчика стационарного пункта согласно рассчитанным координатам БПЛА, устройство вычисления ошибки координат БПЛА, вычисленные двумя вышеупомянутыми способами, устройство формирования сигнала регулировки мощности передатчиков и глубины модуляции в канале БОКС на основании величины ошибки, при этом передатчик выполнен из пучка световодов - фотонно-кристаллического волокна (ФКВ), один из которых пропускает свет от лазерного диода в направлении, соответствующем координатам БПЛА, а остальные световоды ФКВ закрыты с помощью оптических переключателей, представляющих из себя нижнюю часть ФКВ, заполненную жидкими кристаллами типа нематитов, и расположенных на платах в точках пересечения горизонтальных и вертикальных шин управляющей матрицы в виде координатной сетки, к которым подведено электрическое напряжение.
2. Система по п.1, отличающаяся тем, что в ней используется эллипс на ФМ оператора, по очертаниям которого - координатам трех точек на диагоналях рассчитываются пространственные координаты БПЛА для формирования пространственного угла оптической оси БОКС на приемник БПЛА.
3. Система по п.1, отличающаяся тем, что для регулировки оптического баланса БОКС и обеспечения требуемого коэффициента доступности канала при изменениях атмосферного затухания или дальности связи она выполнена с возможностью использования расчетных данных пространственных координат БПЛА, вычисленных с помощью проективной геометрии и уравнения оптического баланса.
4. Система по п.1, отличающаяся тем, что для формирования направления излучения оптического модема стационарного приемо-передающего устройства, отслеживающего оптическую ось БОКС согласно вычисленным координатам БПЛА, она выполнена с возможностью использования оптоэлектронной системы, состоящей из лазерного диода и расположенных в виде полусферы световодов, представляющих собой оптические ФКВ, заполненные в нижней части нематитами для включения режима пропускания света в соответствии с рассчитанным пространственным углом излучения лазерного передатчика, управляемых с помощью двумерной матрицы в виде координатной сетки, состоящей из плат для установки оснований волокон на пересечении горизонтальных и вертикальных шин, по которым пропускается электрический ток, изменяющий оптические свойства ФКВ.
| АНТОНОВ А.А | |||
| и др., Перспективы беспроводного оптического канала связи, Автоматика, связь, информатика, N9, 2023, сентябрь | |||
| ОГНЕВ Б.Г., Разработка экспериментальной установки для исследования распространения лазерного модулированного излучения через атмосферу, Специальность: 1.3.2 | |||
| "Приборы и методы экспериментальной физики", Автореферат |

