Изобретение относится к средствам обеспечения безопасности на железнодорожном транспорте и может быть использовано для определения и идентификации объектов, находящихся на путях следования железнодорожного транспорта и передачи данных для оповещения, при движении на всём пути следования, машиниста поезда и оператору центра дистанционного контроля и управления, о наличии препятствий в зоне контроля.
Заявляемое техническое решение, используя в системе способ мониторинга железнодорожного пути и устройство для реализации способа - беспилотные летательные аппараты, позволяет при движении высокоскоростных поездов проводить непрерывный мониторинг состояния железнодорожного пути, с выводом информации в кабину машиниста и оператору центра дистанционного контроля и управления.
Из предыдущего уровня техники известна - «Инфраструктурная система технического зрения обеспечения безопасности движения поездов в области ограниченной видимости». Патент РФ №275215.
Инфраструктурная система технического зрения обеспечения безопасности движения поездов, в области ограниченной видимости содержит видеокамеры, лидар и тепловизор, которые через соответствующие модули обработки объектов соединены с соответствующими входами вычислителя, который содержит модуль обнаружения и идентификации объектов, с подключенным к нему модулем искусственной нейронной сети. При этом, к вычислителю подключены- приемник сигналов спутниковой навигационной системы, извещатель, модуль автоматической калибровки, модуль диагностики и модуль связи и передачи данных, который по высокоскоростной линии связи соединен с бортовой системой оповещения и центром дистанционного контроля и управления. Центр дистанционного контроля и управления содержит последовательно соединенные модуль связи и передачи данных, вычислитель, модуль управления и монитор машиниста-оператора. Бортовая система оповещения состоит из вычислителя, который подключен к блоку микропроцессорной системы управления и диагностики поезда, модуля связи и передачи данных и монитора машиниста. Недостатком данной системы является - стационарная установка анализирующих датчиков, ограничивающих достоверность информации, а спутниковая система не всегда обеспечивает безопасную работу системы.
Из предыдущего уровня техники известен - «Стационарный комплекс обнаружения препятствий в области ограниченной видимости» Патент РФ №2711480.
Комплекс содержит видеокамеры, основной вычислительный блок, дополнительный вычислительный блок, каждый вычислительный блок состоит из процессора с подключенными к нему модулем синхронизации и модулем обнаружения препятствий, соединенным с модулем обработки данных радара и с модулем обработки данных видеокамер, которые подключены соответственно к выходу радара и к выходам видеокамер, при этом в основной вычислительный блок дополнительно введены и подключены к процессору модуль поездной ситуации, соединенный с модулем оповещения, модуль сравнения, выходом соединенный с модулем оповещения, и устройство шифрации и дешифрации, соединенное с радиомодемом, второй вход модуля сравнения подключен к процессору дополнительного вычислительного блока, модули синхронизации основного и дополнительного вычислительных блоков соединены с навигационным приемником, а с выходом модуля оповещения соединен извещатель. Недостатком данной системы является - стационарная установка анализирующих датчиков. Сложная система контроля снижает оперативность получения информации, это затрудняет принятие оптимальных решений, обеспечивающих безопасность движения, так же имеется возможность ложного срабатывания, например, при хакерской атаке, что делает систему контроля при передаче и формировании в центре контроля – ложной для принятых решений в отношении движения на данном участке. Данные факторы исключают оперативность принятие решений машинистом или центром управления.
Из предыдущего уровня техники известна - «СИСТЕМА УДАЛЕННОГО КОНТРОЛЯ И ИНФОРМИРОВАНИЯ МАШИНИСТА О ЗАНЯТОСТИ ЖЕЛЕЗНОДОРОЖНОГО ПЕРЕЕЗДА» Патент РФ № 2667035.
Система включает бортовую часть и установленные на переезде видеокамеры, устройство приема-передачи радиосигнала и средство определения занятости переезда, предназначенное для формирования сигнала о наличии объекта на переезде в случае соответствия этого объекта заранее заданным параметрам по форме и размеру. Причем бортовая часть включает размещенные на локомотиве устройство приема-передачи радиосигнала, управляющий контроллер, монитор машиниста, запоминающее устройство, тревожные сигнализаторы, средство расчета тормозных кривых, средство определения скорости локомотива, текущей координаты, даты и времени, модуль хранения характеристик локомотива и поезда, блок электронной карты маршрута, устройство формирования сигнала «тревога» и формирования видеокадра. Недостатком данной системы является - стационарная установка анализирующих датчиков препятствий. С датчиков препятствий сигнал отправляется в форме радио сигнала, поэтому сигнал может быть искажён или заблокирован, а в случае поломки датчика сохраняется возможность столкновения с препятствием, снижается достоверность информации, или она отсутствует. Данные факторы исключают оперативность принятие решений машинистом или центром управления.
Из предыдущего уровня техники известна- «СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ СОСТОЯНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ» Патент РФ №2313465. Автор(ы): Финк Юрий Михайлович (RU), Коваленко Владимир Наумович (RU), Морозов Лев Алексеевич (RU), Зингерман Александр Петрович (RU).
Система дистанционного контроля состояния железнодорожного пути, характеризуемая наличием установленной на опоре вблизи железнодорожного пути в зоне повышенной опасности видеокамеры, подключенной к беспроводному передатчику видеосигнала, а также установленными на локомотиве приемником видеосигнала, системой спутниковой навигации и монитором, подключенными к электронному блоку контроля и управления. Зона передачи видеосигнала от видеокамеры составляет не менее 3 тормозных путей грузового состава, а электронный блок управления выполнен с возможностью анализа получаемого изображения области зоны повышенной опасности и при наличии предмета между рельсами, или в случае нарушения целостности железнодорожного пути - вывода изображения на монитор и передачи изображения в память электронного блока, одновременно с указанием координат нарушения железнодорожного пути или постороннего предмета, а также выработки автоматического сигнала на торможение поезда. Одновременно с видеокамерой может устанавливаться тепловизионная камера. Недостатком данной системы является - стационарная установка анализирующих датчиков. Данная установка датчиков ведёт к ограничению зон обзора, что не позволяет получить достоверную информацию о наличие препятствий и достоверности их индификации. В случае поломки датчика сохраняется возможность столкновения с препятствием, снижается достоверность информации, или она отсутствует. Данные факторы исключают оперативность принятие решений машинистом или центром управления. Для предлагаемого изобретения данное техническое решение выбрано прототипом.
Задача изобретения. С целью достоверности контроля и эффективности принимаемых решений, для безопасности всех движущихся средств, в зоне необходимого контроля железнодорожного пути, проводить непрерывный мониторинг состояния железнодорожного пути, с выводом информации в кабину машиниста и оператору центра дистанционного контроля и управления.
Решение поставленной задачи. Непрерывный мониторинг состояния железнодорожного пути с выводом информации в кабину машиниста и оператору центра дистанционного контроля и управления производится с борта беспилотного летательного аппарата (БПЛА) вертикального взлёта и посадки, летящего впереди, по маршруту движения скоростного поезда. Принимая во внимание «Основы безопасности движения на железнодорожном транспорте» (интернет. ссылка https://helpiks.org/8-68550.html Табл. 4 «Длина тормозных путей») согласно нормативным показателям и формулировке второго закона безопасности движения: расстояние между постоянными сигналами, соответствующее полному служебному торможению, должно превышать длину тормозного пути при экстренном торможении для любых поездов не менее чем на 20 % и не менее чем на 40 % для пассажирского движения со скоростями выше 160 км/ч. Также, учитывая данные Таблицы 4, определяем необходимую минимальную дистанцию между головой поезда и БПЛА.
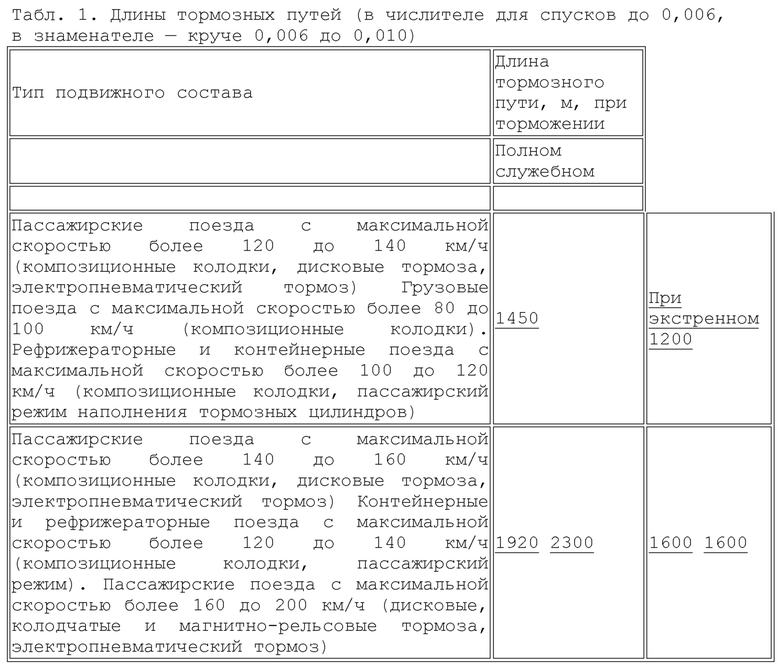
Дистанция, между локомотивом скоростного поезда и БПЛА, выбирается по условию безопасного торможения состава, например, тройной путь торможения состава, при возникновении аварийной ситуации по пути следования согласно таблице, принимаем, например, на скорости 200 км/ч (максимальную величину) 2300×3=6900 м. Этот путь поезд проходит за время 200км/ч : 60 мин=3,33 км/мин. или 6,9 км: 3,33км/мин = 2 мин. 2 минуты - это время для реагирования на наличие аварийной ситуации, системой с БПЛА, для поезда, двигающегося со скоростью 200км/ч. с учётом запаса тройного пути торможения. Информация с БПЛА при полёте поступает как в кабину машиниста, так и оператора центра дистанционного контроля и управления. Управление беспилотным БПЛА осуществляется вычислительным комплексом (ВК) с искусственным интеллектом (ИИ) и при необходимости, в ручном режиме. Причём в (ВК) закладывается информация об аварийных режимах, на которые следует реагировать. Полёт летательного аппарата производится на высоте выше контактной линии электропоезда. Препятствием для движения БПЛА, по пути следования, могут являться туннели и мосты, которые БПЛА преодолевает над путепроводом ниже контактной сети, то есть перед данным препятствием БПЛА – снижаясь, обходит сбоку контактную сеть и продолжает полёт под контактной сетью. При большой протяжённости туннеля, при наличии террористической угрозы, БПЛА преодолевает туннель на повышенной скорости. В основном, полёт беспилотного летательного аппарата (БПЛА) производится со скоростью движения поезда, но в случае необходимости полёт БПЛА может производится с превышением скорости движения поезда.
Функциональные возможности БПЛА при движении:
Мониторинг состояния железнодорожного полотна на наличие препятствий в режиме реального времени.
Мониторинг состояния контактной сети в режиме реального времени и при просмотре в записи.
Мониторинг окружающей инфраструктуры по пути движения, включая контроль регулируемых и не регулируемых переездов, как в режиме реального времени, так и в записи.
При наличии аварийной ситуации, выявленной вычислительным комплексом (ВК) с искусственным интеллектом (ИИ), при мониторинге БПЛА, информация поступает в кабину машиниста и пульт диспетчера, для автоматического или ручного реагирования, например, тормозной системой поезда. БПЛА кроме обычной системы видеокамер, для более эффективной работы в ночное время и в зоне снижения видимости может быть оснащён инфракрасной (ИК) камерой. Дальность полёта БПЛА на маршруте и время нахождения в воздухе, определяется запасом энергии в аккумуляторах, установленных на борту БПЛА. На современном уровне развития техники, и протяжённости маршрутов поездов, необходимо применение на маршруте смена заряженных БПЛА на разряженные. Возможные технические решения по замене БПЛА по пути следования.
Установка автоматических пунктов, смены БПЛА с автоматической зарядной станцией. Автоматические пункты могут быть установлены на железнодорожных станциях и иных структурных железнодорожных подразделениях. Дистанция между автоматическими пунктами определяется возможностями энергоёмкости аккумуляторов, установленных на БПЛА.
Другим возможным техническим решением по использованию БПЛА на маршруте, является установка пункта смены БПЛА непосредственно на поезде. Основным ограничением, в осуществлении данного технического решения, является наличие расположенной вверху контактной сети, что препятствует установки БПЛА на крыше вагона состава. Возможна установка БПЛА на специально изготовленной прицепной платформе, размещённой, например, последней в составе поезда и имеющая минимальное расстояние над землёй. Прицепная платформа является автоматической зарядной станцией и взлётно-посадочной платформой для БПЛА, при наличии функции вертикального взлёта и посадки БПЛА. При этом, платформа может использоваться во время движения скоростного поезда. Платформа, комплектуется двумя или больше БПЛА с местами автоматической зарядки. В движении один БПЛА находится в полёте, а другой на зарядке. Взлёт БПЛА с движущейся платформы происходит следующим образом; на БПЛА включаются двигатели создающие вертикальную тягу, БПЛА отрывается от контактов зарядного устройства и зависает над железнодорожным полотном. Платформа в это время перемещается вперёд. БПЛА взлетает, огибая контактную сеть, набирает высоту, обгоняет состав и выходит на рабочую дистанцию. Посадка производится следующим образом; БПЛА заходит в хвост поезда, на скорости догоняет платформу и зависает в области контактов контактного зарядного устройства или в области площадки бесконтактного зарядного устройства, затем садится, и начинается зарядка батарей. Безусловно, при взлёте – посадке БПЛА при неподвижном составе, процесс взлёта и посадки происходит как с неподвижной зарядной площадки. При внедрении данной системы возможно применение обеих вариантов.
Для функционирования системы, необходим БПЛА вертикального взлёта и посадки со скоростями самолёта и возможностью функции зависания – вертолёта. Существующие лучшие модели квадрокоптеров-беспилотников поднимаются и опускаются, и передвигаются со скоростью 30-40 км/ч, но наиболее распространенным параметром скорости горизонтального движения остается показатель в 10-15 км/ч, то есть квадрокоптеров не в состоянии обеспечить сопровождение высокоскоростных поездов, идущих со скоростью от 200км/ч и выше.
Технический результат, позволяющий обеспечить сопровождение высокоскоростных поездов БПЛА, достигается тем, что БПЛА выполнено с несущим крылом, все установленные тяговые движители БПЛА используются в режиме подъёма спуска и маневрирования. в режиме многороторного вертолёта – мультикоптера. В режим горизонтального полёта, при наличии крыла, все движители переводятся в режим горизонтальной тяги. Перевод в режим горизонтальной тяги производится без дополнительных исполнительных механизмов, только силой тяги установленных на аппарате движителей. Для поворота движителей в режим горизонтальной тяги создаётся равновесная система между парой жёстко соединённых прямолинейным элементом, расположенным вдоль продольной оси летательного аппарата, движителей. Как вариант, движители установлены на концах крыльев на поворотных осях. При подъёме БПЛА, на движителях создают тягу равную по величине и перпендикулярную к земле, при этом, при достаточной тяге, происходит подъём летательного аппарата. Следующим этапом нарушается равновесие тяги соединённых прямолинейным элементом движителей, то есть на задним движителе увеличивается тяга, а на переднем уменьшается, и система «пара движителей» получает вращение, при установлении тяги горизонтального направления на движителях, тяги сравниваются по величине и аппарат получает результирующий горизонтальный вектор тяги от пары движителей. Вертикальный спуск летательного аппарата производится в обратном порядке. Равновесие на движителях при данном способе можно установить при любом угле поворота системы, чем обеспечивается направление тяги в плоскости вдоль продольной оси летательного аппарата. Для более стабильного поворота пары движителей, прямолинейный элемент закреплён на поворотной оси, жестко связанной с крылом БПЛА. Для фиксации движителей в вертикальном или горизонтальном положении в узле поворота на оси установлены устройства фиксации или механизм торможения, позволяющие получить жёсткое соединение движителей с аппаратом в различных режимах полёта. Движители, создающие тягу, конструктивно могут быть выполнены - винтовыми, турбовинтовыми реактивными и так далее, но при исполнении движителей с винтами требуется компенсировать реакцию вращающего винта, то есть вращение пары винтов должны иметь разное направление, особенно при работе в режиме мультикоптера. Дополнительно, для стабильной работы БПЛА в переходных режимах, БПЛА возможно снабдить движителем, например, в носовой части БПЛА, создающим только горизонтальную тягу.
Технический результат изобретения достигается тем, что согласно заявленного способа и применение БПЛА для осуществления способа:
Используются в системе мониторинга состояния железнодорожного пути, беспилотные летательные аппараты (БПЛА), что позволяет при движении поездов проводить непрерывный мониторинг в режиме реального времени состояния железнодорожного пути, с выводом информации в кабину машиниста и оператору центра дистанционного контроля и управления. Это обеспечивает безопасность движения железнодорожного транспорта.
Проводится мониторинг состояния контактной сети в режиме реального времени и при просмотре в записи. Это позволяет осуществлять безопасную эксплуатацию контактной сети.
Проводится мониторинг окружающей инфраструктуры, по пути движения, как в режиме реального времени, так и в записи. Это позволяет осуществлять безопасную эксплуатацию железнодорожной инфраструктуры.
Применяется в системе для мониторинга БПЛА вертикального взлёта и посадки со скоростью самолёта и возможностями мультикоптера. Это позволяет осуществлять мониторинг состояния железнодорожного пути при движении поезда и обеспечить безопасность движения.
Используются в системе мониторинга сменные по дистанции БПЛА, со стационарными пунктами зарядки. Это делает экономически целесообразным использовать аккумуляторы с ёмкостями достаточными для преодоления оптимальной дистанции.
Используется в системе мониторинга платформа как пункт зарядки и взлёта-посадки БПЛА, как при стоянке, так и при движении состава. Это делает экономически целесообразным использовать аккумуляторы с ёмкостями достаточными для преодоления оптимальной дистанции.
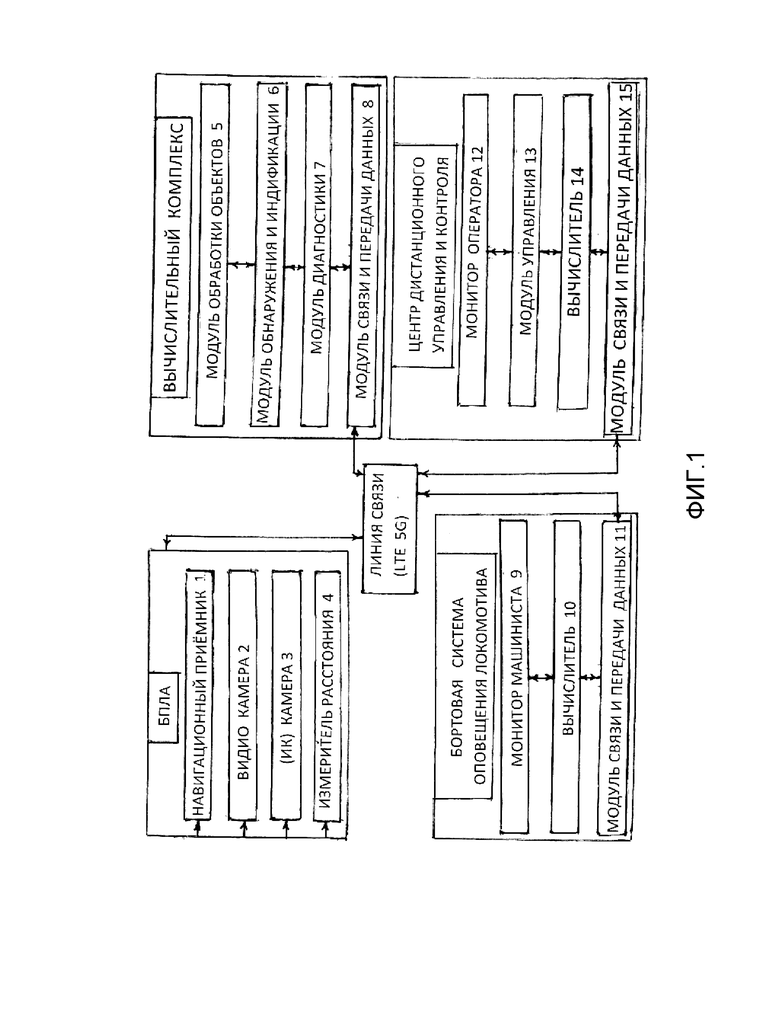
На фиг.1 представлена блок-схема инфраструктурной системы технического зрения, обеспечения безопасности движения поездов, с применением БПЛА в качестве носителя датчиков технического зрения, летящего впереди поезда на дистанции, достаточной для реагирования ВК, машинистом поезда и оператора центра дистанционного контроля и управления.
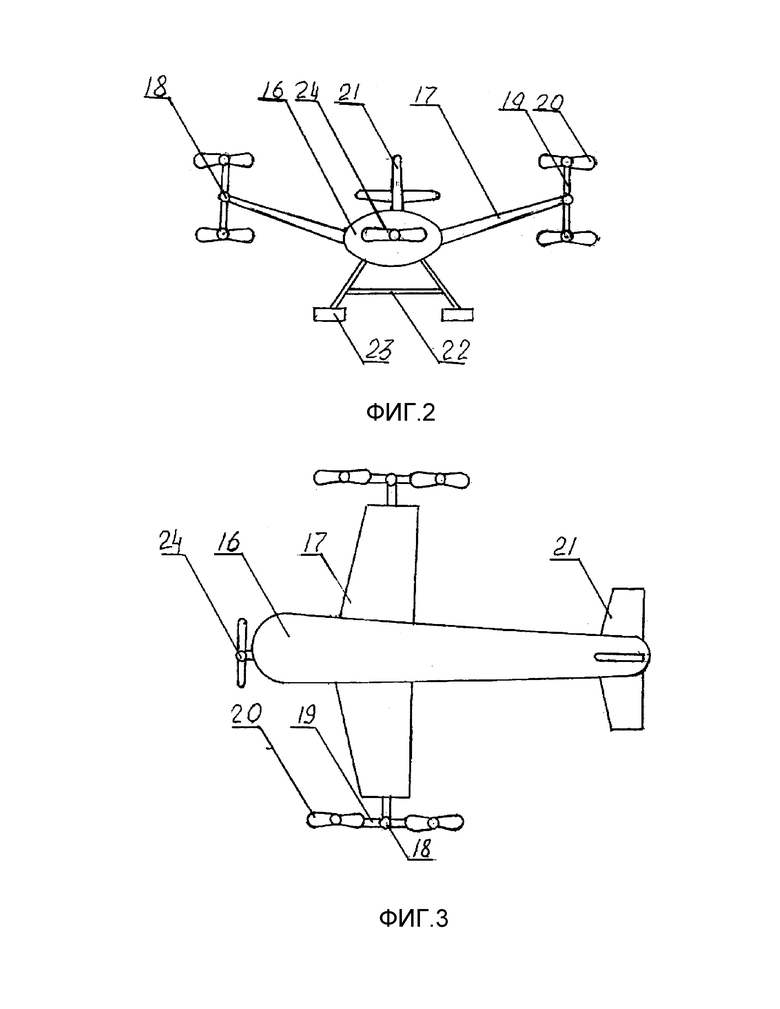
На фиг.2 представлен БПЛА вертикального взлёта и посадки используемой в системе, показанный в режиме горизонтального полёта. Вид спереди.
На фиг.3 представлен БПЛА вертикального взлёта и посадки, используемой в системе, показанный в режиме взлёта и посадки. Вид сверху.
Системы мониторинга, обеспечения безопасности движения поездов, с применением БПЛА в качестве носителя видеокамер, работающими в различных частотных диапазонах, летящим впереди поезда на дистанции, достаточной для реагирования вычислительным комплексом (ВК), машинистом поезда и оператора центра дистанционного контроля и управления содержит: Установленные на БПЛА навигационный приёмник 1, видеокамеру 2, ИК камеру 3, измеритель расстояния 4. Вычислительный комплекс (ВК) с искусственным интеллектом снабжён модулем обработки объектов 5, модулем обнаружения и идентификации 6, модулем диагностики 7 и модулем связи и передачи данных 8. Бортовая система оповещения локомотива оснащена монитором машиниста 9, вычислителем 10 и модулем связи и передачи данных 11. Центр дистанционного управления и контроля оснащён монитором оператора 12, модулем управления 13, вычислителем 14 и модулем связи и передачи данных 15. Связь в системе осуществляется через линию связи (LTE 5G). В системе, используется БПЛА вертикального взлёта и посадки, состоящий из фюзеляжа 16, крыльев 17, с установленными на концах крыльев 17 на осях 18 с фиксаторами положения (на фиг не показаны) поворотными прямолинейными элементами 19. На концах прямолинейных элементов 19 установлены движители 20 с воздушными винтами. На БПЛА установлено хвостовое оперение 21 и шасси 22 с установленными контактными площадками зарядки 23. Дополнительно БПЛА снабжён движителем 24 с воздушным винтом.
Работа системы осуществляется при запуске БПЛА впереди поезда. При этом осуществляется непрерывный мониторинг датчиками, установленными на борту БПЛА состояния железнодорожного пути, с выводом информации в кабину машиниста и оператору центра дистанционного контроля и управления. Связь в системе: между БПЛА, вычислительным комплексом (ВК) с искусственным интеллектом, бортовой системой оповещения локомотива и центром дистанционного управления и контроля осуществляется линией связи (LTE 5G).
Сигналы управления БПЛА обеспечиваются через линии связи и дополнительно через навигационный приёмник 1. Элементы блок - схемы могут меняться в зависимости от уровня развития искусственного интеллекта, системы связи и развития элементной базы. Работа БПЛА вертикального взлёта и посадки осуществляется следующим образом: БПЛА в режимах подъёма, спуска и зависания работает в режиме многороторного вертолёта – мультикоптера. При этом, вертикальная тяга создаётся при повороте, установленных на концах крыльев 17, на осях 18 прямолинейных элементов19 с движителями 20 с воздушными винтами, горизонтально поверхности земли. Прямолинейные элементы 19 в этом положении фиксируются фиксаторами положения и при создании тяги движителями 20 с воздушными винтами БПЛА отрывается от земли. В этом режиме БПЛА работает в режиме квадрокоптера. При наборе высоты, выше контактной сети, БПЛА переводится в режим самолёта, то есть прямолинейные элементы 19, вращаясь на осях18 занимают вертикальное положение и фиксируются. Движители 20 с воздушными винтами, при работе создают горизонтальную тягу. Дополнительно включается движитель 24 с воздушным винтом, создающим горизонтальную тягу. БПЛА набирая скорость летит впереди поезда обеспечивая мониторинг пути движения поезда. Посадка БПЛА осуществляется при создании вертикальной тяги движителями 20 в режиме квадрокоптера. Зарядка БПЛА осуществляется на пунктах зарядки, рассредоточенных на пути следования или с прицепной зарядной платформы.
Изобретение относится к средствам обеспечения безопасности на железнодорожном транспорте и может быть использовано для определения и идентификации объектов, находящихся на путях следования железнодорожного транспорта и передачи данных для оповещения, при движении на всём пути следования, машиниста поезда и оператору, о наличии препятствий в зоне контроля. Мониторинг производится видеокамерами, работающими в различных частотных диапазонах, установленными на беспилотном летательном аппарате (БПЛА), летящем впереди поезда, со скоростью, равной или превышающей скорость движения поезда. Управление БПЛА осуществляется вычислительным комплексом с искусственным интеллектом, по сигналам, полученным по беспроводной линии связи от датчиков ориентации, установленных на БПЛА. Проводится непрерывный мониторинг состояния железнодорожного пути, с выводом информации в кабину машиниста и оператору центра дистанционного контроля и управления для безопасности всех движущихся средств. 2 н. и 5 з.п. ф-лы, 3 ил., 1 табл.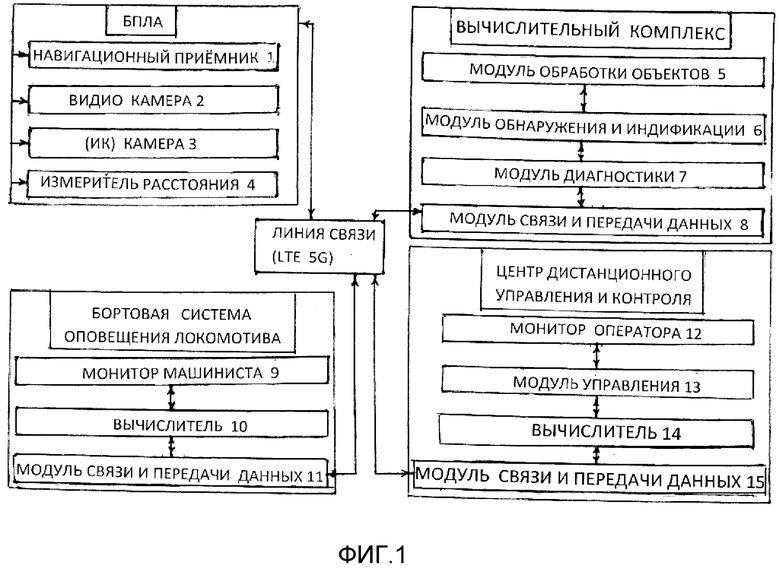
1. Способ мониторинга состояния железнодорожного пути видеокамерами, передающими сигнал по беспроводной линии связи на вычислительный комплекс, бортовую систему оповещения локомотива и центр дистанционного управления и контроля,
отличающийся тем, что мониторинг производится видеокамерами, работающими в различных частотных диапазонах, установленными на беспилотном летательном аппарате, летящем впереди поезда, со скоростью, равной или превышающей скорость движения поезда, а управление беспилотным летательным аппаратом осуществляется вычислительным комплексом с искусственным интеллектом, по сигналам, полученным по беспроводной линии связи от датчиков ориентации, установленных на беспилотном летательном аппарате.
2. Способ мониторинга состояния железнодорожного пути по п.1, отличающийся тем, что мониторинг производится в полёте несколькими беспилотными летательными аппаратами, с электрическими винтомоторными группами, с зарядкой аккумуляторов на дистанции на автоматических пунктах зарядки.
3. Способ мониторинга состояния железнодорожного пути по п.1, отличающийся тем, что мониторинг производится при движении поезда, в полёте несколькими беспилотными летательными аппаратами, с электрическими винтомоторными группами, с зарядкой аккумуляторов на пункте зарядки, установленной на прицепной платформе.
4. Способ обеспечения безопасности при движении поезда по п.1, или 2, или 3, отличающийся тем, что на автоматических пунктах зарядки, зарядка беспилотных летательных аппаратов производится с помощью бесконтактного зарядного устройства.
5. Беспилотный летательный аппарат вертикального взлёта и посадки, применяемый в системе непрерывного мониторинга состояния железнодорожного пути летящим впереди поезда, состоит из летательного аппарата самолётной конструкции, с установленными по концам крыльев вдоль фюзеляжа, на поворотной оси линейными элементами с закреплёнными на концах линейных элементов движителями с воздушными винтами, линейные элементы снабжены фиксаторами положения, при взлёте, посадке и зависании линейные элементы располагаются параллельно земле и движители создают тягу перпендикулярно земле, а в режиме горизонтального полёта линейные элементы располагаются перпендикулярно земле и движители создают тягу параллельно земле, беспилотный летательный аппарат оснащён видеокамерами различных частотных диапазонов и датчиками ориентации, при этом беспилотный летательный аппарат выполнен с возможностью приема сигнала от системы управления, включающей вычислительный комплекс с искусственным интеллектом, пульт управления, расположенный в локомотиве, и пульт управления, расположенный в центре дистанционного управления, а для связи между элементами системы установлены блоки беспроводной линии связи.
6. Беспилотный летательный аппарат вертикального взлёта и посадки, применяемый в системе непрерывного мониторинга состояния железнодорожного пути по п.5, отличающийся тем, что снабжён движителем с воздушным винтом, создающим горизонтальную тягу.
7. Беспилотный летательный аппарат вертикального взлёта и посадки, применяемый в системе непрерывного мониторинга состояния железнодорожного пути по п.5 или 6, отличающийся тем, что беспилотный летательный аппарат выполнен с электрическими движителями с воздушными винтами.
| WO 2019035960 A1, 21.02.2019 | |||
| WO 2020118373 A1, 18.06.2020 | |||
| US 20200095741 А1, 26.03.2020 | |||
| WO 2020107099 A1, 04.06.2020 | |||
| US 20180237086 A1, 23.08.2018 | |||
| US 9718390 B1, 01.08.2017 | |||
| CN 203638093 U, 11.06.2014 | |||
| US 20190127056 А1, 02.05.2019. |

