Настоящее изобретение относится к беспроводной связи. В частности, настоящее изобретение относится к новому и улучшенному способу снижения ранговой оценки канала в системе связи.
Чтобы улучшить качество беспроводной связи, в системах связи часто применяют в передатчике антенные элементы множественного излучения для передачи информации к приемнику. Приемник может тогда иметь одну или более приемных антенн. Желательно множество антенн, т.к. имеется тенденция ограничивать системы беспроводной связи по интерференции, а использование множества антенных элементов снижает межсимвольную интерференцию и интерференцию от соседних каналов, вводимую во время модуляции и передачи радиосигналов, повышая качество связи. Моделирование, а затем проектирование такой системы включает в себя оценивание нескольких параметров пространственно-временного канала или линии между передатчиком и приемником.
Число оцениваемых канальных параметров на пару приемопередающих антенн умножается на число перестановок пар приемопередающих антенн, что создает резко усложняющиеся вычисления и снижает качество оценки. Поэтому желательно иметь способы канальной оценки, которые используют уменьшенный набор параметров. Аналогично, имеется необходимость в улучшенном способе оценки систем радиосвязи со множеством передающих антенн.
Раскрытые здесь варианты осуществления направлены на новые и улучшенные способ и устройство для оценивания канальных параметров в линии связи в системе беспроводной связи со множеством передающих антенн, использующей способ сниженной ранговой оценки. Каждый тракт от передающей антенны к приемнику составляет канал в этой линии. Число каналов, следовательно, увеличивается с ростом числа передающих антенн и приемных антенн. Данный способ использует избыточное и/или априорное знание в системе, чтобы упростить канальную модель, используемую в качестве основы для оценочных вычислений, и чтобы улучшить качество оценки. В одном варианте выполнения ковариационная матрица вычисляется и анализируется для определения того, можно ли снизить число канальных параметров для канальной оценки. Если нет, оцениваются все параметры, в противном случае для вычислений оценок канальных параметров используется канальная модель со сниженным рангом.
В одном аспекте, способ моделирования линии в системе беспроводной связи, которая имеет передатчик с N антеннами и приемник с М антеннами, причем каждый тракт от одной из N передающих антенн к М приемным антеннам составляет канал, включает в себя: определение матрицы, описывающей параметрические соотношения в линии; ранжирование матрицы; определение того, меньше ли этот ранг, чем N×M; если ранг меньше, чем N×M, выполнение выделения подпространства матрицы; выведение канальных импульсных откликов для каждого канала на основании выделенного подпространства матрицы; демодулирование принятого сигнала с помощью канальных импульсных откликов. Матрица может быть ковариационной матрицей, описывающей линию, причем эта ковариационная матрица представляет множество импульсных откликов между передатчиком и приемником. Альтернативно, матрица может быть матрицей отсчетов, описывающих линию.
Далее, определение матрицы может включать в себя оценивание множества параметров, описывающих по меньшей мере один канал. Параметры могут включать в себя расстояние между передающими антеннами. В одном варианте выполнения параметры включают в себя угол передачи по отношению к конфигурации передающих антенн. В альтернативном варианте выполнения матрица описывает параметрические соотношения линии в частотной области.
Далее, ранжирование матрицы может включать в себя определение собственного значения матрицы. В одном варианте выполнения, если ранг равен (N×M), для демодулирования применяется набор коррелированных импульсов. В одном аспекте беспроводное устройство работает для моделирования линии в системе беспроводной связи за счет следующих действий: определение матрицы, описывающей параметрические соотношения линии; ранжирование матрицы; определение того, меньше ли этот ранг, чем N×M; если ранг меньше, чем N×M, то выполнение выделения подпространства матрицы; выведение канальных импульсных откликов для каждого канала на основании выделенного подпространства матрицы; демодулирование принятого сигнала с помощью канальных импульсных откликов.
В другом варианте выполнения устройство беспроводной связи включает в себя: коррелятор, работающий, чтобы оценивать ковариационную матрицу, представляющую линию с передатчиком на основании сигналов, принятых от этого передатчика; блок рангового анализа, связанный с коррелятором и работающий, чтобы оценивать ранг ковариационной матрицы; и блок канальной оценки, связанный с блоком рангового анализа и работающий, чтобы генерировать канальную оценку со сниженным рангом. Ковариационная матрица может представлять множество импульсных откликов между данным устройством и передатчиком. В одном варианте выполнения блок рангового анализа работает, чтобы определять собственное значение, соответствующее ковариационной матрице, и работает, чтобы сравнивать оцененный ранг ковариационной матрицы с заранее заданным полным значением.
В еще одном варианте выполнения способ оценивания линии в системе беспроводной связи включает в себя: оценивание ковариационной матрицы для этой линии; определение того, допускает ли снижение ранг ковариационной матрицы; снижение ранга ковариационной матрицы; оценивание набора импульсных откликов для линии с помощью ковариационной матрицы со сниженным рангом. Кроме того, способ может включать в себя: определение корреляции канала; ранжирование ковариационной матрицы; выполнение выделения матрицы со сниженным рангом из ковариационной матрицы.
В одном варианте выполнения устройство беспроводной связи работает в системе беспроводной связи, имеющей передатчик с N антеннами и приемник с М антеннами, причем каждый тракт от одной из N передающих антенн к М приемным антеннам составляет канал. Устройство включает в себя: первый набор машиночитаемых команд, работающих, чтобы определить ковариационную матрицу, описывающую линию; второй набор машиночитаемых команд, работающих, чтобы ранжировать ковариационную матрицу; третий набор машиночитаемых команд, работающих, чтобы определить, меньше ли этот ранг, чем N×M; четвертый набор машиночитаемых команд, работающих, чтобы выполнять выделение матрицы со сниженным рангом из ковариационной матрицы, если ранг меньше, чем N×M; пятый набор машиночитаемых команд, работающих, чтобы вывести канальные импульсные отклики для каждого канала на основании ковариационной матрицы со сниженным рангом; шестой набор машиночитаемых команд, работающих, чтобы демодулировать принятый сигнал с помощью канальных импульсных откликов. Устройство может далее включать в себя выравниватель, работающий в ответ на шестой набор машиночитаемых команд, при этом конфигурация выравнивателя определяется рангом ковариационной матрицы. В одном варианте выполнения устройство включает в себя седьмой набор машиночитаемых команд, работающих, чтобы вывести коррелированный канальный импульсный отклик.
В еще одном аспекте устройство беспроводной связи включает в себя: средство канальной оценки, работающее, чтобы оценивать ковариационную матрицу, представляющую линию с передатчиком на основании сигналов, принятых от передатчика; блок рангового анализа, связанный с коррелятором и работающий, чтобы оценивать ранг ковариационной матрицы; и средство канальной оценки, связанное с блоком рангового анализа и работающее, чтобы вырабатывать канальную оценку со сниженным рангом.
Далее, в другом аспекте, устройство беспроводной связи включает в себя: коррелятор, работающий, чтобы оценивать ковариационную матрицу, представляющую линию с передатчиком на основании сигналов, принятых от передатчика; блок рангового анализа, связанный с коррелятором и работающий, чтобы оценивать ранг ковариационной матрицы; и средство канальной оценки, связанное с блоком рангового анализа и работающее, чтобы вырабатывать канальную оценку со сниженным рангом.
В еще одном аспекте способ оценивания линии в системе беспроводной связи включает в себя: оценивание ковариационной матрицы для этой линии; определение того, допускает ли снижение ранг ковариационной матрицы; снижение ранга ковариационной матрицы; оценивание набора импульсных откликов для линии с помощью ковариационной матрицы со сниженным рангом. Кроме того, способ может включать в себя: определение корреляции канала; ранжирование ковариационной матрицы; выполнение выделения матрицы со сниженным рангом из ковариационной матрицы.
В другом варианте выполнения беспроводное устройство включает в себя средство канальной оценки, работающее, чтобы определить значимые задержки и определить набор оценок полноразмерных канальных параметров, связанных со значимыми задержками, при этом каждая из набора оценок соответствует моменту времени; средство вычисления собственных значений, работающее, чтобы определять собственные значения набора оценок полноразмерных канальных параметров и найти любые доминантные собственные значения; и средство канальной оценки, работающее, чтобы определять набор оценок канальных параметров со сниженным рангом в ответ на доминантные собственные значения. Далее, устройство может включать в себя средство вычисления собственного вектора, работающее, чтобы определять по меньшей мере один собственный вектор, связанный с одним из доминантных собственных значений набора оценок; при этом средство канальной оценки использует по меньшей мере один собственный вектор, чтобы спроецировать набор оценок полноразмерных канальных параметров на подпространство, охваченное по меньшей мере одним собственным вектором.
Признаки, задачи и преимущества настоящего изобретения станут более понятными из подробного описания, изложенного ниже вместе с чертежами, на которых одинаковые ссылочные позиции отождествляются одинаково.
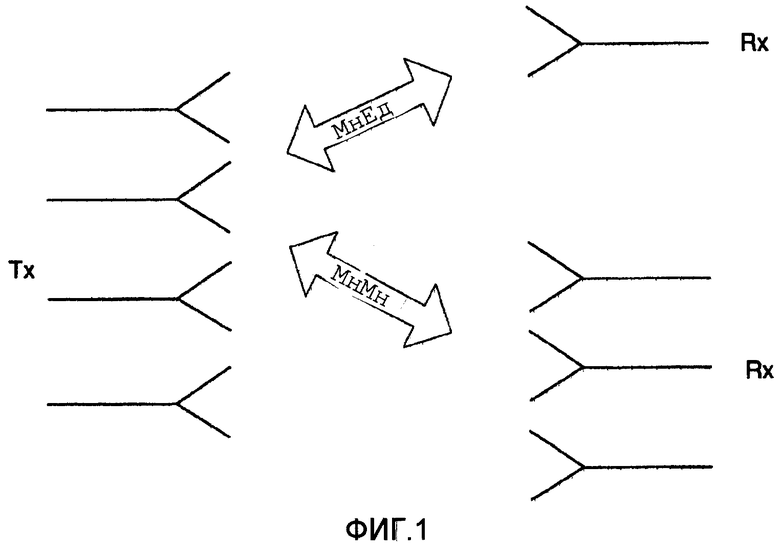
Фиг.1 иллюстрирует конфигурации систем беспроводной связи, включающих в себя множество передающих антенн.
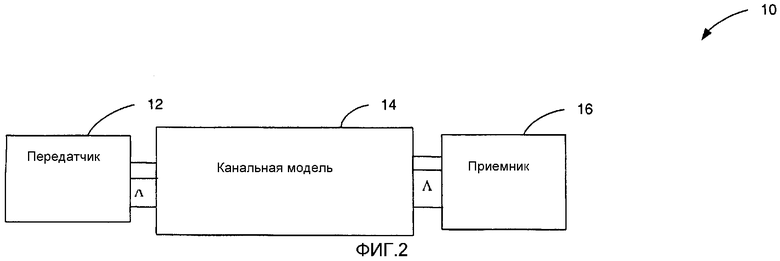
Фиг.2 иллюстрирует модель системы беспроводной связи согласно одному варианту выполнения.
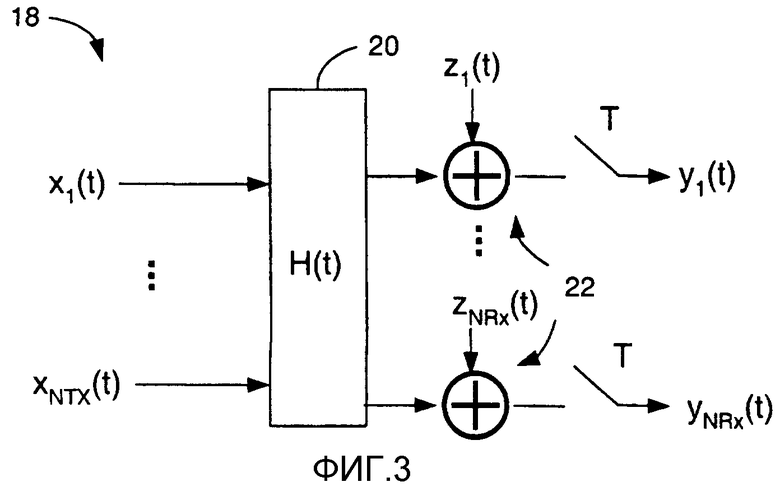
Фиг.3 иллюстрирует модель канала между передатчиком и приемником в системе беспроводной связи.
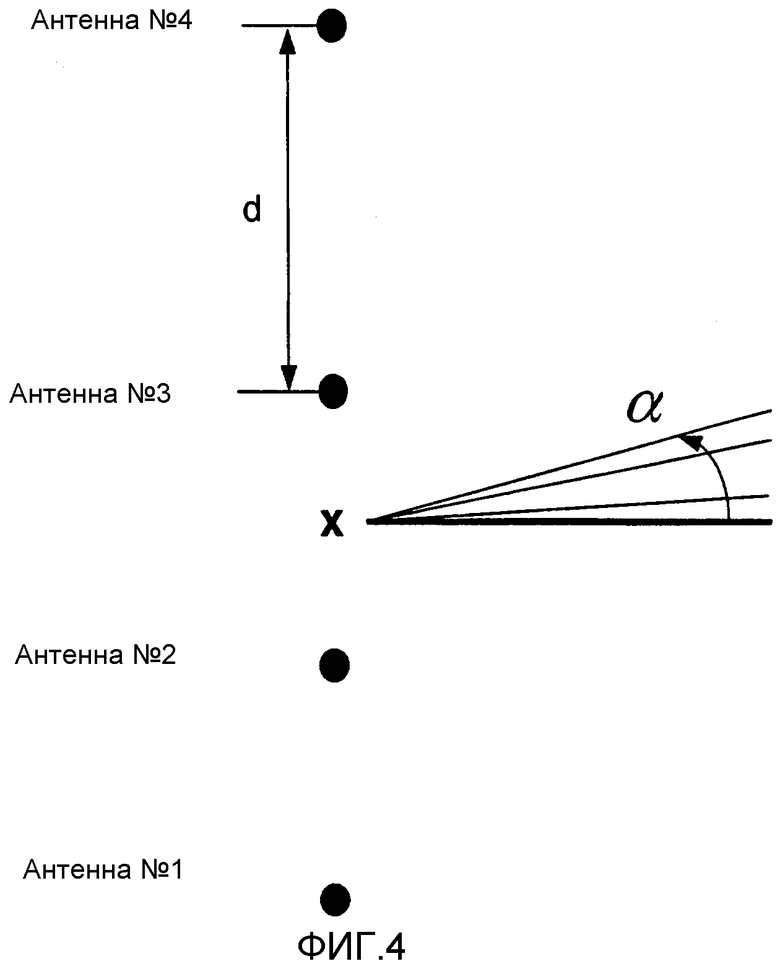
Фиг.4 иллюстрирует физический план антенн в передатчике системы беспроводной связи.
Фиг.5 иллюстрирует блок-схему алгоритма для способа канальной оценки со сниженным рангом для системы беспроводной связи согласно одному варианту выполнения.
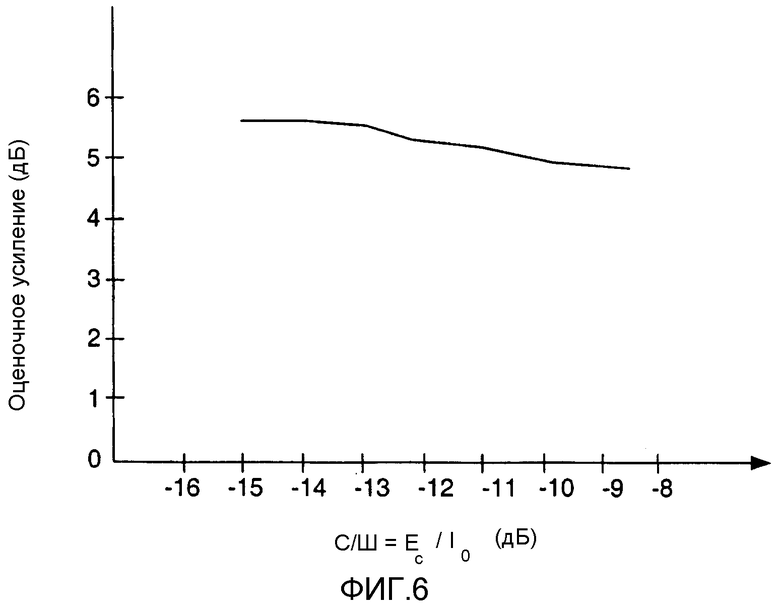
Фиг.6 иллюстрирует график оценочного усиления одного варианта выполнения.
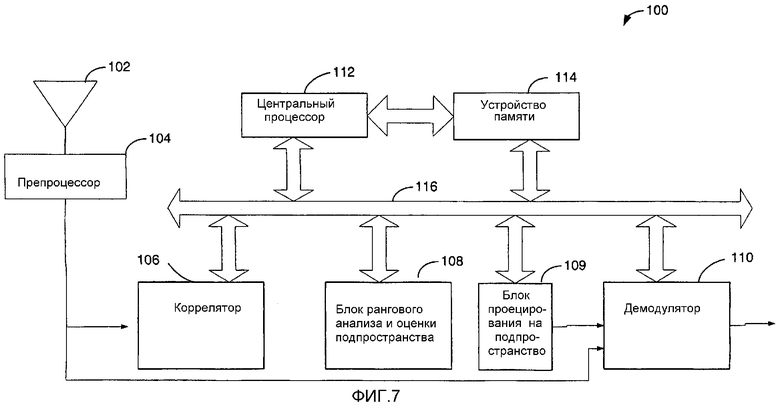
Фиг.7 иллюстрирует конфигурацию системы согласно одному варианту выполнения.
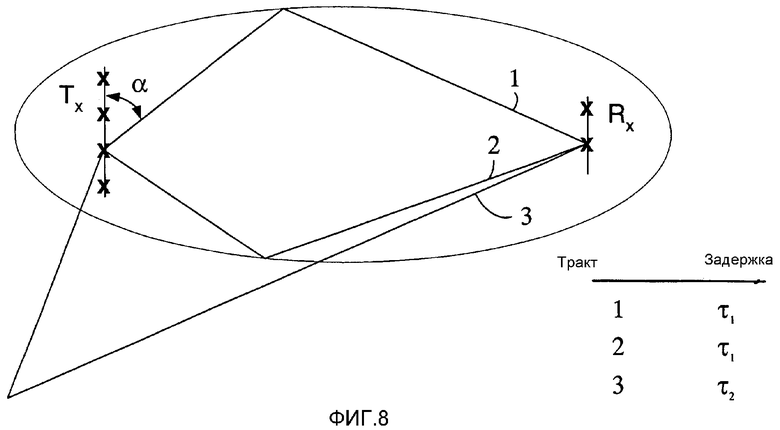
Фиг.8 иллюстрирует примерный вариант выполнения системы беспроводной связи.
В системе беспроводной связи для улучшения качества передачи может использоваться множество излучающих антенн. В конструкции мобильных радиосистем третьего поколения, к примеру, представлены разные методы варьирования передающих антенн. Множество передающих антенн могут использоваться для передачи информации к приемнику с помощью единственной приемной антенны или множества приемных антенн. Система со множеством антенн предлагает улучшение качества. Однако это улучшение зависит от точности канальной модели, используемой в приемнике для демодулирования переданной информации. Моделирование канала передачи использует оценки параметров и определяет для канала эффективный канальный импульсный отклик. Когда используется множество антенн, моделирование включает в себя оценки каждого канала передачи для всех пар приемопередающих антенн.
Канал передачи от передатчика к приемнику представляет собой пространственно-временной канал, описываемый в общем случае по меньшей мере одним импульсным откликом. Часто канальные параметры от одного канала к другому меняются мало, как если бы канальные импульсные отклики отличались только фазой. В таком случае, может быть не нужно выводить оценки импульсных откликов независимо для каждого канала, а вместо этого можно повторно использовать некоторую информацию. Когда каналы коррелированы, можно использовать представление каналов со сниженным рангом. Сниженным рангом называется сниженное число полностью некоррелированных каналов, используемых, чтобы описать линию между передатчиком и приемником. Один способ рассмотреть этот сниженный ранг состоит в снижении ранга канальной ковариационной матрицы, используемой для описания взаимных статистических зависимостей различных канальных импульсных откликов. Отметим, что сниженный ранг можно также реализовать другими измерениями параметров. К примеру, в одном варианте выполнения матрица отсчетов формируется из столбцов, содержащих отсчеты оценок канальных импульсных откликов во времени, при этом сниженный ранг строк такой матрицы отсчетов применяется, как описано здесь. Снижение ранга может выразиться в менее сложном фильтре или демодуляторе, т.е. снизить число фильтров, и/или фильтровых элементов, и/или блоков демодуляции, используемых в приемнике. Более того, снижение числа оцененных параметров, используемых, чтобы характеризовать канал, ведет к повышенной точности канальной модели.
Фиг.1 иллюстрирует конфигурации систем беспроводной связи со множеством передающих антенн Тх. Показаны два тракта: первый тракт "множественный вход - множественный выход" (МнМн) (MIMO) и второй тракт "множественный вход - единственный выход" (МнЕд) (MISO). Конфигурация МнЕд устанавливает множество антенн Тх в связь с единственной антенной Rx. Конфигурация МнМн расширяет это до множества антенн Rx. Канальная модель для одной из систем по фиг.1 иллюстрируется на фиг.2 в соответствии с одним вариантом выполнения, - конкретно, для беспроводной системы, применяющей когерентную демодуляцию, имеющей линию связи между передатчиком и приемником, при этом по меньшей мере передатчик применяет множество антенн. Система 10 беспроводной связи включает в себя передатчик 12 и приемник 16, которые осуществляют связь по эфирному интерфейсу. Канальная модель 14 представляет каналы для пар антенн между передатчиком 12 и приемником 16. Канальная модель 14 рассматривает каналы в линии, такой как линия МнЕд на фиг.1.
Продолжая рассматривать фиг.2, пусть NTx - число антенн, используемых в передатчике 12, а NRx - число антенн в приемнике 16, соответственно. В общем случае, для каждой значимой задержки в распространении между передатчиком и приемником (NTx·NRx) каналы передачи существуют для этой пары, при этом для значимой задержки в распространении принятые сигналы с высокой достоверностью похожи на переданные известные сигналы. Иными словами, определяет NE как число значимых задержек в распространении, называемых также эхо. (NTx·NRx·NE) отсчетов канальных импульсных откликов оцениваются затем, чтобы выполнить когерентную демодуляцию. Когда каналы некоррелированы, (NTx·NRx·NE) отсчетов канальных импульсных откликов моделируются как полностью некоррелированные случайные процессы, и оценки этих отсчетов канальных импульсных откликов могут выводиться независимо без потери в характеристиках демодуляции. Однако, если (NTx·NRx·NE) отсчетов канальных импульсных откликов не являются некоррелированными случайными процессами, эти отсчеты (NTx·NRx·NE) канальных импульсных откликов можно моделировать как линейную комбинацию меньшего числа NCh отсчетов канальных импульсных откликов, причем NCh<(NTx·NRx·NE). Такие случаи включают в себя - но не ограничиваются ими - минимальное угловое рассеивание в передатчике и/или приемнике в эффективных каналах вследствие условий распространения. Если NCh известно или оценено, а линейное преобразование NCh отсчетов канальных импульсных откликов разлагается в (NTx·NRx·NE) отсчетов канальных импульсных откликов, то моделирование можно осуществить с NCh оценками отсчетов канальных импульсных откликов. Это снижает число параметров, подлежащих оцениванию, увеличивая качество оценивания, что приводит к увеличению характеристик демодуляции. Даже если точное представление линейного преобразования NCh отсчетов канальных импульсных откликов в соответствующие (NTx·NRx·NE) отсчетов канальных импульсных откликов неизвестно, моделирование все же можно осуществить с оценками NCh отсчетов канальных импульсных откликов, если подпространство, охваченное векторами этого линейного преобразования, известно или может быть оценено.
Этот принцип называется "канальная оценка со сниженным рангом". Преобразование NCh некоррелированных канальных импульсных откликов в (NTx·NRx·NE) коррелированных канальных импульсных откликов может зависеть от факторов, включающих в себя - но не ограниченных ими - конфигурации антенн, комбинации антенн, поляризационные характеристики, условия распространения и т.д. В некоторых случаях преобразование может быть известно заранее, в других случаях его можно вывести или оценить, например, оценкой угла прихода. Подпространство, охваченное линейным преобразованием NCh отсчетов канальных импульсных откликов в соответствующие (NTx·NRx·NE) отсчетов канальных импульсных откликов, можно определять оцениванием ранга собственных значений (NTx·NRx·NE)-мерной ковариационной матрицы (NTx·NRx·NE) отсчетов канальных импульсных откликов. Это подпространство можно также определить использованием единственного разложения значений матрицы, содержащей столбцы со всеми (NTx·NRx·NE) оценками отсчетов канальных импульсных откликов для разных моментов времени. Отметим, что если отсчеты канальных импульсных откликов искажены известным корреляционным шумом и если эту шумовую корреляцию можно оценить, (NTx·NRx·NE) отсчетов канальных импульсных откликов можно сначала отфильтровать декоррелирующим шум фильтром.
В одном варианте выполнения снижающее ранг преобразование известно заранее или оценивается. Иными словами, возможно установить отображение NCh каналов в (NTx·NRx) каналы. Затем канал со сниженным рангом оценивается с помощью установленного преобразования. При желании эквивалентную полноразмерную канальную модель можно вывести затем из оценки со сниженным рангом путем преобразования оценки со сниженным рангом обратно в более высокую размерность.
В альтернативном варианте выполнения снижающее ранг преобразование не известно в явном виде, но подпространство, охваченное этим преобразованием, может быть выделено из доминантных собственных векторов канальной ковариационной матрицы. Отметим, что это подпространство можно назвать сигнальным подпространством или канальным подпространством. Этот процесс включает в себя первое оценивание канальной ковариационной матрицы и нахождение доминантных собственных значений. Путем определения связанных собственных значений, которые охватывают канальное подпространство, процесс проецирует обычную канальную оценку в канальное подпространство, что приводит к канальной модели со сниженным рангом при сниженных ошибках оценки. Если желательно, модель со сниженным рангом может быть преобразована обратно в эквивалентную полноразмерную канальную модель.
Фиг.3 иллюстрирует модель 18 канала МнМн для непрерывного времени, имеющего линейный фильтр 20 МнМн с NTx входами и NRx выходами. Линейный фильтр 20 МнМн определяется матрицей H(t) размером NTx×NRx, состоящей из линейных функций hij(t), i=1...NTx, j=1...NRx. В общем случае hij(t), i=1...NTx, j=1...NRx являются неизвестными линейными функциями. Линейный фильтр 20 МнМн представляет (NTx·NRx) радиоканалов, через которые NTx переданных сигналов проходят к NRx приемным антеннам. Эти радиоканалы характеризуются их канальными импульсными откликами hij(t), i=1...NTx, j=1...NRx. Входной сигнал x(t) для модели представляет собой вектор столбца (NTx×1), представляющий NTx ограниченных по полосе передаваемых сигналов, а выходной сигнал y(t) для модели является вектором столбца (NRx×1), дискретизированного в моменты t=T, 2T..., как показано ключом Т, когда ширина полосы передаваемого сигнала меньше или равна 1/Т. Принятые сигналы содержат дополнительные сигналы возмущений, представленные вектором z(t) столбца NRx×1, введенным вследствие шума или интерференции от соседнего канала. Дополнительные сигналы возмущений суммируются в узлах 22 суммирования. Отношение между входными сигналами x(t), каналами H(t), возмущением z(t) и выходными сигналами y(t) задается уравнением:

где * означает свертку.
Фиг.4 иллюстрирует физическую конфигурацию антенн в передатчике примерного варианта выполнения, смоделированного, как на фиг.2. Способ сниженного ранга применяется, чтобы оценивать линию, представленную канальной моделью 14 и имеющую передатчик 12, выполненный с четырьмя (4) антеннами, разнесенными каждая на расстояние "d". Конкретика конфигурации и модели обсуждаются здесь ниже. Отметим, что процедура оценки выполняется в приемнике 16. Опорное направление задается горизонтальной линией. Углы передачи измеряются относительно этого опорного направления. Угол "α" соответствует углу тракта распространения по отношению к этой опоре в двумерной плоскости, как иллюстрируется. Показан также диапазон углов по отношению к опорному направлению. Для оценки линии в приемнике 16 в системе 10 используется следующий способ.
Фиг.5 иллюстрирует блок-схему алгоритма примерного способа канальной оценки, используемого для обработки сигналов в блоке приемника в соответствии с одним вариантом выполнения. Процесс начинается поиском значимых задержек распространения в канале, т.е. поиском значимых эхо на шаге 40. В одном варианте выполнения процесс включает в себя скользящую корреляцию принятых сигналов с известными переданными сигналами или известными компонентами переданных сигналов. Корреляцией называется степень, в которой принятые сигналы соотносятся с известными переданными сигналами, при этом полная корреляция подтверждает с высоким доверием соответствие между этими сигналами. Для сдвинутых во времени сигналов, когда для сдвига принятых сигналов во времени используются скользящие задержки, результирующая скользящая корреляция предоставляет степень определенности, с которой сдвинутые во времени сигналы похожи на известные переданные сигналы. Таким образом, в контексте беспроводной системы скользящая корреляция относится к синхронизации известных сигналов, переданных Тх антеннами, со сдвинутыми во времени вариантами принятых сигналов. Примерный вариант выполнения канальной оценки со сниженным рангом использует скользящую корреляцию принятых сигналов с известными переданными сигналами, чтобы оценить число NE и значения τ1, τ2, К, τNe значимых задержек распространения, т.е. задержек, для которых принятые сигналы, сдвинутые назад во времени этими задержками, похожи на известные переданные сигналы с большой определенностью. Процедура скользящей корреляции для нахождения значимых задержек распространения в системах МДКР известна также как "поиск".
Способ затем на шаге 42 оценивает параметры для множества обозримых каналов между NTx передающими антеннами и NRx приемными антеннами. Каналы представляют собой пары соединений радиосети, связывающие по меньшей мере часть от NTx передающих антенн с по меньшей мере частью от NRx приемных антенн. В примерном варианте выполнения имеется соединение между каждой антенной передатчика 12 и каждой антенной приемника 16, что дает (NTx·NRx) каналов. Параметрами, описывающими множество каналов, являются те характеристики, которые влияют на импульсные отклики каналов. В предположении, что между передатчиком и приемником существует NE значимых задержек распространения (эхо), в качестве набора параметров, описывающих множество каналов, могут использоваться (NTx·NRx·NE) комплексных отсчетов (NTx·Nrx) канальных импульсных откликов. Этот набор параметров обозначается вектором ((NTx·NRx·NE)×1), выраженным здесь как h. Соотношение между x(t), h, z(t) и y(t) раскрывается ниже.
Когда τ1, τ2, К, τNe являются значимыми задержками распространения между передатчиком и приемником, модель, описываемая уравнением (1), может быть выражена как

Это можно преобразовать в

где ⊗ означает произведение кронекеровых тензоров, I(NRx) есть матрица идентичности размером (Nrx×Nrx), а вектор h получается из матрицы H(t) так, что поддерживается

Вектор htotal(τe) размером ((NTx·NRx)×1) состоит из элементов матрицы H(t), взятых в качестве отсчетов в момент τe, со всеми столбцами H(τe), расположенными на верху друг друга в векторе htotal(τe), что обозначается оператором vect{H(τe)} в уравнении (5), т.е. htotal(τe) задается уравнением
Поскольку выходные сигналы y(t) дискретизируются с частотой дискретизации 1/Т, векторы, содержащие дискретные по времени отсчеты, могут представлять сегменты конечной длительности непрерывных по времени сигналов. Для простоты принятые сигналы y(t) описываются здесь дискретным во времени представлением на конечном интервале времени t=0, T, K, (NT-1)T, где NT есть число отсчетов, взятых по времени. Поэтому используются нижеследующие аббревиатуры. Каждый дискретный во времени переданный сигнал в антенне n, задержанный на τ, задается вектором

При этом матрица, описывающая все дискретные во времени переданные сигналы, задержанные на τ, задается уравнением

Матрица А описывает все дискретные во времени переданные сигналы, имеющие значимые задержки.

Вектор, описывающий каждый дискретный во времени сигнал возмущений в антенне n, задается уравнением

а вектор всех дискретных во времени сигналов возмущений задается уравнением

Вектор дискретного во времени принятого сигнала в антенне n задается уравнением

а вектор всех дискретных во времени принятых сигналов задается уравнением

Используя приведенные выше аббревиатуры, дискретный во времени выходной сигнал показанной на фиг.3 модели 18 канала МнМн по периоду времени от t=0, T, K, (NT-1)T, может быть сведен к простой модели

Второй шаг в блок-схеме алгоритма по фиг.5 на шаге 42 состоит в том, чтобы неоднократно обрабатывать оценки для набора параметров, характеризующих множество каналов между передатчиком и приемником. Для вышеописанного математического представления канальной модели это может быть эквивалентно обрабатывающим оценкам h(n), n=1K Nh вектора h в уравнении (14) для Nh различных точек во времени. Обычная модель использует корреляцию принятых сигналов, сдвинутых назад во времени за определенные задержки, с известными переданными сигналами, такими как пилот-сигналы, конкретные для передающих антенн, или заранее заданные обучающие последовательности. Когда значимые задержки τ1, τ2, К, τNe уже определены на шаге 40, примерный вариант выполнения канальной оценки со сниженным рангом использует корреляцию известных переданных сигналов с вариантами принятых сигналов, сдвинутых назад во времени на τ1, τ2, К, τNe, чтобы выработать канальную модель, такую как канальная модель 14 на фиг.2, характеризуемую вектором h. Если шумовой вектор h представляет пространственные и временные возмущения типа белый шум, причем шумовая ковариационная матрица задается выражением Rn=〈nnН〉=σ2·I(NRx·NRт), и если матрица А состоит из заранее известных сигналов, таких как пилот-символы системы МДКР, канальные оценки, полученные корреляцией, могут быть описаны как

Если шумовой вектор h не представляет пространственного и временного возмущения типа белый шум, канальные оценки, полученные корреляцией, могут быть описаны как

Отметим, что Rn может быть известно заранее или может оцениваться из принятых сигналов. Канальная оценка уравнения (16) содержит вектор AHRn -1h с ковариационной матрицей Rp=AHRn -1A. Эта ковариационная матрица в общем случае не является диагональной, т.е. компоненты вектора возмущения, содержащиеся в h, в общем случае коррелированы. Если Rp известно или может быть оценено, компоненты вектора возмущения, содержащегося в h, могут быть декоррелированы посредством преобразования h с помощью Rp -1/2. Это предполагается в нижеследующем, причем поддерживается

Как показано на фиг.5, ковариационная матрица канальных параметров оценивается на шаге 44. Ковариация измеряет расхождение одной случайной переменной по отношению к другой. В данном случае ковариационная матрица описывает расхождение разных канальных параметров по отношению друг к другу. Согласно вышеописанному математическому представлению канальной модели шаг 44 соответствует обработке оценки Rh ковариационной матрицы Rh=〈h·hH〉. Такая оценка может задаваться уравнением

Если канал МнМн имеет сниженный ранг, причем NCh<(NTx·NRx·NE), то (NTx·NRx·NE) отсчетов импульсных откликов канала МнМн можно описать как линейную комбинацию из NCh некоррелированных отсчетов канальных импульсных откликов. Канальный вектор h может моделироваться как линейное преобразование канального вектора g сниженной размерности, причем

и при этом В есть матрица размером ((NTx·NRx·NE)×NCh), описывающая это линейное преобразование. Как задано выше, вектор g есть вектор размером (NCh×1) с некоррелированными компонентами, т.е. Rg=〈g·gH〉 является диагональной матрицей размера (NCh×NCh). В этом случае канальная ковариационная матрица задается уравнением

Как следствие, ранг канальной ковариационной матрицы Rh равен NCh. При заданном (20) и в предположении, что корреляция согласно (17) используется для того, чтобы вывести оценки h канальных импульсных откликов, ковариационная матрица вектора h задается уравнением

Вследствие сниженного ранга NCh матрицы Rh декомпозиция собственных значений

дает только NCh ненулевых собственных значений, причем Δ есть диагональная матрица, содержащая собственные значения, а Е есть квадратная матрица, содержащая собственные значения Rp 1/2H B·Rg·BH Rp 1/2. При (21) и (22) оценка Rh ковариационной матрицы может быть выражена так

т.е. Rh разделяет собственные значения с Rp 1/2H B·Rg·BH Rp 1/2. Поскольку Λ является диагональной матрицей только с NCh ненулевых элементов, (NTx·NRx·NE) - NCh собственных значений в оценке Rh постоянны, а NCh собственных значений в оценке Rh больше, чем предыдущие. Эти большие собственные значения называются доминантными собственными значениями в результате. При диагональной матрице ΛС, содержащей все доминантные собственные значения ковариационной матрицы оцениваемого канала, матрице ЕС, содержащей соответствующие собственные векторы, и при матрице EN, содержащей оставшиеся собственные векторы, (23) становится

Поэтому матрица ЕС содержит собственные векторы, охватывающие канальное или сигнальное подпространство.
Оцениваемая ковариационная матрица Rh ранжируется затем на шаге 46, что означает, что оценивается число доминантных собственных векторов. Этот ранг сравнивается с максимальным значением "МАХ" на шаге 48. Значение МАХ равно общему числу оцененных канальных параметров в векторе h. Иными словами, МАХ равно (NTx·NRx·NE). Поскольку многие механизмы, влияющие на корреляцию, такие как направленность трактов распространения, не изменяются быстро во времени, корреляционные характеристики могут быть оценены путем усреднения по достаточно длинным временным интервалам по сравнению с обратной величиной от частоты фединга в канале(-ах).
Ранг ковариационной матрицы определяет, могут ли (NTx·NRx·NE) канальных параметров, описывающих (NTx·NRx) существующих каналов передачи, моделироваться как линейная комбинация меньшего числа NCh эквивалентных некоррелированных канальных параметров. Если сниженный ранг доступен, канальное подпространство ЕС оцениваемой ковариационной матрицы Rh выводится на шаге 52. Отметим, что вместо использования оцениваемой ковариационной матрицы Rh ранг Rh и канальное подпространство ЕС также могут выводиться из матрицы оценок канальных параметров

с помощью декомпозиции сингулярных значений.
При канальном подпространстве ЕС векторы канальных параметров сниженной размерности оцениваются на шаге 54 согласно

эффективно проецируя исходно оцененные канальные параметры в канальное подпространство. Это проецирование в канальное подпространство снижает ошибку оценки. Если в приемнике используется демодулятор пониженной сложности, который использует канал сниженного ранга, т.е. учитывает при демодуляции только сниженное число канальных параметров, оценки (26) могут быть непосредственно использованы в демодуляторе для когерентной демодуляции. Иными словами, обработка перейдет от шага 54 прямо к шагу 58, либо, как минимум, шаг 58 будет использовать оценки со сниженным рангом.
Если должен использоваться обычный приемник, спроектированный для полноранговой канальной модели, оценки g(n) можно преобразовать назад в полноразмерное пространство на шаге 56 согласно

причем коэффициент Rp -1/2H используется, чтобы сделать оценку несмещенной. Отметим, что оценка канального подпространства ЕС может обновляться непрерывно за счет использования скользящего временного окна для оценок Rh или Xh соответственно. Это исключает задержки ожидания нового полного набора отсчетов путем использования части предыдущего набора отсчетов с инкрементно сдвинутыми во времени новыми значениями.
Если снижение ранга невозможно, обработка продолжается, чтобы использовать полный ранг системы для моделирования канала на шаге 50. В этом случае способ оценивает (NTx·NRx·NE) канальных параметров независимо друг от друга. Когда система смоделирована, демодуляция сигнала продолжается на шаге 58.
Показанный на фиг.1 тракт МнЕд предлагается как примерный вариант выполнения. Как показано, передатчик Тх имеет четыре (4) излучающих антенны (NTx=4), а приемник Rx имеет одну (1) антенну (NRx=1). Для простоты, несколько предположений позволяют проводить прямой анализ, демонстрирующий применимость примерного варианта выполнения для моделирования системы, показанной на фиг.1. Во-первых, этот пример предполагает, что каждая антенна передатчика передает пилот-сигнал, специфичный для этой антенны, при этом специфичный для антенны пилот-сигнал совмещен во времени и ортогонален пилот-сигналам остальных антенн передатчика.
Во-вторых, предположим, что каналы являются не селективными по частоте фединговыми каналами, каждый из которых состоит из большого числа Р радиосетевых трактов. Эти тракты имеют каждый приблизительно одну и ту же длину пробега и одно и то же затухание. Второе предположение гарантирует, что относительная задержка распространения меньше, чем обратная величина полосы пропускания передачи. Задержка распространения двух радиотрактов, как правило, обусловлена различиями в длине пробега.
В-третьих, канальная модель ограничивается двумерным распространением, т.е. все эффективные радиотракты расположены в двумерной плоскости. См. фиг.4. В дополнение к этому предполагается, что геометрия эффективных радиотрактов в передатчике не зависит от времени, при этом угол выхода каждого тракта, измеренный относительно опорного направления передатчика, сосредотачивается вокруг среднего угла  . Углы радиотрактов имеют распределение Гаусса со средним значением
. Углы радиотрактов имеют распределение Гаусса со средним значением  и стандартным отклонением σ. Для одного моделирования выбирается случайным образом между -60 и +60 градусами. Предполагается, что стандартное отклонение σ равно корню квадратному из двух градусов. В-четвертых, тракты прибытия в приемнике предполагаются равномерно распределенными между 0 и 360 градусами, чтобы принять во внимание локальное рассеяние. В-пятых, не существует линий прямой видимости.
и стандартным отклонением σ. Для одного моделирования выбирается случайным образом между -60 и +60 градусами. Предполагается, что стандартное отклонение σ равно корню квадратному из двух градусов. В-четвертых, тракты прибытия в приемнике предполагаются равномерно распределенными между 0 и 360 градусами, чтобы принять во внимание локальное рассеяние. В-пятых, не существует линий прямой видимости.
В-шестых, предположим конкретный фазовый и доплеровский сдвиг для каждого тракта. Специфичная для тракта фаза выбирается случайным образом согласно равномерному распределению между 0 и 2π. Вдобавок, специфичная для тракта фаза регулируется для каждой антенны передатчика согласно геометрической конфигурации антенн, местоположению антенн по отношению к опорной точке. Для регулировки фазы предположим, что рассеяние объекта рассматривается в дальней зоне. Специфичные для канала доплеровские сдвиги вырабатываются согласно равномерному распределению углов трактов прихода в приемнике, несущей частоте и заранее заданной скорости приемника. В примерном варианте выполнения несущая частота предполагается равной 1,8 ГГц, а скорость приемника равна 60 км/час, что дает в результате максимальный доплеровский сдвиг 100 Гц. В примерном варианте выполнения каждая антенна передатчика покрывает сектор в 120 градусов при том, что все диаграммы направленности антенн ориентированы на α=0.
При заданной так подробно примерной системе применение процесса по фиг.5 обеспечивает канальную модель, имеющую временное расхождение согласно классическому доплеровскому спектру. Можно рассматривать специфичную для антенны диаграмму направленности излучения. При этой канальной модели канальные импульсные отклики для каналов, видных через различные передающие антенны, могут вырабатываться с помощью одного и того же набора радиотрактов, вводя тем самым действительную корреляцию в фединг различных каналов.
На принимающей стороне эфирного интерфейса в единичной антенне приемника данный способ выводит оценку импульсного отклика для каждого из четырех каналов передачи, т.е. для четырех радиосетевых соединений между передающими антеннами и приемной антенной. Эта оценка основывается на предварительном знании расширяющих кодов, используемых для генерирования специфичных для антенны пилот-сигналов, связанных с каждой антенной передатчика.
Возвращаясь к фиг.4, в географической конфигурации антенн в передатчике антенны располагаются в линию с постоянным разнесением d между соседними антеннами, причем d=λ, т.е. антенны разнесены на одну длину волны. Отметим, что приемник имеет единственную всенаправленную антенну. Полное число эффективных радиотрактов считается равным Р=50. Конкретные канальные переменные αр, fp и Фр представляют, соответственно, угол, измеренный от опорной линии, доплеровский сдвиг и фазу. Уравнение, описывающее канальный импульсный отклик для канала между передающей антенной n и приемной антенной, задается так:

причем gn(α) представляет собой специфичную для антенны комплексную диаграмму направленности азимутального излучения каждой передающей антенны.
Если канал не имеет угловой расходимости и все специфичные для тракта углы αр равны , канальный импульсный отклик для каждой передающей антенны задается как

где h(t) является эквивалентным канальным импульсным откликом для эквивалентной всенаправленной антенны передатчика в опорной точке.
В этом случае канальные импульсные отклики для различных антенн передатчика различаются только комплексным коэффициентом, т.е. каналы полностью коррелированы. Тогда управляющий вектор определяется как
а вектор канальных импульсных откликов - как
Четыре (4) канальных импульсных отклика от антенн передатчика Тх являются тогда копиями канального импульсного отклика h(t), взвешенными четырьмя комплексными коэффициентами, что означает, что вектор h(t) является линейным преобразованием скаляра h(t), заданного уравнением

т.е. вектор g в линейном преобразовании (19) равен в этом примере скаляру h(t), а матрица В равна вектору  . Это означает, что канальная ковариационная матрица Rh=〈h·hH〉 равна
. Это означает, что канальная ковариационная матрица Rh=〈h·hH〉 равна  в данном примере. Если управляющий вектор известен, например, из априорного знания конфигурации антенн и направления
в данном примере. Если управляющий вектор известен, например, из априорного знания конфигурации антенн и направления  радиотракта, достаточно оценить скаляр h(t) и либо вычислить оценку h(t) с помощью линейного преобразования , либо использовать оценку h(t) и непосредственно для демодуляции.
радиотракта, достаточно оценить скаляр h(t) и либо вычислить оценку h(t) с помощью линейного преобразования , либо использовать оценку h(t) и непосредственно для демодуляции.
Отметим, что для случая, когда известно, может быть достаточно оценить h(t), а затем вычислить оценку вектора h(t) из скалярной оценки h(t). Если демодулятор спроектирован так, что канал состоит из единственного скаляра, т.е. демодуляция учитывает , то возможно демодулировать с помощью и скалярного канала.
Специфичные для антенны пилот-сигналы в передатчике обозначаются xn(t), n=1K NTx, и определяется соотношение

Пилот-сигналы состоят из сегментов, имеющих каждый длительность TS, называемую длительностью пилотного символа, при этом справедливо нижеследующее:

Пилотный вектор определяется как
а принятый шумовой сигнал z(t) представляет белый гауссов шум. Сигнал, принятый антенной приемника Rx, описывается как

Обычно коррелирование принятого сигнала с четырьмя (4) пилотными последовательностями выводит набор из четырех (4) канальных оценок. Поскольку пилот-сигналы ортогональны на периоде пилотного символа, это оценивание затем повторяется с частотой пилотных символов. Такая процедура корреляции в общем случае называется "интегрирование и сброс" и может быть выражена как

причем hconv (n) есть вектор, составленный из обычных, т.е. интегрированных и сброшенных канальных оценок, выведенных из n-го пилот-сигнала. Если уравнение (34) преобразуется в дискретное временное представление путем помещения NT=TS/T отсчетов пилот-сигналов xn(t) в столбцы матрицы А, NT отсчетов шумового сигнала z(t) - в вектор h, и NT отсчетов принятого сигнала y(t) - в вектор r, уравнение (34) даст

Тогда дискретное временное представление уравнения (37) есть
Если канальные изменения в одном пилот-сигнале пренебрежимы, уравнение (39) становится таким:

Учитывая линейное преобразование h(t), принятый сигнал выражается как

Из этого оценка скаляра h(t) выводится как
Опять-таки, когда канальные изменения в одном пилот-сигнале игнорируются, уравнение (13) становится таким

Из этой скалярной оценки с помощью линейного преобразования вырабатывается новая оценка канального импульсного вектора

При игнорировании канальных изменений в одном пилот-сигнале уравнение (44) станет таким

Если неизвестно заранее, оно может быть оценено с помощью ковариационной матрицы, заданной уравнением

где Ph есть средняя мощность скалярного канального импульсного отклика h(t). Ковариационная матрица Rh может быть аппроксимирована

что усредняет вектор с обычными оценками канальных импульсных откликов по числу Nsym пилотных символов.
Для случая без шума и при равной нулю угловой расходимости Rh есть ранг один (1), а вектор охватывает Rh. Таким образом, уравнение (47) понижается до

Отметим, что нормированный вектор  охватывает Rn.
охватывает Rn.
Для шумового случая с достаточно низкой шумовой мощностью и достаточно низкой угловой расходимости Rh все еще имеет одно доминирующее собственное значение. Поэтому процесс выполняет декомпозицию собственных значений Rh. Когда одно собственное значение намного больше всех остальных собственных значений, это является индикацией того, что угловая расходимость вокруг была достаточно малой. Поэтому, раз νmax является собственным вектором, соответствующим наибольшему собственному значению Rh, аппроксимация становится такой:

Отметим, что вектор νmax в данном примере равен канальному подпространству ЕС. В общем случае, оценка Rh используется, чтобы определить, можно ли понизить ранг ковариационной матрицы канальных оценок. Если Rh является полным рангом, проблема канальных оценок не снижается до меньшей размерности.
Согласно примерному варианту выполнения ортогональные пилот-сигналы двоичных элементарных посылок имеют скорость 1,2288 Мэлементов/сек и длительность пилотных символов 64 элемента. При такой канальной модели принятый сигнал, включающий белый гауссов шум, генерируется для 4000 следующих друг за другом пилотных символов, имеющих пилотное отношение сигнал/шум (С/Ш). Из этого принятого сигнала вырабатываются 4000 обычных векторных оценок hconv (n). Выработанная таким образом ковариационная матрица Rh усредняется по этим 4000 следующих друг за другом обычных канальных оценок. В примерном варианте выполнения процесс занимает приблизительно 208,3 мс. После выделения собственного вектора, соответствующего максимальному собственному значению матрицы Rh, вычисляется матрица Ra. Вслед за этим 4000 новых векторных оценок hnew (n) вырабатываются согласно уравнению

Используя примерный вариант выполнения итерации, повторяются Nexp=50 раз. По 50 итерациям углы передатчика меняются так, что  равномерно распределено в (+/-60) градусах при том, что угловая расходимость остается постоянной со стандартным отклонением, равным корню квадратному из двух (√2) градусов. Вдобавок, канальные параметры для заданного пилотного С/Ш изменяются. Эти изменяемые параметры представляют направление(-я) радиотракта, специфичную для тракта фазу и специфичный для тракта доплеровский сдвиг для определенного пилотного С/Ш. Для разных значений пилотного С/Ш выполняется одинаковое число итераций. Сравнение качества набора обычных оценок с набором новых векторных оценок по отношению к сниженному коэффициенту среднеквадратической ошибки оценки, т.е. усредненной по времени и итерациям, делается с помощью оценочного усиления, заданного уравнением
равномерно распределено в (+/-60) градусах при том, что угловая расходимость остается постоянной со стандартным отклонением, равным корню квадратному из двух (√2) градусов. Вдобавок, канальные параметры для заданного пилотного С/Ш изменяются. Эти изменяемые параметры представляют направление(-я) радиотракта, специфичную для тракта фазу и специфичный для тракта доплеровский сдвиг для определенного пилотного С/Ш. Для разных значений пилотного С/Ш выполняется одинаковое число итераций. Сравнение качества набора обычных оценок с набором новых векторных оценок по отношению к сниженному коэффициенту среднеквадратической ошибки оценки, т.е. усредненной по времени и итерациям, делается с помощью оценочного усиления, заданного уравнением
Для примерного варианта выполнения фиг.6 иллюстрирует оценочное усиление в дБ в зависимости от пилотного С/Ш. При этом пилотное С/Ш определяется как отношение средней энергии ЕС на пилотный элемент одного пилотного сигнала, принятого в единственной антенне приемника, к плотности I0 принятой шумовой мощности в дБ.
Верхний предел для оцененного усиления определяется числом передающих антенн, что иллюстрируется на фиг.6 как 6 дБ. Как показано на фиг.6, оценочное усиление достигает верхнего предела, даже хотя предполагается, что угловая расходимость не равна нулю, и принятый сигнал сильно искажен шумом. Снижение оценочного усиления с увеличением пилотного С/Ш происходит вследствие ненулевой угловой расходимости.
Хотя канальные импульсные отклики не полностью коррелированы, выведение импульсного отклика hnew предполагает это свойство. Для больших угловых расходимостей ожидается меньшее оценочное усиление. Для меньших угловых расходимостей оценочное усиление представляется значительным. Отметим, что в общем случае для городских и загородных сред стандартное отклонение от одного (1) до двух (2) градусов наблюдается часто. Отметим также, что возможно оценивать качественное улучшение способа канальной оценки со сниженным рангом с помощью моделирования методом Монте-Карло, чтобы вывести снижение ошибок оценки канальных импульсных откликов по сравнению с обычной канальной оценкой с помощью независимых корреляторов.
Канальная оценка со сниженным рангом для систем, использующих множество передающих антенн, обеспечивает улучшение качества канальной оценки при определенных условиях распространения с ограниченным различием из-за коррелированного фединга. Поскольку механизмы, воздействующие на корреляцию, такие как направленность распространения радиоволн, изменяются относительно медленно во времени, корреляционные характеристики могут оцениваться путем усреднения по расширенным временным интервалам. Это противоположно временным интервалам, связанным с обратной величиной частоты фединга, и тем самым обеспечивает улучшенную точность при оценивании корреляционных характеристик.
Канальная оценка со сниженным рангом для множества передающих антенн применима также к частотно-селективным каналам путем вычисления либо отдельных оценок корреляционных характеристик, либо путем вычисления оценок корреляционных характеристик по всем задержкам распространения. Отдельными оценками именуются вычисления Rh для каждой задержки распространения. Канальная оценка со сниженным рангом выполняется затем с учетом каждой задержки, произошедшей в импульсном отклике частотно-селективного канала. В альтернативном варианте выполнения, в котором заранее известна дополнительная информация, такая как конфигурация антенн в передатчике, шаг оценивания линейного преобразования сниженного числа некоррелированных каналов в большее число коррелированных каналов может быть более точным. Кроме того, процесс оценки со сниженным рангом может расширяться на случаи с более чем одной приемной антенной. В этом случае оценка выполняется для каналов МнМн, как показано на фиг.1. Хотя настоящий пример включает в себя систему, применяющую когерентную демодуляцию, канальная оценка со сниженным рангом, как описано здесь, применима также к системам связи, использующим некогерентную демодуляцию.
Приемник 100 согласно одному варианту выполнения настоящего изобретения иллюстрируется на фиг.7. Этот приемник 100 имеет единственную антенну 102, которая принимает сигналы от передатчика, имеющего множество антенн. Принятые сигналы сначала обрабатываются препроцессором 104. Эти сигналы подаются затем в коррелятор 106, который используется в качестве скользящего коррелятора для поиска и в качестве коррелятора для значимых задержек для канальной оценки. В альтернативном варианте выполнения задержки определяются программным обеспечением без использования коррелятора. Выходы коррелятора 106 используются для получения оценки ковариационной матрицы. В одном варианте выполнения коррелятор 106 состоит из зубцов для формирования гребенки, имеющей по одному зубцу для каждой комбинации передающей антенны, приемной антенны и значимой задержки. Оценки подаются в центральный процессор 112 по шине 116. Процессор 112 сохраняет оценки канальных параметров в памяти 114, так что эти оценки могут использоваться для выведения усредненной по времени канальной ковариационной матрицы.
Из памяти 114 оцененная ковариационная матрица подается в блок 118 рангового анализа и оценки подпространства для декомпозиции собственных значений. Если одно или более собственных значений доминируют над остальными, канальное подпространство оценивается путем вычисления собственных векторов, которые соответствуют доминантным собственным значениям. Собственные векторы, охватывающие канальное подпространство, записываются в память для дальнейшего использования в блоке 109 проецирования в канальное подпространство, где вырабатываются оценки канальных параметров со сниженным рангом путем вычисления проекции (NTx·NRx·NE) исходных канальных оценок за временной интервал оценки на канальное подпространство, что дает в результате NCh оценок канальных параметров со сниженным рангом за временной интервал оценки. Результаты из блока 109 проецирования в канальное подпространство записываются в память для использования в демодуляторе 110. Опционально, блок 109 проецирования в канальное подпространство может вырабатывать эквивалентные полноразмерные оценки канальных параметров путем обратного преобразования NCh оценок канальных параметров со сниженным рангом в (NTx·NRx·NE) эквивалентных полноразмерных оценок канальных параметров за временной интервал оценки. Например, в обычной конструкции приемника с гребенчатым фильтром для полноранговой канальной модели число зубцов гребенки для полнорангового демодулятора было бы равно (NTx·NRx·NE). Полноранговый демодулятор использовал бы тогда (NTx·NRx·NE) оценок исходных канальных параметров для зубцовых коэффициентов. Демодулятор пониженной сложности может в конечном счете использовать только NCh зубцов гребенки, используя в качестве коэффициентов NCh канальных оценок со сниженным рангом. Однако, поскольку приемник в общем случае проектируется в предположении наихудшей ситуации, т.е. когда воплощаются (NTx·NRx·NE) зубцов, достаточно будет вычислить (NTx·NRx·NE) оценок коррелированных канальных параметров с улучшенным качеством оценки по NCh оценкам канальных параметров со сниженным рангом.
Блок 108 рангового анализа и оценки подпространства и блок 109 проецирования в подпространство могут воплощаться в цифровом сигнальном процессоре (ЦСП) (DSP), выполненном в аппаратном виде, в программном виде, в виде зашитой программы или в виде их комбинации. Модули в приемнике 100 могут быть объединены и иллюстрируются отдельными блоками на основании их функций для ясности.
Примерная конфигурация одного варианта выполнения иллюстрируется на фиг.8 для системы с четырьмя (4) передающими антеннами и двумя (2) приемными антеннами. Три (3) тракта передачи показаны и помечены 1, 2 и 3. Точки отражения для трактов 1 и 2 обе находятся на одном и том же эллипсе, причем этот эллипс сформирован так, что передатчик Тх и приемник Rx являются фокусными точками. Отметим, что этот эллипс наложен на иллюстрацию физического чертежа системы. Тракт 3 попадает вне показанного эллипса. Тракты 1 и 2 имеют одну и ту же значимую задержку τ1 по отношению к приемнику, тогда как тракт 3 имеет значимую задержку τ2, отличающуюся от τ1. Задержка тракта является функцией конфигурации антенн, равно как и окружения системы. Как показано, четыре (4) передающих антенны и две (2) приемных антенны дают в результате восемь (8) каналов. Каждая из задержек τ1 и τ2 трактов создает эхо, причем (NE=2). Размерность ковариационной матрицы задается как (NTx·NRx·NE) или шестнадцать (16), что соответствует (NTx·NRx·NE) отсчетам канальных импульсных откликов. Поэтому полноранговый вектор канальных параметров является вектором 16 размерности. С помощью описанного здесь способа снижения ранга можно снизить ранг канальной оценки для размерности три (3), что соответствует трактам 1, 2 и 3, причем (NCh=2). Отметим, что когда отображение NCh трактов передачи в (NT·NRx·NE) отсчетов канальных импульсных откликов неизвестно, подпространство можно выделить из информации о конфигурации. Если местоположение и характеристики, такие как направление и направленность, антенн известны, эту информацию можно использовать для выработки матричного отклика или управляющего вектора. С помощью управляющего вектора и информации направления тракта, которая также может быть выделена с помощью подпространственных алгоритмов, оценивается угол α передачи. Если конфигурация антенн имеет фиксированную развертку, можно вычислить угол передачи. Вектор формируется, включая угол передачи для каждой передающей антенны. Аналогично, вектор угла прихода формируется с учетом приемных антенн. Линейное преобразование для отображения NCh трактов передачи в (NTx·NRx·NE) отсчетов канальных импульсных откликов конструируется с помощью этой информации из конфигураций как передатчика, так и приемника. Это обеспечивает матрицу В, заданную выше уравнением (19), описывающую это линейное преобразование. Ковариационная матрица выводится из нее, как в уравнении (20) выше. Затем процесс продолжается как для случая, где соответствующая информация получается из априорного знания.
Хотя один вариант выполнения описан здесь по отношению к временной области, альтернативный вариант выполнения осуществляет снижение ранга ковариационной матрицы или матрицы отсчетов в частотной области. Если параметры и уравнения разработаны в частотной области, процесс оценивания канала включает в себя тогда значения частотной области.
Предыдущее описание предпочтительных вариантов выполнения представлено, чтобы позволить любому специалисту изготовить или использовать настоящее изобретение. Различные модификации этих вариантов выполнения будут сразу же понятны специалистам, а общие определенные здесь принципы могут применяться к другим вариантам выполнения без использования изобретательства. Таким образом, настоящее изобретение не ограничено показанными здесь вариантами его осуществления, но соответствует самому широкому объему, согласующемуся с раскрытыми здесь принципами и признаками формулы изобретения.
Изобретение относится к способу снижения ранговой оценки канала в системе беспроводной связи. Достигаемый технический результат - упрощение оценочных вычисления за счет использования избыточного (априорного) знания о системе. Способ и устройство для снижения ранговой оценки канала используют множество передающих антенн. Ковариационная матрица, представляющая линию с передатчиком, вычисляется (44) и анализируется (46), чтобы определить, можно ли уменьшить ее ранг. Если нет, то используются все параметры (50), если - да, то для вычислений используется матрица со сниженным рангом (54). 4 н. и 13 з.п. ф-лы, 8 ил.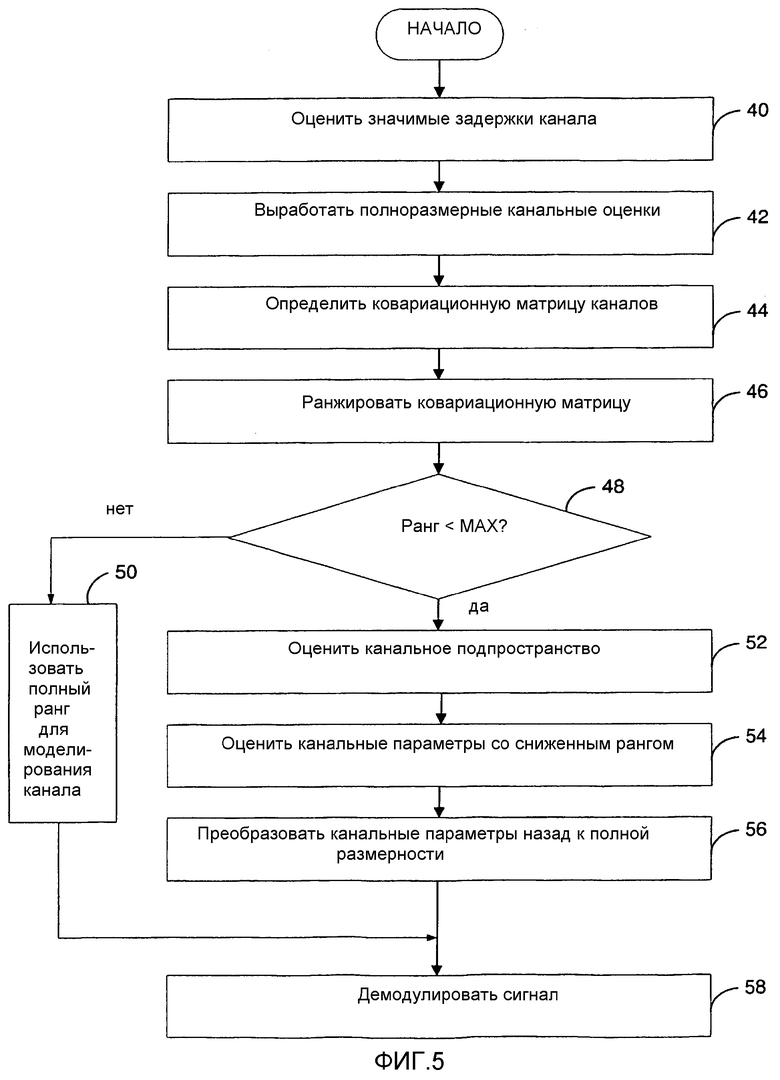
коррелятор, обеспечивающий формирование канальной оценки, сохраняемой в блоке памяти, канальная оценка используется для выведения ковариационной матрицы, представляющей линию с передатчиком, при этом канальная оценка основана на сигналах, принятых от этого передатчика;
блок рангового анализа, связанный с блоком памяти, блок рангового анализа обеспечивает оценку ранга ковариационной матрицы; и
блок канальной оценки, связанный с блоком рангового анализа, блок канальной оценки обеспечивает формирование канальной оценки со сниженным рангом.
коррелятор, обеспечивающий формирование канальной оценки, сохраняемой в блоке памяти, канальная оценка используется для выведения ковариационной матрицы, представляющей линию с передатчиком, при этом канальная оценка основана на сигналах, принятых от этого передатчика;
блок рангового анализа, связанный с блоком памяти, блок рангового анализа обеспечивает оценку ранга ковариационной матрицы; и
блок канальной оценки, связанный с блоком рангового анализа, блок канальной оценки обеспечивает формирование канальной оценки со сниженным рангом.
оценивают ковариационную матрицу, основываясь на канальной оценке, сохраняемой в блоке памяти, ковариационная матрица представляет линию с передатчиком, при этом канальная оценка основана на сигналах, принятых от этого передатчика;
оценивают ранг ковариационной матрицы и
формируют канальную оценку со сниженным рангом.
средство для оценки ковариационной матрицы, использующее канальную оценку, сохраняемую в блоке памяти, ковариационная матрица представляет линию с передатчиком, при этом канальная оценка основана на сигналах, принятых от этого передатчика;
средство для оценки ранга ковариационной матрицы и
средство для формирования канальной оценки со сниженным рангом.
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОДАВЛЕНИЯ ИНТЕРФЕРЕНЦИИ В МНОГОАНТЕННЫХ ЦИФРОВЫХ СОТОВЫХ СИСТЕМАХ СВЯЗИ | 1995 |
|
RU2137302C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ТЕСТИРОВАНИЯ ЦИФРОВОГО КАНАЛА СВЯЗИ С ПЕРЕМЕННЫМИ ИЛИ ФИКСИРОВАННЫМИ СКОРОСТЯМИ ПЕРЕДАЧИ ДАННЫХ | 1995 |
|
RU2142197C1 |
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |
| Устройство для контроля и учета работы оборудования | 1980 |
|
SU866568A1 |
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |

