Область техники
Настоящее изобретение относится к формированию сигналов, например, устройством пользователя, для обеспечения информации о местоположении транспортного средства.
Уровень техники
Система связи, используемая в соответствии с набором технических требований к системе LTE консорциума 3GPP, использует мультиплексирование с ортогональным частотным разделением каналов (OFDM, Orthogonal Frequency Division Multiplexing) в нисходящем направлении (от базовой станции к мобильному телефону) и множественный доступ с частотным разделением каналов с одной несущей (SC-FDMA, Single Carrier Frequency Division Multiple Access) в восходящем направлении (от мобильного телефона к базовой станции) через беспроводной интерфейс Uu, то есть через радиоинтерфейс между мобильным устройством (устройством пользователя, UE, User Equipment) и базовой станцией (eNodeB, eNB).
Для обеспечения когерентной демодуляции на приемной стороне в сетку частотно-временных ресурсов OFDM (нисходящего канала) или SC-FDMA (восходящего канала) передающим объектом вводятся опорные сигналы (или контрольные символы), чтобы обеспечить оценку канала. В отличие от физического канала, несущего информацию, полученную с более высоких уровней стека протоколов, физические сигналы соответствуют набору ресурсных элементов, используемых самим физическим уровнем, и не несут информации, полученной с более высоких уровней. Вместо этого они содержат известные символы (то есть заранее заданные последовательности данных) - так называемые опорные или контрольные символы. Физические сигналы генерируются и внедряются непосредственно на физическом уровне PHY (Physical layer) в определенные (т.е. заранее заданные) ресурсные элементы.
Опорные символы нисходящего канала (опорные сигналы для конкретной соты) вводятся в первый и третий символ OFDM с конца каждого временного интервала (слота) (это соответствует пятому символу OFDM слота в случае обычного циклического префикса) с интервалом в частотной области, равным шести поднесущим. Кроме того, существует разнесение в частотной области трех поднесущих между первым и вторым опорными символами. Следовательно, в каждом ресурсном блоке (то есть в блоке, состоящем из двенадцати поднесущих и семи символов OFDM в случае обычного циклического префикса) имеется четыре опорных символа. Для оценки качества канала устройство пользователя выполняет интерполяцию по нескольким опорным символам.
В случае двух передающих антенн опорные сигналы вводятся для каждой антенны, при этом опорные сигналы второй антенны смещены в частотной области на три поднесущие. Для обеспечения точной оценки коэффициентов канала устройством пользователя передача другой антенной в том же частотно-временном положении опорных сигналов не производится. Это означает, что в тех ресурсных элементах, в которых антенна № 0 передает опорные сигналы R0, антенна № 1 не передает ни информацию, полученную с более высоких уровней, ни собственные опорные сигналы R1 (и наоборот). Это гарантирует, что принимающее устройство пользователя может оценивать качество двух пространственно разделенных радиоканалов (а именно: одного - к антенне № 0, и другого - к антенне № 1). Тот же принцип может быть распространен на четыре разных антенны и т.д.
Опорные символы имеют комплексные значения. Более подробная информация об опорных сигналах, предназначенных для использования в нисходящем направлении, приведена в разделе 6.10.1. документа 3GPP TS 36.211.
Имеется также два вида опорных сигналов для восходящего направления в системе LTE.
Первый вид представляет собой опорный сигнал демодуляции (DM-RS, Demodulation Reference Signal), используемый для обеспечения демодуляции когерентного сигнала в станции eNodeB. Эти сигналы мультиплексируются по времени с данными восходящего канала и передаются в четвертом или третьем символе SC-FDMA слота восходящего канала для обычного или расширенного циклического префикса CP (Cyclic Prefix), соответственно, с использованием той же полосы частот, что и для данных. Сигнал DM-RS связан с ресурсами восходящего канала, используемого для передачи сигналов физического восходящего канала общего доступа (PUSCH, Physical Uplink Shared Channel ) или физического канала управления восходящим каналом (PUCCH, Physical Uplink Control Channel).
Второй вид представляет собой зондирующий опорный сигнал (SRS, Sounding Reference Signal), используемый для обеспечения зависящего от канала (то есть частотно-избирательного) планирования восходящего канала, поскольку сигнал DM-RS не может использоваться для этой цели, так как он назначается для всей полосы частот, выделенной устройству UE. Сигнал SRS вводится как более широкополосный опорный сигнал, обычно передаваемый в последнем символе субкадра длительностью 1 мс. Передача пользовательских данных в этой части сетки ресурсов не допускается, что приводит к снижению пропускной способности восходящего канала приблизительно на 7%. Сигнал SRS является опциональным и легко конфигурируется для управления служебной информацией, он даже может быть включен или выключен в конкретной соте. Пользователи с различной шириной полосы передачи совместно используют этот зондирующий канал в частотной области.
Более подробная информация об опорных сигналах, предназначенных для использования в восходящем направлении, приведена в разделе 5.5 TS 36.211 3GPP.
Кроме того, подробности о физическом уровне системы LTE и сигналах RS в целом приведены, в частности, в документе «LTE in a Nutshell: The Physical Layer» от Telesystem Innovations, http://www.tsiwireless.com/docs/whitepapers/LTE%20in%20a%20Nutshell%20-%20Physical%20Layer.pdf
В контексте настоящего изобретения любой вид опорного сигнала, например, опорные сигналы нисходящего канала или восходящего канала, описанные выше, могут быть использованы в качестве уникального идентификатора антенны. Поэтому для каждой антенны используются разные опорные символы.
Другой вид физических сигналов, непосредственно внедряемых на физическом уровне в определенные ресурсные элементы в сетке ресурсов нисходящего канала в системе LTE (и, таким образом, не несущих никакой информации, полученной с более высоких уровней стека протоколов), представляет собой сигналы синхронизации LTE.
В каждой сетке ресурсов нисходящего канала, независимо от конфигурации полосы частот, первичные и вторичные символы синхронизации расположены в последних двух символах слотов № 0 и № 10. Они не распределены по всей полосе частот несущей, а распространяются только на шесть внутренних ресурсных блоков (RB, Resource Block), т.е. от RB № 47 до RB № 52 (эта нумерация RB действительна только для полосы частот системы шириной 20 МГц; в случае меньшей полосы частот системы нумерация отличается; в любом случае символы синхронизации расположены вблизи несущей канала DC (Data Channel, канал передачи данных)).
Первичные сигналы синхронизации (PSS, Primary Synchronization Signal) характеризуются следующими признаками:
- они расположены в шести самых внутренних ресурсных блоках (RB), сосредоточенных вокруг несущей канала DC в символе № 6 слота № 0 (в субкадре № 0) и слота № 10 (в субкадре № 5);
- они построены из последовательности Задова-Чу длиной 62;
- для них определены три разные последовательности, выбранные на основе физического идентификатора соты;
- из 72 поднесущих только 62 несут данные сигнала PSS, а оставшиеся 10 поднесущих (по 5 с каждой стороны) заполнены нулями;
- они используются для синхронизации кадров нисходящего канала;
- они используются для определения физического идентификатора соты (совместно с вторичными сигналами синхронизации (SSS, Secondary Synchronization Signals)).
В системе LTE с дуплексным временным разделением (TDD, Time Division Duplex), сигналы PSS отображаются в третий символ первого слота в субкадрах № 1 и № 6.
Сигналы SSS характеризуются следующими признаками:
- они расположены в шести самых внутренних ресурсных блоках (RB), сосредоточенных вокруг несущей канала DC в символе № 5 в слоте № 0 (субкадра № 0) и в слоте № 10 (субкадра № 5);
- последовательность сигнала SSS, используемая в субкадре № 0, отличается от последовательности, используемой в субкадре № 5;
- для них определено 168 разных последовательностей, выбранных на основе физического идентификатора соты;
- они состоят из 62 скремблированных последовательностей (на основе вычисления m-последовательности);
- значения в нечетных индексированных ресурсных элементах и значения в четных индексированных ресурсных элементах определяются из различных уравнений;
- они используются для синхронизации кадров нисходящего канала;
- они используются для определения физического идентификатора соты (совместно с сигналами PSS).
В системе LTE TDD сигналы SSS отображаются в последний символ второго слота в субкадрах № 0 и № 5.
Положение символа сигнала PSS/SSS во временной области отличается в системе с дуплексным частотным разделением (FDD, Frequency Division Duplex) FDD и в системе TDD, поскольку это помогает устройству UE определить, какое именно разделение – FDD или TDD используется в системе.
Поскольку положение сигнала PSS/SSS в частотной области всегда постоянно, устройство UE может легко проверить корреляцию в ожидаемой полосе, чтобы принять сигнал PSS/SSS, из которого устройство UE может получить ряд параметров, таких как физический идентификатор соты (PCID, Physical Cell ID), режим дуплексной передачи FDD или TDD (из положения сигнала PSS/SSS во временной области), номер субкадра (из последовательности сигнала SSS) и информация о границе слота.
Сигналы PSS и SSS совместно определяют физический идентификатор соты (PCID) для соты радиосвязи. Устройство UE определяет идентичность физического уровня из сигнала PSS и группу сот с идентичным физическим уровнем из сигнала SSS. Как описано выше, существует три разных сигнала PSS (= Layer_ID) и 168 разных сигналов SSS (= Group_ID), ограничивающих максимальное количество идентификаторов PCID значением 504. Идентификатор PCID формируется в соответствии со следующей формулой:
PCID = 3 × Group_ID + Layer_ID
Услуги автомобильной связи включают в себя следующие четыре различных вида связи: между транспортными средствами (V2V, vehicle-to-vehicle), между транспортным средством и инфраструктурой (V2I, vehicle-to-infrastructure), между транспортным средством и сетью (V2N, vehicle-to-network) и между транспортным средством и пешеходом (V2P, vehicle-to-pedestrian), совместно называемые «услугами V2X».
Поддержка сети LTE для автомобильной связи была изучена и определена в 3GPP в течение периода версии Rel-14, поскольку широко применяемые сети LTE предоставляют автомобильной промышленности прекрасную возможность реализации концепции «автомобиля на связи». Результаты анализа консорциумом 3GPP ее осуществимости были обобщены в документе TR 36.885 с выводом о том, что возможна поддержка услуг V2X через интерфейс PC5 системы LTE с необходимыми улучшениями (в отношении выделения ресурсов для прямого соединения, структуры физического уровня и синхронизации).
В исследовании также рассматривались сценарии автомобильной связи, основанные не только на интерфейсе PC5 «прямого соединения» в сети LTE, но также на интерфейсе Uu между устройством UE в сети LTE и базовой станцией (и комбинации интерфейсов Uu и PC5). Максимальная эффективность услуг V2X может быть достигнута путем правильного выбора или переключения сценариев работы.
Радиоинтерфейс LTE Uu поддерживает трафик восходящего канала и нисходящего канала, а радиоинтерфейс LTE PC5 представляет собой интерфейс прямого соединения, имеющий особое значение для настоящего изобретения.
Придорожные блоки (RSU, Roadside Unit) могут быть реализованы в виде стационарных объектов (например, установленных в уличной инфраструктуре), которые обмениваются данными через радиоинтерфейс LTE PC5 с транспортными средствами (или с пешеходами, или с другими RSU) и обеспечивают либо беспроводное соединение через интерфейс LTE Uu с ближайшей базовой станцией, либо прямое соединение через интерфейс S1 с опорной сетью.
Базовая структура, определенная в версии Rel-14 системы LTE, расширяет радиоинтерфейсы LTE PC5 и LTE Uu с оптимизацией технологии LTE для множества вариантов услуг V2X. Таким образом, были внесены следующие основные изменения: усовершенствована физическая структура прямого соединения для улучшения характеристик демодуляции в высокоскоростных сценариях, обеспечена поддержка синхронизации на основе глобальной системы спутниковой навигации (GNSS, Global Navigation Satellite System), реализован выбор ресурсов на основе сигналов датчиков для автономного режима работы устройства UE, обеспечена полупостоянная передача и планирование для прямого соединения. Кроме того, была реализована возможность использования информации о местоположении транспортного средства с целью расширенного управления ресурсами радиосвязи для автономных устройств UE и управляемых станцией eNB режимов работы, чтобы повысить эффективность связи для услуг V2X.
Недавно была выявлена потребность в более точном и надежном определении местоположения для услуг V2X (см. раздел документа 3GPP TR 22.886), что может быть достигнуто в услугах V2X с помощью ряда способов, включая использование системы GNSS, входных данных с камеры, применение лидара, радара и датчиков мобильности, но не ограничиваясь ими. Все эти подходы имеют свои технические преимущества и недостатки. Вероятно, что усовершенствование определения местоположения для услуг V2X будет основано на различных способах или их комбинации, чтобы обеспечить более надежные и точные характеристики местоположения.
Согласно документу 3GPP TR 22.886, в будущем такая 3GPP-система должна поддерживать относительную точность определения поперечного местоположения 0,1 м, и относительную точность определения продольного местоположения лучше 0,5 м для устройств UE, поддерживающих приложения для услуг V2X.
На пленарном заседании № 75 Группы технических условий (TSG, Technical Specification Group) консорциума 3GPP на тему сетей радиодоступа (RAN, Radio Access Network) было предложено (см. документы RP-170427 и RP-170428) провести дальнейшее исследование технологий определения местоположения транспортных средств для технологии LTE (с намерением впоследствии использовать результаты, по возможности, в последующей технологии «5G» LTE). В этом контексте было упомянуто измерение расстояний через радиоинтерфейс LTE PC5 для обеспечения точного измерения расстояния между транспортными средствами и местоположения транспортного средства. Также было указано, что решения на основе системы GNSS сами по себе могут не обеспечивать достаточную точность определения местоположения для услуг V2X (или вовсе могут быть недоступными в некоторых случаях применения, таких как подземные автостоянки и т.п.).
Измерение расстояния на основе радиоинтерфейса LTE PC5 может рассматриваться как одно из наиболее перспективных решений для оценки расстояний между транспортными средствами. В некоторых сценариях эти решения на базе LTE PC5 могут рассматриваться как дополнительный вариант, который может способствовать общему улучшению характеристик определения местоположения для услуг V2X.
Радиоинтерфейс LTE PC5 использует те же частотно-временные ресурсы, что выделены для передачи по восходящему каналу через радиоинтерфейс LTE Uu, т.е. для связи по прямому соединению в данной соте в технологии FDD-LTE используются несущие частоты восходящего канала, а в технологии TDD-LTE - субкадры восходящего канала. Были определены следующие физические каналы прямого соединения PSxCH:
- физический широковещательный канал для прямого соединения (Physical Sidelink Broadcast Channel, PSBCH), он несет информацию о системе и синхронизации;
- физический канал обнаружения прямого соединения (Physical Sidelink Discovery Channel, PSDCH), он несет сообщение об обнаружении прямого соединения;
- физический канал управления прямым соединением (Physical Sidelink Control Channel, PSCCH), он несет информацию об управлении связью по прямому соединению;
- физический канал общего доступа для прямого соединения (Physical Sidelink Shared Channel, PSSCH), он несет фактические данные для связи по прямому соединению.
Для передачи по прямому соединению используется та же базовая схема передачи, что и для схемы передачи по восходящему каналу (UL, Uplink). Тем не менее, прямое соединение ограничено передачами в одном кластере для всех физических каналов прямого соединения. Кроме того, в прямом соединении обычно используется односимвольный пробел в конце каждого субкадра для прямого соединения. При связи по прямому соединению для услуг V2X каналы PSCCH и PSSCH передаются в одном субкадре. Обработка физического уровня прямого соединения отличается от передачи по каналу UL следующими этапами.
Скремблирование: для каналов PSDCH и PSCCH скремблирование не зависит от устройства UE.
Модуляция: для связи по прямому соединению не поддерживается модуляция 64 QAM (Quadrature Amplitude Modulation, квадратурная амплитудная модуляция).
Для прямого соединения были определены два вида физических сигналов: сигналы синхронизации прямого соединения (SLSS, Sidelink Synchronization Signals), и опорные сигналы демодуляции прямого соединения (DM-RS, Sidelink Demodulation Reference Signals).
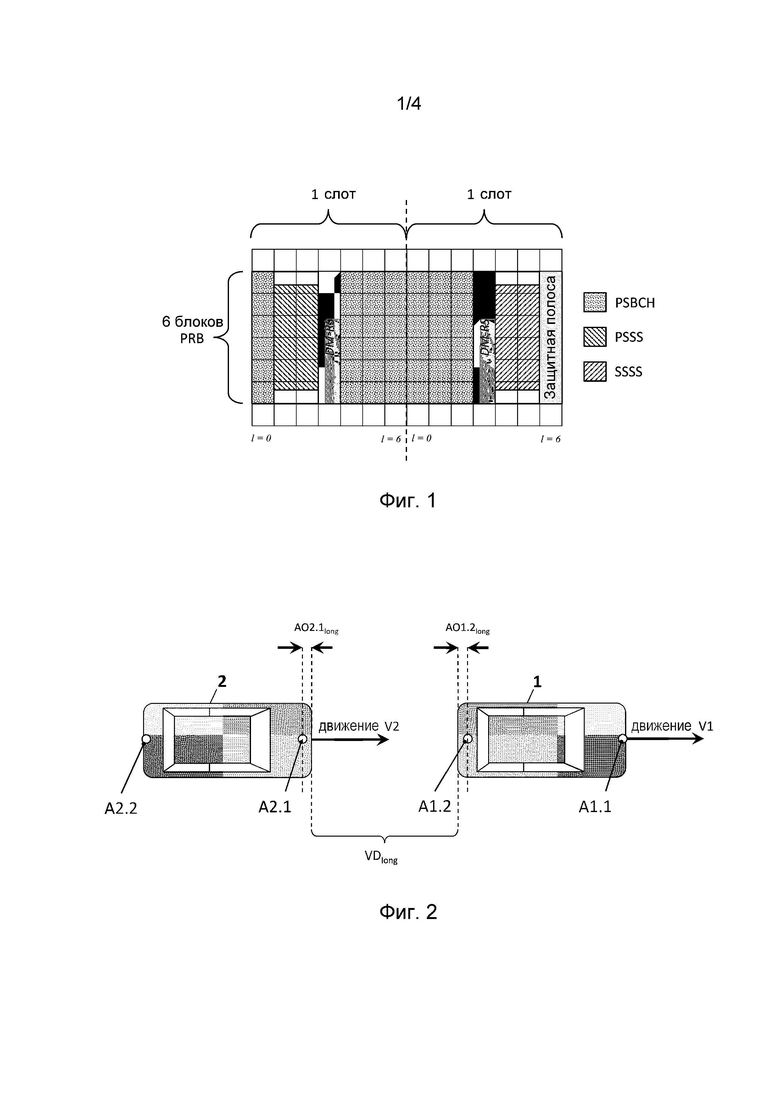
На фиг. 1 представлен пул ресурсов для прямого соединения (или его подмножество). Такой пул ресурсов (или его подмножество) может появляться несколько раз в субкадре в разных частях частотного диапазона. Сигналы SLSS состоят из первичных сигналов синхронизации прямого соединения (PSSS, Primary Sidelink Synchronization Signals) и вторичных сигналов синхронизации прямого соединения (SSSS, Secondary Sidelink Synchronization Signals), аналогичных тем, что используются в существующей сетке ресурсов нисходящего канала LTE Uu. В примере, показанном на фиг. 1, есть ограничение до шести физических ресурсных блоков, PRB (Physical Resource Blocks), поскольку в этом разделе основное внимание уделяется сигналам SLSS, которые не выходят за пределы этих блоков PRB. Тем не менее, в реальных условиях пул ресурсов для прямого соединения (или его подмножество) может иметь более широкую полосу частот. Кроме того, когда другие физические каналы (т.е. каналы кроме канала PSBCH, показанного на фиг. 1) отображаются в различные ресурсные элементы сетки, положение сигналов синхронизации может изменяться. Для простоты на фиг. 1 это не показано.
Сигналы DM-RS, связанные с различными физическими каналами прямого соединения PSxCH (такими как каналы PSSCH, PSCCH, PSDCH и PSBCH), должны передаваться в соответствии с физическим восходящим каналом общего доступа (PUSCH) через радиоинтерфейс LTE Uu с некоторыми исключениями, как определено в разделе 9.8 документа TS 36.211.
Для каналов PSDCH и PSCCH опорные сигналы формируются на основе постоянной базовой последовательности, циклического сдвига и ортогонального кода покрытия. Для связи по прямому соединению в услугах V2X циклический сдвиг для канала PSCCH выбирается случайным образом для каждой передачи.
Другое исключение заключается в том, что длина последовательности DM-RS для прямого соединения равна размеру (т.е. количеству поднесущих) выделенного ресурса.
Еще одно исключение заключается в том, что для связи по прямому соединению в услугах V2X опорные сигналы передаются в 3-м и 6-м символах первого слота и во 2-м и 5-м символах второго слота для каналов PSSCH и PSCCH в случае обычного префикса CP, а также в 5-м и 7-м символах первого слота и 3-м символе второго слота для канала PSBCH, то есть чаще, чем предполагается на фиг. 1.
Номер порта антенны одинаков для всех физических каналов прямого соединения. Следовательно, передача или прием посредством одновременного использования нескольких антенн для прямого соединения в настоящее время не предусмотрена.
В документе JP2005241486 описано средство для точного измерения расстояния от заданного транспортного средства до предыдущего транспортного средства и до следующего транспортного средства при условии низкой стоимости с использованием радиолокационных сигналов.
В документе WO2016159712A1 описан протокол связи для услуг V2X, в котором устройство может широковещательно передавать сообщения, содержащие информацию о местоположении, виде и направлении. Информация о местоположении может представлять собой абсолютное положение устройства с использованием данных GPS (Global Positioning System, глобальная система определения местоположения) или относительное положение.
В документе WO2017007285A1, также опубликованном как EP3322234A1, описана система прямой связи между устройствами (D2D, device-to-device) с синхронизацией, основанной на спутниковой синхронизации.
Как упомянуто выше, первые идеи для работы над вариантом Rel-15 были представлены в группу 3GPP TSG RAN с темой «высокоточное определение местоположения транспортных средств». В этом контексте некоторые компании предложили использовать канал радиосвязи по интерфейсу РС5 между транспортными средствами для прямого измерения дальности. Эти усилия основаны на требованиях, определенных рабочей группой 3GPP SA1, которая хотела бы улучшить разрешающую способность измерения до сантиметровой точности.
До сих пор описание и наглядное представление основывались на сценарии, в котором только одна антенна установлена в центре на крыше автомобиля. Транспортные средства, оборудованные несколькими антеннами, как, например, требуется для поддержки системы со многими входами и многими выходами (MIMO, Multiple Input Multiple Output,), еще не описаны.
При этом точное измерение расстояния до одной или нескольких антенн, установленных на транспортном средстве, бесполезно в свете предстоящего обсуждения, касающегося измерения дальности для услуг V2V в рамках 3GPP, просто из-за большого разнообразия конструкций транспортных средств: один автомобиль может быть оснащен одной антенной, расположенной в центре на крыше автомобиля, другой автомобиль может быть оснащен двумя плоскими антеннами, встроенными в оконные стекла с двух сторон автомобиля, а еще один автомобиль может быть оснащен комплектом из четырех антенн, две из которых расположены спереди (например, на переднем бампере или на капоте двигателя), а две сзади (например, на заднем бампере или на крышке багажника автомобиля). Кроме того, средний легковой автомобиль имеет размеры от четырех до пяти метров в длину и до двух метров в ширину.
Таким образом, возникает неприемлемая неопределенность в отношении фактического расстояния до внешних границ и краев транспортных средств. Эта проблема не решается путем одного лишь повышения точности измерения расстояния между антеннами. Поэтому целью настоящего изобретения является определение дополнительных средств для расширения арсенала способов измерения расстояний (в частности, через радиоинтерфейс PC5 для услуг V2X) с целью надежного измерения расстояний до внешних границ и краев транспортного средства, а не расстояний до антенны с неопределенным местом установки.
Раскрытие изобретения
Настоящее изобретение реализует способ передачи информации о местоположении транспортного средства, в котором сигналы передаются по меньшей мере одной установленной на транспортном средстве антенной для указания местоположения транспортного средства другому объекту, при этом сигналы содержат информацию, относящуюся к идентификатору этой по меньшей мере одной антенны и/или к информации о смещении этой по меньшей мере одной антенны относительно границы транспортного средства.
В первом аспекте изобретения каждая антенна транспортного средства может передавать сигнал, обеспечивающий выполнение коррекции (например, в поперечном измерении, в продольном измерении и/или в высотном измерении), когда расстояние между транспортными средствами вычисляется с высокой точностью для определения местоположения транспортного средства.
С этой целью сигналы могут, например, содержать:
- явно заданное геометрическое (поперечное, продольное и/или высотное) значение (или несколько значений) смещения положения антенны относительно соответствующего края (или нескольких краев) транспортного средства, или
- средство, обеспечивающее определение положения (или нескольких положений) соответствующей антенны (или нескольких антенн) относительно внешних границ транспортного средства, например:
- уникальный идентификатор антенны (например, уникальный в пределах каждого транспортного средства); или
- приблизительное положение антенны (например, передняя антенна или антенна, установленная на правой или левой стороне транспортного средства, или задняя антенна); или
- вид транспортного средства (например, информация о производителе, модели, конструкции кузова, год модели и т.п.); или
- уникальный идентификатор транспортного средства (например, уникальный для региона, где предполагается проведение вычислений); или
- количество активных антенн на транспортном средстве для данного конкретного измерения.
Во втором аспекте настоящего изобретения геометрические размеры транспортного средства или его соответствующей части (или нескольких частей) определяются из сигналов антенны (например, посредством запросов к базе данных), если значение (или несколько значений) геометрического смещения не передается (или не может передаваться) в явном виде.
В третьем аспекте изобретения реализованы различные варианты кодирования информации согласно первому аспекту предусмотрены способы для внедрения сигналов на физическом уровне радиоинтерфейса РС5, например, путем использования или выделения уже существующих сигналов DM-RS (или их подмножества), путем использования или выделения уже существующих сигналов SLSS (или их подмножества) или путем введения новых физических сигналов (например, опорных сигналов для измерения расстояния (DD-RS, Distance Determination Reference Signals)) в соответствующую сетку ресурсов.
Кроме того (или в качестве альтернативы внедрению информации в физические сигналы), информация согласно первому аспекту может передаваться по физическим каналам прямого соединения PSxCH (например, по каналу PSSCH или по каналу PSBCH), при этом информация поступает с более высоких уровней в стеке протоколов. Этот подход может использоваться, когда объем передаваемых данных увеличивается (пример: «Этот автомобиль оснащен четырьмя антеннами в общей сложности, по одной на каждом углу. Идентификатор антенны № xyz1 присвоен правому переднему углу, идентификатор антенны № xyz2 присвоен левому переднему углу и т.д.»).
Четвертый аспект настоящего изобретения предусматривает активацию и деактивацию сигналов по мере необходимости, включая потоки сообщений сигнализации между двумя или более транспортными средствами.
Пятый аспект изобретения представляет собой динамическое изменение скорости передачи символов и схемы их расположения для внедрения сигналов во временной области в зависимости от сценария скорости (например, чтобы иметь больше символов сигналов для быстро движущихся транспортных средств и меньше для медленно движущихся или неподвижных транспортных средств или для движения с высокой скоростью на автостраде в отличие от маневрирования на низкой скорости в гараже).
В зависимости от вида транспортного средства, конфигурации антенн могут быть статическими и динамическими. Активация и деактивация сигналов такого вида для антенн, которые не активны или не нужны постоянно, является шестым аспектом настоящего изобретения.
Изобретение обеспечивает высокую точность определения местоположения транспортных средств. Ранее можно было измерять только расстояние между двумя (или более) антеннами, установленными на транспортных средствах, что не удовлетворяет требованиям группы SA1 относительно улучшения разрешающей способности до сантиметровой точности при определении поперечного и продольного местоположения транспортного средства.
В частности, настоящее изобретение обеспечивает следующие преимущества.
Знание положения антенны относительно геометрических размеров (т.е. внешних границ) соответствующего транспортного средства (или нескольких транспортных средств) имеет важное значение для определения местоположения с высокой точностью, поскольку размеры транспортного средства, место (или несколько мест) установки антенны и количество антенн могут различаться для разных транспортных средств (см. первый и второй аспекты).
Использование уже используемых физических сигналов полезно, поскольку при этом не требуется дополнительных усилий для измерения расстояний. Кроме того, одновременно без каких-либо ограничений может осуществляться беспроводная связь (а именно, с использованием тех ресурсных элементов, которые не выделены физическим сигналам). Использование специальных физических сигналов полезно, поскольку такой сигнал может быть сконфигурирован для обеспечения еще более высокой точности (см. третий аспект).
Активация и деактивация по мере необходимости полезны, поскольку они экономят ресурсы, когда измерение расстояний не требуется (см. четвертый аспект).
Динамическое изменение скорости передачи символов (см. пятый аспект) полезно, поскольку оно экономит ресурсы, когда достаточно небольшого количества символов, и позволяет с высокой точностью измерять расстояние в сложных ситуациях (например, для быстро движущихся транспортных средств и т.п.).
Динамическая конфигурация антенны (см. шестой аспект) полезна, поскольку она также экономит ресурсы, когда достаточно небольшого количества антенн, и позволяет с высокой точностью измерять расстояние в сложных ситуациях (например, при больших потерях распространения волн или при изменении внешних границ).
Краткое описание чертежей
Далее, лишь в качестве примера, описаны предпочтительные варианты осуществления изобретения со ссылкой на приложенные чертежи.
На фиг. 1 показана известная сетка ресурсов для прямого соединения, применяемая в интерфейсе LTE PC5, содержащая первичные и вторичные сигналы синхронизации прямого соединения и физический широковещательный канал прямого соединения.
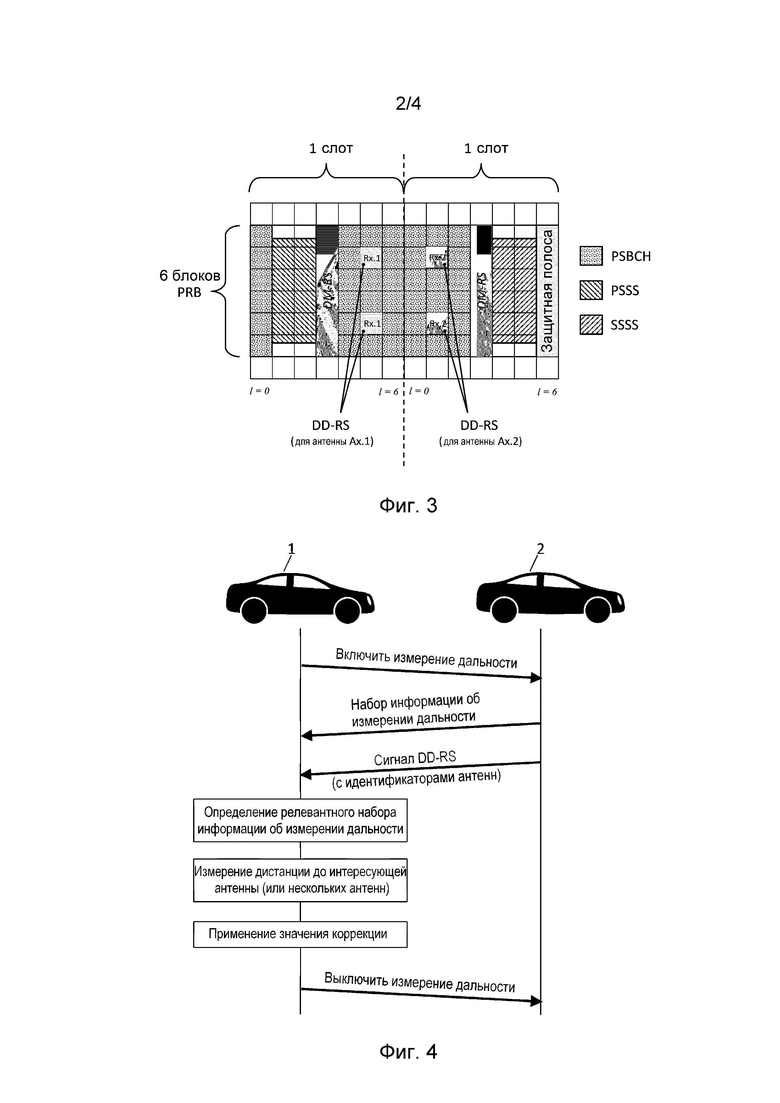
На фиг. 2 проиллюстрирована первая ситуация определения местоположения транспортного средства с двумя транспортными средствами.
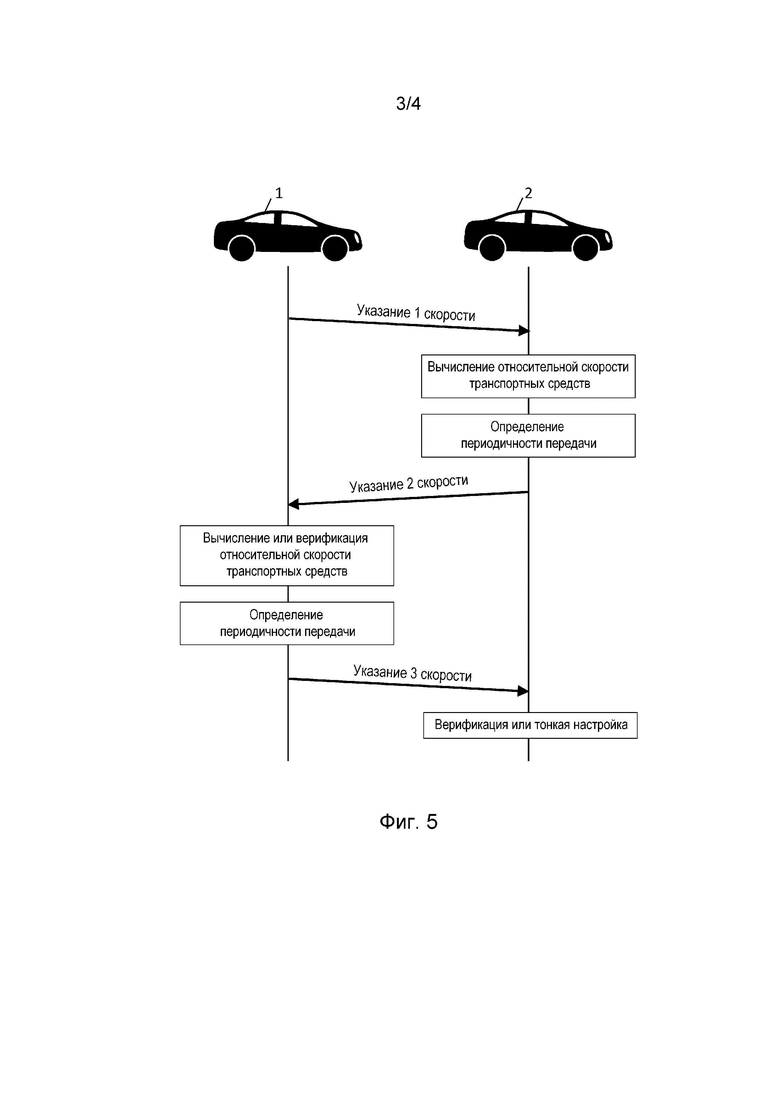
На фиг. 3 показана сетка ресурсов для прямого соединения для транспортного средства с двумя антеннами.
На фиг. 4 представлена схема последовательности сообщений для активации и деактивации определения местоположения транспортного средства.
На фиг. 5 представлена вторая схема последовательности сообщений для определения местоположения транспортного средства в зависимости от скорости.
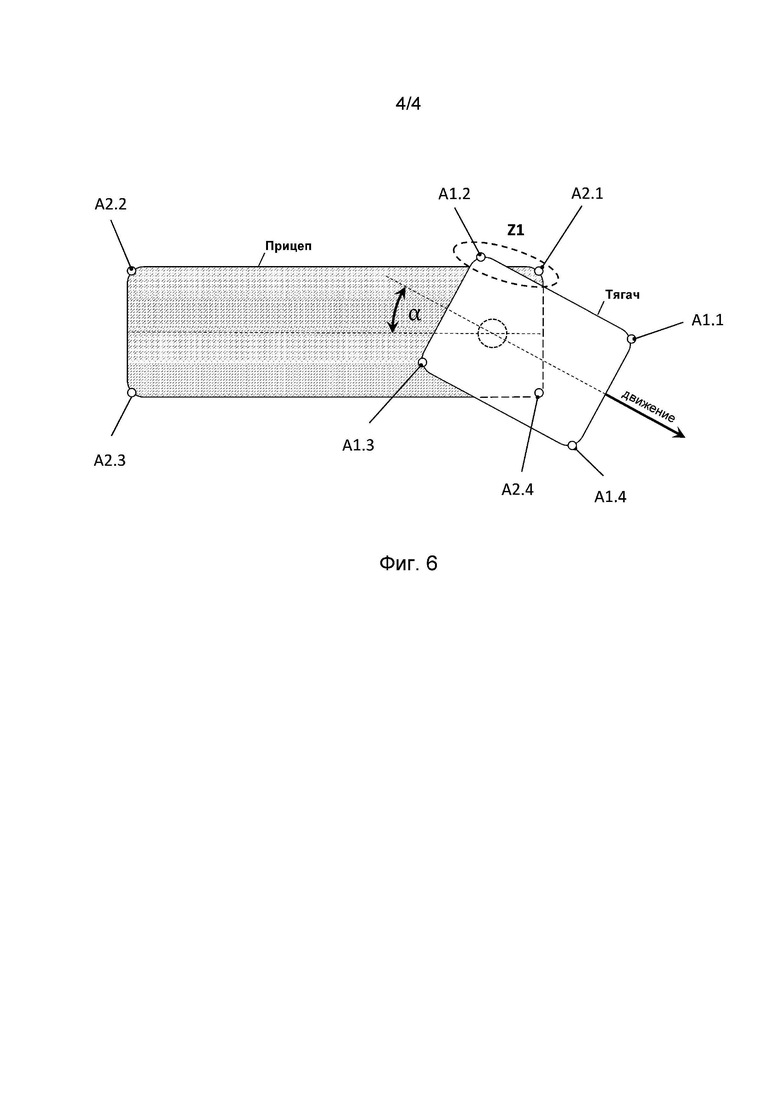
На фиг. 6 показан пример динамической конфигурации антенн.
Осуществление изобретения
На фиг. 2 схематически показана связь между двумя транспортными средствами 1 и 2, реализующая настоящее изобретение. Каждое из транспортных средств имеет две антенны, A1.1 и A1.2, A2.1 и A2.2, при этом каждая антенна имеет известное положение относительно границ соответствующего транспортного средства. Как показано, антенна А1.2 расположена на расстоянии AO1.2long от задней границы транспортного средства 1, а антенна А2.1 расположена на расстоянии AO2.1long от передней границы транспортного средства 2 (нижний индекс «long» означает, что расстояние относится к продольному направлению).
В первом варианте осуществления изобретения антенны передают сигналы, обеспечивающие выполнение коррекции для высокоточного определения местоположения транспортного средства.
В данном варианте осуществления изобретения каждая антенна транспортного средства передает сигналы DD-RS в сетке ресурсов для прямого соединения, используемой в радиоинтерфейсе LTE PC5. Эти сигналы DD-RS могут, например, содержать идентификатор антенны (который, в идеале, уникален в соответствующем месте) или могут содержать идентификатор антенны (который уникален в пределах транспортного средства) и идентификатор транспортного средства (который, в идеале, уникален в соответствующей области). Здесь транспортное средство 1 кодирует следующие иллюстративные идентификаторы антенн в физических сигналах DD-RS, которые передаются в ресурсных элементах, зарезервированных для соответствующих антенн: передней антенны - A1.1 и задней антенны - A1.2. Аналогично, транспортное средство 2 использует идентификаторы антенн, представленные его физическими сигналами DD-RS: передней антенны - A2.1 и задней антенны - A2.2.
Кроме того, каждое транспортное средство имеет возможность передачи по любому из доступных физических каналов прямого соединения PSxCH, например, по каналу PSBCH, индивидуального набора информации (в основном, геометрической) для измерения дальности. В одном варианте осуществления изобретения такой индивидуальный набор может быть связан с сообщением об обнаружении прямого соединения или включен в сообщение RRC SidelinkUEInformation. В другом варианте осуществления изобретения этот индивидуальный набор может быть частью нового вида сообщения, специально определенного для целей измерения дальности (или связан с ним).
В этом варианте осуществления изобретения все антенны установлены очень близко к внешним границам транспортных средств и расположены по центру на капоте двигателя или на багажнике автомобиля (или, в качестве альтернативы, на переднем и заднем бамперах). Высота над уровнем дороги в этом примере для простоты может быть опущена.
В этом примере транспортное средство 1 передает следующий набор данных:
- идентификатор транспортного средства: abcd1234;
- вид транспортного средства: автомобиль среднего размера;
- количество активных антенн: 2;
- антенна A1.1 = передняя антенна, расположена по центру, на расстоянии 0 мм от переднего края автомобиля;
- антенна A1.2 = задняя антенна, расположена по центру, на расстоянии 40 мм от заднего края автомобиля.
Транспортное средство 2 передает следующий набор данных:
- идентификатор транспортного средства: dcba4321;
- вид транспортного средства: полноразмерный автомобиль;
- количество активных антенн: 2;
- антенна A2.1 = передняя антенна, расположена по центру, на расстоянии 75 мм от переднего края автомобиля;
- антенна A2.2 = задняя антенна, расположена по центру, на расстоянии 60 мм от заднего края автомобиля.
В одном варианте осуществления некоторые детали определенных выше наборов данных не передаются. Вместо этого индивидуально передаваемый идентификатор транспортного средства каждого транспортного средства используется для получения других фрагментов информации, например тех, что относятся к внешним границам соответствующего автомобиля, из базы данных или с помощью алгоритма.
Каждое из двух задействованных транспортных средств может выполнять способ определения расстояния в соответствии со следующими принципами.
Транспортному средству 1 известно геометрическое смещение собственных антенн A1.1 и A1.2. Например, эти геометрические данные сохранены во внутренней памяти автомобиля. Транспортное средство 1 использует собственную антенну A1.2 для измерений позади него (т.е. для измерения расстояния до следующих за ним транспортных средств). Из различных сигналов DD-RS, передаваемых транспортным средством 2 в качестве физических опорных сигналов (по одному на антенну, установленную на транспортном средстве 2), и набора информации об измерении дальности, полученной по одному из физических каналов прямого соединения PSxCH, транспортному средству 1 известно, какой опорный сигнал антенны использовать (и каким пренебрегать) для измерения расстояния с учетом соответствующего геометрического смещения антенны, а именно передней антенны A2.1 со смещением 75 мм. Само измерение расстояния (то есть получение значения «DA1.2–A2.1») выполняется известными способами, например, путем вычисления из принятого сигнала DD-RS времени прохождения волны и умножения его на скорость света, и это не является частью данного изобретения.
VDlong = DA1.2–A2.1 - AO2.1long – AO1.2long
VDlong = DA1.2–A2.1 - (75 мм + 40 мм)
VDlong = DA1.2–A2.1 - 115 мм
Чтобы определить расстояние между двумя транспортными средствами, геометрические детали, относящиеся к другим антеннам (таким как антенна A2.2), не должны приниматься во внимание и опорные сигналы, передаваемые этими антеннами (например, антенной A2.2), не должны анализироваться. Уменьшаемое значение DA1.2–A2.1 представляет собой измеренное расстояние между антеннами A1.2 и A2.1, а вычитаемое значение в приведенной выше формуле представляет собой значение коррекции. Результат «VDlong» представляет собой расстояние между передним краем транспортного средства 2 и задним краем транспортного средства 1.
В приведенном выше иллюстративном синтаксисе Ax.y буква «x» представляет транспортное средство, а буква «y» указывает антенну, связанную с этим транспортным средством. Для передней антенны значение «y» установлено равным «1», для задней антенны значение «y» установлено равным «2». Разумеется, что возможны и другие синтаксические конструкции и/или другие значения.
Транспортное средство также может использовать различные идентификаторы антенн, принятые в качестве физических опорных сигналов от расположенных вблизи других транспортных средств, для извлечения необходимого набора (или нескольких наборов) информации об измерении дальности из базы данных, например, если передача информации об измерении дальности другими транспортными средствами в любом из физических каналов прямого соединения PSxCH через радиоинтерфейс PC5 была дефектной, или если передача вовсе не выполнялась. Идентификаторы антенны могут быть закодированы в виде указания или ссылки, например, указывающей на место хранения файла в хранилище данных. Указание или ссылка может состоять из формы универсального указателя ресурса (URL, Uniform Resource Locator) или его производных либо включать ее в себя. База данных может представлять собой логический объект, состоящий из нескольких распределенных объектов физической памяти, и любой набор информации об измерении дальности может храниться в ней частично или полностью. База данных может находиться в одном или нескольких транспортных средствах, или на каких-либо сторонних серверах в Интернете, или в обоих местах. Обращения к базе данных могут выполняться, например, на прикладном уровне, в частности, через радиоинтерфейс PC5, через радиоинтерфейс LTE Uu или через оба интерфейса.
На фиг. 3 показан пример сетки ресурсов для прямого соединения, в которой определенные ресурсные элементы (здесь по два для каждой антенны) зарезервированы для физических сигналов DD-RS, которые могут применяться для передачи идентификаторов антенны. Эти различные физические сигналы DD-RS распределены в иллюстративной ресурсной сетке для прямого соединения со смещением во временной области друг относительно друга, а разные символы из одного и того же физического сигнала DD-RS разнесены в частотной области. Ресурсный элемент Rx.1, используемый первой антенной Ax.1 для передачи своего уникального физического сигнала DD-RS, не используется второй антенной Ax.2 (и наоборот). Таким образом, приемной антенне не требуется оценивать качество всех пространственно разделенных ресурсов радиосвязи. Вместо этого от приемной стороны требуется выполнять измерения только в тех ресурсах, которые выделены релевантным сигналам DD-RS (и соответствующей антенне или нескольким антеннам), как указано в наборе информации об измерении дальности (в зависимости от варианта использования).
В другом примере некоторые или все антенны используют одни и те же частотно-временные ресурсы с разными сигналами DD-RS для каждой антенны. Это полезно, поскольку экономит ресурсы.
В еще одном примере все антенны используют один и тот же сигнал DD-RS, но разные частотно-временные ресурсы. Это полезно, поскольку приемник может быть более простым, так как для измерения расстояния до всех антенн будет использоваться единственный коррелятор, вместо одного коррелятора для каждой антенны. Для правильной работы этого способа необходимо четко определить, какая антенна использует каждый из частотно-временных ресурсов.
Набор информации (в основном, геометрической) об измерении дальности, например, полученный с более высоких уровней в стеке протоколов, может быть передан по любому из физических каналов прямого соединения PSxCH (например, по каналу PSSCH или PSBCH).
Возможный вариант кода в нотации ASN.1 для набора информации об измерении дальности приведен ниже. В этом примере с двумя антеннами на каждом транспортном средстве переменная «maxAntennas» принимает значение «2», так что часть, помеченная как «AntennaGeoDetails», появляется дважды, в первый раз для антенны Ax.1, например, передней антенны на транспортном средстве «x», а во второй раз для антенны Ax.2, например, задней антенны на транспортном средстве «x». Переменная «Antenna-ID» используется для определения корреляции сигнала DD-RS, передаваемого через опорные сигналы физического уровня, с помощью соответствующего набора (или нескольких наборов) информации об измерении дальности, передаваемого по любому из физических каналов прямого соединения PSxCH. Сигнал DD-RS формируется с использованием идентификатора антенны. Могут быть использованы любые последовательности с хорошими корреляционными свойствами, например, последовательности Задова-Чу, используемые в системе LTE для преамбул произвольного доступа (см. глава 5.7.2 TS 36.211 3GPP). В этом случае идентификатор антенны сопоставляется с одним корневым индексом последовательности «u» и одним значением для циклического сдвига «N_CS». Указанное сопоставление может быть статическим, т.е. оно может быть указано в стандарте и таблица сопоставления может храниться на мобильных устройствах, либо таблица сопоставления может передаваться на мобильные устройства, либо значения «u» и «N_CS» могут передаваться напрямую как часть информации об измерении дальности вместо передачи идентификаторов антенны.
-- ASN1START
RangingInformation::= SEQUENCE {
Vehicle-ID::= OCTET STRING,
VehicleType::= ENUMERATED {bicyle, motorcycle, midsize-car, fullsize-car, bus, truck, …},
Link::= OCTET STRING,
NumberOfAntennas::= ENUMERATED {1, 2, 4, 8},
Platooning::= SEQUENCE {
MemberOfPlatoon::= BOOLEAN,
PositionInPlatoon::= ENUMERATED {first, middle, last},
}
ShuntingSpace::= SEQUENCE {
ShuntingSpaceFront::= ENUMERATED {cm10, cm20, cm30, cm40, cm50, …},
ShuntingSpaceLeft::= ENUMERATED {cm10, cm20, cm30, cm40, cm50, …},
ShuntingSpaceRight::= ENUMERATED {cm10, cm20, cm30, cm40, cm50, …},
ShuntingSpaceRear::= ENUMERATED {cm10, cm20, cm30, cm40, cm50, …},
}
LoadingZone::= SEQUENCE {
LoadingZoneFront::= ENUMERATED {m0.5, m1, m1.5, m2, m2.5, m3, …},
LoadingZoneLeft::= ENUMERATED {m0.5, m1, m1.5, m2, m2.5, m3, …},
LoadingZoneRight::= ENUMERATED {m0.5, m1, m1.5, m2, m2.5, m3, …},
LoadingZoneRear::= ENUMERATED {m0.5, m1, m1.5, m2, m2.5, m3, …},
}
AntennaGeoDetailsList::= SEQUENCE (SIZE (1..maxAntennas)) OF AntennaGeoDetails
}
AntennaGeoDetails SEQUENCE {
Antenna-ID::= OCTET STRING,
AntennaType::= ENUMERATED {Static, Dynamic},
OperationMode::= ENUMERATED {On, Off},
Position::= ENUMERATED {front, left, right, rear, mid, upper, lower, …},
DetailedPosition::= ENUMERATED {front-left, front-centre, front-right, …, rear-left, rear-centre, rear-right},
FrontOffset::= ENUMERATED {mm5, mm10, mm15, mm20, mm25, mm30, …},
LeftOffset::= ENUMERATED {mm5, mm10, mm15, mm20, mm25, mm30, … },
RightOffset::= ENUMERATED {mm5, mm10, mm15, mm20, mm25, mm30, …},
RearOffset::= ENUMERATED {mm5, mm10, mm15, mm20, mm25, mm30, …},
Height::= ENUMERATED {mm100, mm200, mm300, mm400, mm500, …}
}
-- ASN1STOP
Приведенная выше структура в нотации ASN.1 также позволяет сформулировать дополнительные требования к пространству, которые транспортное средство может иметь для маневрирования или погрузки/разгрузки товаров.
Фрагмент информации «Link» (ссылка) может содержать ссылку (например, ссылку в виде URL на конкретную модель) для запросов к базе данных, как описано выше. Следовательно, некоторые части предложенной выше структуры, в качестве альтернативы, могут быть получены из такой базы данных.
Каждое транспортное средство передает индивидуальный набор информации об измерении дальности. В одном варианте осуществления изобретения такой индивидуальный набор может быть связан с сообщением об обнаружении прямого соединения или с сообщением RRC SidelinkUEInformation (или включен в него). В другом варианте осуществления изобретения этот индивидуальный набор может быть частью нового вида сообщения, специально определенного для целей измерения дальности (или связан с ним).
Два фрагмента информации «AntennaType» и «OperationMode» включены в этот пример с учетом описанного ниже варианта использования, в котором внешние границы транспортного средства могут динамически изменяться, например, когда грузовик с прицепом совершает поворот.
Как указано выше, четвертым аспектом изобретения является активация и деактивация сигналов по мере необходимости. На фиг. 4 показан иллюстративный поток сигналов между транспортными средствами 1 и 2.
Транспортное средство 1 может запрашивать (сообщением «Turn On Ranging» (включить измерение дальности)) передачу по меньшей мере одного из двух фрагментов информации от транспортного средства 2, а именно набора информации (в основном геометрической) об измерении дальности и/или идентификаторов антенн. Набор информации может быть принят с более высоких уровней стека протоколов и передан через радиоинтерфейс PC5 по любому из физических каналов прямого соединения PSxCH (например, он может быть связан с сообщением об обнаружении прямого соединения или с сообщением RRC SidelinkUEInformation либо включен в него; в качестве альтернативы, он может быть частью нового вида сообщения, специально определенного для целей измерения дальности). Идентификатор антенны может быть непосредственно внедрен на физическом уровне в качестве опорных сигналов. Порядок этих двух различных видов информации, показанных на фиг. 4, выбран произвольно и он может отличаться в вариантах практической реализации. Транспортное средство 1 может запрашивать эти два фрагмента информации от транспортного средства 2 один или несколько раз. Соответственно, каждый фрагмент информации может передаваться только один раз или он может передаваться несколько раз. Для простоты на фиг. 4 это не показано.
Инициирующее сообщение («Turn On Ranging»), отправленное транспортным средством 1, может быть передано нескольким транспортным средствам в виде широковещательного сообщения для прямого соединения через интерфейс PC5. В другом варианте осуществления инициирующее сообщение, отправленное транспортным средством 1, передается одному транспортному средству в виде адресного сообщения для прямого соединения через интерфейс PC5.
На основе информации, полученной от транспортного средства 2, транспортное средство 1 может выбрать соответствующую антенну (или несколько антенн) A2.y для измерений дальности и применить значение коррекции для правильного измерения расстояния между этими транспортными средствами, как описано выше.
Последовательность сообщений, показанная на фиг. 4, оканчивается сообщением завершения («Turn Off Ranging» (выключить измерение дальности)), которое может быть передано транспортным средством 1 через интерфейс PC5 нескольким транспортным средствам в виде широковещательного сообщения для прямого соединения или одному транспортному средству в виде адресного сообщения для прямого соединения.
В еще одном варианте осуществления изобретения относительная скорость двух транспортных средств (т.е. разница в скорости между двумя транспортными средствами) используется для изменения скорости передачи символов опорных сигналов. Относительная скорость может быть получена, например, следующим образом. Транспортное средство 1 может информировать (см. «индикатор № 1 скорости» на фиг. 5) транспортное средство 2 о своей скорости V1 (или о необходимой периодичности для передачи набора информации (в основном, геометрической) об измерении дальности и/или сигналов DD-RS). Затем транспортное средство 2 может вычислить относительную скорость VR транспортных средств и использовать это значение для управления схемой передачи сигналов DD-RS собственными антеннами A2.y. На следующем этапе транспортное средство 2 может информировать транспортное средство 1 о собственной скорости V2 или об относительной скорости VR, или об обеих скоростях (см. индикатор № 2 скорости на фиг. 5). Транспортное средство 1, в свою очередь, может самостоятельно вычислить относительную скорость VR' (и проверить относительную скорость VR, полученную от транспортного средства 2) и использовать результат этих вычислений для управления схемой передачи сигналов DD-RS собственными антеннами A1.y. При необходимости транспортное средство 1 может информировать транспортное средство 2 о результатах проверки и, по возможности, предоставлять измененную относительную скорость VR* транспортному средству 2 (см. индикатор № 3 скорости на фиг. 5). Эта обратная связь может использоваться для точной настройки схемы передачи сигналов DD-RS от транспортного средства 2. В другом примере относительная скорость определяется на основе доплеровской частоты принятых сигналов прямого соединения. В еще одном примере относительная скорость вычисляется из изменений во времени измеренного расстояния.
Последовательность сообщений, показанная на фиг. 5, может повторяться несколько раз, частично или полностью. Транспортные средства также могут согласовывать продолжительность передачи последовательности сигналов DD-RS с неизменной периодичностью. Для простоты на фиг. 5 это не показано.
В этом случае относительные скорости VR, VR' или VR* этих двух транспортных средств могут быть использованы для определения периодичности передачи идентификаторов антенн. Это означает, что если транспортное средство 1 движется с низкой скоростью, а транспортное средство 2 движется с высокой скоростью, то может потребоваться увеличение частоты передачи различных сигналов DD-RS разными антеннами. С другой стороны, если транспортное средство 1 движется с некоторой скоростью и транспортное средство 2 движется с близкой скоростью, то частота передачи различных сигналов DD-RS разными антеннами может быть уменьшена. Для этого могут быть предусмотрены и использованы в соответствующих транспортных средствах пороговые значения, относящиеся к относительной скорости транспортных средств, для управления схемами положения сигналов DD-RS в сетке ресурсов, а также скоростью передачи символов (то есть периодичностью передачи).
В качестве альтернативы или в дополнение к относительной скорости, изменение скорости передачи символов и/или схемы положения для внедрения сигналов во временной области может регулироваться в зависимости от скорости соответствующего транспортного средства относительно земли, например, таким образом, чтобы для быстро движущихся транспортных средств передавалось больше символов DD-RS, а для медленно движущихся или стоящих транспортных средств - меньше.
В зависимости от вида транспортного средства, могут существовать статические и динамические конфигурации антенн для данного способа, как описано ниже.
На фиг. 6 показана комбинация тягача и прицепа в движении по кривой. Как видно из фиг. 6, внешние границы этого транспортного средства динамически изменяются при движении транспортного средства. Например, в зоне Z1 появляются новые края. Поэтому еще одним аспектом настоящего изобретения является активация и деактивация антенн в динамическом режиме, чтобы охватить случаи, подобные случаю, показанному на фиг. 6.
Изменение внешних границ транспортного средства можно обнаружить, выполнив измерение расстояния между антеннами, связанными с одним транспортным средством (здесь комбинация тягача и прицепа, показанная на фиг. 6, рассматривается как одно транспортное средство). В случае примера, показанного на фиг. 6, антенны A2.1 и A1.2 обнаружат, что они приближаются друг к другу, когда комбинация тягача и прицепа поворачивает направо. Аналогично, антенны A2.4 и A1.3 в той же ситуации могут обнаружить, что они удаляются друг от друга.
Таким образом, дополнительным аспектом настоящего изобретения является измерение расстояния между транспортными средствами (то есть настройка соответствующих антенн, установленных на одном транспортном средстве, с помощью опорных сигналов, чтобы они могли определять расстояние между этими антеннами). В качестве альтернативы, угол поворота α в соединении может быть использован для обнаружения изменения внешних границ транспортного средства.
Можно предположить, что в зоне Z1 антенны A1.2 (левая задняя антенна тягача) и A2.1 (левая передняя антенна прицепа) установлены по краям, чтобы их можно было легко использовать в этом способе - они просто должны быть активированы, если не использовались до сих пор.
В отношении вышеизложенного следует понимать, что названия и варианты кодирования фрагментов информации (IE, Information Elements), приведенные в настоящем документе, служат лишь в качестве примеров. Существует много других вариантов кодирования параметров и их значений. Настоящее изобретение никак не ограничено раскрытыми здесь примерами кодирования.
Кроме того, эти параметры могут быть подразделяться тем или иным способом, например, они могут быть сопоставлены в новой или уже существующей иерархической структуре или сгруппированы с другими фрагментами информации, например, в виде списка.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОДАВЛЕНИЯ ПОМЕХ И ПРИЕМА СИГНАЛА В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2015 |
|
RU2648984C1 |
| УЛУЧШЕННОЕ РАСПРЕДЕЛЕНИЕ РАДИОРЕСУРСОВ ДЛЯ СВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2016 |
|
RU2710283C1 |
| КОНФИГУРАЦИИ ЧАСТИ СИГНАЛА ДЛЯ СВЯЗИ ПО ТЕХНОЛОГИИ V2X | 2019 |
|
RU2793335C2 |
| УЛУЧШЕННЫЕ НАЧАЛЬНЫЕ И ПОВТОРНЫЕ ПЕРЕДАЧИ ДАННЫХ ДЛЯ V2X-ПЕРЕДАЧ | 2017 |
|
RU2733420C2 |
| УЛУЧШЕННОЕ ЗОНДИРОВАНИЕ И ВЫБОР РЕСУРСОВ РАДИОСВЯЗИ ДЛЯ ПЕРЕДАЧ V2X | 2016 |
|
RU2718228C1 |
| ТЕРМИНАЛ И СПОСОБ СВЯЗИ | 2020 |
|
RU2790324C1 |
| ТЕРМИНАЛ, БАЗОВАЯ СТАНЦИЯ И СПОСОБ СВЯЗИ | 2017 |
|
RU2729208C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИНФОРМАЦИИ О СОСТОЯНИИ КАНАЛА В БЕСПРОВОДНОЙ СИСТЕМЕ СВЯЗИ | 2013 |
|
RU2600569C2 |
| УЛУЧШЕННАЯ ПОДДЕРЖКА КАЧЕСТВА ОБСЛУЖИВАНИЯ ДЛЯ ПЕРЕДАЧ V2X | 2017 |
|
RU2766567C2 |
| СПОСОБ ПЕРЕДАЧИ/ПРИЕМА СИГНАЛА СИНХРОНИЗАЦИИ ДЛЯ СВЯЗИ D2D В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ И АППАРАТУРА ДЛЯ ЭТОГО | 2015 |
|
RU2643351C1 |
Изобретение относится к области устройств пользователя для обеспечения информации о местоположении транспортного средства. Техническим результатом является расширения арсенала способов измерения расстояний (в частности, через радиоинтерфейс PC5 для услуг V2X) с целью надежного измерения расстояний до внешних границ и краев транспортного средства, а не расстояний до антенны с неопределенным местом установки. Способ передачи информации о местоположении транспортного средства, в котором сигналы передаются по меньшей мере одной установленной на транспортном средстве антенной для указания местоположения транспортного средства другому объекту, при этом сигналы содержат информацию, относящуюся к идентификатору по меньшей мере одной антенны, и/или информацию о смещении по меньшей мере одной антенны относительно границы транспортного средства, при этом информация, относящаяся к идентификатору, позволяет другому объекту определять информацию о смещении по меньшей мере одной антенны относительно границы транспортного средства. 12 з.п. ф-лы, 6 ил.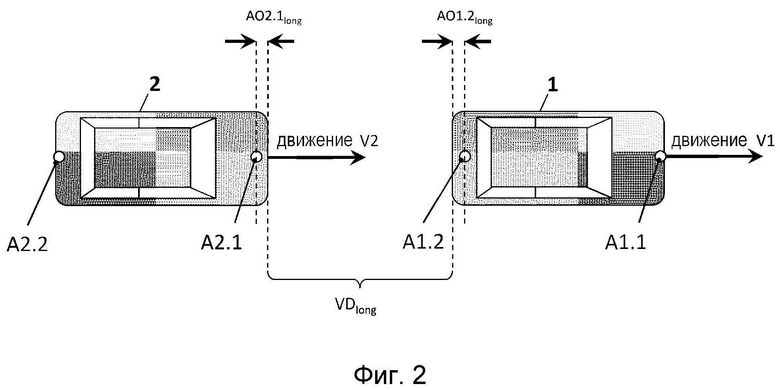
1. Способ передачи информации о местоположении транспортного средства, в котором сигналы передаются по меньшей мере одной установленной на транспортном средстве антенной для указания местоположения транспортного средства другому объекту, при этом сигналы содержат информацию, относящуюся к идентификатору по меньшей мере одной антенны, и/или информацию о смещении по меньшей мере одной антенны относительно границы транспортного средства, при этом информация, относящаяся к идентификатору, позволяет другому объекту определять информацию о смещении по меньшей мере одной антенны относительно границы транспортного средства.
2. Способ по п. 1, в котором сигналы содержат информацию, относящуюся к идентификатору по меньшей мере одной антенны, и информацию о смещении по меньшей мере одной антенны относительно соответствующей границы транспортного средства.
3. Способ по п. 1 или 2, в котором информация, относящаяся к идентификатору по меньшей мере одной антенны, содержит по меньшей мере одно из следующего: идентификатор антенны, указание положения антенны относительно транспортного средства, вид транспортного средства, идентификатор транспортного средства и количество антенн на транспортном средстве.
4. Способ по любому из предшествующих пунктов, в котором информация о смещении по меньшей мере одной антенны относительно границы транспортного средства включает в себя информацию, относящуюся к идентификатору транспортного средства, достаточную для того, чтобы другой объект мог получить информацию о положении по меньшей мере одной антенны.
5. Способ по любому из предшествующих пунктов, в котором сигналы передаются в виде сигналов для прямого соединения через радиоинтерфейс PC5, и при этом разные антенны транспортного средства выполнены с возможностью передачи таким образом, что первая антенна использует первый ресурсный элемент, а вторая антенна использует второй ресурсный элемент, отличный от первого ресурсного элемента.
6. Способ по п. 5, в котором сигналы передаются в качестве опорных сигналов для измерения расстояний, при этом сигналы первой антенны передаются в первом временном интервале, а сигналы второй антенны передаются во втором временном интервале.
7. Способ по любому из предшествующих пунктов, в котором сигналы передаются в ответ на прием транспортным средством сообщения от объекта, запрашивающего у транспортного средства передачу информации о местоположении.
8. Способ по п. 7, в котором сигналы повторно передаются до тех пор, пока транспортное средство не примет сообщение от объекта, запрашивающего у транспортного средства прекращение передачи информации о местоположении.
9. Способ по любому из предшествующих пунктов, в котором сигналы передаются с переменной частотой, зависящей от разницы скорости между транспортным средством и объектом.
10. Способ по любому из предшествующих пунктов, в котором информация о смещении по меньшей мере одной антенны относительно границы транспортного средства зависит от текущей ориентации транспортного средства относительно объекта.
11. Способ по п. 10, в котором активируются дополнительные антенны, если транспортное средство меняет ориентацию относительно объекта.
12. Способ по любому из предшествующих пунктов, в котором сигналы передаются с использованием по меньшей мере одного из следующего: опорные сигналы демодуляции, сигналы синхронизации прямого соединения и опорные сигналы для измерения расстояний.
13. Способ по любому из предшествующих пунктов, в котором объект представляет собой второе транспортное средство.
| WO 2017007285 A1, 12.01.2017 | |||
| WO 2016159712 A1, 06.10.2016 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ ДЛЯ СИСТЕМ ЛОКАЛЬНОЙ НАВИГАЦИИ | 2015 |
|
RU2588057C1 |
| СОТОВАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ, КОМПЕНСИРУЮЩАЯ ЗАДЕРЖКИ ПРИНИМАЕМЫХ СИГНАЛОВ В РАДИОПРИЕМНИКАХ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ | 1998 |
|
RU2221257C2 |

