Изобретение, в целом, относится к системам связи и, более конкретно, к компенсации задержек принимаемых сигналов в радиоприемниках определения местоположения.
Развитие коммерческой радиосвязи и, в частности, бурное развитие сотовых радиотелефонных систем изменило характер осуществления связи между людьми. Согласно одному исследованию около 80% людей, приобретающих блоки мобильной связи и абонирующих обслуживание, делают это для повышения личной безопасности. По-видимому, многие абоненты рассчитывают воспользоваться своими мобильными блоками в критической ситуации, например, при внезапной поломке автомобиля или в чрезвычайных обстоятельствах, когда требуется срочно вызвать врача или полицию. В таких обстоятельствах желательно, чтобы система радиосвязи могла определить местоположение мобильного блока, особенно, в случае, когда абонент сам точно не знает, где находится. Кроме того, ожидается, что ФКС (Федеральная комиссия связи) вскоре выдвинет требование, чтобы операторы сети пересылали данные о местонахождении вызывающего абонента, находящегося в опасности, в службу экстренной помощи.
Существует много методов генерирования информации о местоположении мобильного блока. Одна из систем определения местоположения предусматривает, что мобильный блок имеет возможность самостоятельно оценивать свое местоположение и посылать сообщение со своими координатами при вызове экстренной помощи. Эту функцию можно реализовать, например, снабдив мобильный блок приемником Глобальной спутниковой системы радиоопределения (GPS, ГССР), который принимает информацию о местоположении от спутниковой сети ГССР. Тогда мобильный блок сможет передавать эту информацию системе, которая, в свою очередь, будет пересылать ее в службу экстренной помощи. Однако, для этого потребуется значительно модифицировать имеющиеся мобильные блоки с целью включения в их состав приемников ГССР, а также ввести дополнительную сигнализацию между мобильными блоками и базовыми станциями.
С другой стороны, для определения местоположения мобильного блока можно использовать базовые станции, которые передают сигналы на мобильные блоки и принимают сигналы от них. Для выдачи информации о местоположении мобильного блока можно использовать различные методики, в том числе те, что основаны на измерении ослабления сигнала мобильного блока, угла прихода и разности между временами прихода (РВП) сигнала мобильного блока на разных базовых станциях. См. , например, статью Луиса А. Стилпа (Louis A. Stilp), озаглавленную "Time difference of Arrival Technology for Locating Narrowband Cellular Signals", SPIE, том 2602, стр. 134-144. Для поиска мобильных блоков в системах радиосвязи можно использовать и другую систему, которая представляет собой дополнительную систему, действующую независимо от системы радиосвязи. Дополнительная система включает в себя свои собственные базовые станции, предназначенные для поиска мобильного блока. Хотя дополнительная система может использовать различные схемные элементы (например, антенну) совместно с системой радиосвязи, однако обработку сигналов она производит отдельно. Такой подход не обладает преимуществом, например, как рациональное решение проблемы выдачи информации о местоположении мобильного блока без модификации большого числа имеющихся базовых станций системы.
Для определения местоположения мобильного блока, подлежащего обнаружению, некоторые алгоритмы определения местоположения основаны на времени прихода принимаемого сигнала, сообщаемом, по меньшей мере, тремя радиоприемниками определения местоположения, находящимися в трех или более местах. Путем обработки времен прихода, местоположение мобильного блока, подлежащего обнаружению, определяется посредством известного алгоритма определения местоположения с помощью окружностей постоянного радиуса. Этот алгоритм опирается на точку пересечения, по меньшей мере, трех окружностей, радиусы которых соответствуют временам прихода, сообщенным приемниками определения местоположения.
Однако фактически, радиоприемник определения местоположения определяет время детектирования, соответствующее времени, когда принимаемый сигнал мобильного блока, подлежащего обнаружению, детектируется, а не времени, когда принимаемый сигнал действительно приходит на радиоприемник определения местоположения. Время детектирования - это время, когда принимаемый сигнал выходит из детектора приемника, пройдя через различные приемные каскады ВЧ и ПЧ, которые добавляют задержки сигнала к детектированию принимаемого сигнала. В идеальных условиях различие между временем детектирования и временем прихода не имело бы значения. Поскольку каждый приемник данной системы определения местоположения вносил бы задержку одной и той же величины, ее можно было бы легко исключить посредством системного алгоритма определения местоположения. Однако, в силу наличия допусков на схемные элементы, было бы неверно предполагать, что разные приемники определения местоположения имеют равные задержки.
Например, некоторые виды фильтров ПЧ сильно отличаются друг от друга по групповой задержке - времени, необходимому для распространения энергии через фильтр - даже при номинально идентичных схемных элементах. Из опытных данных следует, что керамические фильтры, которые широко используются в приемниках ввиду их приемлемых стоимостных и рабочих показателей, показывают отклонения групповой задержки, примерно, ±100 нс от среднего значения. В результате, различные неопределенности и допуски оказывают влияние на определение местоположения, что приводит к неточности и неоднозначности местоположения. Если даже все остальные условия работы системы определения местоположения идеальны, 100-наносекундная неопределенность времени прихода принимаемого сигнала вносит в определение местоположения неопределенность, составляющую около 30 м (около 100 футов). На фиг.1 неопределенность местоположения, обусловленная разбросом в ±100 нс, изображена в виде области, обозначенной сеткой, между точками пересечения окружностей, соответствующих временам прихода на первый радиоприемник определения местоположения и на второй радиоприемник определения местоположения, которые используются для определения местоположения мобильного блока. Каждый радиоприемник определения местоположения представлен двумя концентрическими окружностями, радиусы которых представляют неопределенность в ±100 нс. Таким образом, радиоприемники определения местоположения, в состав которых входят схемные элементы, например, фильтры ПЧ, имеющие максимальное распределение допуска, обуславливают ошибку и неоднозначность в определении системой местоположения мобильного блока порядка нескольких сотен футов. Поэтому необходимо обеспечить такую систему определения местоположения, которая компенсировала бы неопределенность местоположения, обусловленную допусками на схемные элементы радиоприемников определения местоположения.
Настоящее изобретение, которое решает эту задачу, реализовано в системе определения местоположения, которая повышает точность определения местоположения путем измерения и предварительного сохранения задержек сигнала, связанных с радиоприемниками определения местоположения. Соответственно, система определения местоположения, предназначенная для поиска мобильного блока, согласно настоящему изобретению, включает в себя детектор, который детектирует радиосигнал мобильного блока, принимаемый соответствующим радиоприемником определения местоположения, и таймер, который определяет время детектирования, связанное с принимаемым сигналом. Процессор определяет время прихода принимаемого радиосигнала на основании времени детектирования и измеренной или вычисленной задержки сигнала, предварительно сохраненной в элементе хранения. Обнаружитель мобильного блока обрабатывает времена прихода, полученные от совокупности радиоприемников определения местоположения, с целью обнаружения мобильного блока.
Согласно более детально раскрытым признакам настоящего изобретения, задержка сигнала включает в себя измеренную или вычисленную групповую задержку, связанную с фильтром, входящим в состав одного из приемных каскадов, и измеренную или вычисленную задержку линии передачи, связанную с линией передачи, входящей в состав радиоприемника. Предпочтительно, чтобы время прихода определялось на основании разности между задержкой сигнала и временем детектирования. Однако, согласно приведенному в качестве примера варианту реализации, время прихода можно определять на основании времени детектирования и значения дельта, получаемого из разности задержки сигнала относительно номинального значения.
Другие признаки и преимущества настоящего изобретения очевидны из нижеследующего описания предпочтительного варианта осуществления, приводимого в совокупности с прилагаемыми чертежами, на которых:
фиг.1 - диаграмма, представляющая неточность местоположения, связанную с определением местоположения мобильного блока при использовании общепринятого радиоприемника определения местоположения;
фиг. 2 - схема системы определения местоположения, в которой реализовано настоящее изобретение;
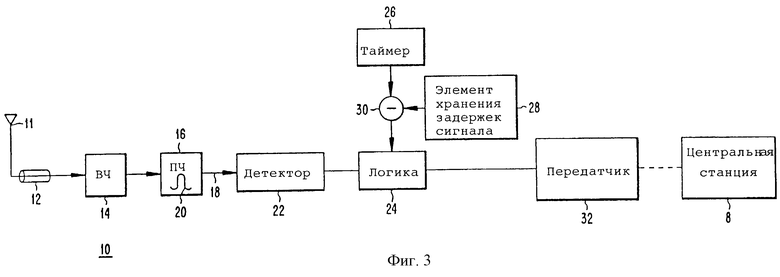
фиг.3 - схема радиоприемника определения местоположения, используемого в системе, представленной на фиг.2;
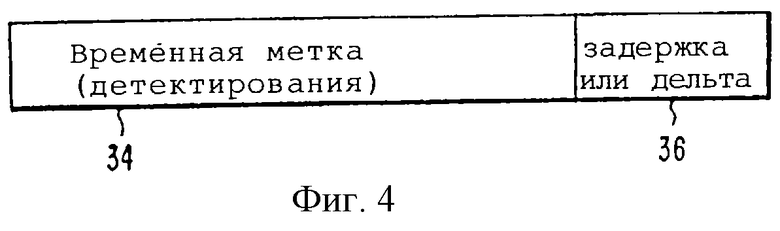
фиг. 4 - диаграмма сообщения задержки, используемого для передачи задержки сигнала, связанной с приемником, представленным на фиг.3.
На фиг. 2 представлена система 1 определения местоположения, в которой реализовано настоящее изобретение. Согласно примеру варианта осуществления, система 1 определения местоположения представляет собой дополнительную систему определения местоположения, аналогичную той, что раскрыта в патенте США 5327144, выданном Стилпу и др. , озаглавленном "Система обнаружения местоположения сотовых телефонов" ("Cellular Telephone Location System"), содержание которого включено в данное описание посредством ссылки. Как очевидно из дальнейшего рассмотрения, настоящее изобретение может быть реализовано не только в дополнительных системах определения местоположения, но и в недополнительных системах определения местоположения. Система 1 определения местоположения включает в себя три радиоприемника 2, 3, 4 определения местоположения, которые не обязательно находятся там же, где находятся базовые станции сотовой системы радиосвязи, в которой обслуживаются абонентские мобильные блоки. Кроме того, на фигуре представлена базовая станция 5 сотовой системы, которая поддерживает радиосвязь в соте 6, в частности, с мобильным блоком 7, местоположение которого необходимо определить в соответствии с настоящим изобретением. Радиоприемники 2, 3 и 4 определения местоположения отслеживают обращения мобильного блока 7 к системе. Когда мобильный блок 7 осуществляет экстренное обращение, система 1 определения местоположения обрабатывает времена прихода сигналов, принимаемых от мобильного блока 7 приемниками 2, 3 и 4 определения местоположения, чтобы определить местоположение мобильного блока 7 с использованием, например, общеизвестного алгоритма определения местоположения с помощью окружностей постоянного радиуса. Согласно приведенному в качестве примера варианту осуществления, обработка времен прихода, получаемых от радиоприемников 2, 3, 4 определения местоположения, производится на центральной станции 8, которая сообщает информацию о местоположении мобильного блока 7 в центр 9 экстренной помощи.
Согласно настоящему изобретению, измеренная или вычисленная задержка сигнала, связанная с одним или несколькими приемными каскадами радиоприемников 2, 3, 4 определения местоположения, предварительно сохраняется либо на каждом из радиоприемников определения местоположения, либо на центральной станции 8. При определении местоположения мобильного блока 7, обнаружитель 15 местоположения мобильного блока, входящий в состав центральной станции 8, обрабатывает времена прихода, получаемые на основании задержек сигнала на соответствующих радиоприемниках определения местоположения. Поэтому, в отличие от общепринятых способов, при определении местоположения в соответствии с настоящим изобретением учитывают предварительно сохраненные отклонения задержек сигнала, связанные с радиоприемниками определения местоположения. Измеряя и предварительно сохраняя задержки сигнала, система определения местоположения, в которой реализовано изобретение, может точно обнаружить местоположение мобильного блока 7 без внесения неопределенности, связанной с допусками на схемные элементы радиоприемников 2, 3, 4 определения местоположения.
На фиг.3 представлена схема радиоприемника 10 определения местоположения системы определения местоположения. Радиоприемник 10 определения местоположения включает в себя совокупность приемных каскадов, каждый из которых может вносить измеримые задержки сигнала в детектирование принимаемого сигнала. Согласно представленному на фигуре, приемная антенна 11 принимает сигнал, переданный от мобильного блока 7 (по фиг.2), и подает его на каскад 14 ВЧ через линию передачи 12. Общеизвестно, что линия передачи 12, соединяющая антенну 11 с каскадом 14 ВЧ, задерживает принимаемый сигнал, внося в него задержку линии передачи. Каскад 14 ВЧ, который обеспечивает предварительное усиление и избирательность приемника, подает принимаемый сигнал на каскад 16 ПЧ с целью преобразования с понижением частоты, осуществляемого общеизвестным способом. Каскад 16 ПЧ выдает сигнал ПЧ в линию 18, по которой передается информация, содержащаяся в принимаемом сигнале. Для выдачи сигнала ПЧ каскад 16 ПЧ использует фильтр 20 ПЧ, например, керамический фильтр, который вносит дополнительную групповую задержку. Поэтому, задержка принимаемого сигнала включает в себя как задержку линии передачи, так и групповую задержку. Сигнал ПЧ поступает на детектор 22, который детектирует принимаемый сигнал на время детектирования. Радиоприемники определения местоположения измеряют время детектирования с использованием общеизвестной логической схемы 24 и таймера, например, синхроэлемента 26, образующих детектор, который измеряет время детектирования, соответствующее времени, когда принимаемый радиосигнал детектируется на одном из приемных каскадов.
Согласно настоящему изобретению, задержка линии передачи и групповая задержка измеряются или вычисляются согласно общеизвестным способам, которые определяют задержку принимаемого сигнала, связанную с каскадами ВЧ. Например, задержка сигнала для каждого из радиоприемников 2, 3, 4 определения местоположения может быть измерена во время изготовления или во время монтажа техническим персоналом, который использует двухканальный осциллограф или автоматизированные средства. Задержка линии передачи может измеряться или вычисляться на основании длины линии и скоростного коэффициента. Значение задержки сигнала, которое обычно находится в наносекундном диапазоне, предварительно сохраняется в элементе 28 хранения задержки сигнала, предпочтительно, в виде двоично-кодированного десятичного числа. Элемент 28 хранения может представлять предварительно сохраненное двоично-кодированное десятичное число посредством DIP-переключателя или посредством двоичных байтов или слов, хранящихся в энергонезависимом запоминающем элементе.
Согласно приведенному в качестве примера варианту осуществления изобретения, радиоприемник 10 определения местоположения вычитает, с использованием вычитателя 30, предварительно сохраненную задержку сигнала из времени детектирования с целью определения фактического времени прихода принимаемого сигнала. При такой компоновке радиоприемник 10 определения местоположения сообщает время прихода на центральную станцию 8 для его совместной обработки с временами прихода, поступающими от других аналогичных радиоприемников определения местоположения. Радиоприемник определения местоположения сообщает время прихода посредством передатчика 32, который осуществляет связь с центральным контроллером посредством либо проводной, либо беспроводной среды передачи.
Согласно одному из вариантов осуществления изобретения, радиоприемник 10 определения местоположения посылает задержку сигнала на центральную станцию 8 совместно со временем детектирования. Например, согласно одному из вариантов осуществления радиоприемник 10 определения местоположения передает на центральную станцию 8 закодированное в цифровую форму сообщение задержки, имеющее два поля. Как представлено на фиг.4, в первом поле 34 передают задержку сигнала на приемнике. Согласно другому варианту осуществления, второе поле 36 может содержать значение дельта, соответствующее разности между задержкой сигнала относительно номинального значения. При такой компоновке центральная станция 8 отвечает за вычитание задержки сигнала из времени детектирования для определения времени прихода. Радиоприемник 10 определения местоположения может передавать сообщение задержки на центральную станцию 8 время от времени или периодически с целью предоставления обновленной информации о местоположении. При такой компоновке центральная станция 8, которая может сохранять переданные сообщения задержки, вычитает предварительно сохраненную задержку сигнала из периодически обновляемых времен детектирования для непрерывного определения времен прихода.
Вернемся к фиг. 2. Согласно другому аспекту настоящего изобретения, центральная станция 8 включает в себя центральный элемент 38 хранения, предназначенный для хранения задержки сигнала, связанной с каждым из радиоприемников определения местоположения. Согласно этому аспекту изобретения, задержка сигнала определяется во время монтажа системы с использованием источника опорного сигнала, находящегося в известном местоположении, например, равноотстоящем от всех приемников определения местоположения. Определяя времена прихода от источника опорного сигнала, можно измерить задержку сигнала, связанную с каждым из радиоприемников определения местоположения. Задержки сигнала на радиоприемниках 2, 3 и 4 определения местоположения могут сохраняться в центральном элементе 38 хранения. Затем сохраненные задержки сигнала могут быть извлечены обнаружителем 15 местоположения мобильного блока, который также принимает времена детектирования, передаваемые радиоприемниками 2, 3, 4 определения местоположения, в ходе обработки времен прихода, с целью поиска мобильного блока 7.
Из вышеприведенного описания очевидным является, что настоящее изобретение обеспечивает повышение точности алгоритмов определения местоположения, которые используют времена прихода для обнаружения мобильных блоков, путем исключения отклонений, связанных с допусками на схемные элементы, используемые в радиоприемниках определения местоположения. Таким образом, настоящее изобретение можно использовать в любых системах связи, дополнительных или недополнительных, чтобы точно находить местоположение мобильного блока.
Хотя в описании изобретения приведены ссылки только на предпочтительный вариант осуществления, для специалистов в данной области техники очевидным является, что допустимы различные модификации, не выходящие за рамки сущности изобретения.

Изобретение относится к радиотехнике и может быть использовано в системах связи для компенсации задержек принимаемых сигналов в радиоприемниках определения местоположения. Технический результат заключается в повышении точности определения местоположения. Система определяет времена детектирования принимаемых радиосигналов на радиоприемниках определения местоположения и учитывает предварительно сохраненные задержки сигнала, связанные с одним или несколькими приемными каскадами соответствующих радиоприемников определения местоположения, и времена детектирования, с целью определения времен прихода принимаемых радиосигналов. 4 с. и 24 з.п. ф-лы, 4 ил.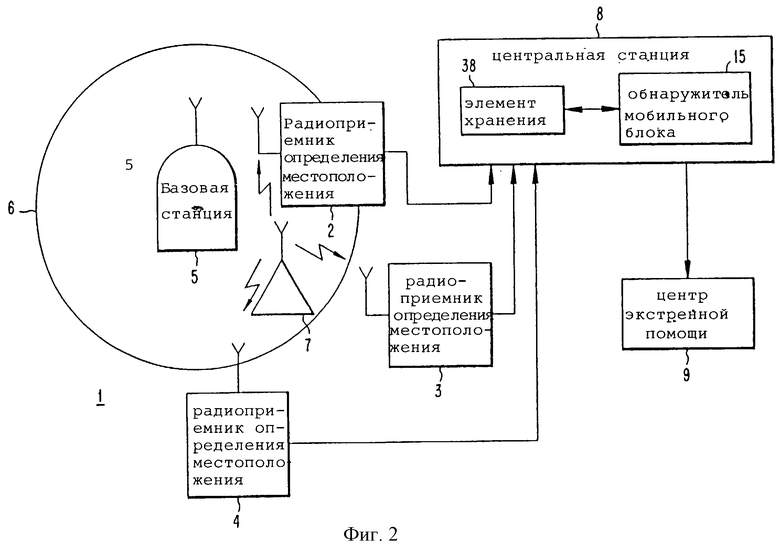
| US 5144315 A, 01.09.1992 | |||
| US 5058200 А, 15.10.1991 | |||
| DE 4005368 A, 22.08.1991 | |||
| US 3780370, 18.12.1973 | |||
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 1996 |
|
RU2082279C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИФФЕРЕНЦИАЛЬНЫХ ПОПРАВОК | 1990 |
|
RU2012012C1 |
