Область техники, к которой относится изобретение
Настоящее изобретение относится к дистанционно управляемой роликовой конструкции, встраиваемой в устройство, чтобы перемещать указанное устройство по поверхности. Изобретение также относится к способу и системе для автоматического перемещения группы устройств в соответствии с заданными сценариями. Перемещаемыми устройствами могут быть, например, предметы мебели и стеночные элементы.
Уровень техники
Во многих случаях требуется передвигать предметы мебели, чтобы получить доступ к пространству пола, на котором они размещены. Причиной может быть, например, уборка пространства пола, где размещена мебель. Чтобы облегчить перемещение предмета мебели, его можно снабдить различными типами колес.
Существуют также другие типы устройств, которые могут быть оснащены колесами, облегчающими перемещение. Эти устройства могут быть, например, легкими перегородками. Перемещая их, можно изменить внутреннюю планировку этажа. Возможны и другие случаи, когда может потребоваться переместить подобные конструктивные элементы.
Заявитель ранее разработал роликовое устройство, которое можно встроить в устройства, такие как предмет мебели, подвижная стенка и т.д., для перемещения устройства по поверхности, и которое может использоваться любым человеком независимо от его физического состояния и возможности поднять различные устройства, в которые встроено роликовое устройство. Это устройство раскрыто в норвежском патенте NO 316760 В1.
Указанное роликовое устройство содержит устройство с цилиндрической втулкой, которое расположено, например, в ножке предмета мебели, и поршень, который подвижно установлен в устройстве с цилиндрической втулкой. Шарообразное или сферическое колесо расположено в поршне. Поршень с помощью защелкивающей системы, содержащей пружину, может перемещаться между верхним положением и нижним положением. Когда поршень находится в нижнем положении, предмет мебели можно катить по полу, на котором он стоит, а когда поршень находится в верхнем положении, колесо находится внутри устройства с цилиндрической втулкой и ножки предмета мебели, в котором расположено роликовое устройство, и поэтому стоит на полу. Таким образом, предмет мебели стоит в требуемом положении без возможности случайно покатиться по полу, когда к предмету мебели прикладывают небольшие усилия. Это решение является полностью механическим.
Заявитель дополнительно разработал концепцию и обеспечил роликовое устройство с системой автоматического привода для перемещения поршня с роликовым элементом между верхним и нижним положением. Верхнее положение является пассивным неподвижным положением, а нижнее положение является активным положением для перемещения роликового устройства по поверхности. Привод может управляться беспроводным образом.
Даже если роликовым устройством можно управлять дистанционно для перехода между верхним и нижним положениями, как раскрыто выше, указанное роликовое устройство все равно нужно толкать или направлять в требуемом направлении для его перемещения между различными положениями на поверхности.
Настоящее изобретение является дальнейшим развитием указанной концепции, при этом роликовым устройством управляют для автоматического перемещения из одного положения в другое.
Различные устройства для манипулирования объектами и их перемещения раскрыты в уровне техники. Одним из примеров является тележка на колесах. Ее можно использовать для переноски и перемещения различных объектов. Тележкой можно управлять дистанционно, или она может следовать по заданному маршруту в соответствии, например, с направляющими на полу в зоне, где она функционирует.
Другой пример представлен в публикации Zhidong Wang et al.: Realizing cooperative object manipulation using multiple behaviour-based robots», Intelligent Robots and Systems '96, IROS 96, Proceedings of the 1996 L EEE / RSJ International Conference on Osaka, Japan, 4-8 Nov, New York, NY, USA, IEEE, US, vol. 1, 4 November 1996 (1996-11-04), стр. 310-317, XP010212395, DOI: 10.1109 / IROS. 1996.570693, ISBN: 978-0-7803-3213-3 (Чжидун Ван и др., Осуществление совместной манипуляции объектами с использованием нескольких роботов с поведенческой моделью).
Это решение требует нескольких взаимодействующих внешних роботов для перемещения устройства или объекта из одного положения в другое. Внешние роботы должны сначала приблизиться к перемещаемому устройству, затем осуществить хороший захват путем взаимодействия с объектом, и затем перемещать его, координируя свои движения.
Известные решения сложны и не подходят для эффективного перемещения и перестановки нескольких объектов в помещении одновременно. Они также требуют пространства в дополнение к пространству, занимаемому перемещаемыми объектами.
Раскрытие сущности изобретения
Целью настоящего изобретения является обеспечение роликовой конструкции, выполненной с возможностью встраивания в устройства, такие как предмет мебели, подвижная стенка и т.д., для автономного перемещения устройства по поверхности из первого положения во второе положение.
Также целью является обеспечение способа для автономного перемещения по меньшей мере одного устройства из первого положения во второе положение по поверхности. Это возможно благодаря встраиванию роликовой конструкции согласно изобретению в перемещаемое устройство. В одном варианте осуществления изобретения раскрыт способ автономного перемещения группы устройств из первого во второе положение.
Настоящее изобретение определяется роликовой конструкцией, подлежащей встраиванию в устройство для автономного перемещения устройства из первого положения во второе положение по поверхности. Роликовая конструкция содержит роликовый элемент, расположенный в первой концевой части корпуса роликовой конструкции так, чтобы указанный роликовый элемент находился в контакте с поверхностью, когда роликовая конструкция подлежит перемещению. Роликовая конструкция дополнительно содержит следующие устройства, расположенные в корпусе роликовой конструкции:
- беспроводной приемник и управляющее устройство, соединенные друг с другом;
- средство позиционирования, соединенное с управляющим устройством, для определения положения роликовой конструкции относительно окружающих ее объектов, и
- приводное средство, соединенное с управляющим устройством и роликовым элементом, для приведения в движение и управления перемещениями роликового элемента в соответствии с первым положением, определенным средством позиционирования, и принимаемым беспроводным сигналом, содержащим команды перемещения и второе положение, и
- источник питания, соединенный с устройствами, расположенными в корпусе.
Другие признаки роликовой конструкции раскрыты в формуле изобретения.
Изобретение дополнительно определяется способом автономного перемещения по меньшей мере одного устройства из первого положения во второе положение по поверхности, причем способ содержит следующие шаги:
- обеспечивают роликовую конструкцию, содержащую роликовый элемент, расположенный в первой концевой части корпуса роликовой конструкции так, чтобы указанный роликовый элемент находился в контакте с поверхностью, когда роликовая конструкция подлежит перемещению;
- встраивают роликовую конструкцию в устройство, подлежащий перемещению, и приводят ее в контакт с поверхностью, когда указанное устройство подлежит перемещению, при этом роликовая конструкция дополнительно содержит следующие устройства, расположенные в корпусе роликовой конструкции:
- беспроводной приемник и управляющее устройство, соединенные друг с другом, средство позиционирования, соединенное с управляющим устройством, для определения положения роликовой конструкции относительно окружающих ее объектов, и приводное средство, соединенное с управляющим устройством и роликовым элементом, для приведения в движение и управления перемещениями роликового элемента;
- принимают команды перемещения в управляющем устройстве роликовой конструкции посредством беспроводного приемника;
- обеспечивают определение средством позиционирования в роликовой конструкции первого текущего положения относительно окружающих ее объектов;
- исполняют принятую команду перемещения в управляющем устройстве для управления перемещением роликового элемента, при этом перемещения основаны на указанном определенном первом положении роликовой конструкции и принятых командах перемещения, содержащих маршрут и второе положение, и
- перемещают по меньшей мере одну роликовую конструкцию, встроенную в устройство, из первого во второе положение в соответствии с маршрутом.
Дополнительные признаки способа раскрыты в формуле изобретения.
Существуют различные типы роликовых конструкций для перемещения устройств, таких как предметы мебели и стеночные элементы. Однако эти конструкции не могут обеспечить автономную самоприводную перестановку и перемещение устройств.
Целью настоящего изобретения является обеспечение роликовой конструкции, выполненной с возможностью встраивания в устройства, такие как предмет мебели, подвижная стенка и т.д., и с возможностью автономного перемещения устройства по поверхности из первого положения во второе положение.
Краткое описание чертежей
Ниже изобретение дополнительно раскрыто со ссылкой на чертеж, показывающий различные устройства, входящие в состав роликовой конструкции в соответствии с изобретением, а также с помощью неограничивающих примеров вариантов осуществления настоящего изобретения.
Осуществление изобретения
Роликовая конструкция 10 соединена с устройством для автономного перемещения устройства из первого положения во второе положение по поверхности.
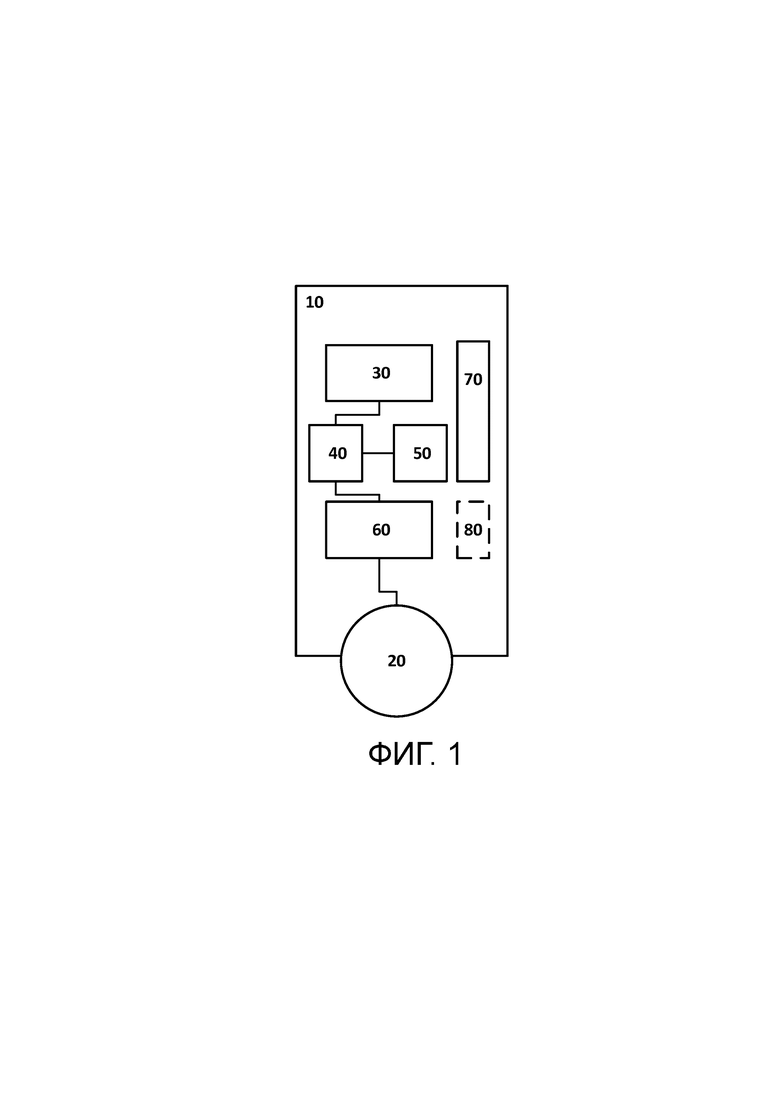
На фиг. 1 показаны различные устройства, входящие в состав роликовой конструкции согласно изобретению. Роликовая конструкция 10 содержит корпус, роликовый элемент 20, расположенный в первой концевой части корпуса и приводимый в контакт с поверхностью, когда устройство подлежит перемещению. Корпус является частично полым, чтобы вмещать различные устройства, входящие в состав роликовой конструкции 10.
Роликовая конструкция 10 дополнительно содержит группу различных устройств, расположенных в корпусе.
Одно устройство представляет собой беспроводной приемник 30, а другое устройство представляет собой управляющее устройство 40. Эти устройства соединены друг с другом таким образом, чтобы приемник 30 мог принимать беспроводные управляющие сигналы.
Другое устройство, расположенное в корпусе роликовой конструкции 10, представляет собой средство 50 позиционирования, соединенное с управляющим устройством 40, для определения положения роликовой конструкции 10 относительно окружающих ее объектов. Существуют различные способы определения положения.
Одним из примеров является определение положения с помощью внешнего устройства, отслеживающего положение роликовой конструкции 10. Затем положение может передаваться в средство 50 позиционирования роликовой конструкции 10. Для этого можно использовать различные известные способы. Одним примером является использование камеры, предпочтительно 3D-камеры, наблюдающей за устройством, соединенным с роликовой конструкцией 10. Другой пример - использование метки радиочастотной идентификации (RFID), соединенной с роликовой конструкцией 10 или с подлежащим перемещению устройством. Положение можно также определять с помощью ультразвука. Еще один способ - применение в помещении Bluetooth-позиционирования с помощью триангуляции. Это возможно за счет оснащения роликовой конструкции 10 Bluetooth-передатчиком и размещения по меньшей мере трех антенн в комнате, где находится устройство, соединенное с роликовой конструкцией 10. Все это общеизвестные способы и не будут раскрываться здесь дополнительно.
С управляющим устройством 40 и роликовым элементом 20 также соединено приводные средства 60 для приведения в движение и управления перемещениями роликового элемента 20 в соответствии с первым положением, определенным средством 50 позиционирования, и принятым беспроводным сигналом, содержащим команды перемещения и второе положение.
Возможны различные типы известных приводных средств для перемещения роликового элемента 20. В одном варианте осуществления роликовый элемент приводится в движение одним или более шариками, соединенными с двигателем. В другом варианте осуществления роликовый элемент 20 приводится в движение цепью, соединенной с двигателем. Двигатель предпочтительно представляет собой электрический или электромагнитный двигатель.
Источник 70 питания для приведения в действие различных электронных устройств, расположенных в корпусе, может быть обеспечен различным образом. В одном варианте осуществления питание обеспечивается аккумулятором, подсоединенным к электронным устройствам. В другом варианте осуществления питание обеспечивается средством беспроводной передачи энергии на основе изменяющихся во времени электрических, магнитных или электромагнитных полей. Приемник для получения энергии поля в этом варианте осуществления находится в корпусе роликовой конструкции 10. Полученная энергия поля затем преобразуется в электрический ток, который используется в качестве источника питания для различных электронных устройств, расположенных в корпусе. В другом варианте осуществления изобретения беспроводная передача энергии используется для зарядки аккумулятора, подключенного к электронным устройствам, расположенным в корпусе.
В одном варианте осуществления изобретения роликовая конструкция 10 дополнительно содержит беспроводной передатчик 80. Этот вариант осуществления применим для координации одновременной работы группы из нескольких роликовых конструкций 10. Как это реализовано, поясняется ниже при раскрытии заявленного способа автономного перемещения по меньшей мере одного устройства с помощью роликовой конструкции 10.
В одном варианте осуществления роликовая конструкция 10 дополнительно содержит поршень, установленный с возможностью возвратно-поступательного перемещения в корпусе так, чтобы поршень мог перемещаться между верхним и нижним положениями в цилиндре. В этом варианте осуществления роликовый элемент 20 соединен с поршнем. Детали этой компоновки раскрыты в норвежском патенте заявителя NO 316760 В1. Эта публикация также раскрывает возможные механические признаки роликовой конструкции в соответствии с настоящим изобретением.
В одном варианте осуществления роликовая конструкция 10 встроена в предмет мебели, например стул или стол. В другом варианте оно встроено в секцию подвижного стеночного элемента.
Когда роликовая конструкция 10 встроена в подлежащее перемещению устройство, они вместе образуют систему, содержащую роликовые устройства, прикрепленные к подлежащему перемещению устройству, при этом по меньшей мере одно является роликовой конструкцией 10 в соответствии с изобретением, как раскрыто выше.
Если перемещаемым устройством является стул, то каждая ножка стула оснащена роликовыми устройствами, при этом три из них могут быть пассивными устройствами, содержащими только роликовые элементы, а одно представляет собой активную роликовую конструкцию 10 в соответствии с изобретением. Возможны другие конфигурации роликовых устройств, например, два пассивных роликовых устройства и две активные роликовые конструкции 10. Эта конфигурация обеспечивает лучшее управление перемещениями стула.
Как было указано, роликовая конструкция 10 содержит беспроводной приемник 30 для приема команд перемещения для управляющего устройства 40 роликовой конструкции 10. Команды могут, например, передаваться с помощью пульта дистанционного управления, планшета или смартфона с установленным приложением для управления различными сценариями.
Изобретение дополнительно определяется способом автономного перемещения по меньшей мере одного устройства, например предметов мебели и стеночных элементов, из первого положения во второе положение по поверхности, причем способ содержит несколько шагов.
Первыми шагами являются обеспечение и встраивание в подлежащее перемещению устройство роликовых устройств, из которых по меньшей мере одно представляет собой роликовую конструкцию 10 в соответствии с раскрытыми выше.
Следующим шагом является получение команд перемещения в управляющем устройстве 40 роликовой конструкции 10 с помощью беспроводного приемника 30. Управляющее устройство 40, соединенное с приемником 30, может содержать микроконтроллер, интерпретирующий и действующий на передаваемую последовательность, содержащую команды приведения в действие.
Когда управляющее устройство 40 роликовой конструкции 10 получает команды перемещения, оно запрашивает ее положение относительно окружающих объектов у устройства 50 позиционирования. Это является текущим и первым положением.
Когда текущее положение установлено, в управляющем устройстве 40 исполняется команда перемещения для управления перемещением роликового элемента 20. Перемещения основаны на указанном полученном первом положении роликовой конструкции 10 и принятых командах перемещения, содержащих маршрут и второе положение.
Исходя из этого, последний шаг способа заключается в перемещении по меньшей мере одной роликовой конструкции 10, прикрепленной к устройству, из первого во второе положение в соответствии с маршрутом.
В одном варианте осуществления заявленного способа по меньшей мере две роликовые конструкции 10 соединены с устройством, подлежащим перемещению по поверхности из первого во второе положение. Команды перемещения, например от электронного планшета, будут затем переданы на все роликовые конструкции 10.
В одном варианте осуществления выбранная роликовая конструкция 10 задана в качестве главной конструкции, управляющей перемещениями других роликовых конструкций 10, соединенных с подлежащим перемещению устройством. Затем они будут действовать как подчиненные устройства и реагировать на команды от главного устройства. Главное устройство затем задает конкретный маршрут в соответствии с принятыми беспроводными сигналами и передает управляющие сигналы подчиненному устройству, отдавая ему команду следовать перемещениям в соответствии с конкретным маршрутом.
Если в задание включено несколько роликовых конструкций 10 согласно изобретению, которыми нужно управлять одновременно, то каждой роликовой конструкции присваивается уникальный идентификатор. Таким образом, все роликовые конструкции 10 могут принимать индивидуальные команды перемещения.
Если одна роликовая конструкция 10 действует как главная для других, то она будет управлять каждой из других роликовых конструкций 10, соединенных с одним устройством.
Другой вариант осуществления изобретения содержит способ управления перемещениями группы из нескольких устройств в соответствии с заданными сценариями. Такие устройства могут, например, представлять собой стулья, столы и подвижные стенки.
При настройке этой конфигурации одна роликовая конструкция 10, прикрепленная к одному из устройств в группе, задается в качестве главной для других. Таким образом, она будет координировать движения других устройств, входящих в группу. Таким образом, могут быть созданы различные сценарии с различными перемещениями и планами устройств.
Согласно одному варианту осуществления изобретения выполняются следующие шаги для создания и записи сценария, определяющего перемещения и маршруты для устройств, входящих в группу устройств, подлежащих перемещению.
Первым шагом является запись информации о первом положении всех роликовых конструкций 10, входящих в группу. Эта информация о положении может быть визуализирована на экране, отображающем помещение, в котором находятся перемещаемые устройства.
Следующим шагом является запись информации о втором положении всех роликовых конструкций 10, входящих в группу. Это можно сделать, перемещая устройства, визуализированные на экране. На сенсорном экране различные устройства можно перетащить на новое место. После этого шага определяются первое и второе положения всех устройств, входящих в группу.
Шаг способа состоит в выборе одной из роликовых конструкций 10, которое будет действовать в качестве главной конструкции для других роликовых конструкций 10, входящих в группу. Очередность выполнения этого шага относительно других шагов не является существенной.
Последним шагом является задание траектории перемещения и порядка перемещения роликовых конструкций 10. Это возможно при использовании уникального идентификатора каждой роликовой конструкции 10.
Вся процедура настройки может быть визуализирована и задана, например, на планшете, который также может служить пультом дистанционного управления путем передачи беспроводных сигналов, например с помощью Bluetooth.
Программное приложение, установленное на планшете, может показать помещение и местоположение стенок и мебели, подлежащих перемещению в помещении из первого положения во второе в соответствии с конкретным сценарием. Затем пользователь может перетаскивать различные устройства, отображаемые на экране, например, жестами перетаскивания мебели и стенок из первого положения во второе положение. Затем программа может, основываясь на начальном и конечном положениях для каждого устройства, создавать конкретные маршруты для устройств, по которым они должны следовать при автономном перемещении. Исходя из этого, в устройстве могут быть созданы и сохранены различные сценарии или сцены.
Также возможны другие типы управления различными установочными сценариями, например, голосом или жестами, а также тактильным вводом на других устройствах, кроме тех, которые имеют сенсорный экран.
Ниже приведены некоторые примеры того, как изобретение может быть реализовано и использовано.
Согласно одному сценарию, решение согласно изобретению может использоваться для автоматического изменения положения парт и стульев в классной комнате. Могут быть заданы разные конфигурации столов и стульев, например одиночная или групповая установка в соответствии с конкретными сценариями.
Это также может быть полезно при уборке пола в классе. Когда нужно выполнить уборку, может быть выполнен сценарий уборки с перемещением всех парт и стульев из типовой обстановки классной комнаты в новую компоновку, где парты и стулья будут расположены вдоль стенок, оставляя пространство пола свободным. Этот сценарий может быть связан с роботом-уборщиком, запрограммированным для взаимодействия с автономно перемещающимися столами и стульями.
Другой возможный сценарий, в котором может использоваться решение согласно настоящему изобретению, реализуется в конференц-зале, где можно легко задать различные установочные сценарии в соответствии с типом конференции. Подвижные стенки могут определять количество помещений, например, одно большое помещение или четыре помещения меньшего размера. Существуют бесчисленные конфигурации и возможности.
Еще один пример того, как можно использовать роликовые конструкции в соответствии с изобретением, состоит во встраивании одной или более роликовых конструкций в поддон. Это обеспечит подвижный и управляемый поддон. Поддоны обычно используются для временного хранения различных видов товаров. При работе с поддонами их перемещают из одного положения в другое. Это обычно делается с помощью тележки. Встроив роликовую конструкцию в соответствии с настоящим изобретением в поддон, можно управлять перемещением по поверхности из одного положения в другое без необходимости использования внешних устройств для грузообработки и перемещения поддона. Несколькими поддонами с роликовыми конструкциями можно управлять в соответствии с различными сценариями, как указывалось выше.
Другим примером является встраивание одной или более роликовых конструкций в опорную конструкцию или каркас для транспортировки по поверхности продуктов различного типа из одного места в другое.
Роликовая конструкция может использоваться как в помещениях, так и вне их. Оно может использоваться как на суше, так и на море, например на морских установках, таких как буровые установки и палубы судов.
Роликовая конструкция в соответствии с изобретением может быть встроена в устройство при его изготовлении или может быть установлена в устройстве, изначально не предназначенном для перемещения. Изобретение можно использовано как внутри, так и снаружи зданий.
Как понятно из различных примеров использования роликовой конструкции, специалист в данной области техники увидит другие возможные области применения настоящего изобретения, которые стали возможными благодаря роликовой конструкции 10, позволяющей автономно перемещать устройство по поверхности из первого положения во второе положение.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОЛИКОВОЕ УСТРОЙСТВО, ПРЕДМЕТ МЕБЕЛИ, СОДЕРЖАЩИЙ РОЛИКОВОЕ УСТРОЙСТВО, И ПРИМЕНЕНИЕ РОЛИКОВОГО УСТРОЙСТВА | 2015 |
|
RU2666097C2 |
| МЕБЕЛЬ ДЛЯ МЕРОПРИЯТИЙ | 2020 |
|
RU2785145C1 |
| СПОСОБ И СИСТЕМА НАВИГАЦИИ ПАССАЖИРСКОГО ДРОНА В ГОРНОЙ МЕСТНОСТИ | 2018 |
|
RU2681278C1 |
| МОДУЛЬ УПРАВЛЕНИЯ ПОЛИГОННЫМ ОБОРУДОВАНИЕМ | 2017 |
|
RU2670395C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРОГРАММИРУЕМОГО УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ДВИЖЕНИЯ ПОЛЬЗОВАТЕЛЯ К ЛИФТУ/ЭСКАЛАТОРУ | 2015 |
|
RU2642150C2 |
| РОБОТИЗИРОВАННЫЙ МОБИЛЬНЫЙ КУРЬЕРСКИЙ КОМПЛЕКС | 2022 |
|
RU2787547C1 |
| ФОРМИРОВАНИЕ И ИСПОЛЬЗОВАНИЕ КАРТ ВЫСОКОГО РАЗРЕШЕНИЯ | 2017 |
|
RU2721677C1 |
| ИНФОРМАЦИЯ О ПОГОДНЫХ УСЛОВИЯХ НА ОСНОВЕ МАГНИТОМЕТРОВ | 2014 |
|
RU2582500C2 |
| СЕТЕВАЯ АРХИТЕКТУРА, СПОСОБЫ И УСТРОЙСТВА ДЛЯ СЕТИ БЕСПРОВОДНОЙ СВЯЗИ | 2017 |
|
RU2693848C1 |
| АВТОНОМНАЯ КОРРЕКЦИЯ ВРЕМЕННОЙ ДИАГРАММЫ ДЛЯ БЕСПРОВОДНОГО УСТРОЙСТВА | 2017 |
|
RU2717553C1 |
Группа изобретений относится к роликовой конструкции и способу автономного перемещения устройств со встроенной роликовой конструкцией. Роликовая конструкция содержит роликовый элемент в первой концевой части ее корпуса, беспроводной приемник, управляющее устройство, средство позиционирования, приводное средство, источник питания. Для перемещения устройства встраивают роликовую конструкцию в подлежащее перемещению устройство, приводят ее в контакт с поверхностью, принимают команды перемещения в управляющее устройство посредством беспроводного приемника для перемещения по заданному маршруту, исполняют команды перемещения в соответствии с заданным маршрутом. Обеспечивается автономное перемещение устройства по поверхности. 2 н. и 12 з.п. ф-лы, 1 ил.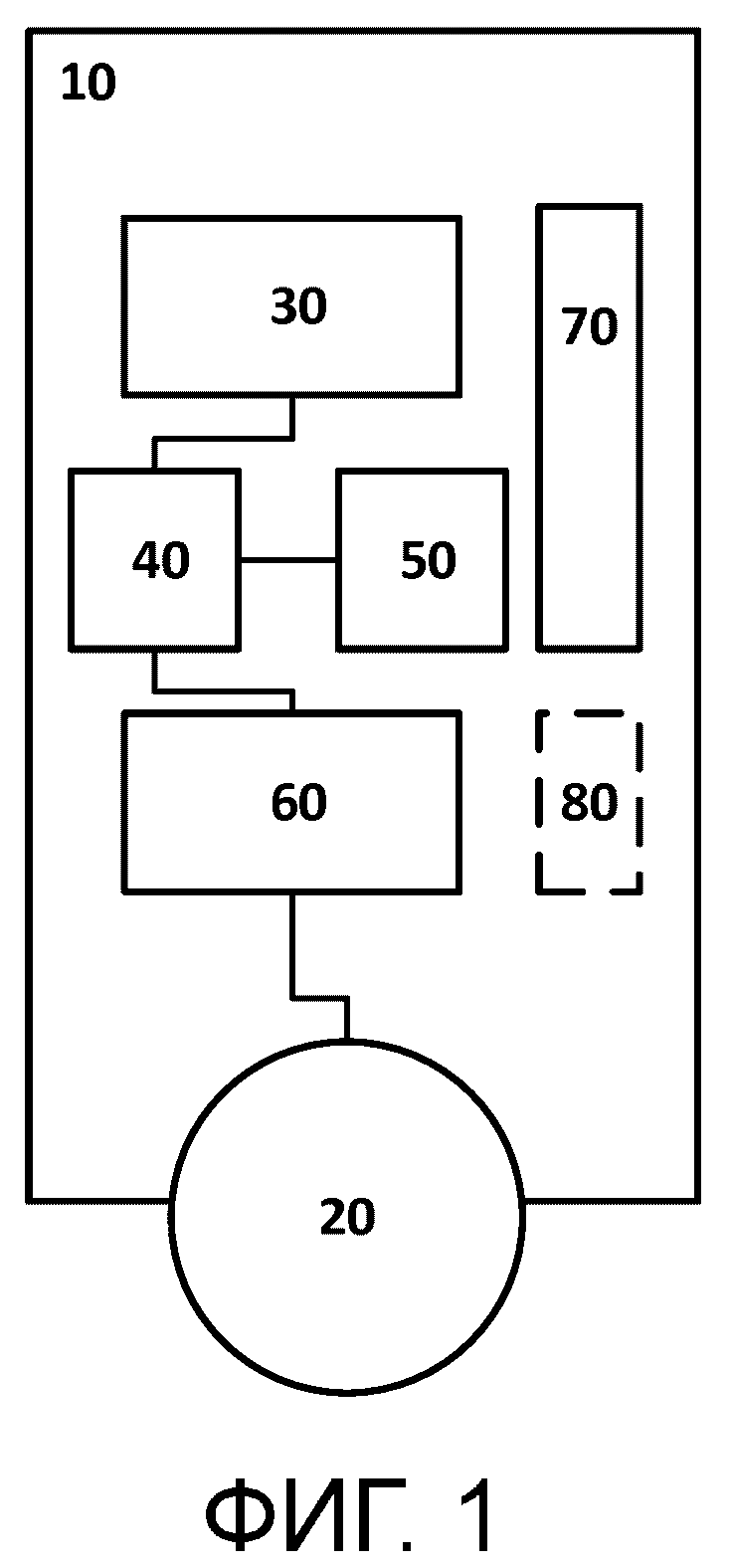
1. Роликовая конструкция (10), выполненная с возможностью управления, будучи встроенной в устройство для совместного создания системы для автономного перемещения указанного устройства по поверхности из первого положения во второе положение, при этом указанная роликовая конструкция (10) содержит роликовый элемент (20), расположенный в первой концевой части корпуса роликовой конструкции (10) так, чтобы указанный роликовый элемент (20) находился в контакте с поверхностью, когда роликовая конструкция (10) подлежит перемещению,
отличающаяся тем, что она дополнительно содержит следующие устройства, расположенные в корпусе роликовой конструкции (10):
- беспроводной приемник (30) и управляющее устройство (40), соединенные друг с другом;
- средство (50) позиционирования, соединенное с управляющим устройством, для определения положения роликовой конструкции (10) относительно окружающих ее объектов; и
- приводное средство (60), соединенное с управляющим устройством (40) и роликовым элементом (20), для приведения в движение и управления перемещениями роликового элемента (20) в соответствии с первым положением, определенным средством (50) позиционирования, и принятым беспроводным сигналом, содержащим команды перемещения и второе положение; и
- источник (70) питания, соединенный с элементами, расположенными в корпусе.
2. Роликовая конструкция (10) по п. 1, дополнительно содержащая беспроводной передатчик (80), соединенный с управляющим устройством (40).
3. Роликовая конструкция (10) по п. 1 или 2, в которой приводное средство (60), соединенное с роликовым элементом (20), содержит один или более шариков или цепь.
4. Роликовая конструкция (10) по любому из предыдущих пунктов, дополнительно содержащая поршень, установленный с возможностью возвратно-поступательного перемещения в корпусе так, чтобы поршень имел возможность перемещения между верхним и нижним положениями в цилиндре, причем роликовый элемент (20) соединен с указанным поршнем.
5. Роликовая конструкция (10) по любому из предыдущих пунктов, предназначенная для встраивания в предмет мебели.
6. Роликовая конструкция (10) по любому из предыдущих пунктов, предназначенная для встраивания в подвижный стеночный элемент.
7. Роликовая конструкция (10) по любому из предыдущих пунктов, предназначенная для встраивания в поддон.
8. Способ автономного перемещения по меньшей мере одного устройства из первого положения во второе положение по поверхности, содержащий следующие шаги:
- обеспечивают роликовую конструкцию (10), управляемую, будучи встроенной в устройство, подлежащее перемещению, содержащую роликовый элемент (20), расположенный в первой концевой части корпуса роликовой конструкции (10) так, чтобы указанный роликовый элемент (20) находился в контакте с поверхностью, когда роликовая конструкция (10) подлежит перемещению;
- встраивают роликовую конструкцию (10) в устройство, подлежащее перемещению, для совместного создания системы и приводят ее в контакт с поверхностью, когда указанное устройство подлежит перемещению, при этом роликовая конструкция (10) дополнительно содержит следующие устройства, расположенные в корпусе роликовой конструкции (10): беспроводной приемник (30) и управляющее устройство (40), соединенные друг с другом, средство (50) позиционирования, соединенное с управляющим устройством (40), для определения положения роликовой конструкции (10) относительно окружающих ее объектов и приводное средство (60), соединенное с управляющим устройством (40) и роликовым элементом (20), для приведения в движение и управления перемещениями роликового элемента (20);
- принимают команды перемещения в управляющем устройстве (40) роликовой конструкции (10) посредством беспроводного приемника (30);
- обеспечивают определение средством (50) позиционирования в роликовой конструкции (10) первого текущего положения относительно окружающих ее объектов;
- исполняют принятую команду перемещения в управляющем устройстве (40) для управления перемещением роликового элемента (20), при этом перемещения основаны на указанном определенном первом положении роликовой конструкции (10) и принятых командах перемещения, содержащих маршрут и второе положение;
- перемещают по меньшей мере одну роликовую конструкцию (10), встроенную в устройство, из первого во второе положение в соответствии с маршрутом.
9. Способ по п. 8, дополнительно содержащий шаги:
- встраивают по меньшей мере две роликовые конструкции (10) в устройство, подлежащее перемещению, и
- налаживают одну роликовую конструкцию (10) так, чтобы она действовала в качестве главной конструкции, управляющей перемещениями других роликовых конструкций (10), соединенных с устройством.
10. Способ по п. 8, дополнительно содержащий шаги:
- встраивают роликовые конструкции (10) в два или более устройств, входящих в группу устройств, подлежащих перемещению в некоторой области, и
- налаживают одну роликовую конструкцию (10), соединенную с устройством, так, чтобы она действовала в качестве главной конструкции, управляющей перемещениями других роликовых конструкций (10), соединенных с другими устройствами, входящими в указанную группу.
11. Способ по п. 10, в котором перемещениями группы из нескольких устройств управляют согласно заданным сценариям.
12. Способ по п. 11, в котором сценарий задают посредством следующих шагов:
- записывают информацию о первом положении роликовых конструкций (10), входящих в группу;
- записывают информацию о втором положении роликовых конструкций (10), входящих в группу;
- выбирают одну роликовую конструкцию (10) в качестве главной из других роликовых конструкций (10), входящих в группу; и
- задают траекторию перемещения и порядок перемещения роликовых конструкций (10).
13. Способ по любому из пп. 8-12, в котором перемещениями роликовых конструкций (10) управляют с использованием устройства дистанционного управления.
14. Способ по п. 13, в котором устройством дистанционного управления управляют голосом, жестами или тактильным вводом.
| RU 2015130926 A, 25.01.2017 | |||
| ИНФОРМАЦИОННАЯ СИСТЕМА ДЛЯ ПРОМЫШЛЕННЫХ МАШИН | 2010 |
|
RU2517334C2 |
| DE 202010016831 U1, 14.04.2011 | |||
| DE 19801509 A1, 30.07.1998 | |||
| ИНГИБИТОР ПОДВУЛКАНИЗАЦИИ ПОЛИУРЕТАНА | 2015 |
|
RU2686833C2 |

