Изобретение относится к авиационной и космической отрасли, в частности к средствам, предназначенным для проведения наземных испытаний работоспособности механизмов, трансформируемых элементов конструкций космических аппаратов (КА), например, складных панелей солнечных батарей, раскрываемых антенн и т.п., предназначенных для эксплуатации в условиях невесомости, имитация которой достигается посредством компенсации веса с применением системы обезвешивания на основе летательных аппаратов легче воздуха.
Из уровня техники известны различные способы управления подъёмной силой летательных аппаратов легче воздуха. В основном они сводятся к регулированию (изменению) давления и объёма части несущего газа, что обуславливает невозможность их использования для имитации невесомости конструкций КА.
Так, например, известен способ управления (заявка RU №2001104560А) подъёмной силой дирижабля откачиванием или закачиванием воздуха. Для управления подъёмной силой перекачивают одну и ту же массу несущего газа из основного газохранилища, сжимая его во внутреннем, меньшего объёма, газохранилище для уменьшения подъёмной силы, или производят рекомпрессию несущего газа обратно из внутреннего газовместилища в основное газовместилище для увеличения подъёмной силы дирижабля.
Также известен способ, применяемый для несущей системы летательного аппарата легче воздуха, содержащего несущую оболочку изменяемого объема, заполненную газом легче воздуха, и имеющий внешнюю оболочку изменяемого объема (патент RU № 2007329 C1), заключающийся в управления подъемной силой, при котором производят изменение объема несущий оболочки, заполненной газом легче воздуха, и, в зависимости от изменения объема внутренней несущей оболочки, производят изменение объема внешней оболочки и давления заполняющего ее воздуха или газа, плотность которого незначительно, до 5%, отличается от плотности воздуха.
Также известен способ поддержания объекта в свободном состоянии в пространстве без необходимости соединения точки крепления с землей (патент RU №2421374), содержащий крепление объекта к опорной конструкции, которая имеет пустотелую оболочку, наполненную газом, имеющим меньший удельный вес, чем воздух, и регулировку давления упомянутого газа в оболочке, которая включает в себя установку манометра, который калибруется как функция массы прикрепленного объекта.
Недостатком вышеописанных способов является необходимость размещения оборудования для перекачивания несущего газа внутри дирижабля (аэростата), и сложная конструкция оболочки, часть которой, к тому же, должна выдерживать избыточное давление сжатого газа, что в общем обуславливает невозможность использования известных решений для имитации невесомости конструкций КА.
Известен способ поддержания объекта в свободном состоянии в пространстве без необходимости соединения точки крепления с землей (патент RU № 2421374 С2), причем упомянутый способ содержит прикрепление объекта к опорной конструкции, которая имеет пустотелую оболочку, наполненную газом, имеющим меньший удельный вес, чем воздух, регулировку давления упомянутого газа в оболочке, отличающийся тем, что регулировка давления упомянутого газа в оболочке включает в себя установку манометра, который калибруется как функция массы прикрепленного объекта. Исходя из известной массы прикрепленного объекта, чтобы подавать газ под соответствующим давлением с целью получения упомянутой выталкивающей силы, регулировка давления упомянутого газа в оболочке включает в себя: измерение температуры воздуха окружающей среды и регулировку давления газа, реагирующего на измеренную температуру воздуха окружающей среды, для того, чтобы регулировать массу газа в оболочке, газ предварительно хранится в опорной конструкции.
Недостатком этого способа является то, что необходимую подъёмную силу определяют опосредствовано по давлению газа в оболочке, функциональность метода основана на том, что масса прикрепленного объекта известна и не изменяется в большом диапазоне, компенсируется только изменение температуры окружающего воздуха (изменение плотности воздуха окружающей среды).
За прототип способа имитации невесомости трансформируемых систем КА выбран «Шар из специального материала необходимого объема для требуемой подъемной силы наполняется гелием, который специально тарируется, подводится к элементам раскрывающихся конструкций и снимает вес в процессе открытия», источник: «Наука в Сибири», стр. 7, http://www.nsc.ru/HBC/images/2015/n11/nvs_spec_color.pdf). Дополнительно по данной теме раскрыта информация (источник: https://www.youtube.com/watch?v=F8AuxAAuH2s).
Недостатком прототипа является низкая функциональность и технологичность, связанная с неудобством проведения технологических операций: шар тарируется на одно усилие, после чего уже надутым (диаметром до 7 м) закрепляется на объекте обезвешивания.
Из уровня техники известны различные устройства для имитации невесомости, компенсации весовой составляющей (например, RU № 2334970 С2; RU № 2402470 С2; RU № 2565807 C2). Известные системы имитации невесомости предназначены для тех же целей, что и предлагаемое изобретение, но представляют собой подъёмные механизмы различной конфигурации, оснащенные электроприводами и системами датчиков (угла отклонения стропа, весовыми датчиками, системами определения длины стропа). Серьезным ограничением для использования вышеперечисленных систем на основе подъёмных механизмов является необходимость создания стационарного технологического участка с монтажом несущих металлоконструкций определенной компоновки и грузоподъёмности, точное позиционирование космического аппарата или отдельных элементов его конструкции под соответствующими элементами системы имитации невесомости. Это создает дополнительные трудности при работе, как с крупногабаритными КА, так и в случаях, когда необходимо выполнять монтажные или иные технологические операции, связанные с необходимостью локального обезвешивания отдельных элементов трансформируемых конструкций КА (штанг, антенн и т.п.), для которых не требуется большого количества точек приложения усилия, но необходимо выполнять операции раскрытия с заданием необходимых, значений усилия имитации невесомости.
Из уровня техники известны грузоподъёмные устройства, использующие летательные аппараты легче воздуха - привязные аэростаты различных типов, в том числе те, в конструкцию которых входят системы подачи несущего газа, расположенные на земле, и шланг подачи несущего газа в аэростат, для поддержания подъёмной силы, например, RU № 2372248 C1; RU № 19812 U1.
Недостатком подобных устройств является то, что они предназначены только для подъема груза закрепленным аэростатом с заведомо большей подъёмной силой, чем вес нагрузки, и подкачка оболочки газом по мере его убывания осуществляется при видимом падении подъёмной силы аэростата, а эвакуация рабочего тела, при необходимости уменьшить подъемную силу, осуществляется сбросом газа в атмосферу через клапан в оболочке аэростата.
В качестве прототипа устройства выбран дирижабль (RU№2034744С1), содержащий газовую оболочку, выполненную из продольных надувных балок, внутренний объем газовой оболочки разделен на отсеки продольными и поперечными перегородками, надувные балки сгруппированы по отсекам и погруппно соединены газопроводами через систему наполнения-опорожнения с соответствующими отсеками газовой оболочки, и систему наполнения-опорожнения надувных балок, которая содержит компрессор с приводом и пневмоклапан с пневморегулятором, установленные на линии наполнения надувных балок, электроклапан, установленный на линии опорожнения надувных балок, а также командоаппарат, электрически связанный с пневморегулятором, задатчиком режимов и выключателями привода компрессора и электроклапана.
К недостаткам подобного устройства можно отнести то, что регулирование осуществляется только имеющимся на борту дирижабля количеством рабочего тела посредством изменения плотности газа в части объёма (в надувных балках), что сильно ограничивает диапазон регулирования подъёмной силы. Возникает необходимость предварительной статической балансировки дирижабля после загрузки под конкретную текущую нагрузку.
При использовании привязных аэростатов для проведения испытаний конструкций КА, на практике, увеличение подъёмной силы достигается добавлением вручную некоторого количества рабочего тела или присоединением еще одного шара, а уменьшение - стравливанием рабочего тела через клапан в оболочке. Подобные решения имеют много недостатков - увеличение усилия трудно контролировать, либо оно происходит скачкообразно, а стравливание, например, дорогостоящего гелия значительно увеличивает себестоимость процесса.
Регулирование с использованием балласта, т.е. соответственно и аэростата с заведомо большей подъемной силой - приводит к значительному увеличению размеров аэростата. Это нежелательно, учитывая и без того немалые размеры аэростатов, да и дополнительную систему изменения веса балласта зачастую просто негде разместить, учитывая специфику задачи обезвешивания трансформируемых (т.е. перемещающихся в процессе раскрытия), крупногабаритных конструкций КА, например, раскрываемых панелей солнечных батарей или раскрываемых на откидывающихся штангах антенн. Но главное - балласт сильно влияет на динамические, инерционные характеристики системы в целом и может привести к нештатному нагружению объекта раскрытия боковым усилием, что совершенно недопустимо при физической отработке функционирования механизмов и устройств, трансформируемых конструкций КА.
При внешней простоте практическое применение привязных аэростатов с регулированием - добавлением и стравливанием некоторого количества рабочего тела наталкивается также на следующие технические проблемы:
- любой сжатый газ при расширении охлаждается (эффект Джоуля-Томсона), и при заправке аэростата из баллона высокого давления мы получаем в нем температуру рабочего тела ниже, чем температура окружающей среды в помещении. В дальнейшем происходит постепенный нагрев рабочего тела в аэростате до температуры окружающей среды, (т.е. имеется постоянное изменение подъёмной силы аэростата), что оказывает значительное влияние на точность поддержания усилия обезвешивания;
- значительные габариты используемых аэростатов (диаметром, например, от 2 до 8 м) накладывают технологические ограничения на транспортировку и хранение аэростатов, при перемещении по одному цеху в целях безопасности при ручных манипуляциях приходится приспускать шар (стравливать дорогостоящее рабочее тело) для уменьшения подъёмной силы и габаритных размеров аэростата;
- высокие требования к материалу и качеству изготовления аэростата для обеспечения максимальной герметичности;
- ограниченное время использования и плохая точность поддержания усилия из-за постоянной утечки рабочего тела (газы легче воздуха обладают высокой проникающей способностью).
Таким образом, общими недостатками прототипов для способа и устройства являются низкая их функциональность и технологичность, отсутствие возможности программируемого задания и автоматического регулирования подъёмной силы аэростата, изменение и поддержания необходимого усилия для имитации невесомости трансформируемых элементов КА на каждом этапе операций раскрытия-закрытия, при изменяющейся нагрузке.
Для заявленного способа выявлены следующие основные общие с прототипом существенные признаки: способ имитации невесомости трансформируемых систем космических аппаратов, включающий наполнение газом, имеющим меньший удельный вес, чем воздух привязного аэростата, прикрепление его к трансформируемой системе; имитацию невесомости в процессе раскрытия трансформируемой системы.
Для заявленного устройства выявлены следующие основные общие с прототипом существенные признаки: устройство для реализации способа имитации невесомости трансформируемых систем космических аппаратов на основе привязного аэростата, заполненного рабочим газом легче воздуха, соединенного через газопровод к системе наполнения-опорожнения, включающую компрессор, а также управляющее устройство.
Основной технической проблемой, на решение которой направлено заявленное изобретение является повышение функциональности и технологичности, возможность программируемого задания необходимого усилия компенсации весовой составляющей; автоматизации регулирования необходимой подъёмной силы аэростата за счет автоматического наполнения-опорожнения аэростатов на каждом этапе операции имитации невесомости трансформируемых элементов КА.
Указанные проблемы решаются за счет способа имитации невесомости трансформируемых систем космических аппаратов, включающего наполнение газом, имеющим меньший удельный вес, чем воздух, например, гелием, привязного аэростата, и прикрепление его к трансформируемой системе; имитацию невесомости в процессе раскрытия трансформируемой системы. Заявляемый способ отличается от прототипа тем, что на каждом этапе имитации невесомости трансформируемой системы датчиками температуры измеряют температуру воздуха окружающей среды и температуру газа внутри аэростата. Управляющим устройством, установленным на земле и связанным с датчиками температуры, и с учетом измеренных температур, рассчитывают количество газа, которое необходимо добавить или откачать из аэростата. При этом газ откачивают из аэростата через двухступенчатую систему эвакуации газа для дальнейшего хранения в ресивере высокого давления, а добавляют газ либо из ранее откачанного из ресивера высокого давления, либо добавляют от баллонной рампы высокого давления. Источник добавления газа определяется управляющим устройством по исходным параметрам, по показания весового датчика закрепленного между аэростатом и трансформируемой системой, датчика давления в ресивере высокого давления, датчика давления в баллонной рампе высокого давления, при этом, чтобы учесть инерционность системы, на электропневматическом пропорциональном регуляторе, установленном в линии подачи газа устанавливают рассчитанное управляющим устройством давление подаваемого в аэростат газа, необходимое для требуемой по динамике процесса скорости изменения подъемной силы, а расходомером, установленным после пропорционального регулятора в линии подачи газа, контролируют количество газа подаваемого или откачиваемого из аэростата. Снимают весовые характеристики трансформируемой системы, например, по показаниям весового датчика. Также технические проблемы решаются устройством для реализации указанного способа на основе привязного аэростата, заполненного рабочим газом легче воздуха, соединенного через газопровод к системе наполнения-опорожнения, включающую компрессор, а также управляющее устройство. Заявленное устройство отличается от прототипа тем, что включает в себя весовой датчик с электрическим аналоговым выходом, закрепленный между аэростатом и обезвешиваемой трансформируемой системой; гибкий шланг линии подачи и откачки газа из аэростата; управляющее устройства на основе модульного программируемого микроконтроллера, установленное на земле и включающее в себя рампу с баллонами высокого давления с рабочим газом легче воздуха, при этом рампа оснащена газовым редуктором понижающим давление, датчиком давления с электрическим аналоговым выходом, а также установленным в линии подачи и откачки газа электропневматическим пропорциональным регулятором давления. Также устройство содержит систему управляемых электропневмоклапанов открытия-закрытия магистралей и, установленного после попорционального регулятора давления расходомера с электрическим аналоговым выходом - для измерения объёмного количества закачиваемого или откачиваемого газа; датчики температуры с электрическим аналоговым выходом для измерения температуры окружающего воздуха и температуры газа внутри аэростата связанных с управляющим устройством; двухступенчатую систему эвакуации газа, связанную с линией подачи и откачки и включающую в себя вакуумный насос, компрессор и два ресивера низкого и высокого давления для хранения газа, откачанного из аэростата.
Для расчета используются следующие нижеприведенные формулы.
Принцип действия аэростата основан на законе Архимеда. На любой предмет, находящийся в атмосфере, действует подъёмная (или Архимедова) сила Fa, равная весу воздуха, вытесненного этим предметом:
Fa = (Mв - Мр)g, (1)
где:
Mв - масса воздуха окружающей среды, вытесненная оболочкой аэростата;
Мр - масса рабочего тела (используемого газа легче воздуха), находящегося в оболочке;
g - ускорение силы тяжести (9,8м/с2).
Массы Mв и Мр можно выразить через плотности и объемы сред:
Mв = PвV, (2)
Mр = PрV, (3)
где:
V - объём оболочки;
Pв - плотность воздуха окружающей среды;
Pр - плотность рабочего тела внутри оболочки.
Для учета изменения температуры наружного воздуха и температуры рабочего тела (внутри оболочки аэростата) из уравнения Менделеева-Клапейрона можно получить связь между плотностью, давлением и температурой:
Pв = р\RTн, (4)
Pр = р\RTв, (5)
где р - давление окружающей среды; Тн и Тв - соответственно температура наружного, или окружающею, воздуха и температура внутри оболочки в градусах Кельвина; R - газовая постоянная воздуха, для сухого воздуха R = 287 Дж/кг⋅град.
Окончательно полную подъемную силу аэростата (1) с учетом (2)...(5) рассчитывается в по следующей формуле:
Для гелия: F He = (Pв - P He) gV.
Техническим результатом заявляемого изобретения является создание автоматизированной системы имитации невесомости с высокоточным регулированием (увеличением и уменьшением) и длительным автоматическим поддержанием требуемых значений подъёмной силы с использованием стационарных летательных аппаратов - привязных аэростатов, наполненных рабочим телом - газом легче воздуха и при этом не использующих для снижения (при регулировании) подъёмной силы выброс рабочего тела аэростата в атмосферу.
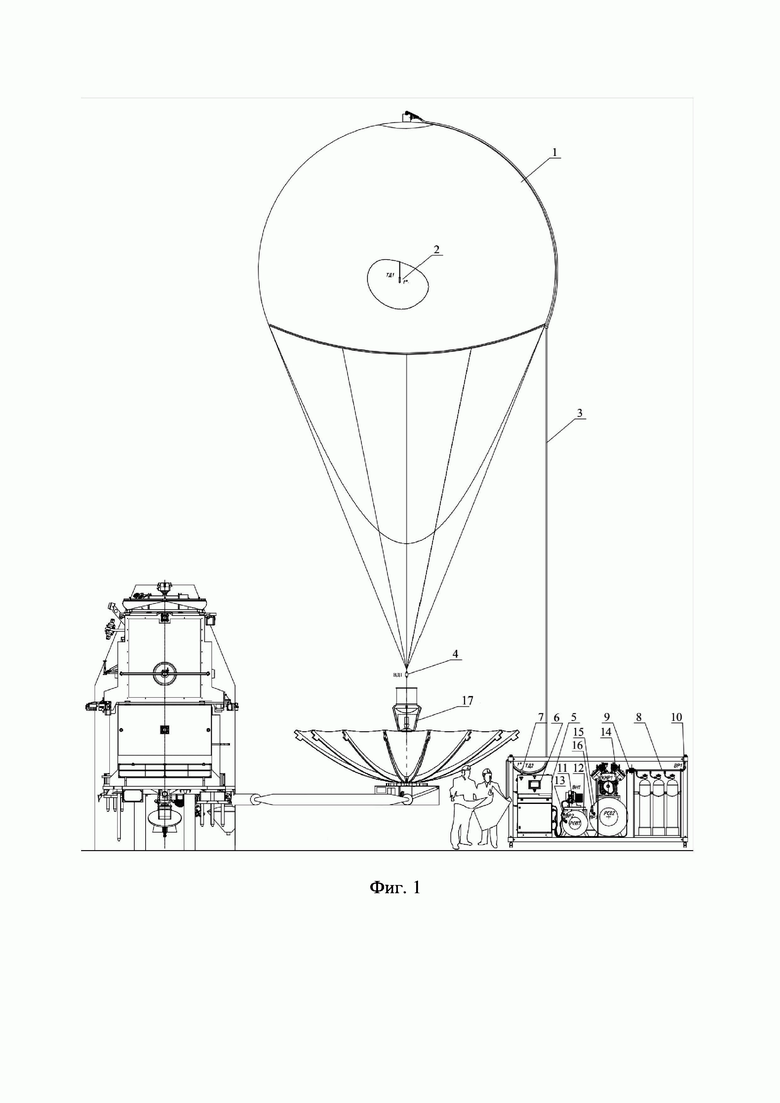
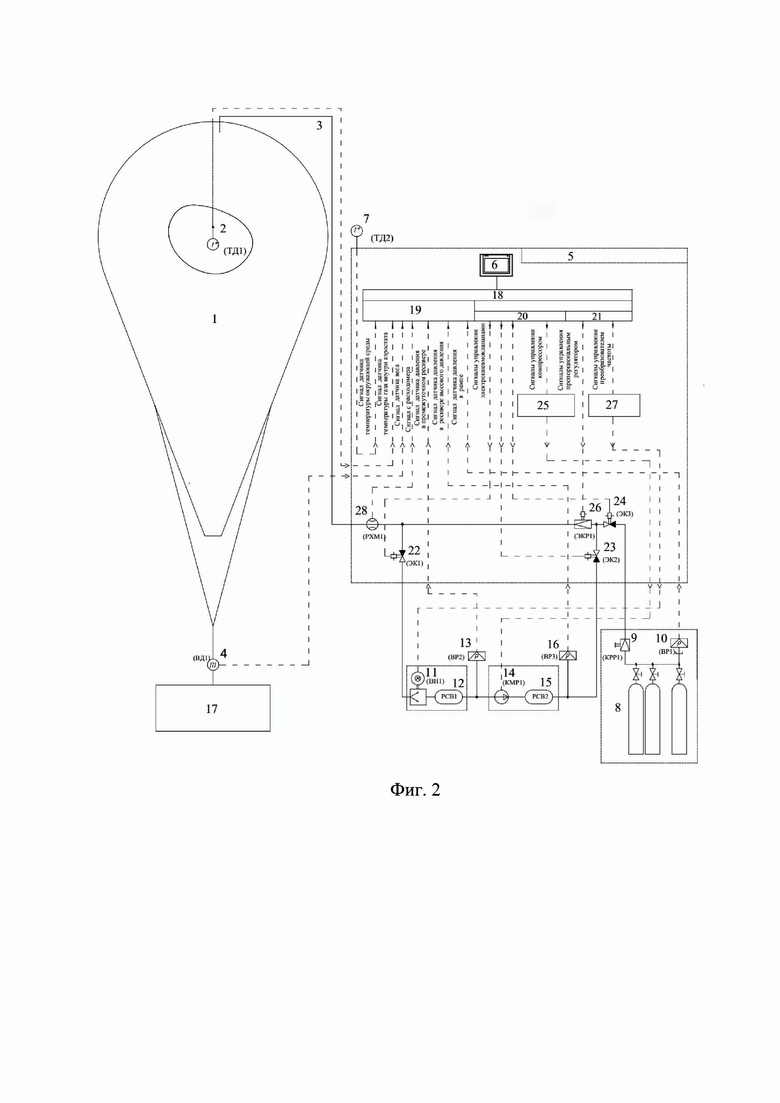
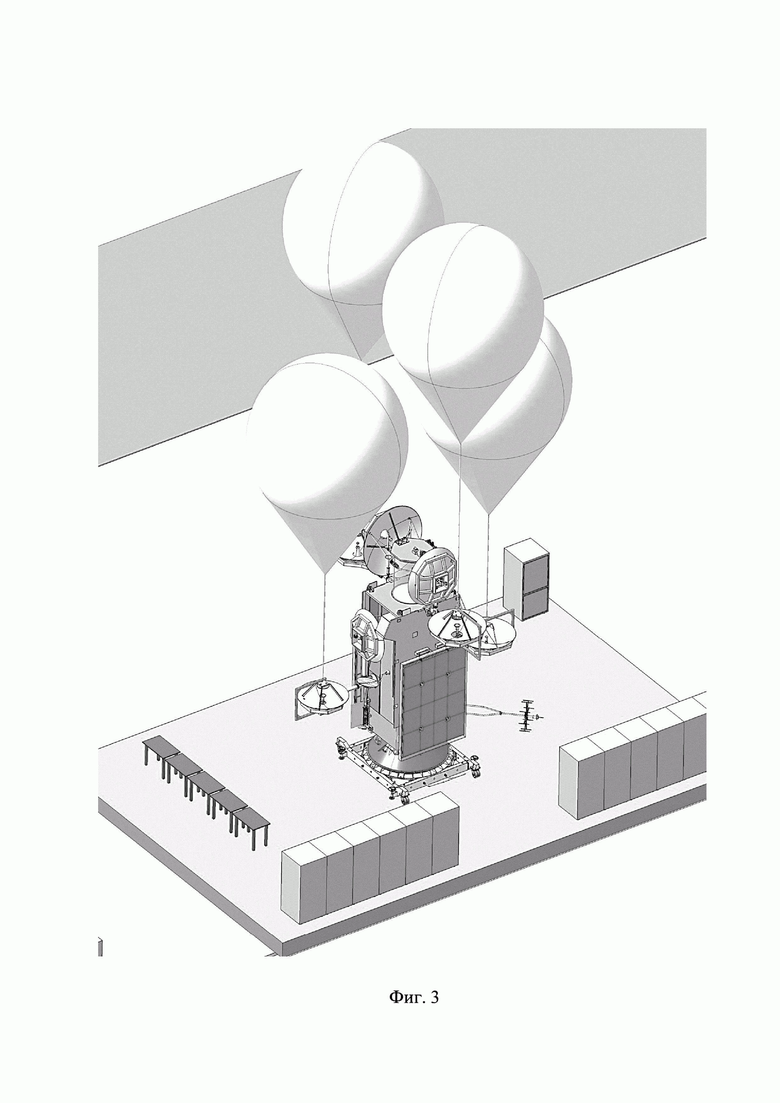
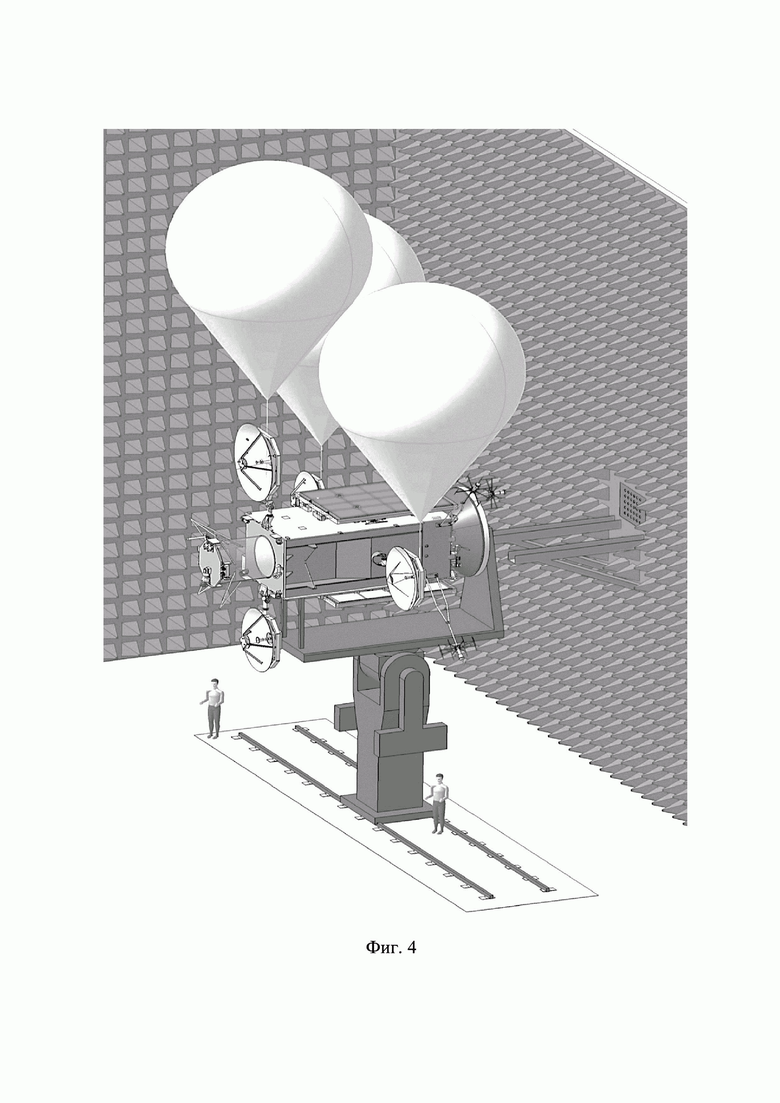
Сущность изобретения поясняется чертежами: общим видом устройства на фиг.1, схемой на фиг.2 и общими видами типовых операций обезвешивания: на фиг.3 - раскрытие антенных конструкций и фиг.4 - при снятии весовых характеристик антенн на разных стадиях раскрытия.
Способ имитации невесомости трансформируемых систем космических аппаратов осуществляется следующим образом. Трансформируемых элементы конструкций космических аппаратов (КА), например, складные панелей солнечных батарей, раскрываемые антенны, предназначенные для эксплуатации в условиях невесомости, при наземных испытаниях (экспериментальном уточнении или идентификации параметров математической модели конструкции механизмов на Земле или при физической отработке и проверке работы систем управления трансформируемыми конструкциями на Земле до проведения летных испытаний) для устранения деформаций или разрушения под действием силы земного тяготения нуждаются в компенсации весовой составляющей конструкции. Конструкция трансформируемой системы 17, например, антенных систем КА включает в себя штангу, или нескольких штанг, на конце которых крепятся антенны в сложенном состоянии. Трансформация (раскрытие) конструкции, например, раскрытие антенны происходит в несколько технологических этапов. Первоначально из сложенного состояния от корпуса КА отходит штанга. В качестве привода используются предварительно натянутые (или наоборот сжатые) пружины. При раскрытии происходит расчековка - освобождение пружин (например, посредством пирочеки или пирозамка), и штанга с антенной отходит под воздействием пружинного привода от корпуса КА. Затем последовательно происходят следующие этапы раскрытия: это может быть поворот сложенной антенны относительно штанги и, собственно, раскрытие самой антенны. Все основные узлы этих механизмов раскрытия для облегчения конструкции рассчитаны на работу в невесомости, поэтому при наземных испытаниях необходимо компенсировать весовую составляющую в процессе раскрытия. Легко увидеть, что по мере раскрытия, усилие компенсации весовой составляющей должно изменяться на каждом этапе трансформации. Для компенсации весовой составляющей желательно прикладывать усилие перпендикулярно вверх на всем диапазоне раскрытия объекта, и исключить нештатное нагружение объекта раскрытия как недостаточным, так избыточным усилием компенсации весовой составляющей.
Для этого аэростат 1, наполненный наполнение газом, имеющим меньший удельный вес, чем воздух (например, гелий) прикрепляется к трансформируемой системе. Основываясь на принципе действия аэростата, основанном на описанном выше законе Архимеда, для создания необходимой подъемной силы на каждом этапе имитации невесомости трансформируемой системы измеряют температуру воздуха окружающей среды датчиком 7 (ТД2) и температуру газа внутри аэростата датчиком 2 (ТД1). Управляющим устройством 5, установленным на земле и связанным с датчиками температуры 2, 7, и с учетом измеренных температур, рассчитывают количество газа, которое необходимо добавить или откачать из аэростата 1. При этом газ откачивают из аэростата 1 через двухступенчатую систему эвакуации газа, сначала вакуумным насосом 11 (ВН1) в ресивер низкого давления 12(РСВ1), а затем компрессором 14 (КМР1) в ресивер высокого давления 15 (РСВ2) для дальнейшего хранения. Добавление газа происходит либо из ранее откачанного газа из ресивера высокого давления 15 (РСВ2), либо из баллонной рампы высокого давления 8.Источник добавления газа определяется управляющим устройством 5 по исходным параметрам: показания весового датчика 4 (ВД1), закрепленного между аэростатом 1 и трансформируемой системой 17, показаниям датчика давления в ресивере высокого давления 16 (ВР3), датчика давления 10 (ВР1) в баллонной рампе высокого давления. Чтобы учесть инерционность системы, на электропневматическом пропорциональном регуляторе 26 (ЭКР1), установленном в линии подачи газа устанавливают рассчитанное управляющим устройством 5 давление подаваемого в аэростат газа, необходимое для требуемой по динамике процесса скорости изменения подъемной силы, а расходомером 28 (РХМ1), установленным после пропорционального регулятора в системе наполнения-опорожнения, контролируют количество газа, подаваемого или откачиваемого из аэростата 1.
Компенсация веса происходит по расчетным графикам. Точное определение графика изменения усилия компенсации весовой составляющей в процессе раскрытия трансформируемых конструкций представляет сложную задачу для теоретического расчета. Актуальным становится предварительное непосредственное снятие весовой характеристики трансформируемой системы в процессе поэтапного раскрытия - экспериментального уточнения параметров математической модели, что также становится возможным при использовании предлагаемого способа. Весовые характеристики снимаются по показаниям, например, весового датчика 4 (ВД1), закрепленного между аэростатом 1 и трансформируемой системой 17. В дальнейшем снятая весовая характеристика может использоваться для улучшения качества имитации невесомости.
На фиг.1 представлено заявленное устройство, которое включает в себя аэростат 1, наполненный рабочим телом - газом легче воздуха (например, гелием), внутри которого установлен датчик температуры 2 (ТД1) с электрическим аналоговым выходом для измерения температуры рабочего тела. К аэростату 1 присоединен гибкий (например, полимерный) шланг 3 для подачи и откачивания рабочего тела из аэростата. Между аэростатом 1 и трансформируемой системой - объектом обезвешивания 17 установлен весовой датчик 4 (ВД1). Установленное на земле управляющее устройство 5 на основе модульного программируемого микроконтроллера включает в себя панель оператора 6; связанный с управляющим устройством датчик температуры рабочего тела внутри аэростата 2 (ТД1); датчик температуры 7 (ТД2) с электрическим аналоговым выходом для измерения температуры окружающего воздуха; баллонную рампу 8 с необходимым количеством баллонов высокого давления с рабочим телом, оснащенную газовым редуктором 9 (КРР1) понижающим давление и датчиком давления 10 (ВР1) с электрическим аналоговым выходом; установленный в линии подачи и откачки газа электропневматический пропорциональный регулятор давления 26 (ЭКР1), систему управляемых электропневмоклапанов открытия-закрытия магистралей 22, 23, 24 (ЭК1, ЭК2, ЭК3); установленный после попорционального регулятора давления расходомер 28 (РХМ1) с электрическим аналоговым выходом - для измерения объёмного количества закачиваемого или откачиваемого газа; двухступенчатую систему эвакуации газа, связанную с линией подачи и откачки, включающую в себя вакуумный насос 11 (ВН1); ресивер низкого давления 12 (РСВ1), оснащенный датчиком давления 13 (ВР2) с электрическим аналоговым выходом; компрессор 14 (КМР1); ресивер высокого давления 15 (РСВ2), оснащенный датчиком давления 16 (ВР3) с электрическим аналоговым выходом.
На схеме фиг.2 представлена схема управляющего устройства 5 на основе программируемого микроконтроллера модульного типа 18, с подключенной к нему панелью оператора 6 и модулями:
- аналоговых входов 19 - для ввода сигналов с весового датчика 4, с датчиков температуры 2, 7 (ТД1, ТД2), с датчиков давления 10, 13, 16 (ВР1, ВР2, ВР3), с расходомера 28 (РХМ1);
- модули дискретных выходов 20 - для подачи сигналов управления электропневмоклапанами открытия-закрытия магистралей подачи и откачки рабочего тела 22, 23, 24 (ЭК1, ЭК2, ЭК3) и для включения компрессора высокого давления 14 (КМР1) посредством пускателя электромагнитного 25;
- модули аналоговых выходов 21 - для управления пропорциональным регулятором давления 26 (ЭКР1) и преобразователем частоты 27 - регулятором оборотов (производительности) вакуумного насоса 11 (ВН1).
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ИМИТАЦИИ НЕВЕСОМОСТИ | 2014 |
|
RU2565807C2 |
| ЭЛЕКТРИЧЕСКИЙ ПАРОВОЙ АЭРОСТАТ | 2013 |
|
RU2508227C1 |
| ПРИВЯЗНОЙ АЭРОСТАТ | 2001 |
|
RU2214346C2 |
| СПОСОБ ОБЕЗВЕШИВАНИЯ ТРАНСФОРМИРУЕМЫХ СИСТЕМ КОСМИЧЕСКИХ АППАРАТОВ | 2018 |
|
RU2711774C2 |
| Привязной тепловой аэростат с подогревом по электрическому кабелю с земли | 2016 |
|
RU2632551C1 |
| Способ проведения модальных испытаний многосегментных нежестких конструкций | 2017 |
|
RU2662255C1 |
| КОМПЛЕКС ВОЗДУШНОГО НАБЛЮДЕНИЯ НА ОСНОВЕ ПРИВЯЗНОГО АЭРОСТАТА | 2011 |
|
RU2462390C1 |
| ЗМЕЙКОВЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ А.С.КУЗЬМИНА | 1992 |
|
RU2005649C1 |
| СОЛНЕЧНАЯ АЭРОСТАТНО-МОБИЛЬНАЯ ЭЛЕКТРОСТАНЦИЯ (САМЭ) | 2020 |
|
RU2739220C1 |
| ПРИВЯЗНОЙ АЭРОСТАТ | 1989 |
|
RU2028249C1 |
Изобретение относится к испытательной технике, а более конкретно к способу и устройству имитации невесомости трансформируемых систем космических аппаратов. Способ имитации невесомости трансформируемых систем космических аппаратов включает прикрепление привязного аэростата к трансформируемой системе. На каждом этапе имитации невесомости трансформируемой системы измеряют температуру воздуха окружающей среды и температуру газа внутри аэростата. Рассчитывают количество газа, которое необходимо добавить или откачать из аэростата. Газ откачивают из аэростата сначала вакуумным насосом в ресивер низкого давления, затем компрессором в ресивер высокого давления. На электропневматическом пропорциональном регуляторе, установленном в линии подачи газа, устанавливают рассчитанное управляющим устройством давление подаваемого в аэростат газа, необходимое для требуемой по динамике процесса скорости изменения подъемной силы. Расходомером, установленным после пропорционального регулятора в линии подачи газа, контролируют количество газа, подаваемого или откачиваемого из аэростата. Достигается снижение аварийности. 2 н. и 1 з.п. ф-лы, 4 ил.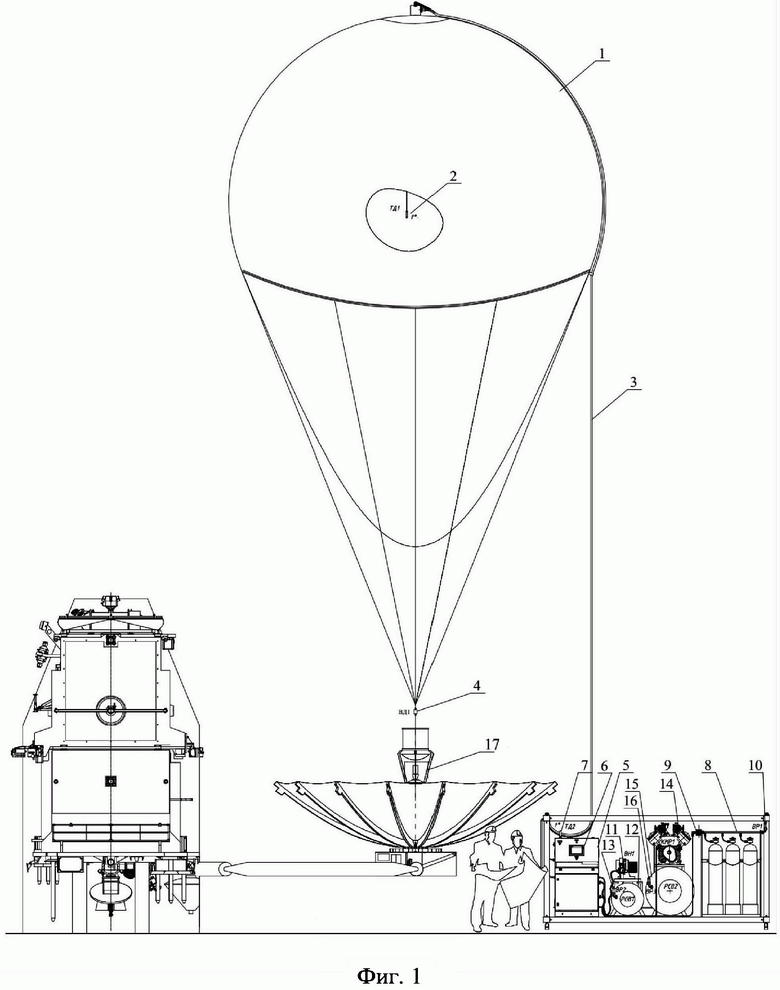
1. Способ имитации невесомости трансформируемых систем космических аппаратов, включающий наполнение газом, имеющим меньший удельный вес, чем воздух привязного аэростата, и прикрепление его к трансформируемой системе, имитацию невесомости в процессе раскрытия трансформируемой системы, отличающийся тем, что на каждом этапе имитации невесомости трансформируемой системы измеряют температуру воздуха окружающей среды и температуру газа внутри аэростата установленным на земле управляющим устройством, связанным с датчиками температуры, с учетом измеренных температур рассчитывают количество газа, которое необходимо добавить или откачать из аэростата, при этом газ откачивают из аэростата через двухступенчатую систему эвакуации газа, сначала вакуумным насосом в ресивер низкого давления, затем компрессором в ресивер высокого давления для дальнейшего хранения, добавляют газ либо из ранее откачанного из ресивера высокого давления, либо из баллонной рампы высокого давления, источник добавления газа определяют управляющим устройством по исходным параметрам, по показаниям весового датчика, закрепленного между аэростатом и трансформируемой системой, датчика давления в ресивере высокого давления, датчика давления в баллонной рампе высокого давления, при этом, чтобы учесть инерционность системы, на электропневматическом пропорциональном регуляторе, установленном в линии подачи газа, устанавливают рассчитанное управляющим устройством давление подаваемого в аэростат газа, необходимое для требуемой по динамике процесса скорости изменения подъемной силы, а расходомером, установленным после пропорционального регулятора в линии подачи газа, контролируют количество газа, подаваемого или откачиваемого из аэростата.
2. Способ по п.1, отличающийся тем, что снимают весовые характеристики трансформируемой системы по показаниям весового датчика.
3. Устройство для реализации способа по п.1, включающее привязной аэростат, заполненный рабочим газом легче воздуха, соединенный через газопровод к системе наполнения-опорожнения, включающей компрессор, а также управляющее устройство, отличающееся тем, что содержит весовой датчик с электрическим аналоговым выходом, закрепленный между аэростатом и обезвешиваемой трансформируемой системой, гибкий шланг линии подачи и откачки газа из аэростата, управляющее устройство на основе модульного программируемого микроконтроллера, установленное на земле и включающее в себя рампу с баллонами высокого давления с рабочим газом легче воздуха, оснащенную газовым редуктором, понижающим давление, и датчиком давления с электрическим аналоговым выходом, а также установленным в линии подачи и откачки газа электропневматическим пропорциональным регулятором давления, систему управляемых электропневмоклапанов открытия-закрытия магистралей и установленный после попорционального регулятора давления расходомер с электрическим аналоговым выходом для измерения объёмного количества закачиваемого или откачиваемого газа, связанные с управляющим устройством датчики температуры с электрическим аналоговым выходом для измерения температуры окружающего воздуха и температуры газа внутри аэростата, двухступенчатую систему эвакуации газа, связанную с линией подачи и откачки и включающую в себя вакуумный насос, компрессор и два ресивера низкого и высокого давления для хранения газа, откачанного из аэростата.
| JP 9131689 A, 20.05.1997 | |||
| СТЕНД ДЛЯ НАЗЕМНОЙ ОТРАБОТКИ РАЗВЕРТЫВАНИЯ ОРБИТАЛЬНОЙ ТРОСОВОЙ СИСТЕМЫ И СПОСОБ УПРАВЛЕНИЯ ИМ (ВАРИАНТЫ) | 1999 |
|
RU2164885C1 |
| Тормозное устройство к ударному испытательному стенду | 1981 |
|
SU954833A1 |
| Измерительный прибор | 1945 |
|
SU81314A2 |

