Изобретение относится к различным областям промышленности, прежде всего авиационной и ракетно-космической. В частности, изобретение относится к испытательной технике, к наземным испытаниям механизмов, имеющих гибкую, многозвенную конструкцию, рассчитанную на работу в невесомости.
Подобные конструкции (складные панели солнечных батарей космических аппаратов, раскрываемые многозвенные антенные конструкции и т.п.) необходимо равномерно «обезвешивать», прилагая усилие к каждому звену конструкции, в процессе перемещения этих звеньев относительно друг друга. Изобретение может быть использовано для «обезвешивания» крупногабаритных трансформируемых конструкций и устранения деформаций или разрушения под действием силы земного тяготения при наземных испытаниях (экспериментального уточнения или идентификации параметров математической модели конструкции механизмов на Земле) или при физической отработке и проверке работы систем управления трансформируемыми конструкциями на Земле до проведения летных испытаний.
Известно обезвешивающее устройство (см. заявку №98104331 RU, G01M 1/00). Оно выполнено в виде двухплечего рычага, шарнирно закрепленного в точке равновесия, на одном конце которого закреплен обезвешиваемый объект, а на другом - уравновешивающий груз, плечи рычага выполнены раздвижными и кинематически связанными. Возможно снабжение устройства вертикальной осью вращения, установление в подвесе испытываемого объекта датчика ошибки разгружающей силы и гироскопического датчика отклонения подвеса от вертикали. Обезвешивающее устройство может содержать несколько двухплечих рычагов.
Недостатком устройства является то, что его трудно применить при больших габаритах обезвешиваемой конструкции и нескольких перемещающихся относительно друг друга точках приложения усилия. Система рычагов получится неоправданно сложной, малогабаритной и нетехнологичной.
Известно также "Устройство обезвешивания элементов" (см. патент SU 1828261 A1, G01M 19/00). Оно содержит шестистепенное газостатическое устройство подвеса, включающее, например, сферическую газостатическую опору, плоскую газостатическую опору, подпятник которой находится в камере с газом, и следящую систему по поддерживанию заданного давления газа, в которую входят последовательно соединенные датчик давления, блок управления и исполнительный орган по регулировке давления; три следящие системы, обеспечивающие перемещение шестистепенного газостатического устройства подвеса соответственно по вертикали и в плоскости горизонта, причем следящая система по вертикали содержит привод вертикального перемещения, соединенный через блок управления с датчиком относительного вертикального перемещения подпятника плоской газовой опоры относительно корпуса камеры с газом, а два привода для горизонтального перемещения соединены через соответствующий блок управления с соответствующим датчиком, измеряющим относительное горизонтальное перемещение обезвешиваемого элемента конструкции относительно подпятника плоской газовой опоры.
Недостатком указанного аналога является чрезмерная сложность конструкции, обусловленная, в том числе, и применением газа под регулируемым давлением.
В качестве прототипа выбрана "Система имитации невесомости многозвенных механизмов" (см. патент RU 2402470 С2, G01M 19/00), состоящая из блока управления, в состав которого входят персональный компьютер, микроконтроллер, и соответствующее программное обеспечение, система содержит и три исполнительных механизма, каждый из которых состоит из весоизмерительной ячейки, соединенной с платформой с датчиком угла горизонтального отклонения стропа и электроприводом, редуктор которого связан с катушкой, на которой намотан строп, идущий на тросоукладчик, на котором установлены датчик угла, определяющий его вертикальное отклонение, и датчик расхода стропа. Концы стропа с исполнительных механизмов соединяются, образуя точку подвеса обезвешиваемого элемента.
Недостатком системы является необходимость располагать исполнительные механизмы на расстоянии, равном длине пути раскрытия обезвешиваемого объекта, что делает невозможным применение подобной системы в случае, если точек приложения усилия несколько и они первоначально расположены рядом. Кроме этого стропы находятся под углом к обезвешиваемому элементу, что легко может привести к нештатному нагружению системы раскрытия боковым усилием.
Отличительной особенностью технологического процесса раскрытия крупногабаритных трансформируемых конструкций является то, что первоначально, когда конструкция находится в сложенном положении, точки приложения усилий обезвешивания расположены компактно, а затем, по мере раскрытия и приведения в рабочее состояние, эти точки удаляются друг от друга, и каждая по самостоятельной траектории проходит свое расстояние. Создание универсальной системы имитации невесомости для подобных конструкций предполагает способность такой системы обеспечивать необходимое количество точек приложения усилия, и в то же время разумные габариты всего устройства по вертикали, учитывая значительные размеры обезвешиваемых конструкций. Все привода, механизмы в отличие от приведенных выше аналогов должны иметь специфическую компоновку, позволяющую разместить все оборудование таким образом, чтобы имелась возможность присоединить необходимое количество тросов системы к обезвешиваемому объекту. Для компенсации весовой составляющей желательно прикладывать усилие перпендикулярно вверх на всем диапазоне раскрытия объекта, чтобы исключить нештатное нагружение объекта раскрытия боковыми усилиями.
Задачей изобретения является упрощение и унификация конструкции, создание возможности имитации невесомости в наземных условиях для подвижных элементов трансформируемых механизмов, когда необходимо большое количество точек приложения усилий обезвешивания к подвижным элементам, предназначенным для работы в состоянии невесомости.
Указанная цель достигается тем, что в предлагаемой системе имитации невесомости имеется блок управления на основе компьютера и микроконтроллера и необходимое количество модулей, установленных один над другим. Каждый модуль включает в себя два сервопривода, расположенных с его торцевой части, шкивы которых работают на общий зубчатый ремень, и на нем через пассивные шкивы крепится каретка, перемещающаяся по оси X по направляющим, и тележка, закрепленная на общем зубчатом ремне и перемещающаяся по оси Y по собственной направляющей. На тележке имеется шкив, через который проходит гибкая связь, соединяющая подвешенный через блоки компенсирующий груз с обезвешиваемым элементом, и также на тележке имеется датчик-инклинометр, определяющий вертикальное положение гибкой связи, по сигналам с которого блок управления включает сервопривода устройства и перемещает каретку и тележку, поддерживая вертикальность гибкой связи по отношению к объекту «обезвешивания». Количество модулей и размеры каждого модуля подбираются исходя из геометрии и необходимого числа точек приложения усилия «обезвешивания» применительно к конкретному объекту.
Модульный принцип построения позволяет адаптировать систему под различные характеристики из небольшого, экономически обоснованного количества типоразмеров модулей.
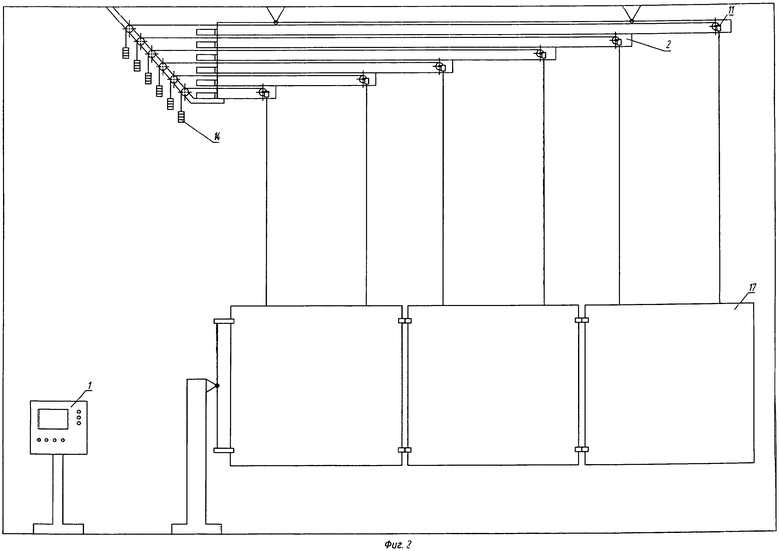
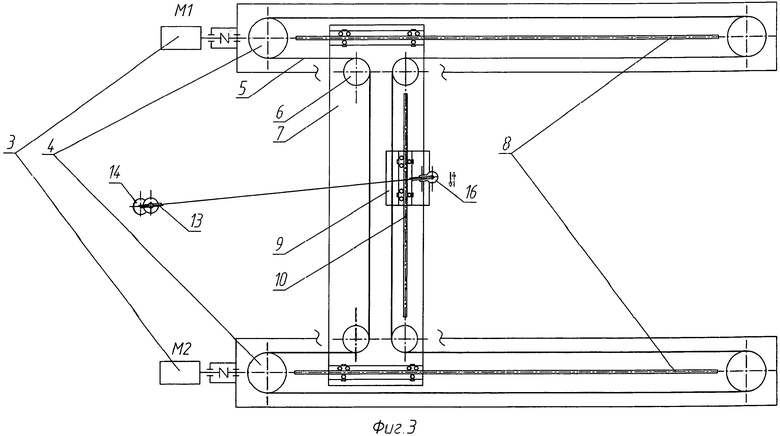
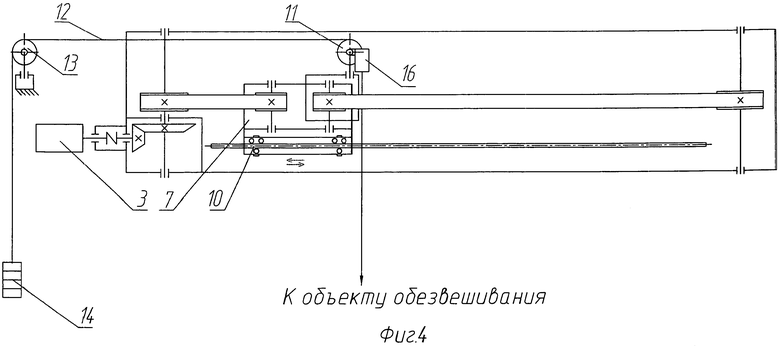
Сущность изобретения поясняется чертежами, где на фиг.1 представлена система имитации в исходном положении, на фиг.2 - в конечном положении, на фиг.3 представлена кинематическая схема модуля - вид сверху, на фиг 4 - кинематическая схема модуля, вид сбоку.
Система включает в себя (см. фиг.1) блок управления 1 и необходимое количество модулей 2 (для примера на рисунке показана система с шестью модулями). Каждый модуль (см. фиг.3 и фиг.4) включает в себя два сервопривода 3 (M1 и М2), рабочие шкивы 4 которых работают на общий зубчатый ремень 5, на котором через пассивные шкивы 6 крепится каретка 7, перемещающаяся по двум направляющим 8, и тележка 9, закрепленная на ремне 5 и перемещающаяся по направляющей 10. На тележке 9 имеется шкив 11, через который проходит гибкая связь 12, соединяющая подвешенный через блок 13 компенсирующий груз 14 с объектом обезвешивания 17, причем для уменьшения сопротивления от трения гибкой связи шкив 11 и блок 13 установлены с возможностью поворота в горизонтальной плоскости при перемещениях гибкой связи. Также на тележке имеется датчик-инклинометр 16, определяющий величину отклонения гибкой связи от вертикального положения по двум направлениям. Сигналы от датчика-инклинометра 16 поступают в систему управления 1, в которой задается алгоритм и динамические характеристики сервопривода 3 (M1 и М2) системы и скорости, ускорения, с целью отслеживания поддержания вертикальности гибкой связи.
Предлагаемый модуль работает следующим образом: система управления 1 формирует алгоритм одновременной работы сервоприводов модуля таким образом, что имеется возможность:
- перемещать каретку 7 синхронным разнонаправленным вращением шкивов 4 сервоприводов 3,
- перемещать тележку 9 синхронным однонаправленным вращением шкивов 4 сервоприводов 3,
- выполнять одновременное движение каретки 7 и тележки 9 при включении одного из сервоприводов 3 либо при вращении шкивов сервоприводов 4 с разной скоростью. Таким образом, два привода, компактно расположенные с торца модуля, позволяют осуществлять одновременное позиционирование тележки и каретки модуля.
Предлагаемая система имитации невесомости работает следующим образом.
Перед процессом раскрытия устанавливаются необходимое количество компенсирующих грузов 14, гибкие связи 12 присоединяются к элементам обезвешиваемого объекта, находящегося в сложенном положении (см. фиг.1 «Исходное положение»). При раскрытии - элементы объекта начинают поступательное движение, система имитации невесомости по сигналам с датчиков 16 осуществляет позиционирование тележек 9 таким образом, чтобы гибкие связи 11 всех тележек системы были вертикальны по отношению к объекту обезвешивания 17 вплоть до конечного расположения системы (см. рис.2 «Конечное положение»).
Таким образом, заявленная система имитации невесомости ориентирована на различные скорости движения элементов обезвешиваемой конструкции, а также имеет возможность удерживать весь объект в целом в обезвешенном состоянии. Система имитации невесомости позволяет обезвешивать элементы конструкции, имеющие разную скорость движения в процессе раскрытия, так как работает в следящем режиме по сигналам с датчиков инклинометров, и каждый модуль системы работает на каждый отдельный элемент обезвешиваемой конструкции.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ИМИТАЦИИ НЕВЕСОМОСТИ МЕХАНИЗМОВ С ГИБКОЙ КОНСТРУКЦИЕЙ ЭЛЕМЕНТОВ | 2006 |
|
RU2334970C2 |
| СИСТЕМА ИМИТАЦИИ НЕВЕСОМОСТИ МНОГОЗВЕННЫХ МЕХАНИЗМОВ | 2008 |
|
RU2402470C2 |
| СПОСОБ ИМИТАЦИИ НЕВЕСОМОСТИ ТРАНСФОРМИРУЕМЫХ СИСТЕМ КОСМИЧЕСКИХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2020 |
|
RU2753060C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ УЧЕБНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ КОСМОНАВТОВ (АСТРОНАВТОВ) К ВНЕКОРАБЕЛЬНОЙ ДЕЯТЕЛЬНОСТИ (ВАРИАНТЫ) | 2013 |
|
RU2524503C1 |
| ПОВОРОТНОЕ УСТРОЙСТВО С ТРОСОБЛОЧНОЙ СИСТЕМОЙ ДЛЯ ОБЕЗВЕШИВАНИЯ РАСКРЫВАЕМЫХ КОНСТРУКЦИЙ КОСМИЧЕСКОГО АППАРАТА | 2019 |
|
RU2721448C1 |
| УСТРОЙСТВО ДЛЯ ОБЕЗВЕШИВАНИЯ ЭЛЕМЕНТОВ КОСМИЧЕСКИХ АППАРАТОВ ПРИ НАЗЕМНЫХ ИСПЫТАНИЯХ | 2020 |
|
RU2744925C1 |
| СПОСОБ ОБЕЗВЕШИВАНИЯ ТРАНСФОРМИРУЕМЫХ СИСТЕМ КОСМИЧЕСКИХ АППАРАТОВ | 2018 |
|
RU2711774C2 |
| УСТРОЙСТВО ОБЕЗВЕШИВАНИЯ ЭЛЕМЕНТОВ | 1990 |
|
SU1828261A1 |
| Способ обезвешивания и возбуждения колебаний при модальных испытаниях и устройство для его осуществления | 2017 |
|
RU2677942C2 |
| Способ проведения модальных испытаний многосегментных нежестких конструкций | 2017 |
|
RU2662255C1 |
Изобретение относится к испытательной технике, в частности к наземным испытаниям механизмов, предназначенных для работы в невесомости, и может быть использовано для обезвешивания крупногабаритных трансформируемых конструкций. Устройство состоит из блока управления на основе компьютера и микроконтроллера и необходимого количества модулей, установленных один над другим. Каждый модуль включает в себя два сервопривода, расположенных с его торцевой части, шкивы которых работают на общий зубчатый ремень, и на нем через пассивные шкивы крепится каретка, перемещающаяся по направляющим, и тележка, закрепленная на общем зубчатом ремне и перемещающаяся по собственной направляющей. При этом на тележке имеется шкив, через который проходит гибкая связь, соединяющая подвешенный через блоки компенсирующий груз с обезвешиваемым элементом. Также на тележке имеется датчик-инклинометр, определяющий вертикальное положение гибкой связи, по сигналам с которого блок управления включает сервопривода устройства и перемещает каретку и тележку, поддерживая вертикальность гибкой связи по отношению к объекту обезвешивания. Количество модулей и размеры каждого модуля подбираются исходя из геометрии и необходимого числа точек приложения усилия обезвешивания применительно к конкретному объекту. Технический результат заключается в упрощении конструкции, возможности имитации невесомости для подвижных элементов трансформируемых механизмов с большим количество точек приложения усилий обезвешивания к подвижным элементам. 3 ил.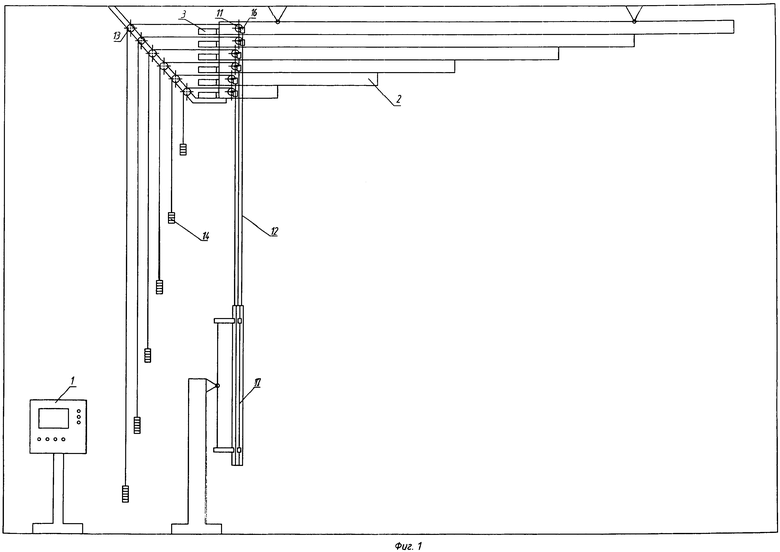
Система имитации невесомости, состоящая из блока управления на основе компьютера и микроконтроллера и необходимого количества модулей, установленных один над другим, отличающаяся тем, что каждый модуль включает в себя два сервопривода, расположенных с его торцевой части, шкивы которых работают на общий зубчатый ремень, и на нем через пассивные шкивы крепится каретка, перемещающаяся по оси X по направляющим, и тележка, закрепленная на общем зубчатом ремне и перемещающаяся по оси Y по собственной направляющей, причем на тележке имеется шкив, через который проходит гибкая связь, соединяющая подвешенный через блоки компенсирующий груз с обезвешиваемым элементом, и также на тележке имеется датчик-инклинометр, определяющий вертикальное положение гибкой связи, по сигналам с которого блок управления включает сервопривода устройства и перемещает каретку и тележку, поддерживая вертикальность гибкой связи по отношению к объекту «обезвешивания», причем количество модулей и размеры каждого модуля подбираются исходя из геометрии и необходимого числа точек приложения усилия «обезвешивания» применительно к конкретному объекту.
| СИСТЕМА ИМИТАЦИИ НЕВЕСОМОСТИ МНОГОЗВЕННЫХ МЕХАНИЗМОВ | 2008 |
|
RU2402470C2 |
| УСТРОЙСТВО ИМИТАЦИИ НЕВЕСОМОСТИ МЕХАНИЗМОВ С ГИБКОЙ КОНСТРУКЦИЕЙ ЭЛЕМЕНТОВ | 2006 |
|
RU2334970C2 |
| УСТРОЙСТВО ОБЕЗВЕШИВАНИЯ ЭЛЕМЕНТОВ | 1990 |
|
SU1828261A1 |
| Стенд для моделирования невесомости двухзвенных механизмов | 1987 |
|
SU1467418A1 |
| JP 4139000 A 13.05.1992 | |||

