Область техники, к которой относится изобретение
Данное изобретение относится к области электрических устройств.
В частности, оно относится к устройству управления, содержащему корпус, в котором находится по меньшей мере один переключатель, и приводной палец, подвижный относительно корпуса и имеющий на стороне приводного пальца, обращенной к корпусу, по меньшей мере один выступающий элемент, такой как ребро жесткости.
Уровень техники
В документе CN105336520 описано устройство управления этого типа.
Согласно этому документу, приводной палец имеет несколько ребер жесткости, некоторые из которых взаимодействуют с упругими лапками промежуточной детали, установленной на корпусе, тогда как другие взаимодействуют напрямую с переключателем.
Из документа DE 20 2004 005 837 известен также переключатель, содержащий поворотную клавишу и корпус, в котором находится электронный модуль.
Сторона корпуса, закрытая поворотной клавишей, имеет приводные элементы W-образной формы, центральная ветвь которых содержит одновременно опорную зону для элемента, выступающего из поворотной клавиши, и рабочую зону, находящуюся над элементом переключения электронного модуля.
Раскрытие сущности изобретения
В этом контексте настоящим изобретением предложено вышеупомянутое устройство управления, в котором корпус содержит деформирующуюся область, от которой отходят первый язычок, выполненный с возможностью взаимодействия с указанным элементом по меньшей мере в одном положении приводного пальца, и второй язычок (по меньшей мере частично перемещающийся) для приведения в действие переключателя.
В таком устройстве движение приводного пальца (под действием пользователя) приводит к перемещению и/или деформации первого язычка и, следовательно, к деформации деформирующейся области, что влечет за собой перемещение и/или деформацию второго язычка, приводящего в действие переключатель.
Поскольку второй язычок выполнен отдельно от первого язычка, конструктор устройства может легко регулировать взаимодействие этих элементов, в частности, изменяя форму и расположение деформирующейся области и язычков, поэтому конструктор может свободно выбирать ощущение пользователя, когда он перемещает приводной палец для приведения в действие переключателя.
Предложенная конструкция позволяет также избегать прямого действия элемента, такого как ребро жесткости приводного пальца, на переключатель и ограничивает, таким образом, риски повреждения этого переключателя.
Это устройство управления имеет также следующие неограничивающие и предпочтительные отличительные признаки:
- первый язычок и второй язычок расположены параллельно друг другу и/или на расстоянии друг от друга;
- указанный выступающий элемент является ребром жесткости (или, в варианте, штифтом, штырьком или крестовиной);
- приводной палец содержит другой выступающий элемент (например, другое ребро жесткости);
- третий язычок (отличный от первого язычка и от второго язычка), который может быть деформирующимся, отходит от деформирующейся области и расположен напротив указанного другого элемента (например, напротив указанного другого ребра жесткости);
- первый язычок и третий язычок расположены с двух сторон от второго язычка;
- первый язычок и/или второй язычок являются деформирующимися для приведения в действие переключателя;
- приводной палец содержит лапку, заходящую в выемку корпуса и имеющую первую контактную поверхность, обращенную к указанной стороне приводного пальца;
- первый язычок является упругим и входит в контакт с указанным элементом (в описанном ниже примере входит в контакт с указанным ребром жесткости), прижимая первую контактную поверхность к второй контактной поверхности, выполненной на корпусе и ограничивающей указанную выемку;
- деформирующаяся область, первый язычок и второй язычок выполнены в передней стенке корпуса;
- приводной палец содержит бортик, выполненный на периферии приводного пальца и окружающий указанную переднюю стенку;
- переключатель находится на печатной схеме, смонтированной в корпусе;
- переключатель является микропереключателем;
- второй язычок имеет выступ, обращенный к переключателю;
- деформирующаяся область частично ограничена множеством вырезов;
- указанная сторона приводного пальца содержит дополнительный выступающий элемент (такой как дополнительное ребро жесткости);
- корпус содержит другую деформирующуюся область, от которой отходит четвертый язычок, выполненный с возможностью взаимодействия с дополнительным элементом (с дополнительным ребром жесткости в описанном примере), и пятый язычок (по меньшей мере частично перемещающийся) для приведения в действие другого переключателя (или другого микропереключателя, смонтированного на печатной схеме);
- четвертый язычок и/или пятый язычок являются деформирующимися (при этом пятый язычок может деформироваться для приведения в действие печатной схемы);
- корпус содержит по меньшей мере один штифт, частично окруженный выемкой;
- указанная сторона приводного пальца содержит установочное ребро жесткости, заходящее в указанную выемку.
Краткое описание чертежей
Изобретение и его осуществление будут более понятны из нижеследующего описания со ссылками на прилагаемые чертежи, представленные в качестве неограничивающих примеров.
На прилагаемых чертежах:
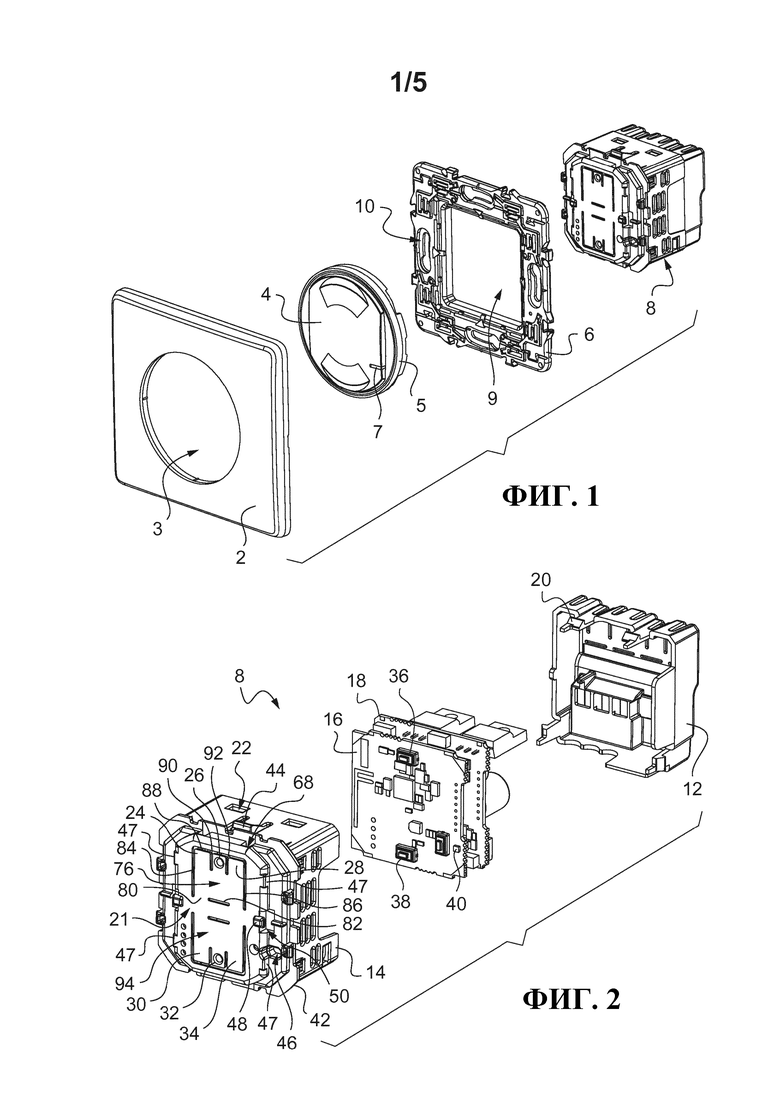
на фиг. 1 показано заявленное устройство управления, вид в перспективе с пространственным разделением деталей;
на фиг. 2 показан рабочий механизм устройства управления, изображенный на фиг. 1 вид в перспективе с пространственным разделением деталей;
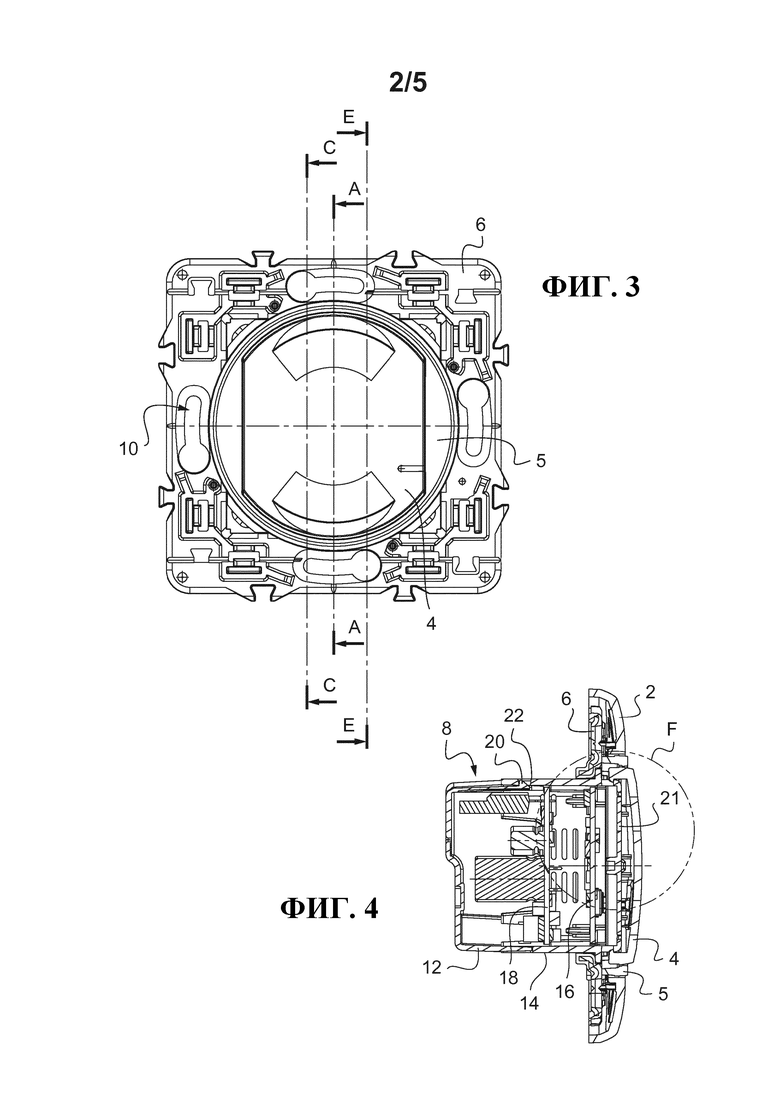
на фиг. 3 показано устройство управления, изображенное на фиг. 1, без его облицовочной пластины, вид спереди;
на фиг. 4 показано устройство управления, изображенное на фиг. 1, вид в разрезе по плоскости Е-Е, отмеченной на фиг. 3;
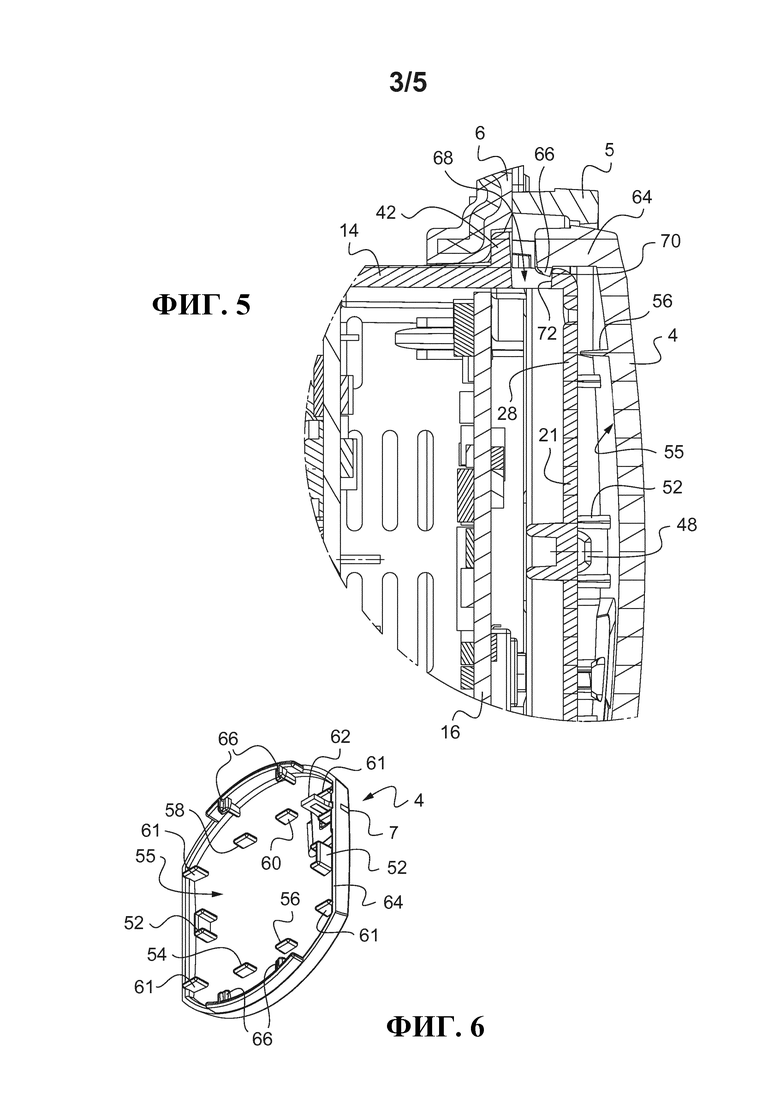
на фиг. 5 показана деталь F, изображенная на фиг. 4;
на фиг. 6 показан приводной палец устройства управления, изображенный на фиг. 1, вид в перспективе сзади;
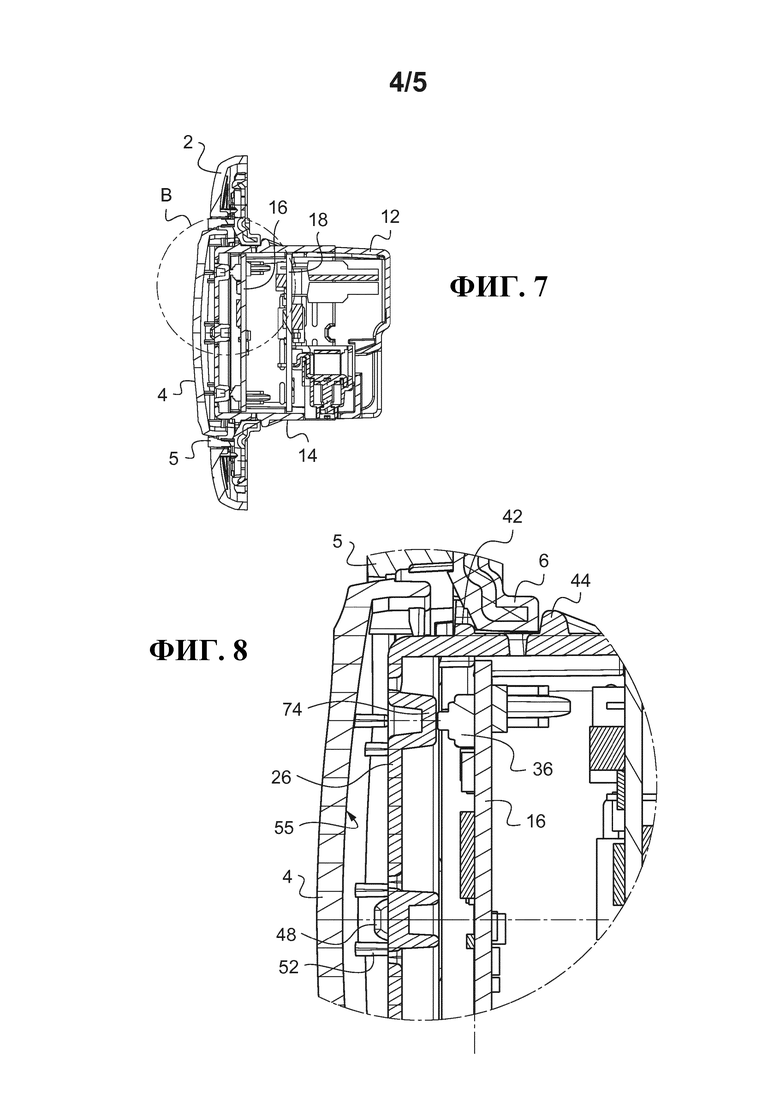
на фиг. 7 показано устройство управления, изображенное на фиг. 1, вид в разрезе по плоскости А-А, отмеченной на фиг. 3;
на фиг. 8 показана деталь В, изображенная на фиг. 7;
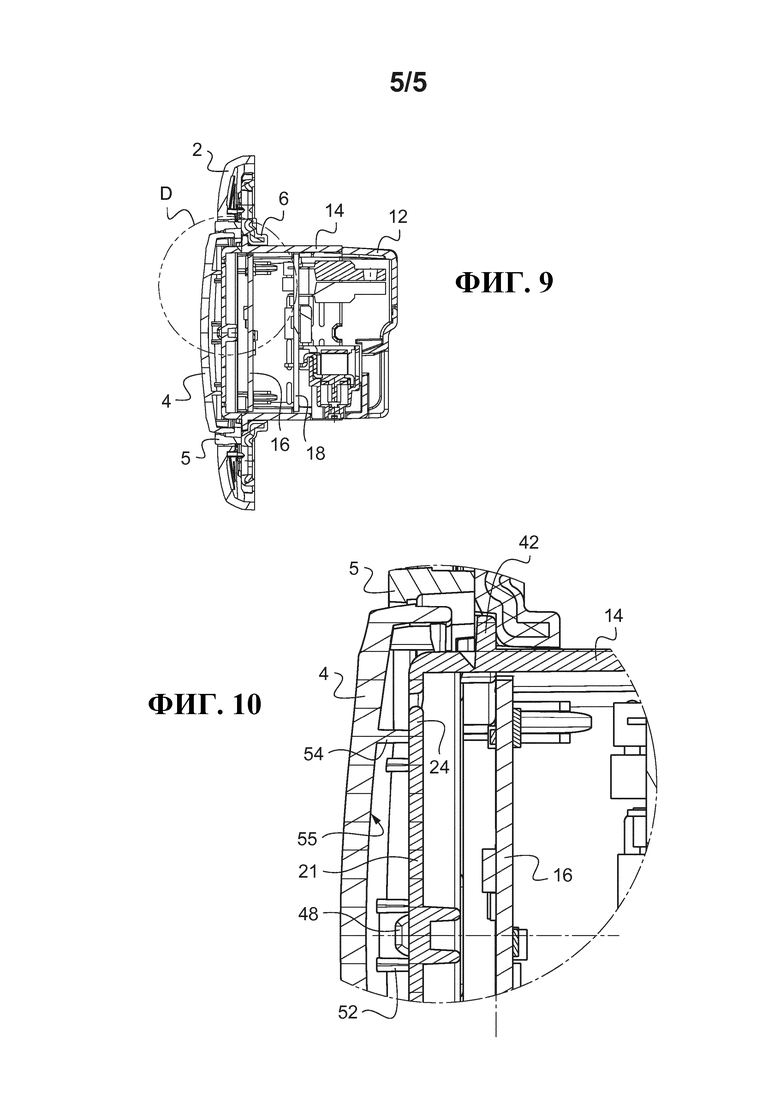
на фиг. 9 показано устройство управления, изображенное на фиг. 1, вид в разрезе по плоскости С-С, отмеченной на фиг. 3;
на фиг. 10 показана деталь D, изображенная на фиг. 9.
На фиг. 1 показано заявленное устройство управления.
Как показано на этой фигуре, устройство управления содержит отделочную пластину 2, приводной палец 4, кронштейн 6 прибора и рабочий механизм 8.
В описании термины «перед» и «зад» будут использоваться относительно направления взгляда пользователя в сторону стены, на которой устанавливают устройство управления. Таким образом, когда устройство управления установлено в комнате, перед будет обозначать сторону, обращенную внутрь комнаты, а зад будет обозначать сторону, обращенную в противоположном направлении наружу комнаты.
Кронштейн 6 прибора имеет форму рамки, имеющей центральный проем 9, и обеспечивает монтаж устройства управления в корпусе (не показан), таком как внутренняя коробка, предназначенная для размещения в выемке стены, где должно быть установлено устройство управления. В варианте, корпус может быть установлен таким образом, чтобы выступать на стене.
Для этого кронштейн 6 прибора содержит отверстия 10 в виде замочных скважин, через которые может проходить крепежный винт, заходящий также в гнездо, предусмотренное в вышеупомянутом корпусе.
Как показано на фиг. 1, каждое отверстие 10 содержит, с одной стороны, вытянутую часть, в которой располагают резьбовое тело соответствующего винта (эта вытянутая часть имеет закругление для обеспечения угловой выборки за счет скольжения резьбового гнезда в этой закругленной вытянутой части), и, с другой стороны, круглую концевую часть, обеспечивающую прохождение головки соответствующего винта.
Кроме того, устройство управления содержит кольцо 5, установленное на рабочем механизме 8 и окружающее приводной палец 4. Это кольцо 5 имеет наружную форму (в данном случае круглую), соответствующую форме центрального проема 3 отделочной пластины 2, и закрывает таким образом пространство (в данном случае в основном сбоку) между приводным пальцем 4 и внутренним краем этого центрального проема 3 (оставляя при этом зазор, обеспечивающий движение приводного пальца 4).
Как показано на фиг. 2, 4, 7 и 9, рабочий механизм 8 содержит корпус 12, 14, в котором находятся электрические схемы 16, 18, в данном случае электронные схемы 16, 18.
В описанном варианте осуществления корпус состоит из двух соединяемых частей, а именно донной части 12 и крышки 14, соединяемых посредством защелкивания, в данном случае за счет взаимодействия упругих лапок 20, выполненных в донной части 12, с соответствующими отверстиями 22, выполненными в крышке 14.
Обе части корпуса (то есть донная часть 12 и крышка 14) выполнены в данном случае из пластика.
Вышеупомянутые электронные схемы представляют собой две печатные схемы 16, 18, на каждой из которых находится набор электронных компонентов.
Корпус 12, 14 рабочего механизма 8 содержит на уровне передней стенки 21 крышки 14 множество деформирующихся язычков 24, 26, 28, 30, 32, 34, что будет более подробно описано ниже. Эти деформирующиеся язычки 24, 26, 28, 30, 32, 34 выполнены из пластика и, таким образом, обладают определенной упругостью.
Печатная схема 16, ближайшая к этим деформирующимся язычкам 24, 26, 28, 30, 32, 34 (то есть находящаяся ближе к переду), содержит на своей стороне, обращенной к деформирующимся язычкам 24, 26, 28, 30, 32, 34 (то есть к переду), множество переключателей, в данном случае микропереключателей 36, 38.
По меньшей мере один из этих микропереключателей (в данном случае микропереключатели 36, 38) находится напротив деформирующегося язычка (в данном случае соответственно деформирующихся язычков 26, 32), когда печатная схема 16 смонтирована в корпусе 12, 14.
Как показано на фиг. 2, передняя стенка 21 рабочего механизма 8 (в данном случае передняя стенка 21 крышки 14) имеет также сквозное отверстие 46 напротив источника 40 света (выполненного в данном случае в виде светодиода 40, установленного на печатной схеме 16). Как будет пояснено ниже со ссылками на фиг. 6, это сквозное отверстие 46 предназначено для прохождения световода 62, который неподвижно соединен с приводным пальцем 4 и передний конец которого доходит до уровня передней стороны приводного пальца 4, образуя сигнальную лампочку 7 (более наглядно показанную на фиг. 1).
Корпус 12, 14 рабочего механизма 8 (в данном случае крышка 14) имеет фланец 42, выполненный в данном случае по всему контуру передней стенки 21 и с отступом (назад) относительно передней стенки 21.
Как показано, в частности, на фиг. 1, 2 и 8, корпус 12, 14 рабочего механизма 8 (точнее в данном случае крышка 14) содержит также (на уровне боковой стенки) защелкивающийся (деформирующийся) язычок 44 для удержания кронштейна 6 прибора в контакте с фланцем 42: при установке рабочего механизма 8 на кронштейне 6 прибора (через центральный проем 9), защелкивающийся язычок 44 отходит за счет упругости, позволяя кронштейну 6 прибора войти в контакт с фланцем 42, после чего восстанавливает свое положение покоя, удерживая кронштейн 6 прибора в контакте с фланцем 42 (см., например, фиг. 8).
Как показано на фиг. 2, 5, 8 и 10, на передней стороне передней стенки 21 корпуса (в данном случае крышки 14) выполнен по меньшей мере один штифт 48, в данном случае два штифта, для позиционирования приводного пальца 4. Каждый из этих штифтов 48 в данном случае расположен на уровне края передней стенки 21 и частично окружен выемкой 50, предназначенной для захождения в нее соответствующего установочного ребра 52 жесткости, выполненного на приводном пальце 4.
Действительно, как показано на фиг. 6, приводной палец 4 имеет на своей задней стороне 55 (то есть на своей стороне, обращенной к рабочему механизму 8 в собранном виде устройства управления) соответствующие штифтам 48 два установочных ребра 52 жесткости C-образной формы, выполненных с возможностью захождения в выемки 50, частично окружая штифты 48.
Задняя сторона 55 приводного пальца 4 тоже содержит ребра 54, 56, 58, 60 жесткости, находящиеся соответственно напротив (в данном случае входя в контакт) соответствующих деформирующихся язычков 24, 28, 30, 34, когда приводной палец 4 установлен на рабочем механизме 8.
Как показано на фиг. 2 и 6, задняя сторона 55 приводного пальца 4 содержит также четыре других ребра 61 жесткости, выполненные с возможностью взаимодействовать соответственно (на уровне бокового края соответствующего ребра 61 жесткости) с четырьмя соответствующими поверхностями 47 крышки 14 (в данном случае с четырьмя боковыми поверхностями, перпендикулярными к передней стенке 21 и проходящими от этой передней стенки 21, как показано на фиг. 2), чтобы направлять приводной палец 4 в вертикальном направлении (то есть в направлении, перпендикулярном к его поворотной оси).
Наконец, как уже было указано выше, от задней стороны 55 приводного пальца напротив сквозного отверстия 46 выходит световод 62, осевая длина которого превышает осевую длину вышеупомянутых ребер 54, 56, 58, 60 жесткости и который проходит через это сквозное отверстие, доходя до источника 40 света, когда приводной палец 4 установлен на рабочем механизме 8.
Кроме того, в различных точках периферии приводного пальца 4 выполнены несколько лапок 66. В данном случае, как показано на фиг. 6, каждый край (в данном случае скругленной формы), находящийся на конце приводного пальца 4 (по длине приводного пальца 4) имеет две лапки 66.
Приводной палец 4, который в данном случае имеет вытянутую форму, содержит также бортик 64, выполненный в заднем направлении по всей периферии приводного пальца 4, окружая переднюю стенку 21 корпуса рабочего механизма 8, когда приводной палец 4 установлен на рабочем механизме 8.
Вышеупомянутые лапки 66 проходят в данном случае от бортика 64 в различных точках периферии приводного пальца 4, как было указано выше.
Кроме того, бортик 64 проходит дальше назад на уровне этих концевых (скругленных) краев, чем в других зонах периферии приводного пальца 4.
Как показано на фиг. 5, когда приводной палец 4 установлен на корпусе рабочего механизма 8, каждая из лапок 66 заходит в соответствующую выемку 68, выполненную в корпусе рабочего механизма 8 (в данном случае в крышке 14) сразу сзади передней стенки 21.
Каждая из лапок 66 имеет поверхность 70 напротив (то есть обращенную к) задней стороны 55 приводного пальца 4 (то есть поверхность 70 ориентирована вперед). Когда приводной палец 4 установлен на рабочем механизме 8 и находятся в положении покоя, эта поверхность 70 входит в контакт с поверхностью 72, ограничивающей выемку 66 и обращенной противоположно приводному пальцу 4 (то есть ориентированной назад), как показано на фиг. 5.
В описанном примере, когда приводной палец 4 находится в положении покоя (то есть в отсутствии воздействия со стороны пользователя), каждое из ребер 54, 56, 58, 60 жесткости входит в контакт с соответствующим деформирующимся язычком 24, 28, 30, 34, слегка деформируя (упруго) эти деформирующиеся язычки 24, 28, 30, 34 (в сторону печатной схемы 16, то есть в заднем направлении), как показано на фиг. 10 в случае ребра 54 жесткости и деформирующегося язычка 24.
Таким образом, в положении монтажа на корпусе рабочего механизма 8 приводной палец 4 постоянно находится в подпружиненном состоянии в переднем направлении (благодаря упругости деформирующихся язычков 24, 28, 30, 34, которые стремятся вернуться в свое не деформированное положение покоя), поэтому поверхность 70 каждой лапки 66 удерживается в контакте с соответствующей поверхностью 72, окаймляющей выемку 68, выполненную в корпусе рабочего механизма 8 (в данном случае в крышке 14).
Таким образом, приводной палец 4 удерживается на корпусе 12, 14 рабочего механизма 8.
Лапки 66 (и бортик 64, на котором они выполнены) тоже обладают определенной упругостью, позволяющей им отходить во время монтажа приводного пальца 4 на корпусе рабочего механизма 8.
Каждый деформирующийся язычок 26, 32, находящийся напротив микропереключателя 36, 38, содержит в данном случае выступ 74 в направлении соответствующего микропереключателя 36, 38 (то есть в заднем направлении) таким образом, что часть деформирующегося язычка 26, 32 (в данном случае выступ 74) находится в непосредственной близости от соответствующего микропереключателя 36, 38, когда приводной палец 4 установлен на рабочем механизме 8 и находится в положении покоя (то есть на него не воздействует пользователь), как показано на фиг. 8.
Как показано на фиг. 2, передняя стенка 21 крышки 14 содержит первую деформирующуюся область 76, частично ограниченную вырезами 82, 84, 86 таким образом, что эта первая деформирующаяся область 76 связана с другими областями передней стенки 21 только участками 80 меньшего размера (образующими шарниры) и может, таким образом, перемещаться относительно других частей корпуса 12, 14 рабочего механизма 8.
От этой деформирующейся области 76 проходят деформирующиеся язычки 24, 26, 28 (тоже выполненные в передней стенке 21).
В частности, передняя стенка 21 имеет боковой (прямолинейный) вырез 84, который образует край деформирующейся области 76 и край деформирующегося язычка 24. Кроме того, передняя стенка 21 имеет поперечный (прямолинейный) вырез 88, который соединяется с боковым вырезом 84 и образует свободный концевой край деформирующегося язычка 24, свободный концевой край деформирующегося язычка 26 и свободный концевой край деформирующегося язычка 28. В данном случае боковой вырез 84 и поперечный вырез 88 являются перпендикулярными.
Как показано на фиг. 2, деформирующийся язычок 24 (находящийся напротив и в данном случае входящий в контакт с ребром 54 жесткости приводного пальца 4) и деформирующий язычок 26 (находящийся напротив микропереключателя 36) разделены первым отверстием (в данном случае прямолинейным) 90, которое соединяется с поперечным вырезом 88. Таким образом, первое отверстие 90 образует край деформирующегося язычка 24 и край деформирующегося язычка 26. В данном случае первое отверстие 90 является перпендикулярным к поперечному вырезу 88 (и, следовательно, параллельным боковому вырезу 84).
Точно так же деформирующий язычок 26 (находящийся напротив микропереключателя 36) и деформирующийся язычок 28 (находящийся напротив и в данном случае входящий в контакт с ребром 56 жесткости приводного пальца 4) разделены вторым отверстием (в данном случае прямолинейным) 92. Таким образом, второе отверстие 92 образует край деформирующегося язычка 26 и край деформирующегося язычка 28. В данном случае второе отверстие 90 является перпендикулярным к поперечному вырезу 88.
Передняя стенка 21 корпуса (в данном случае крышки 14) имеет другой боковой (прямолинейный) вырез 86, который образует другой край деформирующейся области 76 и край деформирующегося язычка 28. Этот другой боковой вырез 86 соединяется с поперечным вырезом 88.
Наконец, передняя стенка 21 имеет изолированный вырез 82, выполненный между двумя участками 80, соединяющими деформирующуюся область 76 с остальной частью передней стенки 21. Этот изолированный вырез 82 облегчает формирование шарнира на уровне участков 82 и, следовательно, деформацию деформирующейся области 76.
Таким образом, вышеупомянутые вырезы и отверстия позволяют получить в передней стенке 21 корпуса:
- первый деформирующийся язычок 24;
- второй деформирующийся язычок 26;
- третий деформирующийся язычок 28.
Таким образом, первый, второй и третий деформирующиеся язычка 24, 26, 28 попарно расположены параллельно и на расстоянии друг от друга.
В частности, если для каждого деформирующегося язычка 24, 26, 28 определить центральную ось (или ось протяженности), проходящую между зоной соединения соответствующего деформирующегося язычка 24, 26, 28 с деформирующейся областью 76 и свободным концевым краем соответствующего деформирующегося язычка 24, 26, 28, то деформирующиеся язычки 24, 26, 28 имеют (попарно) параллельные и отстоящие друг от друга центральные оси.
Когда пользователь действует усилием на верхнюю часть приводного пальца 4, ребра 54, 56 жесткости приводного пальца 4 перемещают соответствующие деформирующиеся язычки 24, 28 назад (то есть внутрь корпуса или в сторону печатной схемы 16), что приводит к деформации деформирующейся области 76 в этом же направлении и одновременно к перемещению деформирующегося язычка 26 назад, то есть к его вхождению в контакт с микропереключателем 36 (в данном случае при помощи выступа 74).
Когда создаваемое пользователем движение продолжается в заднем направлении, деформирующиеся язычки 24, 28 деформируются, вызывая (через деформирующуюся область 76) деформацию деформирующегося язычка 26, достаточную, чтобы привести в действие микропереключатель 36.
Использование (по меньшей мере) язычка 24, 28, деформирующегося под действием приводного пальца 4, и отдельного язычка 26 для приведения в действие переключателя (в данном случае микропереключателя 36) позволяет получить гибкую связь между движением приводного пальца 4 и приведением в действие переключателя 36, в частности, за счет формы деформирующейся области 76 и деформирующихся язычков 24, 26, 28.
В частности, это дает возможность более свободно выбирать перемещение приводного пальца 4 и соответствующее усилие, необходимые для срабатывания переключателя 36. Точно так же, в зависимости от движения язычка 26, получаемого при данном перемещении приводного пальца 4, можно выбирать между резким срабатыванием переключателя 36 и его более плавным срабатыванием.
Таким образом, выбирая форму деформирующейся области 76 и деформирующихся язычков 24, 26, 28 (то есть используя форму вышеупомянутых вырезов 82, 84, 86, 88 и отверстий 90, 92), в частности, промежуток между центральными осями двух соседних деформирующихся язычков 24, 26, 28, можно изменять ощущение пользователя, когда он перемещает приводной палец (в частности, его тактильное ощущение, а также, возможно, его слуховое ощущение, например, при резком или плавном срабатывании переключателя 36).
Кроме того, использование (по меньшей мере) язычка 24, 28, деформирующегося под действием приводного пальца 4, и отдельного язычка 26 для приведения в действие переключателя (в данном случае микропереключателя 36) позволяет избегать передачи усилия, создаваемого пользователем, напрямую на переключатель 36, чтобы не допустить его повреждения.
Использование (по меньшей мере) язычка 24, 28, деформирующегося под действием приводного пальца 4, и отдельного язычка 26 для приведения в действие переключателя (в данном случае микропереключателя 36) позволяет также определять ощущение пользователя среди более широких возможностей, в частности, меняя (на центральной оси соответствующего язычка) точку контакта ребер 54, 56 жесткости с соответствующим язычком 24, 28 и/или точку язычка 26, приводящую в действие (через выступ 74) переключатель 36.
Передняя стенка 21 имеет другую деформирующуюся область 94, от которой отходят деформирующиеся язычки 30, 32, 34.
Как показано на фиг. 2, деформирующаяся область 84 и деформирующиеся язычки 30, 32, 34 выполнены симметрично с деформирующейся областью 76 и с деформирующимися язычками 24, 26, 28. Что касается выполнения и работы деформирующейся области 84 и деформирующихся язычков 30, 32, 34, можно обратиться к представленному выше описанию.
Таким образом, вырезы и отверстия, выполненные в нижней части передней стенки 21, позволяют получить:
- четвертый деформирующийся язычок 30;
- пятый деформирующийся язычок 32;
- шестой деформирующийся язычок 34.
Таким образом, четвертый, пятый и шестой деформирующиеся язычки 30, 32, 34 расположены попарно параллельно и на расстоянии друг от друга.
В частности, если для каждого деформирующегося язычка 30, 32, 34 определить центральную ось (или ось протяженности), проходящую между зоной соединения соответствующего деформирующегося язычка 30, 32, 34 с деформирующейся областью 94 и свободным концевым краем соответствующего деформирующегося язычка 30, 32, 34, то деформирующиеся язычки 30, 32, 34 имеют (попарно) параллельные и отстоящие друг от друга центральные оси.
Когда пользователь действует усилием на нижнюю часть приводного пальца 4 (возможно, одновременно с описанным выше усилием на верхнюю часть), ребра 58, 60 жесткости приводного пальца 4 перемещают соответствующие деформирующиеся язычки 30, 34 назад (то есть внутрь корпуса или в сторону печатной схемы 16), что приводит к деформации деформирующейся области 94 в этом же направлении и одновременно к перемещению деформирующегося язычка 32 назад, то есть к его вхождению в контакт с микропереключателем 38.
Если движение нижней части приводного пальца 4 под действием пользователя продолжается в заднем направлении, деформирующиеся язычки 30, 34 деформируются, вызывая (через деформирующуюся область 94) деформацию деформирующегося язычка 32, достаточную, чтобы привести в действие микропереключатель 38.
Таким образом, пользователь может управлять приведением в действие микропереключателя 36 или микропереключателя 38 или обоих этих микропереключателей 36, 38 в зависимости от усилия, которым он действует на приводной палец 4.
В описанных выше примерах и, как показано на фиг. 2, для приведения в действие переключателя 36; 38 используют два деформирующихся язычка 24, 28; 30, 34, каждый из которых перемещается ребром 54, 56; 58, 60 жесткости приводного пальца 4 и которые находятся с двух сторон от деформирующегося язычка 26; 32.
Эта конструкция обеспечивает хороший контроль перемещения деформирующегося язычка 26; 32, который приводит в действие переключатель 36; 38. В частности, деформирующийся язычок 26; 32 деформируется вдоль оси приведения в действие переключателя 36; 38.
Вместе с тем, в варианте можно предусмотреть деформирующуюся область, от которой отходит единственный первый деформирующихся язычок, входящий в контакт с приводным пальцем, и второй деформирующийся язычок, приводящий в действие переключатель. Действительно, в этом случае деформация первого язычка тоже приводит к деформации деформирующейся области, что влечет за собой деформацию второго деформирующегося язычка для приведения в действие переключателя, как было указано выше.
Кроме того, хотя в представленном примере рабочий механизм 8 содержит только один приводной палец 4, в варианте можно предусмотреть несколько приводных пальцев 4, выполненных в передней стенке рабочего механизма 8, при этом рабочий механизм 8 выполнен, как было указано выше (и показано на фигурах), напротив каждого из используемых приводных пальцев.
Изобретение относится к устройству управления, содержащему корпус (12, 14), в котором находится по меньшей мере один переключатель (36), и приводной палец, подвижный относительно корпуса (12, 14) и имеющий на стороне приводного пальца, обращенной к корпусу (12, 14), по меньшей мере один выступающий элемент. Корпус (12, 14) содержит деформирующуюся область (76), от которой отходят первый язычок (24), выполненный с возможностью взаимодействия с указанным элементом по меньшей мере в одном положении приводного пальца, и второй язычок (26) для приведения в действие переключателя (36). Техническим результатом является ограничение рисков повреждения переключателя. 13 з.п. ф-лы, 10 ил.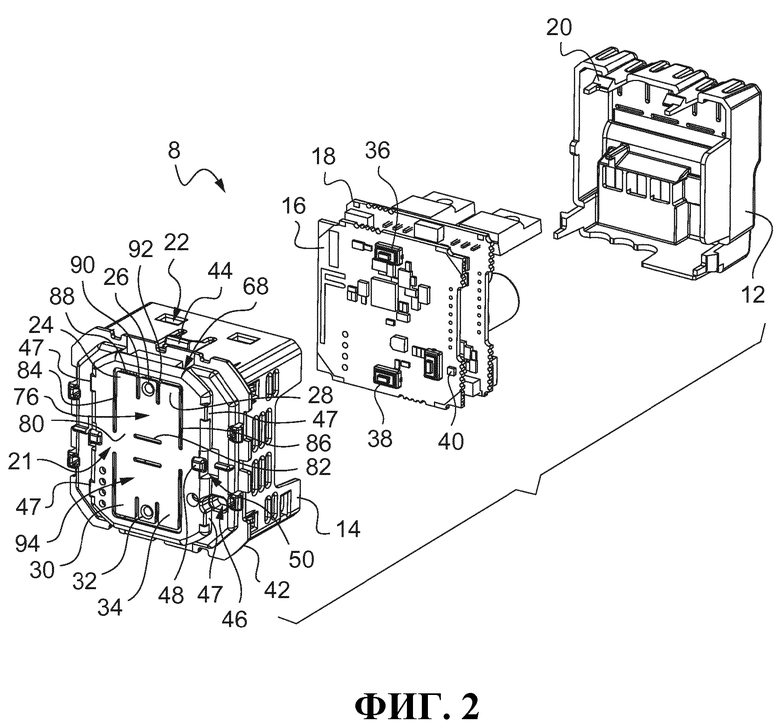
1. Устройство управления, содержащее:
- корпус (12, 14), в котором находится по меньшей мере один переключатель (36), и
- приводной палец (4), подвижный относительно корпуса (12, 14) и имеющий на стороне (55) приводного пальца (4), обращенной к корпусу (12, 14), по меньшей мере один выступающий элемент (54),
отличающееся тем, что корпус (12, 14) содержит деформирующуюся область (76), от которой отходят первый язычок (24), выполненный с возможностью взаимодействия с указанным элементом (54) по меньшей мере в одном положении приводного пальца (4), и второй язычок (26) для приведения в действие переключателя (36).
2. Устройство управления по п. 1, в котором первый язычок (24) и второй язычок (26) расположены параллельно друг другу и на расстоянии друг от друга.
3. Устройство управления по п. 1 или 2, в котором приводной палец (4) содержит другой выступающий элемент (56), при этом от деформирующейся области (76) отходит третий язычок (28), располагаясь напротив указанного другого элемента (56).
4. Устройство управления по п. 3, в котором первый язычок (24) и третий язычок (28) расположены с двух сторон от второго язычка (26).
5. Устройство управления по одному из пп. 1-4, в котором первый язычок (24) и второй язычок (26) являются деформирующимися.
6. Устройство управления по одному из пп. 1-5, в котором приводной палец (4) содержит лапку (66), заходящую в выемку (68) корпуса (12, 14) и имеющую первую контактную поверхность (70), обращенную к указанной стороне (55) приводного пальца (4), при этом первый язычок (24) является упругим и входит в контакт с указанным элементом (54), прижимая первую контактную поверхность (70) ко второй контактной поверхности (72), выполненной на корпусе (12, 14) и ограничивающей указанную выемку (68).
7. Устройство управления по одному из пп. 1-6, в котором деформирующаяся область (76), первый язычок (24) и второй язычок (26) выполнены в передней стенке (21) корпуса (12, 14).
8. Устройство управления по п. 7, в котором приводной палец (4) содержит бортик (64), проходящий по периферии приводного пальца (4) и окружающий указанную переднюю стенку (21).
9. Устройство управления по одному из пп. 1-8, в котором переключатель (36) находится на печатной схеме (16), установленной в корпусе (12, 14).
10. Устройство управления по одному из пп. 1-9, в котором переключатель является микропереключателем (36).
11. Устройство управления по одному из пп. 1-10, в котором второй деформирующийся язычок (26) имеет выступ (74), обращенный к переключателю (36).
12. Устройство управления по одному из пп. 1-11, в котором деформирующаяся область (76) частично ограничена множеством вырезов (82, 84, 86).
13. Устройство управления по одному из пп. 1-12, в котором указанная сторона (55) приводного пальца (4) содержит дополнительный выступающий элемент (58), при этом корпус (12, 14) содержит другую деформирующуюся область (94), от которой отходит четвертый язычок (30), выполненный с возможностью взаимодействия с указанным дополнительным элементом (58), и пятый язычок (32) для приведения в действие другого переключателя (38).
14. Устройство управления по одному из пп. 1-13, в котором корпус (12, 14) содержит по меньшей мере один штифт (48), частично окруженный выемкой (50), при этом указанная сторона (55) приводного пальца (4) содержит установочное ребро (52) жесткости, заходящее в указанную выемку (50).
| DE 202004005837 U1, 08.07.2004 | |||
| КЛАВИШНЫЙ ПЕРЕКЛЮЧАТЕЛЬ | 0 |
|
SU264491A1 |
| Переключающее устройство | 1976 |
|
SU604042A1 |
| КЛАВИШНЫЙ ПЕРЕКЛЮЧАТЕЛЬ | 0 |
|
SU318078A1 |
| EP 1619704 A1, 25.01.2006 | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| DE 202011109300 U1, 21.03.2013 | |||
| CN 105336520 A, 17.02.2016. | |||

