Область техники
Изобретение относится к нефтегазовой области и может быть использовано для прогнозирования прихватов колонны бурильных труб в процессе бурения нефтяных и газовых скважин с использованием нейросетевой модели.
Уровень техники
Бурение скважин для разведки и разработки новых месторождений, а также добычи углеводородных ресурсов всегда было и остается чрезвычайно капиталоемким для нефтегазодобывающих организаций. Получение высоких технико-экономических показателей бурения во многом зависит от успешности преодоления осложнений и аварий. При этом риск возникновения аварий в современных условиях бурения нефтяных и газовых скважин (разнообразие геологического строения районов, глубина скважин, высокие давления, температура и солевая агрессия, наличие неустойчивых пород, сложность конструкций и конфигураций скважин) очень высок.
Наиболее распространенным и трудоемким видом аварий в процессе бурения скважин является прихват бурильной колонны, поэтому способам прогнозирования и идентификаций прихватов колонн бурильных труб отводится первостепенная роль.
Прихват - это непредвиденный процесс при сооружении скважин, характеризующийся потерей подвижности колонны труб или скважинных приборов при приложении к ним максимально допустимых нагрузок с учетом запаса прочности труб и применяемого оборудования. По механизму возникновения, прихваты можно разделить на три группы: а) дифференциальный прихват (под действием перепада давления); б) прихват вследствие геометрических изменений ствола скважины; в) прихват вследствие зашламования или закупоривания кольцевого пространства твердыми частицами (в результате оседания шлама, утяжелителя, осыпей, обвалов, выпучивания пород, сальникообразования и т.п.).
Прихват можно предотвратить, если по ранним признакам правильно идентифицировать начало возникновения того или иного вида прихватов и предпринимать своевременные меры, которые в нефтегазовом деле принято называть «предупреждением прихватов». Существует набор методов по предупреждению прихватов, которые обеспечивают безопасность и не требуют больших трудовых или материальных затрат. Однако своевременное обнаружение ранних признаков проявления прихватов - является сложной задачей, поскольку одни и те же признаки в разных ситуациях, условиях и операциях могут интерпретироваться по-разному. Корректная интерпретация признаков прихватов затруднительна без учета большого набора влияющих факторов, что в полевых условиях в настоящее время не всегда возможно. Таким образом, разработка способов прогнозирования и диагностирования прихватов, учитывающих большую часть влияющих факторов, позволит минимизировать вероятность ошибочной интерпретации признаков и своевременно обнаруживать прихваты. В результате, способ прогнозирования и распознавания прихватов позволяет сократить экономические издержки и повысить технико-технологические показатели процесса бурения скважины за счет сокращения времени на ликвидацию прихват.
Из уровня техники известен способ прогнозирования прихвата колонны бурильных труб (патент US5181172A, МПК G06F 15/20, E21B 44/00, опубл. 19.01.1993 г.), включающий в себя аналитическую шаговую оценку отношения силы осевого напряжения сдвига колонны бурильных труб к глубине нахождения долота (именуемое в работе, как показатель степени тяжести ствола скважины), с последующим определением скорости приращения этого показателя относительно изменения глубины нахождения долота.
Недостатком данного способа является то, что для проведения полной процедуры прогнозирования необходимо остановить процесс бурения скважины на некоторое время (для определений силы осевого напряжения сдвига), что сильно увеличивает непродуктивную трату времени. Повышение непродуктивной траты времени снижает технологическую производительность процесса бурения скважины.
Известен способ прогнозирования прихватов колонны бурильных труб (патент WO2013/066746 A1 и US8752648B2, МПК E21B 44/02, E21B 47/13, E21B 17/01, опубл. 10.05.2013г., а также патент US20140110167A1, МПК E21B 41/00, E21B 44/00, G06N 3/08, G06N 99/00, опубл. 24.04.2014 г.), включающий в себя получение в компьютерной системе множества статических и динамических параметров бурения, таких как диаметр долота, диаметр скважины, вес технологического инструмента (нагрузка на крюке), частота вращения технологического инструмента, крутящий момент на валу ротора или забойного двигателя, давления закачки бурового раствора, давления на стояке бурового насоса, давления бурового раствора при выходе из скважины, нагрузка на долото, частота вращения долота, угол наклона скважины, пористость и проницаемость пласта, и с помощью ансамблей моделей машинного обучения прогнозирование значения вероятности и времени наступления прихват. Ансамбль моделей состоит из нейронной сети, дерева решений, метода опорных векторов и байесовского метода.
Недостатком данного способа прогнозирования прихвата является то, что среди множества показателей параметров бурения не учитываются реологические и технологические параметры бурового раствора, которые являются важными факторами, влияющими на процесс возникновений прихвата.
Известен способ прогнозирования рисков возникновения прихвата колонны бурильных труб в режиме реального времени (в процессе бурения скважины) (патент US9582764B2, МПК G06G 7/48, G06N 5/04, G06N 99/00, E21B 41/00, опубл. 28.02.2017 г.), включающий в себя получение в компьютерной системе множества параметров и режимов бурения, с последующей обработкой на двух аналитических моделей (именуемое в работе как модель грубого слоя прогнозирования и модель тонкого слоя прогнозирования). В работе применяются методы сегментации данных с применением скользящего окна, а также с применением не пересекающего окна.
Недостатком данного способа прогнозирования рисков возникновения прихватов является то, что в качество входной информации не используются такие параметры как диаметр долота, геометрические характеристики компоновки низа бурильной колоны, расход промывочной жидкости, реологические и технологические свойства и параметры бурового раствора, интервал открытого (не обсаженного) ствола скважины, что являются самыми важными факторами (признаками) по котором определят степень риска (угрозы) возникновения прихватов.
Известен способ прогнозирования прихвата бурильных труб (патент US20170306726 A1, МПК E21B 41/00, E21B 47/00, E21B 47/09, G06G 17/50, опубл. 26.10.2017 г.), включающий в себя считывание показания веса технологического инструмента (нагрузку на крюке) и глубины нахождения долота, с последующим сравниванием со значением прогнозируемого показателя адаптивной и линейной регрессионной моделей. Если значение веса технологического инструмента будет выше, чем прогнозируемое (номинальное) значение той же глубины нахождения долота, тогда формируется предупреждение о высокой вероятности возникновения прихвата.
Недостатком данного способа прогнозирования прихвата является то, что прогноз строится только по показаниям веса технологического инструмента и глубины нахождения долота, не учитываются важные показатели параметров бурения, в том числе реологические и технологические параметры бурового раствора, которые являются важными факторами, влияющими на процесс возникновений прихвата; для построения правильного прогноза необходимо через 100 метров наращивания инструмента устанавливать пороговое значение веса технологического инструмента, исходя из анализа среднего показателя веса инструмента, что без участия персонала невозможно выполнить.
Известен способ прогнозирования прихвата бурильных труб (патент US 10513920B2 и WO 2016/205493Al, МПК E21B 44/00, E21B 47/12, E21B 7/00, E21B 7/28, E21B 19/00, опубл. 24.12.2019 г.) - прототип, включающий в себя выделение значения параметров режимов бурения, которые являются косвенными признаками технического состояния колоны бурильных труб, с последующим расчетом показателя приращения этих параметров и сопоставление с эталонными значениями этих параметров. Когда текущие значения параметров превосходят предел эталонных значений, формируется предупреждение о риске возникновения прихвата. Способ применяется во всех операциях процесса бурения скважины (спуск, подъем, проработка, промывка, бурения).
Недостаток данного способа состоит в том, что результаты прогноза могут быть ошибочными, так как модель имеет высокую чувствительность к зашумленным данным; из приведенных примеров (в способе) прогнозирования прихватов видно, что прихват прогнозирован за тот период времени, когда уже наступил прихват, следовательно, способ больше относиться к обнаружению (идентификации), чем к прогнозированию прихвата, так как интервал времени прогнозирования до прихвата очень короткий.
Техническая задача изобретения направлена на создание модели искусственной нейронной сети для прогнозирования прихвата колонны бурильных труб в процессе бурения скважины в режиме реального времени.
Технический результат изобретения - повышение достоверности прогнозирования и диагностирования состояния колонны бурильных труб на риск возникновении прихватов.
Раскрытие изобретения
Технический результат достигается тем, что способ прогнозирования прихватов бурильных труб в процессе бурения скважины (в режиме реального времени), характеризуется тем, что:
- из множества считываемых, измеряемых параметров и режимы бурения со станции геолого-технологических исследований (далее ГТИ), а также измеряемых и определяемых параметров с процесса бурения скважины, создают перечень входных признаков Хij для прогнозирования прихватов;
- создают набор данных о прихватах из записей ранее пробуренных скважин;
- размечают, маркируют, сегментируют образцы набора данных о прихватах по предприхватным признакам;
- проводят процедуру нормализаций значений набора данных о прихватах, с последующей разделения набора данных на мини-наборы;
- на основе перечня входных признаков Xij (считываемых, измеряемых параметров и режимы бурения со станции ГТИ, а также измеряемых и определяемых параметров с процесса бурения скважины), определяют параметры скользящего окна;
- на базе искусственной нейронной сети создают модель прогнозирования прихватов;
- проводят процедуру обучения модели прогнозирования по тренировочным и проверочным мини-наборам данных;
- тестируют обученную модель на тестовом мини-наборе данных;
- осуществляют оценку качества работы модели на полном наборе данных методом k-блочной кросс-валидации;
- осуществляют процедуру прогнозирования прихватов колонны бурильных труб с помощью обученной модели нейронной сети, и получают результаты прогнозных значений, показывающих вероятность возникновения прихватов в процессе бурения скважины, следующим путем: считывают (измеряют, рассчитывают, выбирают и определяют) параметры и режимы бурения со станции ГТИ, а также измеряют и определяют параметры с процесса бурения скважины для прогнозируемой (бурящийся) скважины; далее сравнивают значение таких параметров как: Х23 - длины не обсаженной части или открытого участка ствола скважины и Х24 - длины технологического инструмента, находящегося в зоне открытого ствола, если они (Х23 и Х24) меньше нуля, то цикл замыкается с позицией считывание параметров и режимов до тех пор, пока значения Х23 и Х24 не станут больше нуля. Если значения Х23 и Х24 больше нуля, то производят нормализацию значения полученных параметров и режимов (элементов входных данных) и передают нормализованные значение параметров и режимов в модель прогнозирования, которая, в свою очередь, выдает прогноз на прихват: если модель прогнозирует отсутствие прихвата, то на этом завершается процедура прогнозирования для имеющихся входных данных в момент времени t+m; если модель прогнозирует прихват, тогда необходимо скорректировать значения параметров и режимов бурения для имеющихся входных данных в момент времени t+m, и повторять процедуру прогнозирования для входных данных со смешенным окном прогнозирования на временной шаг t+m до тех пор, пока не достигается отрицательного прогноза на прихват.
Сущность изобретения поясняется следующими графическими материалами, где:
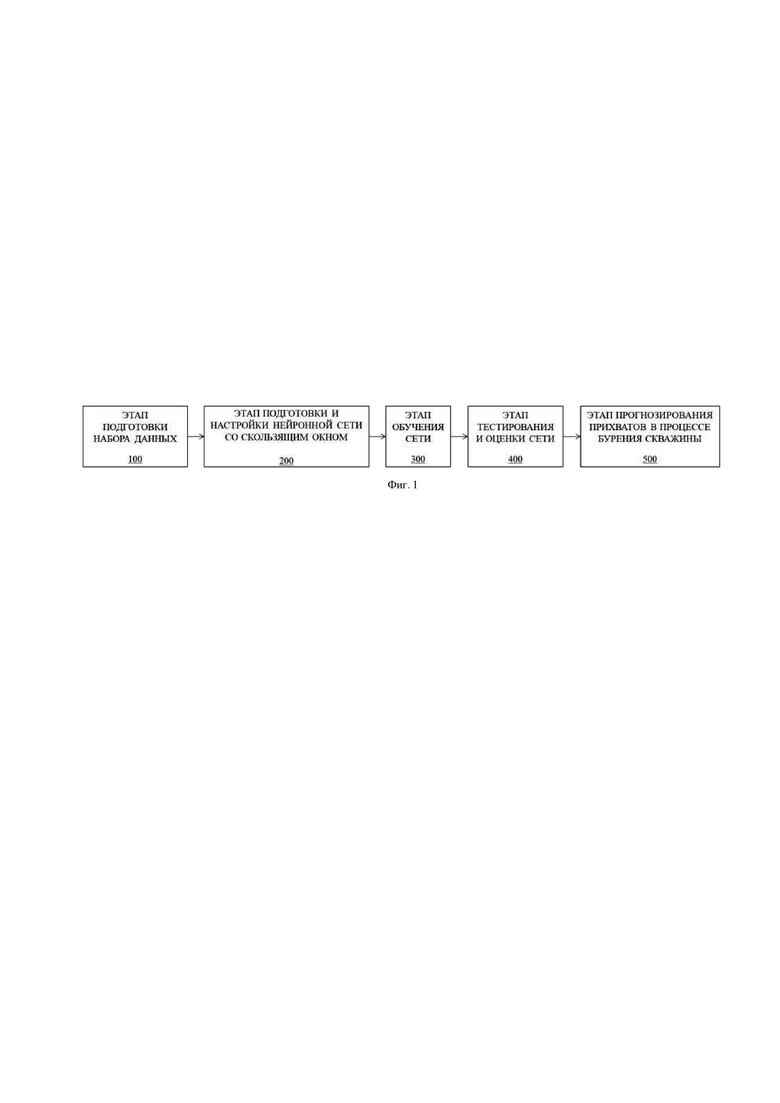
Фиг. 1 - Блок-схема последовательности этапов реализации способа, где позициями обозначено: 100 - этап подготовки набора данных; 200 - этап подготовки и настройки нейронной сети со скользящим окном; 300 - этап обучения сети; 400 - этап тестирования и оценки сети; 500 - этап прогнозирование прихватов в процессе бурения скважины.
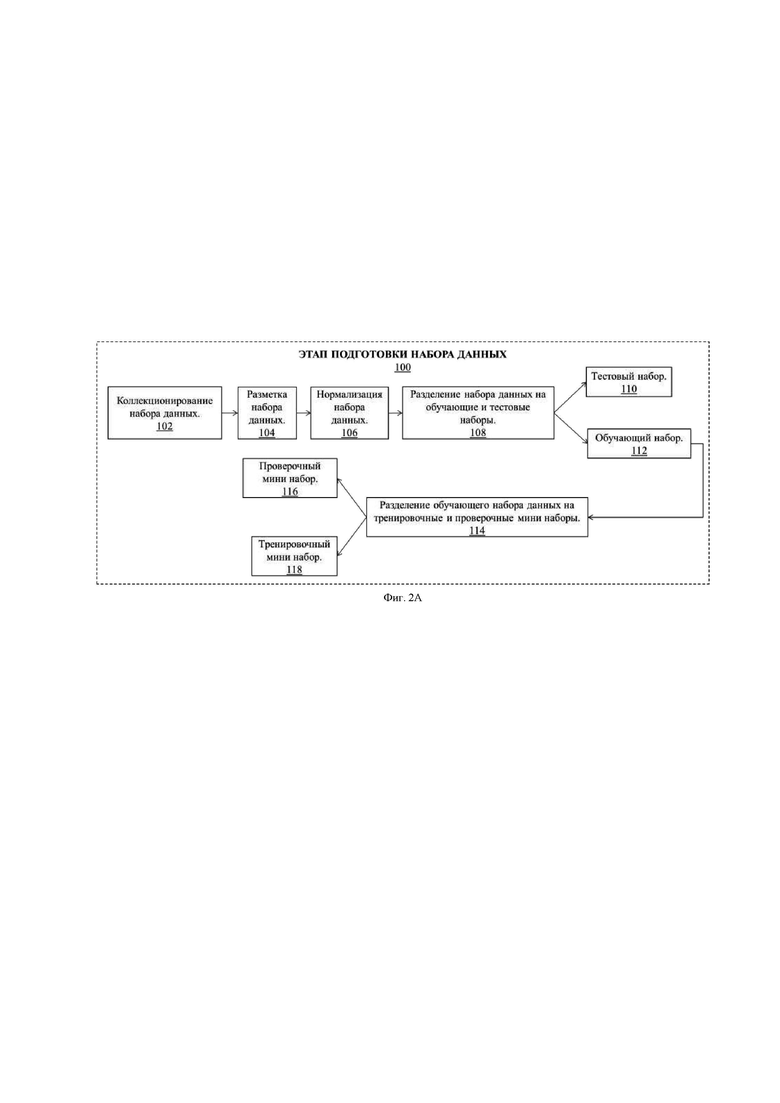
Фиг. 2А - Блок-схема последовательности шагов подготовки набора данных;
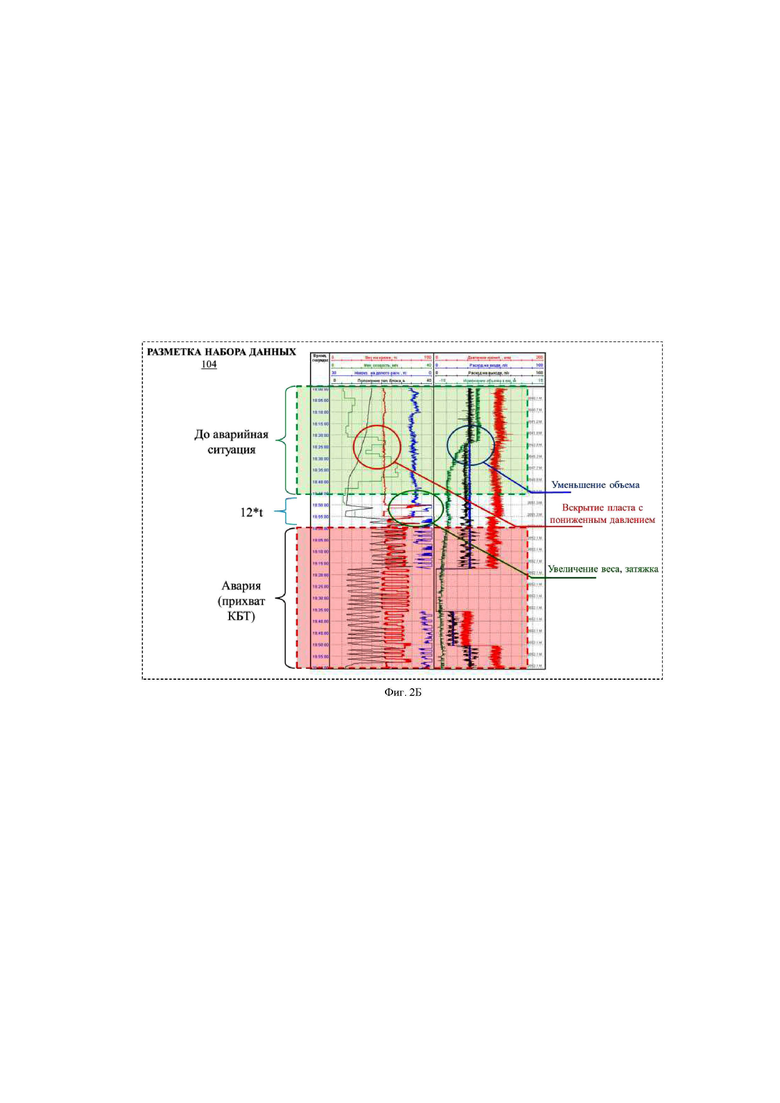
Фиг. 2Б - Иллюстрация разметки набора данных (выделение предприхватной ситуации для присвоения целевой перемены);
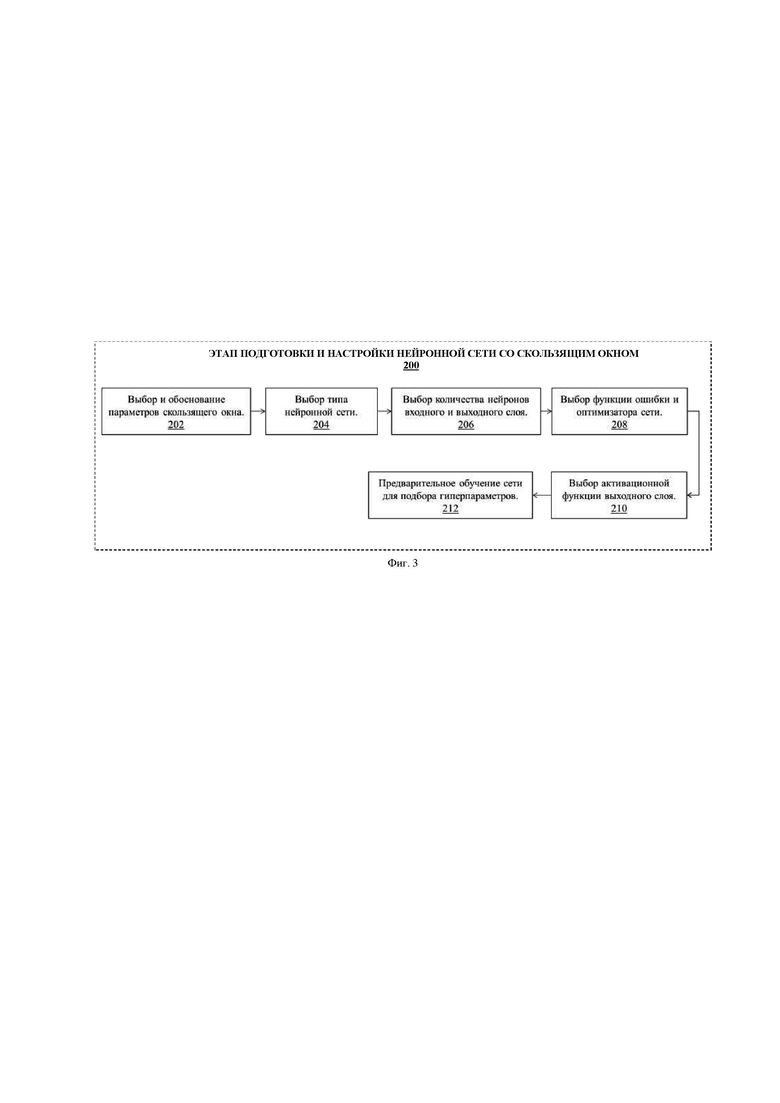
Фиг. 3 - Блок-схема последовательности шагов подготовки и настройки нейронной сети со скользящим окном;
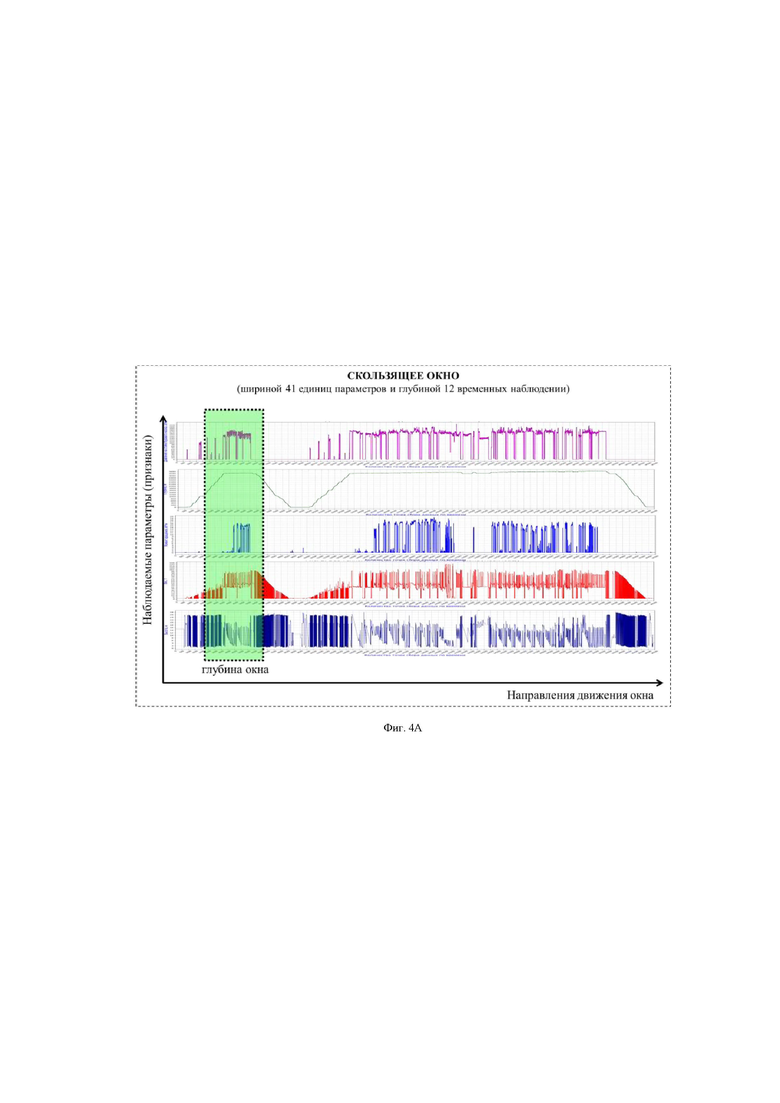
Фиг. 4А - Иллюстрация работы алгоритма скользящего окна;
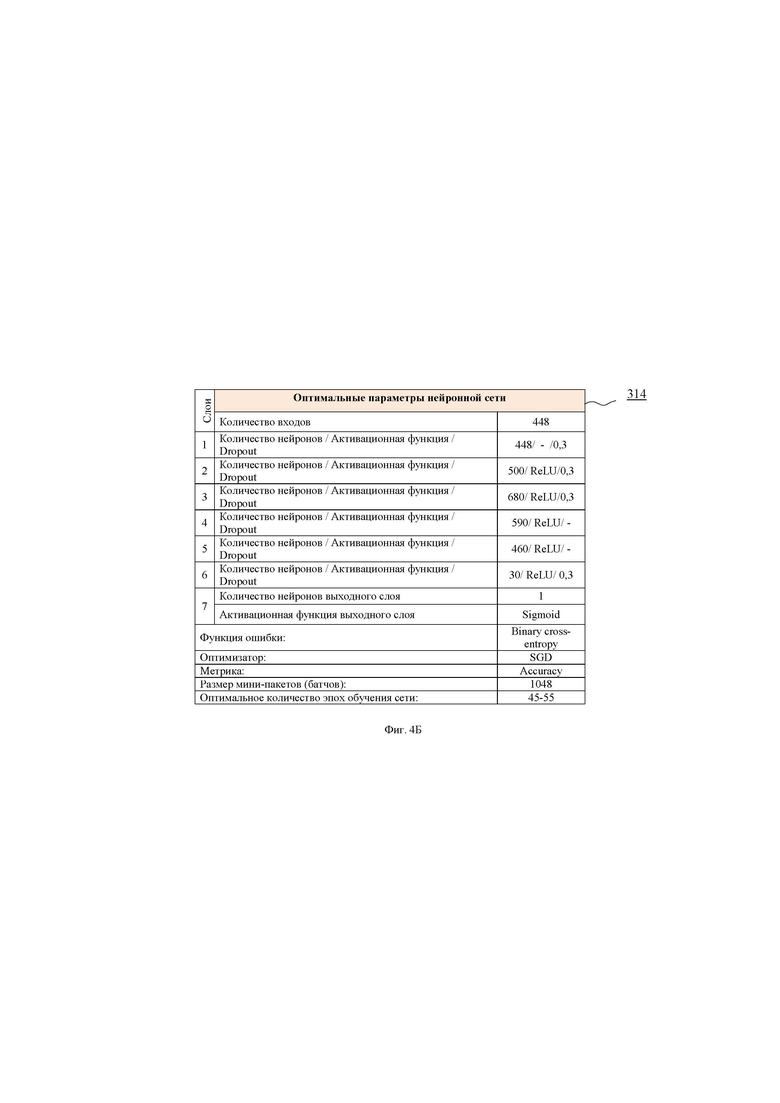
Фиг. 4Б - Основные параметры, настройки и характеристики модели нейронной сети;
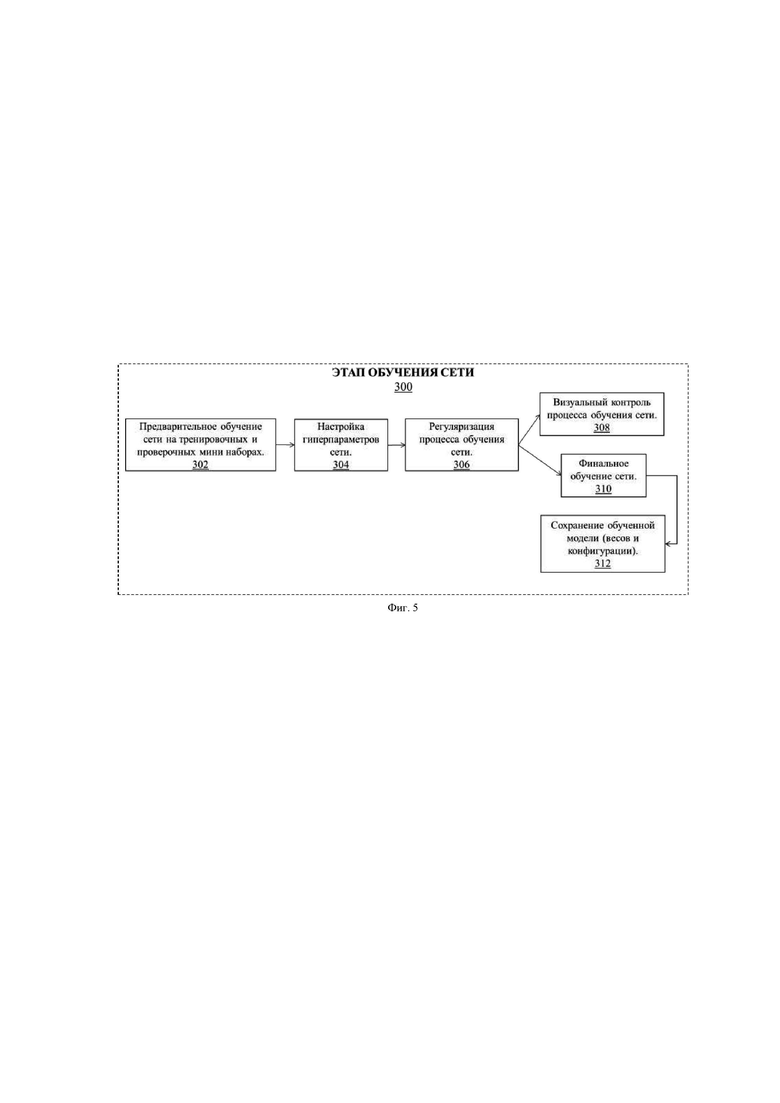
Фиг. 5 - Блок-схема последовательности шагов обучения сети (методом обратного распространение ошибки);
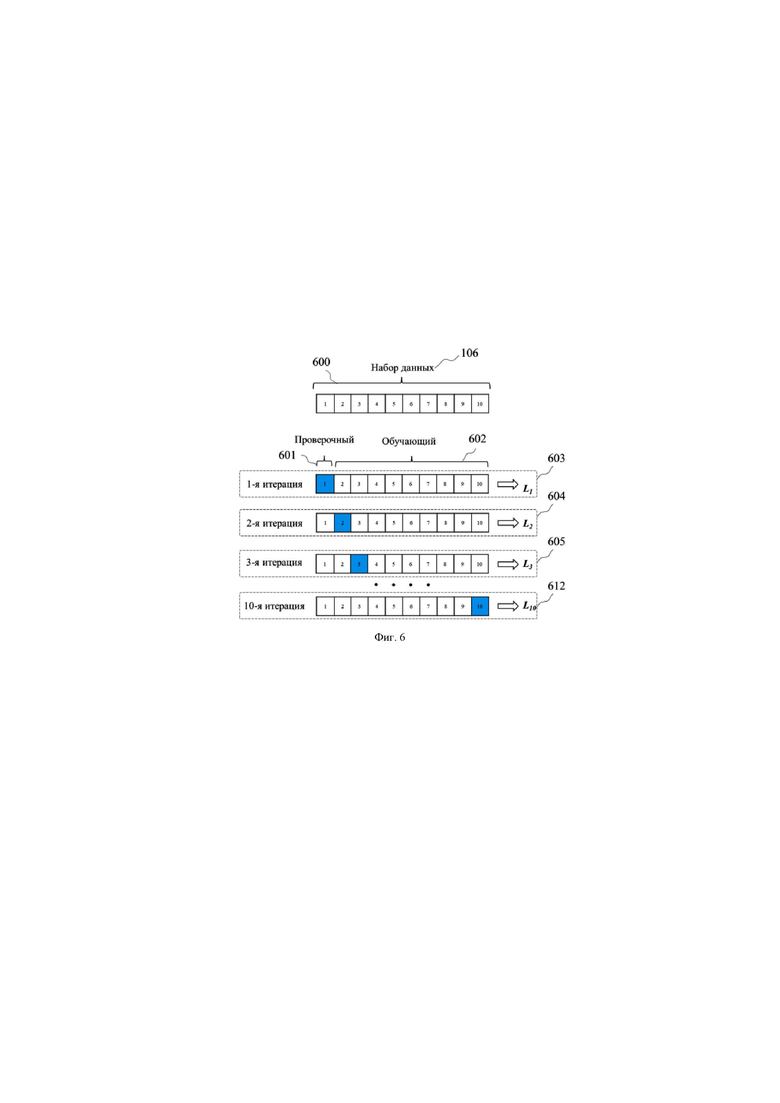
Фиг. 6 - Схема процедуры оценки качество работы модели методом k-блочной кросс-валидации;
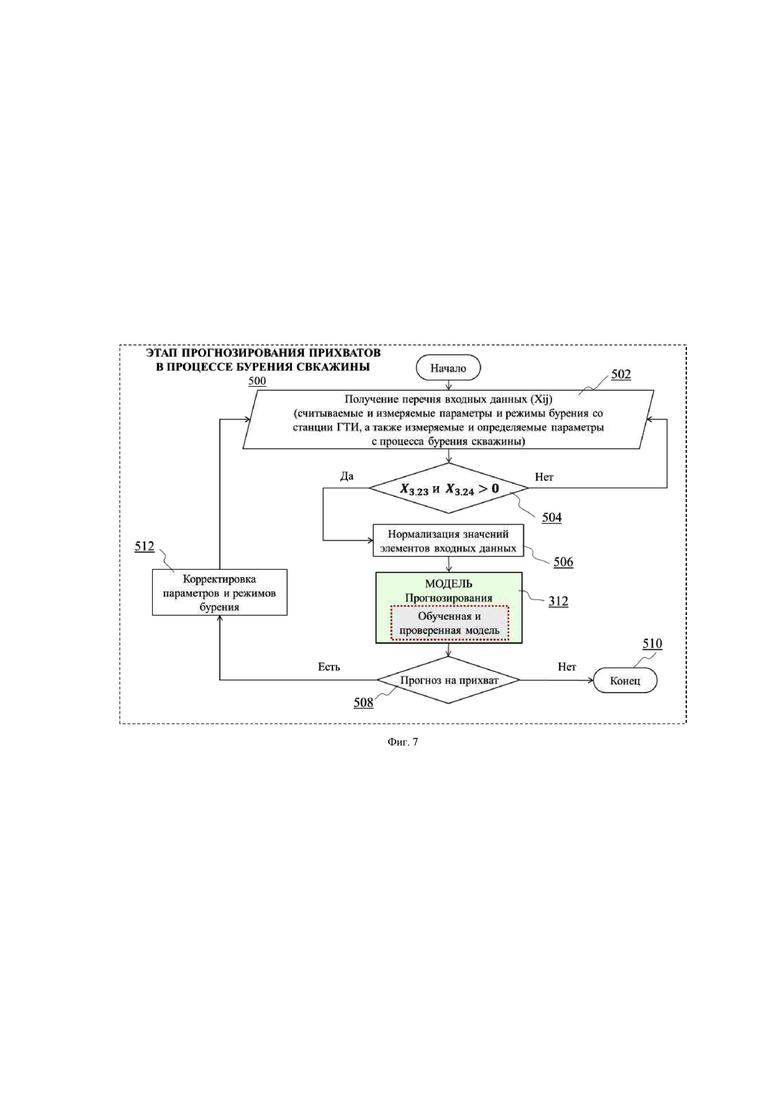
Фиг. 7 - Алгоритмическая блок-схема процедуры прогнозирования прихватов в процессе бурения скважины;
Способ осуществляется по следующей последовательности и в нескольких этапах (100, 200, 300, 400 и 500, Фиг. 1).
ЭТАП ПОДГОТОВКИ НАБОРА ДАННЫХ (100, Фиг. 1 и Фиг. 2А).
Коллекционирование набора данных (102, Фиг. 2А). Современные буровые установки для сбора информации и мониторинга процессов в режиме реального времени, оснащены автоматизированными станциями геолого-технологических исследований (ГТИ). Такие станции позволяют не только сопровождать и контролировать все параметры, режимы и процессы, но и заблаговременно сигнализировать об отклонениях каких-либо параметров. Процессом сопровождения бурения скважин занимаются службы ГТИ и геофизических исследований скважин (ГИС).
ГТИ являются составной частью геофизических исследований нефтяных и газовых скважин, и предназначены для осуществления контроля за состоянием скважины на всех этапах ее строительства и ввода в эксплуатацию с целью изучения геологического разреза, достижения высоких технико-экономических показателей бурения.
ГТИ проводятся непосредственно в процессе бурения скважины и решают комплекс геологических и технологических задач, направленных на оперативное выделение в разрезе бурящейся скважины перспективных на нефть и газ пластов-коллекторов, изучение их фильтрационно-емкостных свойств и характера насыщения, обеспечение безаварийной проводки скважин и оптимизацию режима бурения.
В предлагаемом способе, предусмотрено использовать записи журналов ГТИ, которые содержать записи показания множество параметров и режимов бурения. А также использовать дополнительные источники данных, такие как журнал буровых растворов (лабораторный журнал), фактический записи геолого-технического наряда (ГТН). Сбор данных предусматривается по следующему далее перечню элементов (признаков) набора данных. Элементами набора данных составляют такие параметры и режимы (P) как: X1.1 - Детальный механический каротаж [мин/м]; X1.2 - Механическая скорость бурения [м/ч]; X1.3 - Скорость бурения [м/ч]; X1.4 - Суммарное содержание газов в растворе [%]; X2.1 - Температура бурового раствора на входе скважины [°C]; X2.2 - Температура бурового раствора на выходе из скважины [°C]; X2.3 - Плотность бурового раствора на входе скважины [г/см3]; X2.4 - Плотность бурового раствора на выходе из скважины [г/см3]; X2.5 - Условная вязкость [с]; X2.6 - Пластическая вязкость [Па·с]; X2.7 - Статическое напряжение сдвига бурового раствора (при одной минуты в покое СНС1), [мгс/см2]; X2.8 - Статическое напряжение сдвига бурового раствора (при 10 минут в покое СНС10), [мгс/см2]; X2.9 - Водоотдача за 30 мин. [см3]; X2.10 - Толщина фильтрационной корки [мм]; X2.11 - Содержание смазывающего вещества (нефти) в буровом растворе [%]; X2.12 - Содержание песка (твердых частиц) [%]; X2.13 - Водородный показатель «pH» [1÷14]; X3.1 - Диаметры долота [мм]; X3.2 - Длина компоновки низа бурильной колоны [м]; X3.3 - Наружный диаметр максимальной части компоновки низа бурильной колоны [мм]; X3.4 - Частота вращения долота (забойного двигателя, ротора); X3.5 - Глубина нахождения забоя скважины [м]; X3.6 - Угол наклона (искривления) ствола скважины [ ° ]; X3.7 - Глубина нахождения инструмента (долота) [м]; X3.8 - Положение талевого блока [м]; X3.9 - Вес технологического инструмента (Вес на крюке) [kH]; X3.10 - Нагрузка на долото [kH]; X3.11 - Скручивающие и осевые нагрузки на бурильную колонну [kH·м]; X3.12 - Давление на стояке бурового насоса [kПа, атм]; X3.13 - Ход поршня бурового насоса №1 [м]; X3.14 - Ход поршня бурового насоса №2 [м]; X3.15 - Ход поршня бурового насоса №3 [м]; X3.16 - Расход бурового раствора на входе скважины (Q1) [лит./с]; X3.17 - Расход бурового раствора на выходе из скважины (Q2) [лит./с]; X3.18 - Уровень бурового раствора в емкости №3 [м]; X3.19 - Уровень бурового раствора в емкости №4 [м]; X3.20 - Объем бурового раствора в емкости №3 [м3]; X3.21 - Объем бурового раствора в емкости №4 [м3]; X3.22 - Суммарный объем бурового раствора в активных емкостях [м3]; X3.23 - Длина не обсаженной части или открытого участка ствола скважины (Lo.stv) [м]; X3.24 - Длина технологического инструмента находящий в зоне открытого ствола (Ldolvostv) [м].
По характеру описаний, элементы набора данных, условно разделяются на:
- косвенно-геомеханические параметры горных пород (X1.1 - X1.4);
- технологические и реологические параметры и свойства бурового раствора (X2.1 - X2.13);
- технико-технологические параметры и режимы бурения (X3.1 - X3.24).
А также по характеру изменчивости по времени (в процессе бурения скважины), элементы набора данных разделаются на Pstat - статические (X3.1, X3.2, X3.3, X3.4) и Pdin - динамические (X1.1 - X1.4, X2.1 - X2.13, X3.5 - X3.24) параметры и режимы.
Для увеличения репрезентативности признаков, по которым оперативно можно идентифицировать прихваты), нами были рассчитаны и введены такие признаки как (X3.23) Lo.stv - длина не обсаженной части или открытого участка ствола скважины, и (X3.24)
Ldolvostv - длина технологического инструмента, находящегося в зоне открытого ствола, которые определяется выражениями:


при условии, что

Если  или
или  , тогда
, тогда  Где
Где  глубина нахождения башмака обсаженной колонны.
глубина нахождения башмака обсаженной колонны.
Разметка набора данных (104, Фиг. 2А). Одним из важном этапом подготовки данных, является этап разметки или маркировки данных. Применительно для решаемой задачи, под разметкой и маркировкой набора данных подразумевается процедура присвоение целевой перемены Y к комбинациям значений входных признаков (параметров и режимов) на временном интервале t+0 до t+m.
По результатам тщательного анализа множество материалов и производственных данных о прихватах (диаграмм, актов, геолого-технических нарядов, ежесуточных сводок и т.п.) были обнаружены основные причины возникших прихватов, а также были обнаружены ранние признаки начала возникновения прихватов. Начальный момент проявления ранних признаков и причин возникновения прихватов для каждой выборки были отмечены в виде вектора предприхватной ситуаций Y как целевой перемены (см. Фиг. 2Б). То есть в наборе данных мы выделяли предаварийные ситуации и отмечали их целевой переменной. Это необходимо для того, чтобы научить модель обнаруживать не саму аварию, а предаварийную ситуацию, чтобы по положительным результатам прогноза на прихват, на предотвращение аварии оставалась время.
Нормализация набора данных (106, Фиг. 2А). Для того чтобы сделать сходство разных образцов набора данных более заметным для модели нейронной сети 310 (Фиг. 5), что помогает модели 310 (Фиг. 5) выделять и обобщать новые наборы, производят процедуру нормализации 106 (Фиг. 2А) над набором. Суть нормализации состоит в центрировании данных и приведении их к единичной дисперсии. Нормализацию производят следующим уравнением:
где  - среднее значение по признаку
- среднее значение по признаку  (элемента мини-набора), σ - среднеквадратическое отклонение.
(элемента мини-набора), σ - среднеквадратическое отклонение.
Разделение набора данных на обучающие и тестовые наборы (108, Фиг. 2А). После того как значений набора данных были нормализованы 106 (Фиг. 2А), производят процедуру разделения набора данных 108 (Фиг. 2А) на тестовый 110 и обучающий 112 наборы. Обучающий набор 112, в свою очередь, разделяют 114 на проверочный мини-набор 116 и тренировочный мини-набор 118. Модель 310 (Фиг. 5) обучают на тренировочных 118, а качество обучения оценивают на проверочных 116 мини-наборах. После завершения обучения 310 (Фиг. 5) модель 312 (Фиг. 5) тестируют 400 (Фиг. 1) на тестовом 110 (Фиг. 2А) мини-наборе. Такой подход позволяет получить наиболее точную оценку обобщенности модели.
ЭТАП ПОДГОТОВКИ И НАСТРОЙКИ НЕЙРОННОЙ СЕТИ СО СКОЛЬЯЩИМ ОКНОМ (200, Фиг. 1 и Фиг. 3).
Выбор и обоснование параметров скользящего окна (202, Фиг. 3). Метод скользящего окна - алгоритм трансформации, позволяющий сформировать из членов временного ряда набор данных, который может служить обучающим множеством для построения модели прогнозирования.
Под окном в данном случае понимается временной интервал, содержащий набор значений входных признаков, которые используются для формирования обучающего примера. В процессе работы алгоритма окно смещается по временной последовательности на единицу наблюдения, и каждое положение окна образует один пример. Если требуется построить прогноз не на одну единицу наблюдения, а на несколько, то в качестве целевых выбирается соответствующее число значений, которое называется горизонтом прогноза. Количество временных наблюдений ряда (m), которые берутся в качестве входных значений называется глубиной прогноза (см. Фиг. 4А).
Как ранее было отмечено, имеется некоторое множество свойств, параметров и режимов бурения, которые, в свою очередь, в зависимости от времени (по истечению времени) имеют характер изменчивости (динамические параметры и режимы) и не изменчивости (статические параметры и режимы):

Запишем перечень динамических параметров и режимов в виде матрицы признаков:

где индексы  - показатель значений параметра и режима в момент времени 0, 1 и m.
- показатель значений параметра и режима в момент времени 0, 1 и m.
Также запишем статические параметры и режимы в виде матрицы признаков:
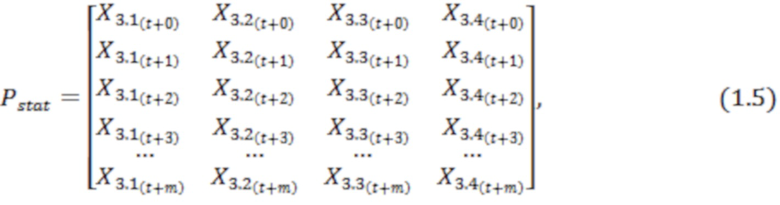
но так как Pstat не зависит о времени, следовательно, матрица признаков для Pstat примет вид матрицы-строки:

Для того что бы определять глубину и ширину скользящего окна, необходимо имеющейся матрицы признаков записать в виде векторов этих признак. Если примем, что глубина прогнозирования m=12, тогда для динамических параметров и режимов будем иметь вектор  с 444 параметрами (37*12=444), а также вектор статических параметров и режимов
с 444 параметрами (37*12=444), а также вектор статических параметров и режимов  с 4-мя параметрами. В итоге для всех наших параметров и режимов (Р) будем иметь:
с 4-мя параметрами. В итоге для всех наших параметров и режимов (Р) будем иметь:
 параметров.
параметров.
Итак, для привязки скользящего окна к модели нейронной сети, мы преобразовали наши матрицы окна (шириной 41 единиц параметров и глубиной 12 временных наблюдении) виде вектора входных параметров, в результате чего получили вектор с 445 входными параметрами, которые в наибольшей степени характеризуют состояние колонны бурильных труб, находящихся в стволе скважины. В качестве выходной информации о прихвате (целевой функции для решаемой задачи) рассматривается сигнал Y - вероятность возникновения прихватов, в виде бинарного сигнала, где:  , следовательно, из эмпирической условии классификации:
, следовательно, из эмпирической условии классификации:
если  , то для значении рассматриваемых входных признаков во временном интервале от
, то для значении рассматриваемых входных признаков во временном интервале от  до
до  отсутствует прихват;
отсутствует прихват;
если  , то для значении рассматриваемых входных признаков во временном интервале от до
, то для значении рассматриваемых входных признаков во временном интервале от до  предприхватная ситуация.
предприхватная ситуация.
Выбор типа нейронной сети 204 (Фиг. 3), количество нейронов входного и выходного слоя 206, функции ошибки и оптимизатора сети 208, а также активационной функции выходного слоя 210 сети. В предлагаемом способе применяются нейронные сети типа многослойного персептрона прямого распространения, следовательно, применяется алгоритм обучения сети с учителем и методом обратного распространения ошибки (со стохастическим градиентным спуском). Модель 312 (Фиг. 5) состоит из полносвязанной нейронной сети, на входы которой поступают 448 сигналов, следовательно, на первом слое имеется 448 нейронов. Так как предлагаемый способ прогнозирует сигнал о прихвате в вероятностном виде, на выходном слое имеется один нейрон, с активационной функцией «Sigmoid» и функцией ошибки «Binary cross-entropy». Основные параметры, настройки и характеристики, а также оптимальные гиперпараметры модели 312 представлены на Фиг. 4Б (314).
ЭТАП ОБУЧЕНИЯ СЕТИ (300, Фиг. 1 и Фиг. 5)
Предварительное обучение сети на тренировочных и проверочных мини-наборах (302, Фиг. 5). После того как обосновывается исходная конфигурация сети (из условий решаемой задачи), запускается экспериментальная процедура предварительное обучение сети, по результатам серии экспериментальных вычислении, настраиваются и выбираются наилучшие гиперпараметры сети 304.
Регуляризация процесса обучения сети (306, Фиг. 5). Глубокие нейронные сети с большим количеством слоев, способны создавать коадаптации элементов. «Коадаптация» - термин из нейронауки, означающий ситуацию, при которой связь между двумя элементами становится чрезвычайно сильной за счет ослабления связей между другими элементами. Обычно это приводит к переобучению модели на текущих данных. Один из вариантов борьбы с переобучением сети - это регуляризация (regularization). Истоки понятия регуляризации лежат в теории численной оптимизации. Известно, что большинство алгоритмов машинного обучения оптимизируют функцию потерь для поиска наиболее вероятных значений параметров (или «модели»), объясняющих наблюдаемые значения, то есть минимизирующих потери. Для большинства наборов данных и задач существует несколько решений (возможных моделей) задачи оптимизации. Одним из решений является структурная регуляризация под названием «прореживание» (dropout). Во время обучения прореживание отбрасывает на вероятностной основе связи между элементами из двух смежных слоев.
Вероятностное прореживание связей между элементами позволяет гарантировать, что никакой конкретный элемент не окажется в постоянной зависимости от другого конкретного элемента, благодаря чему модели становятся ошибкоустойчивыми. Прореживание не требует добавления в модель дополнительных параметров, а лишь одного гиперпараметра - «вероятности прореживания». Коэффициент прореживания - это вероятность, при которой прореживаются связи между элементами, обычно выбирается в диапазоне от 0,1 до 0,5. В нашем случае, экспериментальным способом выбраны коэффициенты прореживания 0,3. Важно отметить, что прореживание применяется только во время обучения, следовательно, на этапе тестирования прореживание не производится. А также, с целю, предотвращение переобучения сети, производится визуальный контроль процесса обучения 308, точнее наблюдают за значениями долей ошибок для тренировочных и проверочных мини-наборах по каждой эпохе обучения. По мере прохождений эпох обучения сети, как только доля ошибки на проверочных мини-наборах начинает расти (увеличиваться), процесс обучения сети останавливается на текущей эпохе. В предлагаемом способе, результаты экспериментальных вычислении показали, что момент наступления переобучения сети начинается с 57-й эпохи, следовательно, оптимальное количество эпох составляет 45-55. Оптимальные настройки и гиперпараметры модели 312 (Фиг. 5) представлены на Фиг. 4Б (314).
ЭТАП ТЕСТИРОВАНИЯ И ОЦЕНКИ СЕТИ (400, Фиг. 1).
После того как модель 312 (Фиг. 5) была обучена, производится процедура тестирования модели 312 с оценкой точности работы модели 312 на тестовом наборе данных 110 (Фиг. 2А).
Обобщенная оценка качества работы сети производится методом кросс-валидации по k-блокам. Имеющийся набор данных 106 случайным образом подразделяют на 10-блоков мини-данных 600 (Фиг. 6). В качестве обучающей выборки применяют 9 из них 602, а один блок мини-данных 601 в качестве проверочных, и проводят обучения и оценка сети. Процедуру повторяют 10-раз, в результате чего, получают 10 моделей с их оценками качества работы сети ( ). Затем вычисляют среднюю ошибку работы модели, на основе разных независимых блоков:
). Затем вычисляют среднюю ошибку работы модели, на основе разных независимых блоков:  , где
, где  - значения ошибка сети i-той модели.
- значения ошибка сети i-той модели.
Метод кросс-валидации по k-блокам позволяет выполнять тонкие настройки модели, т.е. находить оптимальные значения гиперпараметров, которые дают удовлетворительную обобщающую способность. После того как определяют удовлетворительные значения гиперпараметров, повторно производят процесс обучения модели на полном обучающем наборе. В результате получают окончательную оценку качества модели на базе независимых тестовых наборов. С учетом того, что k-блочная кросс-валидация - это метод генерирования повторных образцов без возврата (непересекающихся образцов), преимущество этого подхода заключается в том, что каждая точка образца является частью обучающего и проверочного наборов данных ровно один раз, что в итоге позволяет получить более низкодисперсную оценку качества модели.
ЭТАП ПРОГНОЗИРОВАНИЕ ПРИХВАТОВ В ПРОЦЕССЕ БУРЕНИЯ СКВАЖИНЫ (500, Фиг. 1 и Фиг. 7).
После того как вышесказанные этапы выполнены, осуществляют прогнозирование прихватов бурильных труб в процессе бурения скважины (в режиме реального времени).
Вариант 1. Прогнозирование в процессе бурения скважины (в режиме реального времени).
Считывают (измеряют, рассчитывают, выбирают и определяют) параметры и режимы бурения со станции ГТИ, а также измеряют и определяют параметры 502 (Фиг. 7) с процесса бурения скважины для прогнозируемой (бурящийся) скважины; далее сравнивают 504 значение таких параметров как: Х23 - длины не обсаженной части или открытого участка ствола скважины и Х24 - длины технологического инструмента находящий в зоне открытого ствола, если они (Х23 и Х24) меньше нуля, то цикл замыкается с позицией 502 до тех пор, пока значения Х23 и Х24 не станет больше нуля. Если значение Х23 и Х24 больше нуля, то производят нормализацию значения полученных параметров и режимов (элементов входных данных) 506 и передают в модель прогнозирования 312, которая, в свою очередь, выдает прогноз 508 на прихват: если модель прогнозирует отсутствие прихвата 510, то на этом завершается процедура прогнозирования для имеющихся входных данных в момент времени t+m; если модель прогнозирует прихват, тогда необходимо скорректировать значения параметров и режимов бурения 512 для имеющихся входных данных в момент времени t+m, и повторять процедуру прогнозирования для входных данных 502 со смешенным окном прогнозирования на временной шаг t+m, до тех пор, пока не достигается отрицательного прогноза 510 на прихват.
Предлагаемый способ был реализован (воспроизведен) с использованием промысловых данных о прихватах с архивных данных Российских нефтегазовых (сервисных) компаний ОАО «Паритет» и ОАО «РУСГЕОСЕРВИС», записанными станциями ГТИ «ГЕОТЕСТ-5» за период с 2016 по 2020 гг. В результате, способом были получены прогнозные значения, показывающие вероятность возникновения прихватов. Способ демонстрировал прогнозирования прихватов с точностью 88% (на сбалансированных данных), 96% (на не сбалансированных данных).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ прогнозирования прихватов бурильных труб | 2020 |
|
RU2735794C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ВЫЯВЛЕНИЯ И ПРОГНОЗИРОВАНИЯ ОСЛОЖНЕНИЙ В ПРОЦЕССЕ СТРОИТЕЛЬСТВА НЕФТЯНЫХ И ГАЗОВЫХ СКВАЖИН | 2020 |
|
RU2745137C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ВЫЯВЛЕНИЯ И ПРОГНОЗИРОВАНИЯ ОСЛОЖНЕНИЙ В ПРОЦЕССЕ СТРОИТЕЛЬСТВА НЕФТЯНЫХ И ГАЗОВЫХ СКВАЖИН | 2020 |
|
RU2745136C1 |
| СПОСОБЫ И ОТНОСЯЩИЕСЯ К НИМ СИСТЕМЫ ПОСТРОЕНИЯ МОДЕЛЕЙ И ПРОГНОЗИРОВАНИЯ ОПЕРАЦИОННЫХ РЕЗУЛЬТАТОВ ОПЕРАЦИИ БУРЕНИЯ | 2013 |
|
RU2600497C2 |
| СПОСОБ И КОМПЬЮТЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ БУРЕНИЕМ СКВАЖИН | 2019 |
|
RU2723805C1 |
| Способ и система для предупреждения о предстоящих аномалиях в процессе бурения | 2021 |
|
RU2772851C1 |
| ПРОГНОЗИРОВАНИЕ БУРИМОСТИ ИСХОДЯ ИЗ ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ, ИСПУСКАЕМОГО В ХОДЕ БУРОВЫХ РАБОТ | 2013 |
|
RU2657277C2 |
| ОЦЕНКА ПАРАМЕТРОВ НАКЛОННО-НАПРАВЛЕННОГО БУРЕНИЯ НА ОСНОВЕ МОДЕЛИ ПРИ ПРОВЕДЕНИИ СКВАЖИННЫХ ОПЕРАЦИЙ | 2019 |
|
RU2754892C1 |
| УПРЕЖДАЮЩЕЕ ИЗМЕНЕНИЕ ЗАДАННОГО ДАВЛЕНИЯ ДЛЯ ОТВЕДЕНИЯ ПОТОКА ПРИ БУРОВЫХ РАБОТАХ | 2011 |
|
RU2586148C2 |
| СПОСОБ И КОМПЬЮТЕРНАЯ СИСТЕМА ОБРАБОТКИ СКВАЖИННЫХ ДАННЫХ | 2020 |
|
RU2782505C2 |
Изобретение относится к нефтегазовой области и может быть использовано для прогнозирования прихватов колонны бурильных труб в процессе бурения нефтяных и газовых скважин с использованием нейросетевой модели. Технический результат изобретения - повышение достоверности прогнозирования и диагностирования состояния колонны бурильных труб на риск возникновении прихватов. Способ прогнозирования осуществляется следующим образом. Считывают параметры и режимы бурения со станции ГТИ, а также измеряют и определяют параметры с процесса бурения скважины, для прогнозируемой бурящийся скважины; далее сравнивают значение таких параметров, как: Х23 - длины не обсаженной части или открытого участка ствола скважины и Х24 - длины технологического инструмента, находящегося в зоне открытого ствола, если они (Х23 и Х24) меньше нуля, то цикл замыкается с позицией до тех пор, пока значения Х23 и Х24 не станет больше нуля. Если значение Х23 и Х24 больше нуля, то производят нормализацию значения полученных параметров и режимов и передают в модель прогнозирования, которая, в свою очередь, выдает прогноз на прихват: если модель прогнозирует отсутствие прихвата, то на этом завершается процедура прогнозирования для имеющихся входных данных в момент времени t+m; если модель прогнозирует прихват, тогда необходимо скорректировать значения параметров и режимов бурения для имеющихся входных данных в момент времени t+m и повторять процедуру прогнозирования для входных данных со смешенным окном прогнозирования на временной шаг t+m до тех пор, пока не достигается отрицательный прогноз на прихват. 7 ил.
Способ прогнозирования прихватов бурильных труб в процессе бурения скважины в режиме реального времени, характеризующийся тем, что
- из множества считываемых, измеряемых параметров и режимов бурения со станции геолого-технологических исследований, а также измеряемых и определяемых параметров с процесса бурения скважины, создают перечень входных признаков Хij для прогнозирования прихватов;
- создают набор данных о прихватах из записей ранее пробуренных скважин;
- размечают, маркируют образцы набора данных о прихватах по предприхватным признакам;
- проводят процедуру нормализаций значений набора данных о прихватах, с последующим разделением набора данных на мини-наборы;
- на основе перечня входных признаков Xij считываемых, измеряемых параметров и режимов бурения со станции геолого-технологических исследований, а также измеряемых и определяемых параметров с процесса бурения скважины, определяют параметры скользящего окна;
- на базе искусственной нейронной сети создают модель прогнозирования прихватов;
- проводят процедуру обучения модели прогнозирования по тренировочным и проверочным мини-наборам данных;
- тестируют обученную модель на тестовом мини-наборе данных;
- осуществляют оценку качества работы модели на полном наборе данных методом k-блочной кросс-валидации;
- осуществляют процедуру прогнозирования прихватов колонны бурильных труб с помощью обученной модели нейронной сети и получают результаты прогнозных значений, показывающие вероятность возникновения прихватов в процессе бурения скважины, следующим путем: считывают, измеряют, рассчитывают, выбирают и определяют параметры и режимы бурения со станции геолого-технологических исследований, а также измеряют и определяют параметры с процесса бурения скважины для прогнозируемой скважины; далее сравнивают значения таких параметров, как: Х23 - длины не обсаженной части или открытого участка ствола скважины и Х24 - длины технологического инструмента, находящегося в зоне открытого ствола, если Х23 и Х24 меньше нуля, то цикл замыкается с позицией считывания параметров и режимов до тех пор, пока значения Х23 и Х24 не станут больше нуля, если значения Х23 и Х24 больше нуля, то производят нормализацию значений, полученных параметров и режимов и передают в модель прогнозирования, которая, в свою очередь, выдает прогноз на прихват: если модель прогнозирует отсутствие прихвата, то на этом завершается процедура прогнозирования для имеющихся входных данных в момент времени t+m; если модель прогнозирует прихват, тогда необходимо скорректировать значения параметров и режимов бурения для имеющихся входных данных в момент времени t+m и повторять процедуру прогнозирования для входных данных со смещенным окном прогнозирования на временной шаг t+m до тех пор, пока не достигается отрицательный прогноз на прихват.
| US 10513920 B2, 24.12.2019 | |||
| WO 2019216891 A1, 14.11.2019 | |||
| RU 2015123680 A, 08.02.2017 | |||
| RU 2016110570 A, 30.11.2017. |

