Область техники
[0001] Настоящее изобретение относится к системе обнаружения препятствия.
Уровень техники
[0002] Известно устройство обнаружения препятствий в пределах железнодорожного переезда. Например, в патентном документе 1 описано устройство обнаружения препятствия на железнодорожном переезде (система обнаружения препятствия), которое передает радиоволну в пределах области, включающей в себя железнодорожный переезд, и принимает отраженную волну, соответствующую радиоволне, для обнаружения препятствия.
Список цитированных документов
Патентные документы
[0003]
Патентный документ 1: Не прошедшая экспертизу заявка на патент Японии № 2012-101643
Раскрытие сущности изобретения
Техническая проблема
[0004] Поскольку электромагнитные волны, такие как электрические волны и лазерный свет, затухают вследствие ухудшения условий внешней окружающей среды, например при густом тумане и сильном дожде, точность обнаружения препятствия может снижаться в зависимости от состояния внешней окружающей среды. Таким образом, система обнаружения препятствия может выводить сигнал, указывающий на отказ системы обнаружения препятствия, в устройство управления железнодорожным переездом при ухудшении условий внешней окружающей среды.
[0005] Тем не менее, когда выводится сигнал, указывающий на отказ системы обнаружения препятствия, может потребоваться прекратить подачу электропитания в систему обнаружения препятствия. Поскольку в этом случае препятствия не обнаруживаются, для предотвращения выезда поездов, транспортных средств и выхода людей на железнодорожные пути с точки зрения безопасности может выводиться сигнал остановки, и переездный шлагбаум может находиться в закрытом состоянии.
[0006] Настоящее изобретение описывает систему обнаружения препятствия, которая может продолжать функционировать даже при ухудшении условий внешней окружающей среды.
Решение проблемы
[0007] Система обнаружения препятствия согласно одному аспекту настоящего изобретения представляет собой систему, которая обнаруживает препятствие в пределах железнодорожного переезда. Система обнаружения препятствия включает в себя: модуль обнаружения, который направляет электромагнитную волну на отражатель, установленный на железнодорожном переезде, и принимает отраженную волну, соответствующую электромагнитной волне; модуль управления, который определяет состояние окружающей среды в пределах железнодорожного переезда на основе отраженной волны; и модуль вывода, который выводит наружу сигнал присутствия/отсутствия препятствия, указывающий на присутствие препятствия, когда модуль управления определяет, что состояние окружающей среды является аномальным.
Полезные эффекты изобретения
[0008] Настоящее изобретение может обеспечить систему обнаружения препятствия, которая может продолжать функционировать даже при ухудшении окружающей среды.
Краткое описание чертежей
[0009] На ФИГ. 1 схематически показана конфигурация системы управления железнодорожным переездом, включающая в себя систему обнаружения препятствия согласно варианту осуществления.
На ФИГ. 2 показана схема, иллюстрирующая пример конфигурации модуля обнаружения, показанного на ФИГ. 1.
На ФИГ. 3 показана схема, поясняющая область обнаружения на железнодорожном переезде.
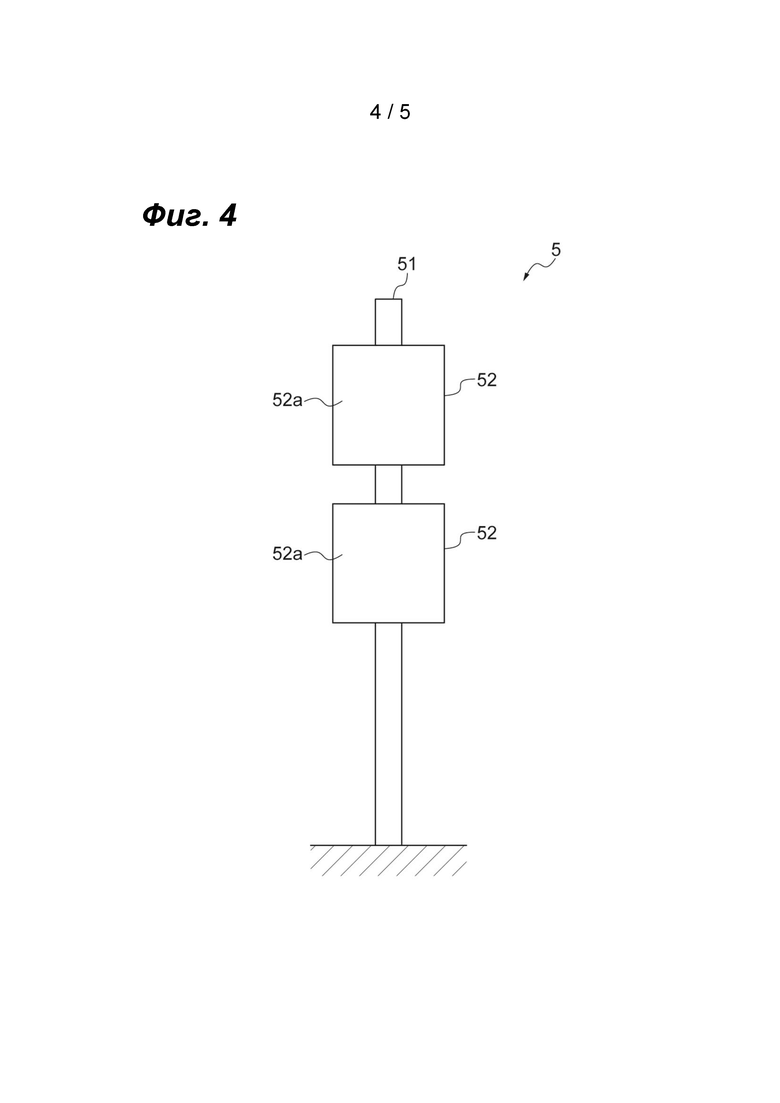
На ФИГ. 4 схематически показана конфигурация отражателя, предусмотренного в области обнаружения, проиллюстрированной на ФИГ. 3.
На ФИГ. 5 показана схема, иллюстрирующая пример конфигурации модуля ввода/вывода, показанного на ФИГ. 1.
Осуществление изобретения
[0010] Поскольку описанный далее вариант осуществления согласно настоящему изобретению используется в целях иллюстрации настоящего изобретения, настоящее изобретение не должно ограничиваться нижеследующим содержанием.
[0011] [1] Описание варианта осуществления
Система обнаружения препятствия согласно одному аспекту настоящего изобретения представляет собой систему, которая обнаруживает препятствие в пределах железнодорожного переезда. Система обнаружения препятствия включает в себя: модуль обнаружения, который направляет электромагнитную волну на отражатель, установленный на железнодорожном переезде, и принимает отраженную волну, соответствующую электромагнитной волне; модуль управления, который определяет состояние окружающей среды в пределах железнодорожного переезда на основе отраженной волны; и модуль вывода, который выводит наружу сигнал присутствия/отсутствия препятствия, указывающий на присутствие препятствия, когда модуль управления определяет, что состояние окружающей среды является аномальным.
[0012] В системе обнаружения препятствия электромагнитная волна направляется на отражатель, установленный на железнодорожном переезде, состояние окружающей среды в пределах железнодорожного переезда определяется на основе отраженной волны, соответствующей электромагнитной волне, и, когда состояние окружающей среды определяется как аномальное, сигнал присутствия/отсутствия препятствия, указывающий на присутствие препятствия, выводится наружу. Как описано выше, аномальность состояния окружающей среды выводится наружу вследствие присутствия препятствия, а не вследствие отказа системы обнаружения препятствия. Когда выводится сигнал присутствия/отсутствия препятствия, не требуется прекращать подачу электропитания в систему обнаружения препятствия, вследствие чего система обнаружения препятствия может продолжать функционировать даже при ухудшении условий внешней окружающей среды.
[0013] Модуль обнаружения может направлять электромагнитную волну в область обнаружения, включающую в себя область мониторинга, заданную в пределах железнодорожного переезда, и отражатель для сканирования области обнаружения, и может принимать отраженную волну. Модуль управления может определять, присутствует ли препятствие в области мониторинга, на основе отраженной волны из области мониторинга. Модуль вывода может выводить сигнал присутствия/отсутствия препятствия, когда модуль управления определяет присутствие препятствия. В этом случае, подавая электромагнитную волну для сканирования области обнаружения, можно определять присутствие/отсутствие препятствия и состояние окружающей среды.
[0014] Модуль обнаружения может иметь внутренний канал, способный распространять электромагнитную волну. Модуль обнаружения может обеспечивать вхождение электромагнитной волны через первый конец внутреннего канала и принимать испущенную волну, испущенную вторым концом внутреннего канала. Модуль управления может определять, произошел ли отказ модуля обнаружения, на основе испущенной волны. В этом случае можно определять отказ модуля обнаружения, например, вследствие недостаточной интенсивности электромагнитной волны.
[0015] Модуль управления может определять состояние окружающей среды при определении, что произошел отказ модуля обнаружения. Когда произошел отказ модуля обнаружения, модуль обнаружения может быть не способен точно определять состояние окружающей среды. Таким образом, когда определено, что произошел отказ модуля обнаружения, определяется состояние окружающей среды, в связи с чем можно улучшить точность определения состояния окружающей среды.
[0016] Модуль управления может определять, произошел ли отказ системы обнаружения препятствия. Модуль вывода может выводить наружу сигнал состояния, указывающий на отказ системы обнаружения препятствия, когда модуль управления определяет, что произошел отказ системы обнаружения препятствия. В этом случае об отказе системы обнаружения препятствия может быть сообщено наружу.
[0017] Система обнаружения препятствия может дополнительно включать в себя выключатель питания для переключения между включенным состоянием, в котором электропитание подается в систему обнаружения препятствия, и выключенным состоянием, в котором прекращается подача электропитания в систему обнаружения препятствия. Выключатель питания может быть переключен в выключенное состояние, когда модуль вывода выводит сигнал состояния. В этом случае, когда выводится сигнал состояния, указывающий на отказ системы обнаружения препятствия, подача электропитания в систему обнаружения препятствия прекращается. Таким образом, можно предотвратить неправильное функционирование системы обнаружения препятствия.
[0018] Модуль обнаружения может направлять лазерный свет в качестве электромагнитной волны. В этом случае, даже если система обнаружения препятствия использует лазерный свет, система обнаружения препятствия может продолжать функционировать и при ухудшении условий внешней окружающей среды.
[0019] [2] Иллюстрация варианта осуществления
Далее со ссылкой на чертежи будет описан вариант осуществления настоящего изобретения. При описании чертежей одинаковые элементы будут указаны посредством одинаковых ссылочных обозначений, вследствие чего их описание не будет повторяться.
[0020] На ФИГ. 1 схематически показана конфигурация системы управления железнодорожным переездом, включающей в себя систему обнаружения препятствия согласно варианту осуществления. Как показано на ФИГ. 1, система 1 управления железнодорожным переездом включает в себя контроллер 2 железнодорожного переезда и систему 3 обнаружения препятствия. Контроллер 2 железнодорожного переезда и система 3 обнаружения препятствия соединены друг с другом посредством сигнальных линий для передачи и приема трех сигналов (сигнала S1 запуска/остановки, сигнал S2 присутствия/отсутствия препятствия и сигнала S3 состояния). В настоящем варианте осуществления сигнальная линия для передачи и приема каждого сигнала является дублированной.
[0021] Контроллер 2 железнодорожного переезда управляет оборудованием железнодорожного переезда, предусмотренным на железнодорожном переезде. Примеры оборудования железнодорожного переезда включают в себя железнодорожный шлагбаум, предупредительную сигнализацию, световую сигнализацию, срабатывающую при функционировании железнодорожного переезда, и специальное светоизлучающее устройство. Контроллер 2 железнодорожного переезда выводит сигнал S1 запуска/остановки в систему 3 обнаружения препятствия. Сигнал S1 запуска/остановки представляет собой сигнал для инструктирования системы 3 обнаружения препятствия запускать и останавливать обработку, связанную с обнаружением препятствия. Контроллер 2 железнодорожного переезда выводит сигнал S1 запуска/остановки, указывающий на запуск обработки, связанной с обнаружением, например, в ответ на приближение поезда к железнодорожному переезду. Контроллер 2 железнодорожного переезда выводит сигнал S1 запуска/остановки, указывающий на остановку обработки, связанной с обнаружением, например, в ответ на проезд поезда через железнодорожный переезд.
[0022] Контроллер 2 железнодорожного переезда принимает сигнал S2 присутствия/отсутствия препятствия и сигнал S3 состояния из системы 3 обнаружения препятствия. Сигнал S2 присутствия/отсутствия препятствия представляет собой сигнал, указывающий, присутствует ли препятствие в пределах железнодорожного переезда. Сигнал S3 состояния представляет собой сигнал, указывающий, является ли состояние системы 3 обнаружения препятствия нормальным или аномальным. Контроллер 2 железнодорожного переезда побуждает специальное сигнальное светоизлучающее устройство отображать сигнал остановки для предотвращения выезда поезда на железнодорожный переезд, например, когда сигнал S2 присутствия/отсутствия препятствия указывает, что в пределах железнодорожного переезда присутствует препятствие. Контроллер 2 железнодорожного переезда управляет оборудованием железнодорожного переезда с тем, чтобы предотвращать выезд поездов, транспортных средств и выход людей на железнодорожный переезд, например, когда сигнал S3 состояния указывает, что состояние системы 3 обнаружения препятствия является аномальным.
[0023] Система 3 обнаружения препятствия представляет собой систему, которая обнаруживает препятствия в пределах железнодорожного переезда. Система 3 обнаружения препятствия выводит сигнал S2 присутствия/отсутствия препятствия и сигнал S3 состояния в контроллер 2 железнодорожного переезда (наружу). Система 3 обнаружения препятствия принимает сигнал S1 запуска/остановки из контроллера 2 железнодорожного переезда. Система 3 обнаружения препятствия выполняет обработку, связанную с обнаружением препятствия, когда сигнал S1 запуска/остановки указывает «запуск». Система 3 обнаружения препятствия заканчивает обработку, связанную с обнаружением препятствия, когда сигнал S1 запуска/остановки указывает «остановка».
[0024] Система 3 обнаружения препятствия включает в себя модуль 10 обнаружения, модуль 20 управления, модуль 30 ввода/вывода и выключатель 40 питания. Модуль 10 обнаружения представляет собой модуль, который направляет электромагнитную волну для сканирования области Rd обнаружения (см. ФИГ. 3) и принимает отраженную волну из области Rd обнаружения. Область Rd обнаружения представляет собой область, в которой модуль 10 обнаружения может обнаруживать препятствие, а также область, которая может облучаться электромагнитной волной. В качестве электромагнитной волны можно использовать свет, например, лазерный свет, радиоволны, например, микроволны, и т.д. Настоящий вариант осуществления будет описан с использованием лазерного света в качестве электромагнитной волны. Модуль 20 управления представляет собой модуль, который управляет различными операциями системы 3 обнаружения препятствия. Модуль 30 ввода/вывода представляет собой интерфейс ввода/вывода, который передает сигналы в контроллер 2 железнодорожного переезда и принимает сигналы из него. Модуль 10 обнаружения, модуль 20 управления и модуль 30 ввода/вывода будут описаны подробно в дальнейшем.
[0025] Выключатель 40 питания соединен с внешним источником PS питания и представляет собой элемент для переключения между включенным состоянием и выключенным состоянием. Включенное состояние является состоянием, в котором оба вывода выключателя 40 питания электрически соединены друг с другом. Когда выключатель 40 питания находится во включенном состоянии, электропитание подается из источника PS питания в систему 3 обнаружения препятствия через выключатель 40 питания. Выключенное состояние является состоянием, в котором оба вывода выключателя 40 питания электрически отсоединены друг от друга. Когда выключатель 40 питания находится в выключенном состоянии, прекращается подача электропитания в систему 3 обнаружения препятствия. Примеры выключателя 40 питания включают в себя полупроводниковый переключатель и механическое реле. После приема сигнала NEG выключения из модуля 30 ввода/вывода выключатель 40 питания переключается в выключенное состояние.
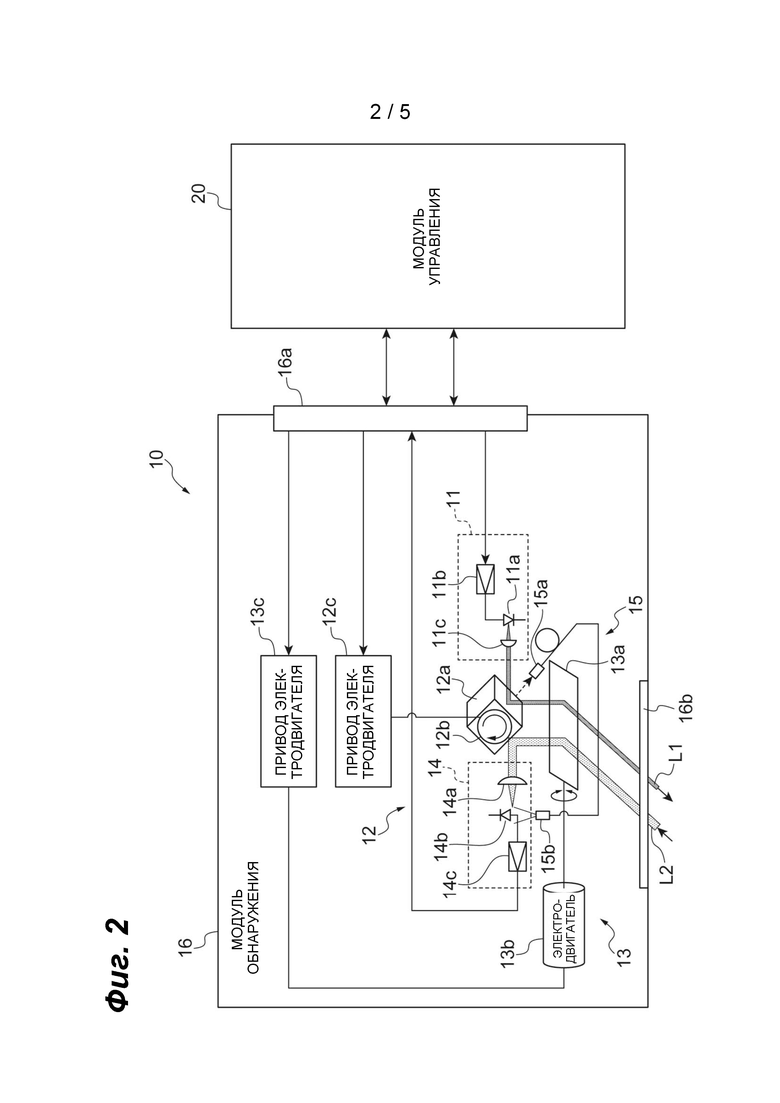
[0026] Далее со ссылкой на ФИГ. 2-4 будет подробно описан модуль 10 обнаружения. На ФИГ. 2 показа схема, иллюстрирующая пример конфигурации модуля обнаружения, показанного на ФИГ. 1. На ФИГ. 3 показана схема, поясняющая область обнаружения на железнодорожном переезде. На ФИГ. 4 схематически показана конфигурация отражателя, предусмотренного в области обнаружения, показанной на ФИГ. 3.
[0027] Как показано на ФИГ. 2 и 3, модуль 10 обнаружения направляет лазерный свет L1 в область Rd обнаружения и принимает отраженный свет L2 из области Rd обнаружения. Модуль 10 обнаружения представляет собой лазерный радар. Модуль 10 обнаружения сканирует область Rd обнаружения в направлении основного сканирования и направлении вспомогательного сканирования, используя лазерный свет L1. Облучение области Rd обнаружения лазерным светом L1 повторяется через заданные интервалы времени. Область Rd обнаружения включает в себя область Rm мониторинга, заданную в пределах железнодорожного переезда RC. Область Rm мониторинга представляет собой область, подлежащую мониторингу в области Rd обнаружения, и, например, область, в которой железнодорожный путь и дорога пересекаются друг с другом на плоскости. Модуль 10 обнаружения устанавливается около железнодорожного переезда RC.
[0028] Столбчатая конструкция 5 устанавливается на железнодорожном переезде RC. Как показано на ФИГ. 4, столбчатая конструкция 5 включает стойку 51, прямостоящую в области Rd обнаружения, и отражатель 52, прикрепленный к стойке 51. Отражатель 52 имеет зеркальную поверхность 52а, обращенную к модулю 10 обнаружения. Зеркальная поверхность 52а отражает лазерный свет L1, испущенный модулем 10 обнаружения, и испускает отраженный свет L2 в модуль 10 обнаружения. Другими словами, отражатель 52 расположен в пределах области Rd обнаружения, и ориентация зеркальной поверхности 52а настраивается таким образом, чтобы лазерный свет L1, испущенный модулем 10 обнаружения, отражался в направлении модуля 10 обнаружения. Отражатель 52 используется для оценки состояния окружающей среды в пределах железнодорожного переезда RC. При оценке состояния окружающей среды определяется, является ли состояние окружающей среды нормальным. Нормальным состоянием окружающей среды является состояние, в котором обнаружение препятствия может выполняться нормально. Аномальным состоянием окружающей среды является состояние, в котором уменьшается точность обнаружения препятствия, и состояние, в котором коэффициент затухания света увеличивается из-за, например, дождя, снега, тумана, конденсата, пыли и т. п. Увеличение коэффициента затухания света обусловлено диффузией мелкодисперсных частиц.
[0029] В настоящем варианте осуществления столбчатая конструкция 5 включает в себя два отражателя 52, но может включать в себя один отражатель 52 или может включать в себя три или более отражателей 52. Чем больше число отражателей 52, тем меньше влияние пятен и повреждений на зеркальной поверхности 52а.
[0030] Модуль 10 обнаружения включает в себя светоизлучающий модуль 11, модуль 12 основного сканирования, модуль 13 вспомогательного сканирования, светопринимающий модуль 14 и внутренний оптический канал 15 (внутренний канал). В настоящем варианте осуществления модуль 10 обнаружения имеет корпус 16. Светоизлучающий модуль 11, модуль 12 основного сканирования, модуль 13 вспомогательного сканирования, светопринимающий модуль 14 и внутренний оптический канал 15 заключены в корпус 16. Корпус 16 снабжен соединителем 16а, и кабель соединен с соединителем 16а. Модуль 10 обнаружения и модуль 20 управления соединены с возможностью осуществления связи через кабель.
[0031] Светоизлучающий модуль 11 испускает импульсный лазерный свет в ответ на команду проецирования света из модуля 20 управления. Команда проецирования света указывает момент времени для испускания лазерного света. Светоизлучающий модуль 11 включает в себя светоизлучающий элемент 11а, драйвер 11b и линзу 11с. Светоизлучающий элемент 11а представляет собой элемент, способный испускать лазерный свет. В качестве светоизлучающего элемента 11а используется, например, полупроводниковый лазерный элемент (лазерный диод). Драйвер 11b представляет собой схему возбуждения для светоизлучающего элемента 11а и побуждает светоизлучающий элемент 11а испускать импульсный лазерный свет, причем лазерный свет испускается в направлении линзы 11с в ответ на команду проецирования света. Линза 11с представляет собой светопроекционную линзу. В качестве линзы 11с используется, например, коллиматорная линза. Линза 11с коллимирует лазерный свет, испущенный из светоизлучающего элемента 11а, и испускает коллимированный лазерный свет в модуль 12 основного сканирования.
[0032] Модуль 12 основного сканирования выполняет сканирование лазерный светом, испущенным из светоизлучающего модуля 11 (светоизлучающего элемента 11а), в направлении основного сканирования в области Rd обнаружения. Модуль 12 основного сканирования включает в себя многоугольное зеркало 12а, электродвигатель 12b и привод 12с электродвигателя. Многоугольное зеркало 12а представляет собой многогранник (в данном случае гексаэдр), который может вращаться с высокой скоростью. Многоугольное зеркало 12а имеет две боковые поверхности, обращенные друг к другу в направлении, в котором проходит ось вращения многоугольного зеркала 12а, и четыре зеркальные поверхности, имеющие одинаковую ширину и соединяющие две боковые поверхности. Электродвигатель 12b представляет собой электродвигатель, который вращает многоугольное зеркало 12а вокруг оси вращения. Привод 12с электродвигателя представляет собой приводную схему, которая вращает электродвигатель 12b с заданной скоростью вращения. Лазерный свет, испущенный из светоизлучающего элемента 11а, отражается зеркальной поверхностью вращающегося многоугольного зеркала 12а так, чтобы сканирование выполнялось лазерным светом в направлении основного сканирования.
[0033] Модуль 13 вспомогательного сканирования выполняет сканирование лазерным светом в направлении вспомогательного сканирования области Rd обнаружения. Модуль 13 вспомогательного сканирования включает в себя поворотное зеркало 13а, электродвигатель 13b и привод 13с электродвигателя. Поворотное зеркало 13а выполнено с возможностью поворачиваться вокруг оси, ортогональной оси вращения многоугольного зеркала 12а. Поворотное зеркало 13а расположено в направлении испускания лазерного света, отражаемого многоугольным зеркалом 12а, и имеет зеркальную поверхность, обращенную к многоугольному зеркалу 12а. Поворотное зеркало 13а также называется гальванометрическим зеркалом. Электродвигатель 13b представляет собой электродвигатель, который поворачивает поворотное зеркало 13а. Привод 13с электродвигателя представляет собой приводную схему, которая поворачивает электродвигатель 13b в пределах заданного диапазона углов в заданный момент времени.
[0034] Лазерный свет, отраженный многоугольным зеркалом 12а, отражается зеркальной поверхностью поворачивающегося поворотного зеркала 13а так, чтобы сканирование выполнялось лазерным светом в направлении вспомогательного сканирования. Лазерный свет, отраженный поворотным зеркалом 13а, испускается в качестве лазерного света L1 наружу из модуля 10 обнаружения (корпуса 16) через окошко 16b, предусмотренное в корпусе 16, и направляется в область Rd обнаружения при выполнении сканирования в направлении основного сканирования и направлении вспомогательного сканирования. Окошко 16b выполнено из материала, такого как стекло, способного пропускать лазерный свет L1 и отраженный свет L2.
[0035] Лазерный свет L1, направленный в область Rd обнаружения, отражается в области Rd обнаружения и поступает в качестве отраженного света L2 в модуль 10 обнаружения через окошко 16b. Отраженный свет L2 последовательно отражается поворотным зеркалом 13а и многоугольным зеркалом 12а и поступает в светопринимающий модуль 14.
[0036] Светопринимающий модуль 14 принимает отраженный свет и генерирует принятый световой сигнал, указывающий интенсивность отраженного света. Светопринимающий модуль 14 включает в себя линзу 14а, светопринимающий элемент 14b и усилитель 14с. Линза 14а представляет собой светопринимающую линзу. В качестве линзы 14а используется, например, конденсорная линза. Линза 14а собирает отраженный свет и испускает собранный отраженный свет в светопринимающий элемент 14b. Светопринимающий элемент 14b осуществляет фотоэлектрическое преобразование отраженного света для генерирования принятого светового сигнала, указывающего интенсивность отраженного света. В качестве светопринимающего элемента 14b используется, например, фотодиод. Светопринимающий элемент 14b выводит принятый световой сигнал в усилитель 14с. Усилитель 14с усиливает принятый световой сигнал и передает усиленный принятый световой сигнал в модуль 20 управления.
[0037] Внутренний оптический канал 15 выполнен с возможностью распространения лазерного света. Внутренний оптический канал 15 выполнен, например, из оптоволокна. Один конец 15а внутреннего оптического канала 15 расположен в направлении испускания лазерного света, отраженного многоугольным зеркалом 12а. Другой конец 15b внутреннего оптического канала 15 расположен в направлении светопринимающего элемента 14b. Лазерный свет, отраженный многоугольным зеркалом 12а, входит через один конец 15а и испускается через другой конец 15b при каждом основном сканировании. Испущенный свет, испущенный другим концом 15b, принимается светопринимающим элементом 14b.
[0038] Далее со ссылкой на ФИГ. 1 и 5 будут подробно описаны модуль 20 управления и модуль 30 ввода/вывода. На ФИГ. 5 показана схема, иллюстрирующая пример конфигурации модуля ввода/вывода, показанного на ФИГ. 1.
[0039] Как показано на ФИГ. 5, модуль 20 управления включает в себя модуль 21 обработки и модуль 22 обработки. Модуль 21 обработки и модуль 22 обработки выполнены в виде компьютера, включающего в себя процессор, основное устройство хранения, вспомогательное устройство хранения и модуль связи, который осуществляет связь с другими устройствами. Примеры процессора включают в себя центральный процессор (ЦП) и цифровой сигнальный процессор (ЦСП). Основное устройство хранения включает в себя оперативное запоминающее устройство (ОЗУ), постоянное запоминающее устройство (ПЗУ) и т. п. Примеры вспомогательного устройства хранения включают в себя полупроводниковое запоминающее устройство и накопитель на жёстком диске.
[0040] Модуль 21 обработки и модуль 22 обработки выполняют одну и ту же обработку параллельно друг с другом. Другими словами, модуль 21 обработки и модуль 22 обработки составляют систему сдвоенных устройств. В настоящем варианте осуществления модуль 21 обработки является основным устройством, а модуль 22 обработки - вспомогательным устройством. Поскольку модуль 21 обработки и модуль 22 обработки выполняют одну и ту же обработку, главным образом будет описан модуль 21 обработки.
[0041] Модуль 21 обработки запускает различные части обработки, когда сигнал STR1 запуска, выводимый из модуля 30 ввода/вывода, указывает «запуск», и модуль 21 обработки останавливает различные части обработки, когда сигнал STR1 запуска указывает «остановка». Модуль 21 обработки продолжает выполнять обработку, пока сигнал STR1 запуска указывает «запуск», и находится в состоянии остановки, пока стартовый сигнал STR1 указывает «остановка». В настоящем варианте осуществления сигнал STR1 запуска указывает «запуск», когда уровень напряжения сигнала STR1 запуска является низким уровнем, и сигнал STR1 запуска указывает «остановка», когда уровень напряжения сигнала STR1 запуска является высоким уровнем. Модуль 21 обработки может принимать сигнал STR1 запуска через оптопару, предусмотренную внутри модуля 21 обработки. В этом случае входной вывод оптопары, который принимает сигнал STR1 запуска, подключен к напряжению источника питания внутри модуля 21 обработки.
[0042] Модуль 21 обработки передает команду проецирования света в модуль 10 обнаружения для направления лазерного света L1 в область Rd обнаружения. Модуль 21 обработки передает в модуль 10 обнаружения команду относительно скорости вращения многоугольного зеркала 12a, скорости вращения (поворота) поворотного зеркала 13a и т.д. Модуль 21 обработки принимает принятый световой сигнал, сформированный на основе отраженного света L2 из области Rd обнаружения, из модуля 10 обнаружения. Как описано выше, область Rd обнаружения включает в себя область Rm мониторинга, заданную в пределах железнодорожного переезда RC, и отражатель 52 (зеркальную поверхность 52a). В модуле 21 обработки предварительно задаются положение области Rm мониторинга в области Rd обнаружения и положение зеркальной поверхности 52a.
[0043] Модуль 21 обработки определяет, присутствует ли препятствие в области Rm мониторинга, на основе отраженного света L2 из области Rm мониторинга. В частности, модуль 21 обработки вычисляет расстояние от модуля 10 обнаружения до каждой точки в области Rm мониторинга на основе положения излучения лазерного света L1 и принятого светового сигнала, сгенерированного на основе отраженного света L2 из области Rm мониторинга. Расстояние вычисляется в виде временного интервала между моментом времени, когда передается команда проецирования света, и моментом времени, когда принимается принятый световой сигнал. Затем модуль 21 обработки генерирует данные трехмерного пространства, указывающие трехмерную форму области Rm мониторинга, исходя из расстояния до каждой точки в области Rm мониторинга, и выполняет распознавание объекта с использованием этих данных трехмерного пространства. Модуль 21 обработки определяет, является ли распознанный объект препятствием, используя условие определения, такое как предупреждение о железнодорожном переезде.
[0044] Модуль 21 обработки выводит сигнал ER1 препятствия, указывающий на присутствие/отсутствие препятствия, в модуль 30 ввода/вывода на основе результата определения присутствия/отсутствия препятствия. В настоящем варианте осуществления модуль 21 обработки устанавливает сигнал ER1 препятствия во включенное состояние при определении, что препятствие отсутствует, и устанавливает сигнал ER1 препятствия в выключенное состояние при определении, что препятствие присутствует. Сигнал ER1 препятствия является сигналом электрического тока, причем электрический ток подается, когда сигнал ER1 препятствия находится во включенном состоянии, и электрический ток не подается, когда сигнал ER1 препятствия находится в выключенном состоянии. Модуль 21 обработки может устанавливать состояние (включенное состояние или выключенное состояние) сигнала ER1 препятствия, например, используя оптопару, предусмотренную внутри модуля 21 обработки.
[0045] Модуль 21 обработки определяет состояние окружающей среды в пределах железнодорожного переезда RC на основе отраженного света L2, отраженного отражателем 52 (зеркальной поверхностью 52a). В частности, модуль 21 обработки сравнивает интенсивность (принятый световой сигнал) отраженного света L2, отраженного отражателем 52, с пороговым значением для окружающей среды. Пороговое значение для окружающей среды предварительно задается в модуле 21 обработки. Пороговое значение для окружающей среды задается, например, равным интенсивности, которая делает невозможным обнаружение препятствия, имеющего самую низкую интенсивность отражения среди препятствий, подлежащих обнаружению. Например, когда установлена система 1 управления железнодорожным переездом, модуль 21 обработки управляет модулем 10 обнаружения для направления лазерного света L1 на отражатель 52 (зеркальную поверхность 52a). Модуль 21 обработки получает принятый световой сигнал, сгенерированный на основе отраженного света L2, отраженного отражателем 52, и устанавливает результат умножения принятого светового сигнала и заданного коэффициента в качестве порогового значения для окружающей среды в устройстве хранения (памяти). Модуль 21 обработки, например, определяет, что состояние окружающей среды является нормальным, когда интенсивность отраженного света L2 равна или больше порогового значения для окружающей среды, и определяет, что состояние окружающей среды является аномальным, когда интенсивность отраженного света L2 меньше порогового значения для окружающей среды.
[0046] Модуль 21 обработки выводит сигнал ENV1 окружающей среды, указывающий, является ли состояние окружающей среды нормальным или аномальным, в модуль 30 ввода/вывода на основе результата определения состояния окружающей среды. В настоящем варианте осуществления модуль 21 обработки устанавливает сигнал ENV1 окружающей среды во включенное состояние при определении, что состояние окружающей среды является нормальным, и устанавливает сигнал ENV1 окружающей среды в выключенное состояние при определении, что состояние окружающей среды является аномальным. Сигнал ENV1 окружающей среды является сигналом электрического тока, причем электрический ток подается, когда сигнал ENV1 окружающей среды находится во включенном состоянии, и электрический ток не подается, когда сигнал ENV1 окружающей среды находится в выключенном состоянии. Модуль 21 обработки может устанавливать состояние (включенное состояние или выключенное состояние) сигнала ENV1 окружающей среды, например, используя оптопару, предусмотренную внутри модуля 21 обработки.
[0047] Модуль 21 обработки определяет, произошел ли отказ системы 3 обнаружения препятствия. Примеры отказов системы 3 обнаружения препятствия включают в себя отказы каждой части, входящей в состав системы 3 обнаружения препятствия. Например, модуль 21 обработки определяет, произошел ли отказ модуля 10 обнаружения, на основе испущенного света, испущенного с другого конца 15b внутреннего оптического канала 15. В частности, модуль 21 обработки сравнивает интенсивность (принятый световой сигнал) испущенного света, испущенного другим концом 15b, с пороговым значением интенсивности. Пороговое значение интенсивности предварительно задается в модуле 21 обработки. Например, когда установлена система 1 управления железнодорожным переездом, модуль 21 обработки управляет блоком 10 обнаружения для направления лазерного света на один конец 15a внутреннего оптического канала 15. Модуль 21 обработки получает принятый световой сигнал, сгенерированный на основе испущенного света, испущенного другим концом 15b, и устанавливает результат умножения принятого светового сигнала и заданного коэффициента в качестве порогового значения интенсивности в устройстве хранения (памяти). Модуль 21 обработки, например, определяет, что отказ модуля 10 обнаружения не произошел (нормальное состояние), когда интенсивность испущенного света равна или выше порогового значения интенсивности, и определяет, что отказ модуля 10 обнаружения произошел, когда интенсивность испущенного света меньше порогового значения интенсивности.
[0048] Модуль 21 обработки выводит сигнал FAIL1 отказа, указывающий, произошел ли отказ системы 3 обнаружения препятствия, в модуль 30 ввода/вывода на основе результата определения отказа. В настоящем варианте осуществления блок 21 обработки устанавливает сигнал FAIL1 отказа во включенное состояние при определении, что система 3 обнаружения препятствия является нормально функционирующей, и устанавливает сигнал FAIL1 отказа в выключенное состояние при определении, что произошел отказ системы 3 обнаружения препятствия. Сигнал FAIL1 отказа является сигналом электрического тока, причем электрический ток подается, когда сигнал FAIL1 отказа находится во включенном состоянии, и электрический ток не подается, когда сигнал FAIL1 отказа находится в выключенном состоянии. Модуль 21 обработки может установить состояние (включенное состояние или выключенное состояние) сигнала FAIL1 отказа, например, используя оптопару, предусмотренную внутри модуля 21 обработки.
[0049] При определении, что отказ модуля 10 обнаружения (системы 3 обнаружения препятствия) не произошел, модуль 21 обработки может определять состояние окружающей среды и присутствие/отсутствие препятствия.
[0050] Модуль 22 обработки запускает различные части обработки, когда сигнал STR2 запуска, выводимый из модуля 30 ввода/вывода, указывает «запуск», и модуль 22 обработки останавливает различные части обработки, когда сигнал STR2 запуска указывает «остановка». Аналогично модулю 21 обработки модуль 22 обработки определяет присутствие/отсутствие препятствия, состояние окружающей среды и отказ системы 3 обнаружения препятствия. Модуль 22 обработки выводит сигнал ER2 препятствия, указывающий на присутствие/отсутствие препятствия, в модуль 30 ввода/вывода на основе результата определения присутствия/отсутствия препятствия. Модуль 22 обработки выводит сигнал ENV2 окружающей среды, указывающий, является ли состояние окружающей среды нормальным или аномальным, в модуль 30 ввода/вывода на основе результата определения состояния окружающей среды. Модуль 22 обработки выводит сигнал FAIL2 отказа, указывающий, произошел ли отказ системы 3 обнаружения препятствия, в модуль 30 ввода/вывода на основе результата определения отказа. Поскольку сигнал ER2 препятствия, сигнал ENV2 окружающей среды и сигнал FAIL2 отказа аналогичны сигналу ER1 препятствия, сигналу ENV1 окружающей среды и сигналу FAIL1 отказа, соответственно, их подробное описание не будет приведено.
[0051] Хотя модуль 22 обработки генерирует команду проецирования света и т.п. аналогично модулю 21 обработки, команда проецирования света и т.п. не передается в модуль 10 обнаружения.
[0052] Когда модуль 20 управления определяет, что произошел отказ системы 3 обнаружения препятствия, модуль 30 ввода/вывода выводит сигнал S3 состояния, указывающий на аномальное функционирование системы 3 обнаружения препятствия (отказ системы 3 обнаружения препятствия), в контроллер 2 железнодорожного переезда. Когда модуль 20 управления определяет, что отказ системы 3 обнаружения препятствия не произошел, модуль 30 ввода/вывода выводит сигнал S3 состояния, указывающий на нормальное функционирование системы 3 обнаружения препятствий, в контроллер 2 железнодорожного переезда.
[0053] В настоящем варианте осуществления, поскольку модуль 20 управления дублируется, когда по меньшей мере один из модуля 21 обработки и модуля 22 обработки определяет, что произошел отказ системы 3 обнаружения препятствия, модуль 30 ввода/вывода выводит сигнал S3 состояния, указывающий на аномальное функционирование системы 3 обнаружения препятствия, в контроллер 2 железнодорожного переезда. Другими словами, когда по меньшей мере один из сигнала FAIL1 отказа и сигнала FAIL2 отказа находится в выключенном состоянии, модуль 30 ввода/вывода выводит сигнал S3 состояния, указывающий на аномальное функционирование системы 3 обнаружения препятствия, в контроллер 2 железнодорожного переезда. Когда модуль 21 обработки и модуля 22 обработки оба определяют, что отказ системы 3 обнаружения препятствия не произошел, модуль 30 ввода/вывода выводит сигнал S3 состояния, указывающий на нормальное функционирование системы 3 обнаружения препятствий, в контроллер 2 железнодорожного переезда. Другими словами, когда сигнал FAIL1 отказа и сигнал FAIL2 отказа оба находятся во включенном состоянии, модуль 30 ввода/вывода выводит сигнал S3 состояния, указывающий на нормальное функционирование системы 3 обнаружения препятствия, в контроллер 2 железнодорожного переезда.
[0054] Когда модуль 20 управления определяет, что препятствие присутствует на железнодорожном переезде RC (в области Rm мониторинга), модуль 30 ввода/вывода выводит сигнал S2 присутствия/отсутствия препятствия, указывающий на присутствие препятствия, в контроллер 2 железнодорожного переезда. Когда модуль 20 управления определяет, что состояние окружающей среды является аномальным, модуль 30 ввода/вывода выводит сигнал S2 присутствия/отсутствия препятствия, указывающий на присутствие препятствия, в контроллер 2 железнодорожного переезда. Кроме того, когда модуль 20 управления определяет, что произошел отказ системы 3 обнаружения препятствий, модуль 30 ввода/вывода выводит сигнал S2 присутствия/отсутствия препятствия, указывающий на присутствие препятствия, в контроллер 2 железнодорожного переезда. Когда модуль 20 управления определяет, что на железнодорожном переезде RC (в области Rm мониторинга) отсутствует препятствие, что состояние окружающей среды является нормальным, и что отказ системы 3 обнаружения препятствия не произошел, модуль 30 ввода/вывода выводит сигнал S2 препятствия/отсутствия препятствия, указывающий на отсутствие препятствия, в контроллер 2 железнодорожного переезда.
[0055] В настоящем варианте осуществления, когда по меньшей мере один из модуля 21 обработки и модуля 22 обработки определяет, что препятствие присутствует, что состояние окружающей среды является аномальным или что произошел отказ системы 3 обнаружения препятствия, модуль 30 ввода/вывода выводит сигнал S2 присутствия/отсутствия препятствия, указывающий на присутствие препятствия, в контроллер 2 железнодорожного переезда. Другими словами, когда по меньшей мере один из сигналов ER1 и ER2 препятствия, сигналов ENV1 и ENV2 окружающей среды и сигналов FAIL1 и FAIL2 отказа находится в выключенном состоянии, модуль 30 ввода/вывода выводит сигнал S2 присутствия/отсутствия препятствия, указывающий на присутствие препятствия, в контроллер 2 железнодорожного переезда.
[0056] Когда модуль 21 обработки и модуль 22 обработки оба определяют, что препятствия отсутствует, что состояние окружающей среды является нормальным и что отказ системы 3 обнаружения препятствия не произошел, модуль 30 ввода/вывода выводит сигнал S2 присутствия/отсутствия препятствия, указывающий на отсутствие препятствия, в контроллер 2 железнодорожного переезда. Другими словами, когда все сигналы ER1 и ER2 препятствия, сигналы ENV1 и ENV2 окружающей среды и сигналы FAIL1 и FAIL2 отказа находятся во включенном состоянии, модуль 30 ввода/вывода выводит сигнал S2 присутствия/отсутствия препятствия, указывающий на отсутствие препятствия, в контроллер 2 железнодорожного переезда.
[0057] Кроме того, при выводе сигнала S3 состояния, указывающего на аномальное функционирование системы 3 обнаружения препятствия (отказ системы 3 обнаружения препятствия), в контроллер 2 железнодорожного переезда модуль 30 ввода/вывода выводит сигнал NEG выключения в выключатель 40 питания. В настоящем варианте осуществления, когда по меньшей мере один из модуля 21 обработки и модуля 22 обработки определяет, что произошел отказ системы 3 обнаружения препятствия, модуль 30 ввода/вывода выводит сигнал NEG выключения в выключатель 40 питания. Другими словами, когда по меньшей мере один из сигнала FAIL1 отказа и сигнала FAIL2 отказа находится в выключенном состоянии, модуль 30 ввода/вывода выводит сигнал NEG выключения в выключатель 40 питания.
[0058] Далее будет описан пример конфигурации схемы для реализации вышеупомянутой функции модуля 30 ввода/вывода. В настоящем варианте осуществления модуль 30 ввода/вывода выполнен в виде релейной схемы. На ФИГ. 5 каждое реле для удобства разделено на катушку индуктивности и переключатель.
[0059] Модуль 30 ввода/вывода имеет вывод T1a, вывод T1b, вывод T2a, вывод T2b, вывод T3a, вывод T3b, вывод T4a и вывод T4b. Вывод T1a и вывод T1b являются выводами для вывода сигнала S2 присутствия/отсутствия препятствия. Вывод T2a и вывод T2b являются выводами для вывода сигнала S3 состояния. Вывод T3a и вывод T3b являются выводами для вывода сигнала состояния окружающей среды. Вывод T4a и вывод T4b являются выводами для приема сигнала S1 запуска/остановки. Каждый из вывода T1a, вывода T1b, вывода T2a, вывода T2b, вывода T4a и вывода T4b соединен с контроллером 2 железнодорожного переезда через сигнальную линию. Поскольку никакая сигнальная линия не соединена с выводом T3a и выводом T3b, модуль 30 ввода/вывода не выводит сигнал состояния окружающей среды в контроллер 2 железнодорожного переезда.
[0060] Катушка Cer1 индуктивности и переключатель SWer1 составляют одно реле. Один конец катушки Cer1 индуктивности соединен с модулем 21 обработки, а другой конец катушки Cer1 индуктивности подключен к напряжению источника питания. Сигнал ER1 препятствия подается из модуля 21 обработки на катушку Cer1 индуктивности. Когда сигнал ER1 препятствия находится во включенном состоянии, электрический ток течет через катушку Cer1 индуктивности, и контакт переключателя SWer1 переключается. Когда сигнал ER1 препятствия находится в выключенном состоянии, электрический ток не течет через катушку Cer1 индуктивности. Переключатель SWer1 является переключателем с замыкающим контактом. Таким образом, когда сигнал ER1 препятствия находится во включенном состоянии, переключатель SWer1 находится во включенном состоянии, а когда сигнал ER1 препятствия находится в выключенном состоянии, переключатель SWer1 находится в выключенном состоянии.
[0061] Одно реле состоит из катушки Cfail1 индуктивности, переключателя SWfail1a, переключателя SWfail1b и переключателя SWfail1c. Один конец катушки Cfail1 индуктивности соединен с модулем 21 обработки, а другой конец катушки Cfail1 индуктивности подключен к напряжению источника напряжения. Сигнал FAIL1 отказа подается из модуля 21 обработки на катушку Cfail1 индуктивности. Когда сигнал FAIL1 отказа находится во включенном состоянии, электрический ток течет через катушку Cfail1 индуктивности, и контакты переключателей SWfail1a, SWfail1b и SWfail1c переключаются. Когда сигнал FAIL1 отказа находится в выключенном состоянии, электрический ток не течет через катушку Cfail1 индуктивности.
[0062] Оба переключателя SWfail1a и SWfail1b являются переключателями с замыкающим контактом. Таким образом, когда сигнал FAIL1 отказа находится во включенном состоянии, оба переключателя SWfail1a и SWfail1b находятся во включенном состоянии, и, когда сигнал FAIL1 отказа находится в выключенном состоянии, оба переключателя SWfail1a и SWfail1b находятся в выключенном состоянии. Переключатель SWfail1c является переключателем с размыкающим контактом. Таким образом, когда сигнал FAIL1 отказа находится во включенном состоянии, переключатель SWfail1c находится в выключенном состоянии, и, когда сигнал FAIL1 отказа находится в выключенном состоянии, переключатель SWfail1c находится во включенном состоянии.
[0063] Одно реле состоит из катушки Cenv1 индуктивности, переключателя SWenv1a и переключателя SWenv1b. Один конец катушки Cenv1 индуктивности соединен с модулем 21 обработки, а другой конец катушки Cenv1 индуктивности подключен к напряжению источника питания. Сигнал ENV1 окружающей среды подается из модуля 21 обработки на катушку Cenv1 индуктивности. Когда сигнал ENV1 окружающей среды находится во включенном состоянии, электрический ток течет через катушку Cenv1 индуктивности, и контакты переключателей SWenv1a и SWenv1b переключаются. Когда сигнал ENV1 окружающей среды находится в выключенном состоянии, электрический ток не течет через катушку Cenv1 индуктивности. Оба переключателя SWenv1a и SWenv1b являются переключателями с замыкающим контактом. Таким образом, когда сигнал ENV1 окружающей среды находится во включенном состоянии, оба переключателя SWenv1a и SWenv1b находятся во включенном состоянии, и, когда сигнал ENV1 окружающей среды находится в выключенном состоянии, оба переключателя SWenv1a и SWenv1b находятся в выключенном состоянии.
[0064] Катушка Cer2 индуктивности и переключатель SWer2 составляют одно реле. Один конец катушки Cer2 индуктивности соединен с модулем 22 обработки, а другой конец катушки Cer2 индуктивности подключен к напряжению источника питания. Сигнал ER2 препятствия подается из модуля 22 обработки на катушку Cer2 индуктивности. Когда сигнал ER2 препятствия находится во включенном состоянии, электрический ток течет через катушку Cer2 индуктивности, и контакт переключателя SWer2 переключается. Когда сигнал ER2 препятствия находится в выключенном состоянии, электрический ток не течет через катушку Cer2 индуктивности. Переключатель SWer2 является переключателем с замыкающим контактом. Таким образом, когда сигнал ER2 препятствия находится во включенном состоянии, переключатель SWer2 находится во включенном состоянии, и, когда сигнал ER2 препятствия находится в выключенном состоянии, переключатель SWer2 находится в выключенном состоянии.
[0065] Одно реле состоит из катушки Cfail2 индуктивности, переключателя SWfail2a, переключателя SWfail2b и переключателя SWfail2c. Один конец катушки Cfail2 индуктивности соединен с модулем 22 обработки, а другой конец катушки Cfail2 индуктивности подключен к напряжению источника питания. Сигнал FAIL2 отказа подается из модуля 22 обработки на катушку Cfail2 индуктивности. Когда сигнал FAIL2 отказа находится во включенном состоянии, электрический ток течет через катушку Cfail2 индуктивности, и контакты переключателей SWfail2a и SWfail2b переключаются. Когда сигнал FAIL2 отказа находится в выключенном состоянии, электрический ток не течет через катушку Cfail2 индуктивности.
[0066] Оба переключателя SWfail2a и SWfail2b являются переключателями с замыкающим контактом. Таким образом, когда сигнал FAIL2 отказа находится во включенном состоянии, оба переключателя SWfail2a и SWfail2b находятся во включенном состоянии, и, когда сигнал FAIL2 отказа находится в выключенном состоянии, оба переключателя SWfail2a и SWfail2b оба находятся в выключенном состоянии. Переключатель SWfail2c является переключателем с размыкающим контактом. Таким образом, когда сигнал FAIL2 отказа находится во включенном состоянии, переключатель SWfail2c находится в выключенном состоянии, и, когда сигнал FAIL2 отказа находится в выключенном состоянии, переключатель SWfail2c находится во включенном состоянии.
[0067] Одно реле состоит из катушки Cenv2 индуктивности, переключателя SWenv2a и переключателя SWenv2b. Один конец катушки Cenv2 индуктивности соединен с модулем 22 обработки, а другой конец катушки Cenv2 индуктивности подключен к напряжению источника питания. Сигнал ENV2 окружающей среды подается из модуля 22 обработки на катушку Cenv2 индуктивности. Когда сигнал ENV2 окружающей среды находится во включенном состоянии, электрический ток течет через катушку Cenv2 индуктивности, и контакты переключателей SWenv2a и SWenv2b переключаются. Когда сигнал ENV2 окружающей среды находится в выключенном состоянии, электрический ток не течет через катушку Cenv2 индуктивности. Оба переключателя SWenv2a и SWenv2b являются переключателями с замыкающим контактом. Таким образом, когда сигнал ENV2 окружающей среды находится во включенном состоянии, оба переключателя SWenv2a и SWenv2b находятся во включенном состоянии, и, когда сигнал ENV2 окружающей среды находится в выключенном состоянии, оба переключателя SWenv2a и SWenv2b находятся в выключенном состоянии.
[0068] Одно реле состоит из катушки Cstr индуктивности, переключателя SWstra и переключателя SWstrb. Один конец катушки Cstr индуктивности соединен с выводом T4a, а другой конец катушки Cstr индуктивности соединен с выводом T4b. Сигнал S1 запуска/остановки подается из контроллера 2 железнодорожного переезда на катушку Cstr индуктивности. Когда сигнал S1 запуска/остановки находится во включенном состоянии, электрический ток течет через катушку Cstr индуктивности, и контакты переключателей SWstra и SWstrb переключаются. Когда сигнал S1 запуска/остановки находится в выключенном состоянии, электрический ток не течет через катушку Cstr индуктивности. Оба переключателя SWstra и SWstrb являются переключателями с замыкающим контактом. Таким образом, когда сигнал S1 запуска/остановки находится во включенном состоянии, оба переключателя SWstra и SWstrb находятся во включенном состоянии, и, когда сигнал S1 запуска/остановки находится в выключенном состоянии, оба переключателя SWstra и SWstrb находятся в выключенном состоянии.
[0069] Модуль 30 ввода/вывода включает в себя интерфейсный модуль 31 для передачи сигналов контроллеру 2 железнодорожного переезда и приема сигналов от него, а также модуль 32 выключения для прекращения подачи электропитания. Интерфейсный модуль 31 включает в себя катушку Cstr индуктивности, схему 33 генерации, схему 34 генерации и схему 35 генерации.
[0070] Как описано выше, катушка Cstr индуктивности представляет собой схему, которая принимает сигнал S1 запуска/остановки. Один конец переключателя SWstra соединен с модулем 21 обработки, а другой конец переключателя SWstra подключен к потенциалу заземления. Один конец переключателя SWstrb соединен с модулем 22 обработки, а другой конец переключателя SWstrb подключен к потенциалу заземления. Таким образом, когда сигнал S1 запуска/остановки находится во включенном состоянии, оба переключателя SWstra и SWstrb находятся во включенном состоянии, так что уровни напряжения сигналов STR1 и STR2 запуска являются низкими уровнями, и сигналы STR1 и STR2 запуска указывают «запуск». С другой стороны, когда сигнал S1 запуска/остановки находится в выключенном состоянии, оба переключателя SWstra и SWstrb находятся в выключенном состоянии, так что уровни напряжения сигналов STR1 и STR2 запуска являются высокими уровнями, и сигналы STR1 и STR2 запуска указывают «остановка».
[0071] Схема 33 генерации представляет собой схему, которая генерирует сигнал S2 присутствия/отсутствия препятствия. Схема 33 генерации включает в себя переключатель SWer1, переключатель SWfail1a, переключатель SWenv1a, переключатель SWer2, переключатель SWfail2a и переключатель SWenv2a и представляет собой последовательную схему, в которой переключатель SWer1, переключатель SWfail1a, переключатель SWenv1a, переключатель SWenv2a, переключатель SWfail2a и переключатель SWer2 соединены последовательно в указанном порядке. Один вывод схемы 33 генерации (один вывод переключателя SWer1) соединен с выводом T1a, а другой вывод схемы 33 генерации (другой вывод переключателя SWer2) соединен с выводом T1b.
[0072] Когда все сигналы ENV1 и ENV2 окружающей среды, сигналы FAIL1 и FAIL2 отказа и сигналы ER1 и ER2 препятствия находятся во включенном состоянии, все переключатели SWer1, SWfail1a, SWenv1a, SWenv2a, SWfail2a и SWer2 находятся во включенном состоянии, так что достигается непрерывность (электрическое короткое замыкание) между выводом T1a и выводом T1b схемы 33 генерации. Как описано выше, когда достигается непрерывность (замкнутое состояние) между выводом T1a и выводом T1b, сигнал S2 присутствия/отсутствия препятствия указывает на отсутствие препятствия.
[0073] С другой стороны, когда по меньшей мере один из сигналов ENV1 и ENV2 окружающей среды, сигналов FAIL1 и FAIL2 отказа и сигналов ER1 и ER2 препятствия находится в выключенном состоянии, по меньшей мере один из переключателей SWer1, SWfail1a, SWenv1a, SWenv2a, SWfail2a и SWer2 находится в выключенном состоянии, так что схема 33 генерации прерывается, и вывод T1a и вывод T1b электрически отсоединяются друг от друга. Как описано выше, когда вывод T1a и вывод T1b отсоединены друг от друга (разомкнутое состояние), сигнал S2 присутствия/отсутствия препятствия указывает на присутствие препятствия.
[0074] Схема 34 генерации представляет собой схему, которая генерирует сигнал S3 состояния. Схема 34 генерации включает в себя переключатель SWfail1b и переключатель SWfail2b и является последовательной схемой, в которой переключатель SWfail1b и переключатель SWfail2b соединены последовательно в указанном порядке. Один вывод схемы 34 генерации (один вывод переключателя SWfail1b) соединен с выводом T2a, а другой вывод схемы 34 генерации (другой вывод переключателя SWfail2b) соединен с выводом T2b.
[0075] Когда оба сигнала FAIL1 и FAIL2 отказа находятся во включенном состоянии, переключатели SWfail1b и SWfail2b находятся во включенном состоянии, так что достигается непрерывность (электрическое короткое замыкание) между выводом T2a и выводом T2b схемы 34 генерации. Как описано выше, когда достигается непрерывность (замкнутое состояние) между выводом T2a и выводом T2b, сигнал S3 состояния указывает, что состояние системы 3 обнаружения препятствия является нормальным. С другой стороны, когда по меньшей мере один из сигналов FAIL1 и FAIL2 отказа находится в выключенном состоянии, по меньшей мере один из переключателей SWfail1b и SWfail2b находится в выключенном состоянии, так что схема 34 генерации прерывается, и вывод T2a и вывод T2b электрически отсоединяются друг от друга. Как описано выше, когда вывод T2a и вывод T2b отсоединены друг от друга (разомкнутое состояние), сигнал S3 состояния указывает, что состояние системы 3 обнаружения препятствия является аномальным.
[0076] Схема 35 генерации представляет собой схему, которая генерирует сигнал состояния окружающей среды. Схема 35 генерации включает в себя переключатель SWenv1b и переключатель SWenv2b и представляет собой последовательную схему, в которой переключатель SWenv1b и переключатель SWenv2b соединены последовательно в указанном порядке. Один конец схемы 35 генерации (один конец переключателя SWenv1b) соединен с выводом T3a, а другой конец схемы 35 генерации (другой конец переключателя SWenv2b) соединен с выводом T3b.
[0077] Когда оба сигнала ENV1 и ENV2 окружающей среды находятся во включенном состоянии, оба переключателя SWenv1b и SWenv2b находятся во включенном состоянии, так что достигается непрерывность (электрическое короткое замыкание) между выводом T3a и выводом T3b схемы 35 генерации. Как описано выше, когда достигается непрерывность (замкнутое состояние) между выводом T3a и выводом T3b, сигнал состояния окружающей среды указывает, что состояние окружающей среды в пределах железнодорожного переезда RC является нормальным. С другой стороны, когда по меньшей мере один из сигналов ENV1 и ENV2 окружающей среды находится в выключенном состоянии, по меньшей мере один из переключателей SWenv1b и SWenv2b находится в выключенном состоянии, так что схема 35 генерации прерывается, и вывод T3a и вывод T3b электрически отсоединяются друг от друга. Как описано выше, когда вывод T3a и вывод T3b отсоединены друг от друга (разомкнутое состояние), сигнал состояния окружающей среды указывает, что состояние окружающей среды в пределах железнодорожного переезда RC является аномальным.
[0078] Модуль 32 выключения включает в себя катушку Cneg индуктивности, переключатель SWneg, переключатель SWfail1c и переключатель SWfail2c. Переключатель SWfail1c и переключатель SWfail2c соединены параллельно, одни концы переключателя SWfail1c и переключателя SWfail2c подключены к напряжению источника питания, а другие концы переключателя SWfail1c и переключателя SWfail2c подключены к потенциалу заземления через катушку Cneg индуктивности. Один конец переключателя SWneg подключен к напряжению источника питания, а другой конец переключателя SWneg соединен с выключателем 40 питания. Катушка Cneg индуктивности и переключатель SWneg составляют одно реле. Когда электрический ток течет через катушку Cneg индуктивности, контакт переключателя SWneg переключается. Переключатель SWneg представляет собой переключатель с замыкающим контактом.
[0079] Когда оба сигнала FAIL1 и FAIL2 отказа находятся во включенном состоянии, переключатели SWfail1c и SWfail2c находятся в выключенном состоянии, так что электрический ток не течет через катушку Cneg индуктивности, а переключатель SWneg находится в выключенном состоянии. Таким образом, сигнал NEG выключения не подается на выключатель 40 питания. С другой стороны, когда по меньшей мере один из сигналов FAIL1 и FAIL2 отказа находится в выключенном состоянии, по меньшей мере один из переключателей SWfail1c и SWfail2c находится во включенном состоянии, так что электрический ток течет через катушку Cneg индуктивности, а переключатель SWneg переходит во включенное состояние. Как следствие, сигнал NEG выключения подается на выключатель 40 питания. Другими словами, когда по меньшей мере один из модуля 21 обработки и модуля 22 обработки определяет, что произошел отказ системы 3 обнаружения препятствия, выключатель 40 питания переключается в выключенное положение.
[0080] В системе 3 обнаружения препятствий, сконфигурированной, как описано выше, сигнал S1 запуска/остановки, указывающий «запуск», выводится из контроллера 2 железнодорожного переезда, посредством чего начинается обработка, связанная с обнаружением препятствия в пределах железнодорожного переезда RC. В частности, модуль 10 обнаружения направляет лазерный свет L1 в область Rd обнаружения, чтобы сканировать область Rd обнаружения в направлении основного сканирования и направлении вспомогательного сканирования, и принимает отраженный свет L2 из области Rd обнаружения. Область Rd обнаружения включает в себя область Rm мониторинга, заданную в пределах железнодорожного переезда RC, и отражатель 52 (зеркальную поверхность 52a). Модуль 20 управления определяет на основе отраженного света L2, отраженного областью Rm мониторинга, присутствует ли препятствие в области Rm мониторинга, и определяет состояние окружающей среды в пределах железнодорожного переезда RC на основе отраженного света L2, отраженного зеркальной поверхностью 52а. Модуль 10 обнаружения позволяет лазерному свету, отраженному многоугольным зеркалом 12a, проходить через один конец 15a внутреннего оптического канала 15, и принимает испущенный свет, испущенный другим концом 15b, светопринимающим элементом 14b. Модуль 20 управления определяет, произошел ли отказ модуля 10 обнаружения, на основе испущенного света.
[0081] Когда модуль 20 управления определяет, что произошел отказ системы 3 обнаружения препятствия, модуль 30 ввода/вывода выводит сигнал S3 состояния, указывающий на аномальное функционирование системы 3 обнаружения препятствия (отказ системы 3 обнаружения препятствия), в контроллер 2 железнодорожного переезда. Когда модуль 20 управления определяет, что присутствует препятствие, что состояние окружающей среды является аномальным, или что система 3 обнаружения препятствия является аномально функционирующей, модуль 30 ввода/вывода выводит сигнал S2 присутствия/отсутствия препятствия, указывающий на присутствие препятствия, в контроллер 2 железнодорожного переезда.
[0082] Как описано выше, в системе 3 обнаружения препятствия в случае, когда лазерный свет L1 направляется на отражатель 52 (зеркальную поверхность 52a), установленный на железнодорожном переезде RC, состояние окружающей среды в пределах железнодорожного переезда RC определяется на основе отраженного света L2, соответствующего лазерному свету L1, и состояние окружающей среды определяется как аномальное, сигнал S2 присутствия/отсутствия препятствия, указывающий на присутствие препятствия, выводится в контроллер 2 железнодорожного переезда. Как описано выше, аномальность состояния окружающей среды выводится в контроллер 2 железнодорожного переезда в качестве присутствия препятствия, а не в качестве отказа системы 3 обнаружения препятствия. Когда выводится сигнал S2 присутствия/отсутствия препятствия, не требуется прекращать подачу электропитания в систему 3 обнаружения препятствия, так что система 3 обнаружения препятствия может продолжать функционировать, даже когда ухудшается состояние окружающей среды в пределах железнодорожного переезда RC.
[0083] Область Rd обнаружения включает в себя область Rm мониторинга и отражатель 52. Таким образом, применяя лазерный свет L1 для сканирования области Rd обнаружения, можно определить присутствие/отсутствие препятствия и состояние окружающей среды в пределах железнодорожного переезда RC.
[0084] Модуль 10 обнаружения имеет внутренний оптический канал 15, способный распространять лазерный свет, позволяет лазерному свету входить через один конец 15a внутреннего оптического канала 15 и принимает испущенный свет, испущенный другим концом 15b внутреннего оптического канала 15. Модуль 20 управления определяет, произошел ли отказ модуля 10 обнаружения, на основе испущенного света. Как следствие, можно определить отказ модуля 10 обнаружения, например, вследствие недостаточной интенсивности лазерного света.
[0085] Когда произошел отказ модуля 10 обнаружения, модуль 10 обнаружения может быть не способен точно определять состояние окружающей среды в пределах железнодорожного переезда RC. Таким образом, когда определено, что отказ модуля 10 обнаружения не произошел, определяется состояние окружающей среды в пределах железнодорожного переезда RC, так что можно повысить точность определения состояния окружающей среды в пределах железнодорожного переезда RC.
[0086] Когда модуль 20 управления определяет, что произошел отказ системы 3 обнаружения препятствия, модуль 30 ввода/вывода выводит наружу сигнал S3 состояния, указывающий на аномальность состояния системы 3 обнаружения препятствия (отказ системы 3 обнаружения препятствия). Следовательно, об отказе системы 3 обнаружения препятствия можно уведомить контроллер 2 железнодорожного переезда.
[0087] Когда состояние системы 3 обнаружения препятствия является аномальным, система 3 обнаружения препятствия может функционировать неправильно. С другой стороны, выключатель 40 питания переключается в выключенное состояние, когда модуль 30 ввода/вывода выводит сигнал S3 состояния, указывающий на аномальность состояния системы 3 обнаружения препятствия (отказ системы 3 обнаружения препятствия), и прекращается подача электропитания в систему 3 обнаружения препятствия. Таким образом, можно предотвратить неправильное функционирование системы 3 обнаружения препятствия.
[0088] Система обнаружения препятствия согласно настоящему изобретению не ограничена вышеописанным вариантом осуществления.
[0089] Например, система 3 обнаружения препятствия может включать в себя модуль обнаружения, который направляет лазерный свет на отражатель 52 и принимает отраженный свет, в дополнение к модулю 10 обнаружения.
[0090] Поскольку система 3 обнаружения препятствия не выводит сигнал состояния окружающей среды в контроллер 2 железнодорожного переезда, схема 35 генерации и выводы T3a и T3b могут быть исключены. Следовательно, система 3 обнаружения препятствия может быть упрощена.
[0091] Модуль 20 управления не должен дублироваться и не должен включать в себя модуль 22 обработки.
[0092] Модуль 30 ввода/вывода не ограничен конфигурацией схемы, показанной на ФИГ. 5. Функцию модуля 30 ввода/вывода можно реализовать с помощью логической схемы или программного обеспечения.
[0093] В вышеописанном варианте осуществления, хотя модуль 10 обнаружения, модуль 20 управления и модуль 30 ввода/вывода выполнены отдельными, модуль 10 обнаружения, модуль 20 управления и модуль 30 ввода/вывода могут быть объединены в одно целое.
Список ссылочных обозначений
[0094] 1 Система управления железнодорожным переездом
2 Контроллер железнодорожного переезда (снаружи)
3 Система обнаружения препятствия
10 Модуль обнаружения
15 Внутренний оптический канал (внутренний канал)
15а Один конец (первый конец)
15b Другой конец (второй конец)
20 Модуль управления
21 Модуль обработки
22 Модуль обработки
30 Модуль ввода/вывода (модуль вывода)
40 Выключатель питания
52 Отражатель
52a Зеркальная поверхность
L1 Лазерный свет (электромагнитная волна)
L2 Отраженный свет (отраженная волна)
PS Источник питания
RC Железнодорожный переезд
Rd Область обнаружения
Rm Область мониторинга
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА УПРАВЛЕНИЯ ОСВЕЩЕНИЕМ | 2010 |
|
RU2561494C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО КОНТРОЛЯ СВОБОДНОСТИ ЗОНЫ ПЕРЕЕЗДА | 2020 |
|
RU2751041C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ОРИЕНТИРОВАНИЯ ИНВАЛИДОВ ПО ЗРЕНИЮ В ЗАМКНУТОМ И ОТКРЫТОМ ПРОСТРАНСТВАХ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2019 |
|
RU2737914C2 |
| Способ и система для обнаружения опасных веществ, находящихся в вагонах грузовых поездов с использованием метода меченых нейтронов | 2018 |
|
RU2690041C1 |
| УСТРОЙСТВО ДЛЯ ОГРАЖДЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПЕРЕЕЗДА | 1992 |
|
RU2066649C1 |
| ЗАКРЕПЛЯЕМОЕ НА ГОЛОВЕ УСТРОЙСТВО ОТОБРАЖЕНИЯ И СПОСОБ УПРАВЛЕНИЯ ЗАКРЕПЛЯЕМЫМ НА ГОЛОВЕ УСТРОЙСТВОМ ОТОБРАЖЕНИЯ | 2014 |
|
RU2632257C2 |
| Лидарная система и способ с когерентным детектированием | 2020 |
|
RU2792949C2 |
| АППАРАТ, СИСТЕМА И СПОСОБ | 2015 |
|
RU2697980C2 |
| Лазерная система предупреждения о столкновении | 2024 |
|
RU2833732C1 |
| СИСТЕМА КОДИРОВАННЫХ ПРЕДУПРЕЖДЕНИЙ ДЛЯ ОСВЕТИТЕЛЬНЫХ УСТРОЙСТВ | 2010 |
|
RU2536702C2 |



Изобретение относится к средствам обнаружения препятствий в пределах железнодорожного переезда. Система включает в себя модуль обнаружения, выполненный с возможностью направления электромагнитной волны на отражатель, установленный на железнодорожном переезде, и приема отраженной волны, соответствующей электромагнитной волне; модуль управления, выполненный с возможностью определения состояния окружающей среды в пределах железнодорожного переезда на основе отраженной волны; и модуль вывода, выполненный с возможностью вывода наружу сигнала присутствия/отсутствия препятствия, указывающего на присутствие препятствия, когда модуль управления определяет, что состояние окружающей среды является аномальным. Причем модуль обнаружения имеет внутренний канал, выполненный с возможностью распространения электромагнитной волны; модуль обнаружения обеспечивает возможность вхождения электромагнитной волны через первый конец внутреннего канала и выполнен с возможностью приема испущенной волны, испущенной вторым концом внутреннего канала; а модуль управления выполнен с возможностью определения, произошел ли отказ модуля обнаружения, на основе испущенной волны. Достигается повышение надежности обнаружения препятствия. 5 з.п. ф-лы, 5 ил. 
1. Система обнаружения препятствия для обнаружения препятствия в пределах железнодорожного переезда, содержащая: модуль обнаружения, выполненный с возможностью направления электромагнитной волны на отражатель, установленный на железнодорожном переезде, и приема отраженной волны, соответствующей электромагнитной волне; модуль управления, выполненный с возможностью определения состояния окружающей среды в пределах железнодорожного переезда на основе отраженной волны; и модуль вывода, выполненный с возможностью вывода наружу сигнала присутствия/отсутствия препятствия, указывающего на присутствие препятствия, когда модуль управления определяет, что состояние окружающей среды является аномальным, причем модуль обнаружения имеет внутренний канал, выполненный с возможностью распространения электромагнитной волны; модуль обнаружения обеспечивает возможность вхождения электромагнитной волны через первый конец внутреннего канала и выполнен с возможностью приема испущенной волны, испущенной вторым концом внутреннего канала; а модуль управления выполнен с возможностью определения, произошел ли отказ модуля обнаружения, на основе испущенной волны.
2. Система обнаружения препятствия по п.1, в которой модуль обнаружения выполнен с возможностью направления электромагнитной волны в область обнаружения, включающую в себя область мониторинга, заданную в пределах железнодорожного переезда, и отражатель для сканирования области обнаружения, и с возможностью приема отраженной волны; модуль управления выполнен с возможностью определения, присутствует ли препятствие в области мониторинга, на основе отраженной волны из области мониторинга; а модуль вывода выполнен с возможностью вывода сигнала присутствия/отсутствия препятствия, когда модуль управления определяет, что присутствует препятствие.
3. Система обнаружения препятствия по п.1, в которой модуль управления выполнен с возможностью определения состояния окружающей среды при определении, что отказ модуля обнаружения не произошел.
4. Система обнаружения препятствия по любому из пп.1-3, в которой модуль управления выполнен с возможностью определения, произошел ли отказ системы обнаружения препятствия; и когда модуль управления определяет, что произошел отказ системы обнаружения препятствия, модуль вывода выполнен с возможностью вывода наружу сигнала состояния, указывающего на отказ системы обнаружения препятствия.
5. Система обнаружения препятствия по п.4, дополнительно содержащая выключатель питания для переключения между включенным состоянием, в котором электропитание подается в систему обнаружения препятствия, и выключенным состоянием, в котором прекращена подача электропитания в систему обнаружения препятствия, при этом выключатель питания переключается в выключенное состояние, когда модуль вывода выводит сигнал состояния.
6. Система обнаружения препятствия по любому из пп.1-5, в которой модуль обнаружения выполнен с возможностью испускания лазерного света в качестве электромагнитной волны.
| JP 2017154528 A, 07.09.2017 | |||
| JP 2012237724 A, 06.12.2012 | |||
| JP 2005121488 A, 12.05.2005 | |||
| JP S 6040978 A, 04.03.1985 | |||
| JP 2000008184 A, 17.01.2000 | |||
| JP 2001030906 A, 06.02.2001. |

