Область техники, к которой относится изобретение
[001] Настоящая технология относится к световым системам обнаружения и определения дальности (LiDAR, Light Detection and Ranging) в целом и, в частности, к системам и способам сканирования окружающей среды с использованием когерентного детектирования.
Уровень техники
[002] Лидарные системы (световые системы обнаружения и определения дальности), также называемые лидарами, широко используются в беспилотных (автономных) транспортных средствах. Лидарные системы позволяют измерять расстояния между системой и окружающими объектами, освещая окружающую среду светом и собирая свет, отраженный от одного или нескольких объектов в окружающем пространстве.
[003] В типичной лидарной системе с измерением времени пролета (ToF, Time of Flight) источник света испускает несколько импульсов узких лазерных лучей в поле обзора. Свет, отраженный и/или рассеянный от объекта в поле обзора, принимается блоком обнаружения лидарной системы для определения положения этого объекта. Для таких систем ToF расстояние до объекта определяется путем измерения промежутка времени между моментом излучения светового луча и моментом обнаружения отраженного и/или рассеянного светового луча.
[004] Отраженные лучи, полученные лидаром, обрабатываются с целью формирования точек данных с помощью центрального компьютера, причем каждый импульс луча соответствует одной точке данных в облаке точек, представляющем окружающие объекты в виде 3D-карты. Трехмерная карта оказывается более или менее подробной и точной в зависимости от плотности или частоты обновления облака точек. Как правило, чем выше частота выборки в поле обзора, тем более детальной и точной является трехмерная карта.
[005] В зависимости от различных факторов окружения транспортного средства, сканируемого лидарной системой (например, от условий окружающей среды), отраженный и рассеянный свет, обнаруживаемый при измерении расстояния до окружающих объектов, иногда может быть слабым. Обработка слабых сигналов затрудняется из-за шума на 3D-карте или ложного обнаружения. В некоторых случаях мощность световых импульсов, излучаемых системой (т.е. освещенность или интенсивность), может быть увеличена, но максимальная мощность излучаемых световых импульсов ограничена, например, из соображений безопасности для глаз людей. Кроме того, повышение выходной мощности не всегда устраняет проблемы с шумом.
Раскрытие изобретения
[006] Таким образом, существует потребность в системах и способах, позволяющих обойти, уменьшить или преодолеть ограничения предшествующего уровня техники.
[007] В соответствии с широкими аспектами настоящей технологии реализована лидарная система с измерением времени пролета, использующая когерентное детектирование для улучшенного сканирования окружающей среды. Для усиления слабых отраженных или рассеянных сигналов из окружающей среды в лидарной системе в по меньшей мере некоторых не имеющих ограничительного характера вариантах реализации настоящей технологии часть лазерного света в узком диапазоне длин волн, создаваемого источником света лидарной системы, направляется в блок обнаружения для оптического взаимодействия с отраженными от окружающих объектов сигналами с целью обнаружения слабых входящих сигналов методом когерентного детектирования. В частности, непрерывный волновой световой луч, излучаемый источником света, разделяется модулем быстрого переключения (например, акустооптическим модулятором или электрооптическим модулятором) на два луча - первый луч представляет собой узкие световые импульсы, а второй луч представляет собой остаточный исходный световой луч (за вычетом импульсов, направленных в первый луч). Первым лучом импульсов блок сканирования сканирует поле обзора системы. Второй луч направляется в блок обнаружения, где он взаимодействует с входящим лучом света, отраженным от окружающих объектов. Затем слабые сигналы могут быть обнаружены в блоке обнаружения путем измерения интерференционного сигнала в детекторе с использованием обычных методов когерентного (гетеродинного или гомодинного) детектирования. Таким образом могут обнаруживаться более слабые отраженные сигналы за счет снижения уровня шума в данных без необходимости чрезмерного увеличения мощности выходного луча.
[008] В соответствии с первым широким аспектом настоящей технологии реализована лидарная система с измерением времени пролета, содержащая лазерный источник, выполненный с возможностью излучать световой луч в узкополосном диапазоне, модуль быстрого переключения, выполненный с возможностью принимать световой луч от лазерного источника и модулировать амплитуду светового луча для излучения коротких импульсов светового луча по первому оптическому пути и остаточного света светового луча по второму оптическому пути, блок сканирования, расположенный на первом оптическом пути и выполненный с возможностью сканировать короткими импульсами светового луча в направлении от системы к окружающим объектам, по меньшей мере один оптический элемент, выполненный с возможностью объединять в один сигнал остаточный свет светового луча во втором оптическом пути и сигнал, отраженный в систему от окружающих объектов, блок обнаружения, выполненный с возможностью принимать этот объединенный сигнал, и контроллер, соединенный с возможностью связи с блоком обнаружения и выполненный с возможностью обрабатывать электронные сигналы от блока обнаружения, полученные из объединенного сигнала, и определять расстояние до по меньшей мере одного из окружающих объектов на основе времени пролета, вычисленного при обработке электронных сигналов, полученных из объединенного сигнала.
[009] В некоторых вариантах осуществления по меньшей мере один оптический элемент является светоделителем.
[010] В некоторых вариантах осуществления модуль быстрого переключения является акустооптическим модулятором.
[011] В некоторых вариантах осуществления контроллер определяет время пролета методом гетеродинного детектирования.
[012] В некоторых вариантах осуществления система представляет собой волоконно-оптическую систему, а по меньшей мере один оптический элемент является волоконно-оптическим разветвителем.
[013] В некоторых вариантах осуществления блок обнаружения содержит фотодетектор, соединенный с возможностью связи с контроллером.
[014] В некоторых вариантах осуществления блок обнаружения содержит первый фотодетектор и второй фотодетектор, каждый из которых способен принимать по меньшей мере часть объединенного сигнала.
[015] В некоторых вариантах осуществления система дополнительно содержит оптический усилитель, функционально расположенный между модулем быстрого переключения и блоком сканирования и выполненный с возможностью усиливать интенсивность коротких импульсов светового луча.
[016] В некоторых вариантах осуществления модуль быстрого переключения является электрооптическим модулятором.
[017] В соответствии со вторым широким аспектом настоящей технологии реализован способ управления оптической системой, включающий в себя инициирование контроллером лазерного источника излучать световой луч в узкополосном диапазоне; управление с помощью контроллера модулем быстрого переключения для модуляции амплитуды светового луча, испускаемого в по меньшей мере двух направлениях - коротких импульсов светового луча и остаточного света светового луча, инициирование контроллером блока сканирования сканировать короткими импульсами светового луча в направлении от системы к окружающим объектам, прием контроллером электронных сигналов от блока обнаружения, принимающего объединенный сигнал, являющийся комбинацией остаточного света светового луча от источника света и сигнала, отраженного в систему от окружающих объектов, и определение контроллером расстояния до по меньшей мере одного из окружающих объектов на основе времени пролета, вычисленного при обработке электронных сигналов, полученных из объединенного сигнала.
[018] В некоторых вариантах осуществления управление модулем быстрого переключения включает в себя управление акустооптическим модулятором со стороны контроллера.
[019] В некоторых вариантах осуществления определение контроллером времени пролета включает в себя определение времени пролета методом гетеродинного детектирования.
[020] В некоторых вариантах осуществления способ дополнительно включает в себя инициирование контроллером усиления интенсивности коротких импульсов светового луча оптическим усилителем, причем этот оптический усилитель функционально размещается между модулем быстрого переключения и блоком сканирования.
[021] В контексте настоящего описания термин «источник света» в широком смысле относится к любому устройству для испускания излучения, такого как излучаемый сигнал в виде луча, например, луча света, включая излучение на одной или нескольких соответствующих длинах волн в электромагнитном спектре. В одном из примеров источником света может быть лазер. Таким образом, источник света может содержать лазер, такой как твердотельный лазер, лазерный диод, лазер высокой мощности, или альтернативный источник света, такой как источник света на основе светоизлучающих диодов (LED). Некоторые не имеющие ограничительного характера примеры лазерного источника включают в себя лазеры с достаточно узким спектром излучения, лазерный диод Фабри-Перо (Fabry-Perot), лазер с квантовыми ямами, лазер с распределенным брэгговским отражателем (DBR), лазер с распределенной обратной связью (DFB), волоконно-оптический лазер или лазер поверхностного излучения с вертикальным резонатором (VCSEL). В некоторых неограничивающих примерах лазерный источник может содержать лазерный диод, излучающий свет с длиной волны от приблизительно 650 нм до приблизительно 1150 нм. Кроме того, источник света может содержать лазерный диод, излучающий световые лучи с длиной волны от приблизительно 800 нм до приблизительно 1000 нм, от приблизительно 850 нм до приблизительно 950 нм, от приблизительно 1300 нм до приблизительно 1600 нм или в любом другом подходящем диапазоне. Если не указано иное, термин «приблизительно» применительно к числовому значению определяется как отклонение до 10% от указанного значения.
[022] В контексте настоящего описания «выходной луч» может также называться испускаемым лучом, таким как луч света, формируемый источником излучения и направляемый от источника в интересующую область. Выходной луч может иметь один или несколько параметров, например, длительность луча, угловую дисперсию луча, длину волны, мгновенную мощность, плотность фотонов на разных расстояниях от источника света, среднюю мощность, интенсивность мощности луча, ширину луча, частоту повторения луча, последовательность лучей, рабочий цикл импульса, длину волны, фазу и т.д. Выходной луч может быть неполяризованным или случайно поляризованным, может не иметь определенной или фиксированной поляризации (например, поляризация может меняться со временем) или может иметь определенную поляризацию (например, линейную, эллиптическую или круговую поляризацию).
[023] В контексте настоящего описания «входной луч» представляет собой излучение или свет, обычно попадающий в систему после отражения от одного или нескольких объектов в интересующей области. Входной луч также может называться испускаемым лучом или лучом света. Под отражением подразумевается, что по меньшей мере часть выходного луча, падающего на один или несколько объектов в интересующей области, отражается от этого одного или нескольких объектов. Входной луч может иметь один или несколько параметров, например, время пролета (время от момента излучения до момента приема), мгновенную мощность (например, сигнатуру мощности), среднюю мощность во всем отраженном импульсе, распределение фотонов в сигнале за период обратного импульса и т.д. В зависимости от конкретной реализации, излучение или свет, собранный во входном луче, может происходить от источников, отличных от источника отраженного выходного луча. Например, некоторая часть входного луча может содержать световой шум из окружающей среды (включая рассеянный солнечный свет) или от других источников света, внешних по отношению к данной системе.
[024] В контексте настоящего описания термин «окружение» транспортного средства относится к площади или объему вокруг этого транспортного средства, включая часть его текущего окружения, доступную для сканирования с использованием одного или нескольких датчиков, установленных на этом транспортном средстве, например, для создания трехмерной карты такого окружения или для обнаружения в нем объектов.
[025] В контексте настоящего описания «интересующая область» может в широком смысле включать в себя часть наблюдаемого окружения лидарной системы, в которой могут быть обнаружены один или несколько объектов. Следует отметить, что на интересующую область вокруг лидарной системы могут влиять различные условия, такие как ориентация лидарной системы (например, направление оптической оси лидарной системы), положение лидарной системы по отношению к окружающей среде (например, высота над землей, рельеф окружающей местности и препятствия), рабочие параметры лидарной системы (например, мощность излучения, параметры вычислений, определенные рабочие углы) и т.д. Интересующая область лидарной системы может быть определена, например, путем задания угла или телесного угла. В одном из примеров интересующая область также может быть определена в пределах заданного диапазона дальности (например, до 200 м).
[026] В контексте настоящего описания термин «сервер» означает компьютерную программу, выполняемую соответствующими аппаратными средствами и способную принимать запросы (например, от электронных устройств) через сеть и выполнять эти запросы или инициировать их выполнение. Соответствующие аппаратные средства могут быть реализованы в виде одного физического компьютера или одной компьютерной системы, что не существенно для настоящей технологии. В настоящем контексте выражение «сервер» не означает, что каждая задача (например, принятая команда или запрос) или некоторая определенная задача принимается, выполняется или инициируется одним и тем же сервером (т.е. одними и теми же программными и/или аппаратными средствами). Это выражение означает, что любое количество программных средств или аппаратных средств может принимать, отправлять, выполнять или инициировать выполнение любой задачи или запроса либо результатов любых задач или запросов. Все эти программные и аппаратные средства могут представлять собой один сервер или несколько серверов, причем оба эти случая подразумеваются в выражении «по меньшей мере один сервер».
[027] В контексте настоящего описания термин «электронное устройство» означает любое компьютерное аппаратное средство, способное выполнять программы, подходящие для решения поставленной задачи. В контексте настоящего описания термин «электронное устройство» подразумевает, что устройство может функционировать в качестве сервера для других электронных устройств, но это не обязательно для настоящей технологии. Таким образом, некоторые (не имеющие ограничительного характера) примеры электронных устройств включают в себя устройства для автономного вождения, персональные компьютеры (настольные, ноутбуки, нетбуки и т.п.), смартфоны и планшеты, а также сетевое оборудование, такое как маршрутизаторы, коммутаторы и шлюзы. Должно быть понятно, что в настоящем контексте тот факт, что устройство функционирует в качестве электронного устройства, не означает, что оно не может функционировать в качестве сервера для других электронных устройств.
[028] В контексте настоящего описания выражение «информация» включает в себя информацию любого рода или вида, допускающую хранение в базе данных. Такая информация включает в себя, помимо прочего, визуализации (например, карты), аудиовизуальные произведения (например, изображения, фильмы, звукозаписи, презентации и т.д.), различные данные (например, данные о местоположении, данные о погоде, данные о трафике, числовые данные и т.д.), текст (например, мнения, комментарии, вопросы, сообщения и т.д.), документы, электронные таблицы и т.д.
[029] В контексте настоящего описания термин «база данных» означает любой структурированный набор данных, независимо от его конкретной структуры, программного обеспечения для управления базой данных или компьютерных аппаратных средств для хранения этих данных, их применения или обеспечения их использования иным способом. База данных может располагаться в тех же аппаратных средствах, где реализован процесс, обеспечивающий хранение или использование информации, хранящейся в базе данных, либо база данных может располагаться в отдельных аппаратных средствах, таких как специализированный сервер или несколько серверов.
[030] В контексте настоящего описания числительные «первый» «второй», «третий» и т.д. используются лишь для указания различия между существительными, к которым они относятся, а не для описания каких-либо определенных взаимосвязей между этими существительными. Кроме того, как встречается в настоящем описании в другом контексте, ссылка на «первый» элемент и «второй» элемент не исключает того, что эти два элемента в действительности могут быть одним и тем же элементом.
[031] Каждый вариант осуществления настоящей технологии относится к по меньшей мере одной из вышеупомянутых целей и/или аспектов, но не обязательно ко всем ним. Должно быть понятно, что некоторые аспекты настоящей технологии, связанные с попыткой достижения вышеупомянутой цели, могут не соответствовать этой цели и/или могут соответствовать другим целям, явным образом здесь не упомянутым.
[032] Дополнительные и/или альтернативные признаки, аспекты и преимущества вариантов осуществления настоящей технологии содержатся в дальнейшем описании, приложенных чертежах и формуле изобретения.
Краткое описание чертежей
[033] Эти и другие признаки, аспекты и преимущества настоящей технологии поясняются в дальнейшем описании, в приложенной формуле изобретения и на следующих чертежах.
[034] На фиг. 1 представлена схема примера компьютерной системы для реализации некоторых неограничивающих вариантов осуществления настоящей технологии.
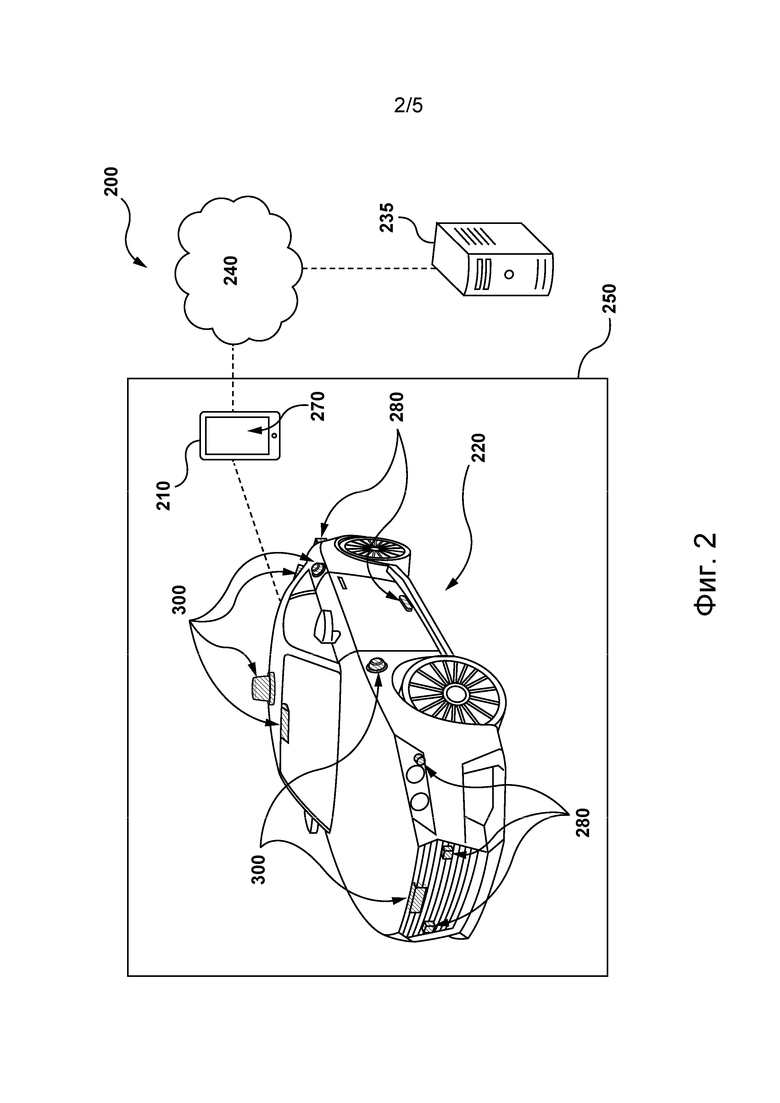
На фиг. 2 представлена схема сетевой вычислительной среды, подходящей для использования с некоторыми неограничивающими вариантами осуществления настоящей технологии.
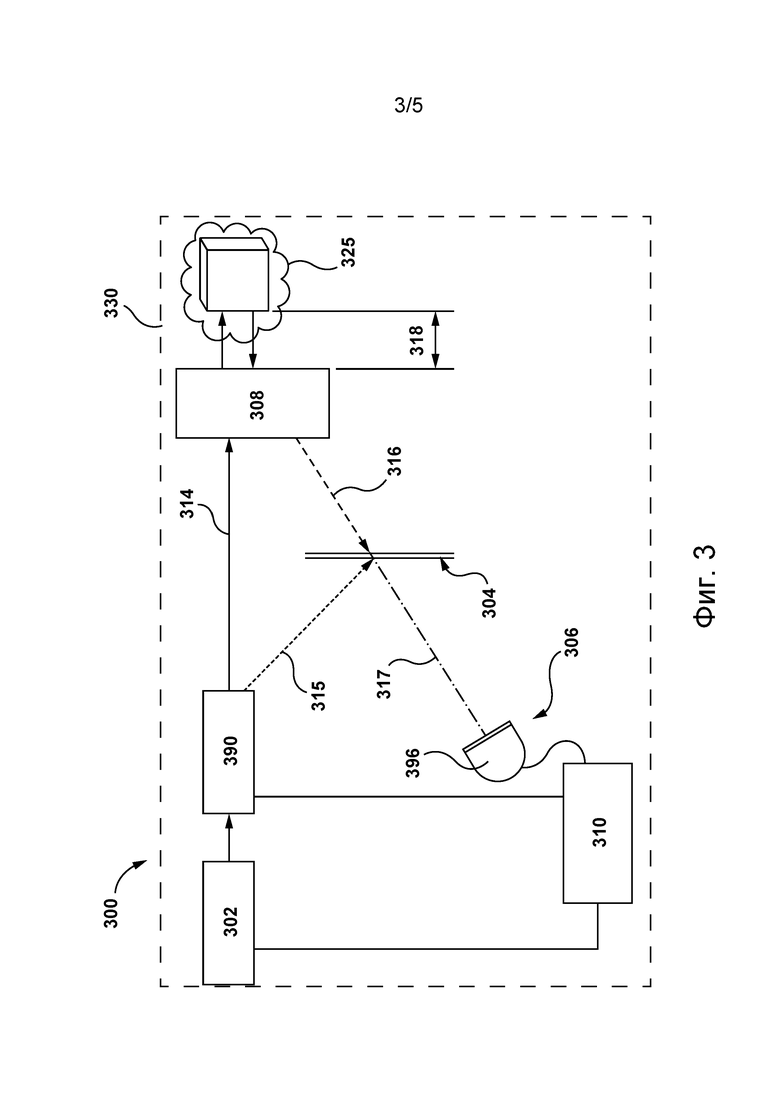
[036] На фиг. 3 представлена схема лидарной системы, реализованной в соответствии с некоторыми неограничивающими вариантами осуществления настоящей технологии.
[037] На фиг. 4 схематически показаны два пути луча лидарной системы, представленной на фиг. 3.
[038] На фиг. 5 представлена блок-схема способа, реализованного в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
[039] Следует отметить, что масштаб на чертежах не соблюдается, если не указано иное.
Осуществление изобретения
[040] Представленные в данном описании примеры и условный язык предназначены для обеспечения лучшего понимания принципов настоящей технологии, а не для ограничения ее объема до таких специально приведенных примеров и условий. Должно быть понятно, что специалисты в данной области техники способны разработать различные способы и устройства, которые явно не описаны и не показаны, но реализуют принципы настоящей технологии в пределах ее существа и объема.
[041] Кроме того, чтобы способствовать лучшему пониманию, последующее описание может содержать упрощенные варианты реализации настоящей технологии. Специалистам в данной области должно быть понятно, что различные варианты осуществления настоящей технологии могут быть значительно сложнее.
[042] В некоторых случаях приводятся полезные примеры модификаций настоящей технологии. Они способствуют пониманию, но также не определяют объема или границ настоящей технологии. Представленный перечень модификаций не является исчерпывающим и специалист в данной области может разработать другие модификации в пределах объема настоящей технологии. Кроме того, если в некоторых случаях модификации не описаны, это не означает, что они невозможны и/или что описание содержит единственно возможный вариант реализации того или иного элемента настоящей технологии.
[043] Описание принципов, аспектов и вариантов реализации настоящей технологии, а также их конкретные примеры предназначены для охвата их структурных и функциональных эквивалентов, независимо от того, известны они в настоящее время или будут разработаны в будущем. Например, специалистам в данной области техники должно быть понятно, что любые описанные здесь структурные схемы соответствуют концептуальным представлениям иллюстративных принципиальных схем, реализующих принципы настоящей технологии. Также должно быть понятно, что любые блок-схемы, схемы процессов, диаграммы изменения состояния, псевдокоды и т.п. соответствуют различным процессам, которые могут быть представлены на машиночитаемом физическом носителе информации и могут выполняться компьютером или процессором, независимо от того, показан такой компьютер или процессор явно или нет.
[044] Функции различных элементов, представленных на иллюстрациях, включая любой функциональный блок, обозначенный как «процессор», могут быть реализованы с использованием специализированных аппаратных средств, а также аппаратных средств, способных выполнять соответствующее программное обеспечение. Если используется процессор, его функции могут выполняться одним выделенным процессором, одним совместно используемым процессором или несколькими отдельными процессорами, некоторые из которых могут использоваться совместно. Кроме того, явное использование термина «процессор» или «контроллер» не должно трактоваться как указание исключительно на аппаратные средства, способные выполнять программное обеспечение, и может подразумевать, помимо прочего, аппаратные средства цифрового сигнального процессора (DSP), сетевой процессор, специализированную интегральную схему (ASIC), программируемую вентильную матрицу (FPGA), ПЗУ для хранения программного обеспечения, ОЗУ и энергонезависимое ЗУ. Также могут подразумеваться другие аппаратные средства, общего назначения и/или заказные.
[045] Программные модули или просто модули, реализация которых предполагается в виде программных средств, могут быть представлены здесь как любое сочетание элементов блок-схемы или других элементов, указывающих на выполнение шагов процесса и/или содержащих текстовое описание. Такие модули могут выполняться аппаратными средствами, показанными явно или подразумеваемыми.
[046] Далее с учетом изложенных выше принципов рассмотрены некоторые не имеющие ограничительного характера примеры, иллюстрирующие различные варианты реализации аспектов настоящей технологии.
[047] Компьютерная система
[048] На фиг. 1 представлена схема компьютерной системы 100, подходящей для использования в некоторых реализациях настоящей технологии. Компьютерная система 100 содержит различные аппаратные элементы, включая один или несколько одноядерных или многоядерных процессоров, совместно представленных процессором 110, твердотельный накопитель 120 и память 130, которая может быть памятью с произвольным доступом или памятью любого другого вида.
[049] Связь между элементами компьютерной системы 100 может осуществляться через одну или несколько внутренних и/или внешних шин (не показаны), таких как шина PCI, шина USB, шина FireWire стандарта IEEE 1394, шина SCSI, шина Serial-ATA и т.д., с которыми различные аппаратные элементы соединены электронным образом. Согласно вариантам осуществления настоящей технологии, твердотельный накопитель 120 хранит программные команды, пригодные для загрузки в память 130 и исполнения процессором 110 с целью определения наличия объекта. Например, программные команды могут входить в состав управляющего приложения транспортного средства, выполняемого процессором 110. Следует отметить, что компьютерная система 100 может содержать дополнительные и/или необязательные элементы (не показаны), такие как модули передачи данных по сети, модули определения местоположения и т.д.
[050] Сетевая вычислительная среда
[051] На фиг. 2 представлена сетевая вычислительная среда 200, подходящая для использования с некоторыми неограничивающими вариантами осуществления настоящей технологии. Сетевая вычислительная среда 200 содержит электронное устройство 210, связанное с транспортным средством 220 и/или связанное с пользователем (не показано), который связан с транспортным средством 220 (например, с водителем транспортного средства 220). Сетевая вычислительная среда 200 также содержит сервер 235, поддерживающий связь с электронным устройством 210 через сеть 240 связи (например, Интернет и т.п., как более подробно описано ниже).
[052] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии сетевая вычислительная среда 200 может включать в себя спутник GPS (не показан), передающий и/или принимающий сигнал GPS для электронного устройства 210. Должно быть понятно, что настоящая технология не ограничена применением системы GPS и может использовать технологию определения местоположения, отличную от системы GPS. Следует отметить, что спутник GPS может вовсе отсутствовать.
[053] Транспортное средство 220, с которым связано электронное устройство 210, может представлять собой любое транспортное средство для отдыха или иного назначения, например, личный или коммерческий автомобиль, грузовик, мотоцикл и т.п. Несмотря на то, что транспортное средство 220 изображено в виде наземного транспортного средства, это не обязательно для всех неограничивающих вариантов осуществления настоящей технологии. Например, в некоторых неограничивающих вариантах осуществления настоящей технологии транспортное средство 220 может быть водным транспортным средством, таким как катер, или летательным аппаратом, таким как дрон.
[054] Транспортное средство 220 может управляться пользователем или представлять собой беспилотное транспортное средство. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии предполагается, что транспортное средство 220 может быть реализовано как беспилотный автомобиль. Следует отметить, что при этом не накладывается каких-либо ограничений на конкретные параметры транспортного средства 220, например, такие как производитель транспортного средства, модель транспортного средства, год выпуска транспортного средства, масса транспортного средства, размеры транспортного средства, распределение массы транспортного средства, площадь поверхности транспортного средства, высота транспортного средства, вид трансмиссии (например, привод на два или на четыре колеса), вид шин, тормозная система, топливная система, пробег, идентификационный номер транспортного средства и рабочий объем двигателя.
[055] Согласно настоящей технологии, на реализацию электронного устройства 210 не накладывается каких-либо ограничений. Например, электронное устройство 210 может быть реализовано в виде блока управления двигателем транспортного средства, центрального процессора транспортного средства, навигационного устройства транспортного средства (например, TomTom™, Garmin™), планшета, персонального компьютера, встроенного в транспортное средство 220, и т.д. Следует отметить, что электронное устройство 210 может быть связано или не связано с транспортным средством 220 постоянным образом. Дополнительно или в качестве альтернативы, электронное устройство 210 может быть реализовано в устройстве беспроводной связи, таком как мобильный телефон (например, смартфон или радиотелефон). В некоторых вариантах осуществления изобретения электронное устройство 210 содержит дисплей 270.
[056] Электронное устройство 210 может содержать некоторые или все элементы компьютерной системы 100, представленной на фиг. 1, в зависимости от конкретного варианта осуществления. В некоторых вариантах осуществления изобретения электронное устройство 210 представляет собой бортовой компьютер и содержит процессор 110, твердотельный накопитель 120 и память 130. Иными словами, электронное устройство 210 содержит аппаратные средства и/или прикладное программное обеспечение и/или встроенное программное обеспечение либо их сочетание для обработки данных, как более подробно описано ниже.
[057] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии сеть 240 связи представляет собой сеть Интернет. В альтернативных не имеющих ограничительного характера вариантах осуществления настоящей технологии сеть 240 связи может быть реализована как любая подходящая локальная сеть (LAN, Local Area Network), глобальная сеть (WAN, Wide Area Network), частная сеть связи и т.п. Должно быть понятно, что варианты осуществления сети 240 связи приведены лишь в иллюстративных целях. Реализация линии связи (отдельно не обозначена) между электронным устройством 210 и сетью 240 связи зависит, среди прочего, от реализации электронного устройства 210. В качестве примера, но не ограничения, в тех не имеющих ограничительного характера вариантах осуществления настоящей технологии, где электронное устройство 210 реализовано в виде устройства беспроводной связи, такого как смартфон или навигационное устройство, эта линия связи может быть реализована в виде беспроводной линии связи. Примеры беспроводных линий связи могут включать в себя канал сети связи 3G, канал сети связи 4G и т.п., но не ограничиваются ими. В сети 240 связи также может использоваться беспроводное соединение с сервером 235.
[058] В некоторых вариантах осуществления настоящей технологии сервер 235 реализован в виде компьютерного сервера и может содержать некоторые или все элементы компьютерной системы 100, представленной на фиг. 1. В одном не имеющем ограничительного характера примере сервер 235 реализован в виде сервера Dell™ PowerEdge™, работающего под управлением операционной системы Microsoft™ Windows Server™, но он также может быть реализован с использованием любых других подходящих аппаратных средств, прикладного программного обеспечения и/или встроенного программного обеспечения либо их сочетания. В показанных неограничивающих вариантах осуществления настоящей технологии сервер 235 представляет собой одиночный сервер. В других не имеющих ограничительного характера вариантах осуществления данной технологии функции сервера 235 могут быть распределены между несколькими серверами (не показано).
[059] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии процессор 110 устройства 210 может быть связан с сервером 235 для получения одного или нескольких обновлений. Такие обновления могут включать в себя обновления программного обеспечения, обновления карт, обновления маршрутов, обновления погоды и т.п., но не ограничиваются этим. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии процессор 110 также может отправлять серверу 235 некоторые рабочие данные, такие как пройденные маршруты, данные о дорожном движении, рабочие характеристики и т.д. Некоторые или все такие данные, передаваемые между транспортным средством 220 и сервером 235, могут быть зашифрованы и/или обезличены.
[060] Следует отметить, что электронное устройство 210 может использовать различные датчики и системы для сбора информации об окружении 250 транспортного средства 220. Как видно на фиг. 2, транспортное средство 220 может быть оборудовано множеством систем 280 датчиков. Следует отметить, что различные системы датчиков из множества систем 280 датчиков могут использоваться для сбора данных различных видов об окружении 250 транспортного средства 220.
[061] В одном примере множество систем 280 датчиков может содержать различные оптические системы, включая, среди прочего, одну или несколько систем датчиков типа камеры, которые установлены на транспортном средстве 220 и связаны с процессором 110 электронного устройства 210. В общем случае одна или несколько систем датчиков типа камеры могут собирать данные изображения о различных частях окружения 250 транспортного средства 220. В некоторых случаях данные изображения, предоставленные одной или несколькими системами датчиков типа камеры, могут использоваться электронным устройством 210 при выполнении процедур обнаружения объекта. Например, электронное устройство 210 может подавать данные изображения, предоставленные одной или несколькими системами датчиков типа камеры, в нейронную сеть для обнаружения объектов, обученную определять положение потенциальных объектов в окружении 250 транспортного средства 220 и классифицировать эти объекты.
[062] В другом примере набор систем 280 датчиков может содержать одну или несколько систем датчиков радарного типа, которые установлены на транспортном средстве 220 и связаны с процессором 110. В общем случае в одной или нескольких из систем датчиков радарного типа для сбора данных о различных частях окружении 250 транспортного средства 220 могут использоваться радиоволны. Например, одна или несколько систем датчиков радарного типа позволяют собирать радиолокационные данные о потенциальных объектах в окружении 250 транспортного средства 220. Эти данные потенциально представляют дальность объектов от системы датчиков радиолокационного типа, ориентацию объектов, абсолютную скорость и/или относительную скорость объектов и т.п.
[063] Следует отметить, что набор систем 280 датчиков может содержать системы датчиков иных типов, помимо тех, примеры которых описаны выше, без выхода за рамки настоящей технологии.
[064] Лидарная система
[065] В соответствии с настоящей технологией, как показано на фиг. 2, транспортное средство 220 оборудовано по меньшей мере одной световой системой обнаружения и определения дальности, такой как лидарная система 300 (более подробно описана ниже), для сбора информации об окружении 250 транспортного средства 220. Несмотря на то, что здесь дано описание лишь в контексте установки на транспортное средство 220, также предполагается, что лидарная система 300 может работать автономно или с подключением к другой системе.
[066] В зависимости от варианта осуществления, транспортное средство 220 может содержать больше или меньше лидарных систем 300, чем показано на чертежах. В зависимости от конкретного варианта осуществления, выбор систем 280 датчиков может зависеть от конкретного варианта осуществления лидарной системы 300. Лидарная система 300 может быть установлена на транспортном средстве 220 изначально или при его модернизации в различных местах и/или в различных конфигурациях.
[067] Например, в зависимости от реализации транспортного средства 220 и лидарной системы 300, лидарная система 300 может быть установлена на внутренней верхней части лобового стекла транспортного средства 220. Тем не менее, как показано на фиг. 2, другие места для установки лидарной системы 300, в том числе на заднем окне, боковых окнах, переднем капоте, крыше, передней решетке, переднем бампере или сбоку транспортного средства 220, попадают в объем настоящего изобретения. В некоторых случаях лидарная система 300 может быть расположена в специальном кожухе, установленном сверху транспортного средства 220.
[068] В некоторых не имеющих ограничительного характера вариантах осуществления, например, показанных на фиг. 2, одна из нескольких лидарных систем 300 установлена на крыше транспортного средства 220 с возможностью вращения. Например, лидарная система 300, установленная на транспортном средстве 220 с возможностью вращения, может содержать некоторые элементы, способные поворачиваться на 360 градусов вокруг оси вращения лидарной системы 300. При установке с возможностью вращения лидарная система 300 может собирать данные о большинстве сегментов окружения 250 транспортного средства 220.
[069] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии, например, как показано на фиг. 2, лидарные системы 300 неподвижно устанавливаются сбоку или на передней радиаторной решетке. Например, лидарная система 300, установленная на транспортном средстве 220 без возможности вращения, может содержать по меньшей мере некоторые элементы, не способные вращаться на 360 градусов, но обеспечивающие сбор данных о заранее заданных сегментах окружения 250 транспортного средства 220.
[070] Независимо от конкретного местоположения и/или конкретной конфигурации лидарной системы 300, она обеспечивает сбор данных об окружении 250 транспортного средства 220, используемых, например, для построения многомерной карты объектов в окружении 250 транспортного средства 220. Далее подробно описано устройство лидарных систем 300 для сбора данных об окружении 250 транспортного средства 220.
[071] На фиг. 3 представлена схема одного конкретного варианта осуществления лидарной системы 300, реализованного в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
[072] В общем случае лидарная система 300 содержит несколько внутренних элементов, в частности, (1) источник 302 света (также называемый лазерным источником или источником излучения), (2) светоделительный элемент 304 (также называемый светоделителем), (3) блок 308 сканирования (также называемый узлом сканера или блоком сканера), (4) приемный блок 306 (также называемый системой обнаружения, приемным узлом, приемным блоком или детектором) и (5) контроллер 310. Предполагается, что в дополнение к элементам, примеры которых перечислены выше, лидарная система 300 может содержать несколько датчиков (таких как датчик температуры, датчик влажности и т.д.), которые для простоты не показаны на фиг. 3.
[073] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии один или несколько внутренних элементов лидарной системы 300 расположены в общем корпусе 330, как показано на фиг. 3. В некоторых вариантах осуществления настоящей технологии контроллер 310 может быть расположен вне общего корпуса 330, но связан с находящимися в нем элементами.
[074] Согласно не имеющим ограничительного характера вариантам осуществления настоящей технологии, лидарная система 300 в целом работает следующим образом. Источник 302 света лидарной системы 300 излучает непрерывный лазерный луч в узком диапазоне длин волн. Модуль 390 быстрого переключения разделяет свет от источника 302 света на короткие импульсы для первого оптического пути, формируя выходной луч 314, а световой луч 315, сформированный из остаточного света светового луча (не разделенного на импульсы), направляется по второму оптическому пути. Модуль 308 сканирования сканирует выходным лучом 314 окружение 250 транспортного средства 220 для обнаружения или фиксации данных заранее неизвестных объектов (таких как объект 320). Свет, отраженный от неизвестных объектов (таких как объект 320), принимается блоком 308 сканирования и направляется блоком 308 сканирования к блоку 306 обнаружения (через светоделительный элемент 304), образуя входной луч 316. Остаточный световой луч 315 от модуля 390 быстрого переключения по второму оптическому пути также направляется на светоделительный элемент 304, а затем на блок 306 обнаружения, так что лучи 315, 316 образуют объединенный луч 317. Блок 306 обнаружения, таким образом, обнаруживает объединенный луч 317, представляющий собой когерентную суперпозицию остаточного светового луча 315 (опорного луча) и входного светового луча 316 из окружения 250 (сигнального луча, несущего информацию об окружении 250). Электронные сигналы, принятые контроллером 310, соответствующие обнаруженному объединенному лучу 317, затем используются для определения расстояния 318 до по меньшей мере одного объекта 320 с целью формирования многомерной карты окружения 250, где объекты (включая объект 320) представлены в виде одной или нескольких точек данных. Работа лидарной системы 300 более подробно описана ниже.
[075] В качестве некоторых не имеющих ограничительного характера примеров, объект 320 может представлять собой (целиком или частично) человека, транспортное средство, мотоцикл, грузовик, поезд, велосипед, инвалидную коляску, прогулочную коляску, пешехода, животное, дорожный знак, светофор, разметку полосы движения, разметку дорожного покрытия, место для парковки, опору, ограждение, дорожный барьер, выбоину, железнодорожный переезд, препятствие на дороге или рядом с ней, бордюр, остановившееся транспортное средство на дороге или рядом с ней, столб освещения, дом, здание, мусорный бак, почтовый ящик, дерево, любой другой дорожный объект или любую комбинацию двух или более таких объектов или их частей.
[076] Например, объект 320 находится на расстоянии 318 от лидарной системы 300. Когда выходной луч 314 достигает объекта 320, объект 320 обычно отражает и/или рассеивает по меньшей мере часть света выходного луча 314 и некоторые из отраженных и/или рассеянных световых лучей могут возвращаться в лидарную систему 302, где они могут быть приняты в виде входного луча 316. Под отражением подразумевается, что по меньшей мере часть светового луча из выходного луча 314 отражается от объекта 320. Часть светового луча из выходного луча 314 может поглощаться или рассеиваться объектом 320.
[077] Подробности, касающиеся использования и реализации этих элементов лидарной системы 300 в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, описаны ниже.
[078] Источник света
[079] Источник 302 света связан с контроллером 310 и излучает свет с заданной рабочей длиной волны. Для этого в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии источник 302 света содержит по меньшей мере один лазер для работы на данной рабочей длине волны. Как более подробно описано ниже, источник 302 света в соответствии с настоящей технологией представляет собой постоянный лазерный источник 302, то есть лазерный источник 302 излучает непрерывный луч и не является импульсным лазером, которые обычно используются в лидарных системах с измерением времени пролета.
[080] Рабочая длина волны источника 302 света может находиться в инфракрасной, видимой и/или ультрафиолетовой частях электромагнитного спектра. Например, источник 302 света может содержать по меньшей мере один лазер с рабочей длиной волны приблизительно от 650 нм до 1150 нм. В качестве альтернативы, источник 302 света может содержать лазерный диод, излучающий световые лучи с длиной волны приблизительно от 800 нм до 1000 нм, приблизительно от 850 нм до 950 нм или приблизительно от 1300 нм до 1600 нм.
[081] Источник 302 света лидарной системы 300 обычно представляет собой безопасный для глаз лазер или, другими словами, лидарная система 300 может быть классифицирована как безопасная для глаз лазерная система или лазерное изделие. В общем случае безопасный для глаз лазер, лазерная система или лазерное изделие может быть системой с такими некоторыми или всеми из следующих параметров: длина волны излучения, средняя мощность, пиковая мощность, пиковая интенсивность, энергия импульса, размер луча, расходимость луча, время экспозиции и схема сканирования выходным лучом, что излучаемый этой системой свет представляет малую или нулевую вероятность повреждения глаз человека.
[082] Согласно некоторым не имеющим ограничительного характера вариантам осуществления настоящей технологии, рабочая длина волны источника 302 света может находиться в области электромагнитного спектра, соответствующей солнечному свету. Следовательно, в некоторых случаях солнечный свет может действовать как фоновый шум, способный заглушать световой сигнал, обнаруживаемый лидарной системой 300. Этот солнечный фоновый шум может приводить к ложным обнаружениям и/или иным образом искажать измерения лидарной системы 300. Несмотря на то, что в некоторых случаях может быть целесообразным увеличение отношения сигнал/шум (SNR) лидарной системы 300 путем увеличения уровня мощности выходного луча 314, в некоторых ситуациях это может быть нежелательным. Например, в некоторых случаях может быть нежелательно увеличивать мощность излучаемого света до уровней, превышающих безопасный для глаз порог.
[083] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии источник 302 света может содержать один или несколько лазерных диодов, включая лазерный диод Фабри-Перо, лазер с квантовыми ямами, лазер с распределенным брэгговским отражателем (DBR), лазер с распределенной обратной связью (DFB) или лазер с поверхностным излучением с вертикальным резонатором (VCSEL), но не ограничиваясь ими. В качестве примеров, лазерный диод в источнике 302 света может быть лазерным диодом на основе арсенида алюминия-галлия (AlGaAs), арсенида индия-галлия (InGaAs) или арсенид-фосфида индия-галлия ( InGaAsP) либо любой другой подходящий лазерный диод.
[084] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии источник 302 света излучает световой луч в виде коллимированного оптического луча, но предполагается, что полученный луч может иметь любую расходимость луча, подходящую для данного применения. В общем случае расходимость излучаемого светового луча является угловой мерой увеличения поперечного размера луча (например, радиуса или диаметра луча) по мере распространения света от источника 302 света или лидарной системы 300. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии световой луч может иметь по существу круглое поперечное сечение.
[085] Также предполагается, что световой луч, излучаемый источником 302 света, может быть неполяризованным или случайно поляризованным, может не иметь определенной или фиксированной поляризации (например, его поляризация может меняться со временем) или может иметь определенную поляризацию (например, выходной луч 314 может иметь линейную, эллиптическую или круговую поляризацию).
[086] Модуль быстрого переключения
[087] В соответствии с настоящей технологией, лидарная система 300 на фиг. 4 содержит модуль 390 быстрого переключения для модуляции светового луча, излучаемого источником 302 света. В частности, модуль 390 способен принимать непрерывный световой луч с узким диапазоном длин волн от источника 302 света.
[088] Как кратко описано выше, модуль 390 быстрого переключения разделяет непрерывный луч, принимаемый от источника 302 света, на два луча: выходной луч 314, сформированный из импульсов, излучаемых в первом направлении по первому оптическому пути, и остаточный луч 315, также называемый здесь остаточным световым лучом 315, в котором весь свет, не вошедший в упомянутые импульсы, направляется во втором направлении по вторичному оптическому пути. Разделение двух лучей 314, 315 схематично проиллюстрировано на фиг. 4, где мощность (Р) каждого из лучей 314, 315 приведена за период времени (Т) одного импульса. Модуль 390 быстрого переключения быстро переключается между отправкой света в виде двух лучей 314, 315. Следует отметить, что угол, показанный между выходным лучом 314 и остаточным световым лучом 315, то есть между первым направлением и вторым направлением, является лишь иллюстративным примером и не подразумевает ограничений.
[089] В некоторых не имеющих ограничительного характера вариантах осуществления модуль 390 быстрого переключения может быть реализован в виде акустооптического модулятора (АОМ). В такой реализации модулятор 390 быстро переключается между передачей импульсов в первом направлении и дифракцией (с использованием дифракции первого порядка) остающегося света во втором направлении. В некоторых вариантах осуществления порядок импульсного луча 314 и остаточного луча 315 может быть обратным. При использовании акустооптического модулятора 390 остаточный луч 315 получает небольшой частотный сдвиг (порядка десятков герц). Таким образом, в по меньшей мере некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии для определения времени пролета контроллер 310 может использовать метод детектирования на базе гетеродина даже для слабых отраженных сигналов, поскольку в блоке 306 обнаружения из-за небольшой относительной разности частот между излучаемыми лучами 314, 315 будет присутствовать компонента сигнала с частотой биений между входным лучом 316 и остаточным лучом 315.
[090] В некоторых не имеющих ограничительного характера вариантах осуществления модуль 390 быстрого переключения может быть реализован в виде электрооптического модулятора (EOM). В таких реализациях электрооптический модулятор 390 может быть расположен, например, в одной ветви интерферометра Маха-Цендера (Mach-Zehnder) с переключателями 2×2. В некоторых не имеющих ограничительного характера реализациях электрооптический модулятор 390 способен быстро переключать фазу светового луча от лазерного источника 302 и такое изменение фазы позволяет разделять световой луч по двум путям интерферометра. Таким образом, импульсы могут быть отправлены по первому пути для формирования выходного луча 314, а остаточный свет может быть отправлен по второму пути интерферометра для формирования остаточного луча 315.
[091] Следует отметить, что электрооптический модулятор обычно не инициирует сдвиг частоты между лучами 314, 315. Поэтому в некоторых не имеющих ограничительного характера вариантах осуществления, реализующих электрооптический модулятор, контроллер 310 может использовать способ гомодинного детектирования, где контроллер 310 обнаруживает относительное изменение фазы между входным лучом 316 и остаточным лучом 315. В некоторых не имеющих ограничительного характера вариантах осуществления может быть реализован режим балансного когерентного детектирования, помогая уменьшить шум, например, путем использования вторичного фотодетектора.
[092] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии лидарная система 300 может дополнительно содержать оптический усилитель для усиления импульсов выходного луча 314.
[093] Светоделительный элемент
[094] На фиг. 3 изображен дополнительно предусмотренный светоделительный элемент 304, расположенный в корпусе 330. Светоделительный элемент 304 широко известен как светоделительный элемент, но в не имеющих ограничительного характера вариантах осуществления настоящей технологии он используется для объединения входного луча 316 (попадающего в лидарную систему 300 из окружающей среды 250) с остаточным световым лучом 315, направленным к светоделительному элементу 304 из модуля 390 быстрого переключения, в объединенный луч 317. Светоделительный элемент 304 также обеспечивает направление объединенного луча 317 к блоку 306 обнаружения для его дальнейшей обработки контроллером 310.
[095] Следует отметить, что светоделительный элемент 304 обычно разделяет интенсивность (оптическую мощность) падающего на него излучения на два направления (или два волокна в случае оптоволоконных разветвителей). В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии светоделительный элемент 304, таким образом, образует два объединенных луча 317. Согласно настоящему не имеющему ограничительного характера варианту осуществления, используется и далее обсуждается лишь один объединенный луч 317. Тем не менее, предполагается, что оба объединенных луча 317 могут использоваться в методе балансного детектирования.
[096] В зависимости от конкретного варианта осуществления, светоделительный элемент 304 может равномерно разделять интенсивность падающего на него света. В других не имеющих ограничительного характера вариантах осуществления настоящей технологии светоделительный элемент 304 может поровну разделять интенсивность выходного луча 314 между сканирующим лучом и остаточным лучом. Например, светоделительный элемент 304 может направлять до 80% интенсивности падающего на него света в первом направлении, а остальную часть (до 20% интенсивности падающего света) - во втором направлении. В других не имеющих ограничительного характера вариантах осуществления настоящей технологии светоделительный элемент 304 может изменять коэффициент деления падающего на него света (например, от 1% до 95% интенсивности падающего на него света).
[097] В зависимости от реализации лидарной системы 300, светоделительный элемент 304 может быть реализован в различных формах, включая элемент светоделителя на основе стеклянной призмы, элемент светоделителя на основе полусеребряного зеркала, элемент светоделителя на основе дихроичной зеркальной призмы и т.п., но не ограничиваясь ими. Для волоконно-оптических реализаций лидарной системы 300 светоделительный элемент 304 может быть реализован как волоконно-оптический светоделительный элемент , например, как оптоволоконный разветвитель луча 50/50.
[098] Внутренние пути луча
[099] Как схематично изображено на фиг. 3 и фиг. 4, лидарная система 300 имеет множество внутренних путей, по которым лучи света распространяются внутри лидарной системы 300. Как упомянуто выше, свет лазера, излучаемый источником 302 света, модулируется модулем 390 быстрого переключения для создания двух лучей - выходного луча 314 и остаточного луча 315. Выходной луч 314 направляется в блок 308 сканирования (более подробно описанный ниже), который сканирует выходным лучом 314 поле обзора лидарной системы 300. Свет, отраженный и/или рассеянный объектами из окружения 250, затем снова поступает в лидарную систему 300 через блок 308 сканирования в виде входного луча 316.
[0100] Далее входной луч 316 посредством блока 308 сканирования и/или дополнительных оптических элементов направляется через светоделительный элемент 304 к блоку 306 обнаружения. В некоторых реализациях лидарная система 300 может иметь пути лучей, направляющие входной луч 316 непосредственно из окружения 250 в блок 306 обнаружения (без прохождения входного луча 316 через блок 308 сканирования).
[0101] Остаточный луч 315 с остаточным светом, отличным от импульсов, направляется от модуля 390 быстрого переключения к светоделительному элементу 304 . В зависимости от реализации, остаточный луч 315 может направляться к светоделительному элементу 304 непосредственно (например, по оптическому волокну) либо лидарная система 300 может содержать дополнительные оптические элементы для направления остаточного о луча 315 к светоделительному элементу 304.
[0102] В светоделительном элементе 304 входной луч 316 и остаточный луч 315 когерентно накладываются друг на друга для формирования объединенного луча 317. Затем блок 306 обнаружения принимает объединенный луч 317. Предполагается, что объединенный луч 317 может направляться между светоделительным элементом 304 и блоком 306 обнаружения с помощью дополнительных оптических элементов.
[0103] Несмотря на то, что здесь показано излучение света в любой момент времени в виде лишь одного из лучей 314, 315, следует отметить, что в блоке 306 обнаружения возможна интерференция объединенного луча 317 из-за дополнительного расстояния, пройденного импульсами выходных/входных лучей 314, 316 по сравнению с остаточным лучом 315 (и, следовательно, затраченного на это времени).
[0104] Следует также отметить, что в различных неограничивающих вариантах осуществления настоящей технологии множество внутренних путей луча может содержать несколько оптических элементов. Например, лидарная система 300 может содержать один или несколько оптических элементов, обеспечивающих возможность регулировки, формирования, фильтрации, модификации, отклонения и направления света в лидарной системе 300, например, выходного луча 314 и/или входного луча 316. В частности, лидарная система 300 может содержать одну или несколько линз, зеркал, фильтров (например, полосовых или интерференционных фильтров), оптических волокон, циркуляторов, светоделителей, поляризаторов, поляризационных светоделителей, волновых пластин (например, полуволновых или четвертьволновых пластин), дифракционных элементов, микроэлектромеханических (МЕМ) элементов, коллиматорных элементов или голографических элементов.
[0105] Предполагается, что в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии один внутренний путь луча и другой внутренний путь луча из множества внутренних путей луча могут совместно использовать некоторые общие оптические элементы, однако это может быть реализовано не в каждом варианте осуществления настоящей технологии.
[0106] Блок сканирования
[0107] В общем случае блок 308 сканирования направляет выходной луч 314 по одному или нескольким направлениям в окружающую среду 250. Блок сканирования 308 связан с контроллером 310. Контроллер 310 предназначен для управления блоком 308 сканирования, чтобы направлять выходной луч 314 в нужном направлении и/или по заранее заданной схеме сканирования. В целом, в контексте настоящего описания «схема сканирования» может относиться к схеме или пути, по которому выходной луч 314 направляется блоком 308 сканирования во время работы.
[0108] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии контроллер 310 инициирует сканирование блоком 308 сканирования с использованием выходного луча 314 во множестве горизонтальных угловых диапазонов и/или вертикальных угловых диапазонов. Общий угол сканирования выходным лучом 314, обеспечиваемый блоком 308 сканирования, называется здесь полем обзора. Предполагается, что расположение, ориентация и/или угловые диапазоны могут зависеть от конкретной реализации лидарной системы 300. Поле обзора обычно включает в себя несколько интересующих областей, определяемых как части поля обзора, которые могут содержать, например, интересующие объекты. В некоторых реализациях блок 308 сканирования может обеспечивать дальнейшее обследование выбранной интересующей области 325. Интересующая область 325 лидарной системы 300 может относиться к площади, объему, области, угловому диапазону и/или частям окружения 250, где лидарная система 300 может выполнять сканирование и/или фиксировать данные.
[0109] Следует отметить, что местоположение объекта 320 в окружении 250 транспортного средства 220 может частично или полностью перекрываться, охватываться или заключаться в интересующей области 325 лидарной системы 300.
[0110] Следует также отметить, что в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, блок 308 сканирования может сканировать выходным лучом 314 по горизонтали и/или вертикали и, соответственно, интересующая область 325 лидарной системы 300 может иметь горизонтальное направление и вертикальное направление. Например, интересующая область 325 может быть определена углом 45° в горизонтальном направлении и 45° в вертикальном направлении. В некоторых случаях разные оси сканирования могут иметь разную ориентацию.
[0111] В соответствии с не имеющими ограничительного характера вариантами осуществления настоящей технологии для обеспечения сканирования выходным лучом 314 интересующей области 325 блок 308 сканирования содержит пару зеркал (отдельно не показаны), каждое из которых независимо связано с соответствующим гальванометром (отдельно не показан), обеспечивающим управление им. Контроллер 310 инициирует через соответствующие гальванометры вращение каждой пары зеркал вокруг соответствующей одной из взаимно перпендикулярных осей, сканируя интересующую область 325 согласно заранее заданной схеме сканирования.
[0112] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии, блок 308 сканирования может дополнительно содержать множество других оптических и/или механических элементов для сканирования выходным лучом 314. Например, блок 308 сканирования может содержать одно или несколько зеркал, призм, линз, микроэлектромеханических элементов, пьезоэлектрических элементов, оптических волокон, делителей, дифракционных элементов, коллиматорных элементов и т.п. Следует отметить, что блок 308 сканирования может также содержать один или несколько дополнительных исполнительных механизмов (отдельно не показанных), приводящих в действие по меньшей мере некоторые другие оптические элементы, например, для их вращения, наклона, поворота или перемещения под углом вокруг одной или нескольких осей.
[0113] Таким образом, лидарная система 300 может использовать заданную схему сканирования для создания облака точек, в целом покрывающего интересующую область 325 лидарной системы 300. Это облако точек лидарной системы 300 может использоваться для визуализации многомерной карты объектов в окружении 250 транспортного средства 220. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии заранее заданная схема сканирования для сканирования интересующей области 325 может быть связана с соответствующей частотой сканирования.
[0114] Блок обнаружения
[0115] Согласно некоторым не имеющим ограничительного характера вариантам осуществления настоящей технологии блок 306 обнаружения связан с контроллером 310 и может быть реализован различными способами. В соответствии с настоящей технологией, блок 306 обнаружения содержит фотодетектор 307, но может содержать фотоприемник, оптический приемник, оптический датчик, детектор, оптический детектор, оптические волокна и т.п., но не ограничиваясь ими. Как более подробно описано ниже, в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии блок 306 обнаружения получает или обнаруживает по меньшей мере часть объединенного луча 317.
[0116] В некоторых не имеющих ограничительного характера вариантах осуществления блок 306 обнаружения может также содержать схему, выполняющую усиление сигнала, выборку, фильтрацию, преобразование сигнала, аналого-цифровое преобразование, временное цифровое преобразование, обнаружение импульсов, обнаружение порога, обнаружение нарастающего фронта, обнаружение спадающего фронта и т.п. Например, блок 306 обнаружения может содержать электронные элементы для преобразования принятого фототока (например, тока, создаваемого диодом ЛФД в ответ на принятый оптический сигнал) в сигнал напряжения. Блок 306 обнаружения может также содержать дополнительную схему для формирования аналогового или цифрового выходного сигнала, соответствующего одной или нескольким характеристикам (например, переднему фронту, заднему фронту, амплитуде, длительности и т.п.) принятого оптического импульса.
[0117] Контроллер
[0118] В зависимости от конкретной реализации, контроллер 310 может содержать один или несколько процессоров, специализированную интегральную схему (ASIC), программируемую вентильную матрицу (FPGA) и/или другие подходящие схемы. Контроллер 310 также может содержать энергонезависимую машиночитаемую память для хранения команд, выполняемых контроллером 310, а также данных, которые контроллер 310 может создавать на основе сигналов, получаемых от других внутренних элементов лидарной системы 300 и передаваемых другим внутренним элементам лидарной системы 300. Память может содержать энергозависимые элементы (например, RAM) и/или энергонезависимые элементы (например, флэш-память, жесткий диск). Контроллер 310 может собирать данные во время работы и сохранять их в памяти. Например, такие данные, сформированные контроллером 310, могут указывать на точки данных в облаке точек лидарной системы 300.
[0119] Предполагается, что в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии контроллер 310 может быть реализован аналогично электронному устройству 210 и/или компьютерной системе 100 без выхода за рамки объема настоящей технологии. В дополнение к сбору данных от блока 306 обнаружения, контроллер 310 также может подавать управляющие сигналы на источник 302 света и блок 308 сканирования и получать диагностические данные от них.
[0120] Как указано выше, контроллер 310 связан с источником 302 света, модулем 390 быстрого переключения, блоком 308 сканирования и блоком 306 обнаружения. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии контроллер 310 может принимать электрические запускающие импульсы от модуля 390 быстрого переключения, где каждый электрический запускающий импульс соответствует излучению оптического импульса источником 302 света. Контроллер 310 может дополнительно предоставлять команды, управляющий сигнал и/или сигнал запуска модулю 390 быстрого переключения, указывающие на то, когда модуль 390 быстрого переключения должен генерировать оптические импульсы, соответствующие, например, выходному лучу 314.
[0121] Кроме того, контроллер 310 может отправлять электрический запускающий сигнал, включающий в себя электрические импульсы для излучения света источником 302 света в ответ на этот электрический запускающий сигнал. Также предполагается, что контроллер 310 может инициировать изменение источником 302 света одной или нескольких характеристик выходного луча 314, формируемого источником 302 света, таких как частота, период, длительность, энергия импульса, пиковая мощность, средняя мощность и длина волны оптических импульсов.
[0122] В соответствии с настоящей технологией, контроллер 310 позволяет определять значение «времени пролета» для оптического импульса с целью вычисления расстояния между лидарной системой 300 и одним или несколькими объектами в поле обзора, как кратко описано выше. Определение времени пролета основано на информации о времени, связанной (1) с первым моментом времени, когда оптический импульс (например, выходной луч 314) формируется модулем 390 быстрого переключения, и (2) со вторым моментом времени, когда часть оптического импульса (например, от входного луча 316) была обнаружена или принята блоком 306 обнаружения. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии первый момент времени может указывать на момент времени, когда контроллер 310 излучает соответствующий электрический импульс, связанный с оптическим импульсом, а второй момент времени может указывать на момент времени, когда контроллер 310 принимает от блока 306 обнаружения электрический сигнал, формируемый в ответ на прием части оптического импульса из входного луча 316.
[0123] В соответствии с настоящей технологией, контроллер 310 определяет, когда отраженный импульс от входного луча 316 достигает блока 306 обнаружения, используя когерентное детектирование (гетеродинное детектирование или гомодинное детектирование) для выделения импульса из объединенного луча 317. Таким образом, даже слабые отраженные или рассеянные импульсы могут быть обнаружены в данных входного луча с высоким уровнем шума. Конкретные методы и расчеты для когерентного (гетеродинного или гомодинного) детектирования известны в данной области техники и их подробное описание здесь опущено.
[0124] В соответствии с настоящей технологией, контроллер 310 позволяет определять на основе первого момента времени и второго момента времени значения времени пролета и/или значения фазового сдвига излучаемого импульса выходного луча 314. Величина времени T пролета, в определенном смысле, представляет собой время пути излучаемого импульса в обе стороны, требуемое для пролета от лидарной системы 300 к объекту 320 и назад в лидарную систему 300. Таким образом, контроллер 310 позволяет определять расстояния 318 в соответствии со следующим уравнением:
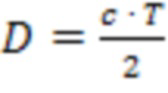 , (1)
, (1)
где D - расстояние 318, T - значение времени пролета, c - скорость света (приблизительно 3×108 м/с).
[0125] Как упоминалось ранее, лидарная система 300 может использоваться для определения расстояния 318 до одного или нескольких других потенциальных объектов, расположенных в окружении 250 транспортного средства. Путем сканирования выходным лучом 314 заданной интересующей области 325 лидарной системы 300 в соответствии с заранее заданной схемой сканирования, контроллер 310 определяет расстояния (аналогичные расстоянию 318) до соответствующих точек данных в интересующей области 325 лидарной системы 300. После этого контроллер 310 обычно обеспечивает последовательную фиксацию этих точек (например, облака точек) в виде многомерной карты. В некоторых реализациях данные, относящиеся к определенному времени пролета и/или к расстояниям до объектов, могут представляться в разных форматах данных.
[0126] Многомерная карта может использоваться электронным устройством 210 для обнаружения или иной идентификации объектов либо для определения формы потенциальных объектов или расстояния до них в пределах интересующей области 325 лидарной системы 300. Предполагается, что лидарная система 300 способна многократно или итеративно фиксировать и/или формировать облака точек с любой скоростью, подходящей для данного применения.
[0127] Способ управления лидарной системой
[0128] На фиг. 6 представлена блок-схема способа 500 для управления лидарной системой 300. Способ 500 подробно описан далее в соответствии с не имеющими ограничительного характера вариантами осуществления настоящей технологии.
[0129] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии способ 500 может быть реализован контроллером 310, связанным с лидарной системой 300. Как обсуждалось ранее, в по меньшей мере некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии контроллер 310 может содержать один или несколько процессоров и может быть реализован аналогично электронному устройству 210 и/или компьютерной системе 100 без отклонения от объема настоящей технологии. Реализация способа 500 начинается с шага 510.
[0130] Шаг 510: инициирование излучения лазерным источником светового луча в узкополосном диапазоне.
[0131] На шаге 510 контроллер 310 предоставляет команды, управляющий сигнал и/или запускающий сигнал источнику 302 света, указывающий на то, что источник 302 света должен излучать свет в узкополосном диапазоне, то есть с небольшой шириной полосы длин волн, в направлении к блоку 308 сканирования. Как упомянуто выше, в настоящей технологии источник 302 света представляет собой лазерный источник 302. Лазерный источник 302 создает световой луч с практически постоянной мощностью излучения.
[0132] Шаг 520: управление модулем быстрого переключения для модуляции амплитуды испускаемого светового луча – обеспечения коротких импульсов в первом направлении и остаточного света во втором направлении.
[0133] На шаге 520 контроллер 310 управляет модулем 390 быстрого переключения, чтобы модулировать амплитуду света, формируемого лазерным источником 302, для излучения света в двух направлениях. Модуль 390 быстрого переключения выдает серию коротких импульсов для формирования выходного луча 314 в первом направлении и направляет остаточный световой луч 315 во втором направлении к светоделительному элементу 304. В конкретных не имеющих ограничительного характера вариантах осуществления первое и второе направления могут иметь любое относительное положение, не ограничиваясь вариантом, показанным на чертежах. Например, в некоторых не имеющих ограничительного характера вариантах осуществления лучи 314, 315 могут излучаться параллельно друг другу, а затем направляться в волоконно-оптические элементы. В некоторых не имеющих ограничительного характера вариантах осуществления контроллер 310 может управлять длительностью и/или частотой импульсов выходного луча 314.
[0134] Шаг 530: инициирование испускания блоком сканирования коротких сканирующих световых импульсов из системы в направлении окружающих объектов.
[0135] На шаге 530 контроллер 310 управляет блоком 308 сканирования, испускающим выходной луч 314 в виде лазерных импульсов наружу в окружение 250. Схема и частота сканирования зависят от конкретного варианта осуществления блока 308 сканирования, а также от длительности и частоты импульсов выходного луча 314.
[0136] Шаг 540: прием электронных сигналов от блока обнаружения, принимающего объединенный сигнал остаточного света светового луча и отраженного сигнала от окружающих объектов.
[0137] На шаге 540 контроллер 310 принимает электронные сигналы от блока 306 обнаружения, соответствующие обнаружению объединенного луча 317. Входной луч 316 направляется по меньшей мере блоком 308 сканирования к светоделительному элементу 304 . В светоделительном элементе 304 входной луч 314 и остаточный световой луч 315 объединяются и объединенный луч 317, который направляется к фотодетектору 396 блока 306 обнаружения. Как упомянуто выше, фотодетектор 396 является квадратичным фотодетектором для обнаружения линейного наложения волн двух лучей 316, 317. Таким образом, контроллер 310 принимает электрические сигналы, по меньшей мере включая постоянный сигнал, связанный с суммой лучей 316, 317, и переменный сигнал, соответствующий произведению электрических полей лучей 316, 317.
[0138] Шаг 550: определение расстояния до по меньшей мере одного из окружающих объектов на основе времени пролета, вычисленного при обработке электронных сигналов, полученных из объединенного сигнала.
[0139] На шаге 550 контроллер 310 определяет (или вычисляет) расстояние 318 до по меньшей мере одного объекта 320. Контроллер 310 определяет время пролета одного или нескольких импульсов выходного луча 314, выходящих из лидарной системы 300, отражающихся от по меньшей мере одного объекта 320 и достигающих блока 306 обнаружения.
[0140] Как упомянуто выше, контроллер 310 определяет время пролета на основе электрических сигналов при оптической интерференции объединенного луча 317 на фотодетекторе 396, используя метод гетеродинного детектирования. В некоторых не имеющих ограничительного характера вариантах осуществления способа 500 контроллер 310 может использовать гомодинные методы детектирования. Также предполагается, что в некоторых не имеющих ограничительного характера вариантах осуществления способ 500 может включать в себя использование дополнительных фотодетекторов для определения времени пролета методом балансного когерентного детектирования.
[0141] Специалистам в данной области должно быть понятно, что некоторые варианты осуществления настоящей технологии могут быть направлены на расширение арсенала технических решений конкретной технической проблемы, а именно, повышения качества слабых сигналов в лидарной системе при ограничении выходной мощности источника света лидарной системы.
[0142] Для специалиста в данной области могут быть очевидными возможные изменения и усовершенствования описанных выше вариантов осуществления настоящей технологии. Предшествующее описание приведено лишь в иллюстративных целях, а не для ограничения объема изобретения. Объем охраны настоящей технологии определяется исключительно объемом приложенной формулы изобретения.
[0143] Несмотря на то, что описанные выше варианты реализации приведены со ссылкой на конкретные шаги, выполняемые в определенном порядке, должно быть понятно, что некоторые из этих шагов могут быть объединены, разделены или что их порядок может быть изменен без отклонения от настоящей технологии. Соответственно, порядок и группировка шагов не носят ограничительного характера для настоящей технологии.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИЧЕСКИЕ СИСТЕМЫ И СПОСОБЫ УПРАВЛЕНИЯ ИМИ | 2020 |
|
RU2793241C2 |
| МУЛЬТИСПЕКТРАЛЬНЫЕ ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ | 2020 |
|
RU2792948C2 |
| ЛИДАРНАЯ СИСТЕМА И СПОСОБ КАЛИБРОВКИ ЛИДАРНОЙ СИСТЕМЫ | 2021 |
|
RU2829088C1 |
| ЛИДАРНАЯ СИСТЕМА И СПОСОБ КАЛИБРОВКИ ЛИДАРНОЙ СИСТЕМЫ | 2021 |
|
RU2829904C1 |
| Способ и процессор для классификации точек на границе многоугольного участка | 2023 |
|
RU2836700C1 |
| ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ С ВЫБОРОЧНЫМ СКАНИРОВАНИЕМ | 2020 |
|
RU2792951C2 |
| ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ | 2020 |
|
RU2789827C2 |
| Лидарные системы и способы | 2020 |
|
RU2798364C2 |
| Лидарные системы и способы | 2020 |
|
RU2798363C2 |
| СПОСОБ И СЕРВЕР ДЛЯ ОБНОВЛЕНИЯ ПРЕДСТАВЛЕНИЯ КАРТЫ | 2024 |
|
RU2836391C1 |


Использование: настоящая технология относится к световым системам обнаружения и определения дальности (LiDAR, Light Detection and Ranging) в целом и, в частности, к системам и способам сканирования окружающей среды с использованием когерентного детектирования. Сущность: лидарная система с измерением времени пролета содержит лазерный источник, излучающий световой луч в узкополосном диапазоне, модуль быстрого переключения, излучающий короткие импульсы светового луча по первому оптическому пути, а остающуюся часть светового луча - по второму оптическому пути, блок сканирования, испускающий короткие импульсы в направлении от системы к окружающим объектам, по меньшей мере один оптический элемент, объединяющий остаточный свет во втором оптическом пути и сигнал, отраженный в систему от окружающих объектов, блок обнаружения, принимающий объединенный сигнал, и контроллер, обрабатывающий электронные сигналы от блока обнаружения, полученные из объединенного сигнала, и определяющий расстояние до по меньшей мере одного из окружающих объектов путем определения времени пролета, вычисленного при обработке электронных сигналов, полученных из объединенного сигнала. Технический результат: повышение качества слабых сигналов в лидарной системе при ограничении выходной мощности источника света лидарной системы. 2 н. и 11 з.п. ф-лы, 5 ил.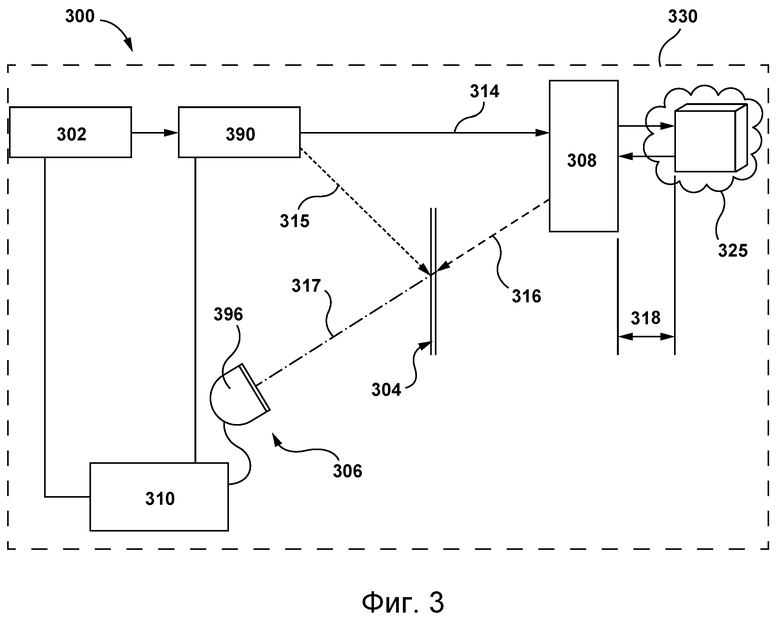
- лазерный источник, выполненный с возможностью излучать световой луч в узкополосном диапазоне;
- оптический модуль, размещенный с возможностью принимать световой луч от лазерного источника и модулировать амплитуду светового луча для излучения
коротких импульсов светового луча по первому оптическому пути и
остаточного света светового луча по второму оптическому пути;
- блок сканирования, расположенный на первом оптическом пути и выполненный с возможностью сканировать короткими импульсами светового луча в направлении от системы к окружающим объектам;
- по меньшей мере один оптический элемент, выполненный с возможностью объединять в объединенный сигнал остаточный световой луч на втором оптическом пути и отраженный сигнал, отраженный в систему от окружающих объектов;
- блок обнаружения, выполненный с возможностью принимать объединенный сигнал; и
- контроллер, соединенный с возможностью связи с блоком обнаружения и выполненный с возможностью обрабатывать электронные сигналы от блока обнаружения, полученные из объединенного сигнала, и определять расстояние до по меньшей мере одного из окружающих объектов на основе времени пролета, вычисленного при обработке электронных сигналов, полученных из объединенного сигнала.
7. Система по п. 1, в которой блок обнаружения содержит первый фотодетектор и второй фотодетектор, каждый из которых выполнен с возможностью принимать по меньшей мере часть объединенного сигнала.
10. Способ управления оптической системой, включающий в себя:
- инициирование контроллером испускания лазерным источником светового луча в узкополосном диапазоне;
- управление контроллером оптического модуля для модуляции амплитуды испускаемого светового луча в по меньшей мере двух направлениях – коротких импульсов светового луча и остаточного света светового луча;
- инициирование контроллером испускания блоком сканирования коротких импульсов светового луча в направлении от системы к окружающим объектам;
- прием контроллером электронных сигналов от блока обнаружения, принимающего объединенный сигнал, являющийся комбинацией остаточного света светового луча и отраженного сигнала, отраженного в систему от окружающих предметов; и
- определение контролером расстояния до по меньшей мере одного объекта из окружающих объектов на основе времени пролета, вычисленного при обработке электронных сигналов, полученных из объединенного сигнала.
11. Способ по п. 10, отличающийся тем, что управление оптическим модулем содержит управление контроллером акустооптического модулятора.
12. Способ по п. 10, в котором определение времени пролета контроллером включает в себя определение времени пролета методом гетеродинного детектирования.
13. Способ по п. 10, дополнительно включающий в себя инициирование контроллером усиления интенсивности коротких импульсов светового луча оптическим усилителем, функционально расположенным между оптическим модулем и блоком сканирования.
| US 20190310372 A1, 10.10.2019 | |||
| WO 2020037842 A1, 27.02.2020 | |||
| US 20200271764 A1, 27.08.2020 | |||
| WO 2019149688 A1, 08.08.2019 | |||
| WO 2018055449 A9, 17.05.2018 | |||
| KR 20200068284 A, 16.05.2020. |

